Embed Size (px)
Citation preview
ERXA
for Luxottica 4 February 2008
ERXA’s
Main Experiences in Robotics
February 2010
Real Time/Embedded software Numerical Control Robotics Application Robotics CAM 3D Robotics Simulator Robotics plant scheduling, control and
monitoring
Main Experiences in Robotics

FASP: Real-Time environment
To control a wide mechanical
structure for bending large
metal sheet in naval field
In this project ERXA carried
out:
– Consulting and training
on VxWorks®
– system analysis
– drivers and control
systems development,
integration and data
collectionENEA

MACH-90: a Multi-Purpose Robot Control
ERXA was chosen as technical partner for design and
implementation of a new robot control
ERXA activities was dedicated to:
– programming environment
– moving strategies
– coordinate transformations
– machine supervision
– communication platforms
System based on a multi-micro architecture in VME
environment
PRIMA ELECTRONICS

RCS: Robertino Control System A large gantry structure with six
axes, each one moved by several synchronized motors. For heavy material handling developed for the ITER program
a special purpose robot control based on a multi-micro architecture in VXI environment and VxWorks
design and software implementation, for multi-axis moving strategies, coordinates transformation and robot supervision
– Portability
– Modularity and expandability
– Configurability
– Expansion capability
JRC - JOINT RESEARCH CENTRE, European Community,
Ispra site

RCS: Robertino Control System

GENERIS®: Generalized Software Control System for Industrial Robots
Software package, in multimicro /
multitasking environment,
devoted to control and manage
multi robot systems:
– Configurability for a wide range
of robot geometry and driving
systems;
– Portability on different hardware
platform
– Flexibility and modularity to
facilitate the integration of new
functions
JRC - JOINT RESEARCH CENTRE, European Community,
Ispra site

PHOENIX: general purpose Control System for Robots, Robotized Cells and
2D/3D Laser Cutting Machines Software characterized by:
– hardware portability
– openness to extensions
– multi-task
– multi-robot
– multi-language part-program
– integrated soft PLC (IsAGraf®)
– specific technologies
integration (i.e. laser cutting
management)
– based on Pentium architecture
– CPCI bus
– VxWorks® Operating SystemCREA - Amada Research Research
CenterCenter

AUTOCAL: Automatic Measuring Systems for Robotized Cell
Configuration
A specific software developed
for the automatic calibration of
spot welding robotized cell,
using digital sensor.
Starting from the theoretical
position of the cell elements, the
robot, using a measure sensor,
executes a set of measures for
the precise evaluation of the cell
element real positions.
COMAU BODY WELDING

BM-540-COMBI: Robotized and Integrated Work Cell for Cutting/Bending/Forming
New special machine,
completely automatic, for
small sizes sheet metal Robotized cell composed by a
cutting laser, a bending machine, a tools warehouse, two servo robot, a load/unload station.
Working operations as laser
cutting, metal sheet
manipulation, bending,
forming and storing, are
strictly integrated;
Completely controlled by
PHOENIX NC
CREA - Amada Research Research CenterCenter

• Different operations performed at the same time on different parts of the cell;
• Complete automatic programming of the different operations using specialized CAD/CAM.
ERXA activities:
– system analysis, project requirements and software design
– A specialized and innovative CAD/CAM environment
– Jobs scheduling and control software
BM-540-COMBI: Robotized and Integrated Work Cell for Cutting/Bending/Forming

Robotized Milling Work Cell for Shoes Last
Design and realization of an innovative CAD/CAM and cell control software for a robotized work cell devoted to mill shoes last.
Work cell composed by three robots:
– one dedicated to the spatial
measure of the shoes
– the other two to the milling
CAD/CAM software generate automatically the part–programs of all the robots and simulate the whole production process.
Application is completed with the cell management and production control software.
ARBO

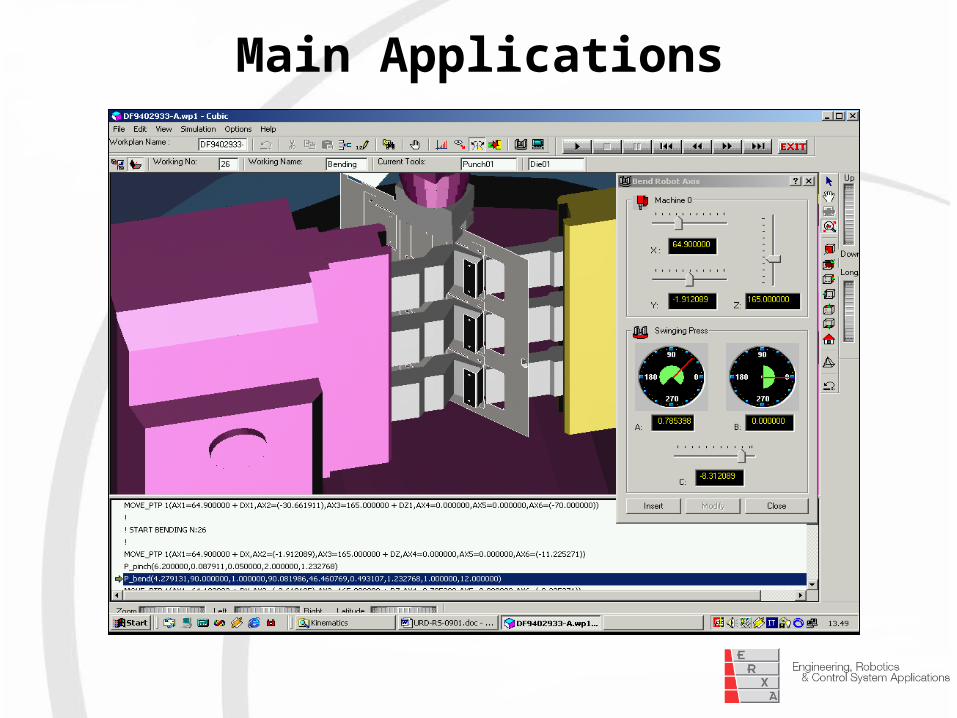
Main Applications

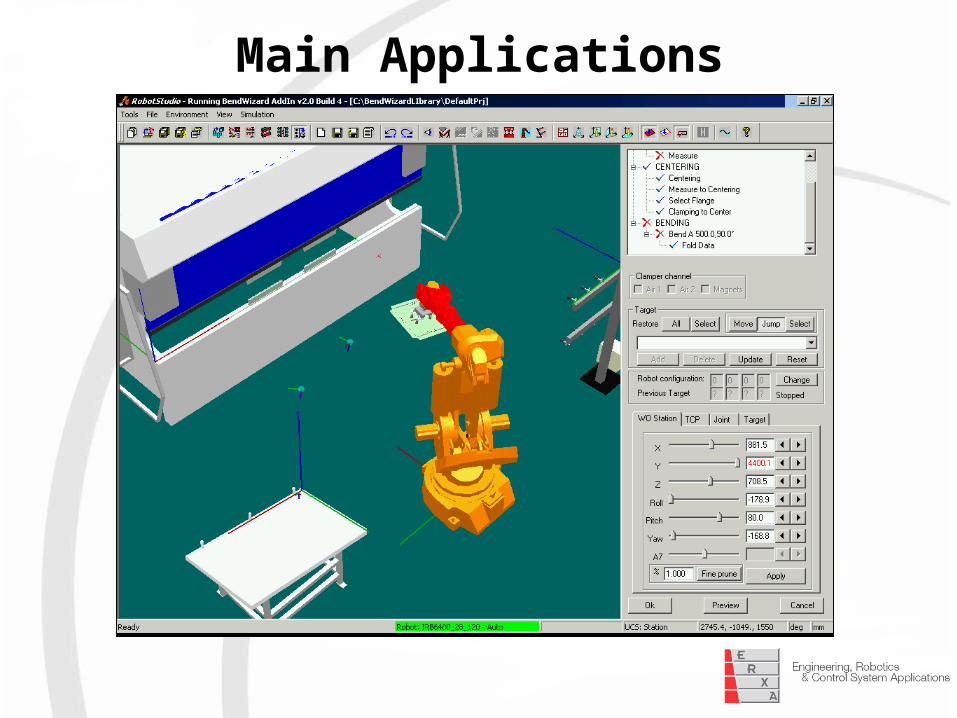
Main Applications

Main Applications

Main Applications
Main Applications

Main Applications

Main Applications

Main Applications
Main Applications

Main Applications

Main Applications

Main Applications

Main Applications
Main Applications





























