Embed Size (px)
Citation preview
Einleitung
Ermittlung von Landeskoordinaten aus GPS-Messungen *
Von J. Strehle, München
Leider ist es nicht möglich, auf einfache Weise aus den mit GPS-Messungen gewonnenen X, Y, Z-Koordinaten im System WGS84 unmittelbar Gebrauchskoordinaten der Landesvermessung zu gewinnen.
Ursachen:
Mangelhafte Genauigkeit der WGS84-Koordinaten
- die WGS84-Koordinaten der Satelliten können selbst im Rahmen des Post-Processing nur mit einer Genauigkeit von ca. I m bestimmt werden (hauptsächlich wegen nicht modeltierbarer Strahlungsdruckeffekte)
- die von den Satelliten abgestrahlten Bahndaten werden künstlich um Beträge bis zu 100m verHilscht (Selective Availability).
Die Genauigkeit der Satellitenposition im WGS84-System fällt also bezüglich der Genauigkeit der fundamentalen Tracking-Stationen deutlich ab.
Auswirkung auf die Positionsbestimmung
Die Satelliten sind die Punkte, durch welche das WGS84-System für den GPS-Benutzer realisiert wird. Aus diesen Punkten abgeleitete absolute Koordinaten beliebiger Stationen können also nicht genauer sein, als die Position der Satelliten selber. Schon aus diesem Grund kann noch nicht einmal Metergenauigkeit für die Koordinaten von Neupunkten erreicht werden. Da aber Fehler der Satellitenposition bei simultanen Messungen zu den selben Satelliten auf mehreren Stationen zu fast identischen Fehlereinflüssen führen, erzielt man eine hohe relative Genauigkeit bei der Positionsbestimmung, während die absolute Zuordnung zum WGS84-Koordinatensystem nur mit untergeordneter Genauigkeit möglich ist.
• Nach einem Vonrag gehalten, beim Seminar »EinfUhnmg in die Pruis der GPS-Messungen« des DVW-Landesverein Bayern am 15. März 1996 in München
Mitteilungsblau DVW-Bayem 4/1996 623

Ausweg: »Fiducial Point«·Konzept
Aber selbst wenn die aus GPS·Messungen gewonnenen Koordinaten im System WGS84 auch absolut mit ausreichender geodätischer Genauigkeil zu erhalten wären, könnte man daraus trotzdem nicht Landeskoordinaten über allgemeingültige Umrechnungsformeln gewinnen.
Fehler in den Koordi!U1ten des Deutschen Hauptdreiecksnetzes (DHDN)
Das DHDN beruht nicht auf einem einheitlichen und homogenen Referenz· system, sondern auf verschiedenen, regional variierenden Systemen. lnfolge dieser Netzverzerrungen ist es nicht möglich, den Zusammenhang zwischen dem zu einem dreidimensionalen System erweiterten DHDN und einem mo· derneo terrestrischen Referenzsystem durch eine räumliche Ähnlichkeits· Iransformation mit bckanmen Transformationsparametern herzustellen. Fühn man ftir das gesamte Gebiet des DHDN eine räumliche überbestimmte Ähnlichkeitstransfonnation durch, so ergeben sich Restklaffungen in der Größenordnung von Im für Lage. und Höhcnkoordinaten.
Räumliche Koordinatentransformation (Dreidimensionale Ähnlichkeitstransformation)
Die Übertragung zwischen zwei dreidimensionalen kartesischen Koordinatensystemen mit einheit· Iichen Maßstäben auf den jeweils drei Achsen ist minels
- dreier Translationen - drcier Rotationen und - eines Maßstabsfaktors
möglich, also mit insgesamt
- 7 Transformationsparamctern.
z, l,
Die Transformationsgleichung lautet in Matrizenschreibweise:
y,
624 Mitteilungsblatt DVW-ßayern 4/1996

Xz: Koordinaten des Zielsystems Xs: Koordinaten des Startsystems
t: Vektor der Translationen Maßstabsfaktor
R: Rotationsmatrix
Die 3 x 3 Rotationsmatrix R besteht aus folgenden Komponenten:
I cosß
.
cosy cosa siny +sina sinß cos y sina siny - cosa sinß c?sy
-cosß siny cosa. cosy- sina sinß siny sina cosy + cosa. sinß sm y
Slnß -sina cosß cosa cosß
a: Drehwinkel um X-Achse Alle Drehungen im
ß: Drehwinkel um die mitgedrehte Y-Achse Gegenuhncigersinn
y. Drehwinkel um die neue Z-Aehse
Für sehr kleine Drehwinkel da , dß und dy kann R mit
sin da = da und cos da = I
vereinfacht werden zu:
Mit: Zielsystem Startsystem
dy
1
R' =I _;, dß -da
(X,Y,Z)BES
(X,Y,Z)WGS84
I + dm
-dß I da
1
erhält man aus GL(l) folgende Transfonnationsgleiehungen:
Xees-TR = tl( +(1+dmHXwGS84 + YwGs84 ·dy -ZWGS84 ·dß);
YaEs-TR = ty +{1+dm)·{-Xwas64 ·dy + YwaS84 +ZwaS84 ·da); (2) Zees-TR = t� +(1+dm)·(Xwas84 ·dß- Ywas84 ·da+Zw0584);
Will man die 7 Transformationsparameter aus einer Ausgleichung bestimmen, so benötigt man insgesamt mindestens drei identische Punkte. Jeder identische Punkt liefen drei Verbesserungsgleichungen. Die umgeformten Verbesserungsgleichungen
v =A· �-I haben folgenden Aufbau:
Mitteilungsblatt DVW-Bayem 411996 625

v, v, v, Vx A =
0 0 0 -Z Y X Xwo.s-X 0 Z 0 -Z Y Y&:s- Y 1 -Y X 0 Z lses-Z
0 0 0 -Z Y X x= da I= Xaes-X d�
dy
dm
Koordinaten ohne Index beziehen sich auf das System WGS84.
Aus dem System der umgeformten Verbesserungsgleichungen werden nach den Regeln der Ausgleichung von vermittelnden Beobachtungen die Unbekannten ermittelt.
Restklaffungen:
Hinweise:
Vx = XsE:s. TR -Xaes V�= YaeS-TR- Yaes v, = Zses:m - Zses
- die Drehwinkel werden im Bogenmaß erhalten,
- durch die Einführung der Matrix R' anstelle von R wird die Ausgleichung linear,
- will man die Varianz-Kovarianz-Matrizen der Koordinaten berücksichtigen und wahlweise Unbekannte mil einem vorgegebenen Wert anhalten, so wählt man besser ein anderes Ausgleichungsmodell (Gauß-He\mertModell: bedingte Ausgleichung mit Unbekannten).
Netzbildung
Aus der gleichzeitigen Beobachtung von zwei Stationen läßt sich im System WGS84 der Basisvektor ax, .1.Y, !:JZ zwischen den beiden Stationen berech·nen.
Dazu müssen die Koordinaten einer Station im System WGS84 festgehalten werden. Näherungsweise kann man davon ausgehen, daß ein Punktlagefehler von 20m einen Maßstabsfehler der Basislinie von etwa I ppm hervonuft. Natürlich beobachtet man in der Regel mehrere Basislinien und achtet darauf, daß man Überbestimmungen erhält. Um für alle Basislinien einen einheitlichen Maßstab zu gewährleisten, darf man nur die WGS84-Koordi-
626 Mitteilungsblatt DVW-Bayem 411996
naten für den Referenzpunkt einer Basislinie festhalten. Die Referenzpunkte für die anderen Basislinien müssen von diesem Referenzpunkt aus abgeleitet werden.
Vorteil: Haben alle Basislinien (Basisvektoren) den gleichen Maßstab und erfolgt später eine Transfonnation über identische Punkte zur Berechnung von Landeskoordinaten, so wird der Maßstabsfehler eliminiert.
Korrelationen
Bei der Auswertung einzelner Basislinien entstehen Korrelationen zwischen den drei Komponenten der Basislinie, die in den Protokollen der Auswertesoftware angegeben werden (Single Baseline Solution).
Werden mehr als zwei GPS-Empf<inger gleichzeitig eingesetzt und werden alle Basislinien gleichzeitig ausgewertet (Multi Baseline Solution), so entstehen auch Korrelationen zwischen den einzelnen Basislinien. Diese Lösung wird allerdings nicht von jeder GPS-Software angeboten.
Ausgleichung
Bei nonnalen Genauigkeitsansprüchen bedient man sich häufig der kurzzeitstatischen Methode (»Rapid-static«). Im einfachsten Fall bleibt für die Dauer der gesamten Messung ein Referenzpunkt statisch besetzt und ständig auf Empfang. Ein zweiter mobiler Empf<inger (Rover) besetzt der Reihe nach die zu bestimmenden Punkte während eines relativ kurzen Zeitraums (ca. 10 Minuten). Die Auswertung der Beobachtungen mit der Software des GPS-Herstellers liefert die Koordinaten der Punkte im System WGS84, die dann in Landeskoordinaten umzuformen sind.
Bei höheren Genauigkeitsansprüchen wird man, wie in der Geodäsie allgemein üblich, danach trachten, Überbestimmungen zu erhalten, d. h. man wird mehr als nur die unbedingt notwendige Anzahl von Basislinien beobachten. Die Bestimmung der kartesischen Koordinaten der Netzpunkte im System WGS8 4 muß dann allerdings durch eine Ausgleichung nach vennittelnden Beobachtungen erfolgen, bevor daraus Koordinaten des Landessystems abgeleitet werden können.
Die auszugleichenden Beobachtungen bilden die Komponenten der Basisvektoren vom Punkt Pi nach Pj'
Mitteilungsblatt DVW-Bayem 4/1996 627

Ursprüngliche Verbesserungsgleichungen für jede Basislinie:
X, Y, Z: Vollständige Unbekannte; LlX, 11Y, I:J.Z: Beobachtungen Verbesserungen
Es handeiL sich um ein einfaches lineares Ausgleichungsproblem, so daß die umgefonnten Verbesserungsgleichungen sofort angeschrieben werden kön-
Verkür.de Unbekannte: 'X, 9, 2 Verkürzte Beobachtungen:
I&X1 =llX,�(Xf�X�); lli.Y1 =6Yij�(Yj0�Yi0); I<IZ1 =dl,�(Zf�Z�);
Näherungswerte der Unbekannten: xo,yo,zo Die Koeffizienten bei den Unbekannten sind a1le 0, + 1 oder - 1
Die V crbesserungsgleichungen aller Basislinien werden in der Matrizengleichung:
V=A-��1 zusammengefaßt und nach den üblichen Regeln der Ausgleichungsrechnung weiterbehandele Bis auf einen Punkt werden die dreidimensiona1en kartesischen Koordinaten sämtlicher Punkte als Unbekannte eingeführt. Die Koordinaten eines Punktes müssen angehalten werden, damit die Lagerung des Netzes gewährleistet ist.
Für die Gewichtsmatrix P gilt:
P = E (Einheitsmatrix): gleichgenaue und unabhängige Beobachtungen
P = diag(P): verschieden genaue, jedoch unabhängige Beobachtungen mit den Gewichten in der Diagonalen
P = vollbesetzt korrelierte (abhängige) Beobachtungen
628 Mitteilungsblau DVW-Bayern 4/1996
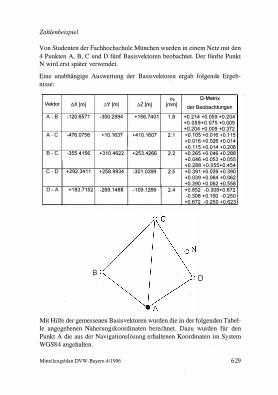
Zahlenbeispiel
Von Studenten der Fachhochschule München wurden in einem Netz mit den 4 Punkten A, B, C und D fünf Basisvektoren beobachtet. Der fünfte Punkt N wird erst späler verwendet.
Eine unabhängige Auswertung der Basisvektoren ergab folgende Ergebnisse:
Oo 0-Matrix Vektor öX[m] aY[mj !J.Z{m] [�[ der Beobachtungen A - B -120.6571 -300.2994 +156.7401 1.8 +0.214 +0.059 +0.204
+0.059+0.075 +0.009 +0.204 +0.009 +0.372
A-C -476.0756 +10.1637 +410.1607 2.1 +0.105 +0.016+0.115
+0.016 +0.026 +0.014
+0.115 +0.014 +0.206 B - C -355.4156 +310.4622 +253.4266 2.2 +0.265 +0.046 +0.288
+0.046 +0.053 +0.055 +0.288-+0.055+0.454
C-0 -+292.3411 -+258.9934 -301.0399 2.5 +0.391 +0.039 -+0.390
-+0.039-+0.064 +0.062
+0.390-+0.062 +0.558
0-A +183.7152 -269.1486 -109.1266 2.4 -+0.852 -0.308+0.672
-0.308 +0.150-0.250 +0.672 -0.250-+0.623
B 0
Mit Hilfe der gemessenen Basisvektoren wurden die in der folgenden Tabelle angegebenen Näherungskoordinaten berechnet. Dazu wurden für den Punkt A die aus der Navigationslösung erhaltenen Koordinaten im System WGS84 angehalten.
Mitteilungsblatt DVW-Bayem 411996 629

Die durchgeführten Beobachtungen werden in drei Varianten einer vermittelnden Ausgleichung unterzogen, wobei jeweils die Koordinaten des Punktes A angehaUen werden, um einen Rangdefekt auszuschalten. Die einzelnen Lösungen unterscheiden sich lediglich durch die Gewichtsmatrix ftir die Komponenten der Basislinien. Die Designmatrix A (enthält die Koeffizienten der verkürzten Unbekannten) und der Vektor I der verkürzten Beobachtungen (Dimension: mm) bleiben dagegen bei allen Ausgleichungsvarianten identisch.
Reihenfolge der Unbekannten: X8, Y8, Z8, Xe. Yc. Zc.X0, Yl)• Zo.
·-1 A = 0 -1
Variante!:
0 -1 0 0 -1
-1 -1 0 -1
29 I= -0.9
0 (mm] 6.0 -19.3
8.3 -5.8
-1 0 -1
Alle Komponenten der Basislinien werden als unabhängige und gleichgenaue Beobachtungen in die Ausgleichung eingeführt. Dadurch wird die Gewichtsmatrix P identisch mit der Einheitsmatrix E und es gelten die vereinfachten Beziehungen:
630 Millcilungsblatt DVW·Bayem 4/1996

Nonnalgleichungsmatrix Absolutgliedvektor
N=ATPA=ATA; n=ATPI=ATJ;
N=
Variante2:
• 0 0 -1 0 0 0 0 0 0 • 0 0 -1 0 0 0 0 0 0 • 0 0 -1 0 0 0 -1 0 0 0 -1 0 0 -1 0 � 0 0 -1 0 0 -1 0 0 � 0 0 -1 0 0 0 -1 0 0 • 0 0 0 0 -1 0 0 • 0 0 0 0 -1 0 0 •
-2.9 0.9
-6.0 22.2
n= -9.2 11.8
-19 .3 8.3
-5.8
Bei der Auswertung der Basisvektoren erhält man zusätzlich lnfonnationen bezüglich der erreichten Genauigkeit (siehe Angaben). Bei diesem Beispiel sind ftir jedeo Vektor die Standardabweichung der Gewichtseinheit a0 und die Gewichtskoeffizienten der einzelnen Komponenten der Basislinien (Basisvektoren) gegeben. Betrachtet man diese Komponenten als unabhängige Beobachtungen, so können in einfacher Weise Beobachtungsgewichte P; berechnet werden aus:
p1 = c/a12; c: Konstante; a12 = alq11: Varianz der i. Beobachtung;
Für den Vektor A-B erhält man z.B. mit c = I:
p{M) = 1f(oi·q(�)) p(AY) = 1/(cro2·q(AYAY)) p(t..Z)= 11(cro2·q(.L\Z.t..Z))
Mineilungsblatt DVW-Bayem 411996
1/(1.82·0.214) 1/(1.82·0.075) 1/(1.82·0.372)
1.44 4.12 0.83
63 1

Die GewichlSmatrix P wird nun eine Diagonalmatrix mit den Beobachtungsgewichten Pi in der Diagonalen:
1.44 4.12
0.83
0.20 0 1.16
0.28
Die Normalgleichungsmatrix N = A TpA und der Absolutgliedvektor n = A Tpt ergeben sich zu·
m -0.78
� -3.90
� -0.46
..{1.78 0 � ..{1.41
N � -3.90 &12 0 0 -2.50
-0.46 JM -0.29
-0.41 !ill 0
-2.50 0 � 0
0 -0.29 MI
nr • 1 -2.262 3.510 -2.760 10.175 -24.260 4.442 -7.913 20.750 -1.6132 1
Variante 3:
Bei dieser Lösung sollen nicht nur die unterschiedlichen Genauigkeiten der einzelnen Komponenten der Basisvektoren, sondern auch deren gegenseitige Korrelationen (Abhängigkeiten) berücksichtigt werden, die bei der Auswertung der Basislinien entstehen. Dazu benötigt man die Varianz-Kovarianzmatrix der korrelierten Beobachtungen, die allerdings durch die GPSAuswerteprogramme meist nicht direkt angegeben wird. Dafür ist bei
632 Mitteilungsblatt DVW-Bayem 411996

diesem Beispiel die Matrix der Gewichtskoeffizienten Q und die Standardabweichung der Gewichtseinheit cr0 gegeben. Die Varianz-Kovarianzmatrix L erhält man durch Multiplikation der Q-Matrix mit der Varianz der Gewichtseinheit cr02.
Daraus wird die Gewichtsmatrix P ftir korrelierte Beobachtungen durch Invertierung der Varianz-Kovarianzmatrix gewonnen aus:
L = Oo2·Q; c·Q = L; p = a-1 = ((1/c) ·L )"1 = C·L"1
Beachte:
cr02: Varianz der Gewichtseinheit aus der Auswertung der Basislinien
Schätzwert für die Varianz der Gewichtseinheit zur Netzausgleichung
Berechnung der Gewichtsmatrix P A-B für den Vektor A-B mit wiederum c = 1:
I 0.214 0.059 0.204 1 1 4.896 -3.539 -2.599 1 !:=crtQ=1.8'· 0.059 0.075 0.009 P.._.8= -3.539 6.686 1.779
0.204 0.009 0.372 -2.599 1.779 2.212
In gleicher Weise sind für die anderen Vektoren die Gewichtsmatrizen zu bestimmen, die dann zur Gesamtgewichtsmatrix P zusammengefaßc werden.
Pa.c Pc.o
Mitteilungsblatt DVW-Bayem 411996 633
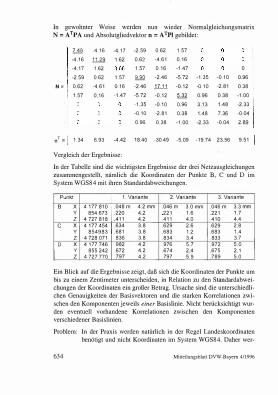
In gewohnter Weise werden nun wieder Nonnalgleichungsmatrix N = A TpA und Absolutgliedvektor n = A T'pJ gebildet:
lli -4.16 -4.17 -2.59 0.62 1.57
-4.16 � 1.62 0.62 -4.61 0.16
-4.17 1.62 3.68 1 57 0.16 -1.47 0
-2.59 0.62 1.57 � -2.46 -5.72 -1.35 -0.10 0.96
"' 0.62 -4.61 0.16 -2.46 1Lll -0.12 -0.10 -2.81 0.38
1.57 0.16 -1.47 -5.72 -0.12 � 0.96 0.38 -1.00
-1.35 -0.10 0.96 3.13 1.48 -2.33
-0.10 -2.81 0.36 1.48 7.36 -0.04
0.% 0.38 -1.00 -2.33 -0.04 2.89
n' =I 1.34 6.93 -4.42 18.40 -30.49 -5.09 -19.74 23.56 9.51
Vergleich der Ergebnisse:
In der Tabelle sind die wichtigsten Ergebnisse der drei Netzausgleichungen zusammengestellt, nämlich die Koordinaten der Punkte B, C und D im System WGS84 mit ihren Standardabweichungen.
Punkt 1.Variante 2. Variante 3.Variante
B X 4 177 810 048m 4.2mm 046m 3.0mm .046m 3.3 rm1 y 854 673 .220 4 2 221 1.6 .221 1.7
z 4 727 818 411 4.2 .411 4.0 .410 4.4
c X 4 177 454 .634 3.8 .629 2.6 .629 2.8
y 854983 .681 3 8 .683 1.2 .683 1.4
z 4 728 071 836 3.8 .834 3.4 .833 3.7
D X 4 177 746 982 4 2 .976 5.7 .972 5.0
y 855 242 672 4.2 .674 2.4 .675 2.1
z 4 727 770 797 4.2 .797 5.9 789 5.0
Ein Blick auf die Ergebnisse zeigt, daß sich die Koordinaten der Punkte um bis zu einem Zentimeter unterscheiden, in Relation zu den Standardabweichungen der Koordinaten ein großer Betrag. Ursache sind die unterschiedlichen Genauigkeiten der Basisvektoren und die starken Korrelationen zwischen den Komponenten jeweils einer Basistinie. Nicht berücksichtigt wurden eventuell vorhandene Korrelationen zwischen den Komponenten verschiedener Basislinien.
Problem: In der Praxis werden natürlich in der Regel Landeskoordinaten benötigt und nicht Koordinaten im System WGS84. Daher wer-
634 Mitteilungsblatt DVW-Bayem 411996
den in den nächsten Kapiteln die wichtigsten Möglichkeiten zur Übetführung der Koordinaten vom System WG$84 ins Lan· deskoordinatensystem aufgezeigt.
DreidimensionaJe Überführung der GPS-Koordinaten
in Landeskoordinaten
Ergebnisse von GPS-Messungen: X, Y, Z-Koordinaten im System WGS84
Aus den in der Einleitung genannten Gründen können diese Koordinaten nur mit Hilfe von identischen Punkten in Koordinaten des Landessystems (Gauß-Krüger Koordinaten) umgeformt werden, da es nicht möglich ist, die Wene von allgemein gültigen Transformationsparametern zu beslimmen. Dabei wird man selbstverständlich immer bemüht sein, mehr identische Punkte zur Verfügung zu haben, als zur gerade eindeutigen Bestimmung der Transfonnationsparameter notwendig sind => Ausgleichungsproblem.
Da es sich bei den Koordinaten des Systems WGS84 um dreidimensionale Koordinaten handelt, bietet sich natürlich eine dreidimensionale Lösung als der theoretisch naheliegende Weg zur Zusammenführung von GPS-Netzen und Netzen der Landesvermessung an.
Hinweis: Bei dieser Lösung werden keinerlei Infonnalionen bezüglich der gegenseitigen Lage beider System benötigt
Formeln: siehe Anhang I
Skizzen: siehe Anhang 2
Miueilungsblan DVW-Bayem 4/1996 635

Erforderliche Einzelschritte:
OHON, OHHN, NN-Undutationen Identische Punkte samtliehe Punkte
(R,H,HNN)eEs '
0 u
(ß,l,h)eEs u 0 u
(X,Y,Z)&s u
Landeskoordinaten (R,H,HNN)BEs.-m n 49 n
Ellipsoidische Koordinaten (B,L,hlats-m " @ n
Kartesische Koordinaten (X,Y,ZAAos.-lR " Räumliche Ähnlichkeitstransformation � •�. t.,., t,, a, ß. y, m
WGS84 " (X,Y,Z}wa56-4
" Ausgleichung der Basisvektoren
Basisvektoren (6X,.�Y,,!Q,}w0sa�. (6X:�,L\Y2,AZ2J...vGSM ... (�Xn.t. Y n.AZnMoasa.o
0 Berechnung von kartesischen Koordinaten X, Y, Z aus ellipsoidischen Koordinaten B, L, h
8 Berechnung von ellipsoidisehen Koordinaten B, L, h aus kartesischen Koordinaten X, Y, Z
0 Berechnung von Gauß-Krüger Koordinaten R, H und der Meereshöhe HNN aus ellipsoidischen Koordinaten B, L, h und der NN-Undulation U
0 Berechnung von ellipsoidischen Koordinaten B, L, h aus Gauß-Krüger Koordinaten R, H, der Meereshöhe HNN und der NN-Undulationen U
Zweidimensionale Überrührung der GPS-Koordinaten in Landeskoordinaten
Die dreidimensionale Zusammenführung von terrestrischen und GPS-Netzen setzt nivellitisch bestimmte Höhen der identischen Punkte und Kenntnis
636 Mitteilungsblatt DVW-Bayern 411996

der NN-Undulationen aller Punkte voraus ("cm-Geoid"). Sind diese Voraussetzungen nicht erfüllt, so kann man die Zusammenführung auch zweidimensional durchführen.
Lösung ohne Vortransformation
OHON Identische Punkte
(R,H)eEs Landeskoordinaten u
Ebene Transformation
WGS84 Gauß'sche konforme Koordinaten bezogen auf das WGS84-EIIipsoid
(R.H�ss• " ,;) "
(B,L,h}M:;S84 '
Samtliehe Punkte
(R,H)eES.ffi "
(h einfach weglassen)
Ausgleichung der Basisvektoren
Basisvektoren: (tl.X1,J.Y1.&1�se•. {tl.X,,t!.Y2,t. Z2,)wose• ... (6X".6.Yn,C.Z")wGseo
Hinweis: Die ebene Transfonnation darf streng genommen nicht als ebene ÄhnlichkeitstranSfonnation durchgeführt werden, da ein Ellipsoidübergang stattfindet. Stau dessen müßte man eine aufwendigere konfonne Transfonnation anwenden. Gelegentlich behilft man sich trotzdem mit einer ebenen Ähnlichkeitstransformation oder mit einer Affintransfonnation und erzielt bei kleinen Umformungsgebieten ausreichende Ergebnisse.
Mitteilungsblau DVW-Bayem 411996 637
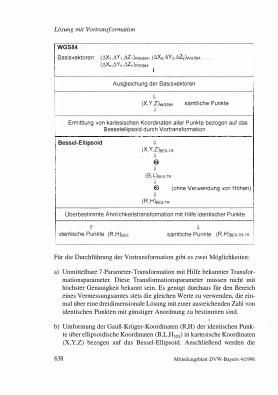
Lösung mit Vortransformation
WGS84 Basisvektoren: (UX,,.lY1,.<l.Z,}w0S84, (t.N:,tlY2,jQ2}woS84,
(L\)(",6 Y n.C.Z.,)wG$8-4
Ausgleichung der Basisvektoren
u (X,Y,Z)..ro$8-4 sämtliche Punkte
J Ermittlung von kartesischen Koordinaten aller Punkte bezogen auf das
Sesselellipsoid durch Vortransformation
Bessei-Eitipsold u (X,Y,Z}ees-m u
el u
(B,L)eEs-TR u @) {ohne Verwendung von Höhen) u
(R,H)eES-TR
Überbestimmte Ähnlichkeitstransformation mit Hilfe identischer Punkte
" u identische Punkte (R,H}ee8 sämtliche Punkte (R,H)ees-m-TR
Für die Durchftihrung der Vortransformation gibt es zwei Möglichkeiten:
a) Unmittelbare 7-Parameter-Transformation mit Hilfe bekannter Transformationspanuneter. Diese Transformationsparameter müssen nicht mit höchster Genauigkeit bekannt sein. Es genügt durchaus für den Bereich eines Vermessungsamtes steiS die gleichen Werte zu verwenden, die einmal über eine dreidimensionale Lösung mit einer ausreichenden Zahl von identischen Punkten mit günstiger Anordnung zu bestimmen sind.
b) Umformung der Gauß-Krüger-Koordinaten (R,H) der identischen Punkte über ellipsoidische Koordinaten (B,L,HNN) in kartesische Koordinaten (X, Y ,Z) bezogen auf das Bessel-Ellipsoid. Anschließend werden die
638 Mittellung»blau DVW-Bayem 411996

Koordinaten des Systems WGS84 über eine überbestimmte ?-ParameterTransformation in kartesiSche Koordina1en des Bessel-EIIipsoids transformiert. Die Verwendung von NN-Höhen anstelle der eigentlich einzuführenden ellipsoidischen Höhen h ist hier im Gegensatz zur dreidimensionalen Lösung nicht schädlich. Die Kenntnis der NN-Undulationen ist hier also nicht notwendig.
Beispiel:
Für die vorher durch eine vermittelnde Ausgleichung bestimmten Koordinaten der Punkte 8, C und D im System WGS84 stehen auch Gauß-Krüger Koordinaten und NN-Höhen zur Verfügung. Dazu kommt noch der Neupunkt N, der nur im System WGS84 bekannt ist. In dem sehr kleinräumigen Gebiet treten Undulationsunterschiede lediglich in der Größenordnung von einigen Millimetern auf, so daß auf die Einftihrung von ellipsoidischen Höhen verzichtet wird. Für die Koordinaten im System WGS84 werden die Ergebnisse der Ausgleichungsvariante 3 herangezogen.
Punkt
A B c 0 N
Punkt
A B c 0
GPS-Koordinaten
X[m) Y[m) Z[m) 4 177 930.704 854 973.520 ! 4 727 661.672 4 177 810 046 854 673.221 4 727 818.410 4 177 454.629 854 983.683 l 4 728 071.833 4 177 746.972 855 242.675 1 4 727 770.789 4 177 656.721 855 170.975 4 727 888.696
Landeskoordinaten (GK-Koordinaten)
R[m) H[m) 44 67 749 610 1 53 33 616.210 I 44 67 480.960 53 33 855.190 44 67 858.500 53 34 235.170 44 68 051.050 53 33 781.200
HüNN [m} 520.518 518.188 516.146 517.672
Mitteilungsblan DVW-Bayem 411996 639
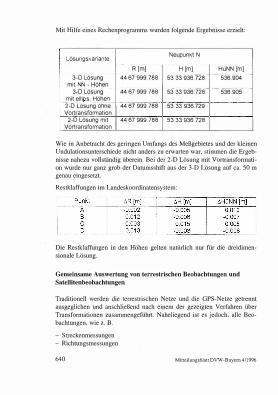
Mit Hilfe eines Rechenprogramms wurden folgende Ergebnisse erzielt:
Lösungsvariante Neupunkt N
R[m] H[m] HüNN[mJ
3-0 Lösung 44 67 999.788 53 33 936.728 536.904 mit NN - Höhen
3-D Lösung 44 67 999.788 53 33 936.728 536.905 mit el!i s. Höhen 2-D Lösung ohne 44 67 999.788 53 33 936.729 Vortransformation
2-0 Lösung mit 44 67 999.788 53 33 936.728 Vortransformation
Wie in Anbetracht des geringen Umfangs des Meßgebietes und der !deinen Undulationsunterschiede nicht anders zu erwarten war, stimmen die Ergebnisse nahezu vollständig überein. Bei der 2-D Lösung mit Vortransformation wurde nur ganz grob der Datumsshirt aus der 3-D Lösung auf ca. 50 m genau eingesetzt.
Restklaffungen im Landeskoordinatensystem:
Die Restklaffungen in den Höhen gelten natürlich nur für die dreidimensionale Lösung.
Gemeinsame Auswertung von terrestrischen Beobachtungen und
Satellitenbeobachtungen
Traditionell werden die terrestrischen Netze und die GPS-Netze getrennt ausgeglichen und anschließend nach einem der gezeigten Verfahren über Transformationen zusammengeführt. Naheliegend ist es jedoch, alle Beobachtungen, wie z. B.
- Streckenmessungen - Richtungsmessungen
640 Mitteilungsblatt DVW-Bayem 411996
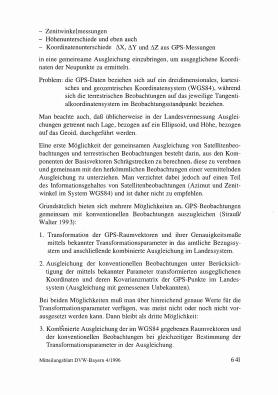
- Zenitwinkelmessungen - Höhenumerschiede und eben auch - Koordinatenunlerschiede !\X, 6. Y und t:JZ aus GPS-Messungen
in eine gemeinsame Ausgleichung einzubringen, um ausgeglichene Koordinaten der Neupunkte zu ennitteln.
Problem: die GPS-Daten beziehen sich auf ein dreidimensionales, kartesisches und geozentrisches Koordinatensystem (WGS84), während sich die terrestrischen Beobachtungen auf das jeweilige Tangentialkoordinatensystem im Beobachtungsstandpunkt beziehen.
Man beachte auch, daß üblicherweise in der Landesvennessung Ausgleichungen getrennt nach Lage, bezogen auf ein Ellipsoid, und Höhe! bezogen auf das Geoid, durchgeführt werden.
Eine erste Möglichkeit der gemeinsamen Ausgleichung von Satellitenbeobachtungen und terrestrischen Beobachtungen besteht darin, aus den Komponenten der Basisvektoren Schrägstrecken zu berechnen, diese zu verebnen und gemeinsam mit den herkömmlichen Beobachtungen einer vermittelnden Ausgleichung w unterziehen. Man verzichtet dabei jedoch auf einen Teil des lnfonnationsgehaltes von Satellitenbeobachtungen {Azimut und Zenitwinkel im System WGS84) und ist daher nicht zu empfehlen.
Grundsätzlich bieten sich mehrere Möglichkeiten an, GPS-Beobachtungcn gemeinsam mit konventionellen Beobachtungen auszugleichen (Strauß/ Walter 1993):
I . TransfonnatiOn der GPS-Raumvektoren und ihrer Genauigkeitsmaße mittels bekanmer Transfonnationsparameter in das amtliche Bezugssystem und anschließende kombinierte Ausgleichung im Landessystem.
2. Ausgleichung der konventionellen Beobachtungen unter Berücksichtigung der mittels bekannter Parameter trdflsformierten ausgeglichenen Koordinaten und deren Kovarianzmatrix der GPS-Punkte im Landessystem ( Ausgleichung mit gemessenen Unbekannten).
Bei beiden Möglichkeiten muß man über hinreichend gcnaue Werte für die Transfonnationsparameter verfügen, was meist nicht oder noch nicht vorausgesetzt werden kann. Dann bleibt als dritte Möglichkeit:
3. Kombinierte Ausgleichung der im WGS84 gegebenen Raumvektoren und der konventionellen Beobachtungen bei gleichzeitiger Bestimmung der Transfonnationsparameter in der Ausgleichung.
Milteilungsblan DVW-Bayem 411996 641
Natürlich muß die Ausgleichung in einem einheitlichen Koordinatensystem durchgeführt werden. Auch daflir gibt es mehrere Möglichkeiten:
- auf den Mittelpunkt des Referenzellipsoids bezogene kartesische Koordinaten X, Y, Z,
- ellipsoidische Koordinaten B, L, h und
- Koordinaten im Abbildungssystem, in Deutschland also Gauß-Krüger Koordinaten.
Je nach Wahl des Koordinatensystems muß das funktionale Modell der Ausgleichung aufgestellt werden, d. h. der Zusammenhang zwischen den Beobachtungen auf der einen Seite und den Unbekannten (Parametern) der Ausgleichung auf der anderen Seite ist zu formulieren (ursptüngliche Verbesserungsgleichungen):
Beobachtung + Verbesserung= Funktion der ausgeglichenen Unbekannten
Ausgleichung in kartesischen Koordinaten X, Y,Z des Landessystems
'" + '• = f ( it;. �;. i;. 51:.,� •. i".Ö;. �. ß. y.�); 1;�::: durchgeführte Beobachtung von Punkt i nach Punkt k
V;�:: zugehörige Verbesserung
Unbekannte:
X;,Y;,Z;,
Xt, Y k•Zk: Koordinaten der Neupunkte im Landessystem (Besselellipsoid)
0;: Orientierungsunbekannte
o., ß, y. Drehwinkel der Transformation vom System WGS84 ins Landessystem (Besselellipsoid)
Maßstabsunbekannte
Als zusätzliche Unbekannte können eingeführt werden:
- ein oder mehrere Refraktionskoeffizienten - Additions- bzw. Multiplikationskonstanten für die elektronischen Entfer-
nungsmesser
Als Beobachtungen kommen in Betracht:
-Strecken -Azimute -Richtungen
642 Mitteilungsblan DYW-Baycrn 4/1996
-Zenitwinkel -ellipsoidische Höhenunterschiede und - Basisvektoren aus GPS-Messungen
Die erforderlichen Funktionen wurden z. B. angegeben von Hofmann-Wellenhof (GPS in der Praxis 1994). Da es sich natürlich um keine linearen Funktionen handelt, müssen diese noch linearisiert werden, d. h. man benötigt die Ableitungen der Funktionen nach den einzelnen Unbekannten. Auch diese Größen können z. B. bei Hofmann-Wellenhof nachgelesen werden.
Die Koordinaten der Festpunkte müssen natürlich vor der Ausgleichung über ellipsoidische Koordinaten in kartesische Koordinaten übergeführt werden, wozu streng genommen wieder die NN-Undulationen benötigt werden.
An der Fachhochschule München steht den Studierenden das Programm MOVE3 von Grontmij Geogroep zur Verfügung, das alle wesentlichen Schritte der Ausgleichung konsequent in ellipsoidischen Koordinaten B, L und h durchführt. Da das Programm für den internationalen Markt erstelitt wurde, ist dies sicherlich insofern von Vorteil, daß trotz unterschiedlicher Abbildungen zwischen Ellipsoid und Ebene (Transversale Mercatorprojektion [z. B. Österreich, Deutschland, Schweden und Großbritannien]. Konforme Lambertprojektion [z. B. Belgien, Dänemark, Frankreich und Spanien], Stereographische Projektion [z. B. Niederlande, Polen, Rumänien und Kanada]) der Linearisierungsprozeß stets identisch ist. Der Benutzer muß angeben, in welcher Projektion die Landeskoordinaten eingegeben werden und er erhält natürlich nach der Ausgleichung seine Ergebnisse wieder in der gleichen Projektion. Es müssen die Originalbeobachtungen ohne Anbringung von Reduktionen in das Programm eingegeben werden.
Es können folgende Beobachtungen kombiniert ausgeglichen werden:
-Horizontalstrecken -Schrägstrecken -Horizontalrichtungen -Azimute -Zenitwinkel -Höhenunterschiede - GPS-Basislinien (ilX, ßY, C..Z)
- GPS-Koordinaten (X, Y, Z)
Das Programm liefert neben den üblichen Genauigkeitsangaben auch Angaben zur inneren und äußeren Zuverlässigkeit der ausgeglichenen Netze.
Mineilungsblan DVW-Bayem 411996 643
Ausgleichung im System der Landeskoordinaten (GK-Koordinaten)
Die Ausgleichung im System der Landeskoordinaten (Rechtswert R, Hochwert H und cllipsoidische Höhe h) hat zunächst den Vorteil, daß die funktionalen Beziehungen zwischen den konventionellen Beobachtungen und den Unbekannten sehr wohl bekannt und in zahlreichen Programmen realisiert sind. Will man also ein herkömmliches Ausgleichungsprogramm für Lage- und Höhennetze zu einem Ausgleichungsprogramm ftir kombinierte terrestrische und Satellitenbeobachtungen erweitern, so müssen im wesentlichen lediglich die zusätzlichen Verbesserungsgleichungen flir die Komponenten AX, 6. Y, !il.. der Basisvektoren ergänzt werden. Außerdem muß die Zahl der Unbekannten um die vier Parameter a, ß, y und m einer räumlichen Transformation (die Translationen entfallen) erweitert werden.
Die nichtlinearen Beziehungen zwischen den Koordinatendifferenzen von Punkt P; 7.Um Punkt Px und den Unbekannten lauten allgemein:
AX;�;. = Fx (R;, H;, h;, Rk, H�;., h�;., a, ß, y, m);
6. Y il<. = Fy (R;, H;, h;. R�;., H�;.. h�;., a, ß, y, m);
6.Z;�;. = F,., (R;, H;, h;, Rk, Hk, hk, a, ß, y, m);
6.Xik, 11 Yik• l'il..;�;.: Koordinatendifferenzen im System WGS84 zwischen den Punkten P; und Pk
Die Funktionen müssen den Übergang von den Landeskoordinaten R, H, h über die kartesieben Koordinaten X, Y, Z des Bezugsellipsoids zu den kartesischen Koordinaten X, Y, Z des Systems WGS84 gewährleisten.
Für die Aufstellung der umgeformten Verbesserungsgleichungen werden die Ableitungen der Funktionen nach den Unbekannten benötigt. Bezüglich der Transformationsparameter können diese leicht angegeben werden, schwieriger wird es dagegen für die Koordinaten. Daher wurde vorgeschlagen, die Differemialquotienten nach den Landeskoordinaten durch numerische Differenzenquotienten (numerisches Differenzieren) zu ersetzen (Strauß, Walter Ll993]). Dabei werden, vereinfacht ausgedrückt, die Beträge berechnet, die durch eine Änderung der Landeskoordinaten um je einen Meter in den kanesischen Koordinaten X, Y, Z hervorgerufen werden. Diese Beträge werden dann als Koeffizienten der umgeformten Verbesserungsgleichungen eingesetzt.
Schnädclbach (AVN 10/1995) hat die Ausdrücke für die Differentialquoti· enten abgeleitet, was zur Klarheit des funktionalen Modells beiträgt.
644 Miueilungsblatt DVW-Bayem 411996

An der Fachhochschule München ist neben MOVE3 auch das Programm NETZ! R von Crcmer im Einsatz, das mit Ausnahme von beobachteten GPS-Koordinaten die gleichen Typen von Beobachtungen wie MOVE3 gemeinsam verarbeiten kann.
Das Programm arbeitet nach dem Lösungsvorschlag von Strauß und Walter.
Literaturverzeichnis
Denker, �1. A new Gravimetrie Quasig«>id for the federal Republie ofGermany DGK, Reihe B. Nr. 291, Milnchcn 1989
Heck, B. Rochenverfahren und Auswertemodelle der Landesvermessung Verlag Wichmann.Karlsruhe 1987
Hofmann-Wellenhof. B. u.a Global Positioning System. Theory and Practice Springer-Verlag. Wien New York, 3. Auflage 1994
Hofmann-Wellenhof, B. u.a GPS in der Praxis
Keller,W. u.a.
Schmin,G.u.a.
Schnädelbach,K
Schödlbaucr.A.
Strauss,R.u.WaltCT.H
Springer-Verlag, Wien; Ncw YorK, 1994
Dreidimensionale Netzausgleichung im lokalen Horizontsystem AVN l/l993.S. l3-28
Transformationsprobleme DVW-Mineilungen Badcn-Wi.lntemberg 1991. Sonderheft:GPSundlntcgralion vonGPS in bestehende geodätische Netze
Zur Ausgleichung von GPS-Beobachtungen im System ebenerkonformer Koordinaten AVN 10/1995, S. 369-373
Rechenformeln und Rechenbeispiele zur Landesvermessung Herbcrt Wichmann Verlag, Karlsruhe, 1981
Die Ausgleichung von GPS-Beobachtungen im System der Landeskoordinaten AVN 611993, S. 207-212
Mineilungsblan DVW-Bayem 411996 645

Anhang I: Fo.-meln
0 Berechnung von ka.-tesischen Koordinaten X, Y, Z aus ellipsoidi
schen Koordinaten B, L, h:
X- (N+h)·cos B·COS L; Y = (N-t-h)·cos B·sin l; Z • ((1-e2)-N-t-h}sin 8;
mit:
Querkrümmungshalbmesser:
Quadrat der 1. numerischen Exzentrizität: e2
= �a' ,
Sessel-Ellipsoid WGSB4-EIIipsoid 6 377 397.15508 m 6 378 137.00000 m
6 356 078.96290 m 6 356 752.31425 m
8 Be.-echnung von ellipsoidischen Koordinaten B, L, h aus kartesischen Koordinaten X, Y, Z (direkte Lösung nach Scherrer):
L = arctanf:
mit:
Quadrat der 2. numerischen Exzentrizität:
Hilfsgröße: 6=arctan�X22;�2
-b;
"2 a2 -b2 e = -b -, - ,
646 Mitteilungsblatt DVW-Bayern 4119%

e Berechnung von Gauß-Krüger Koordinaten R, H und der Meereshöhe HNN aus ellipsoidischen Koordinaten B, L, h und der NN
Undulation U
41: ellipsoidischelänge des Bezugsmeridians in Grad;
x = G + {2)x·h.L2 + [4),·l'!.l• + . . · y = { 1).,. ·l'!.l + [3).,.·6l3 + [5},.-l'!..l5 + ..
mit .ö.l im Bogenmaß.
R = lw/3·106 m + 500 000 m + y; H = x; HNN = h-U; �
Bedeutung der Koeffizienten:
G = Meridianbogenlänge zur ellipsoidischen Breite B
G = a·(B + ß·Sin(2·B) + y-sin(4·B) + 8-sin(6·B) + E·Sin{8·B) + ... );
{2}. = N·cos2B·tl2;
[1)y = N-cos B;
mit·
[4], = N-cos�B-t-(5- !2 + 9-112)124;
[3]y = N·COS3B·(1 - f + 112)/6;
Sessel-Ellipsoid WGS84-EIIipsoid t= tan B;
Miueilungsblau DVW-Bayem 4/1996
6 366 742.5203 m -2.511 274 56·10-3 2.62771·10-�
-3.42·10"; 5·10"12
6 367 449.1458 m
-2.518 827 92·10"3 2.64354·10"�
-3.45·10"9 5-10·12
647

0 Berechnung von 'ellipsoidischen Koordinaten B, L, h aus GaußKrüger Koordinaten R, H, der Meereshöhe Hr.'N und der NN-Undulation U
x = H: y = R (Kz·10�m + 500 000 m); Kz =Kennziffer des Rechtswerts R
L· LH .. [1JL.y+ [3Lr+ [5JL.I ..
Bedeutung der Koeffizienten:
[2]e =- 2_PN�
· tF -(1+ TJ�); [4Je = 24�N� -tF -(5 +3·1� + 6- T]r(1-t�));
[6]6 "'-72;_ N� · IF · (61+ 90-t� + 45-t�):
(3]l ;---, p-- -(1+2·t�+TJ�); 6 -NF -cosBF
(5)L • 120·N{cos8F ·(5 +28 -t�+24·1�);
mit: BF =Geographische Breite des Lotfußpunktes F; p = 18 0ht ; -J: = xlo.'; BF = (-J: + P'-sin(2-x') + y'-sin(4-x') + 6' -sin(6-x' ) + e'-sin(S·x'))·p;
Geographische Breite des Lotfußpunktes
u' ß'
648
Sessel-Ellipsoid 6 366 742.5203 m 2.511 273 24-10"3 3.678 79-10� 7.38-10"� 17-10·12
WGSB4-EIIipsoid 6 367 449.1458 m 2.518 826 58·10"3 3.700 95-10� 7.45 -10"9 17- 10-12
Miueilungsblan DVW-Bayern 4/1996

Anhang 2: Skizzen
Mittleres Erdellipsoid Konventionelles Ellipsoid
Beispiel: WGS84-EIIipsoid Beispiel: Sessel El l ipsoid
WGS84-EIIipsoid: Mittleres Erdellipsoid, das die Erde als Ganzes ersetzen soll Geoid-Undulationen weltweit < 100 m
Bessei-EIIipsoid: Konventionelles Ellipsoid, das ein begrenztes Gebiet der Geoidoberfläche ersetzen soll
Übergang zwischen WGS84-EIIipsoid und Sessel-Ellipsoid:
-über räumliche Ahnlichkeitstransformation mit mindestens drei identischen Punkten
-über räumliche Ahnlichkeitstransfonnation mit vorgegebenen Parametern
Näherungswerte für die Parameter: t, = -628 m; ty = -23 m ; t, = -445 m;
Startsystem: WGS84 System;
Miueilungsblau DVW-Bayern 4/1996
a. = +0_9"; ß = +0.2"; '! = -2.0"; m = -9 ppm;
Zielsystem: Landessystem (Bessel)
649
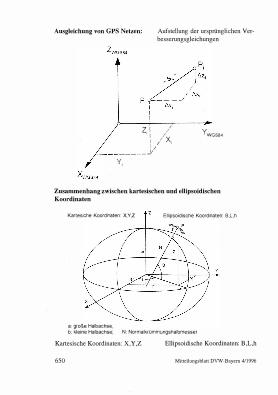
Ausgleichung von GPS Net'l.en: Aufstellung der ursprungliehen Verbesscrungsgleichungen
Y,
Z; i / 1 1/x, I ;
_ _y
YWGS84
Zusammenhang zwischen kartesischen und ellipsoidischen Koordinaten
Kartesiehe Koordinaten: X,Y,Z Ellipsoidische Koordinaten: B,L,h
a: große Halbachse: b: kleine Halbachse; N: Normalkrümmungshalbmesser
Kartesische Koordinaten: X,Y,Z Ellipsoidische Koordinaten: B,L,h
6 50 Mitteilungsbtau DVW-Bayem 411996





























