Embed Size (px)
Citation preview

ERT 452 - VIBRATION
Munira Bt Mohamed NazariSchool of Bioprocess, UniMAP 2012
1ERT 452

LECTURE 1:FUNDAMENTALS OF VIBRATION
2ERT 452

Topic Outline Introduction Basic Concepts of Vibration Classification of Vibration Vibration Analysis Procedure Spring Elements Mass or Inertia Elements Damping Elements Harmonic Motion Harmonic Analysis
ERT 452 3

INTRODUCTION
ERT 452 4

ERT 452 5
Brief History of VibrationBrief History of Vibration
Phenomenon of Vibration
Musical instrument (string)
Musical instrument (string)
Observed that if 2 string of different length are subject to the same tension, the shorter
one emits a higher note.
Observed that if 2 string of different length are subject to the same tension, the shorter
one emits a higher note.
Use monochordUse monochord
Frequency of vibration
Frequency of vibration
Pythagoras (582 - 507 BC)

Brief History of VibrationBrief History of Vibration(1564 – 1642) Galileo Galilei - Founder of modern experimental science.- Started experimenting on simple pendulum.- Study the behavior of a simple pendulum (observe pendulum movement of a lamp).- Describing resonance, frequency, length, tension and density of a vibrating stretched string.
(1642 – 1727) Sir Isaac Newton - Derive the equation of motion of a vibrating body.
6ERT 452

Brief History of VibrationBrief History of Vibration
(1902 – 1909) Frahm- Investigate the importance of torsional vibration study in the design of the propeller shafts of steamships.- Propose the dynamic vibration absorber, which involves the addition of a secondary spring-mass system to eliminate the vibration of main system.
7ERT 452

Importance of the Study of VibrationImportance of the Study of Vibration
Vibrations can lead to excessive deflections and failure on the machines and structures.
To reduce vibration through proper design of machines and their mountings.
To utilize profitably in several consumer and industrial applications.
To improve the efficiency of certain machining, casting, forging & welding processes.
To stimulate earthquakes for geological research and conduct studies in design of nuclear reactors.
8ERT 452
WHY???

Importance of the Study of VibrationImportance of the Study of Vibration
Vibrational problems of prime movers due to inherent unbalance in the engine.
Wheel of some locomotive rise more than centimeter off the track – high speeds – due to imbalance.
Turbines – vibration cause spectacular mechanical failure.
9ERT 452
EXAMPLE OF PROBLEMS

Importance of the Study of VibrationImportance of the Study of Vibration
Cause rapid wear.Create excessive noise. Leads to poor surface finish (eg: in metal cutting
process, vibration cause chatter).Resonance – natural frequency of vibration of a
machine/structure coincide with the frequency of the external excitation (eg: Tacoma Narrow Bridge – 1948)
10ERT 452
DISADVANTAGES

Applications
ERT 452 11

BASIC CONCEPTS OF VIBRATION
ERT 452 12

Basic Concepts of VibrationBasic Concepts of Vibration
Vibration = any motion that repeats itself after an interval of time. Vibratory System consists of:
1) spring or elasticity2) mass or inertia3) damper
Involves transfer of potential energy to kinetic energy and vice versa.
ERT 452 13

Basic Concepts of VibrationBasic Concepts of Vibration Degree of Freedom (d.o.f.) = min. no. of independent coordinates required to determine completely the positions of all parts of a system
at any instant of time Examples of single degree-of-freedom systems:
ERT 452 14

Basic Concepts of VibrationBasic Concepts of Vibration
Examples of single degree-of-freedom systems:
ERT 452 15

Basic Concepts of VibrationBasic Concepts of Vibration
Examples of Two degree-of-freedom systems:
ERT 452 16

Basic Concepts of VibrationBasic Concepts of Vibration
Examples of Three degree of freedom systems:
ERT 452 17

Basic Concepts of VibrationBasic Concepts of VibrationExample of Infinite number of degrees of freedom system:
Infinite number of degrees of freedom system are termed continuous or distributed systems.Finite number of degrees of freedom are termed discrete or lumped parameter systems.More accurate results obtained by increasing number of degrees of freedom.
ERT 452 18

CLASSIFICATION OF VIBRATION
ERT 452 19

20
Classification of VibrationClassification of Vibration
Free Vibration:A system is left to vibrate on its own after an initial disturbance and no external force acts on the system. E.g. simple pendulum
Forced Vibration:A system that is subjected to a repeating external force. E.g. oscillation arises from diesel enginesResonance occurs when the frequency of the external force coincides with one of the natural frequencies of the system

21
Undamped Vibration:When no energy is lost or dissipated in friction or other resistance during oscillations
Damped Vibration: When any energy is lost or dissipated in friction or other resistance during oscillations
Linear Vibration:When all basic components of a vibratory system, i.e. the spring, the mass and the damper behave linearly
Classification of VibrationClassification of Vibration

22
Nonlinear Vibration:If any of the components behave nonlinearly
Deterministic Vibration:If the value or magnitude of the excitation (force or motion) acting on a vibratory system is known at any given time
Nondeterministic or random Vibration: When the value of the excitation at a given time cannot be predicted
Classification of VibrationClassification of Vibration

23
Examples of deterministic and random excitation:
Classification of VibrationClassification of Vibration

VIBRATION ANALYSIS PROCEDURE
ERT 452 24

25
Vibration Analysis ProcedureVibration Analysis Procedure
Step 1: Mathematical Modeling
Step 2: Derivation of Governing Equations
Step 3: Solution of the Governing Equations
Step 4: Interpretation of the Results
Derive system/component
Free body diagram(FBD)Find the response
(solve problem method)Response (result):
Displacement, velocities & acceleration

26
Example of the modeling of a forging hammer:
Vibration Analysis ProcedureVibration Analysis Procedure

27
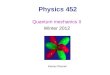
Example 1.1Example 1.1Mathematical Model of a MotorcycleMathematical Model of a Motorcycle
Figure below shows a motorcycle with a rider. Develop a sequence of three mathematical models of the system for investigating vibration in the vertical direction. Consider the elasticity of the tires, elasticity and damping of the struts (in the vertical direction), masses of the wheels, and elasticity, damping, and mass of the rider.

28
Example 1.1 Example 1.1 SolutionSolution
We start with the simplest model and refine it gradually. When the equivalent values of the mass, stiffness, and damping of the system are used, we obtain a single-degree of freedom model of the motorcycle with a rider as indicated in Fig.(b). In this model, the equivalent stiffness (keq) includes the stiffness of the tires, struts, and rider. The equivalent damping constant (ceq) includes the damping of the struts and the rider. The equivalent mass includes the mass of the wheels, vehicle body and the rider.

29
Example 1.1 Example 1.1 SolutionSolution

30
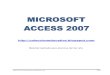
This model can be refined by representing the masses of wheels, elasticity of tires, and elasticity and damping of the struts separately, as shown in Fig.(c). In this model, the mass of the vehicle body (mv) and the mass of the rider (mr) are shown as a single mass, mv + mr. When the elasticity (as spring constant kr) and damping (as damping constant cr) of the rider are considered, the refined model shown in Fig.(d) can be obtained.
Example 1.1 Example 1.1 SolutionSolution

31
Example 1.1 Example 1.1 SolutionSolution

32
Note that the models shown in Figs.(b) to (d) are not unique. For example, by combining the spring constants of both tires, the masses of both wheels, and the spring and damping constants of both struts as single quantities, the model shown in Fig.(e) can be obtained instead of Fig.(c).
Example 1.1 Example 1.1 SolutionSolution

SPRING ELEMENTS
ERT 452 33

Linear spring is a type of mechanical link that is generally assumed to have negligible mass and damping. Spring force is given by:
34
1.1kxF
F = spring force,k = spring stiffness or spring constant,
andx = deformation (displacement of one end
with respect to the other)
Spring ElementsSpring Elements

35
Work done (U) in deforming a spring or the strain (potential) energy is given by:
When an incremental force ΔF is added to F:
2.121 2kxU
3.1...)(!2
1
)()(
)(
22
2
*
*
*
*
xdx
Fd
xdxdF
xF
xxFFF
x
x
Spring ElementsSpring Elements

36

37
Static deflection of a beam at the free end is given by:
Spring Constant is given by:
6.13
3
EIWl
st
W = mg is the weight of the mass m,E = Young’s Modulus, andI = moment of inertia of cross-section of beam
7.13
3l
EIWk
st
Spring ElementsSpring Elements

38
Combination of Springs:
1) Springs in parallel – if we have n spring constants k1, k2, …, kn in parallel, then the equivalent spring constant keq is:
11.121 ... neq kkkk
Spring ElementsSpring Elements

39
Combination of Springs:
2) Springs in series – if we have n spring constants k1, k2, …, kn in series, then the equivalent spring constant keq is:
17.11
...111
21 neqkkkk
Spring ElementsSpring Elements

40
Example 1.3Example 1.3Torsional Spring Constant of a Propeller ShaftTorsional Spring Constant of a Propeller Shaft
Determine the torsional spring constant of the speed propeller shaft shown in Fig. 1.25.

41
Example 1.3 Example 1.3 SolutionSolution
We need to consider the segments 12 and 23 of the shaft as springs in combination. From Fig. 1.25, the torque induced at any cross section of the shaft (such as AA or BB) can be seen to be equal to the torque applied at the propeller, T. Hence, the elasticities (springs) corresponding to the two segments 12 and 23 are to be considered as series springs. The spring constants of segments 12 and 23 of the shaft (kt12 and kt23) are given by:

42
Example 1.3 Example 1.3 SolutionSolution
m/rad-N109012.8
)3(32
)15.025.0()1080(
32
)(
6
449
23
4
23
4
23
23
23
23
l
dDG
l
GJk
t
m/rad-N105255.25
)2(32
)2.03.0()1080(
32
)(
6
449
12
4
12
4
12
12
12
12
l
dDG
l
GJk
t

43
Example 1.3 Example 1.3 SolutionSolution
Since the springs are in series, Eq. (1.16) gives
m/rad-N105997.6
)109012.8105255.25(
)109012.8)(105255.25(
6
66
66
2312
2312
tt
tt
t kk
kkk
eq

44
Example 1.5Example 1.5Equivalent Equivalent kk of a Crane of a Crane
The boom AB of crane is a uniform steel bar of length 10 m and x-section area of 2,500 mm2. A weight W is suspended while the crane is stationary. Steel cable CDEBF has x-sectional area of 100 mm2. Neglect effect of cable CDEB, find equivalent spring constant of system in the vertical direction.

A vertical displacement x of pt B will cause the spring k2 (boom) to deform by x2 = x cos 45º and the spring k1 (cable) to deform by an amount x1 = x cos (90º – θ). Length of cable FB, l1 is as shown.
45
m3055.12
426.151135cos)10)(3(2103
1
2221
l
l
Example 1.5 Example 1.5 SolutionSolution

46
Example 1.5 Example 1.5 SolutionSolution
The angle θ satisfies the relation:
The total potential energy (U):
0736.35,8184.0cos
10cos)3)((23 21
221
ll
1.E)]90cos([21
)45cos(21 2
22
1 xkxkU
N/m106822.10355.12
)10207)(10100( 696
1
111
lEA
k
N/m101750.510
)10207)(102500( 796
2
222
lEA
k

47
Example 1.5 Example 1.5 SolutionSolution
Potential Energy of the equivalent spring is:
By setting U = Ueq, hence:
2.E21 2xkU eqeq
N/m104304.26 6eq k

MASS OR INERTIA ELEMENTS
ERT 452 48

49
Using mathematical model to represent the actual vibrating system
E.g. In figure below, the mass and damping of the beam can be disregarded; the system can thus be modeled as a spring-mass system as shown.
Mass or Inertia ElementsMass or Inertia Elements

50
Combination of MassesE.g. Assume that the mass of
the frame is negligible compared to the masses of the floors. The masses of various floor levels represent the mass elements, and the elasticities of the vertical members denote the spring elements.
Mass or Inertia ElementsMass or Inertia Elements

51
Case 1: Translational Masses Connected by a Rigid Bar
Velocities of masses can be expressed as:
18.111
331
1
22 x
ll
xxll
x
Mass or Inertia ElementsMass or Inertia Elements

52
and,
By equating the kinetic energy of the system: 19.11xxeq
20.121
21
21
21 2
eqeq233
222
211 xmxmxmxm
21.13
2
1
32
2
1
21eq m
ll
mll
mm
Mass or Inertia ElementsMass or Inertia Elements

Case 2: Translational and Rotational Masses Coupled Together
53
meq = single equivalent translational mass = translational velocity = rotational velocityJ0 = mass moment of inertiaJeq = single equivalent rotational mass
x
Mass or Inertia ElementsMass or Inertia Elements

54
Case 2: Translational and Rotational Masses Coupled Together1. Equivalent translational mass:Kinetic energy of the two masses is given by:
Kinetic energy of the equivalent mass is given by:
22.121
21 2
02 JxmT
23.121 2
eqeqeq xmT
Mass or Inertia ElementsMass or Inertia Elements

55
Case 2: Translational and Rotational Masses Coupled Together
2. Equivalent rotational mass:Here, and , equating Teq and T gives eq Rx
25.1
21
21
21
20eq
20
22eq
mRJJor
JRmJ
24.120
eqR
Jmm
Since and , equating Teq & T gives R
x xx eq
Mass or Inertia ElementsMass or Inertia Elements

56
Example 1.7Example 1.7Cam-Follower MechanismCam-Follower Mechanism
A cam-follower mechanism is used to convert the rotary motion of a shaft into the oscillating or reciprocating motion of a valve.
The follower system consists of a pushrod of mass mp, a rocker arm of mass mr, and mass moment of inertia Jr about its C.G., a valve of mass mv, and a valve spring of negligible mass.
Find the equivalent mass (meq) of this cam-follower system by assuming the location of meq as (i) pt A and (ii) pt C.

ERT 452 57
Example 1.7Example 1.7Cam-Follower MechanismCam-Follower Mechanism

58
The kinetic energy of the system (T) is:
If meq denotes equivalent mass placed at pt A, with the kinetic energy equivalent mass system Teq is:
1.E21
21
21
21 2222
rrrrvvpp xmJxmxmT
xx eq
2.E21 2
eqeqeq xmT
Example 1.7Solution

59
By equating T and Teq, and note that
Similarly, if equivalent mass is located at point C, hence,
11
3
1
2 and,,,lx
llx
xllx
xxx rrvp
3.E21
23
21
22
21
eql
lm
l
lm
l
Jmm rv
rp
,eq vxx
4.E21
21 2
eq2eqeqeq vxmxmT
Example 1.7Solution

60
Equating (E.4) and (E.1) gives
5.E
2
21
23
2
2
122
eq
l
lm
ll
ml
Jmm rp
rv
Example 1.7Solution

DAMPING ELEMENTS
ERT 452 61

62
Damping ElementsDamping Elements
Viscous Damping: Damping force is proportional to the velocity of the vibrating body in a fluid medium such as air, water, gas, and oil.
Coulomb or Dry Friction Damping: Damping force is constant in magnitude but opposite in direction to that of the motion of the vibrating body between dry surfaces.
Material or Solid or Hysteretic Damping:Energy is absorbed or dissipated by material during deformation due to friction between internal planes.

63
Hysteresis loop for elastic materials:
Damping ElementsDamping Elements

Construction of Viscous Dampers
ERT 452 64
Damping ElementsDamping Elements
µ
Plate be moved with a velocity v in its own plane
Fixed planeVelocity of intermediate fluid layersare assumed to vary linearly

65
Shear Stress ( ) developed in the fluid layer at a distance y from the fixed plate is:
where du/dy = v/h is the velocity gradient.• Shear or Resisting Force (F) developed at the bottom
surface of the moving plate is:
where A is the surface area of the moving plate and is the damping constant.
26.1dydu
27.1cvhAv
AF
Damping ElementsDamping Elements
hA
c

66
If a damper is nonlinear, a linearization process is used about the operating velocity (v*) and the equivalent damping constant is:
29.1*vdv
dFc
Damping ElementsDamping Elements

67
Example 1.10Example 1.10Equivalent Spring and Damping Constants of a Machine Equivalent Spring and Damping Constants of a Machine
Tool SupportTool Support
A precision milling machine is supported on four shock mounts, as shown in Fig. 1.37(a). The elasticity and damping of each shock mount can be modeled as a spring and a viscous damper, as shown in Fig. 1.37(b). Find the equivalent spring constant, keq, and the equivalent damping constant, ceq, of the machine tool support in terms of the spring constants (ki) and damping constants (ci) of the mounts.

68
Example 1.10Example 1.10Equivalent Spring and Damping Constants of a Machine Equivalent Spring and Damping Constants of a Machine
Tool SupportTool Support

69
The free-body diagrams of the four springs and four dampers are shown in Fig. 1.37(c). Assuming that the center of mass, G, is located symmetrically with respect to the four springs and dampers, we notice that all the springs will be subjected to the same displacement, , and all the dampers will be subject to the same relative velocity , where and denote the displacement and velocity, respectively, of the center of mass, G. Hence the forces acting on the springs (Fsi) and the dampers (Fdi) can be expressed as
Example Example 1.10 Solution1.10 Solution
xxxx

70
Example Example 1.10 Solution1.10 Solution

71
Let the total forces acting on all the springs and all the dampers be Fs and Fd, respectively (see Fig. 1.37d). The force equilibrium equations can thus be expressed as
Example Example 1.10 Solution1.10 Solution
E.1)(4,3,2,1;
4,3,2,1;
ixcF
ixkF
idi
isi
E.2)(4321
4321
ddddd
sssss
FFFFF
FFFFF

72
Example Example 1.10 Solution1.10 Solution
E.3)(xcF
xkF
eqd
eqs
where Fs + Fd = W, with W denoting the total vertical force (including the inertia force) acting on the milling machine. From Fig. 1.37(d), we have
Equation (E.2) along with Eqs. (E.1) and (E.3), yield
E.4)(4
4
4321
4321
cccccc
kkkkkk
eq
eq
Parallel

73
where ki = k and ci = c for i = 1, 2, 3, 4.
Note: If the center of mass, G, is not located symmetrically with respect to the four springs and dampers, the ith spring experiences a displacement of and the ith damper experiences a velocity of where and can be related to the displacement and velocity of the center of mass of the milling machine, G. In such a case, Eqs. (E.1) and (E.4) need to be modified suitably.
Example Example 1.10 Solution1.10 Solution
xx
ix
ix
ix
ix

HARMONIC MOTION
ERT 452 74

Periodic Motion: motion repeated after equal intervals of timeHarmonic Motion: simplest type of periodic
motionDisplacement (x):
Velocity:
Acceleration:
75
30.1sinsin tAAx
31.1cos tAdtdx
32.1sin 222
2xtA
dt
xd
Harmonic MotionHarmonic Motion
(On horizontal axis)

76
• Scotch yoke mechanism:The similarity between cyclic (harmonic) and sinusoidal motion.
Harmonic MotionHarmonic Motion

77
Complex number representation of harmonic motion:
where i = √(–1) and a and b denote the real and imaginary x and y components of X, respectively.
35.1ibaX
Harmonic MotionHarmonic Motion

78
Also, Eqn. (1.36) can be expressed as
Thus,
43.1sincos
36.1sincos
iAeiAX
iAAX
47.12,1;)( 22 jbaA jjj
48.12,1;tan 1
j
a
b
j
jj
Harmonic MotionHarmonic Motion

79
Operations on Harmonic Functions:Rotating Vector, 51.1tiAeX
54.1cos]Re[ntDisplaceme tAAe ti
55.190cos
sin]Re[Velocity
tA
tAAei ti
56.1180cos
cos
]Re[onAccelerati
2
2
2
tA
tA
Ae ti
Harmonic MotionHarmonic Motion
Where Re denotes the real part.

80
• Displacement, velocity, and accelerations as rotating vectors
• Vectorial addition of harmonic functions
Harmonic MotionHarmonic Motion

81
Example 1.11Example 1.11Addition of Harmonic MotionsAddition of Harmonic Motions
E.1)()()()cos()(21
txtxtAtx
Find the sum of the two harmonic motions
).2cos(15)( and cos10)(21
ttxttx
Solution:
Method 1: By using trigonometric relations: Since the circular frequency is the same for both x1(t) and x2(t), we express the sum as

82
Example 1.11 SolutionExample 1.11 Solution
E.2)()2sinsin2cos(cos15cos10
)2cos(15cos10sinsincoscos
ttt
ttttA
E.3)()2sin15(sin
)2cos1510(cos)sin(sin)cos(cos
t
tAtAt
That is,
That is,
By equating the corresponding coefficients of cosωt and sinωt on both sides, we obtain
E.4)(1477.14
)2sin15(2cos1510
2sin15sin
2cos1510cos
22
A
A
A

83
Example 1.11 SolutionExample 1.11 Solution
E.5)(5963.74
2cos15102sin15
tan 1
and
Method 2: By using vectors: For an arbitrary value of ωt, the harmonic motions x1(t) and x2(t) can be denoted graphically as shown in Fig. 1.43. By adding them vectorially, the resultant vector x(t) can be found to be
E.6)()5963.74cos(1477.14)( ttx

84
Example 1.11 SolutionExample 1.11 Solution
E.7)(15ReRe)(
10ReRe)()2()2(
22
11
titi
titi
eeAtx
eeAtx
Method 3: By using complex number representation: the two harmonic motions can be denoted in terms of complex numbers:
The sum of x1(t) and x2(t) can be expressed as
E.8)(Re)( )( tiAetx
where A and α can be determined using Eqs. (1.47) and (1.48) as A = 14.1477 and α = 74.5963º

85
Definitions of Terminology:Amplitude (A) is the maximum displacement of a
vibrating body from its equilibrium position
Period of oscillation (T) is time taken to complete one cycle of motion
Frequency of oscillation (f) is the no. of cycles per unit time
59.12T
60.12
1
Tf
Harmonic MotionHarmonic Motion

86
Definitions of Terminology:Natural frequency is the frequency which a system oscillates
without external forces
Phase angle () is the angular difference between two synchronous harmonic motions
62.1sin
61.1sin
22
11
tAx
tAx
Harmonic MotionHarmonic Motion

87
Definitions of Terminology:Beats are formed when two harmonic motions, with
frequencies close to one another, are added
Harmonic MotionHarmonic Motion

88
Definitions of Terminology:Decibel is originally defined as a ratio of electric
powers. It is now often used as a notation of various quantities such as displacement, velocity, acceleration, pressure, and power
1.69)(log20dB
1.68)(log10dB
0
0
XX
PP
where P0 is some reference value of power and X0 is specified reference voltage.
Harmonic MotionHarmonic Motion

HARMONIC ANALYSIS
ERT 452 89

90
• A periodic function:
Harmonic AnalysisHarmonic Analysis

91
Harmonic AnalysisHarmonic Analysis
• Fourier Series Expansion: If x(t) is a periodic function with period , its Fourier Series representation is given by
1
0
21
21
0
)70.1()sincos(2
...2sinsin
...2coscos2
)(
n nntnbtna
a
tbtb
tataa
tx

92
•Gibbs Phenomenon: An anomalous behavior observed from a periodic function that is being represented by Fourier series.
As n increases, the approximation can be seen to improve everywhere except in the vicinity of the discontinuity, P. The error in amplitude remains at approximately 9 percent, even when . k
Harmonic AnalysisHarmonic Analysis

93
•Complex Fourier Series:The Fourier series can also be represented in terms of complex numbers.
)79.1(sincos
)78.1(sincos
tite
titeti
ti
Also,
)81.1(2
sin
)80.1(2
cos
i
eet
eet
titi
titi
and
Harmonic AnalysisHarmonic Analysis

94
•Frequency Spectrum:
Harmonics plotted as vertical lines on a diagram of amplitude (an and bn or dn and Φn) versus frequency (nω).
Harmonic AnalysisHarmonic Analysis

95
• Representation of a function in time and frequency domain:
Harmonic AnalysisHarmonic Analysis

96
• Even and odd functions:
1
0 )88.1(cos2
)(
)87.1()()(
n ntna
atx
txtx
Even function & its Fourier series expansion
Odd function & its Fourier series expansion
1)90.1(sin)(
)89.1()()(
n ntnbtx
txtx
Harmonic AnalysisHarmonic Analysis

97
• Half-Range Expansions:The function is extended to include the interval as shown in the figure. The Fourier series expansions of x1(t) and x2(t) are known as half-range expansions.
0 to
Harmonic AnalysisHarmonic Analysis

98
• Numerical Computation of Coefficients.If x(t) is not in a simple form, experimental determination of the amplitude of vibration and numerical integration procedure like the trapezoidal or Simpson’s rule is used to determine the coefficients an and bn. )99.1(
2sin
2
)98.1(2
cos2
)97.1(2
1
1
10
iN
i in
iN
i in
N
i i
tnx
Nb
tnx
Na
xN
a
Harmonic AnalysisHarmonic Analysis

99
Example 1.12Example 1.12Fourier Series ExpansionFourier Series Expansion
Determine the Fourier series expansion of the motion of the valve in the cam-follower system shown in the Figure.

100
Example 1.12Example 1.12SolutionSolution
E.1)()()(
)()(tan
1
2
21
tyl
ltx
ltx
lty
E.2)(0;)(
tt
Yty
If y(t) denotes the vertical motion of the pushrod, the motion of the valve, x(t), can be determined from the relation:
or
where
and the period is given by . 2

101
1
2
l
YlA
E.3)(0;)(
tt
Atx
By defining
x(t) can be expressed as
Equation (E.3) is shown in the Figure. To compute the Fourier coefficients an and bn, we use Eqs. (1.71) to (1.73):
E.4)(2
)(/2
0
2
/2
0
/2
00A
tAdt
tAdttxa
Example 1.12Example 1.12SolutionSolution

102
E.5)(.. 2, ,1,0
sincos
2cos
coscos)(
/2
0
22
/2
0
/2
0
/2
0
n
n
tnt
n
tnAdttnt
A
dttnt
Adttntxan
E.6)(.. 2, ,1,
cossin
2sin
sinsin)(
/2
0
22
/2
0
/2
0
/2
0
nn
A
n
tnt
n
tnAdttnt
A
dttnt
Adttntxbn
Example 1.12Example 1.12SolutionSolution

103
Therefore the Fourier series expansion of x(t) is
E.7)(...3sin3
12sin
2
1sin
2
...2sin2
2sin2
)(
tttA
tA
tAA
tx
The first three terms of the series are shown plotted in the figure. It can be seen that the approximation reaches the sawtooth shape even with a small number of terms.
Example 1.12Example 1.12SolutionSolution

ERT 452 104