Embed Size (px)
Citation preview

ESCUELA POLITÉCNICA NACIONAL
FACULTAD DE INGENIERÍA ELÉCTRICA Y
ELECTRÓNICA
DISEÑO, SIMULACIÓN Y COMPARACIÓN DE CONTROLADORES
CLÁSICOS Y AVANZADOS, APLICADOS AL MODELO DE
GLUCOSA-INSULINA EN EL SISTEMA DE PÁNCREAS
ARTIFICIAL PARA PACIENTES CON DIABETES TIPO 1
TRABAJO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE
INGENIERO EN “ELECTRÓNICA Y CONTROL”
DAYAN JASMIN CALUPIÑA MOYA
ANDREA PATRICIA GARCÍA VÁSCONEZ
DIRECTOR: Ing. OSCAR EDUADO CAMACHO QUINTERO, PhD.
CODIRECTOR: Dr. Ing. JORGE ANDRÉS ROSALES ACOSTA
Quito, octubre de 2018
I
AVAL
Certificamos que el presente trabajo fue desarrollado por Dayan Jasmin Calupiña Moya y
Andrea Patricia García Vásconez bajo nuestra supervisión.
Ing. OSCAR EDUARDO CAMACHO QUINTERO Ph.D
DIRECTOR DEL TRABAJO DE TITULACIÓN
Dr. Ing. JORGE ANDRÉS ROSALES ACOSTA
CODIRECTOR DEL TRABAJO DE TITULACIÓN
II
DECLARACIÓN DE AUTORÍA
Nosotras, Dayan Jasmin Calupiña Moya y Andrea Patricia García Vásconez, declaramos
bajo juramento que el trabajo aquí descrito es de nuestra autoría; que no ha sido
previamente presentado para ningún grado o calificación profesional; y, que hemos
consultado las referencias bibliográficas que se incluyen en este documento.
A través de la presente declaración cedemos nuestros derechos de propiedad intelectual
correspondientes a este trabajo, a la Escuela Politécnica Nacional, según lo establecido
por la Ley de Propiedad Intelectual, por su Reglamento y por la normatividad institucional
vigente.
DAYAN JASMIN CALUPIÑA MOYA
ANDREA PATRICIA GARCÍA VÁSCONEZ

III
DEDICATORIA
A mi madre, Ximena, por su esmerada labor, apoyo incondicional, cariño, preocupación y
sobre todo por su amor.
A mi padre, Lenin, quien con su ejemplo de esfuerzo, perseverancia y responsabilidad ha
hecho de mí una mujer de bien, también por su amor y dedicada entrega.
A mi hermana, Vanessa, por el apoyo brindado a lo largo de mi carrera universitaria.
A toda mi familia, que, con sus palabras de aliento y consejos pusieron su grano de arena
para que esto sea posible.
Dayan.
IV
AGRADECIMIENTO
Agradezco a la Escuela Politécnica Nacional por abrir las puertas de su prestigiosa
institución para formarme como profesional.
A mi director y codirector, Óscar Camacho y Andrés Rosales, quienes brindaron su apoyo
incondicional en la realización de este proyecto, por sus consejos, el conocimiento que
lograron trasmitirme y sus palabras de aliento.
A mi compañera, gracias por estar conmigo en este último paso en la carrera, por tu
entusiasmo y paciencia.
A mis padres por el trabajo incansable que han realizado para brindarme todo lo necesario
y sobre todo la educación.
Gracias, a todos los compañeros y amigos que me acompañaron durante la carrera.
Dayan.

V
DEDICATORIA
A mis padres, Edwin y Fabricia, por su amor, apoyo, sacrificio y dedicación, a mis
hermanas, Karla y Adriana, por estar siempre para darme ánimo y cuando más lo necesito;
pero especialmente, dedico este trabajo a la memoria de mi abuelita, Clemencia, la persona
más importante de mi vida.
Andrea.
VI
AGRADECIMIENTO
Agradezco a la Escuela Politécnica Nacional, una gran institución, que me permitió
formarme académicamente y me acogió durante esta etapa.
A mi director y codirector, Óscar y Andrés, quienes supieron guiarme, capacitarme y
transmitir sus conocimientos, por ser unos grandes maestros.
A mi compañera de tesis, Dayan, que gracias a su esfuerzo, paciencia y colaboración
culmino esta etapa.
A la memoria de mi abuelita, Clemencia, sin su apoyo no estaría donde estoy ahora, por
su cariño y enseñanzas.
A mis padres, Edwin y Fabricia, que con su gran sacrificio y entrega, me incentivaron a
seguir adelante, a cumplir mis metas y esforzarme por alcanzar todo lo que me proponga.
A mis hermanas, Karla y Adriana, y a mi cuñado, Carlos, gracias por ser mi apoyo
incondicional y estar siempre cerca para ayudarme y brindarme todo su amor.
A mis amigos, por llenar de alegría mi vida.
Andrea.
VII
ÍNDICE DE CONTENIDO
AVAL ...................................................................................................................... I
DECLARACIÓN DE AUTORÍA.............................................................................. II
DEDICATORIA ..................................................................................................... III
AGRADECIMIENTO ............................................................................................ IV
ÍNDICE DE CONTENIDO.................................................................................... VII
RESUMEN ........................................................................................................... IX
ABSTRACT .......................................................................................................... X
1. INTRODUCCIÓN ............................................................................................. 1
1.1 Objetivos ................................................................................................................. 2
1.2 Alcance ................................................................................................................... 2
1.3 Marco teórico .......................................................................................................... 3
Insulina................................................................................................................................... 3
Niveles de glucosa ................................................................................................................ 5
Ciclo glucosa insulina ............................................................................................................ 5
Reservas de glucosa ......................................................................................................... 5
Reservas de insulina ......................................................................................................... 6
Glucogénesis ..................................................................................................................... 6
Glucogenólisis .................................................................................................................... 6
Diabetes mellitus ................................................................................................................... 7
Tipos de diabetes .................................................................................................................. 8
Diabetes mellitus tipo 1 ...................................................................................................... 8
Diabetes mellitus tipo 2 ...................................................................................................... 9
Diabetes mellitus gestacional ............................................................................................ 9
Otros tipos de diabetes ...................................................................................................... 9
Tratamiento de la diabetes mellitus tipo 1 ............................................................................ 9
Páncreas artificial ................................................................................................................ 10
Evolución del páncreas artificial ...................................................................................... 11
Sensores de glucosa ....................................................................................................... 12
Bombas de insulina.......................................................................................................... 13
Algoritmos de control ....................................................................................................... 14
Perturbaciones y retardos................................................................................................ 15
Modelo glucosa-insulina ...................................................................................................... 15
Absorción y acción de insulina ........................................................................................ 16
Dinámica de absorción de comida .................................................................................. 17
Concentración de glucosa ............................................................................................... 17
VIII
Modelo de orden reducido ................................................................................................... 18
Controladores ...................................................................................................................... 19
Controlador feedforward .................................................................................................. 20
Controlador tipo Proporcional Derivativo Integral PID .................................................... 21
Controlador tipo PID no lineal .......................................................................................... 21
Control por modos deslizantes dinámico ........................................................................ 23
Controlador de matriz dinámica ....................................................................................... 27
Índices de desempeño ........................................................................................................ 31
2. METODOLOGÍA ........................................................................................... 32
2.1 Obtención de los parámetros de la aproximación FOPDT .................................. 32
2.2 Diseño de controlador feedforward ...................................................................... 33
2.3 Diseño del controlador Tipo PID........................................................................... 34
2.4 Diseño de controlador Tipo PID no lineal ............................................................. 35
2.5 Diseño de controlador DSMC ............................................................................... 38
2.6 Diseño de controlador de matriz dinámica ........................................................... 40
2.7 Interfaz gráfica ...................................................................................................... 47
3. RESULTADOS Y DISCUSIÓN ...................................................................... 56
3.1 Parámetros nominales .......................................................................................... 59
Feedforward ......................................................................................................................... 59
PID ....................................................................................................................................... 60
NPID .................................................................................................................................... 61
DSMC .................................................................................................................................. 64
DMC ..................................................................................................................................... 66
3.2 Variaciones paramétricas ..................................................................................... 71
Interpaciente ........................................................................................................................ 72
Intrapaciente. ....................................................................................................................... 81
Escenarios ........................................................................................................................... 92
4. CONCLUSIONES .......................................................................................... 95
5. REFERENCIAS BIBLIOGRÁFICAS ............................................................. 97
6. ANEXOS ..................................................................................................... 102
ORDEN DE EMPASTADO ................................................................................ 114
IX
RESUMEN
La diabetes es una enfermedad crónica que se caracteriza por la existencia de niveles de
glucosa peligrosos para el paciente, generalmente demasiado altos que están dados por
la falta de producción de insulina. Sin embargo, se ha desarrollado un sistema conocido
como páncreas artificial, el cual se encarga de automatizar el proceso de inyección de
insulina, tomando esto en cuenta, el presente trabajo tiene como propósito el diseño de
algoritmos que permitan el control de la infusión de insulina en pacientes diabéticos Tipo
1, considerando principalmente los límites de glucosa en la sangre y la comparación entre
los controladores para determinar cuál se adapta mejor al sistema y proporciona los
mejores resultados.
De forma que se puedan realizar pruebas con simulaciones computacionales, en primer
lugar, se toma el modelo de glucosa- insulina de Hovorka [1], se obtiene su aproximación
de primer orden y después se realiza el diseño de los controladores propuestos. Estos son
PID, PID No Lineal y SMC Dinámico, a los cuales se les agrega un feedforward, y
finalmente, se realiza el diseño del controlador predictivo DMC.
Para este efecto, se realiza un estudio del sistema, de la enfermedad, del páncreas artificial,
del modelo y de los controladores para su posterior diseño y simulación frente a
perturbaciones lo que se realiza considerando una dieta nutritiva. A partir del índice del
error cuadrático integral, ISE se compara el desempeño de los controladores. Finalmente,
se desarrolla una interfaz gráfica para mayor facilidad de la presentación de resultados.
PALABRAS CLAVE: Diabetes Tipo 1, páncreas artificial, PID, PID No Lineal, DSMC, DMC,
MPC, variaciones paramétricas.

X
ABSTRACT
Diabetes is a chronic disease characterized by the existence of dangerous glucose levels
to the patient, usually too high because of the lack of insulin production, however, a system
known as artificial pancreas has been developed which automates the insulin injection
process, having this in mind, the purpose of this study is to design algorithms that allow the
control of insulin infusion in diabetic patients Type 1 considering mainly the limits of blood
glucose and also compare which of the controllers adapts better to the system and provides
the best results.
In order to tests can be performed, firstly, the Hovorka glucose-insulin model [1] is taken,
its first order approximation is obtained and then the proposed controllers are designed,
these are PID, Non-linear PID, Dynamic SMC to which a feedforward is added, and finally
the design of the DMC which is a predictive controller, is made.
For this purpose, a study of the system, the disease, the artificial pancreas, the model and
the controllers for its subsequent design and simulation with disturbances considering a
nutritious diet. From the Integral Square Error index, ISE, the controllers are compared.
Finally, a graphical interface is developed to facilitate the presentation of results.
KEYWORDS: Type 1 diabetes, artificial pancreas, PID, Nonlinear PID, DSMC, DMC, MPC,
parametric variations.

1
1. INTRODUCCIÓN
La Organización Mundial de la Salud ha nombrado a la diabetes como “la enfermedad del
futuro” [2]. La Diabetes Tipo 1 la padecen personas que no pueden producir insulina,
hormona encargada de regular la glucosa en la sangre. Quienes tienen esta enfermedad
están sometidos a un tratamiento basado en el suministro diario de insulina mediante
inyecciones para mantener la glucosa dentro de límites apropiados.[3]
La situación empeora al descubrir que la mitad de los pacientes que sufren de esta
enfermedad desconocen que la padecen. Muchas complicaciones agudas pueden venir
asociadas con la diabetes. Se presentan accidentes cardiovasculares o cerebrovasculares,
lesiones neurológicas, coma y riesgo vital, especialmente si la enfermedad se llega a
agravar [4].
En Ecuador, la diabetes es la segunda causa de muerte, después de las enfermedades
isquémicas del corazón [11].
Una forma efectiva de tratar esta enfermedad es mediante el uso de un páncreas artificial,
es decir, un sistema en lazo cerrado que regula el nivel de glucosa mediante la infusión
automática de insulina, para lo cual éste se forma por un sistema de medición de glucosa,
una bomba de insulina y el respectivo algoritmo de control. Este dispositivo se ha venido
desarrollando desde hace varios años, así que, en la actualidad existen dispositivos
comerciales que brindan la facilidad de automatizar la inyección de insulina, brindando una
alternativa al tratamiento habitual de la Diabetes Tipo 1 [5].
Para el diseño de controladores se utiliza un modelo matemático de relación glucosa-
insulina de quinto orden de Roman Hovorka [1]. Este modelo tiene como entrada la infusión
de insulina, la glucosa como salida y la ingesta de carbohidratos como perturbación. Se
debe considerar que este modelo representa una función metabólica del cuerpo humano,
por lo que existen variaciones dependiendo del paciente y de los cambios que éste pueda
tener a lo largo del día [6].
A partir del modelo se realiza el diseño de tres controladores con feedforward, PID, PID No
Lineal y SMC Dinámico, y un controlador predictivo DMC, y, además, para considerar los
cambios antes mencionados se realizan variaciones de los parámetros del modelo.

2
1.1 Objetivos
El objetivo general de este trabajo es: Diseñar y simular controladores clásicos y
avanzados, aplicados al modelo de glucosa-insulina en el sistema de páncreas artificial
para pacientes con diabetes tipo 1.
Los objetivos específicos de este proyecto son:
• Realizar un estudio de la Diabetes Tipo 1, el modelo de glucosa-insulina de
Hovorka [1], y los controladores tipo PID, tipo PID No Lineal, DSMC,
Feeedforward y DMC.
• Sintonizar y diseñar tres controladores con feedforward: un tipo PID, un tipo
PID No Lineal y un DSMC, y un controlador DMC.
• Simular el modelo glucosa-insulina de Hovorka [1] con los controladores
diseñados.
• Realizar una interfaz gráfica en donde se visualice los resultados de las
simulaciones.
• Comparar y analizar el desempeño de los controladores diseñados.
1.2 Alcance
• Se realizará el estudio bibliográfico de la Diabetes Tipo 1 en el ser humano para
conocer la problemática de esta enfermedad, sus riesgos, consecuencias y
tratamiento a través del uso de páncreas artificiales en la actualidad.
• Se estudiará el modelo matemático que describe la relación glucosa-insulina
que propone Roman Hovorka [1], para entender su comportamiento.
• Se realizará un estudio sobre los controladores tipo PID, tipo PID No Lineal,
Dinámico por Modo Deslizante (DSMC), Feeedforward y controlador de Matriz
Dinámica (DMC) para realizar el diseño de los mismos.
• Se sintonizará dos controladores: un tipo PID y un tipo PID No Lineal, utilizando
los parámetros del modelo de primer orden con retardo que se calcularán a
partir de la curva de reacción, a estos controladores se les agregará el diseño
de un controlador feedforward. Dichos controladores se aplicarán al modelo de
Hovorka [1].
• Se realizará el diseño de un controlador DSMC con feedforward utilizando los
parámetros del modelo de primer orden con retardo que se calcularán a partir
3
de la curva de reacción, además se diseñará un controlador DMC en base a la
respuesta escalón del sistema. Estos dos controladores se aplicarán en el
modelo de Hovorka [1].
• Se simularán los controladores antes mencionados, ante la ingesta de tres
comidas con un máximo de 60 carbohidratos por ración, lo que representa
perturbaciones en el modelo, usando el paquete computacional de Matlab.
• Se realizará una interfaz gráfica en donde se presente la respuesta de la planta
con cada controlador y la acción de control correspondiente, en el software de
Matlab.
• Se comparará el desempeño de los cuatro controladores diseñados en el
sistema con perturbaciones, y realizando variaciones en los parámetros del
modelo que corresponden a diferentes tipos de pacientes con Diabetes Tipo 1,
todo esto mediante el uso del ISE.
1.3 Marco teórico
En esta sección se presenta un estudio teórico sobre los conceptos de la regulación de la
glucosa – insulina en el cuerpo humano, la diabetes, el modelo matemático que se va a
utilizar y por otra parte los controladores a diseñar. Esta recopilación de información se la
realiza en base a artículos científicos, libros y publicaciones que tratan temas en el área de
la medicina, páncreas artificial, ingeniería y control.
Insulina
La insulina es una hormona secretada por el páncreas, específicamente por las células
beta de los islotes de Langerhans ubicados en este órgano. La función principal de la
insulina es regular la asimilación de carbohidratos, ayudando a metabolizar la glucosa, ya
sea para su transporte hacia las células de todo el cuerpo (músculos y tejido adiposo) o
para almacenarla en forma de glucógeno en el hígado [7].
En 1921, Fredrick Banting, Charles Best, J.J.R. Macleod y James Collip, científicos
canadienses, descubrieron que al aplicar en perros diabéticos la secreción de los islotes
de Langerhans de perros sanos, su condición de diabetes mejoraba. Ellos determinaron
que el responsable de esto es un péptido que, después de su purificación, lo llamarían
insulina [8]. Lo que significó un gran avance, ya que hasta ese entonces el hecho de
padecer diabetes era una condena de muerte, puesto que su tratamiento consistía
únicamente mantener dietas sin carbohidratos y de pocas calorías. Desde ese entonces
4
hasta la actualidad se han desarrollado diferentes tipos de insulina, provenientes de
diferentes fuentes y con diferentes tiempos de absorción [7].
La insulina puede provenir de diferentes fuentes, mismas que se mencionan a
continuación:
• Insulina Bovina y Porcina: Actualmente, estas dos insulinas difieren químicamente
a la insulina humana, siendo la insulina porcina la que más se asemeja. La pureza
de éstas se las considera aceptable, sin embargo, esta diferencia puede provocar
cambios en la acción farmacológica o alteraciones inmunológicas [9].
• Insulinas humanas: Pueden ser producidas mediante dos procesos de ingeniería
genética, el primero se logra aislando y clonando el gen humano encargado de la
síntesis de insulina e incorporándolo al genoma de la E. Coli (insulina humana
recombinante); y la segunda forma es modificando la composición de la insulina
Porcina (insulina humana sintética o semisintética). Estas insulinas son iguales a la
producida por el páncreas humano [9].
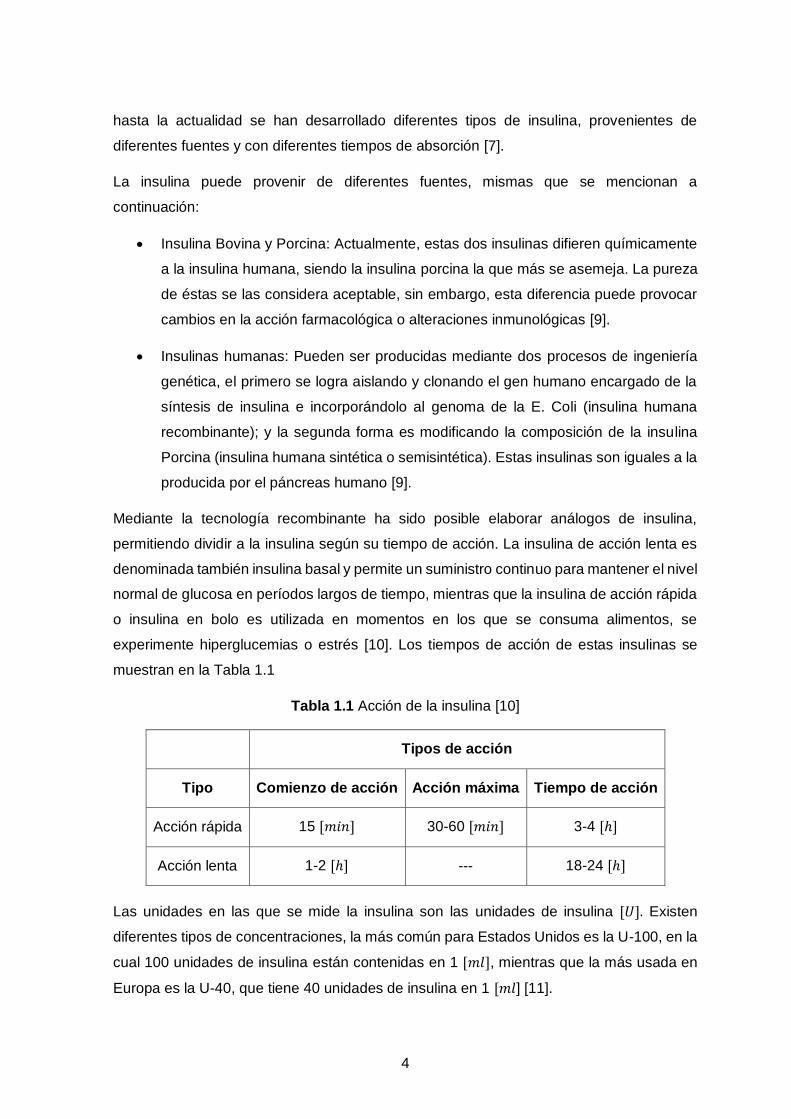
Mediante la tecnología recombinante ha sido posible elaborar análogos de insulina,
permitiendo dividir a la insulina según su tiempo de acción. La insulina de acción lenta es
denominada también insulina basal y permite un suministro continuo para mantener el nivel
normal de glucosa en períodos largos de tiempo, mientras que la insulina de acción rápida
o insulina en bolo es utilizada en momentos en los que se consuma alimentos, se
experimente hiperglucemias o estrés [10]. Los tiempos de acción de estas insulinas se
muestran en la Tabla 1.1
Tabla 1.1 Acción de la insulina [10]
Tipos de acción
Tipo Comienzo de acción Acción máxima Tiempo de acción
Acción rápida 15 [𝑚𝑖𝑛] 30-60 [𝑚𝑖𝑛] 3-4 [ℎ]
Acción lenta 1-2 [ℎ] --- 18-24 [ℎ]
Las unidades en las que se mide la insulina son las unidades de insulina [𝑈]. Existen
diferentes tipos de concentraciones, la más común para Estados Unidos es la U-100, en la
cual 100 unidades de insulina están contenidas en 1 [𝑚𝑙], mientras que la más usada en
Europa es la U-40, que tiene 40 unidades de insulina en 1 [𝑚𝑙] [11].
5
Niveles de glucosa
La glucosa se encuentra presente en la sangre en una determinada concentración, esto es
conocido como glucemia y sus unidades son [𝑚𝑔/𝑑𝑙] o [𝑚𝑚𝑜𝑙/𝑙]. Los diferentes niveles
de concentración en los que se encuentre se los denomina de la siguiente manera:
• Normoglucemia: Nivel de glucosa dentro de 70 y 120 [𝑚𝑔/𝑑𝑙] [7]. Este nivel puede
elevarse hasta 180 [𝑚𝑔/𝑑𝑙] después de haber consumido alimentos, pero regresa
a su nivel después de 1 o 2 horas [12].
• Hipoglucemia leve: Se caracteriza por niveles de glucosa por debajo de 70 [𝑚𝑔/𝑑𝑙]
[13].
• Hipoglucemia moderada: Se consideran niveles de glucosa menores a 55 [𝑚𝑔/𝑑𝑙]
[13].
• Hipoglucemia severa: El nivel de glucosa está debajo de 40 [𝑚𝑔/𝑑𝑙][13].
• Hiperglucemia: Este es un cuadro que se presenta cuando el paciente posee límites
de glucosa superiores a 180 [𝑚𝑔/𝑑𝑙] [4].
Ciclo glucosa insulina
Los carbohidratos son la fuente principal de energía de los tejidos en el ser humano.
Después de la alimentación, existe un incremento de glucosa en el torrente sanguíneo, en
respuesta a esto, el páncreas secreta insulina, que es la hormona encargada de la
regulación del excedente de glucosa, ya que permite su almacenamiento en el hígado y en
los músculos. Por el contrario, en estado de ayuno los niveles de glucemia bajan, y para
regular esta deficiencia de glucosa en la sangre, el mismo páncreas secreta una hormona
llamada glucagón [3].
De lo expuesto, se entiende que la insulina y su hormona opuesta, el glucagón, se encargan
de la regulación de la glucosa en el torrente sanguíneo a través de procesos bioquímicos
que se explicarán a continuación.
Reservas de glucosa
Después de la digestión los carbohidratos se convierten en glúcidos que son absorbidos
en forma de glucosa, fructosa, manosa y galactosa, éstos se almacenan en el hígado en
forma de polisacárido llamado glucógeno. El tejido muscular también almacena glucógeno
para luego ser usado por el cuerpo en forma de energía [14] . Aproximadamente del 1 al
5% del peso del hígado está constituido por glucógeno, y los músculos tienen una reserva
6
de 0.2 al 1 % de su peso. Sin embargo, en total los músculos almacenan una cantidad
mayor de glucógeno [14].
La síntesis y degradación de glucosa representan procesos claves en la regulación de
glucosa en la sangre, y en el control de las necesidades energéticas del organismo. Estos
procesos bioquímicos son activados por hormonas secretadas por el páncreas [15].
Reservas de insulina
El páncreas para cumplir su función endócrina tiene una región conocida como los islotes
de Langerhans que se encargan de la secreción de hormonas; existen aproximadamente
un millón de islotes en los que se diferencian cuatro tipos de células [8]:
• Células alfa: Encargadas de producir glucagón.
• Células beta: Funcionan como un sensor de glucosa y energía, y además se
encargan de la secreción de insulina.
• Células D: Secretan somatostatina pancreática.
• Células PP: Producen polipéptido pancreático.
La insulina controla el almacenamiento y liberación de energía en los periodos de ayuno y
alimentación [16].
Glucogénesis
Es la síntesis del glucógeno, es decir es un proceso en el que glucosa que se encuentra
en la sangre se almacena en el hígado y los músculos en forma de glucógeno, y este
proceso se activa por medio de la insulina secretada por el páncreas [16].
La insulina es la encargada de llevar la glucosa a las células insulino dependientes. La
acción biológica de la insulina inicia cuando interacciona con receptores de insulina que se
encuentran en la superficie de la célula, lo que desencadena una cascada de señalización
de interacciones proteicas, esto permite la entrada de la glucosa a las células, y normaliza
los niveles en la sangre [16].
Glucogenólisis
Es la degradación de glucógeno que se encuentra almacenado en el hígado y los
músculos, aumentando el nivel de glucosa, este proceso es activado por medio la hormona
pancreática glucagón.
Por otro lado, en respuesta al estrés emocional, la médula suprarrenal libera epinefrina o
adrenalina que estimula la glucogenólisis e inhibe la glucogénesis, lo que causa una

7
producción masiva de glucosa proporcionando energía para mantener la situación bajo
control [15].
Diabetes mellitus
La Diabetes Mellitus es una enfermedad no curable caracterizada por la presencia de una
alteración global del metabolismo, en la que el nivel de glucosa en la sangre es demasiado
alto. En el torrente sanguíneo normalmente hay cierta concentración de glucosa, ya que
sirve como fuente de energía, pero si se encuentra en exceso, es perjudicial para la salud.
En una persona saludable debe mantenerse dentro de normoglucemia [12].
En general, las personas con antecedentes de familiares con diabetes están más
predispuestas a sufrir de esta enfermedad. Los pacientes que la padecen muestran
episodios de hiperglucemia, que si llegaran a agravarse puede causar alteraciones en el
metabolismo de lípidos, proteínas y electrolitos [9]. Algunas de las causas para que un
individuo afectado no pueda mantener su glucemia en los valores adecuados son: defectos
en la secreción de insulina, disminución o resistencia de los receptores de insulina [3].
Según estimaciones, desde el 2000 hasta el 2030 el número de pacientes con diabetes se
habrá duplicado [2]. De igual manera, una persona diabética producirá un gasto sanitario
equivalente a dos veces el gasto sanitario de una persona sin esta enfermedad [7]. En
Ecuador, desde el 2007 hasta el 2016, la cifra de fallecidos a causa de esta enfermedad
se ha incrementado en un 51%, siendo las mujeres las más afectadas. Estas cifras se
deben a que los ecuatorianos llevan vidas sedentarias y una mala alimentación [17].
Si se aplica un tratamiento adecuado la expectativa de vida de pacientes con diabetes
tiende a ser la de una persona sana, ya que se tiene bajo control la enfermedad; en
contraparte, si no se maneja de manera adecuada o se carece de una terapia para esta
enfermedad, no solo la calidad de vida empeora, sino que el tiempo de vida medio también
se ve reducido [9].
La falta de insulina en los diferentes órganos como hígado, músculo y tejido adiposo es lo
que causa los diferentes síntomas clínicos de la diabetes. Se produce aumento en la
producción hepática de glucosa y disminución de su consumo por los órganos antes
mencionados; es así como la glucosa no puede ser metabolizada por las células y de esta
manera se presenta la hiperglucemia. Es aquí donde aparecen los síntomas más
característicos de la enfermedad: polifagia (exceso de apetito), poliuria (producción y
excreción de gran cantidad de orina) y polidipsia (incremento de sed) y cansancio [11].
8
De igual manera, se pueden llegar a comprometer muchos órganos del paciente, a largo
plazo, si persisten los cuadros de hiperglucemia [18]. Los ojos, riñones, nervios, corazón y
vasos sanguíneos son los que más se ven afectados presentando disfunción y fallo [19].
Cabe recalcar que cuando se inician tratamientos con insulina es posible que también se
presenten complicaciones en caso de que se suministren dosis de manera incorrecta,
haciendo que la glucosa baje más de lo necesario, provocando hipoglucemia leve,
moderada o severa [13]. El cuerpo humano reacciona intentando utilizar las reservas de
glucógeno hepático, y el cerebro, al ser el órgano que más consume energía (que proviene
de la glucosa), será uno de los más afectados [11]. Los principales síntomas de la
hipoglucemia leve son temblores, hambre y transpiración; de la hipoglucemia moderada
son visión borrosa, ansiedad, somnolencia y descoordinación motora; y de la hipoglucemia
severa son convulsiones y coma [13].
Tipos de diabetes
Diagnosticar a un paciente con un determinado tipo de diabetes no resulta fácil, ya que
dependerá de diferentes factores como la precocidad y circunstancias en las que se haya
realizado el diagnóstico, la intensidad de la hiperglucemia o la presencia o no de otras
enfermedades en el paciente [20].
La ciencia ha logrado clasificar diferentes tipos de diabetes, los cuales pueden dividirse en
cuatro grandes grupos: Diabetes Mellitus Tipo 1, Diabetes Mellitus Tipo 2, Diabetes Mellitus
Gestacional y otros tipos de Diabetes [20].
Diabetes mellitus tipo 1
Constituye del 15% a 20% de los casos de Diabetes Mellitus. Aparece alrededor de los 11
y 13 años de edad, es decir, en la infancia o adolescencia [9]. A pesar de esto, hay la
posibilidad de que se manifieste a cualquier edad [11].
En este caso el páncreas sufre una destrucción de las células beta debido a mecanismos
autoinmunes, haciendo que sus funciones desaparezcan, es decir que la producción de
insulina sea prácticamente nula; ante esto se presentan cuadros de hiperglucemia después
de haber consumido hidratos de carbono [3].
Este tipo de diabetes, como en gran parte de enfermedades autoinmunes, se produce
debido a factores ambientales, como infecciones virales, y factores genéticos-hereditarios
[20].
9
Diabetes mellitus tipo 2
La mayor cantidad de casos de este tipo de diabetes se da en personas mayores a los 40
años. En la actualidad se sabe que cada vez son más comunes los casos de esta
enfermedad en la población joven [20].
La Diabetes Mellitus Tipo 2 se caracteriza por la resistencia a la insulina [11]. Los niveles
de glucosa, durante algunos años, pueden mantenerse normales dado que el paciente
produce más insulina en respuesta a la resistencia de insulina, lo que provoca que la
función de las células beta se deteriore y dejen de producir insulina [21].
Este padecimiento no sólo depende de componentes genéticos sino también ambientales,
como la mala alimentación y falta de ejercicio [20].
Diabetes mellitus gestacional
La Diabetes Mellitus Gestacional es un cuadro clínico de intolerancia a la glucosa que se
hace presente en el embarazo, aproximadamente entre el segundo o tercer trimestre de
gestación, y que puede afectar tanto a la madre como al feto [9]. Esto se debe a que,
durante el embarazo, se producen hormonas en la placenta, algunas de las cuales pueden
provocar efectos bloqueadores de la insulina [11].
Otros tipos de diabetes
En este grupo se concentran diferentes tipos de diabetes que no caen en la descripción de
cualquiera de los otros cuadros mencionados anteriormente. Entre éstos se encuentran
casos específicos de diabetes relacionados a defectos genéticos en la acción de la insulina,
enfermedades del páncreas, endocrinopatías, infecciones, acción de fármacos o formas
infrecuentes de diabetes autoinmunes [20].
Tratamiento de la diabetes mellitus tipo 1
El objetivo de control en los pacientes con diabetes es mantener el nivel de glucosa en la
sangre dentro de los rangos recomendados.
En general, para cualquier tipo de diabetes, se puede incluir tratamientos farmacológicos y
no farmacológicos. En las medidas farmacológicas se realizan los tratamientos a base de
insulina o conocida también como insulinoterapia; por otro lado, en el tratamiento no
farmacológico se puede mencionar el control en la nutrición del paciente y realización de
ejercicio físico [9].

10
Hablando específicamente de la Diabetes Tipo 1, la insulinoterapia es muy efectiva, ya que,
como se mencionó anteriormente, esta enfermedad se debe a la falta de insulina [10]. El
objetivo de este tratamiento es mantener la normoglucemia del paciente, evitar
complicaciones crónicas y agudas, prevenir posibles enfermedades que desencadene la
diabetes, y de esta manera mantener un estilo de vida normal del paciente [10].
Existen dos métodos para la administración de insulina en el individuo con Diabetes Tipo
1. El primero se denomina Multiple Daily Injections (MDI) que consiste en suministrar la
insulina mediante inyecciones periódicas a lo largo del día dependiendo de la glucemia y
del consumo de hidratos de carbono. El segundo es llamado Continuous Subcutaneous
Insulin Infusion (CSII), este método intenta semejar el funcionamiento de un páncreas
humano mediante la utilización de una bomba infusión continua de insulina [7].
Para el caso del MDI se utiliza una combinación entre 1 a 3 dosis de insulina de acción
lenta en un día, para que se mantenga el nivel basal, y se agrega dosis de insulina de
acción rápida antes de las comidas para compensar el consumo de hidratos de carbono
[10]. En cuanto al CSII, dado que el suministro es continuo, se utiliza solamente insulina de
acción rápida [7].
Páncreas artificial
Se conoce al páncreas artificial como un lazo cerrado de control en el que se automatiza
el suministro de insulina en base a la respuesta de los niveles de glucosa en la sangre del
paciente, es decir como un páncreas sano [22]. Es un dispositivo que combina un sistema
de monitoreo en tiempo real de la glucosa (sensor), una bomba de insulina (actuador) y un
algoritmo de control para trabajar de forma simultánea, con el objetivo de regular los niveles
de glucosa e insulina en el torrente sanguíneo, en la
Figura 1.1 se observa los componentes del sistema de páncreas artificial.
BOMBA DE
INSULINA
ALGORITMO DE
CONTROL
SISTEMA DE
MONITOREO DE
GLUCOSA
GLUCOSA EN
LA SANGREINSULINA
RÁPIDAACTUADORCONTROLADOR
SENSOR
+ --
SETPOINT
Figura 1.1 Elementos del páncreas artificial
11
Evolución del páncreas artificial
Según [6], el desarrollo del páncreas artificial empieza con los estudios de Kadish en 1964
quien propone un sistema de lazo cerrado basado en un algoritmo de control on - off, un
sensor intravenoso continuo de glucosa y la infusión de insulina, permitiendo la regulación
de glucosa en individuos con Diabetes Tipo 1. Después de este estudio se siguen haciendo
investigaciones, hasta que en 1977 se obtiene el primer dispositivo que se comercializó,
llamado Biostator que fue un instrumento diseñado para tratar trastornos metabólicos
agudos, y luego se comercializó el controlador de glucosa en la sangre Nikkiso STG-22
que fue utilizado en Japón, sin embargo, estos dispositivos eran de uso médico, es decir
en hospitales, pero su invención abrió la puerta para que se desarrolle un dispositivo portátil
externo de control de la glucosa.
El control en lazo cerrado de la glucosa se presenta como una solución para el tratamiento
de la Diabetes Tipo 1, ya que disminuye el número de hiperglucemias y permite al paciente
despreocuparse de las inyecciones programadas por el médico [7].
En 1982, después de que se descubriera que la entrega de insulina podía hacerse
directamente debajo de la piel y ya no por vía intravenosa, se prueba un prototipo de un
páncreas artificial portable. Los siguientes dispositivos que se desarrollaron a finales de los
80´s fueron sistemas que utilizaban sensores de glucosa por vía intravenosa y la infusión
de la insulina era vía intraperitoneal (zona que contiene los órganos abdominales) [6].
La empresa Minimed (Medtronic), en 1999, introduce un dispositivo de páncreas artificial
subcutáneo en el que se incluye un sistema de monitoreo de glucosa y una bomba que
permite la entrega de insulina, sensor y actuador respectivamente, que trabajan de forma
subcutánea, lo que significa un instrumento totalmente automático y portátil [22].
En el desarrollo de esta tecnología fue un hecho muy importante que se empezaran a
realizar prácticas con sistemas de control en lazo cerrado en animales para el tratamiento
de la Diabetes Tipo 1 mediante simuladores, y que, en 2006, la Juvenile Diabetes Research
Foundation proponga el Artificial Pancreas Project en el que universidades, centros de
investigación de Estados Unidos y la Universidad Cambridge de Europa crearon un
consorcio para maximizar la investigación en este ámbito.
El páncreas artificial se ha convertido en un tema con un gran impacto nivel social y
económico [7].
En la actualidad, se estima que más de 200 000 pacientes con diabetes en el mundo utilizan
una bomba de insulina para el tratamiento de la diabetes. Los pacientes se muestran
12
entusiastas con el sistema ya que no sólo pueden tener mejor control de su enfermedad,
sino que les brinda una mejor calidad de vida [23].
Sensores de glucosa
En el siglo XIX, el diagnóstico de la diabetes se realizaba a través de la catación de la orina
del paciente y posteriormente con pruebas químicas, sin embargo, la glucosa empieza a
aparecer en la orina cuando la concentración de la sangre es mayor a 180 [𝑚𝑔/𝑑𝑙], que es
un nivel muy alto. La detección en este caso se da mucho tiempo después de que la
glucosa haya tomado dicho valor, es decir que para cuando obtuvo el valor de la glucosa
éste ya pudo haber variado.
A principios del siglo XX se empiezan a realizar pruebas para medir la glucosa en la sangre
y en 1964 se comercializa el primer producto que permite medir la glucosa a partir de
colorimetría. Trece años después aparece el dispositivo conocido como Accu-Check, que
utiliza tiras de colorimetría para la medición. En la actualidad estos sensores son de uso
habitual para pacientes con diabetes. En 1999 MiniMed lanzó al mercado un dispositivo de
medición de glucosa llamado Continuous Glucose Measurement System (CGMS) que toma
las medidas cada cinco minutos.
Los medidores continuos de glucosa están aprobados siempre que sean usados junto con
las tiras reactivas, ya que presentan problemas de exactitud [7].
Los dispositivos que en la actualidad se comercializan miden la glucosa intersticial, es
decir, la concentración de glucosa en el líquido contenido entre las células (líquido
intersticial). Realizan esta medición a partir de la corriente eléctrica en un electrodo que
varía por la oxidación de la glucosa en presencia de una enzima llamada glucosa-oxidasa
(GOx), ya que esta corriente corresponde a la glucosa intersticial se utilizan algoritmos de
estimación para obtener la medición de glucosa en el plasma sanguíneo. La estimación
genera un retardo al sistema de lazo cerrado que se considera entre los 5 y 15 minutos,
sin embargo, se conoce que puede tener mucha variabilidad. En la Figura 1.2 se muestra
una representación del sensor de glucosa y su ubicación en el organismo.

13
Vaso sanguíneo
Glucosa
Plasma Fluido Intersticial
Sensor
Células
musculares o
de grasa
Figura 1.2 Representación del sensor de glucosa [24]
Entre los sensores de glucosa en tiempo real que se encuentran en el mercado y que han
sido aprobados por Food and Drug Administration (FDA) se tiene DExCom SEVEN de
Dexcom, el Guardian Paradigm Real Time de Medtronic y el Free Style Navigator de Abbott
[25].
Bombas de insulina
Las bombas desarrolladas recientemente tienen características que brindan facilidad de
uso al paciente, tienen más funciones y son muy pequeñas, lo que permite que puedan
llevarse a cualquier lugar incluso en ambientes húmedos o con agua. La bomba de insulina
Omnipod es una bomba que elimina el uso del catéter y la entrega de insulina se da
directamente a la piel [7]. Se puede observar en la Figura 1.3, la bomba junto con el sensor
de glucosa cuyo funcionamiento depende del algoritmo de control implementado.
SENSOR DE GLUCOSA
BOMBA DE INSULINA
Algoritmo de Control
Figura 1.3 Control lazo cerrado para páncreas artificial [25]
Las bombas actuales tienen funciones como la conexión a un dispositivo remoto donde se
puede programar el cálculo de bolus, que obtiene la dosis de insulina a partir del valor de
glucosa, los carbohidratos consumidos, y otros factores [7]. Una característica que brinda
seguridad al paciente es que las bombas pueden ser configuradas de tal manera que
cuando la glucosa está en un nivel bajo, hipoglucemia, se activa el modo ‘low glucose
14
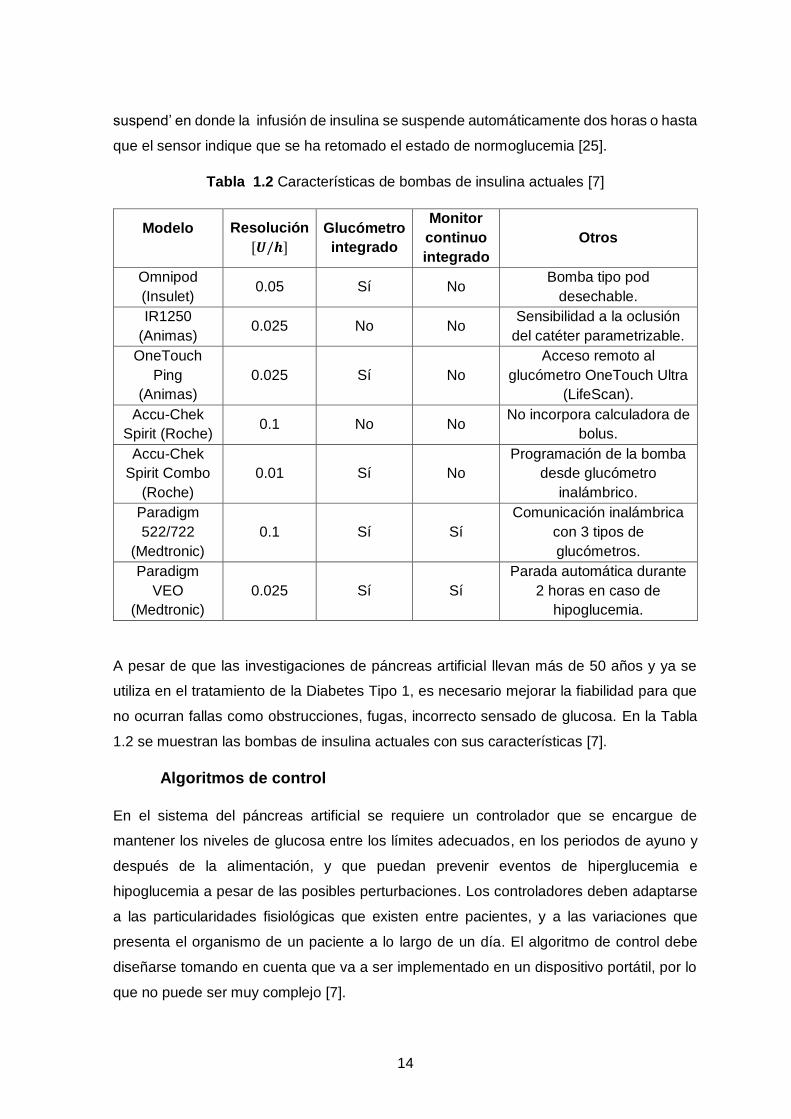
suspend’ en donde la infusión de insulina se suspende automáticamente dos horas o hasta
que el sensor indique que se ha retomado el estado de normoglucemia [25].
Tabla 1.2 Características de bombas de insulina actuales [7]
Modelo
Resolución
[𝑼/𝒉]
Glucómetro
integrado
Monitor
continuo
integrado
Otros
Omnipod
(Insulet) 0.05 Sí No
Bomba tipo pod
desechable.
IR1250
(Animas) 0.025 No No
Sensibilidad a la oclusión
del catéter parametrizable.
OneTouch
Ping
(Animas)
0.025 Sí No
Acceso remoto al
glucómetro OneTouch Ultra
(LifeScan).
Accu-Chek
Spirit (Roche) 0.1 No No
No incorpora calculadora de
bolus.
Accu-Chek
Spirit Combo
(Roche)
0.01 Sí No
Programación de la bomba
desde glucómetro
inalámbrico.
Paradigm
522/722
(Medtronic)
0.1 Sí Sí
Comunicación inalámbrica
con 3 tipos de
glucómetros.
Paradigm
VEO
(Medtronic)
0.025 Sí Sí
Parada automática durante
2 horas en caso de
hipoglucemia.
A pesar de que las investigaciones de páncreas artificial llevan más de 50 años y ya se
utiliza en el tratamiento de la Diabetes Tipo 1, es necesario mejorar la fiabilidad para que
no ocurran fallas como obstrucciones, fugas, incorrecto sensado de glucosa. En la Tabla
1.2 se muestran las bombas de insulina actuales con sus características [7].
Algoritmos de control
En el sistema del páncreas artificial se requiere un controlador que se encargue de
mantener los niveles de glucosa entre los límites adecuados, en los periodos de ayuno y
después de la alimentación, y que puedan prevenir eventos de hiperglucemia e
hipoglucemia a pesar de las posibles perturbaciones. Los controladores deben adaptarse
a las particularidades fisiológicas que existen entre pacientes, y a las variaciones que
presenta el organismo de un paciente a lo largo de un día. El algoritmo de control debe
diseñarse tomando en cuenta que va a ser implementado en un dispositivo portátil, por lo
que no puede ser muy complejo [7].
15
Se han desarrollado varios algoritmos de control para el sistema de páncreas artificial en
los últimos 30 años [25]. De los controladores propuestos los que sobresalen son el clásico
Proporcional Integral Derivativo (PID), y el Controlador Predictivo basado en Modelo
conocido por sus siglas en inglés como MPC [25].
Perturbaciones y retardos
En este sistema de lazo cerrado se debe considerar que al ingerir alimentos (carbohidratos)
el nivel de glucosa se eleva, esto es considerado como una perturbación misma que puede
ser estimada en base a un cálculo por parte del paciente sobre la cantidad de carbohidratos
que se van a consumir [7]. Otras perturbaciones que pueden tener efecto en la respuesta
del sistema son la actividad física, situaciones de estrés, o incluso mantenerse en ayuno
prolongado. Todos éstos son escenarios que el algoritmo de control debe regular.
En cuanto a los retardos, desde que la insulina entra al cuerpo humano por vía subcutánea
hasta que se produce su efecto máximo en la disminución de la glucosa, puede tardar hasta
80 minutos. Por otro lado, el sensor de glucosa demora de 5 a 15 minutos en obtener la
medición de la glucosa en el plasma [7]. Estos dos retrasos se deben considerar en el
diseño del controlador ya que puede afectar a su rendimiento y generar retraso en la acción
del control.
Modelo glucosa-insulina
Para cumplir con los objetivos de control se debe utilizar un modelo matemático que
representa la regulación glucosa-insulina. En la realización de este tipo de modelos se
presentan dificultades propias de la modelación de sistemas biológicos. Como ya se
mencionó estos procesos pueden tener perturbaciones debido a diferentes causas [10].
Desde hace algunos años se ha venido trabajando en el desarrollo de modelos
matemáticos que describen el comportamiento de la regulación glucosa-insulina en el
cuerpo humano para poder realizar el control de la diabetes, entre éstos se pueden
mencionar los modelos de Bergman [26], de Chen y Tsai [27], de Cobelli [28] , Wilinska
[29] y Hovorka [1]. El estudio del modelo matemático es importante, puesto que permite
conocer de manera clara la forma en la que interactúa la glucosa con la insulina en el
cuerpo humano.
Independientemente del desarrollo de diferentes modelos matemáticos, la parte más
significativa de éstos es que deben poseer diferentes parámetros que son característicos
de cada paciente (variación interpaciente) y que algunos de estos parámetros pueden
cambiar a lo largo del tiempo (variación intrapaciente) [30]. Muchos de los modelos

16
planteados no llegan a describir el problema de manera adecuada ya que las muestras se
toman en lapsos de horas o pocos días, es decir, en un período corto de tiempo [1].
El modelo matemático elegido para este trabajo es el planteado por Roman Hovorka [1].
En este modelo se minimiza el problema de la variabilidad diaria de los parámetros pues
se realizaron mediciones de glucosa, insulina e ingesta de alimentos en un período de 12
semanas. Además, para mejorar la representación de los parámetros que son
característicos de cada paciente, la investigación se realizó en 8 adultos con Diabetes Tipo
1, 5 hombres y 3 mujeres que utilizaron un sistema en lazo cerrado de suministro de
insulina. Todas estas particularidades permiten una modelación más realista del sistema
que se pretende controlar.
El modelo glucosa-insulina de Hovorka [1] consiste de 7 ecuaciones, divididas en 3
subsistemas, teniendo como entrada la infusión subcutánea de insulina, como perturbación
de entrada la ingesta de carbohidratos y como salida la concentración de glucosa en la
sangre.
Absorción y acción de insulina
Las ecuaciones de este subsistema describen la absorción y acción de la insulina, y son:
𝑑𝑥1(𝑡)
𝑑𝑡= −
1
𝑡𝑚𝑎𝑥,𝐼𝐴𝑥1(𝑡) +
𝑢𝑖(𝑡)
60
Ecuación 1.1 Variación de insulina efectiva en el primer compartimento
𝑑𝑥2(𝑡)
𝑑𝑡=
1
𝑡𝑚𝑎𝑥,𝐼𝐴[𝑥1(𝑡) − 𝑥2(𝑡)]
Ecuación 1.2 Variación de insulina efectiva en el segundo compartimento
𝑋(𝑡) =1000 ∙ 𝑥2(𝑡)
𝑡𝑚𝑎𝑥,𝐼𝐴 ∙ 𝑀𝐶𝑅𝑖 ∙ 𝑊
Ecuación 1.3 Concentración efectiva de insulina Donde:
𝑡𝑚𝑎𝑥,𝐼𝐴 : Tiempo al máximo valor de concentración de insulina, [𝑚𝑖𝑛]
𝑊 : Peso, [𝑘𝑔]
𝑥1 : Cantidad de insulina en un primer compartimento de absorción, [𝑈
𝑚𝑖𝑛]
𝑥2 : Cantidad de insulina en un segundo compartimento de absorción, [𝑈
𝑚𝑖𝑛]
𝑢𝑖 : Tasa de infusión de insulina exógena en un tiempo t, [𝑈
ℎ]
17
𝑀𝐶𝑅𝑖 : Tasa de depuración metabólica de insulina, [𝑙
𝑘𝑔∗𝑚𝑖𝑛]
Dinámica de absorción de comida
En este subsistema se representa la absorción de comida mediante la siguiente ecuación:
𝑑𝑎1(𝑡)
𝑑𝑡= −
1
𝑡𝑚𝑎𝑥,𝐺𝑎1(𝑡) + 𝛿𝑡𝑗(𝑡) ∙ 𝑢𝐺(𝑡)
Ecuación 1.4 Variación de la cantidad de carbohidratos en el primer compartimento
𝑑𝑎2(𝑡)
𝑑𝑡=
1
𝑡𝑚𝑎𝑥,𝐺[𝑎1(𝑡) − 𝑎2(𝑡)]
Ecuación 1.5 Variación de la cantidad de carbohidratos en el segundo compartimento
𝑈𝑀(𝑡) =5.556 ∙ 𝐴𝐺 ∙ 𝑎2(𝑡)
𝑡𝑚𝑎𝑥,𝐼𝐴 ∙ 𝑉𝐺 ∙ 𝑊
Ecuación 1.6 Tasa de absorción de carbohidratos En donde:
𝑡𝑚𝑎𝑥,𝐺 : Tiempo al máximo valor de glucosa con el consumo de carbohidratos [𝑚𝑖𝑛]
𝑢𝐺 : Cantidad de carbohidratos consumidos en tiempo 𝑡𝑗 [𝑔]
𝑎1 : Cantidad de carbohidratos en un primer compartimento de comidas [𝑔]
𝑎2 : Cantidad de carbohidratos en un segundo compartimento de comidas [𝑔]
𝐴𝐺 : Biodisponibilidad fraccional [𝑎𝑑𝑖𝑚𝑒𝑛𝑠𝑖𝑜𝑛𝑎𝑙]
𝑉𝐺 : Tamaño de la piscina de glucosa plasmática [𝑙
𝑚𝑖𝑛]
Concentración de glucosa
La ecuación que se presenta a continuación muestra la cinética del monitoreo continuo de
concentración de glucosa en la sangre:
𝑑𝐺(𝑡)
𝑑𝑡= −𝑆𝐼[𝑋(𝑡) − 𝑋𝑏] + 𝑈𝑀 −𝐾[𝐺(𝑡) − 𝐺𝑏]
Ecuación 1.7 Variación de la concentración de glucosa en la sangre Donde:
𝐺 : Concentración de glucosa en la Sangre en, [𝑚𝑚𝑜𝑙
𝑙]
𝑆𝐼 : Sensibilidad a la insulina, [𝑚𝑚𝑜𝑙
𝑙∗𝑚𝑖𝑛𝑚𝑈
𝑙
]
𝑋(𝑡) : Concentración de insulina, [𝑚𝑈
𝑙]

18
𝑋𝑏 : Concentración basal de insulina, [𝑚𝑈
𝑙]
𝐺𝑏 : Nivel basal de concentración de glucosa en la sangre, [𝑚𝑚𝑜𝑙
𝑙]
𝐾 : Tasa de auto-regulación, [𝑙
𝑚𝑖𝑛]
𝑈𝑀 : Tasa de absorción intestinal de carbohidratos, [𝑚𝑚𝑜𝑙
𝑙∗𝑚𝑖𝑛]
Modelo de orden reducido
A medida que la tecnología avanza los sistemas a controlar aumentan su complejidad,
tienen varias entradas, salidas y generalmente son no lineales. Analizando la dinámica de
un sistema, generalmente mediante la curva de reacción, se puede reducir el orden de su
modelo [31]. Lo que se suele hacer es aproximar a un modelo de primer orden con retardo,
FOPDT, por sus siglas en inglés (First Order Plus Delay Time) que describe
adecuadamente el proceso en un punto de operación, por lo que se puede diseñar y
sintonizar controladores, haciendo su implementación más sencilla que al utilizar el modelo
de orden completo [32].
La curva de reacción es la respuesta en lazo abierto que se obtiene al excitar al sistema
en su punto de operación con una entrada de tipo escalón, como se muestra en la Figura
1.4. La señal obtenida desde cuando se aplica el cambio escalón hasta cuando se llega a
otro punto en que se mantiene constante permite obtener un modelo de primer orden con
retardo a partir de la ganancia 𝑘, la constante de tiempo 𝜏 y el tiempo muerto 𝑡0 que
representarán la dinámica del sistema en la función de transferencia, mostrada en la
Ecuación 1.8. 𝑈(𝑠) es la entrada al sistema y 𝑌(𝑠) es la señal de salida o variable a
controlar.
𝑌(𝑠)
𝑈(𝑠)=𝑘 𝑒−𝑡0 𝑠
𝜏𝑠 + 1
Ecuación 1.8 Aproximación de primer orden con retardo
La ganancia estática 𝑘 es una constante que indica cuanto varía la salida con respecto a
la entrada[33].
La constante de tiempo 𝜏 es el tiempo en que la respuesta del sistema pasa de 0 al 63.2%
del valor final de referencia. Este parámetro define la velocidad de respuesta del
sistema[33].
El tiempo muerto o retardo 𝑡0 es el tiempo en que se observa cambio en el sistema después
de haber sido excitado. Cuando un sistema tiene un retardo muy alto esto complica el
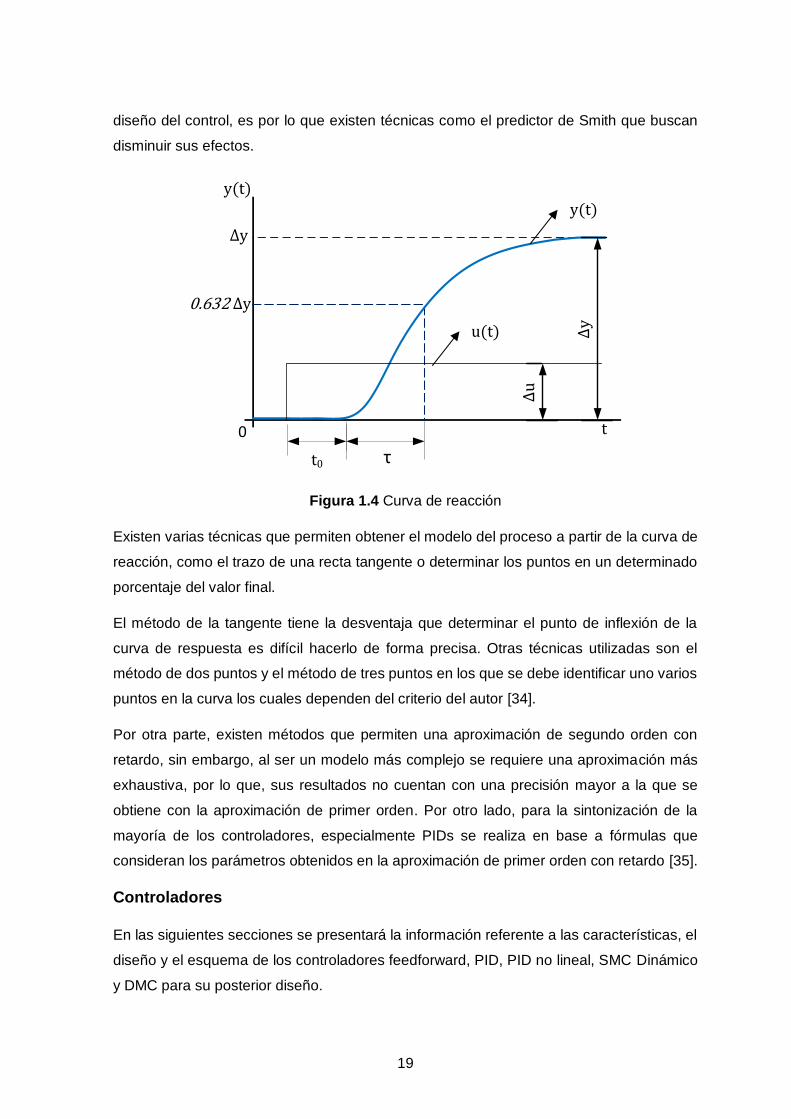
19
diseño del control, es por lo que existen técnicas como el predictor de Smith que buscan
disminuir sus efectos.
t0
y(t)
Δy
0.632 Δy
τ t0
Δy
Δu
y(t)
u(t)
Figura 1.4 Curva de reacción
Existen varias técnicas que permiten obtener el modelo del proceso a partir de la curva de
reacción, como el trazo de una recta tangente o determinar los puntos en un determinado
porcentaje del valor final.
El método de la tangente tiene la desventaja que determinar el punto de inflexión de la
curva de respuesta es difícil hacerlo de forma precisa. Otras técnicas utilizadas son el
método de dos puntos y el método de tres puntos en los que se debe identificar uno varios
puntos en la curva los cuales dependen del criterio del autor [34].
Por otra parte, existen métodos que permiten una aproximación de segundo orden con
retardo, sin embargo, al ser un modelo más complejo se requiere una aproximación más
exhaustiva, por lo que, sus resultados no cuentan con una precisión mayor a la que se
obtiene con la aproximación de primer orden. Por otro lado, para la sintonización de la
mayoría de los controladores, especialmente PIDs se realiza en base a fórmulas que
consideran los parámetros obtenidos en la aproximación de primer orden con retardo [35].
Controladores
En las siguientes secciones se presentará la información referente a las características, el
diseño y el esquema de los controladores feedforward, PID, PID no lineal, SMC Dinámico
y DMC para su posterior diseño.
20
Controlador feedforward
El feedforward es un esquema de control que toma la medición de una perturbación de
entrada a la planta antes de que ingrese al proceso, lo que le indica al controlador que la
variable de salida va a tener un cambio, en base a la medición se calcula el valor de la
variable manipulada necesario para contrarrestar el efecto de la perturbación [36]. Si el
cálculo se realizó correctamente la variable controlada no debe perturbarse, es por esto
que al feedforward se lo conoce como un controlador proactivo [32], en comparación, con
el controlador feedback que toma acciones correctivas sólo después de que las
perturbaciones ya han generado un cambio en el proceso.
Los controladores feedback pueden no llegar a controlar por completo la variable de salida
debido a perturbaciones presentes, lo que resulta en una desviación temporal, la cual
puede ser aceptada dependiendo del sistema que se esté controlando, sin embargo, en
otros procesos la desviación debe ser minimizada, para este tipo de plantas se utiliza el
controlador por variable preajustada, feedforward [37].
Para realizar un controlador de este tipo el sistema debe cumplir con ciertas condiciones.
• La perturbación debe ser de gran influencia en el proceso, además que se pueda
medir en línea, lo cual en muchas aplicaciones no es posible.
• La variable del feedforward (medición de la perturbación) no debe verse
influenciada por la variable manipulada.
• La dinámica de la perturbación no puede ser mucho más rápida que la dinámica de
la variable de salida, debido a que, si el efecto de la perturbación en la salida es
muy rápido, el controlador no alcanzará a prevenir la desviación en la respuesta
[36].
En el controlador feedforward es importante conocer por una parte el efecto de la variable
manipulada, 𝑈, en la variable de salida, 𝑌, y el efecto de la perturbación medida, 𝐷, en, 𝑌.
Dicho de otra manera, es importante conocer la dinámica de la variable manipulada y la
perturbación con respecto a la salida o variable controlada.
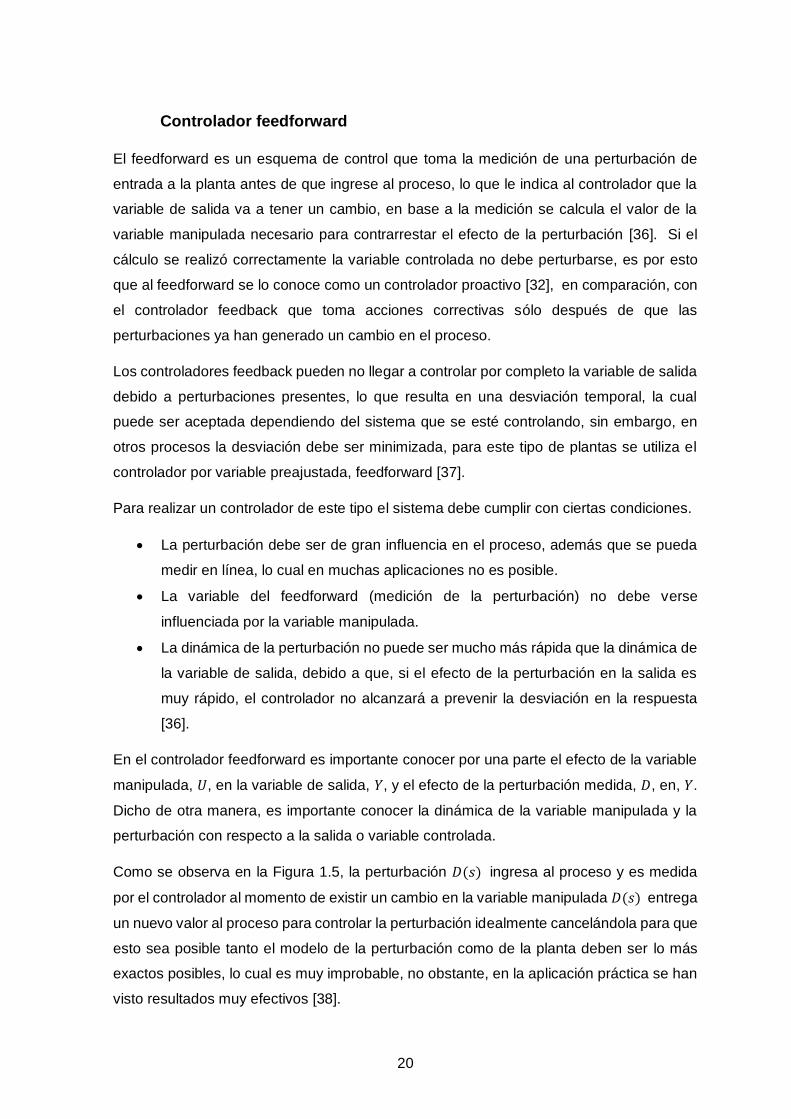
Como se observa en la Figura 1.5, la perturbación 𝐷(𝑠) ingresa al proceso y es medida
por el controlador al momento de existir un cambio en la variable manipulada 𝐷(𝑠) entrega
un nuevo valor al proceso para controlar la perturbación idealmente cancelándola para que
esto sea posible tanto el modelo de la perturbación como de la planta deben ser lo más
exactos posibles, lo cual es muy improbable, no obstante, en la aplicación práctica se han
visto resultados muy efectivos [38].
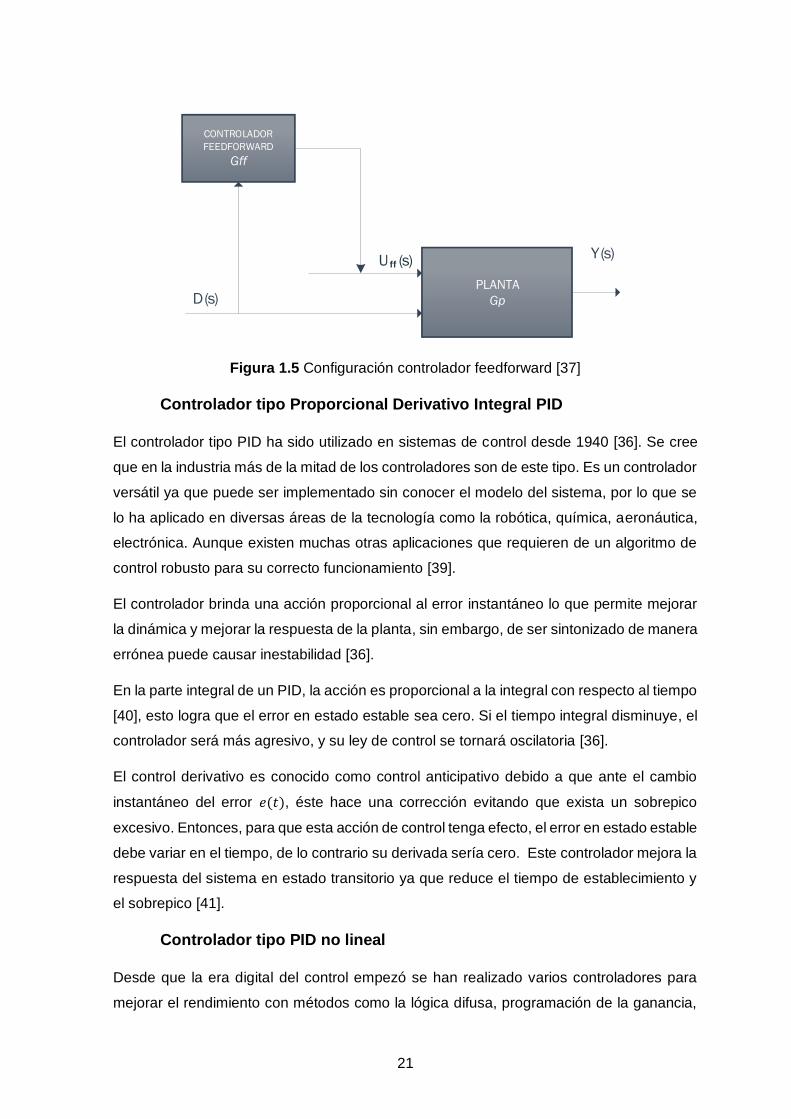
21
PLANTA
Gp
Y (s)U ff (s)
D (s)
CONTROLADOR
FEEDFORWARD
Gff
Figura 1.5 Configuración controlador feedforward [37]
Controlador tipo Proporcional Derivativo Integral PID
El controlador tipo PID ha sido utilizado en sistemas de control desde 1940 [36]. Se cree
que en la industria más de la mitad de los controladores son de este tipo. Es un controlador
versátil ya que puede ser implementado sin conocer el modelo del sistema, por lo que se
lo ha aplicado en diversas áreas de la tecnología como la robótica, química, aeronáutica,
electrónica. Aunque existen muchas otras aplicaciones que requieren de un algoritmo de
control robusto para su correcto funcionamiento [39].
El controlador brinda una acción proporcional al error instantáneo lo que permite mejorar
la dinámica y mejorar la respuesta de la planta, sin embargo, de ser sintonizado de manera
errónea puede causar inestabilidad [36].
En la parte integral de un PID, la acción es proporcional a la integral con respecto al tiempo
[40], esto logra que el error en estado estable sea cero. Si el tiempo integral disminuye, el
controlador será más agresivo, y su ley de control se tornará oscilatoria [36].
El control derivativo es conocido como control anticipativo debido a que ante el cambio
instantáneo del error 𝑒(𝑡), éste hace una corrección evitando que exista un sobrepico
excesivo. Entonces, para que esta acción de control tenga efecto, el error en estado estable
debe variar en el tiempo, de lo contrario su derivada sería cero. Este controlador mejora la
respuesta del sistema en estado transitorio ya que reduce el tiempo de establecimiento y
el sobrepico [41].
Controlador tipo PID no lineal
Desde que la era digital del control empezó se han realizado varios controladores para
mejorar el rendimiento con métodos como la lógica difusa, programación de la ganancia,
22
control adaptativo, sin embargo, los resultados dependen del sistema y no pueden ser
repetidos fácilmente para otros problemas de control [42].
Por otro lado, es conocido que los controladores tipo PID convencionales son
predominantes en la industria a pesar de que la mayoría de los procesos son no lineales o
con un retardo alto, además, el PID lineal sólo es eficiente en un punto de operación. Es
por esta razón que en las últimas décadas se han introducido diferentes tipos de PID
mejorados para suplir las desventajas. Una de las innovaciones fue propuesta por Jingqing
Han en 1994 [43] bajo el nombre de PID No Lineal (NPID).
El PID es una combinación lineal de funciones proporcional, integral y derivativa del error,
sin embargo, se deja de lado otras posibles combinaciones que pueden ser mucho más
efectivas [43]. El PID No Lineal nace a partir de la disputa del mejoramiento de la parte
transitoria y estable de la respuesta de un sistema.
El objetivo del NPID es introducir funciones no lineales del error para lograr que la
respuesta del sistema sea mejor a la de un PID convencional, un mejor seguimiento, mayor
rechazo al ruido [44], estas funciones producen una alta ganancia de control para valores
pequeños del error y una ganancia pequeña de control para altos valores del error [45].
Existen dos tipos de PID No Lineal: los que son aplicados a sistemas no lineales, en los
cuales el controlador busca una buena respuesta con el proceso en diferentes condiciones
sin importar su no linealidad; y los PID No Lineales aplicados a sistemas lineales que logran
mejores resultados en cuanto a tiempo de establecimiento, sobrepico, mayor amortiguación
con respecto a un PID lineal [45].
El PID No Lineal propuesto por [42] introduce una función no lineal (Ecuación 1.9) en la ley
de control.
𝑓𝑎𝑙(𝑒, 𝛼, 𝛿) = {|𝑒|𝛼𝑠𝑖𝑔𝑛(𝑒), |𝑒| > 𝛿𝑒
𝛿1−𝛼, |𝑒| ≤ 𝛿
Ecuación 1.9 Función no lineal
La interpretación gráfica de la función no lineal se muestra en la Figura 1.6,el parámetro 𝛿
brinda una región lineal cuyo propósito es prevenir una ganancia muy alta cuando el error
es pequeño, lo que se conoce como una causa de chattering de alta frecuencia [42].

23
δ 1 e
y
y = e y = fal (e,α,δ)
Figura 1.6 Función no lineal en NPID [42]
La configuración del controlador PID No Lineal se presenta en la Figura 1.7, está formado
por los errores proporcional, derivativo e integral que pertenecen a la función no lineal.
PLANTA
FUNCIÓN NO
LINEAL
fal (e,α,δ) + --
dt
d
dt SETPOINT
Y (t)
ė (t)
e dt
e (t)
r (t)
UPID(t)
Figura 1.7 Configuración de NPID
La selección de los parámetros de sintonización define la respuesta del sistema, pero en
general el NPID puede mejorar el rechazo al ruido, resuelve el problema de windup, evita
las saturaciones del PID convencional dado por ganancias muy altas cuando el error es
pequeño. La desventaja de este método es encontrar los parámetros ya que esto se realiza
en base a pruebas empíricas que consumen mucho tiempo.
Control por modos deslizantes dinámico
El Controlador por Modos Deslizantes Dinámico (DSMC) se desarrolla a partir del
Controlador por Modos Deslizantes (SMC). Para una mejor comprensión, se presentan, en
primer lugar, los fundamentos de este último controlador.
24
El control por modos deslizantes es una técnica de control robusto no lineal, ya que utiliza
el modelo real de orden superior de la planta [46], considerando esta dificultad, Camacho
y Smith en [47], proponen un diseño más sencillo de SMC puesto que se basa en un modelo
FOPDT; el uso de este modelo permite reducir la cantidad de variables de sintonización.
La robustez de este controlador permite compensar posibles errores de modelado [46] y
perturbaciones externas.
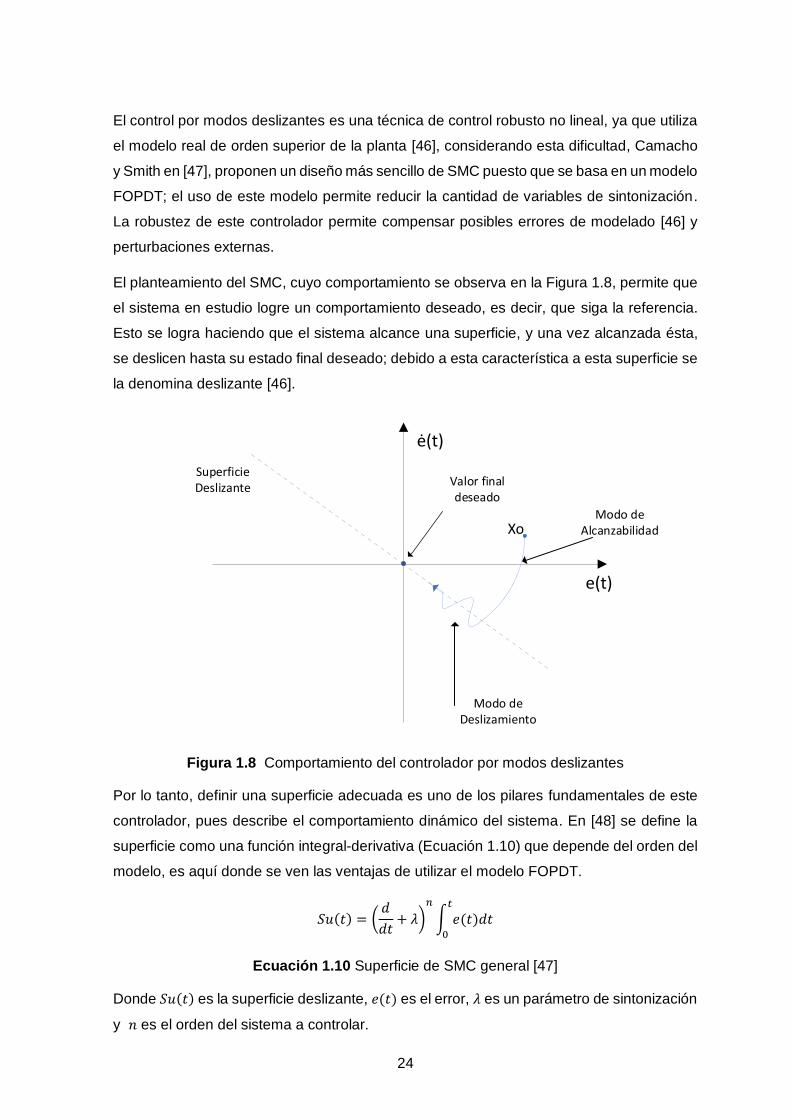
El planteamiento del SMC, cuyo comportamiento se observa en la Figura 1.8, permite que
el sistema en estudio logre un comportamiento deseado, es decir, que siga la referencia.
Esto se logra haciendo que el sistema alcance una superficie, y una vez alcanzada ésta,
se deslicen hasta su estado final deseado; debido a esta característica a esta superficie se
la denomina deslizante [46].
ė(t)
e(t)
Xo
Valor final deseado
Superficie Deslizante
Modo de Deslizamiento
Modo de Alcanzabilidad
Figura 1.8 Comportamiento del controlador por modos deslizantes
Por lo tanto, definir una superficie adecuada es uno de los pilares fundamentales de este
controlador, pues describe el comportamiento dinámico del sistema. En [48] se define la
superficie como una función integral-derivativa (Ecuación 1.10) que depende del orden del
modelo, es aquí donde se ven las ventajas de utilizar el modelo FOPDT.
𝑆𝑢(𝑡) = (𝑑
𝑑𝑡+ 𝜆)
𝑛
∫ 𝑒(𝑡)𝑑𝑡𝑡
0
Ecuación 1.10 Superficie de SMC general [47]
Donde 𝑆𝑢(𝑡) es la superficie deslizante, 𝑒(𝑡) es el error, 𝜆 es un parámetro de sintonización
y 𝑛 es el orden del sistema a controlar.
25
Para lograr su objetivo, la ley de control del SMC está constituida de dos componentes: un
componente discontinuo o modo de alcanzabilidad y un componente continuo o modo de
deslizamiento (Ecuación 1.11).
𝑈𝑆𝑀𝐶 = 𝑈𝐶(𝑡) + 𝑈𝐷(𝑡)
Ecuación 1.11 Ley de control SMC
Con respecto al componente discontinuo 𝑈𝐷(𝑡) o modo de alcanzabilidad, como su nombre
lo indica, es el que permite que la variable de salida se mueva desde su estado inicial y
alcance la superficie tan rápido como sea posible. Este componente es no lineal y está
definido por la Ecuación 1.12, en donde la función signo permite el avance sobre la
superficie de deslizamiento pues realiza las conmutaciones de la trayectoria, y el 𝐾𝐷
permite determinar la agresividad con la que se acerca a la superficie.
𝑈𝐷(𝑡) = 𝐾𝐷𝑠𝑖𝑔𝑛(𝑆𝑢(𝑡))
Ecuación 1.12 Componente discontinuo SMC
Debido a la componente discontinua, la mayor deficiencia que muestran estos
controladores es la presencia de chattering en la ley de control. Este fenómeno consiste en
oscilaciones de alta frecuencia y amplitud finita, lo que causa desgaste en los elementos
finales de control, menor precisión del controlador, entre otros [46].
Para evitar este problema se realiza el reemplazo de la función signo por la función
sigmoide Ecuación 1.13, en donde el elemento 𝛽 se encarga de reducir el chattering.
𝑈𝐷(𝑡) = 𝐾𝐷𝑆𝑢(𝑡)
|𝑆𝑢(𝑡)| + 𝛽
Ecuación 1.13 Componente discontinuo SMC con función sigmoide
En cuanto al componente continuo 𝑈𝐶(𝑡), se encarga de que la variable controlada se
deslice tangencialmente sobre la superficie, es decir, que la tangente sea cero, para que
se mantenga sobre ésta hasta llegar a la referencia; así pues, para que esto se dé se debe
cumplir la Ecuación 1.14. en donde se deberá sustituir la superficie escogida,
procedimiento que se realizará en el siguiente capítulo con el objetivo de encontrar la parte
continua de la ley de control.
𝑑𝑆𝑢(𝑡)
𝑑𝑡= 0
Ecuación 1.14 Condición del modo de deslizamiento

26
Desde hace algunos años el Controlador por Modo Deslizante Dinámico (DSMC) ha venido
tomando mayor importancia debido a que mejoran deficiencias del SMC, como el
chattering, permitiendo su implementación en diferentes procesos [49], [50], [51].
Para que un SMC sea considerado dinámico es necesario que se introduzcan dinámicas
adicionales, mismas que pueden ser consideradas como compensadores. Mediante la
introducción de esta dinámica se busca mejorar el desempeño del controlador SMC [52].
Las estrategias del DSMC permiten la reducción del chattering en las señales de control,
puesto que logran tener señales más suavizadas a la entrada del proceso, sin la necesidad
de realizar ajustes bruscos en los parámetros del controlador [53]. De esta manera el
DSMC aprovecha las ventajas que presta el SMC y ayuda a disminuir las falencias que
este controlador posee [52].
Existen diversas técnicas para la aplicación del DSMC, según [54], en el diseño de estos
controladores se busca reemplazar la parte no lineal del modelo FOPDT, el retardo del
sistema, por aproximaciones, ya sea mediante series de Taylor o la aproximación de Padé
(Tabla 1.3).
Tabla 1.3 Aproximaciones del retardo [55]
Taylor
numerador
Taylor
denominador Padé
1 − 𝑡0𝑠 1
𝑡0𝑠 + 1
1 − 0.5𝑡0𝑠
1 + 0.5𝑡0𝑠
Algunas de estas aproximaciones pueden aumentar polos inestables al sistema, por lo que,
para evitar este inconveniente, el diseño de estos controladores incluye estructuras de
modelo interno.
Otra técnica para el diseño del DSMC es la utilización de un filtro de primer orden (Ecuación
1.15) [54] en lugar de utilizar aproximaciones del retardo.
𝐹(𝑠) = 𝑡𝑓𝑠 + 1
Ecuación 1.15. Filtro de primer orden
Este filtro incrementa la estabilidad y mejora el tiempo de establecimiento [46], para esto
se coloca estratégicamente en el numerador y denominador del modelo FOPDT, así, este
modelo queda conformado de una parte invertible y una no invertible.
27
𝐺𝑝(𝑠) = 𝐺𝑝−(𝑠)𝐺𝑝
+(𝑠)
Ecuación 1.16 Componente invertible y no invertible del modelo
Al igual que los controladores basados en modelo interno (IMC), para obtener el nuevo
controlador DSMC con filtro, cuyo desarrollo se explicará más adelante, se utiliza
únicamente la parte invertible, de esta manera, no se utiliza la parte del modelo en la que
se encuentra el retardo del sistema. La parte invertible se convierte en una función de
transferencia en adelanto-atraso [46].
Al colocar este filtro de primer orden, debido a las características de la compensación en
adelanto-atraso, se logra mejorar las características de respuesta del sistema, y además
el proceso logra mayor estabilidad [46].
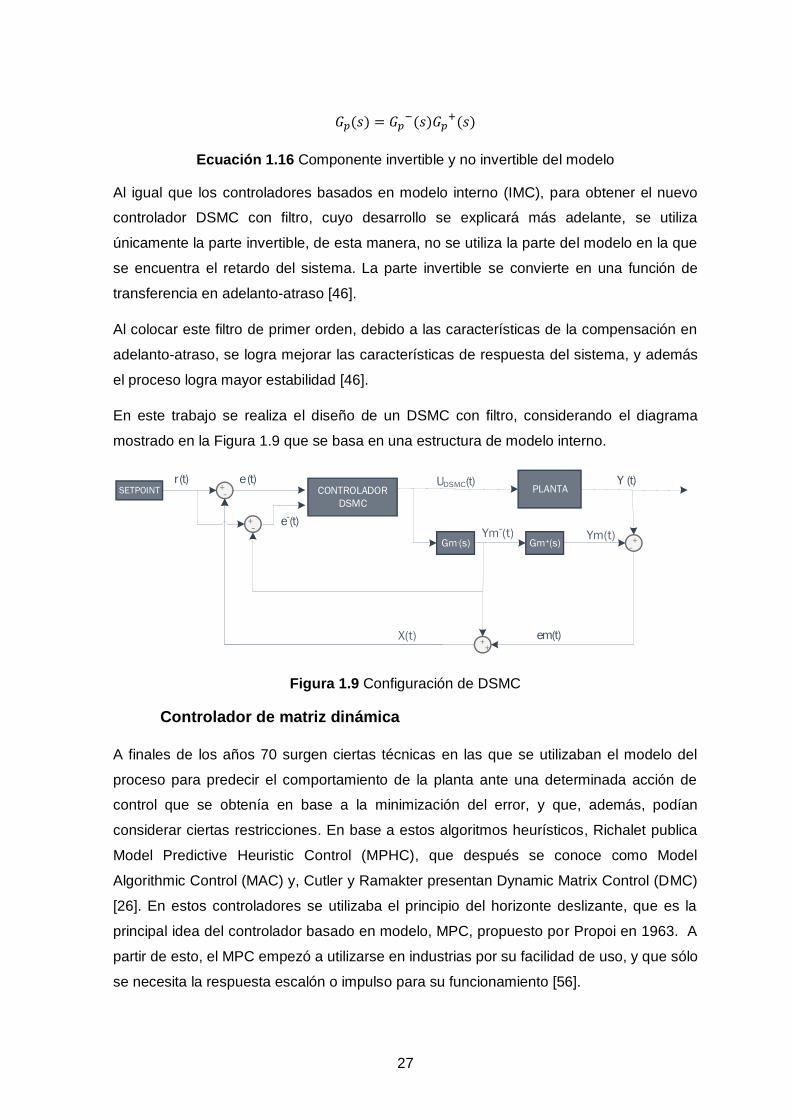
En este trabajo se realiza el diseño de un DSMC con filtro, considerando el diagrama
mostrado en la Figura 1.9 que se basa en una estructura de modelo interno.
PLANTACONTROLADOR
DSMC
+ --SETPOINT
Y (t)UDSMC(t)e (t)r (t)
+ --
+ +
Gm-(s) Gm+(s) Ym-(t) Ym(t)
em(t)X(t)
+ --
e-(t)
Figura 1.9 Configuración de DSMC
Controlador de matriz dinámica
A finales de los años 70 surgen ciertas técnicas en las que se utilizaban el modelo del
proceso para predecir el comportamiento de la planta ante una determinada acción de
control que se obtenía en base a la minimización del error, y que, además, podían
considerar ciertas restricciones. En base a estos algoritmos heurísticos, Richalet publica
Model Predictive Heuristic Control (MPHC), que después se conoce como Model
Algorithmic Control (MAC) y, Cutler y Ramakter presentan Dynamic Matrix Control (DMC)
[26]. En estos controladores se utilizaba el principio del horizonte deslizante, que es la
principal idea del controlador basado en modelo, MPC, propuesto por Propoi en 1963. A
partir de esto, el MPC empezó a utilizarse en industrias por su facilidad de uso, y que sólo
se necesita la respuesta escalón o impulso para su funcionamiento [56].
28
El MPC no es un algoritmo de controlador específico sino más bien un conjunto de
estrategias que utilizan el modelo del proceso para realizar una predicción de su respuesta,
y así obtener una señal de control minimizando una función objetivo. A continuación, se
presentan las ventajas del MPC [57].
• Sus parámetros de sintonización son de fácil comprensión.
• Puede usarse en gran variedad de procesos MIMO, SISO, con retardo e incluso
procesos inestables.
• La ley de control es de fácil implementación.
• Es posible considerar restricciones si el proceso así lo amerita, lo cual permite la
eficiencia del sistema. Incluso se pueden incluir limitaciones que pueda tener el
actuador.
• A partir de una primera implementación se pueden realizar fácilmente ajustes para
mejorar el funcionamiento de acuerdo con nuevas condiciones del proceso.
El MPC es la única técnica de control avanzado que ha logrado tener un impacto
significativo en cuanto a su utilización en la industria tanto como el PID [58]. Los tipos de
MPC se diferencian entre sí, por el modelo para representar el proceso, no obstante, todos
ellos se basan en el mismo procedimiento para el cálculo de la secuencia de control. El
MPC utiliza una estrategia deslizante en la que se obtiene la ley de control a partir de una
predicción, pero sólo se utiliza el primer valor, para el instante siguiente se vuelve a realizar
el cálculo y esto se realiza sucesivamente en cada instante de muestreo. El objetivo de un
MPC es determinar una ley de control de forma que se llegue a un valor deseado, es por
ello que el MPC no sólo sigue un setpoint específico, sino que busca una trayectoria del
setpoint [59]. Los principales componentes de un MPC son el modelo de predicción, la
función objetivo y la obtención de la ley de control [60].
El modelo del proceso debe capturar toda su dinámica, debe ser lo más cerca de la realidad
para que su predicción sea muy confiable, y se pueda obtener los valores de la salida en
los instantes futuros �̂�(𝑡 + 𝑘|𝑡) [61].
La función objetivo o costo generalmente tiene la forma de una función cuadrática en donde
se busca que la salida predicha (�̂�) siga la referencia dentro del horizonte de predicción (𝑟),
y además se considera el esfuerzo de control. Si el sistema es lineal y no se tienen
restricciones la secuencia de control se puede obtener a través de una solución analítica
[61]. La función costo que se utiliza en este trabajo se encuentra en la Ecuación 1.19.
En cuanto al controlador por matriz dinámica (DMC), se diseñó para predecir la respuesta
futura de una planta, fue desarrollado en la empresa Shell Oil a finales de los años 70, con
29
el interés de emplear esta técnica en las refinerías de petróleo, actualmente es utilizado en
gran variedad de procesos [62].
El DMC es una estrategia de control predictivo en la que la acción de control se obtiene al
resolver un problema de optimización en un horizonte finito, utilizando la respuesta a una
entrada escalón como modelo. La optimización da como resultado una secuencia de
control de la cual se toma el primer valor y se realiza este procedimiento repetidamente.
El Controlador Dinámico Matricial, como ya se dijo, basa la predicción de la salida en el
modelo de la planta ante una entrada escalón de lo que se obtiene la siguiente ecuación
𝑦(𝑡) =∑𝑠𝑖
∞
𝑖=1
∆𝑢(𝑡 − 𝑖)
Ecuación 1.17 Respuesta del modelo ante una entrada escalón Donde:
𝑠𝑖 : Es la respuesta en cada instante de tiempo ante la entrada escalón unitario.
∆𝑢𝑡−𝑖 : Es la diferencia entre el valor de la variable manipulada actual (𝑢𝑡) y en el
instante anterior (𝑢𝑡−1).
Entonces la respuesta infinita ante una entrada escalón se puede escribir como la salida
predicha.
�̂�(𝑡 + 𝑘|𝑡) =∑𝑠𝑖 ∆𝑢(𝑡 + 𝑘 − 𝑖)
∞
𝑖=1
Ecuación 1.18 Respuesta predicha del modelo ante una entrada escalón
La función objetivo utilizada en el DMC es la mostrada a continuación y debe estar sujeta
a la Ecuación 1.18 [59]
𝑀𝑖𝑛𝑖𝑚𝑖𝑧𝑎𝑟∆𝑢
𝐽(∆𝑈) = (𝑟 − �̂�)𝑇𝑄(𝑟 − �̂�) + ∆𝑈𝑇𝑅∆𝑈
Ecuación 1.19 Función objetivo [59]
Donde:
𝑟 : Es la referencia.
𝑄 y 𝑅 : Son matrices de los pesos que se asignan a la respuesta y al control
respectivamente.
30
Restricciones en controladores predictivos.
En la ley de control obtenida a partir de la minimización, se considera que los resultados
pueden tener valores ilimitados, sin embargo, en la mayoría de los procesos existen
restricciones dadas por las características constructivas de los dispositivos, razones de
seguridad, calidad de producción y cantidad de producción con respecto al tiempo [56].
Si se apela a un ejemplo, los actuadores en el lazo de control tienen limitaciones en cuanto
a su velocidad y posición de apertura tal es el caso de una válvula de control, de igual
manera en una máquina de inducción se debe considerar la corriente máxima a la que
puede funcionar correctamente. En general, todo dispositivo tiene un rango de
funcionamiento. Algo semejante ocurre en determinados procesos en donde existen
motivos de seguridad que limitan el funcionamiento de un algoritmo de control, tal como el
nivel, presión o temperatura máxima de tanques o caudales, el no cumplimiento de estas
restricciones puede causar accidentes lo cual resulta más costoso de haber una pérdida
de producción y que además compromete la seguridad de las personas. Así mismo, en la
actualidad se busca que los procesos operen en determinadas circunstancias con el fin de
obtener beneficios económicos lo cual implica que el diseño del controlador considere
ciertas restricciones para mantener la planta en dicho punto de operación[61].
Específicamente, en el caso del páncreas artificial las restricciones que se tiene es que el
actuador del lazo es una bomba de insulina, por lo cual el valor de la secuencia de control
debe ser siempre un valor positivo, de la misma forma como ya se ha dicho los niveles de
glucosa no deben llegar a los niveles de hiperglucemia e hipoglucemia.
Generalmente para considerar estas limitaciones se suele obtener la ley de control y de
existir valores que no cumplan las restricciones se satura al valor máximo o mínimo de ser
el caso. Ésta es una de las principales ventajas de un controlador predictivo, que los valores
que serán aplicados a la variable manipulada son óptimos, y que se puede predecir el no
cumplimiento de las restricciones impuestas.
Las restricciones aplicadas al controlador constituyen conjuntos normalmente acotados y
cerrados a los que pertenecen la variable manipulada, su tasa de cambio, y los estados de
la planta [2], lo que se puede observar en la Ecuación 1.20, la Ecuación 1.21, y la Ecuación
1.22.
𝑢𝑚𝑖𝑛 ≤ 𝑢 ≤ 𝑢𝑚𝑎𝑥
Ecuación 1.20 Restricción de control
31
𝛿𝑚𝑖𝑛 ≤ ∆𝑢 ≤ 𝛿𝑚𝑎𝑥
Ecuación 1.21 Restricción de tasa cambio del control
𝑦𝑚𝑖𝑛 ≤ �̂� ≤ 𝑦𝑚𝑎𝑥
Ecuación 1.22 Restricción de los estados
Índices de desempeño
Dado que se tiene 4 controladores, para realizar una comparación que no sólo se base en
la visualización de la respuesta gráfica de la salida, es necesario realizar el cálculo de
índices que permitan cuantificar el desempeño de los controladores.
El uso de índices en base al error integral es una buena alterativa, ya que permite evaluar
la salida de la planta a lo largo de todo el tiempo de simulación, puesto que el error es la
diferencia entre la salida de la planta y la referencia.
En adición a esto, existen varios métodos que utilizan este concepto. Algunos de éstos son:
Índice de la integral del valor absoluto del error (IAE) e Índice de la integral del error al
cuadrado (ISE) que, matemáticamente y conceptualmente presentan diferencias.
Al momento de aplicarlos, cada uno realiza una ponderación que describa mejor una
característica específica de la planta. Es así que, el ISE (Ecuación 1.23) sanciona errores
grandes debido a que los eleva al cuadrado, por lo contrario, minimiza los errores
pequeños, esto hace que, mientras menor es el índice, se produzcan respuestas
oscilatorias pero rápidas. Por otra parte, el IAE (Ecuación 1.24) no añade pesos al error,
por lo tanto, mientras más pequeño el índice, la planta es más lenta pero con menos
oscilación [63].
𝐼𝑆𝐸 = ∫ 𝑒2(𝑡)𝑑𝑡𝑇
0
Ecuación 1.23. ISE
𝐼𝐴𝐸 = ∫ |𝑒(𝑡)|𝑑𝑡𝑇
0
Ecuación 1.24. IAE
Tomando en cuenta las características mencionadas anteriormente, en este trabajo se
utiliza el índice ISE, ya que se busca que la planta responda rápido ante perturbaciones y
que se mantenga dentro de la banda de normoglucemia, sin que necesariamente alcance
la referencia.
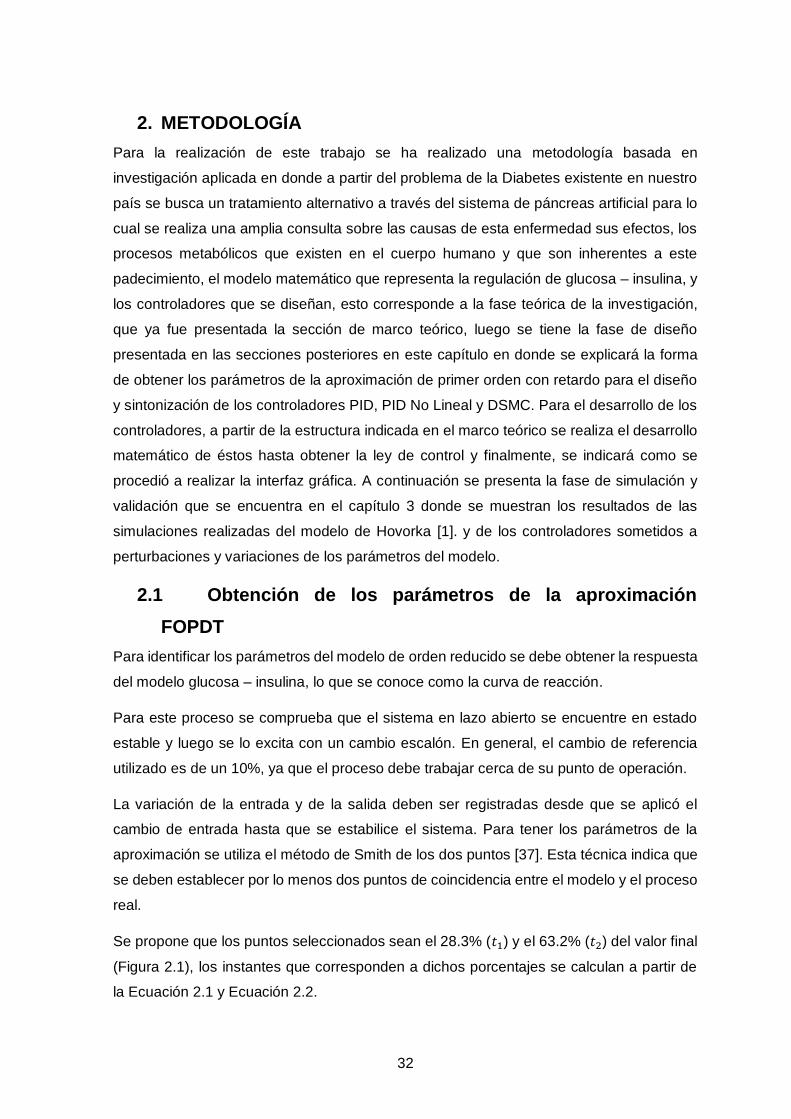
32
2. METODOLOGÍA
Para la realización de este trabajo se ha realizado una metodología basada en
investigación aplicada en donde a partir del problema de la Diabetes existente en nuestro
país se busca un tratamiento alternativo a través del sistema de páncreas artificial para lo
cual se realiza una amplia consulta sobre las causas de esta enfermedad sus efectos, los
procesos metabólicos que existen en el cuerpo humano y que son inherentes a este
padecimiento, el modelo matemático que representa la regulación de glucosa – insulina, y
los controladores que se diseñan, esto corresponde a la fase teórica de la investigación,
que ya fue presentada la sección de marco teórico, luego se tiene la fase de diseño
presentada en las secciones posteriores en este capítulo en donde se explicará la forma
de obtener los parámetros de la aproximación de primer orden con retardo para el diseño
y sintonización de los controladores PID, PID No Lineal y DSMC. Para el desarrollo de los
controladores, a partir de la estructura indicada en el marco teórico se realiza el desarrollo
matemático de éstos hasta obtener la ley de control y finalmente, se indicará como se
procedió a realizar la interfaz gráfica. A continuación se presenta la fase de simulación y
validación que se encuentra en el capítulo 3 donde se muestran los resultados de las
simulaciones realizadas del modelo de Hovorka [1]. y de los controladores sometidos a
perturbaciones y variaciones de los parámetros del modelo.
2.1 Obtención de los parámetros de la aproximación
FOPDT
Para identificar los parámetros del modelo de orden reducido se debe obtener la respuesta
del modelo glucosa – insulina, lo que se conoce como la curva de reacción.
Para este proceso se comprueba que el sistema en lazo abierto se encuentre en estado
estable y luego se lo excita con un cambio escalón. En general, el cambio de referencia
utilizado es de un 10%, ya que el proceso debe trabajar cerca de su punto de operación.
La variación de la entrada y de la salida deben ser registradas desde que se aplicó el
cambio de entrada hasta que se estabilice el sistema. Para tener los parámetros de la
aproximación se utiliza el método de Smith de los dos puntos [37]. Esta técnica indica que
se deben establecer por lo menos dos puntos de coincidencia entre el modelo y el proceso
real.
Se propone que los puntos seleccionados sean el 28.3% (𝑡1) y el 63.2% (𝑡2) del valor final
(Figura 2.1), los instantes que corresponden a dichos porcentajes se calculan a partir de
la Ecuación 2.1 y Ecuación 2.2.
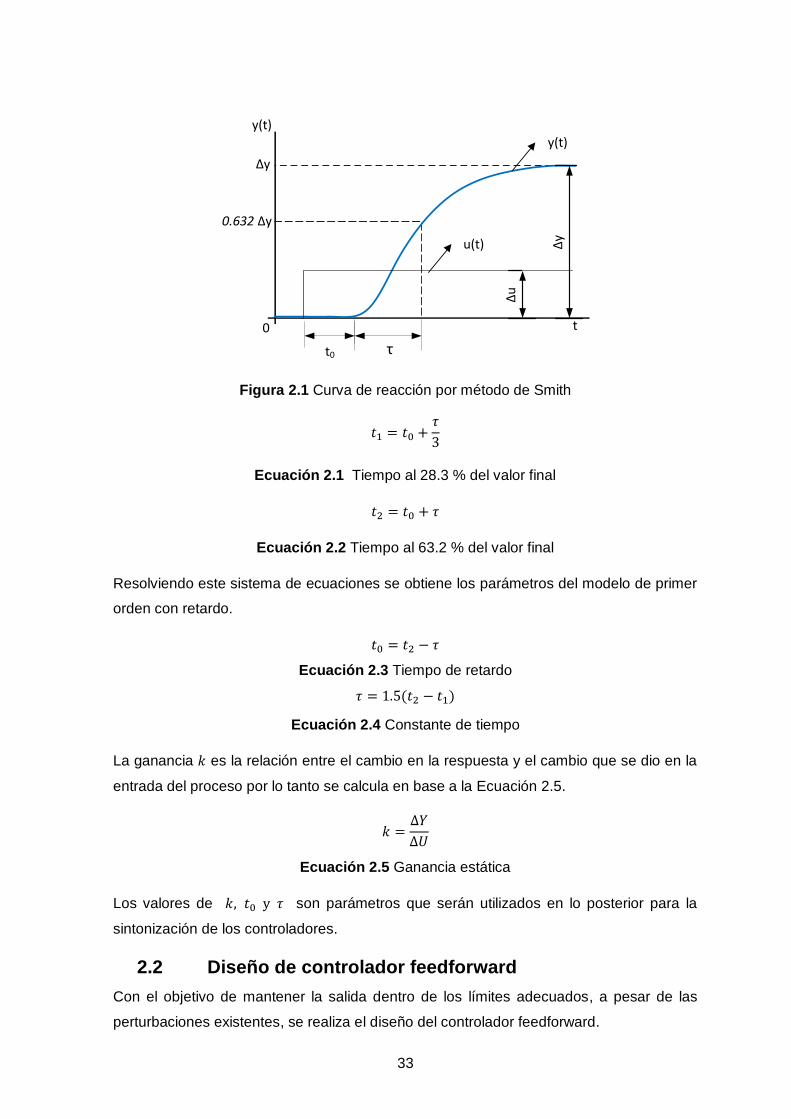
33
t0
y(t)
Δy
0.632 Δy
τ t0
Δy
Δu
y(t)
u(t)
Figura 2.1 Curva de reacción por método de Smith
𝑡1 = 𝑡0 +𝜏
3
Ecuación 2.1 Tiempo al 28.3 % del valor final
𝑡2 = 𝑡0 + 𝜏
Ecuación 2.2 Tiempo al 63.2 % del valor final
Resolviendo este sistema de ecuaciones se obtiene los parámetros del modelo de primer
orden con retardo.
𝑡0 = 𝑡2 − 𝜏
Ecuación 2.3 Tiempo de retardo
𝜏 = 1.5(𝑡2 − 𝑡1)
Ecuación 2.4 Constante de tiempo
La ganancia 𝑘 es la relación entre el cambio en la respuesta y el cambio que se dio en la
entrada del proceso por lo tanto se calcula en base a la Ecuación 2.5.
𝑘 =∆𝑌
∆𝑈
Ecuación 2.5 Ganancia estática
Los valores de 𝑘, 𝑡0 y 𝜏 son parámetros que serán utilizados en lo posterior para la
sintonización de los controladores.
2.2 Diseño de controlador feedforward
Con el objetivo de mantener la salida dentro de los límites adecuados, a pesar de las
perturbaciones existentes, se realiza el diseño del controlador feedforward.

34
Se tiene que 𝐺𝑝 es el modelo FOPDT de la planta, que representa el efecto de la variable
controlada 𝑌(𝑠) ante un cambio de la variable manipulada 𝑈(𝑠),
𝐺𝑝(𝑠) =𝑌(𝑠)
𝑈(𝑠)= 𝑘
𝑒−𝑡0 𝑠
𝜏𝑠 + 1
Ecuación 2.6 Aproximación de FOPDT de la planta
𝐺𝐷 es el modelo FOPDT de la perturbación que representa el efecto de la perturbación
𝐷(𝑠), en la variable controlada 𝑌(𝑠),
𝐺𝐷 =𝑌(𝑠)
𝐷(𝑠)= 𝑘𝑑
𝑒−𝑡0𝑑 𝑠
𝜏𝑑𝑠 + 1
Ecuación 2.7 Aproximación de FOPDT de la perturbación
Y 𝐺𝑓𝑓 es el controlador feedforward que viene dado por la Ecuación 2.8.
𝐺𝑓𝑓(𝑠) = −𝐺𝐷(𝑠)
𝐺𝑝(s)= −
𝑘𝑑
𝑘 𝜏𝑠 + 1
𝜏𝑑𝑠 + 1 𝑒−(𝑡0𝑑−𝑡0) 𝑠
Ecuación 2.8 Controlador feedforward
Este controlador cuenta con una parte estática que depende de las constantes 𝑘𝑑 y 𝑘, y
una parte dinámica, que está en función de las constantes de tiempo, y el tiempo de retardo
de la planta y de la perturbación.
Para el caso de estudio se realizaron pruebas utilizando el controlador feedforward con su
parte estática y dinámica, y se observó que la señal de control obtenida no cuenta con las
características apropiadas para su implementación ya que toma valores negativos. Por lo
que, se utiliza sólo la parte estática en la ley de control que viene dada por la Ecuación 2.9.
𝑈𝑓𝑓(𝑡) = 𝐾𝑓𝑓 =𝑘𝑑
𝑘
Ecuación 2.9 Ley de control del feedforward
2.3 Diseño del controlador tipo PID
Un controlador de tipo PID tiene tres acciones proporcional, derivativa e integral. La función
de transferencia de este controlador se puede observar en la Ecuación 2.10.
𝑈𝑃𝐼𝐷(𝑡) = 𝑘𝑝 (𝑒(𝑡) +1
𝑇𝑖∫𝑒(𝑡) + 𝑇𝑑
𝑑𝑒(𝑡)
𝑑𝑡)
Ecuación 2.10 Ley de control PID
Donde:
𝑘𝑝 : Constante Proporcional.

35
𝑇𝑖 : Tiempo Integral.
𝑇𝑑 : Tiempo Derivativo.
Para encontrar estas variables, Dahlin propone una forma de sintonización para los
controladores tipo PID como se muestra en la Tabla 2.1 [35].
Tabla 2.1 Parámetros de sintonización del controlador tipo PID según Dahlin [35]
Controlador / Parámetro PID
𝑘𝑝 𝜏
2 𝑘 𝑡0
𝑇𝑖 𝜏
𝑇𝑑 0.5 𝑡0
Cabe recalcar que, este controlador es implementado para su posterior comparación con
los controladores avanzados frente a variaciones de los parámetros del modelo.
2.4 Diseño de controlador tipo PID no lineal
En [42] se presenta un cambio en el PID clásico como se muestra en la Ecuación 2.11.
𝑈𝑁𝑃𝐼𝐷 = 𝑘𝑝 [ 𝑓𝑎𝑙(𝑒𝑝, 𝛼𝑝, 𝛿) +1
𝑇𝑖𝑓𝑎𝑙(𝑒𝑖 , 𝛼𝑖 , 𝛿) + 𝑇𝑑𝑓𝑎𝑙(𝑒𝑑 , 𝛼𝑑 , 𝛿)]
Ecuación 2.11 Ley de control PID no lineal
Donde:
𝑘𝑝, 𝑇𝑖, 𝑇𝑑 : Parámetros de sintonización de un PID convencional.
𝑓𝑎𝑙(𝑒𝑝, 𝛼𝑝, 𝛿), 𝑓𝑎𝑙(𝑒𝑖 , 𝛼𝑖, 𝛿), 𝑓𝑎𝑙(𝑒𝑑 , 𝛼𝑑 , 𝛿) : Funciones no lineales (descritas a
continuación.)
𝑓𝑎𝑙(𝑒𝑝 , 𝛼𝑝, 𝛿) =
{
|𝑒𝑝|
𝛼𝑝𝑠𝑖𝑔𝑛(𝑒𝑝), |𝑒𝑝| > 𝛿
𝐵𝑒𝑝
𝛿1−𝛼𝑝, |𝑒𝑝| ≤ 𝛿
Ecuación 2.12 Función no lineal parte proporcional
La Ecuación 2.12 indica la parte proporcional del controlador NPID, esta función depende
del error proporcional y la constante de sintonización 𝛼𝑝.

36
𝑓𝑎𝑙(𝑒𝑖 , 𝛼𝑖 , 𝛿) = {
|𝑒𝑖|𝛼𝑖 𝑠𝑖𝑔𝑛(𝑒𝑖), |𝑒𝑖| > 𝛿
𝐵𝑒 𝑖
𝛿1−𝛼𝑖, |𝑒𝑖| ≤ 𝛿
Ecuación 2.13 Función no lineal parte integral
Por su parte, la Ecuación 2.13 es la función que pertenece a la parte integral del controlador
y depende del valor del error integral y la constante 𝛼𝑖.
𝑓𝑎𝑙(𝑒𝑑 , 𝛼𝑑 , 𝛿) = {
|𝑒𝑑|𝛼𝑑 𝑠𝑖𝑔𝑛(𝑒𝑑), |𝑒𝑑| > 𝛿
𝐵𝑒𝑑
𝛿1−𝛼𝑑, |𝑒𝑑| ≤ 𝛿
Ecuación 2.14 Función no lineal parte derivativa
Por último, en la Ecuación 2.14 se muestra la función no lineal de la parte derivativa y que
depende del error derivativo y la constante 𝛼𝑑.
De las funciones antes descritas se tiene:
𝑒𝑝, 𝑒𝑖 y 𝑒𝑑 : Errores proporcional, integral y derivativo respectivamente.
𝛼𝑝, 𝛼𝑖 y 𝛼𝑑 : Constantes de sintonización que varían la función exponencial (no lineal).
𝛿 : Constantes de sintonización que varía la zona lineal.
Las funciones no lineales del error dependen del parámetro 𝛿 que indica cuán grande será
la región lineal en la que el controlador actuará como un PID clásico, por lo que su valor
debe ser comparable con la magnitud del error. Es decir, cuando el valor de 𝛿 es cero el
controlador es completamente no lineal (Figura 2.2) y (Figura 2.4), y mientras más alto sea
este parámetro el controlador será más lineal (Figura 2.3) y (Figura 2.5).
Para realizar la sintonización del NPID se debe tomar en cuenta los aspectos detallados
en la Tabla 2.2 y Tabla 2.3. Esto se analizó tomando en cuenta la función no lineal del error.
La Tabla 2.2 describe las gráficas de la función no lineal del error cuando (0 < α < 1).
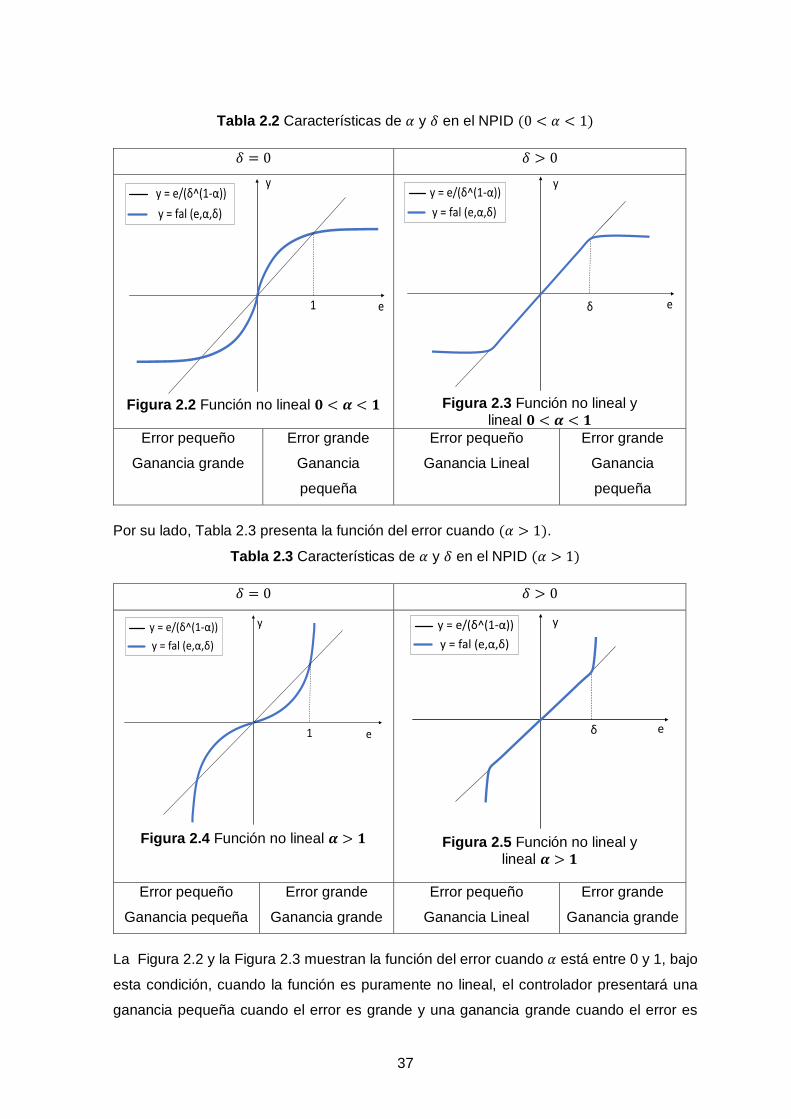
37
Tabla 2.2 Características de 𝛼 y 𝛿 en el NPID (0 < 𝛼 < 1)
𝛿 = 0 𝛿 > 0
1 e
y
y = fal (e,α,δ)
y = e/(δ^(1-α))
Figura 2.2 Función no lineal 𝟎 < 𝜶 < 𝟏
e
y
δ
y = fal (e,α,δ)
y = e/(δ^(1-α))
Figura 2.3 Función no lineal y
lineal 𝟎 < 𝜶 < 𝟏
Error pequeño
Ganancia grande
Error grande
Ganancia
pequeña
Error pequeño
Ganancia Lineal
Error grande
Ganancia
pequeña
Por su lado, Tabla 2.3 presenta la función del error cuando (𝛼 > 1).
Tabla 2.3 Características de 𝛼 y 𝛿 en el NPID (𝛼 > 1)
𝛿 = 0 𝛿 > 0
1 e
y
y = fal (e,α,δ)
y = e/(δ^(1-α))
Figura 2.4 Función no lineal 𝜶 > 𝟏
e
y
δ
y = fal (e,α,δ)
y = e/(δ^(1-α))
Figura 2.5 Función no lineal y
lineal 𝜶 > 𝟏
Error pequeño
Ganancia pequeña
Error grande
Ganancia grande
Error pequeño
Ganancia Lineal
Error grande
Ganancia grande
La Figura 2.2 y la Figura 2.3 muestran la función del error cuando 𝛼 está entre 0 y 1, bajo
esta condición, cuando la función es puramente no lineal, el controlador presentará una
ganancia pequeña cuando el error es grande y una ganancia grande cuando el error es
38
pequeño, mientras que si se le agrega una zona lineal a la función (𝛿 > 0), esta última
condición se invierte haciendo que cuando el error es pequeño la ganancia sea también
pequeña (lineal). Por lo tanto, el controlador es insensible a errores pequeños.
Por otro lado, tomando en cuenta la Figura 2.4 cuando 𝛼 es mayor a 1, con la función
puramente no lineal, si el error es grande la ganancia también lo será, y si el error es
pequeño la ganancia también, para cambiar esta última condición se agrega la zona lineal
a la función (𝛿 > 0) como se muestra en la Figura 2.5; haciendo que la ganancia sea grande
(lineal) cuando el error es pequeño. Para este caso, el controlador resulta ser más sensible
ante errores pequeños.
2.5 Diseño de controlador DSMC
La característica de este controlador es la presencia del filtro de primer orden. Al colocarlo
en el numerador y denominador del modelo FOPDT (Ecuación 1.15), la planta queda de la
siguiente manera:
𝐺𝑝(𝑠) = 𝑘 (𝑡𝑓𝑠 + 1
𝜏𝑠 + 1) (
𝑒−𝑡0𝑠
𝑡𝑓𝑠 + 1)
Ecuación 2.15. Modelo FOPDT con filtro
En donde se puede distinguir la parte invertible (Ecuación 2.16) y la no invertible del modelo
(Ecuación 2.17).
𝐺𝑝(𝑠)− =
𝑌𝑚−(𝑠)
𝑈(𝑠)= 𝑘 (
𝑡𝑓𝑠 + 1
𝜏𝑠 + 1)
Ecuación 2.16. Parte invertible del modelo FOPDT
𝐺𝑝(𝑠)+ =
𝑌𝑚+(𝑠)
𝑈(𝑠)= (
𝑒−𝑡0𝑠
𝑡𝑓𝑠 + 1)
Ecuación 2.17. Parte no invertible del modelo FOPDT
Como se había mencionado, este controlador parte del SMC, por lo tanto, para su
desarrollo se empieza por definir la superficie deslizante. Se utiliza una superficie
presentada por Proaño, en [46], que es función del error formada por una parte proporcional
y una integral:
𝑆𝑢(𝑡) = 𝑒−(𝑡) + 𝜆∫𝑒(𝑡)𝑑𝑡
Ecuación 2.18. Superficie deslizante
Tomando en cuenta que 𝑒−(𝑡) se define de la siguiente manera:
𝑒−(𝑡) = 𝑟(𝑡) − 𝑌𝑚−(𝑡)
Ecuación 2.19. Error de la parte invertible
39
La Ecuación 2.19 se reemplaza en la Ecuación 2.18:
𝑆𝑢(𝑡) = 𝑟(𝑡) − 𝑌𝑚−(𝑡) + 𝜆∫𝑒(𝑡)𝑑𝑡
Ecuación 2.20. Superficie deslizante con definición del error de la parte invertible
Para cumplir la condición de deslizamiento se reemplaza la derivada de la Ecuación 2.20
en la Ecuación 1.14, en donde se define que la derivada de la superficie debe ser cero para
cumplir con la condición.
𝑆�̇�(𝑡) = �̇�(𝑡) − �̇�𝑚−(𝑡) + 𝜆𝑒(𝑡) = 0
Ecuación 2.21. Derivada de la superficie
Se despeja la derivada de la parte invertible, obteniéndose la Ecuación 2.22
�̇�𝑚−(𝑡) = �̇�(𝑡) + 𝜆𝑒(𝑡)
Ecuación 2.22. Derivada de la parte invertible
Por otro lado, este controlador utiliza únicamente la parte invertible del modelo, misma que,
se encuentra representada en la Ecuación 2.16. Dicha ecuación debe ser expresada como
ecuación diferencial, quedando de la siguiente manera:
𝜏�̇�𝑚−(𝑡) + 𝑌𝑚
−(𝑡) = 𝑘𝑡𝑓�̇�(𝑡) + 𝑘𝑈(𝑡)
Ecuación 2.23. Parte invertible en el dominio del tiempo
Reemplazando la Ecuación 2.22 en Ecuación 2.23:
𝜏�̇�(𝑡) + 𝜏𝜆𝑒(𝑡) + 𝑌𝑚−(𝑡) = 𝑘𝑡𝑓�̇�(𝑡) + 𝑘𝑈(𝑡)
Para obtener la parte continua de la ley de control se despeja la derivada de la variable de
control.
�̇�𝐶(𝑡) =𝜏
𝑘𝑡𝑓�̇�(𝑡) +
𝜏𝜆
𝑘𝑡𝑓𝑒(𝑡) +
1
𝑘𝑡𝑓𝑌𝑚−(𝑡) −
1
𝑡𝑓𝑈𝑐(𝑡)
Ecuación 2.24 Derivada de la parte continua de la ley de control.
La parte discontinua de la ley de control está dada por la Ecuación 2.25.
�̇�𝐷(𝑡) = 𝐾𝐷𝑠𝑖𝑔𝑛(𝑆𝑢(𝑡))
Ecuación 2.25 Derivada de la parte discontinua de la ley de control
Se tiene la ley de control mediante la suma de las dos partes:
�̇�(𝑡) =𝜏
𝑘𝑡𝑓�̇�(𝑡) +
𝜏𝜆
𝑘𝑡𝑓𝑒(𝑡) +
1
𝑘𝑡𝑓𝑌𝑚−(𝑡) −
1
𝑡𝑓𝑈𝑐(𝑡) + 𝐾𝐷𝑠𝑖𝑔𝑛(𝑆𝑢(𝑡))
40
Después de realizar varias pruebas en el diseño realizado se observó que el término de la
derivada de la referencia inserta un pulso inicial en la ley de control, pero al retirarlo se
conserva la misma respuesta en la salida del sistema por lo cual se procede a eliminar este
término tomando en cuenta que la derivada de una constante es cero. Finalmente se
obtiene la ley de control del DSMC en la Ecuación 2.26, como 𝑈(𝑡) = 𝑈𝐷𝑆𝑀𝐶(𝑡).
𝑈𝐷𝑆𝑀𝐶(𝑡) =𝜏𝜆
𝑘𝑡𝑓∫𝑒(𝑡) +
1
𝑘𝑡𝑓∫𝑌𝑚
−(𝑡) −1
𝑡𝑓∫𝑈𝑐(𝑡) + ∫𝐾𝐷𝑠𝑖𝑔𝑛(𝑆𝑢(𝑡))
Ecuación 2.26 Ley de control DSMC
Para la sintonización de las variables a partir de [54] se tiene que,
𝐾𝐷 = 𝑘10.51
|𝑘|[𝜏
𝑡0]0.76
𝜆 = 𝑘2 ∙𝜏 + 𝑡0𝜏 ∙ 𝑡0
Ecuación 2.27 Fórmulas de sintonización DSMC
𝑘1, 𝑘2 son constantes de sintonización proporcionales que deben ser encontradas de
acuerdo con el requerimiento de respuesta de la planta, heurísticamente.
Y dado que |𝑆(𝑡)| siempre debe ser positivo, el valor de 𝑡𝑓 debe cumplir que:
𝑡𝑓 > 0
2.6 Diseño de controlador de matriz dinámica
Para el diseño del DMC se utiliza tres elementos importantes: el modelo de la planta, la
función objetivo y el algoritmo para encontrar la ley de control. A continuación, se explica
cómo obtener la secuencia óptima de control a partir de la salida que se predice en base
al modelo ante una entrada escalón.
La respuesta predicha �̂� de la Ecuación 1.18 se divide en:
�̂�(𝑡 + 𝑘|𝑡) =∑𝑠𝑖 ∆𝑢(𝑡 + 𝑘 − 𝑖)
𝑘
𝑖=1
+ ∑ 𝑠𝑖∆𝑢(𝑡 + 𝑘 − 𝑖)
∞
𝑖=𝑘+1
+ �̂�
Donde �̂� es la respuesta debida a perturbaciones constantes y depende de 𝑦𝑚, que es la
respuesta medida, y �̂�(𝑡|𝑡), que es el valor de la predicción en el periodo de muestreo
actual.
�̂� = 𝑦𝑚 − �̂�(𝑡|𝑡)
Ecuación 2.28 Respuesta debido a las perturbaciones
41
Se puede reescribir la respuesta predicha, la cual se encuentra dividida en la respuesta
forzada (𝑦𝑓) y la respuesta libre (𝑦𝑙).
�̂�(𝑡 + 𝑘|𝑡) =∑𝑠𝑖∆𝑢(𝑡 + 𝑘 − 𝑖)
𝑘
𝑖=1
+ 𝑦𝑚(𝑡) + ∑ 𝑠𝑖
∞
𝑖=𝑘+1
∆𝑢(𝑡 + 𝑘 − 𝑖) −∑𝑠𝑖∆𝑢(𝑡 − 𝑖)
∞
𝑖=1
La respuesta forzada no depende de las salidas pasadas, pero sí de las acciones de control
futuras.
𝑦𝑓(𝑡 + 𝑘) =∑𝑠𝑖∆𝑢(𝑡 + 𝑘 − 𝑖)
𝑘
𝑖=1
= 𝑆∆u
Ecuación 2.29 Respuesta forzada
Donde 𝑆 es la matriz dinámica.
𝑆 =
[ 𝑠1 0 ⋯ 0
𝑠2 𝑠1 ⋯ 0
⋮ ⋮ ⋱ ⋮
𝑠𝐻𝑐 𝑠𝐻𝑐−1 ⋯ 𝑠1𝑠𝐻𝑐+1 𝑠𝐻𝑐 ⋯ 𝑠2⋮ ⋮ ⋱ ⋮
𝑠𝐻𝑝 𝑠𝐻𝑝−1 ⋯ 𝑠𝐻𝑝−𝐻𝑐+1]
(𝐻𝑝𝑥 𝐻𝑐)
Ecuación 2.30 Matriz dinámica
Donde:
𝐻𝑝: es el horizonte de predicción.
𝐻𝑐 : es el horizonte de control.
El horizonte de predicción es el tiempo en número de muestras hasta el que se predecirá
la salida, es decir, que si este valor es muy alto se tendrá una predicción más a futuro, y
debe ser al menos mayor al tiempo de establecimiento de la planta. Mientras que, el
horizonte de control se refiere a cuántos cambios puede tener la señal de control para llegar
a la salida predicha, lo que significa que la secuencia de control será de la longitud de este
parámetro, y para su escogimiento se debe considerar el actuador y velocidad de
funcionamiento, además que se evite la existencia de chattering, además se debe tomar
en cuenta que, mientras más alto el valor de este horizonte de control mayor carga
computacional se necesita.
La respuesta libre es aquella que no depende de las acciones de control futuras.

42
𝑦𝑙(𝑡 + 𝑘) = 𝑦𝑚(𝑡) + ∑ 𝑠𝑖∆𝑢(𝑡 + 𝑘 − 𝑖)
∞
𝑖=𝑘+1
−∑𝑠𝑖∆𝑢(𝑡 − 𝑖)
∞
𝑖=1
= 𝑦𝑚(𝑡) +∑(𝑠𝑘+𝑖 − 𝑠𝑖)∆𝑢(𝑡 − 𝑖)
∞
𝑖=1
Ecuación 2.31 Respuesta libre
Tomando en cuenta la Ecuación 2.29 y la Ecuación 2.31, se puede expresar la salida
predicha de forma matricial.
�̂� = 𝑦𝑙 + 𝑆∆u
Ecuación 2.32 Respuesta predicha
Sustituyendo la respuesta predicha obtenida en la Ecuación 2.32, en la función objetivo de
la Ecuación 1.19 se tiene:
𝑀𝑖𝑛𝑖𝑚𝑖𝑧𝑎𝑟∆𝑈
𝐽(∆𝑈) = (𝑟 − 𝑦𝑙 − 𝑆∆𝑈)𝑇𝑄(𝑟 − 𝑦𝑙 − 𝑆∆𝑈) + ∆𝑈
𝑇𝑅∆𝑈
Luego, se define el error de la siguiente manera [58]:
𝐸(𝑘) = 𝑟 − 𝑦𝑙
Ecuación 2.33. Error en DMC [58]
De ahí que, la función objetivo es:
𝑀𝑖𝑛𝑖𝑚𝑖𝑧𝑎𝑟∆u
𝐽(∆𝑈) = 𝐸(𝑘)𝑇𝑄𝐸(𝑘) − 2∆𝑈𝑇𝑆𝑇𝑄𝐸(𝑘) + ∆𝑈 𝑇(𝑆𝑇QS + R) ∆𝑈
El primer término es considerado constante quedando así:
𝑀𝑖𝑛𝑖𝑚𝑖𝑧𝑎𝑟∆u
𝐽(∆𝑈) = 𝑐𝑜𝑛𝑠𝑡 − ∆𝑈𝑇𝐺 + ∆𝑈 𝑇H ∆𝑈
Ecuación 2.34 Función objetivo simplificada Donde:
𝐺 = 2𝑆𝑇𝑄𝐸(𝑘)
𝐻 = 𝑆𝑇𝑄𝑆 + 𝑅
Para obtener la secuencia de control en el algoritmo predictivo se debe encontrar una
solución analítica minimizando la función objetivo descrita a continuación.
𝜕𝐽
𝜕∆𝑈= −𝐺 + 2𝐻∆𝑈 = 0
La secuencia óptima para la función objetivo sin considerar restricciones se obtendrá a
partir de:

43
∆𝑈 =1
2𝐻−1𝐺
Ecuación 2.35 Solución de la función objetivo sin restricciones Como,
∆𝑈(𝑡) = 𝑢(𝑡|𝑡) + 𝑢(𝑡 − 1)
Se tiene la secuencia de control a partir de despejar 𝑢(𝑡|𝑡).
Dado que ésta es una estrategia de horizonte deslizante, de la secuencia obtenida se toma
el primer valor y se vuelve a realizar el cálculo para el siguiente periodo de muestreo.
La ley de control aplicada en el instante actual será la suma de la variación del control en
dicho instante ∆𝑈(𝑡) y el valor del control que se aplicó en el instante anterior 𝑢(𝑡 − 1)
𝑢𝐷𝑀𝐶 = 𝑢(𝑡|𝑡) = ∆𝑈(𝑡) + 𝑢(𝑡 − 1)
Ecuación 2.36 Ley de control DMC
La secuencia de control obtenida para el controlador es:
𝑢(𝑡 + 𝑘|𝑡) = ∑∆𝑢(𝑡 + 𝑖)
𝐻𝑐
𝑖=0
+ 𝑢(𝑖 − 1)
Ecuación 2.37. Secuencia de control óptima
Siempre que se requiera introducir limitaciones en la solución, a diferencia de la solución
analítica encontrada se debe resolver el problema de la función objetivo (Ecuación 2.34)
considerando restricciones al cual se lo conoce como un problema de programación
cuadrática (QP).
El problema QP es un tipo de optimización cuya función objetivo es cuadrática y se
encuentra sujeta a restricciones [64]. En la Ecuación 2.38 se observa el problema QP.
𝑀𝑖𝑛𝑖𝑚𝑖𝑧𝑎𝑟𝑥
𝑓(𝑥) = 1
2𝑥 𝑇𝐻 𝑥 − 𝑥𝑇𝐺
𝐴𝑥 ≤ 𝑎
𝐵𝑥 = 𝑏
𝑙𝑏 ≤ 𝑥 ≤ 𝑢𝑏
Ecuación 2.38. Problema QP
Donde: 𝐻 ∈ 𝑅𝑛𝑥𝑛, 𝐺 ∈ 𝑅𝑚𝑥𝑛
Las inecuaciones definen una región dentro de la cual se encuentra una solución factible
de manera que se cumplan las restricciones [3].

44
En ciertos casos dicha región es un conjunto vacío, lo que significa que el problema no es
factible, esto se puede dar debido a que las restricciones que se implementan en búsqueda
de ciertas características de control son muy estrictas, o a que las perturbaciones llevan el
sistema a una región que no está permitida y, por lo cual, no es posible encontrar una
secuencia de control óptima [65].
El software MATLAB para resolver el problema QP utiliza la función quadprog.m, y en la
misma se permite el ingreso de restricciones de igualdad o desigualdad.
Volviendo a la función objetivo del DMC, que se indicó en la Ecuación 2.34 y que es un
problema QP, en este caso dado que la variable a minimizar es ∆𝑢, se debe poner las
mencionadas restricciones como inecuaciones de esta variable para poder resolver el
problema en el software MATLAB.
A partir de la restricción de control de la Ecuación 1.20 se tiene:
𝑢 ≤ 𝑢𝑚𝑎𝑥
Ecuación 2.39. Restricción positiva de control
Sustituyendo la Ecuación 2.37 en Ecuación 2.39.
∑∆𝑢(𝑡 + 𝑖)
𝐻𝑐
𝑖=0
+ 𝑢(𝑖 − 1) ≤ 𝑢𝑚𝑎𝑥 [1⋮1]
(𝐻𝑐 ×1)
Lo que puede ser expresado en forma vectorial:
𝐹′∆𝑈 ≤ 𝑓′ − 𝐹1′ 𝑢(𝑖 − 1)
Ecuación 2.40. Restricción de control superior
Donde:
𝐹′ = [
1 0 0 ⋯ 01 1 0 ⋯ 0⋮ ⋮ ⋮ ⋱ 01 1 1 ⋯ 1
]
(𝐻𝑐 × 𝐻𝑐)
∆𝑈 = [
∆𝑢𝑖∆𝑢𝑖+1⋮
∆𝑢𝑖+𝐻𝑐−1
]
𝐹1′ = [
1⋮1]
(𝐻𝑐 ×1)

45
𝑓′ = [𝑢𝑚𝑎𝑥⋮
𝑢𝑚𝑎𝑥]
(𝐻𝑐 ×1)
Para la otra parte de la Ecuación 1.20 se sustituye la Ecuación 2.41 en la Ecuación 2.37.
𝑢𝑚𝑖𝑛 ≤ 𝑢
Ecuación 2.41. Restricción negativa de control
𝑢𝑚𝑖𝑛 [1⋮1]
(𝐻𝑐 ×1)
≤∑∆𝑢(𝑡 + 𝑖)
𝐻𝑐
𝑖=0
+ 𝑢(𝑖 − 1)
−∑∆𝑢(𝑡 + 𝑖)
𝐻𝑐
𝑖=0
≤ −𝑢𝑚𝑖𝑛 − (−𝑢(𝑖 − 1))
Lo que puede escribirse del siguiente modo:
𝐹′′∆𝑈 ≤ 𝑓′′ − 𝐹1′′ 𝑢(𝑖 − 1)
Ecuación 2.42. Restricción de control inferior
Donde:
𝐹′′ = −𝐹′
𝐹1′′ = [
−1⋮−1]
(𝐻𝑐 ×1)
𝑓′′ = [−𝑢𝑚𝑖𝑛⋮
−𝑢𝑚𝑖𝑛]
(𝐻𝑐 ×1)
A partir de la Ecuación 2.40 y Ecuación 2.42, se puede formar la restricción de la ley de
control expresada en función de la variable a minimizar en la función objetivo.
𝐹∆𝑈 ≤ 𝑓 − 𝐹1 𝑢(𝑖 − 1)
Ecuación 2.43. Restricción de control en función de ∆𝑈
Donde:
𝐹 = [𝐹′ 𝐹′′]
𝑓 = [𝑓′
𝑓′′]

46
𝐹1 = [𝐹1′
𝐹1′′]
La restricción de la variación del control como se observa ya se encuentra en función de
∆𝑢 por lo cual sólo se debe reescribir con las matrices correspondientes.
𝛬𝛿𝑚𝑖𝑛 ≤ ∆𝑢 ≤ 𝛬𝛿𝑚𝑎𝑥
Ecuación 2.44. Restricción de la tasa de cambio de control en función de ∆𝑈
Donde:
𝛬 = [1⋮1]
(𝐻𝑐 ×1)
Para la restricción de la salida a partir de la Ecuación 1.22.
�̂� ≤ 𝑦𝑚𝑎𝑥
Se sustituye la respuesta predicha de la Ecuación 2.32
𝑆∆𝑢 ≤ 𝑔′ − 𝑦𝑙
Ecuación 2.45. Restricción de salida superior
Donde:
𝑔′ = [
𝑦𝑚𝑎𝑥⋮
𝑦𝑚𝑎𝑥]
(𝐻𝑝 ×1)
Para extender la inecuación con su respectivo límite inferior se tiene un proceso similar al
realizado para la restricción de control.
𝑔′′ ≤ 𝑦𝑙 + 𝑆∆u
Se opera de modo que la expresión quede en la forma de la Ecuación 2.45 .
−𝑆∆u ≤ −𝑔′′ − (−𝑦𝑙)
Luego se obtiene la Ecuación 2.46 en donde ya se encuentra la restricción completa.
𝑆𝑇∆u ≤ 𝑔 − 𝑦𝑝
Ecuación 2.46. Restricción de salida en función de ∆u
Donde:
𝑆𝑇 = [𝑆
−𝑆 ]

47
𝑔 = [𝑔′
𝑔′′]
𝑦𝑝 = [𝑦𝑙−𝑦𝑙
]
2.7 Interfaz gráfica
En esta sección se realiza el desarrollo de una interfaz gráfica en la cual se muestra de
manera clara y concisa los resultados obtenidos. Está enfocada a usuarios con
conocimientos de diseño de controladores y de páncreas artificial.
La interfaz tendrá la funcionalidad descrita en la Figura 2.6, la pantalla principal tendrá dos
opciones, una para acceder a las simulaciones con parámetros nominales y otra para las
simulaciones con escenarios. Las acciones del usuario muestran qué puede realizar el
usuario al ingresar a cada opción, mientras que los resultados enumeran todos los
elementos que se presentarán en la interfaz como resultado de las simulaciones.
Interfaz Gráfica
Pantalla principal
Resultados con parámetros nominales
Opción 1 Opción 2
Simular con los valores preestablecidos
Gráficas de la respuesta de la planta con los controladores
Acciones del usuario
Resultados
Realizar cambios en los parámetros de los
controladores, cantidad de carbohidratos para
perturbaciones y tiempos de simulación y simular
Resetear a los valores preestablecidos
Elegir qué controlador se visualiza
Volver a la pantalla principal
Resultados con escenarios
Simular los controladores con escenarios
Gráficas de la respuesta de la planta con el escenario 1 y el
escenario 2
Acciones del usuario
Resultados
Elegir qué controlador se visualiza Gráficas de la ley de
control
Valores de los índices ISE de los
controladores
Volver a la pantalla principal
Figura 2.6 Descripción interfaz gráfica
48
Dado que el diseño de los controladores fue realizado en el software de MATLAB y con el
propósito de relacionar las variables de forma más efectiva y sencilla, la interfaz es
realizada en el entorno de desarrollo GUIDE (Graphical User Interface Development
Enviroment) que permite la personalización de la interfaz en base a las características del
modelo, los controladores y las perturbaciones.
La interfaz gráfica se distribuye en 3 ventanas: una de presentación, la segunda
correspondiente a las simulaciones con parámetros nominales y una tercera con resultados
en presencia de dos escenarios predeterminados.
La primera ventana, presentada en la Figura 2.7, contiene dos elementos (botones) que
permiten acceder a las 2 ventanas restantes. La lógica que siguen estos elementos se
detalla en los diagramas de flujo de la Figura 2.8.
Figura 2.7 Ventana inicial de la interfaz gráfica
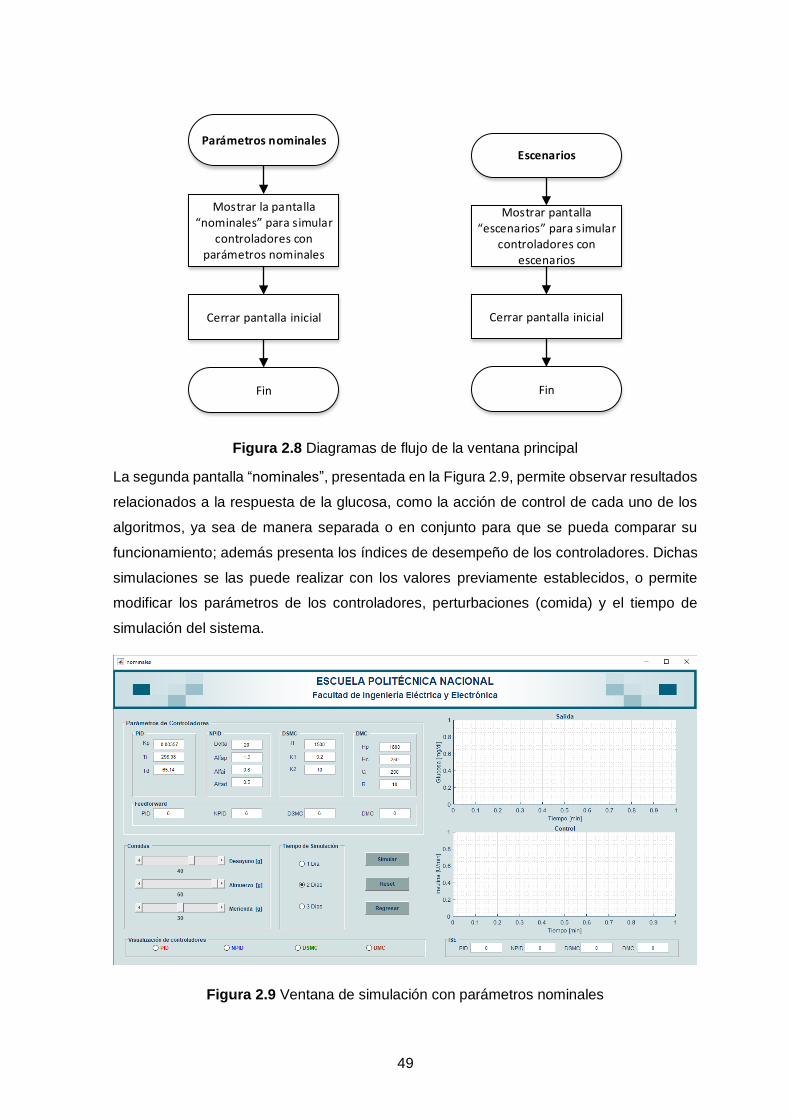
49
Parámetros nominales
Mostrar la pantalla nominales para simular
controladores con parámetros nominales
Cerrar pantalla inicial
Fin
Mostrar pantalla escenarios para simular
controladores con escenarios
Escenarios
Cerrar pantalla inicial
Fin
Figura 2.8 Diagramas de flujo de la ventana principal
La segunda pantalla “nominales”, presentada en la Figura 2.9, permite observar resultados
relacionados a la respuesta de la glucosa, como la acción de control de cada uno de los
algoritmos, ya sea de manera separada o en conjunto para que se pueda comparar su
funcionamiento; además presenta los índices de desempeño de los controladores. Dichas
simulaciones se las puede realizar con los valores previamente establecidos, o permite
modificar los parámetros de los controladores, perturbaciones (comida) y el tiempo de
simulación del sistema.
Figura 2.9 Ventana de simulación con parámetros nominales
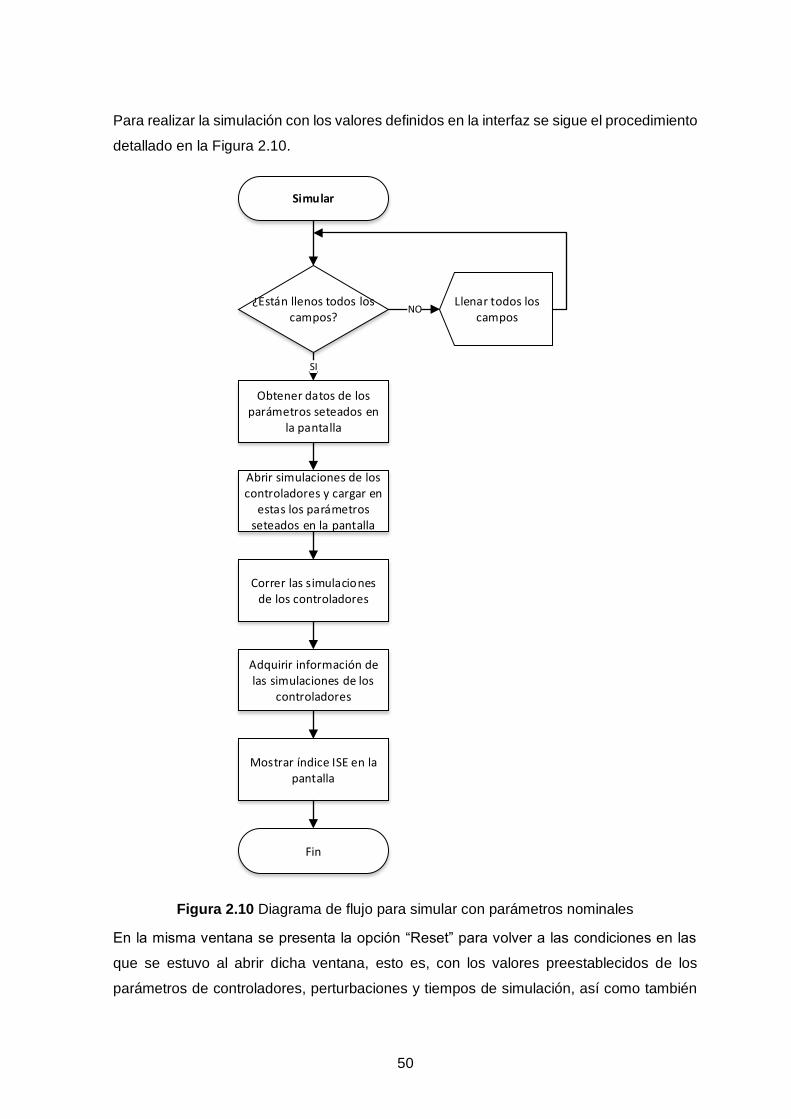
50
Para realizar la simulación con los valores definidos en la interfaz se sigue el procedimiento
detallado en la Figura 2.10.
Obtener datos de los parámetros seteados en
la pantalla
¿Están llenos todos los campos?
Llenar todos los campos
SI
Simular
NO
Abrir simulaciones de los controladores y cargar en
estas los parámetros seteados en la pantalla
Correr las simulaciones de los controladores
Adquirir información de las simulaciones de los
controladores
Mostrar índice ISE en la pantalla
Fin
Figura 2.10 Diagrama de flujo para simular con parámetros nominales
En la misma ventana se presenta la opción “Reset” para volver a las condiciones en las
que se estuvo al abrir dicha ventana, esto es, con los valores preestablecidos de los
parámetros de controladores, perturbaciones y tiempos de simulación, así como también
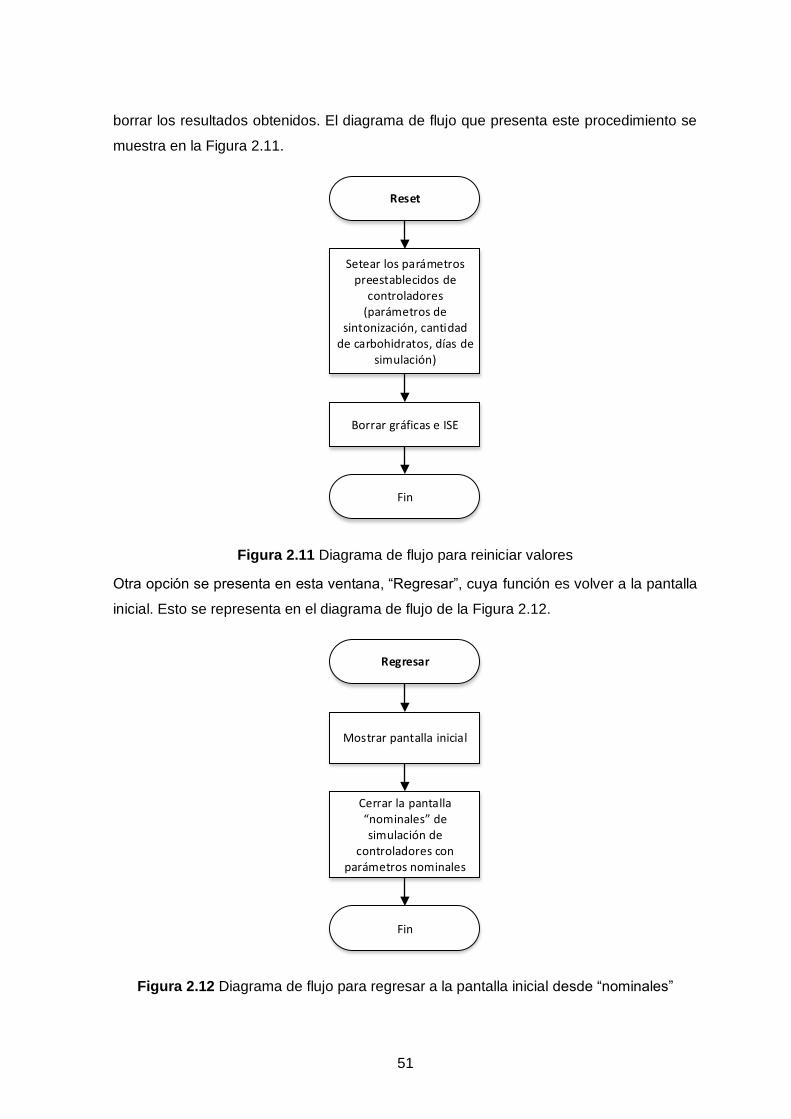
51
borrar los resultados obtenidos. El diagrama de flujo que presenta este procedimiento se
muestra en la Figura 2.11.
Reset
Setear los parámetros preestablecidos de
controladores (parámetros de
sintonización, cantidad de carbohidratos, días de
simulación)
Borrar gráficas e ISE
Fin
Figura 2.11 Diagrama de flujo para reiniciar valores
Otra opción se presenta en esta ventana, “Regresar”, cuya función es volver a la pantalla
inicial. Esto se representa en el diagrama de flujo de la Figura 2.12.
Regresar
Mostrar pantalla inicial
Cerrar la pantalla nominales de simulación de
controladores con parámetros nominales
Fin
Figura 2.12 Diagrama de flujo para regresar a la pantalla inicial desde “nominales”
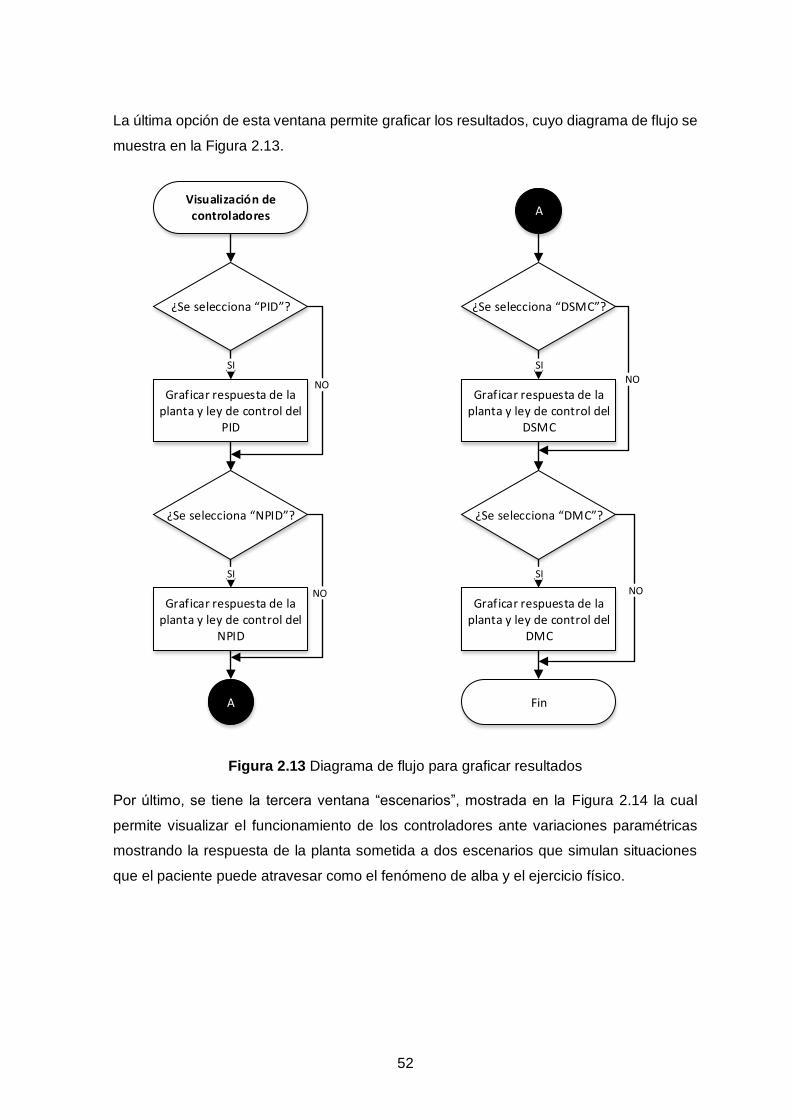
52
La última opción de esta ventana permite graficar los resultados, cuyo diagrama de flujo se
muestra en la Figura 2.13.
¿Se selecciona PID ?
¿Se selecciona NPID ?
Graficar respuesta de la planta y ley de control del
PID
Graficar respuesta de la planta y ley de control del
NPID
Visualización de controladores
SI
SI
NO
NO
¿Se selecciona DSMC ?
¿Se selecciona DMC ?
Graficar respuesta de la planta y ley de control del
DSMC
SI
Graficar respuesta de la planta y ley de control del
DMC
Fin
SI
NO
A
A
NO
Figura 2.13 Diagrama de flujo para graficar resultados
Por último, se tiene la tercera ventana “escenarios”, mostrada en la Figura 2.14 la cual
permite visualizar el funcionamiento de los controladores ante variaciones paramétricas
mostrando la respuesta de la planta sometida a dos escenarios que simulan situaciones
que el paciente puede atravesar como el fenómeno de alba y el ejercicio físico.

53
Figura 2.14 Ventana de simulación con escenarios
Esta ventana, al igual que la anterior tiene una opción de simular, su diagrama de flujo se
muestra a continuación
Simular
Correr las simulaciones de los controladores
Adquirir información de las simulaciones de los
controladores
Fin
Figura 2.15 Diagrama de flujo para simular con escenarios
Una vez simulado se puede escoger que controlador se desea observar los resultados,
esto se encuentra dentro de la opción “Selección de controlador”, que sigue la siguiente
lógica (Figura 2.16).
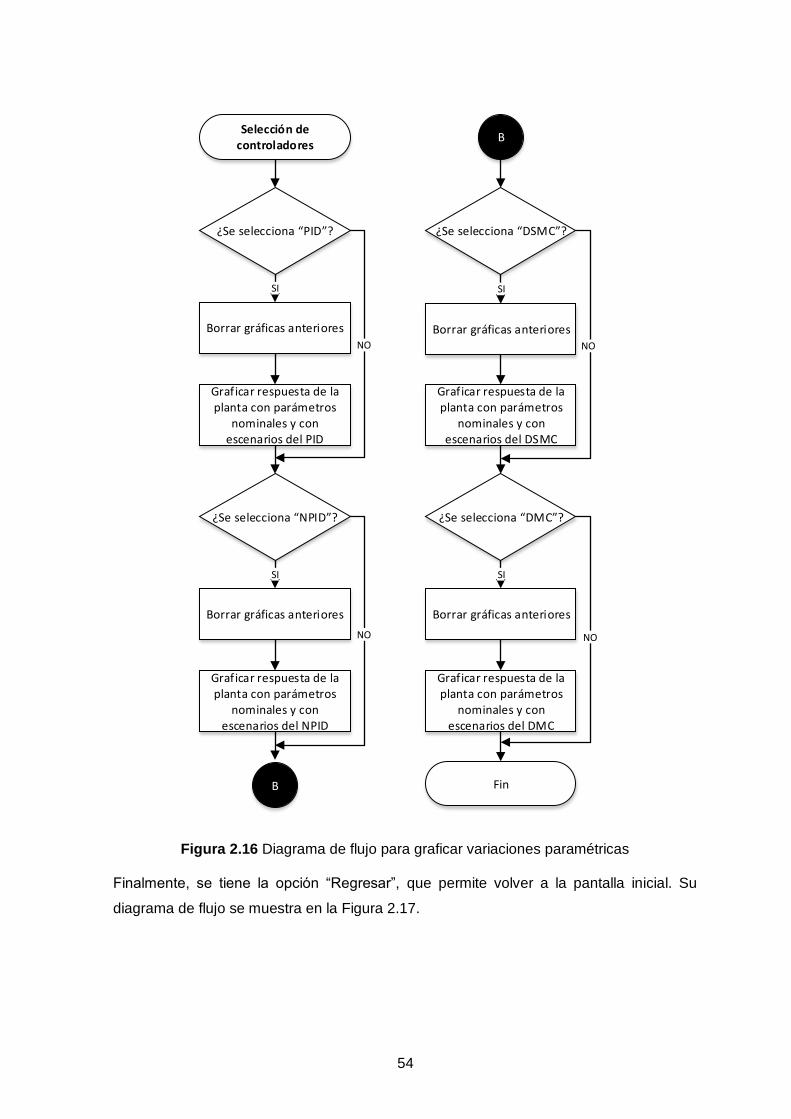
54
¿Se selecciona PID ?
¿Se selecciona NPID ?
Graficar respuesta de la planta con parámetros
nominales y con escenarios del PID
Selección de controladores
SI
SI
Graficar respuesta de la planta con parámetros
nominales y con escenarios del NPID
Borrar gráficas anteriores
Borrar gráficas anteriores
NO
NO
¿Se selecciona DSMC ?
¿Se selecciona DMC ?
SI
SI
Graficar respuesta de la planta con parámetros
nominales y con escenarios del DSMC
Graficar respuesta de la planta con parámetros
nominales y con escenarios del DMC
Borrar gráficas anteriores
Borrar gráficas anteriores
Fin
B
B
NO
NO
Figura 2.16 Diagrama de flujo para graficar variaciones paramétricas
Finalmente, se tiene la opción “Regresar”, que permite volver a la pantalla inicial. Su
diagrama de flujo se muestra en la Figura 2.17.
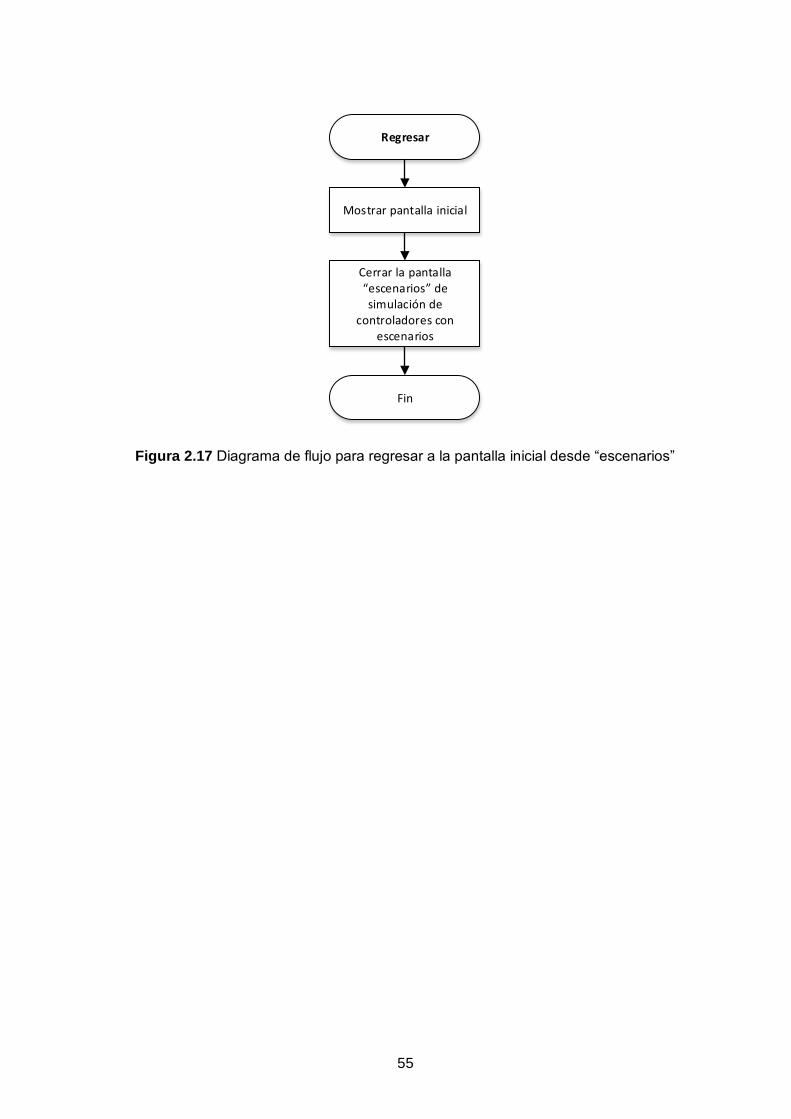
55
Regresar
Mostrar pantalla inicial
Cerrar la pantalla escenarios de simulación de
controladores con escenarios
Fin
Figura 2.17 Diagrama de flujo para regresar a la pantalla inicial desde “escenarios”
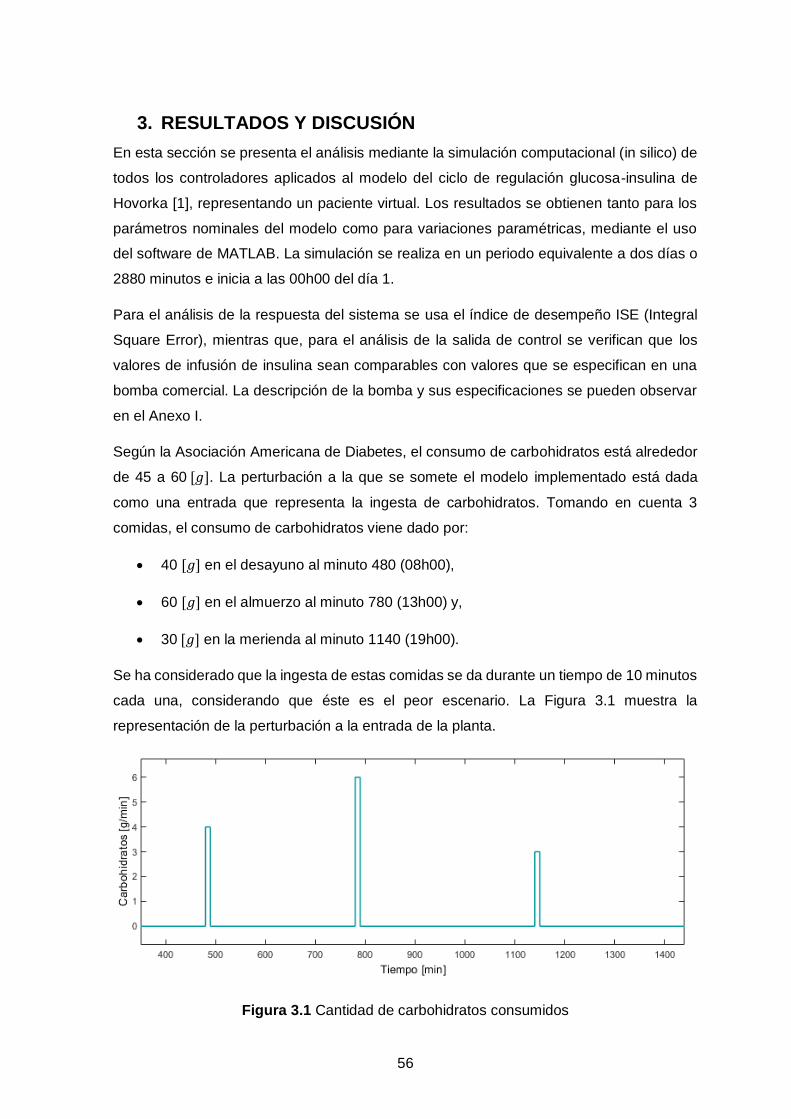
56
3. RESULTADOS Y DISCUSIÓN
En esta sección se presenta el análisis mediante la simulación computacional (in silico) de
todos los controladores aplicados al modelo del ciclo de regulación glucosa-insulina de
Hovorka [1], representando un paciente virtual. Los resultados se obtienen tanto para los
parámetros nominales del modelo como para variaciones paramétricas, mediante el uso
del software de MATLAB. La simulación se realiza en un periodo equivalente a dos días o
2880 minutos e inicia a las 00h00 del día 1.
Para el análisis de la respuesta del sistema se usa el índice de desempeño ISE (Integral
Square Error), mientras que, para el análisis de la salida de control se verifican que los
valores de infusión de insulina sean comparables con valores que se especifican en una
bomba comercial. La descripción de la bomba y sus especificaciones se pueden observar
en el Anexo I.
Según la Asociación Americana de Diabetes, el consumo de carbohidratos está alrededor
de 45 a 60 [𝑔]. La perturbación a la que se somete el modelo implementado está dada
como una entrada que representa la ingesta de carbohidratos. Tomando en cuenta 3
comidas, el consumo de carbohidratos viene dado por:
• 40 [𝑔] en el desayuno al minuto 480 (08h00),
• 60 [𝑔] en el almuerzo al minuto 780 (13h00) y,
• 30 [𝑔] en la merienda al minuto 1140 (19h00).
Se ha considerado que la ingesta de estas comidas se da durante un tiempo de 10 minutos
cada una, considerando que éste es el peor escenario. La Figura 3.1 muestra la
representación de la perturbación a la entrada de la planta.
Figura 3.1 Cantidad de carbohidratos consumidos

57
Por otra parte, para el diseño de los controladores se obtiene, en primer lugar, el modelo
FOPDT del sistema. Para esto, se realizan dos variaciones a la entrada de la planta, una
positiva, del +10%, y una variación negativa, del -10%, obteniéndose los parámetros
necesarios. Finalmente, de los valores obtenidos se utilizará un promedio para obtener el
modelo FOPDT final.
Para el primer caso, se realiza el cambio de entrada escalón hasta 1.013 [𝑈/ℎ], que
representa el 10% de la entrada de la planta cuya condición inicial tiene el valor de 0.921
[𝑈/ℎ], y se obtiene la respuesta mostrada en la Figura 3.2.
Figura 3.2 Respuesta ante variación del +10% a la entrada de la planta
A partir de ésta (Figura 3.2), se calculan los parámetros del modelo FOPDT, teniendo como
resultado los valores mostrados en la Tabla 3.1.
Tabla 3.1 Parámetros del modelo FOPDT del sistema +10%
Parámetro Valor
𝑘 -17.110 [𝑚𝑚𝑜𝑙∙ℎ
𝑙∙𝑈]
t0 131.970 [𝑚𝑖𝑛]
τ 299.490 [𝑚𝑖𝑛]
Por otro lado, al hacer la variación de 0.921 [𝑈/ℎ] a 0.828 [𝑈/ℎ] que representa -10% de
la entrada, la respuesta de la planta es la que se observa en la Figura 3.3.

58
Figura 3.3 Respuesta ante variación del -10% a la entrada de la planta
Y realizando los cálculos para determinar los parámetros del modelo FOPDT, se obtuvieron
los datos mostrados en la Tabla 3.2.
Tabla 3.2 Parámetros del modelo FOPDT del sistema -10%
Parámetro Valor
𝑘 -18.370 [𝑚𝑚𝑜𝑙∙ℎ
𝑙∙𝑈]
t0 129.590 [𝑚𝑖𝑛]
τ 298.460 [𝑚𝑖𝑛]
Finalmente, después de obtener los parámetros de la Tabla 3.1. y de la Tabla 3.2, se realiza
el promedio, obteniéndose los datos presentados en la Tabla 3.3.
Tabla 3.3 Parámetros del modelo FOPDT del sistema
Parámetro Valor
𝑘 -17.910 [𝑚𝑚𝑜𝑙∙ℎ
𝑙∙𝑈]
𝑡0 130.280 [𝑚𝑖𝑛]
𝜏 298.975 [𝑚𝑖𝑛]
Es decir, los parámetros obtenidos muestran que la planta tiene una ganancia estática
negativa, formándose una función de transferencia que representa el modelo FOPDT de la
planta, presentado en la Ecuación 3.1.
𝐺𝑝(𝑠) = −17.910 𝑒−130.280 𝑠
298.975𝑠 + 1
Ecuación 3.1 Modelo FOPDT del modelo de Hovorka
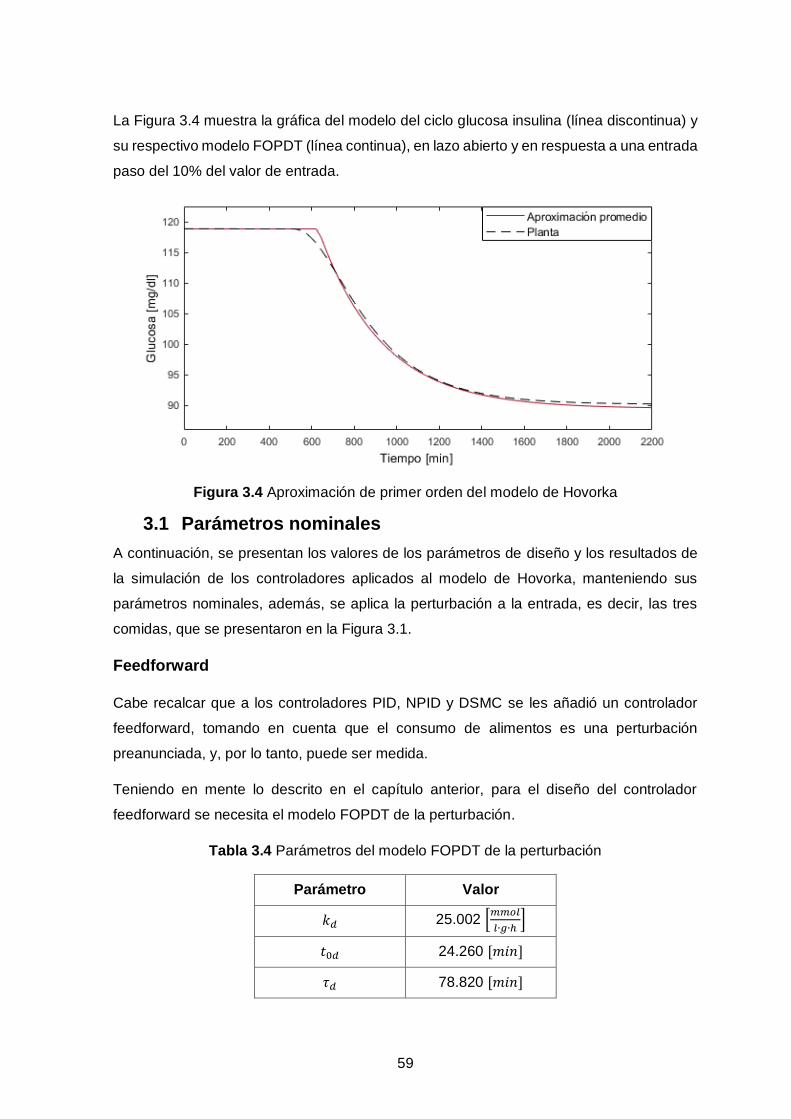
59
La Figura 3.4 muestra la gráfica del modelo del ciclo glucosa insulina (línea discontinua) y
su respectivo modelo FOPDT (línea continua), en lazo abierto y en respuesta a una entrada
paso del 10% del valor de entrada.
Figura 3.4 Aproximación de primer orden del modelo de Hovorka
3.1 Parámetros nominales
A continuación, se presentan los valores de los parámetros de diseño y los resultados de
la simulación de los controladores aplicados al modelo de Hovorka, manteniendo sus
parámetros nominales, además, se aplica la perturbación a la entrada, es decir, las tres
comidas, que se presentaron en la Figura 3.1.
Feedforward
Cabe recalcar que a los controladores PID, NPID y DSMC se les añadió un controlador
feedforward, tomando en cuenta que el consumo de alimentos es una perturbación
preanunciada, y, por lo tanto, puede ser medida.
Teniendo en mente lo descrito en el capítulo anterior, para el diseño del controlador
feedforward se necesita el modelo FOPDT de la perturbación.
Tabla 3.4 Parámetros del modelo FOPDT de la perturbación
Parámetro Valor
𝑘𝑑 25.002 [𝑚𝑚𝑜𝑙
𝑙∙𝑔∙ℎ]
𝑡0𝑑 24.260 [𝑚𝑖𝑛]
𝜏𝑑 78.820 [𝑚𝑖𝑛]

60
𝐺𝐷 = 25.002 𝑒−24.260 𝑠
78.820𝑠 + 1
Ecuación 3.2 Aproximación calculada de FOPDT de los carbohidratos
Con los datos anteriores se obtuvo la ganancia del controlador feedforward, sin embargo,
se realiza una resintonización, mediante prueba y error, hasta encontrar un valor que
realice un mejor desempeño ante perturbaciones de comida. Este nuevo valor es el
utilizado conjuntamente a los controladores PID, NPID y DSMC, mismos que se muestran
más adelante.
Tabla 3.5 Parámetros del controlador feedforward
Parámetro de diseño Valor calculado Valor sintonizado
𝐾𝑓𝑓 1.400 [𝑈
𝑔∙ℎ2] 6 [
𝑈
𝑔∙ℎ2]
PID
Para el caso del controlador PID, utilizando la sintonización de Dahlin, se obtiene los
valores correspondientes a la parte proporcional, integral y derivativa del controlador,
pudiendo completar las incógnitas de la Ecuación 2.10. Se obtienen los valores
presentados en la Tabla 3.6.
Tabla 3.6 Parámetros de diseño controlador PID
Parámetro de
diseño Valor
𝑘𝑝 -3.571x10-3 [𝑚𝑔
𝑑𝑙/𝑈
ℎ]
𝑇𝑖 298.975 [𝑚𝑖𝑛]
𝑇𝑑 65.140 [𝑚𝑖𝑛]
𝑚𝑃𝐼𝐷(𝑡) = 0.921 − 3.571𝑥10−3 [𝑒(𝑡) +1
298.975∙ ∫ 𝑒(𝑡) + 65.140 ∙
𝑑𝑒(𝑡)
𝑑𝑡]
Ecuación 3.3 Ley de control PID aplicada al modelo
Al simular este controlador junto a la planta, durante 2880 minutos, se obtiene la respuesta
mostrada en la Figura 3.5, en ésta se evidencia que el PID llega a presentar hipoglucemia
entre el minuto 1000 y 1200, aproximadamente, llegando hasta 59 [𝑚𝑔/𝑑𝑙]; sin embargo,
fuera de este intervalo de tiempo, se presenta un comportamiento adecuado ya que
permanece dentro de los límites de normoglucemia.
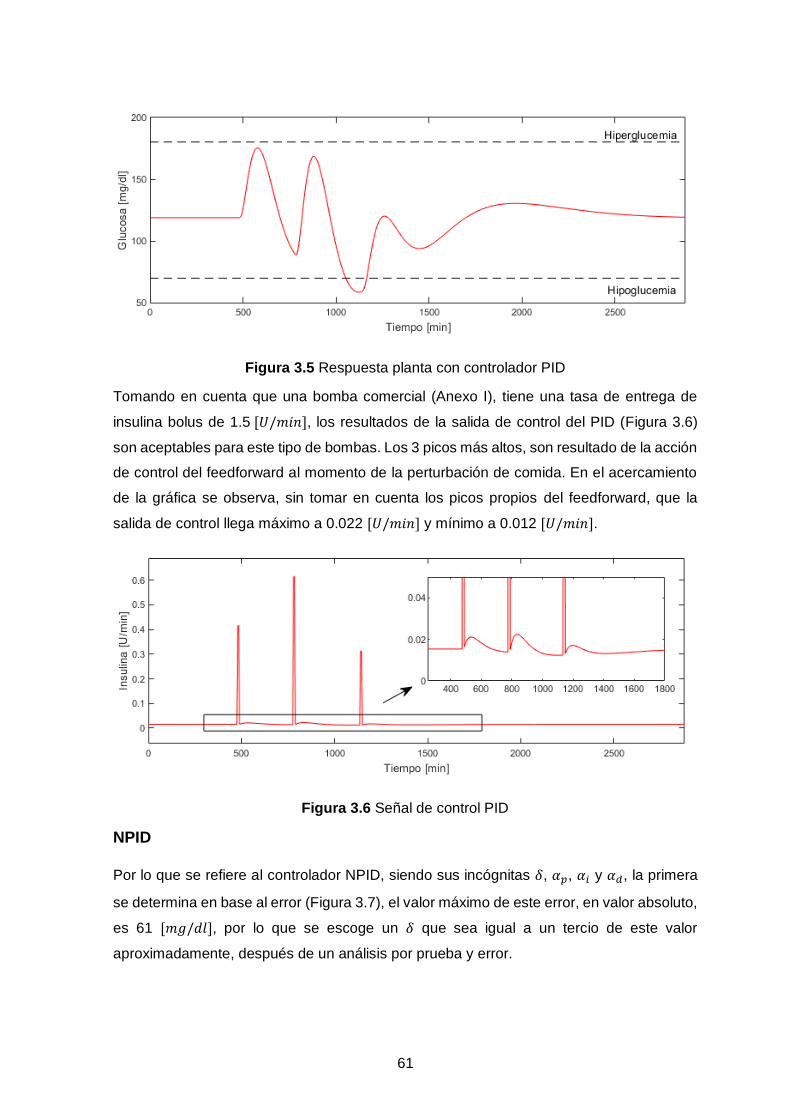
61
Figura 3.5 Respuesta planta con controlador PID
Tomando en cuenta que una bomba comercial (Anexo I), tiene una tasa de entrega de
insulina bolus de 1.5 [𝑈/𝑚𝑖𝑛], los resultados de la salida de control del PID (Figura 3.6)
son aceptables para este tipo de bombas. Los 3 picos más altos, son resultado de la acción
de control del feedforward al momento de la perturbación de comida. En el acercamiento
de la gráfica se observa, sin tomar en cuenta los picos propios del feedforward, que la
salida de control llega máximo a 0.022 [𝑈/𝑚𝑖𝑛] y mínimo a 0.012 [𝑈/𝑚𝑖𝑛].
Figura 3.6 Señal de control PID
NPID
Por lo que se refiere al controlador NPID, siendo sus incógnitas 𝛿, 𝛼𝑝, 𝛼𝑖 y 𝛼𝑑, la primera
se determina en base al error (Figura 3.7), el valor máximo de este error, en valor absoluto,
es 61 [𝑚𝑔/𝑑𝑙], por lo que se escoge un 𝛿 que sea igual a un tercio de este valor
aproximadamente, después de un análisis por prueba y error.
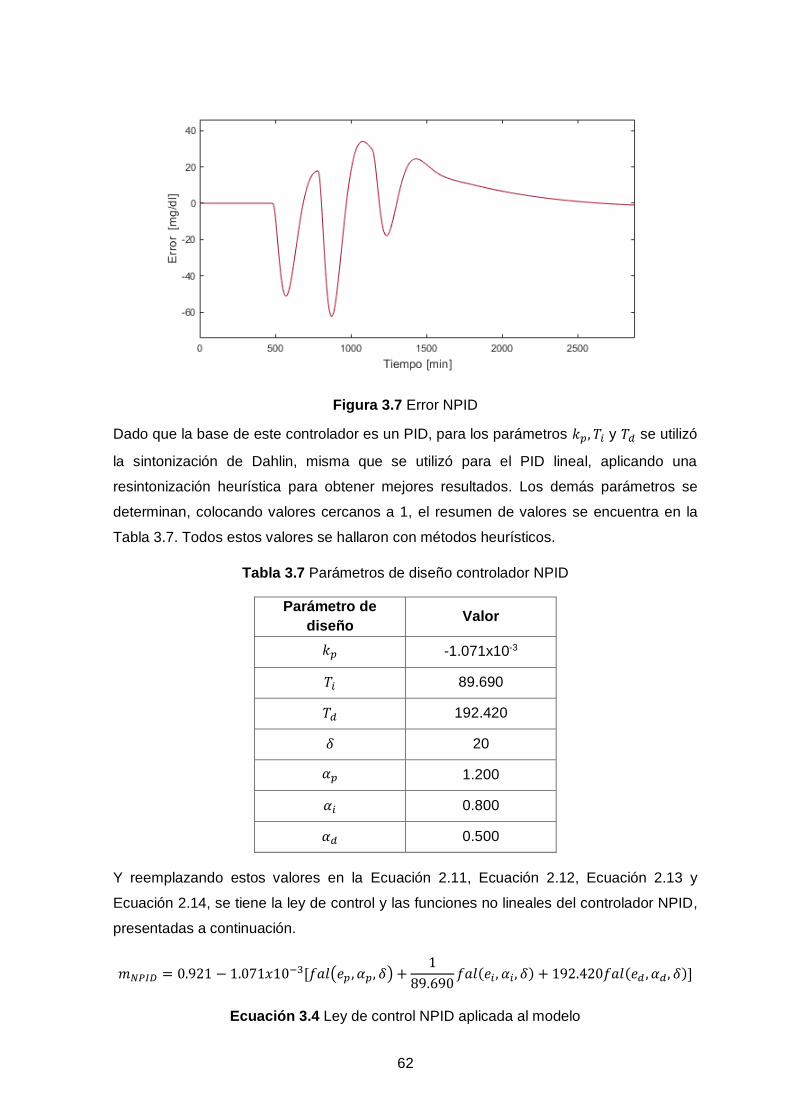
62
Figura 3.7 Error NPID
Dado que la base de este controlador es un PID, para los parámetros 𝑘𝑝, 𝑇𝑖 y 𝑇𝑑 se utilizó
la sintonización de Dahlin, misma que se utilizó para el PID lineal, aplicando una
resintonización heurística para obtener mejores resultados. Los demás parámetros se
determinan, colocando valores cercanos a 1, el resumen de valores se encuentra en la
Tabla 3.7. Todos estos valores se hallaron con métodos heurísticos.
Tabla 3.7 Parámetros de diseño controlador NPID
Parámetro de
diseño Valor
𝑘𝑝 -1.071x10-3
𝑇𝑖 89.690
𝑇𝑑 192.420
𝛿 20
𝛼𝑝 1.200
𝛼𝑖 0.800
𝛼𝑑 0.500
Y reemplazando estos valores en la Ecuación 2.11, Ecuación 2.12, Ecuación 2.13 y
Ecuación 2.14, se tiene la ley de control y las funciones no lineales del controlador NPID,
presentadas a continuación.
𝑚𝑁𝑃𝐼𝐷 = 0.921 − 1.071𝑥10−3[𝑓𝑎𝑙(𝑒𝑝 , 𝛼𝑝, 𝛿) +1
89.690𝑓𝑎𝑙(𝑒𝑖 , 𝛼𝑖, 𝛿) + 192.420𝑓𝑎𝑙(𝑒𝑑 , 𝛼𝑑 , 𝛿)]
Ecuación 3.4 Ley de control NPID aplicada al modelo
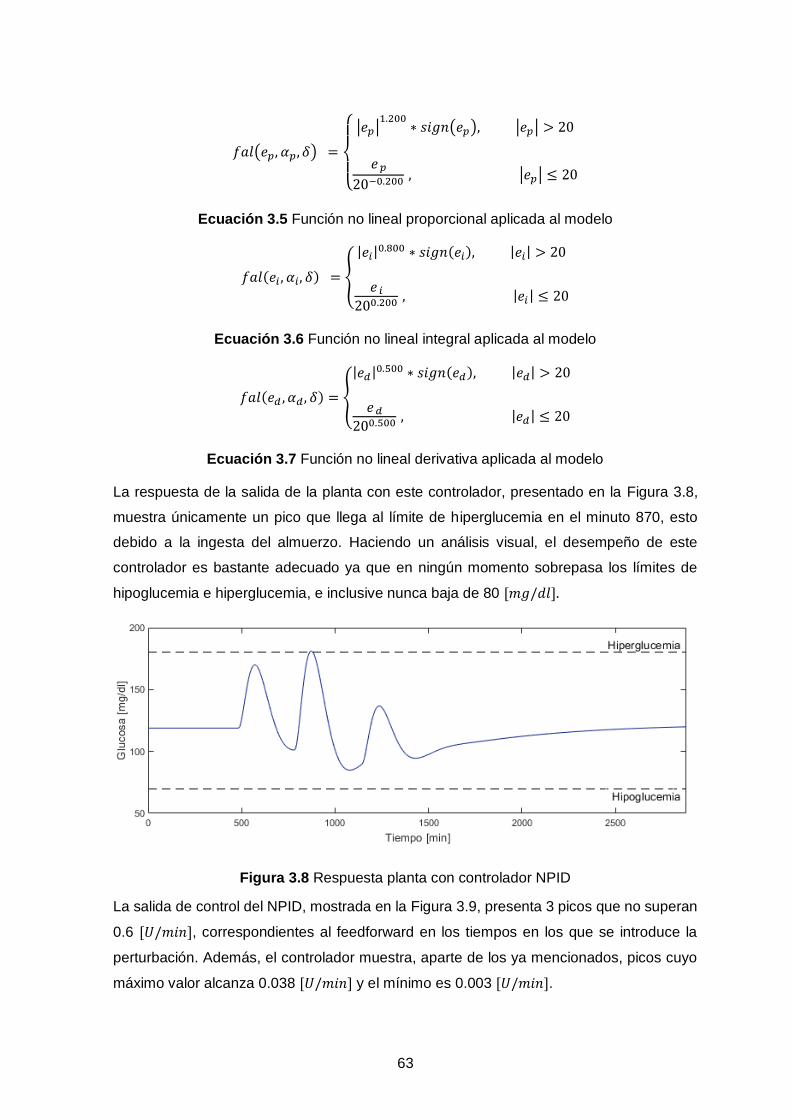
63
𝑓𝑎𝑙(𝑒𝑝, 𝛼𝑝, 𝛿) =
{
|𝑒𝑝|
1.200∗ 𝑠𝑖𝑔𝑛(𝑒𝑝), |𝑒𝑝| > 20
𝐵𝑒𝑝
20−0.200 , |𝑒𝑝| ≤ 20
Ecuación 3.5 Función no lineal proporcional aplicada al modelo
𝑓𝑎𝑙(𝑒𝑖 , 𝛼𝑖, 𝛿) = {
|𝑒𝑖|0.800 ∗ 𝑠𝑖𝑔𝑛(𝑒𝑖), |𝑒𝑖| > 20𝐵𝑒 𝑖
200.200 , |𝑒𝑖| ≤ 20
Ecuación 3.6 Función no lineal integral aplicada al modelo
𝑓𝑎𝑙(𝑒𝑑 , 𝛼𝑑 , 𝛿) = {
|𝑒𝑑|0.500 ∗ 𝑠𝑖𝑔𝑛(𝑒𝑑), |𝑒𝑑| > 20
𝐵𝑒𝑑
200.500 , |𝑒𝑑| ≤ 20
Ecuación 3.7 Función no lineal derivativa aplicada al modelo
La respuesta de la salida de la planta con este controlador, presentado en la Figura 3.8,
muestra únicamente un pico que llega al límite de hiperglucemia en el minuto 870, esto
debido a la ingesta del almuerzo. Haciendo un análisis visual, el desempeño de este
controlador es bastante adecuado ya que en ningún momento sobrepasa los límites de
hipoglucemia e hiperglucemia, e inclusive nunca baja de 80 [𝑚𝑔/𝑑𝑙].
Figura 3.8 Respuesta planta con controlador NPID
La salida de control del NPID, mostrada en la Figura 3.9, presenta 3 picos que no superan
0.6 [𝑈/𝑚𝑖𝑛], correspondientes al feedforward en los tiempos en los que se introduce la
perturbación. Además, el controlador muestra, aparte de los ya mencionados, picos cuyo
máximo valor alcanza 0.038 [𝑈/𝑚𝑖𝑛] y el mínimo es 0.003 [𝑈/𝑚𝑖𝑛].
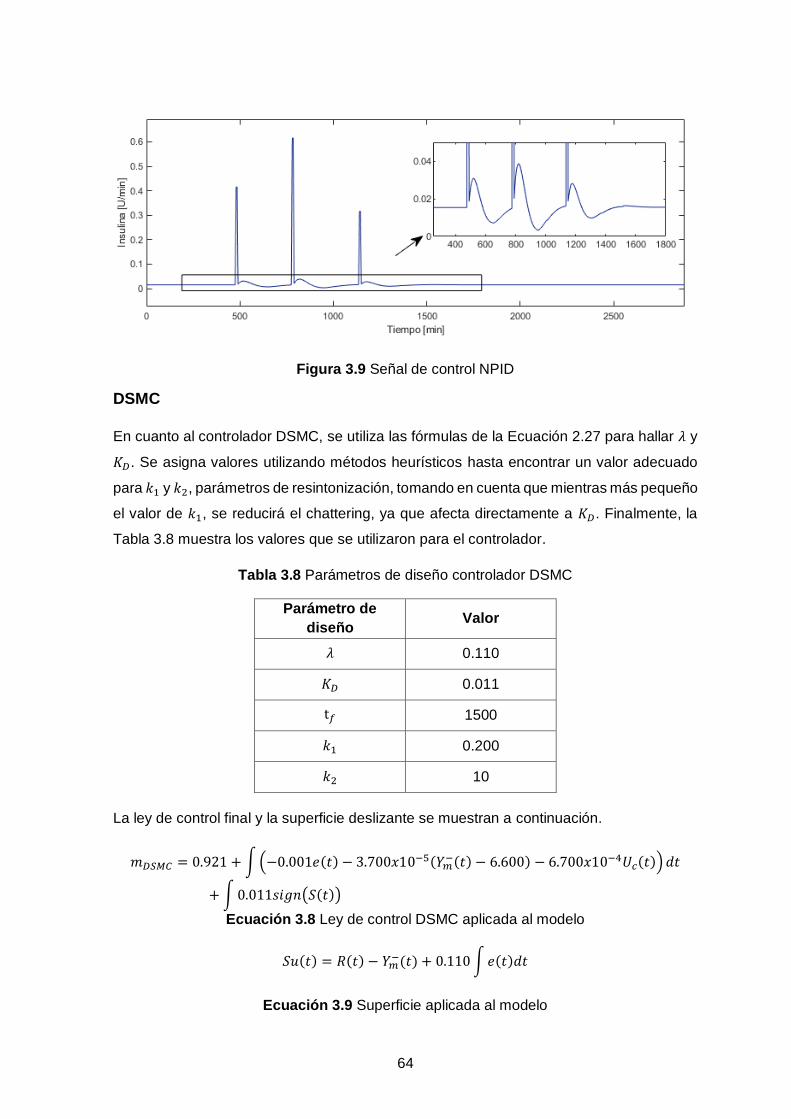
64
Figura 3.9 Señal de control NPID
DSMC
En cuanto al controlador DSMC, se utiliza las fórmulas de la Ecuación 2.27 para hallar 𝜆 y
𝐾𝐷. Se asigna valores utilizando métodos heurísticos hasta encontrar un valor adecuado
para 𝑘1 y 𝑘2, parámetros de resintonización, tomando en cuenta que mientras más pequeño
el valor de 𝑘1, se reducirá el chattering, ya que afecta directamente a 𝐾𝐷. Finalmente, la
Tabla 3.8 muestra los valores que se utilizaron para el controlador.
Tabla 3.8 Parámetros de diseño controlador DSMC
Parámetro de
diseño Valor
𝜆 0.110
𝐾𝐷 0.011
t𝑓 1500
𝑘1 0.200
𝑘2 10
La ley de control final y la superficie deslizante se muestran a continuación.
𝑚𝐷𝑆𝑀𝐶 = 0.921 + ∫(−0.001𝑒(𝑡) − 3.700𝑥10−5(𝑌𝑚
−(𝑡) − 6.600) − 6.700𝑥10−4𝑈𝑐(𝑡)) 𝑑𝑡
+ ∫0.011𝑠𝑖𝑔𝑛(𝑆(𝑡))
Ecuación 3.8 Ley de control DSMC aplicada al modelo
𝑆𝑢(𝑡) = 𝑅(𝑡) − 𝑌𝑚−(𝑡) + 0.110∫𝑒(𝑡)𝑑𝑡
Ecuación 3.9 Superficie aplicada al modelo

65
Nótese que los valores de 𝑘, 𝑡0 y 𝜏, son los parámetros del modelo FOPDT de la planta, y
así puede completarse la ecuación del controlador DSMC.
Después de simular el controlador DSMC, la respuesta que se obtiene del comportamiento
de la planta se observa en la Figura 3.10. Se puede observar que, alrededor del minuto
580, la glucosa está en un valor de 178 [𝑚𝑔/𝑑𝑙], lo cual ya es un punto crítico para llegar
a hiperglucemia. Por otra parte, en el lapso del minuto 862 al 906, se tiene un cuadro de
hiperglucemia con un pico máximo de 185 [𝑚𝑔/𝑑𝑙]. Por último, se tiene riesgo de llegar a
hipoglucemia en el minuto 1145, ya que la glucemia llega a tener un valor de 71[𝑚𝑔/𝑑𝑙].
Con este controlador la planta tiende a llegar a los límites de hiperglucemia o hipoglucemia,
aunque no sobrepasa mayormente de los mismos.
Figura 3.10 Respuesta planta con controlador DSMC
En la Figura 3.11 se observa la señal de control del DSMC. En este caso, además de los
3 picos del feedforward, no presenta más picos, aunque se puede observar en el
acercamiento que esta acción de control posee chattering.
Figura 3.11 Señal de control DSMC

66
DMC
En relación con el controlador DMC, en la Tabla 3.9 se muestran los parámetros de diseño,
elegidos de forma heurística, en función a lo explicado en el capítulo anterior.
Tabla 3.9 Parámetros de diseño controlador DMC
Parámetro de
diseño Valor
𝐻𝑐 250
𝐻𝑝 1800
𝑄 200
R 10
Las restricciones utilizadas fueron, de control debido a que el actuador utilizado en la planta
es una bomba por lo tanto la secuencia de control no puede tener valores menores a cero
y la restricción de salida ya que se considera los límites de glucosa. La restricción de la
tasa de cambio de control no se utiliza ya que no se considera necesario para el
funcionamiento del sistema.
0 ≤ 𝑢 ≤ 90
Ecuación 3.10 Restricción de control
0 ≤ �̂� ≤ 400
Ecuación 3.11 Restricción de salida
El valor máximo de la restricción de control es 90 [𝑈/ℎ] el cual es el valor de la tasa de
entrega de insulina bolus indicado en las especificaciones técnicas de la bomba de insulina,
en el Anexo I, 1.5 [𝑈/𝑚𝑖𝑛].
A pesar de que los límites de glucosa son de 70 a 180 [𝑚𝑔/𝑑𝑙] , para la restricción de la
salida se realizaron pruebas de funcionamiento y cuando se utilizan estos valores el
programa de quadprog muestra que la solución no es factible (The problem is infeasible),
por lo tanto, se estableció el valor de 400 [𝑚𝑔/𝑑𝑙] es el que permite el funcionamiento
completo del sistema.
La Figura 3.12 presenta la respuesta de la salida de la planta con el controlador DMC, es
evidente que este controlador, al no poseer un feedforward, presenta cuadros de
hipoglucemia e hiperglucemia altos. Es así que, del minuto 520 al 780 llega hasta 289
[𝑚𝑔/𝑑𝑙], del minuto 805 al 1040 alcanza un valor de 322 [𝑚𝑔/𝑑𝑙] en estos dos lapsos de
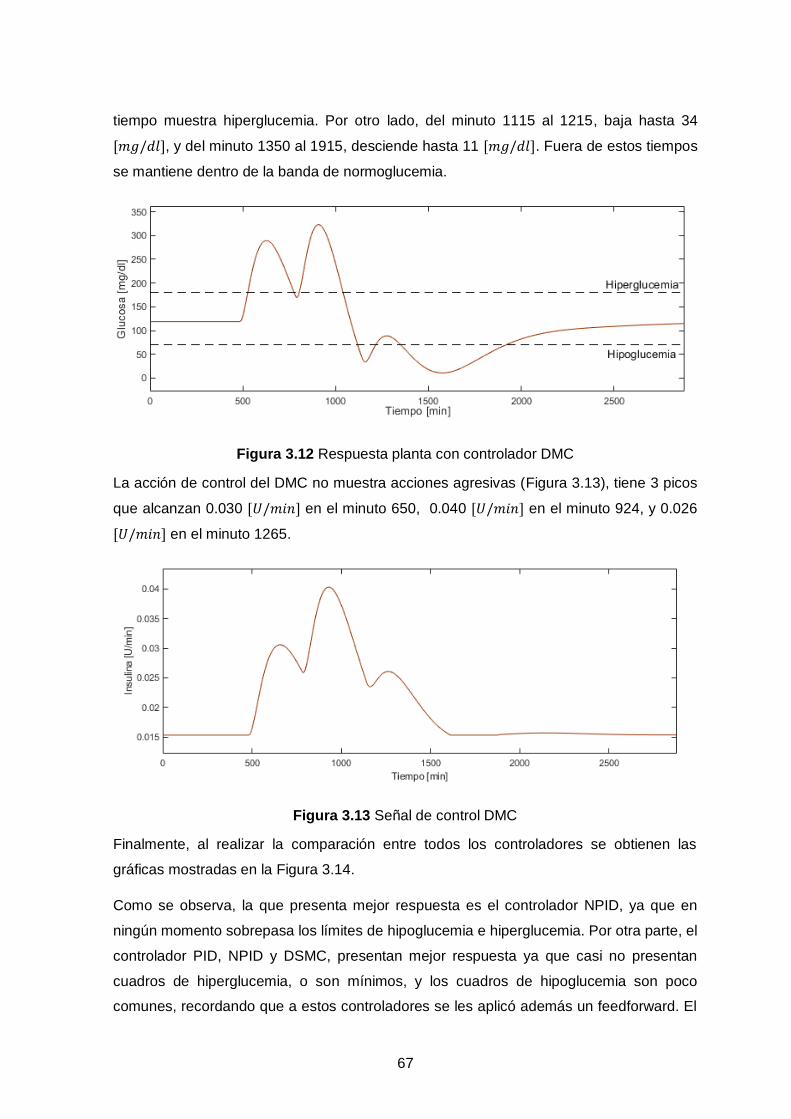
67
tiempo muestra hiperglucemia. Por otro lado, del minuto 1115 al 1215, baja hasta 34
[𝑚𝑔/𝑑𝑙], y del minuto 1350 al 1915, desciende hasta 11 [𝑚𝑔/𝑑𝑙]. Fuera de estos tiempos
se mantiene dentro de la banda de normoglucemia.
Figura 3.12 Respuesta planta con controlador DMC
La acción de control del DMC no muestra acciones agresivas (Figura 3.13), tiene 3 picos
que alcanzan 0.030 [𝑈/𝑚𝑖𝑛] en el minuto 650, 0.040 [𝑈/𝑚𝑖𝑛] en el minuto 924, y 0.026
[𝑈/𝑚𝑖𝑛] en el minuto 1265.
Figura 3.13 Señal de control DMC
Finalmente, al realizar la comparación entre todos los controladores se obtienen las
gráficas mostradas en la Figura 3.14.
Como se observa, la que presenta mejor respuesta es el controlador NPID, ya que en
ningún momento sobrepasa los límites de hipoglucemia e hiperglucemia. Por otra parte, el
controlador PID, NPID y DSMC, presentan mejor respuesta ya que casi no presentan
cuadros de hiperglucemia, o son mínimos, y los cuadros de hipoglucemia son poco
comunes, recordando que a estos controladores se les aplicó además un feedforward. El
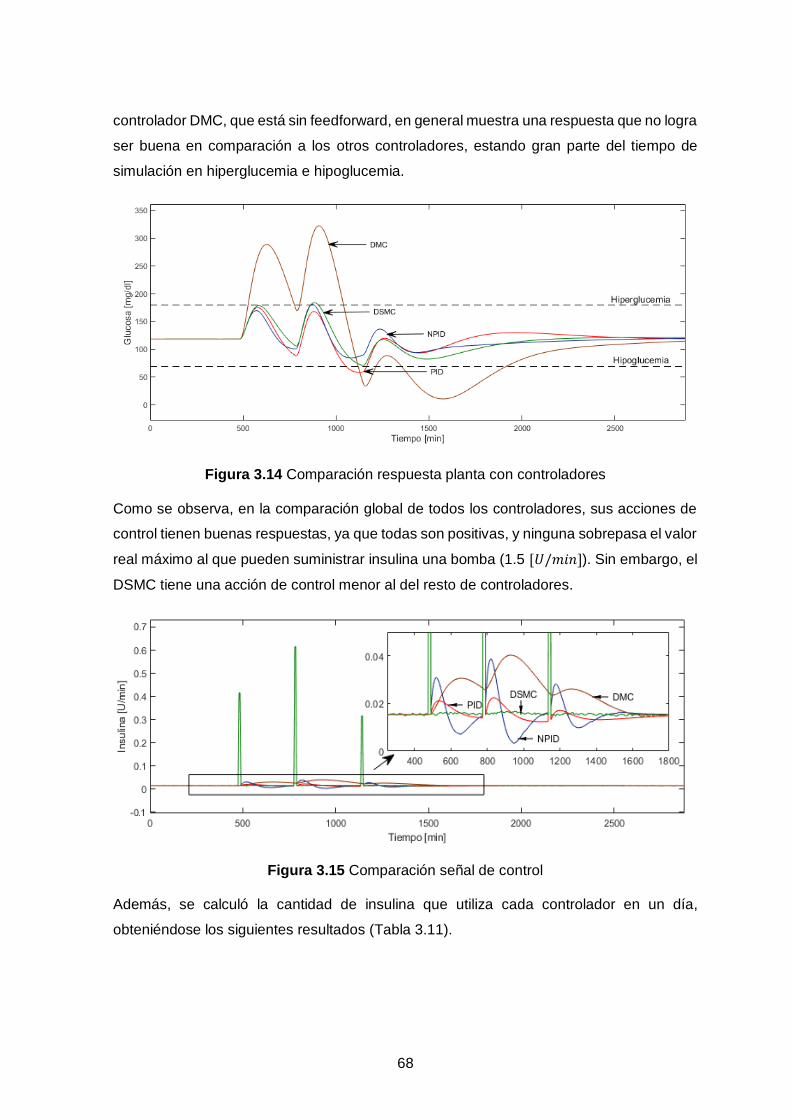
68
controlador DMC, que está sin feedforward, en general muestra una respuesta que no logra
ser buena en comparación a los otros controladores, estando gran parte del tiempo de
simulación en hiperglucemia e hipoglucemia.
Figura 3.14 Comparación respuesta planta con controladores
Como se observa, en la comparación global de todos los controladores, sus acciones de
control tienen buenas respuestas, ya que todas son positivas, y ninguna sobrepasa el valor
real máximo al que pueden suministrar insulina una bomba (1.5 [𝑈/𝑚𝑖𝑛]). Sin embargo, el
DSMC tiene una acción de control menor al del resto de controladores.
Figura 3.15 Comparación señal de control
Además, se calculó la cantidad de insulina que utiliza cada controlador en un día,
obteniéndose los siguientes resultados (Tabla 3.11).
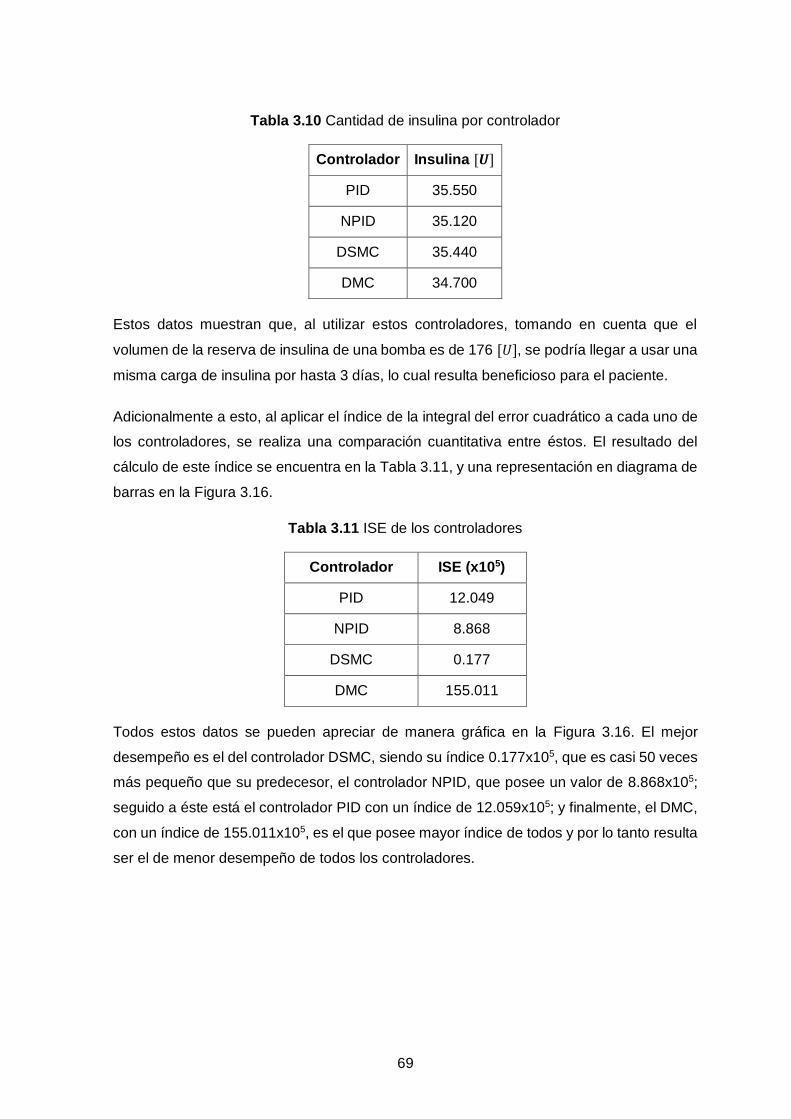
69
Tabla 3.10 Cantidad de insulina por controlador
Controlador Insulina [𝑼]
PID 35.550
NPID 35.120
DSMC 35.440
DMC 34.700
Estos datos muestran que, al utilizar estos controladores, tomando en cuenta que el
volumen de la reserva de insulina de una bomba es de 176 [𝑈], se podría llegar a usar una
misma carga de insulina por hasta 3 días, lo cual resulta beneficioso para el paciente.
Adicionalmente a esto, al aplicar el índice de la integral del error cuadrático a cada uno de
los controladores, se realiza una comparación cuantitativa entre éstos. El resultado del
cálculo de este índice se encuentra en la Tabla 3.11, y una representación en diagrama de
barras en la Figura 3.16.
Tabla 3.11 ISE de los controladores
Controlador ISE (x105)
PID 12.049
NPID 8.868
DSMC 0.177
DMC 155.011
Todos estos datos se pueden apreciar de manera gráfica en la Figura 3.16. El mejor
desempeño es el del controlador DSMC, siendo su índice 0.177x105, que es casi 50 veces
más pequeño que su predecesor, el controlador NPID, que posee un valor de 8.868x105;
seguido a éste está el controlador PID con un índice de 12.059x105; y finalmente, el DMC,
con un índice de 155.011x105, es el que posee mayor índice de todos y por lo tanto resulta
ser el de menor desempeño de todos los controladores.

70
Figura 3.16 ISEx105 controladores
Para realizar un análisis de los controladores respecto al PID se calcula el error relativo
asociado al promedio entre los dos controladores que se desean comparar, con la fórmula
presentada a continuación en la Ecuación 3.12. Esta ecuación calcula el desempeño de un
controlador con respecto a otro.
𝐸𝑟𝑟𝑜𝑟 𝑟𝑒𝑙𝑎𝑡𝑖𝑣𝑜 % =𝐼𝑆𝐸1 − 𝐼𝑆𝐸2|𝐼𝑆𝐸1 + 𝐼𝑆𝐸2|
2
∙ 100%
Ecuación 3.12 Error relativo
Los valores de los resultados obtenidos al comparar entre los controladores respecto al
PID se muestran en la Tabla 3.12. El DMC es el único controlador que no posee mejor
desempeño que el PID.
Tabla 3.12 Error relativo respecto al PID
Error relativo (%)
PID NPID DSMC DMC
PID - 30,415 194,209 -171,150
Realizando un gráfico de barras (Figura 3.17), se puede analizar de manera más eficaz
estos resultados. Evidentemente, el controlador que posea porcentajes de error relativo
0
20
40
60
80
100
120
140
160
180
PID NPID DSMC DMC
ISE
(x10
5)
Controlador
PID
NPID
DSMC
DMC
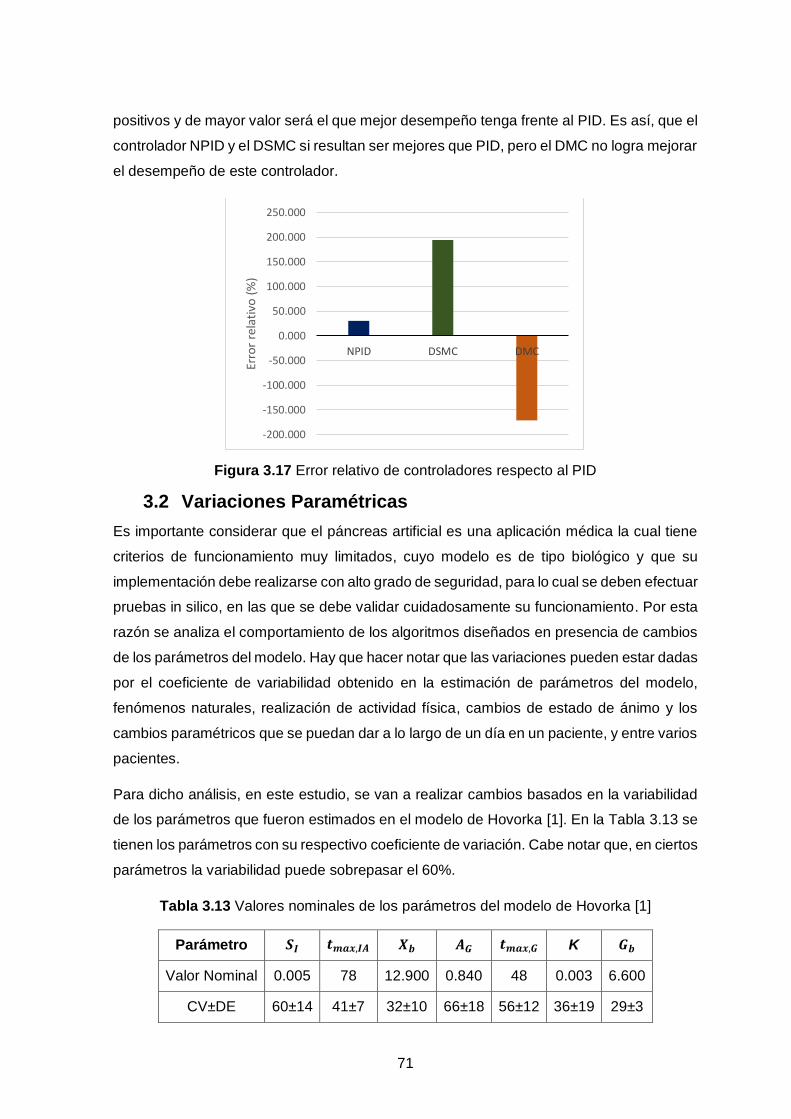
71
positivos y de mayor valor será el que mejor desempeño tenga frente al PID. Es así, que el
controlador NPID y el DSMC si resultan ser mejores que PID, pero el DMC no logra mejorar
el desempeño de este controlador.
Figura 3.17 Error relativo de controladores respecto al PID
3.2 Variaciones Paramétricas
Es importante considerar que el páncreas artificial es una aplicación médica la cual tiene
criterios de funcionamiento muy limitados, cuyo modelo es de tipo biológico y que su
implementación debe realizarse con alto grado de seguridad, para lo cual se deben efectuar
pruebas in silico, en las que se debe validar cuidadosamente su funcionamiento. Por esta
razón se analiza el comportamiento de los algoritmos diseñados en presencia de cambios
de los parámetros del modelo. Hay que hacer notar que las variaciones pueden estar dadas
por el coeficiente de variabilidad obtenido en la estimación de parámetros del modelo,
fenómenos naturales, realización de actividad física, cambios de estado de ánimo y los
cambios paramétricos que se puedan dar a lo largo de un día en un paciente, y entre varios
pacientes.
Para dicho análisis, en este estudio, se van a realizar cambios basados en la variabilidad
de los parámetros que fueron estimados en el modelo de Hovorka [1]. En la Tabla 3.13 se
tienen los parámetros con su respectivo coeficiente de variación. Cabe notar que, en ciertos
parámetros la variabilidad puede sobrepasar el 60%.
Tabla 3.13 Valores nominales de los parámetros del modelo de Hovorka [1]
Parámetro 𝑺𝑰 𝒕𝒎𝒂𝒙,𝑰𝑨 𝑿𝒃 𝑨𝑮 𝒕𝒎𝒂𝒙,𝑮 K 𝑮𝒃
Valor Nominal 0.005 78 12.900 0.840 48 0.003 6.600
CV±DE 60±14 41±7 32±10 66±18 56±12 36±19 29±3
-200.000
-150.000
-100.000
-50.000
0.000
50.000
100.000
150.000
200.000
250.000
NPID DSMC DMC
Erro
r re
lati
vo (
%)
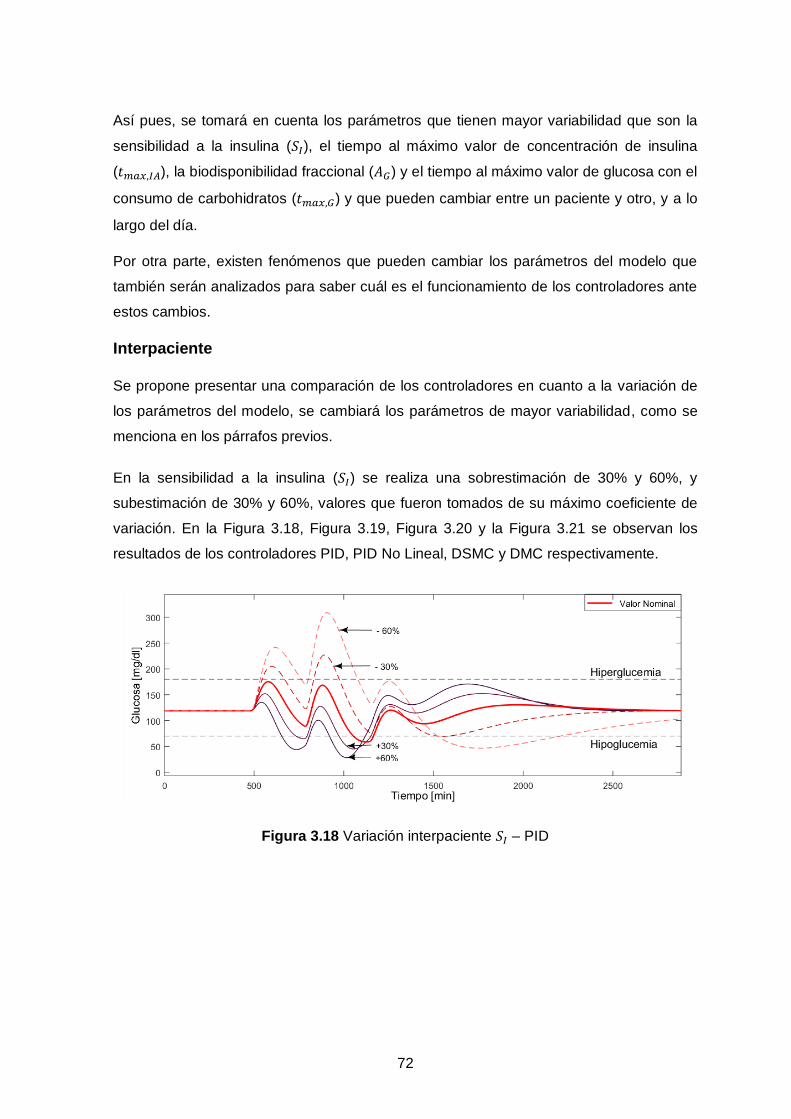
72
Así pues, se tomará en cuenta los parámetros que tienen mayor variabilidad que son la
sensibilidad a la insulina (𝑆𝐼), el tiempo al máximo valor de concentración de insulina
(𝑡𝑚𝑎𝑥,𝐼𝐴), la biodisponibilidad fraccional (𝐴𝐺) y el tiempo al máximo valor de glucosa con el
consumo de carbohidratos (𝑡𝑚𝑎𝑥,𝐺) y que pueden cambiar entre un paciente y otro, y a lo
largo del día.
Por otra parte, existen fenómenos que pueden cambiar los parámetros del modelo que
también serán analizados para saber cuál es el funcionamiento de los controladores ante
estos cambios.
Interpaciente
Se propone presentar una comparación de los controladores en cuanto a la variación de
los parámetros del modelo, se cambiará los parámetros de mayor variabilidad, como se
menciona en los párrafos previos.
En la sensibilidad a la insulina (𝑆𝐼) se realiza una sobrestimación de 30% y 60%, y
subestimación de 30% y 60%, valores que fueron tomados de su máximo coeficiente de
variación. En la Figura 3.18, Figura 3.19, Figura 3.20 y la Figura 3.21 se observan los
resultados de los controladores PID, PID No Lineal, DSMC y DMC respectivamente.
Figura 3.18 Variación interpaciente 𝑆𝐼 – PID
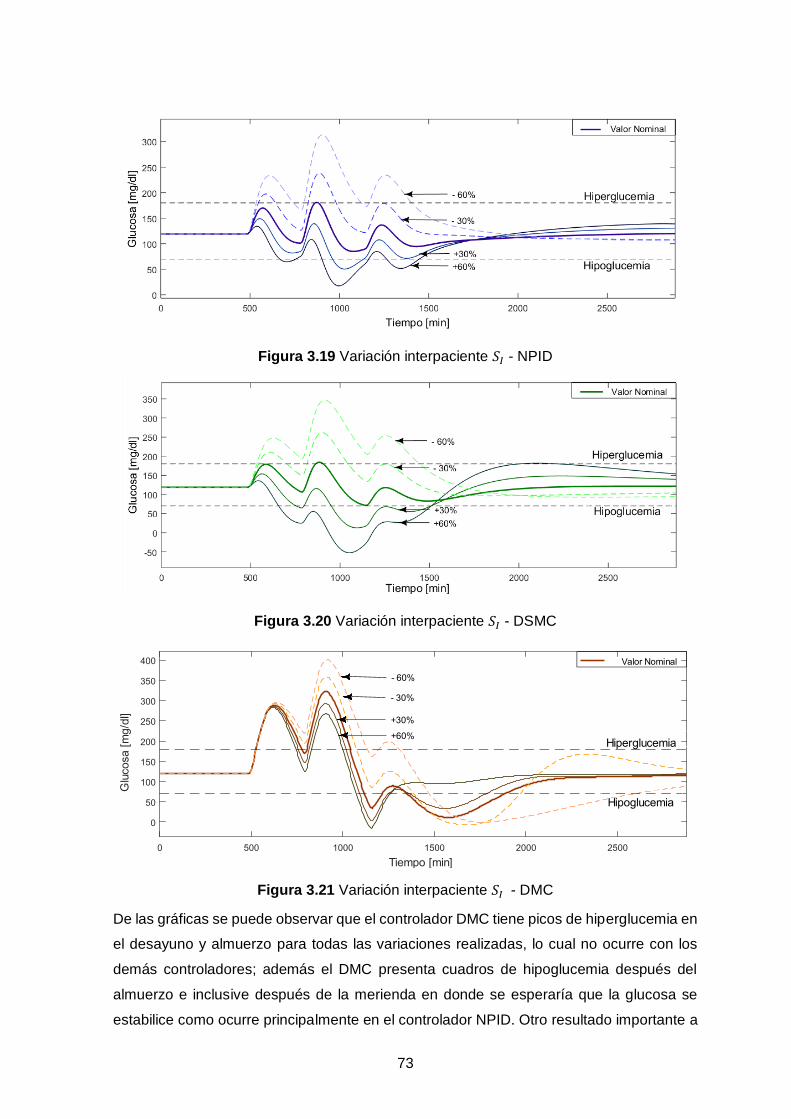
73
Figura 3.19 Variación interpaciente 𝑆𝐼 - NPID
Figura 3.20 Variación interpaciente 𝑆𝐼 - DSMC
Figura 3.21 Variación interpaciente 𝑆𝐼 - DMC
De las gráficas se puede observar que el controlador DMC tiene picos de hiperglucemia en
el desayuno y almuerzo para todas las variaciones realizadas, lo cual no ocurre con los
demás controladores; además el DMC presenta cuadros de hipoglucemia después del
almuerzo e inclusive después de la merienda en donde se esperaría que la glucosa se
estabilice como ocurre principalmente en el controlador NPID. Otro resultado importante a
iempo min
lu
cosa
mg d
l
ipoglucemia
iperglucemia
alor ominal
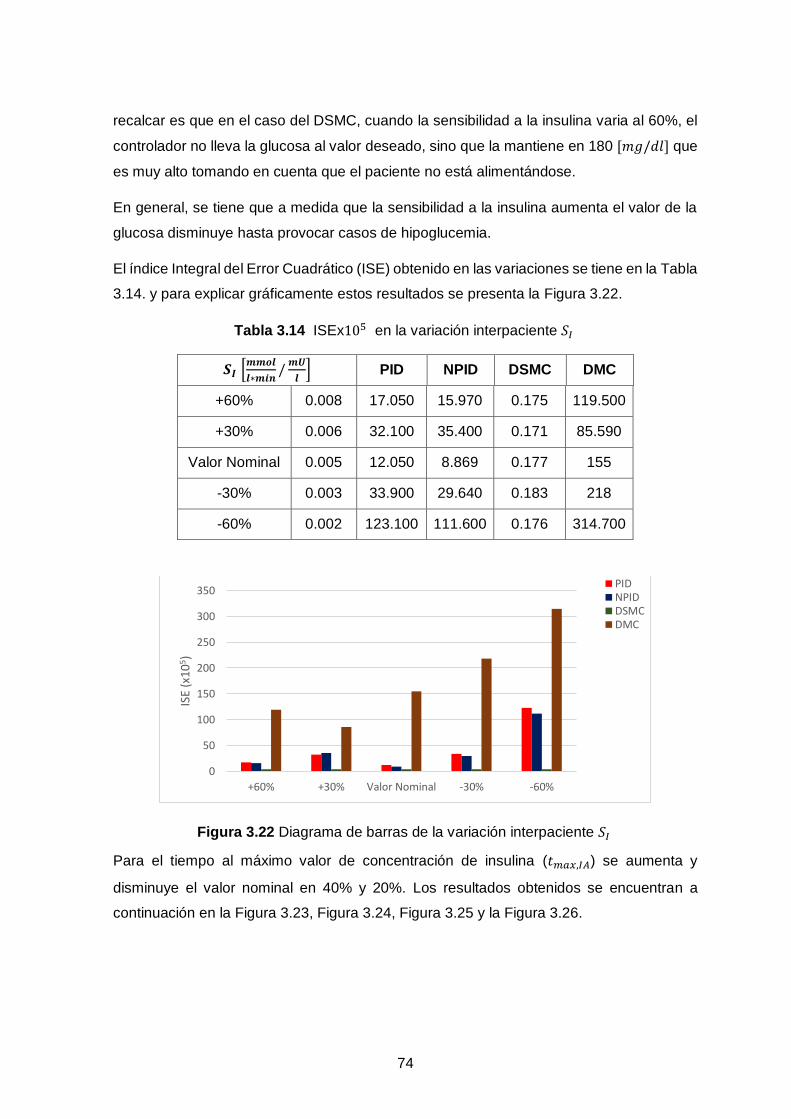
74
recalcar es que en el caso del DSMC, cuando la sensibilidad a la insulina varia al 60%, el
controlador no lleva la glucosa al valor deseado, sino que la mantiene en 180 [𝑚𝑔/𝑑𝑙] que
es muy alto tomando en cuenta que el paciente no está alimentándose.
En general, se tiene que a medida que la sensibilidad a la insulina aumenta el valor de la
glucosa disminuye hasta provocar casos de hipoglucemia.
El índice Integral del Error Cuadrático (ISE) obtenido en las variaciones se tiene en la Tabla
3.14. y para explicar gráficamente estos resultados se presenta la Figura 3.22.
Tabla 3.14 ISEx105 en la variación interpaciente 𝑆𝐼
𝑺𝑰 [𝒎𝒎𝒐𝒍
𝒍∗𝒎𝒊𝒏/𝒎𝑼
𝒍] PID NPID DSMC DMC
+60% 0.008 17.050 15.970 0.175 119.500
+30% 0.006 32.100 35.400 0.171 85.590
Valor Nominal 0.005 12.050 8.869 0.177 155
-30% 0.003 33.900 29.640 0.183 218
-60% 0.002 123.100 111.600 0.176 314.700
Figura 3.22 Diagrama de barras de la variación interpaciente 𝑆𝐼
Para el tiempo al máximo valor de concentración de insulina (𝑡𝑚𝑎𝑥,𝐼𝐴) se aumenta y
disminuye el valor nominal en 40% y 20%. Los resultados obtenidos se encuentran a
continuación en la Figura 3.23, Figura 3.24, Figura 3.25 y la Figura 3.26.
0
50
100
150
200
250
300
350
+60% +30% Valor Nominal -30% -60%
ISE
(x10
5)
PIDNPIDDSMCDMC
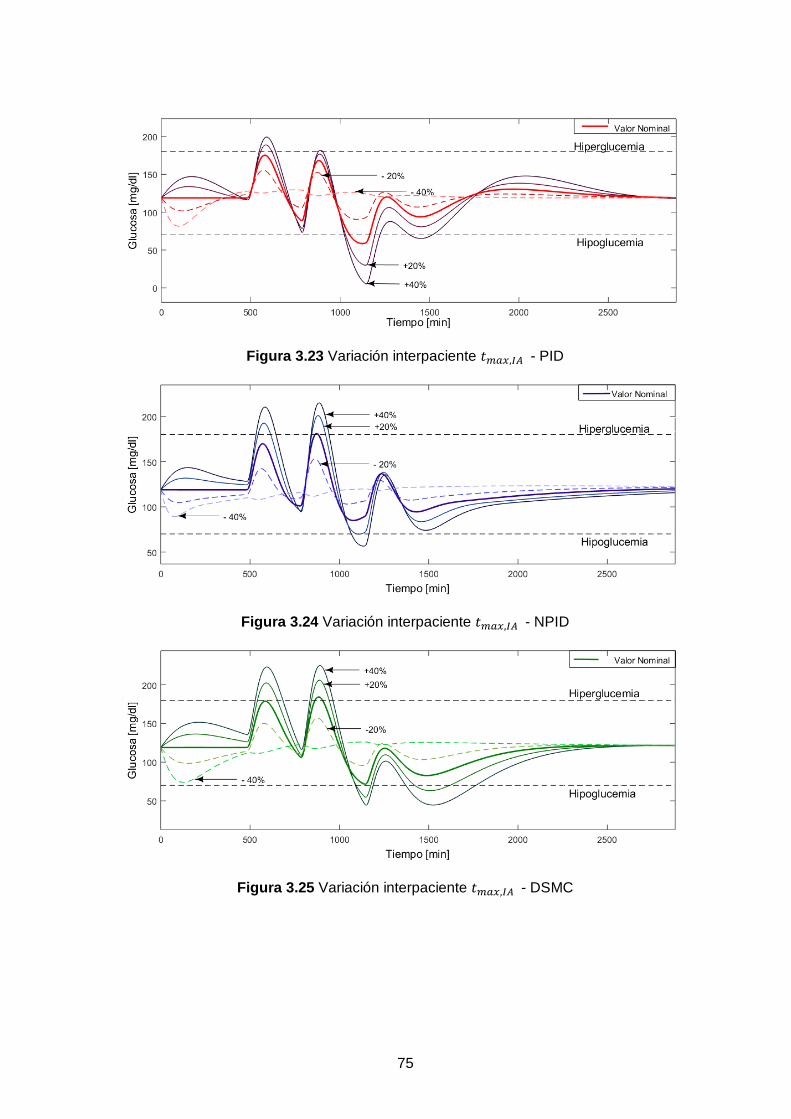
75
Figura 3.23 Variación interpaciente 𝑡𝑚𝑎𝑥,𝐼𝐴 - PID
Figura 3.24 Variación interpaciente 𝑡𝑚𝑎𝑥,𝐼𝐴 - NPID
Figura 3.25 Variación interpaciente 𝑡𝑚𝑎𝑥,𝐼𝐴 - DSMC
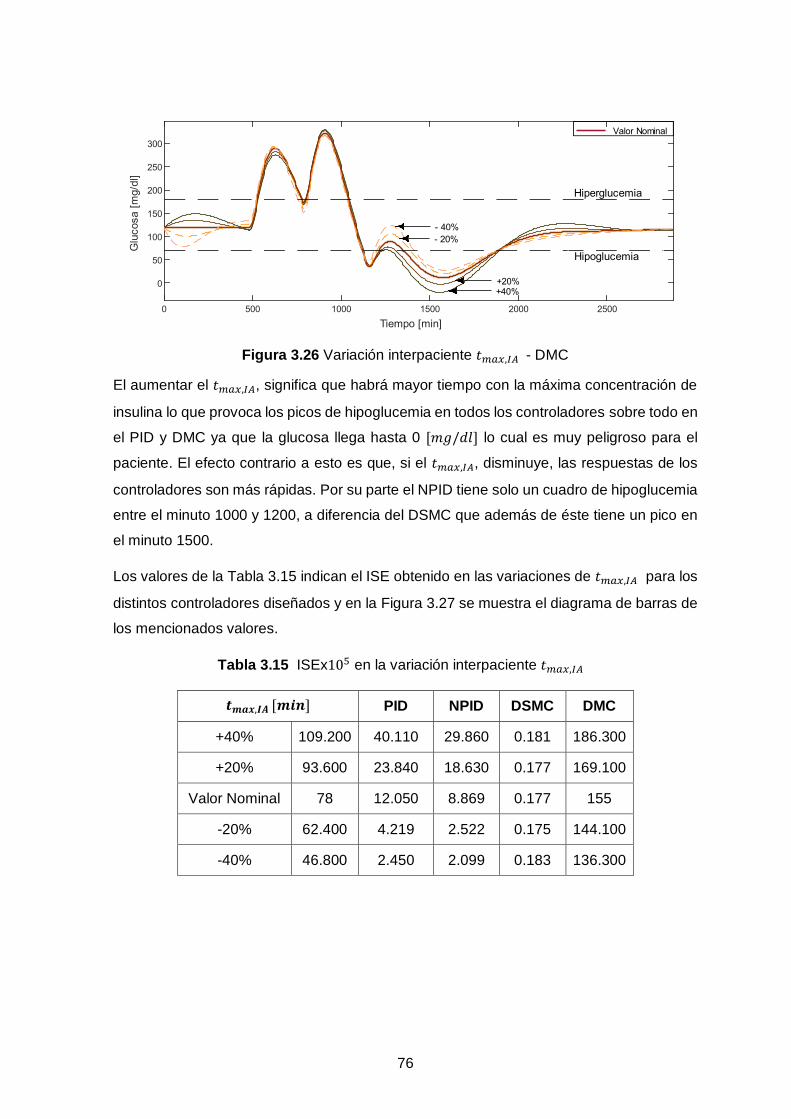
76
Figura 3.26 Variación interpaciente 𝑡𝑚𝑎𝑥,𝐼𝐴 - DMC
El aumentar el 𝑡𝑚𝑎𝑥,𝐼𝐴, significa que habrá mayor tiempo con la máxima concentración de
insulina lo que provoca los picos de hipoglucemia en todos los controladores sobre todo en
el PID y DMC ya que la glucosa llega hasta 0 [𝑚𝑔/𝑑𝑙] lo cual es muy peligroso para el
paciente. El efecto contrario a esto es que, si el 𝑡𝑚𝑎𝑥,𝐼𝐴, disminuye, las respuestas de los
controladores son más rápidas. Por su parte el NPID tiene solo un cuadro de hipoglucemia
entre el minuto 1000 y 1200, a diferencia del DSMC que además de éste tiene un pico en
el minuto 1500.
Los valores de la Tabla 3.15 indican el ISE obtenido en las variaciones de 𝑡𝑚𝑎𝑥,𝐼𝐴 para los
distintos controladores diseñados y en la Figura 3.27 se muestra el diagrama de barras de
los mencionados valores.
Tabla 3.15 ISEx105 en la variación interpaciente 𝑡𝑚𝑎𝑥,𝐼𝐴
𝒕𝒎𝒂𝒙,𝑰𝑨 [𝒎𝒊𝒏] PID NPID DSMC DMC
+40% 109.200 40.110 29.860 0.181 186.300
+20% 93.600 23.840 18.630 0.177 169.100
Valor Nominal 78 12.050 8.869 0.177 155
-20% 62.400 4.219 2.522 0.175 144.100
-40% 46.800 2.450 2.099 0.183 136.300
iempo min
lu
cosa
mg d
l
iperglucemia
ipoglucemia
alor ominal

77
Figura 3.27 Diagrama de barras de la variación interpaciente 𝑡𝑚𝑎𝑥,𝐼𝐴
Mientras que, para el tiempo al máximo valor de glucosa (𝑡𝑚𝑎𝑥,𝐺) con el consumo de
carbohidratos, se realiza sobrestimación y subestimación de 50% y 25%.
Figura 3.28 Variación interpaciente 𝑡𝑚𝑎𝑥,𝐺 - PID
Figura 3.29 Variación interpaciente 𝑡𝑚𝑎𝑥,𝐺 - NPID
0
20
40
60
80
100
120
140
160
180
200
40% 20% Valor Nominal -20% -40%
ISE
(x10
5)
PID
NPID
DSMC
DMC
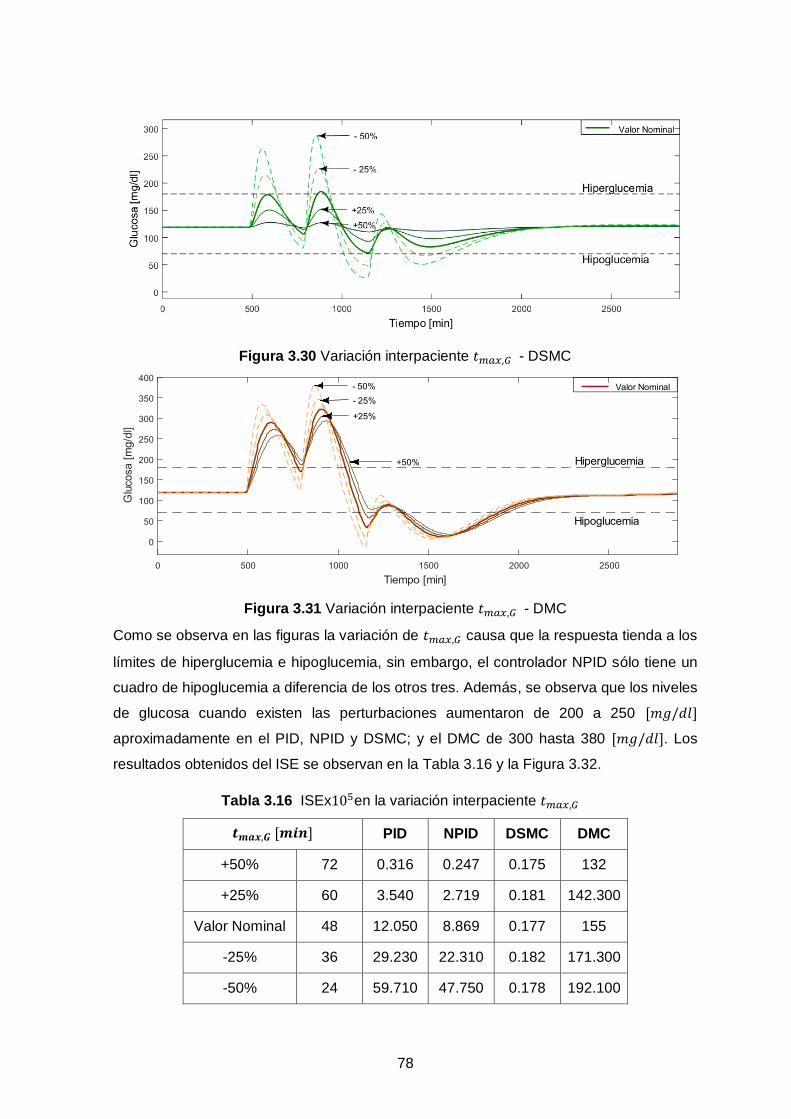
78
Figura 3.30 Variación interpaciente 𝑡𝑚𝑎𝑥,𝐺 - DSMC
Figura 3.31 Variación interpaciente 𝑡𝑚𝑎𝑥,𝐺 - DMC
Como se observa en las figuras la variación de 𝑡𝑚𝑎𝑥,𝐺 causa que la respuesta tienda a los
límites de hiperglucemia e hipoglucemia, sin embargo, el controlador NPID sólo tiene un
cuadro de hipoglucemia a diferencia de los otros tres. Además, se observa que los niveles
de glucosa cuando existen las perturbaciones aumentaron de 200 a 250 [𝑚𝑔/𝑑𝑙]
aproximadamente en el PID, NPID y DSMC; y el DMC de 300 hasta 380 [𝑚𝑔/𝑑𝑙]. Los
resultados obtenidos del ISE se observan en la Tabla 3.16 y la Figura 3.32.
Tabla 3.16 ISEx105en la variación interpaciente 𝑡𝑚𝑎𝑥,𝐺
𝒕𝒎𝒂𝒙,𝑮 [𝒎𝒊𝒏] PID NPID DSMC DMC
+50% 72 0.316 0.247 0.175 132
+25% 60 3.540 2.719 0.181 142.300
Valor Nominal 48 12.050 8.869 0.177 155
-25% 36 29.230 22.310 0.182 171.300
-50% 24 59.710 47.750 0.178 192.100
iempo min
lu
cosa
mg d
l
alor ominal
iperglucemia
ipoglucemia
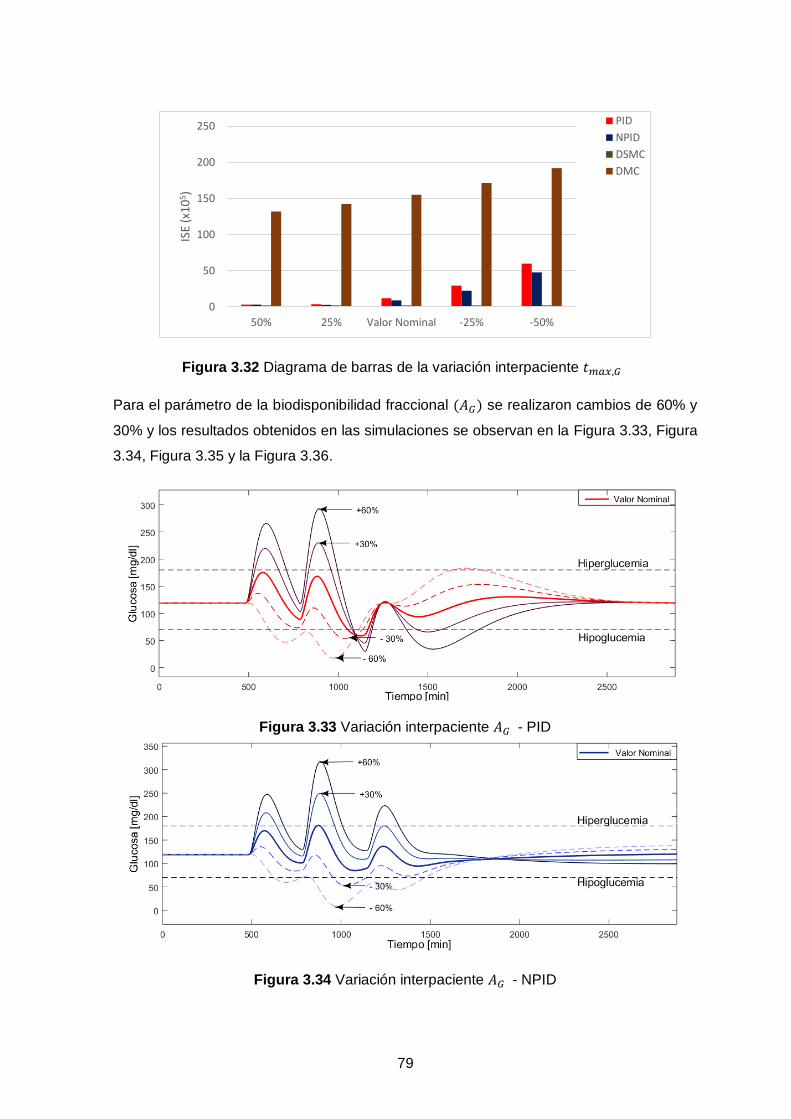
79
Figura 3.32 Diagrama de barras de la variación interpaciente 𝑡𝑚𝑎𝑥,𝐺
Para el parámetro de la biodisponibilidad fraccional (𝐴𝐺) se realizaron cambios de 60% y
30% y los resultados obtenidos en las simulaciones se observan en la Figura 3.33, Figura
3.34, Figura 3.35 y la Figura 3.36.
Figura 3.33 Variación interpaciente 𝐴𝐺 - PID
Figura 3.34 Variación interpaciente 𝐴𝐺 - NPID
0
50
100
150
200
250
50% 25% Valor Nominal -25% -50%
ISE
(x10
5)
PID
NPID
DSMC
DMC
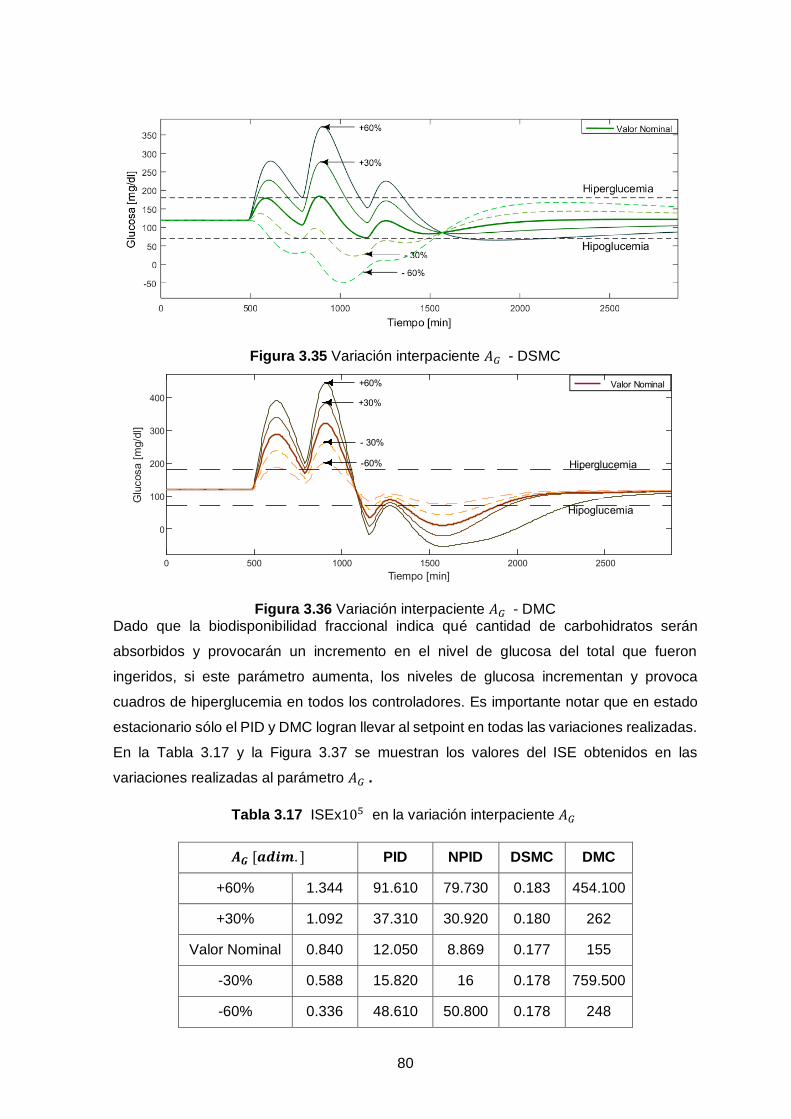
80
Figura 3.35 Variación interpaciente 𝐴𝐺 - DSMC
Figura 3.36 Variación interpaciente 𝐴𝐺 - DMC Dado que la biodisponibilidad fraccional indica qué cantidad de carbohidratos serán
absorbidos y provocarán un incremento en el nivel de glucosa del total que fueron
ingeridos, si este parámetro aumenta, los niveles de glucosa incrementan y provoca
cuadros de hiperglucemia en todos los controladores. Es importante notar que en estado
estacionario sólo el PID y DMC logran llevar al setpoint en todas las variaciones realizadas.
En la Tabla 3.17 y la Figura 3.37 se muestran los valores del ISE obtenidos en las
variaciones realizadas al parámetro 𝐴𝐺 .
Tabla 3.17 ISEx105 en la variación interpaciente 𝐴𝐺
𝑨𝑮 [𝒂𝒅𝒊𝒎. ] PID NPID DSMC DMC
+60% 1.344 91.610 79.730 0.183 454.100
+30% 1.092 37.310 30.920 0.180 262
Valor Nominal 0.840 12.050 8.869 0.177 155
-30% 0.588 15.820 16 0.178 759.500
-60% 0.336 48.610 50.800 0.178 248
iempo min
lu
cosa
mg d
l
iperglucemia
ipoglucemia
alor ominal

81
Figura 3.37 Diagrama de barras de la variación interpaciente 𝐴𝐺
Intrapaciente.
Las variaciones intrapaciente buscan representar cambios en una persona Diabética Tipo
1 a lo largo de un día, para lo cual se toma en cuenta los mismos parámetros y porcentajes
de variación realizados anteriormente, pero en cambio éstos no se mantienen constantes
a lo largo del día.
Las variaciones se realizan dos veces al día en intervalos de tres horas cada uno, el primero
desde las 09h00 hasta las 12h00 se realiza una sobrestimación, y el segundo periodo es
desde las 18h00 hasta las 21h00 se considera una subestimación.
Así, en la sensibilidad a la insulina se tiene cambios como los mostrados en la Figura 3.38,
y Figura 3.39 en los horarios establecidos en un porcentaje de +-60 y +-30.
Figura 3.38 Variación intrapaciente 𝑆𝐼 en +-60%
0
100
200
300
400
500
600
700
800
60% 30% Valor Nominal -30% -60%
ISE
(x10
5)
PID
NPID
DSMC
DMC
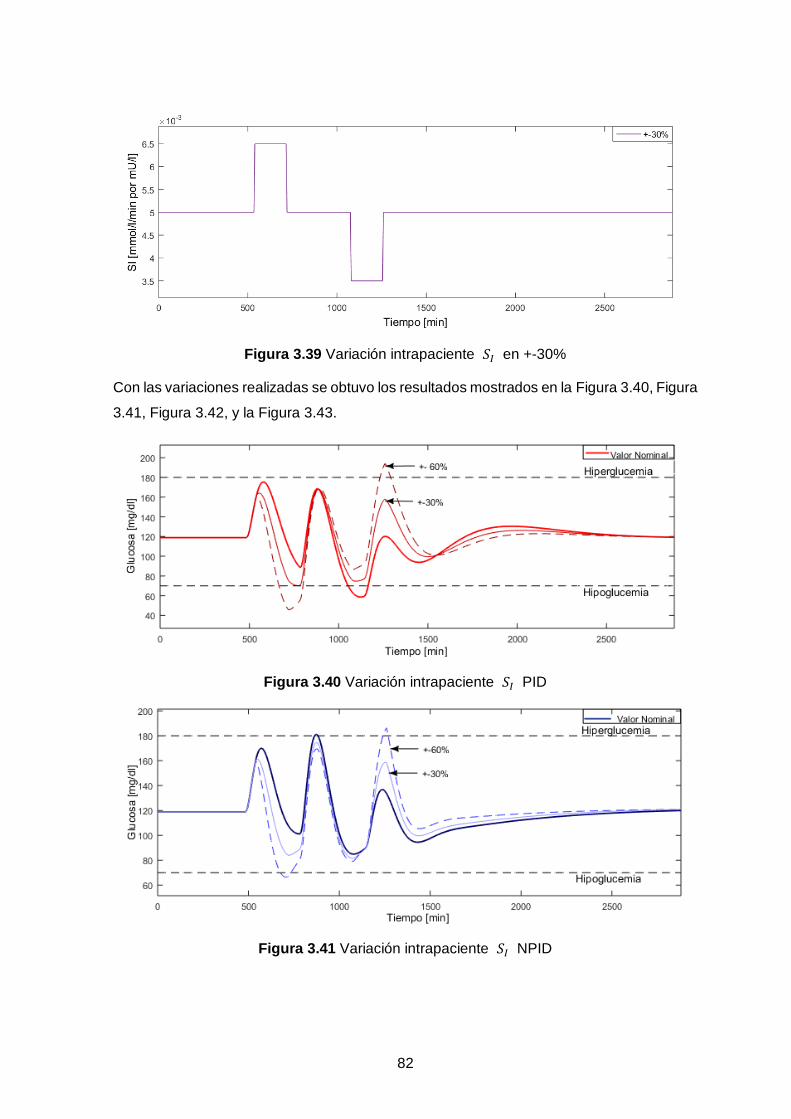
82
Figura 3.39 Variación intrapaciente 𝑆𝐼 en +-30%
Con las variaciones realizadas se obtuvo los resultados mostrados en la Figura 3.40, Figura
3.41, Figura 3.42, y la Figura 3.43.
Figura 3.40 Variación intrapaciente 𝑆𝐼 PID
Figura 3.41 Variación intrapaciente 𝑆𝐼 NPID

83
Figura 3.42 Variación intrapaciente 𝑆𝐼 DSMC
Figura 3.43 Variación intrapaciente 𝑆𝐼 DMC
Por lo observado en las gráficas, la variación a lo largo del día en +-30% provoca pocos
cambios en la respuesta de los controladores. Por otro lado, la variación del +-60% hace
que la glucosa baje hasta hipoglucemia después de la primera comida en el PID, NPID y
DSMC. Todos los controladores llevan la respuesta al setpoint en estado estable.
De las simulaciones realizadas, en la Tabla 3.18 y la Figura 3.44 se muestra el ISE
obtenido.
Tabla 3.18 ISEx105en la variación intrapaciente 𝑆𝐼
𝑺𝑰 [𝒎𝒎𝒐𝒍
𝒍∗𝒎𝒊𝒏/𝒎𝑼
𝒍] PID NPID DSMC DMC
Valor Nominal 12.050 8.869 0.177 155
+-60% 16.270 11.510 0.177 174.500
+-30% 10.260 8.550 0.180 159.400
iempo min
lu
cosa
mg d
l
ipoglucemia
alor ominal
iperglucemia
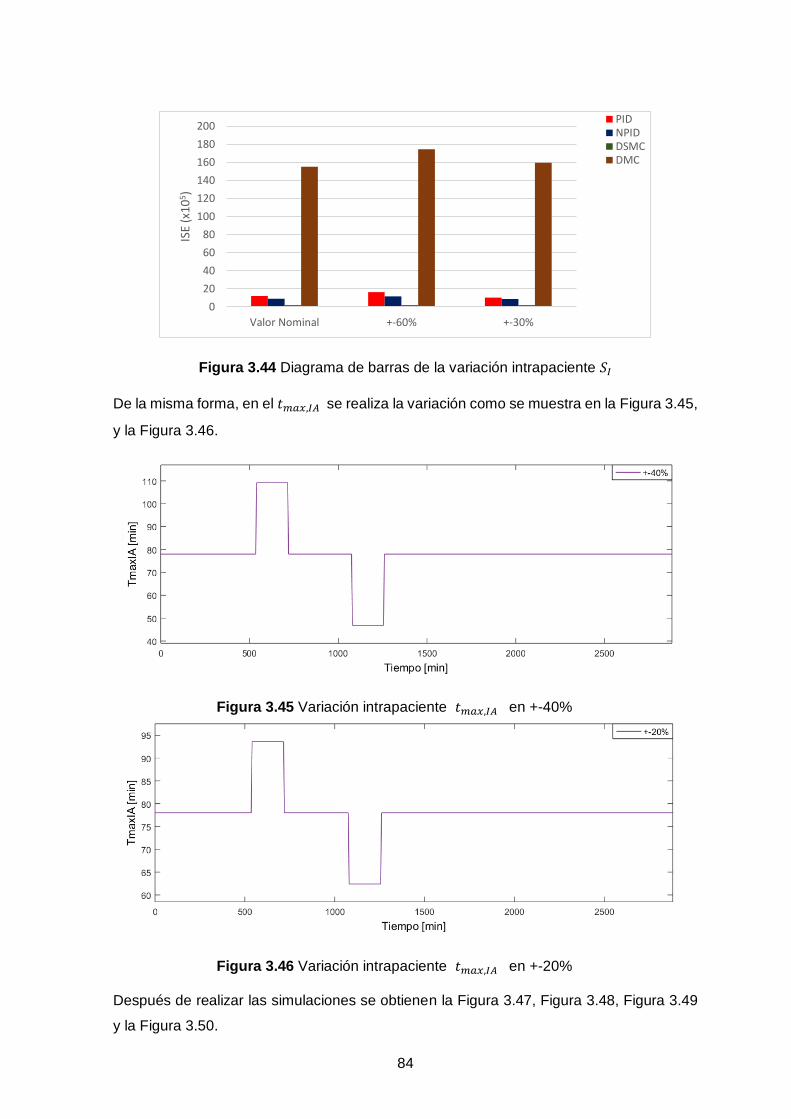
84
Figura 3.44 Diagrama de barras de la variación intrapaciente 𝑆𝐼
De la misma forma, en el 𝑡𝑚𝑎𝑥,𝐼𝐴 se realiza la variación como se muestra en la Figura 3.45,
y la Figura 3.46.
Figura 3.45 Variación intrapaciente 𝑡𝑚𝑎𝑥,𝐼𝐴 en +-40%
Figura 3.46 Variación intrapaciente 𝑡𝑚𝑎𝑥,𝐼𝐴 en +-20%
Después de realizar las simulaciones se obtienen la Figura 3.47, Figura 3.48, Figura 3.49
y la Figura 3.50.
0
20
40
60
80
100
120
140
160
180
200
Valor Nominal +-60% +-30%
ISE
(x10
5)
PIDNPIDDSMCDMC
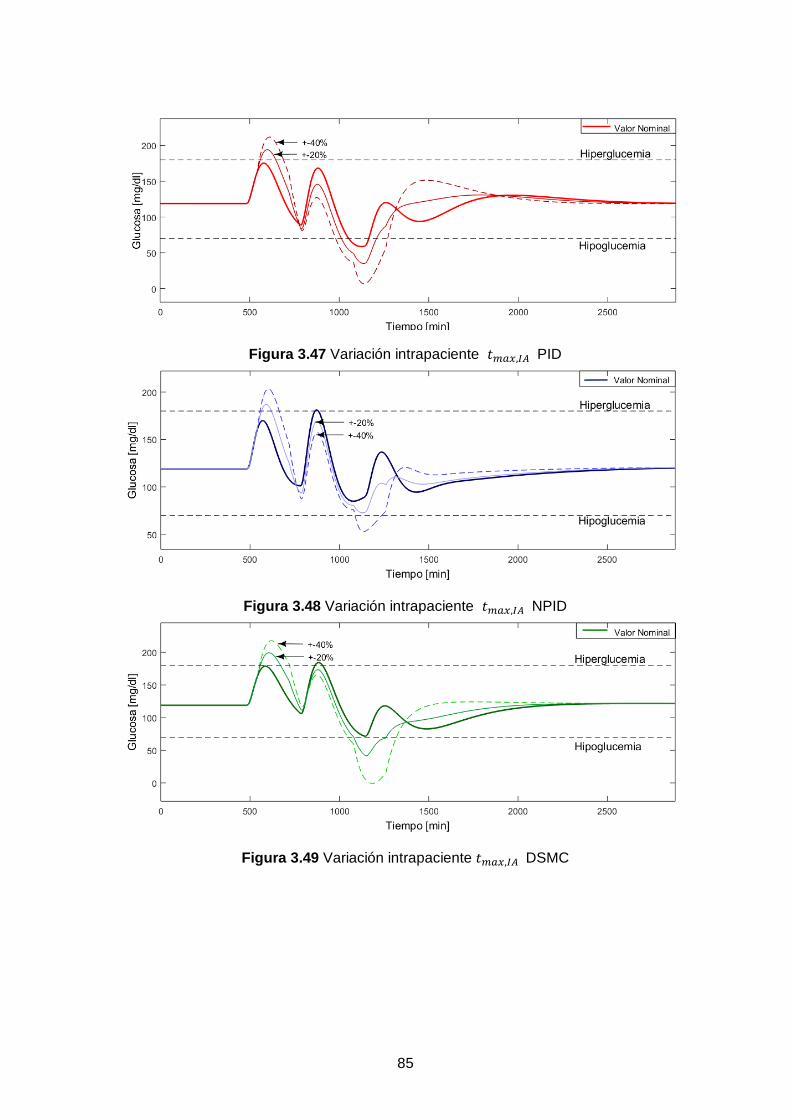
85
Figura 3.47 Variación intrapaciente 𝑡𝑚𝑎𝑥,𝐼𝐴 PID
Figura 3.48 Variación intrapaciente 𝑡𝑚𝑎𝑥,𝐼𝐴 NPID
Figura 3.49 Variación intrapaciente 𝑡𝑚𝑎𝑥,𝐼𝐴 DSMC
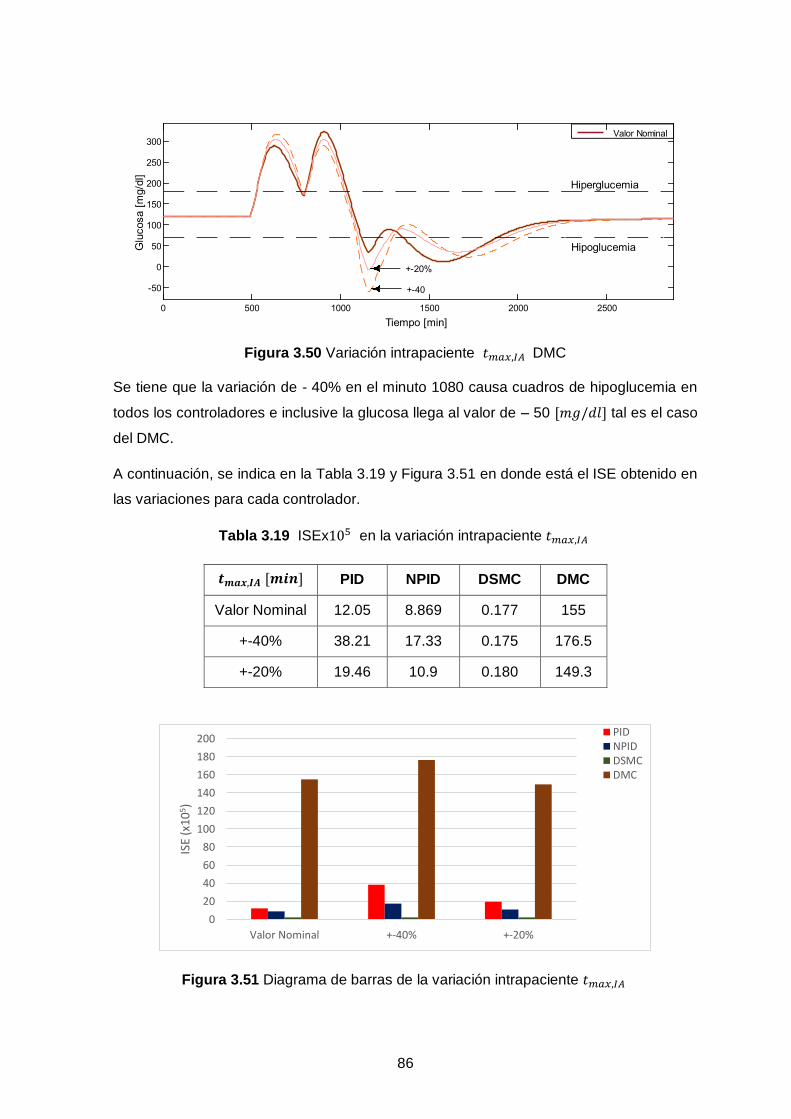
86
Figura 3.50 Variación intrapaciente 𝑡𝑚𝑎𝑥,𝐼𝐴 DMC
Se tiene que la variación de - 40% en el minuto 1080 causa cuadros de hipoglucemia en
todos los controladores e inclusive la glucosa llega al valor de – 50 [𝑚𝑔/𝑑𝑙] tal es el caso
del DMC.
A continuación, se indica en la Tabla 3.19 y Figura 3.51 en donde está el ISE obtenido en
las variaciones para cada controlador.
Tabla 3.19 ISEx105 en la variación intrapaciente 𝑡𝑚𝑎𝑥,𝐼𝐴
𝒕𝒎𝒂𝒙,𝑰𝑨 [𝒎𝒊𝒏] PID NPID DSMC DMC
Valor Nominal 12.05 8.869 0.177 155
+-40% 38.21 17.33 0.175 176.5
+-20% 19.46 10.9 0.180 149.3
Figura 3.51 Diagrama de barras de la variación intrapaciente 𝑡𝑚𝑎𝑥,𝐼𝐴
iempo min
lucosa
mg d
l
iperglucemia
ipoglucemia
alor ominal
0
20
40
60
80
100
120
140
160
180
200
Valor Nominal +-40% +-20%
ISE
(x10
5)
PIDNPIDDSMCDMC
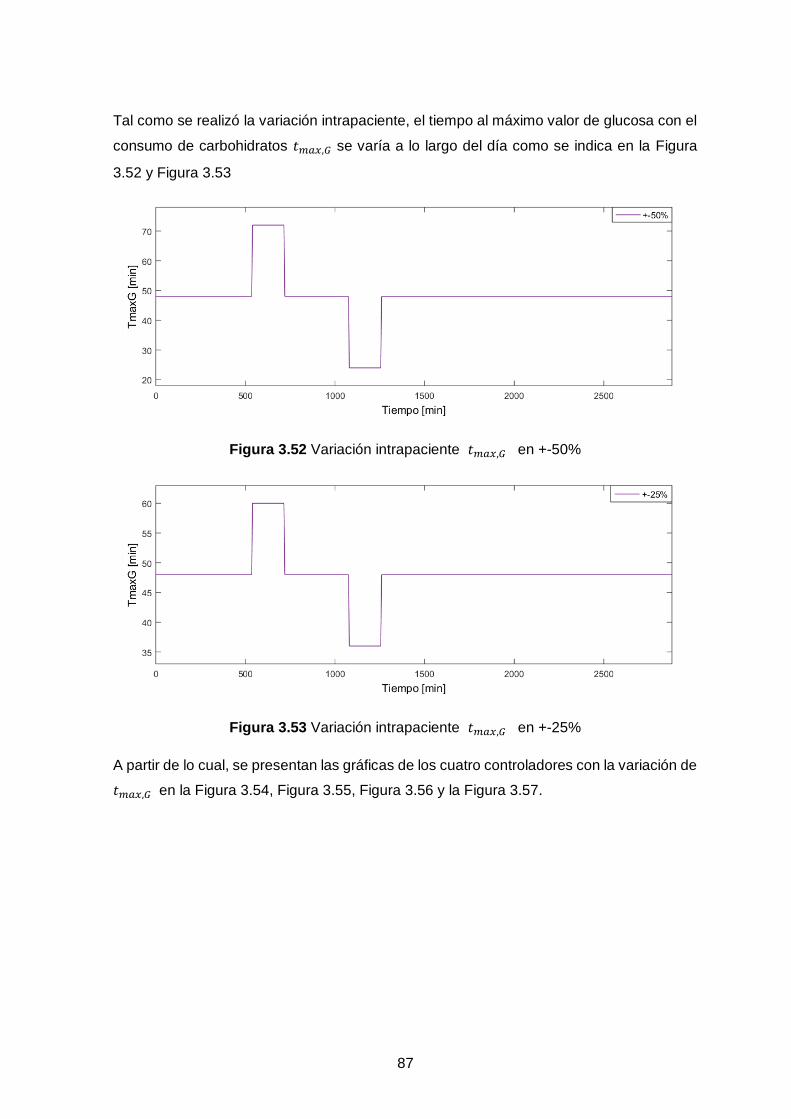
87
Tal como se realizó la variación intrapaciente, el tiempo al máximo valor de glucosa con el
consumo de carbohidratos 𝑡𝑚𝑎𝑥,𝐺 se varía a lo largo del día como se indica en la Figura
3.52 y Figura 3.53
Figura 3.52 Variación intrapaciente 𝑡𝑚𝑎𝑥,𝐺 en +-50%
Figura 3.53 Variación intrapaciente 𝑡𝑚𝑎𝑥,𝐺 en +-25%
A partir de lo cual, se presentan las gráficas de los cuatro controladores con la variación de
𝑡𝑚𝑎𝑥,𝐺 en la Figura 3.54, Figura 3.55, Figura 3.56 y la Figura 3.57.
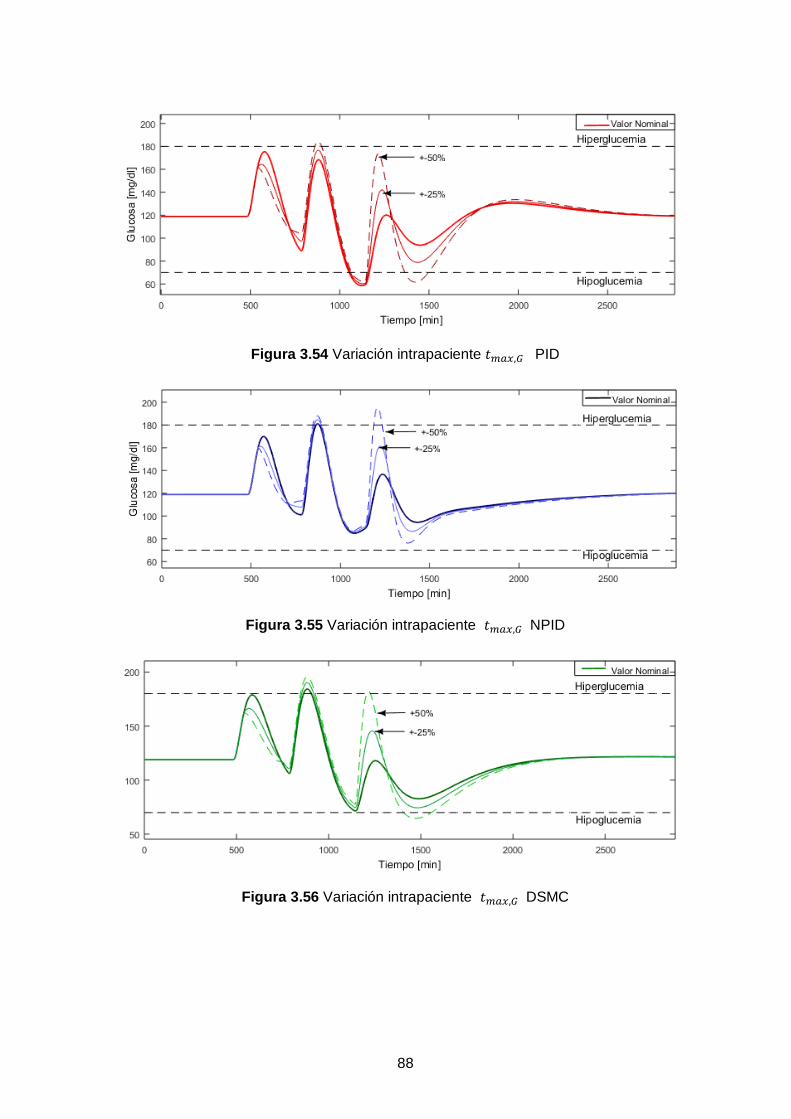
88
Figura 3.54 Variación intrapaciente 𝑡𝑚𝑎𝑥,𝐺 PID
Figura 3.55 Variación intrapaciente 𝑡𝑚𝑎𝑥,𝐺 NPID
Figura 3.56 Variación intrapaciente 𝑡𝑚𝑎𝑥,𝐺 DSMC

89
Figura 3.57 Variación intrapaciente 𝑡𝑚𝑎𝑥,𝐺 DMC
En la variación intrapaciente realizada para el 𝑡𝑚𝑎𝑥,𝐺 se observan los mayores cambios
cuando se cambió a +- 50%.
A lo cual se calcula el valor del ISE para cada variación y estos valores se muestran y
representan en la Tabla 3.20 y la Figura 3.58, respectivamente.
Tabla 3.20 ISEx105 en la variación intrapaciente 𝑡𝑚𝑎𝑥,𝐺
𝒕𝒎𝒂𝒙,𝑮 [𝒎𝒊𝒏] PID NPID DSMC DMC
Valor Nominal 12.050 8.869 0.177 155
+-50% 17.670 13.480 0.181 174.500
+-25% 13.070 0.997 0.198 162.800
Figura 3.58 Diagrama de barras de la variación intrapaciente 𝑡𝑚𝑎𝑥,G
Por último, en la biodisponibilidad fraccional se tiene variaciones como las presentadas en
la Figura 3.59 y la Figura 3.60
iempo min
lucosa
mg d
l
alor ominal
iperglucemia
ipoglucemia
0
20
40
60
80
100
120
140
160
180
200
Valor Nominal +-50% +-25%
ISE
(x10
5)
PID
NPIDDSMC
DMC
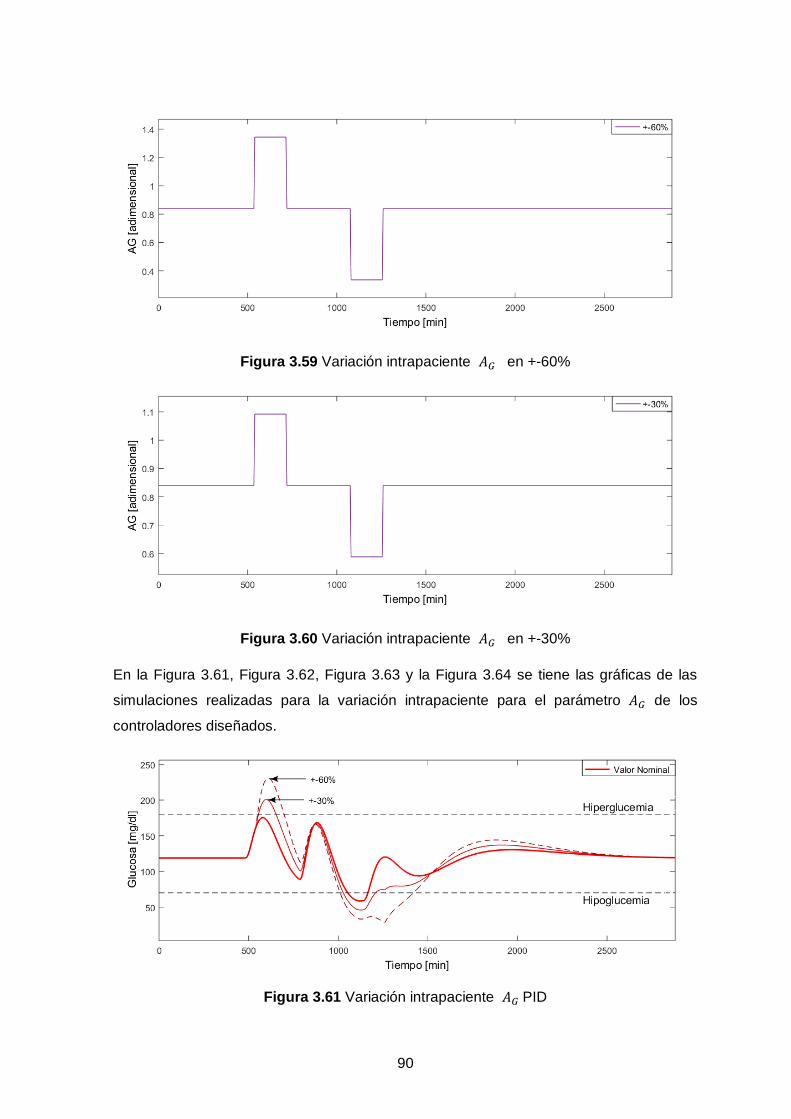
90
Figura 3.59 Variación intrapaciente 𝐴𝐺 en +-60%
Figura 3.60 Variación intrapaciente 𝐴𝐺 en +-30%
En la Figura 3.61, Figura 3.62, Figura 3.63 y la Figura 3.64 se tiene las gráficas de las
simulaciones realizadas para la variación intrapaciente para el parámetro 𝐴𝐺 de los
controladores diseñados.
Figura 3.61 Variación intrapaciente 𝐴𝐺 PID

91
Figura 3.62 Variación intrapaciente 𝐴𝐺 NPID
Figura 3.63 Variación intrapaciente 𝐴𝐺 DSMC
Figura 3.64 Variación intrapaciente 𝐴𝐺 DMC
Al realizar la variación intrapaciente de 𝐴𝐺, la glucosa se ve afectada al momento que la
planta recibe la primera perturbación y, además, provoca hipoglucemia alrededor del
minuto 1250 en todos los controladores.
iempo min
lu
cosa
mg d
l
iperglucemia
ipoglucemia
alor ominal

92
El índice ISE obtenido como resultado de dichas simulaciones se muestra en la Tabla 3.21
y la Figura 3.65.
Tabla 3.21 ISEx105 en la variación intrapaciente 𝐴𝐺
𝑨𝑮 [𝒂𝒅𝒊𝒎. ] PID NPID DSMC DMC
Valor Nominal 12.050 8.869 0.177 155
+-60% 44.580 22.680 0.177 205.700
+-30% 23.400 13.880 0.179 174.300
Figura 3.65 Diagrama de barras de la variación intrapaciente 𝐴G Escenarios
Si se considera las variaciones interpaciente e intrapaciente, éstas fueron realizadas en
base al coeficiente de variación de cada parámetro. Ahora bien, éstos son valores
netamente matemáticos, por lo que, se propone presentar dos escenarios que representen
situaciones que suceden en la vida diaria de un paciente.
El escenario 1 considera errores de modelado sobre la sensibilidad de la insulina 𝑆𝐼, el
tiempo a la máxima concentración de insulina 𝑡𝑚𝑎𝑥,𝐼𝐴 y la constante de auto-regulación 𝐾,
con una subestimación del 30%, 30 % y 20%, respectivamente.
El escenario 2 realiza la combinación del escenario 1 junto con la presencia de dos
fenómenos que afectan a algunos parámetros. De 2:00 horas a 6:00 horas, por efecto del
fenómeno del alba, se varía –25% la sensibilidad de la insulina (𝑆𝐼) y +10% la constante
de autoregulación (𝐾) y de 8:00 a 13:00 se varía +20% la sensibilidad de la insulina (𝑆𝐼) y
-10% la constante de autoregulación (𝐾), representando la realización de actividad física
0
20
40
60
80
100
120
140
160
180
200
Valor Nominal +-60% +-30%
ISE
(x10
5)
PIDNPIDDSMCDMC

93
del paciente. Los resultados se observan en la Figura 3.66, Figura 3.67, Figura 3.68 y la
Figura 3.69.
Figura 3.66 Escenarios - PID
Figura 3.67 Escenarios - NPID
Figura 3.68 Escenarios - DSMC
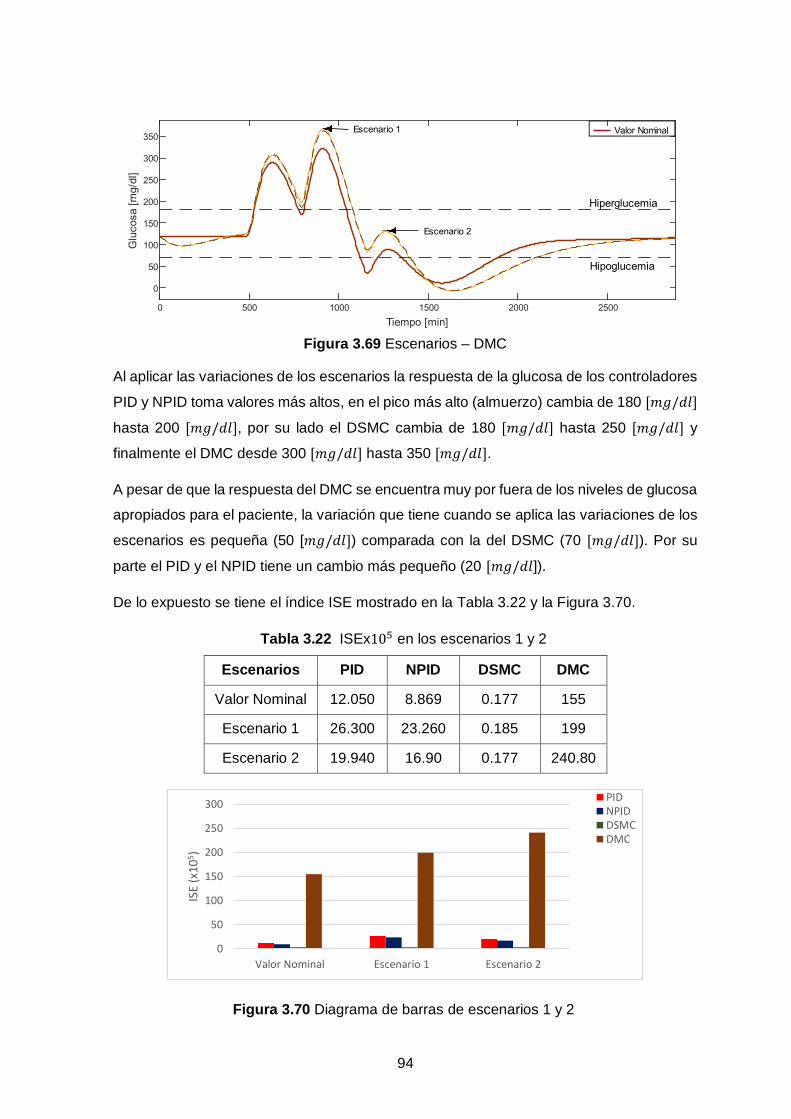
94
Figura 3.69 Escenarios – DMC
Al aplicar las variaciones de los escenarios la respuesta de la glucosa de los controladores
PID y NPID toma valores más altos, en el pico más alto (almuerzo) cambia de 180 [𝑚𝑔/𝑑𝑙]
hasta 200 [𝑚𝑔/𝑑𝑙], por su lado el DSMC cambia de 180 [𝑚𝑔/𝑑𝑙] hasta 250 [𝑚𝑔/𝑑𝑙] y
finalmente el DMC desde 300 [𝑚𝑔/𝑑𝑙] hasta 350 [𝑚𝑔/𝑑𝑙].
A pesar de que la respuesta del DMC se encuentra muy por fuera de los niveles de glucosa
apropiados para el paciente, la variación que tiene cuando se aplica las variaciones de los
escenarios es pequeña (50 [𝑚𝑔/𝑑𝑙]) comparada con la del DSMC (70 [𝑚𝑔/𝑑𝑙]). Por su
parte el PID y el NPID tiene un cambio más pequeño (20 [𝑚𝑔/𝑑𝑙]).
De lo expuesto se tiene el índice ISE mostrado en la Tabla 3.22 y la Figura 3.70.
Tabla 3.22 ISEx105 en los escenarios 1 y 2
Escenarios PID NPID DSMC DMC
Valor Nominal 12.050 8.869 0.177 155
Escenario 1 26.300 23.260 0.185 199
Escenario 2 19.940 16.90 0.177 240.80
Figura 3.70 Diagrama de barras de escenarios 1 y 2
iempo min
lucosa
mg d
l
Escenario
Escenario
iperglucemia
ipoglucemia
alor ominal
0
50
100
150
200
250
300
Valor Nominal Escenario 1 Escenario 2
ISE
(x10
5)
PIDNPIDDSMCDMC
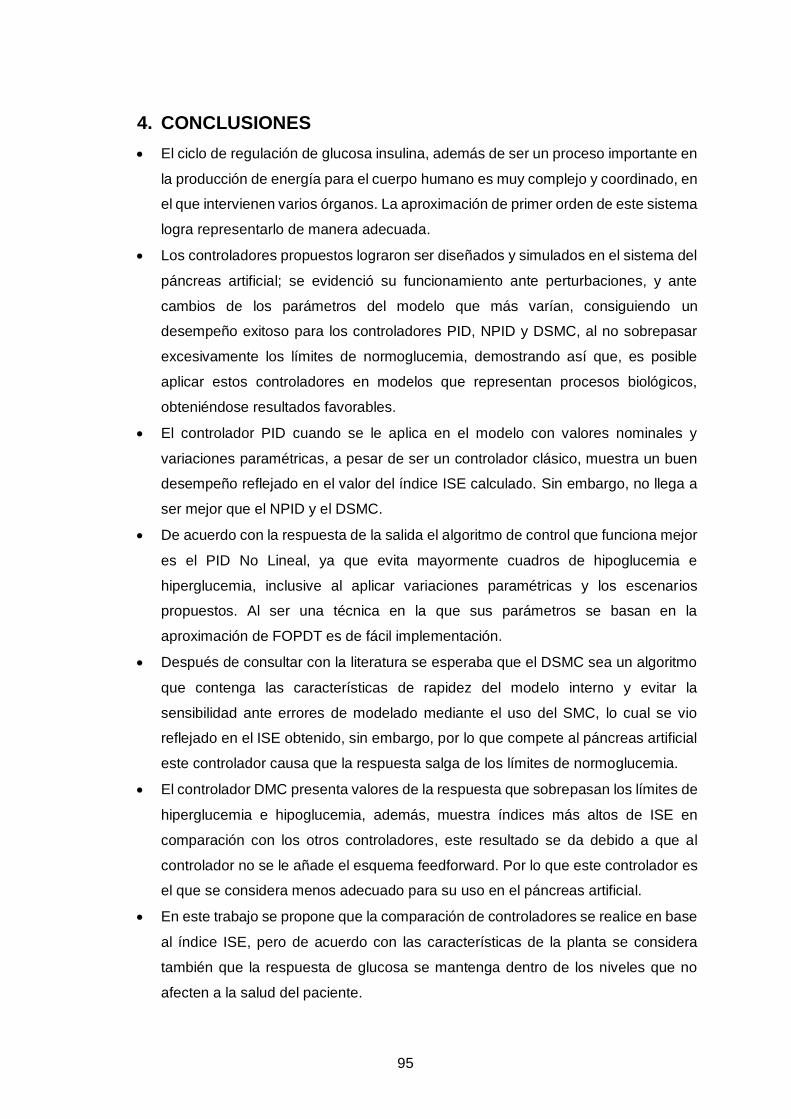
95
4. CONCLUSIONES
• El ciclo de regulación de glucosa insulina, además de ser un proceso importante en
la producción de energía para el cuerpo humano es muy complejo y coordinado, en
el que intervienen varios órganos. La aproximación de primer orden de este sistema
logra representarlo de manera adecuada.
• Los controladores propuestos lograron ser diseñados y simulados en el sistema del
páncreas artificial; se evidenció su funcionamiento ante perturbaciones, y ante
cambios de los parámetros del modelo que más varían, consiguiendo un
desempeño exitoso para los controladores PID, NPID y DSMC, al no sobrepasar
excesivamente los límites de normoglucemia, demostrando así que, es posible
aplicar estos controladores en modelos que representan procesos biológicos,
obteniéndose resultados favorables.
• El controlador PID cuando se le aplica en el modelo con valores nominales y
variaciones paramétricas, a pesar de ser un controlador clásico, muestra un buen
desempeño reflejado en el valor del índice ISE calculado. Sin embargo, no llega a
ser mejor que el NPID y el DSMC.
• De acuerdo con la respuesta de la salida el algoritmo de control que funciona mejor
es el PID No Lineal, ya que evita mayormente cuadros de hipoglucemia e
hiperglucemia, inclusive al aplicar variaciones paramétricas y los escenarios
propuestos. Al ser una técnica en la que sus parámetros se basan en la
aproximación de FOPDT es de fácil implementación.
• Después de consultar con la literatura se esperaba que el DSMC sea un algoritmo
que contenga las características de rapidez del modelo interno y evitar la
sensibilidad ante errores de modelado mediante el uso del SMC, lo cual se vio
reflejado en el ISE obtenido, sin embargo, por lo que compete al páncreas artificial
este controlador causa que la respuesta salga de los límites de normoglucemia.
• El controlador DMC presenta valores de la respuesta que sobrepasan los límites de
hiperglucemia e hipoglucemia, además, muestra índices más altos de ISE en
comparación con los otros controladores, este resultado se da debido a que al
controlador no se le añade el esquema feedforward. Por lo que este controlador es
el que se considera menos adecuado para su uso en el páncreas artificial.
• En este trabajo se propone que la comparación de controladores se realice en base
al índice ISE, pero de acuerdo con las características de la planta se considera
también que la respuesta de glucosa se mantenga dentro de los niveles que no
afecten a la salud del paciente.
96
• Mediante la presentación de una interfaz gráfica se permite modificar los diferentes
parámetros de sintonización y simulación de los controladores, y obtener resultados
de la respuesta del sistema, para parámetros nominales y frente a escenarios, la
señal de control e índices de desempeño.
Recomendaciones
• Dado que el controlador predictivo ha sido uno de los más utilizados en el área del
páncreas artificial, se recomienda que se siga realizando investigación con los
diferentes tipos de MPC.
• La sintonización de los controladores, para este caso, debe realizarse siempre
considerando el bienestar del paciente, ya que un cuadro de hipoglucemia o
hiperglucemia no sólo puede causar mareos, temblores, sino problemas más
severos como la pérdida de la conciencia, convulsiones y hasta la muerte.
• Siendo la diabetes una enfermedad que cada año va cobrando más cantidad de
víctimas causando un alto impacto social, es importante que la comunidad científica
se enfoque en el desarrollo de la tecnología para páncreas artificial lo que mejoraría
el tratamiento para esta enfermedad.
97
5. REFERENCIAS BIBLIOGRÁFICAS
[1] R. ovorka, . habit, M. E. Wilinska, y Y. Ruan, “Modeling day-to-day variability of
glucose-insulin regulation over 12-week home use of closed-loop insulin delivery”,
IEEE Trans. Biomed. Eng., vol. 64, núm. 6, pp. 1412–1419, 2017.
[2] L. Kovács, “Linear parameter varying (LP ) based robust control of type-I diabetes
driven for real patient data”, Knowledge-Based Syst., vol. 122, pp. 199–213, 2017.
[3] K. Mendoza et al., “Fundamentos biomoleculares de la diabetes mellitus”, Duazary
Rev. la Fac. Ciencias Salud, vol. 2, pp. 135–142, 2005.
[4] L. Malgor y M. alsecia, “Farmacología De La Diabetes”, en Farmacología
Humana, UNNE, pp. 174–191.
[5] . habit y R. ovorka, “Coming of age: he artificial pancreas for type diabetes”,
Diabetologia, vol. 59, núm. 9, pp. 1795–1805, 2016.
[6] C. Cobelli, E. Renard, y B. Kovatchev, “Artificial pancreas: Past, present, future”,
Perspect. Diabetes, vol. 60, núm. 11, pp. 2672–2682, 2011.
[7] J. Bondia, J. Vehi, C. C. Palerm, y P. errero, “El Páncreas Artificial : Control
Automatico de Infusion de Insulina en Diabetes Mellitus ipo ”, Revista
Iberoamericana de Automática e Informática Industrial, vol. 7, núm. 2, pp. 5–20,
2010.
[8] M. Cabero y D. Almeida, “Insulinas: Evolución y papel del farmacéutico
comunitario”, Universidad Complutense, .
[9] L. A. Malgor y M. E. alsecia, “Farmacología De La Diabetes”, en Farmacología
Humana, UNNE, pp. 174–191.
[10] G. Montagma, C. Manucci, O. Ramos, S. Satillán, L. Agnese, y I. Moreno,
“ ratamiento de la diabetes mellitus tipo ”, Curso Int. Niños y Jóvenes con
Diabetes., vol. 16, núm. 4, pp. 129–134, 2008.
[11] A. Molina, “Sistema de Control Borroso en Lazo Cerrado para erapias con
Insulina en Diabetes ipo ”, Universidad Politécnica de Madrid, 2013.
[12] National Diabetes Information Clearinghouse, Guía para personas con diabetes
tipo 1 y 2. National Diabetes Information Clearinghouse, 2013.
[13] S. Davis y . Lastra, “Diabetes y Bajo ivel de lucosa ( ipoglicemia)”, J. Clin.
Endocrinol. Metab., vol. 93, núm. 8, p. E1, 2008.
98
[14] F. Rocca y J. C. Plá, “Metabolismo de los lúcidos”, en Diabetes Mellitus, vol. 4,
1963, pp. 31–49.
[15] J. R. Mckee y . Mckee, “Metabolismo de los Carbohidratos”, en Bioquímica Las
Bases Moleculares de la Vida, 5a ed., 2011, pp. 264–370.
[16] J. Olivares y A. Arellano, “Bases Moleculares de las Acciones de la Insulina”, vol.
27, núm. 1, pp. 9–18, 2008.
[17] Instituto acional de Estadísticas y Sensos, “Anuario de Estadísticas itales:
acidos ivos y Defunciones ”, .
[18] J. Mediavilla, “Complicaciones de la diabetes mellitus. Diagnóstico y tratamiento”,
Semergen, vol. 27, núm. 3, pp. 132–145, 2001.
[19] K. Kumareswaran, M. L. Evans, y R. ovorka, “Artificial pancreas: an emerging
approach to treat ype diabetes”, Expert Rev. Med. Devices, vol. 6, núm. 4, pp.
401–410, 2009.
[20] I. Conget, “Diagnóstico, clasificación y patogenia de la diabetes mellitus”, Rev.
Española Cardiol., vol. 55, núm. 5, pp. 528–535, 2002.
[21] . Rodríguez, “Insulinoterapia”, Rev. Medica Hered., vol. 14, núm. 3, pp. 140–144,
2003.
[22] C. Cobelli, E. Renard, y B. Kovatchev, “Artificial pancreas: Past, Present, Future”,
Perspect. Diabetes, vol. 60, núm. 11, pp. 2672–2682, 2011.
[23] J. Pickup y . Keen, “Continuous Subcutaneous Insulin Infusion at Years”,
Diabetes Care, vol. 25, núm. 3, pp. 593–598, 2002.
[24] L. M. uyett, E. Dassau, . Zisser, y F. Iii, “ lucose Sensor Dynamics and the
Artificial Pancreas”, IEEE Control Syst. Mag., vol. 38, núm. 1, pp. 30–46, 2018.
[25] K. Kumareswaran, M. Evans, y R. ovorka, “Artificial pancreas: an emerging
approach to treat ype diabetes”, Expert Rev. Med. Devices, vol. 6, núm. 4, pp.
401–410, 2009.
[26] R. Bergman, L. Phillips, y C. Cobelli, “Physiologic evaluation of factors controlling
glucose tolerance in man: measurement of insulin sensitivity and beta-cell glucose
sensitivity from the response to intravenous glucose”, J. Clin. Invest., vol. 68, pp.
1456–1467, 1981.
[27] C.-L. Chen y H.-W. sai, “Modeling the physiological glucose–insulin system on

99
normal and diabetic subjects”, Comput. Methods Programs Biomed., vol. 97, núm.
2, pp. 130–140, 2010.
[28] C. Cobelli, C. D. Man, M. . Pedersen, A. Bertoldo, y . offolo, “Advancing Our
Understanding of the lucose System via Modeling: A Perspective”, IEEE Trans.
Biomed. Eng., vol. 61, núm. 5, pp. 1577–1592, 2014.
[29] M. Wilinska, L. Chassin, . Schaller, L. Schaupp, . Pieber, y R. ovorka, “Insulin
kinetics in type-I diabetes: continuous and bolus delivery of rapid acting insulin”,
IEEE Trans. Biomed. Eng., vol. 52, núm. 1, pp. 3–12, 2005.
[30] R. onzález y A. Cipriano, “Control Difuso con Estimador de Estados para
Sistemas de Páncreas Artificia”, Rev. Iberoam. Automática e Informática Ind., vol.
13, pp. 393–402, 2016.
[31] . Alfaro, “Identificación de modelos de orden reducido a partir de la curva de
reacción del proceso”, Cienc. y Tecnol. Rev. la Univ. Costa Rica, vol. 24, núm. 2,
pp. 197–216, 2006.
[32] C. A. Smith, Automated Continuous Process Control. 2002.
[33] C. Smith y A. Corripio, Principles and Practice of Automatic Process Control, 2a ed.
1987.
[34] . M. Alfaro, “Identificación de modelos de orden reducido a partir de la curva de
reacción del proceso”, Cienc. y Tecnol. Rev. la Univ. Costa Rica, vol. 24, núm. 2,
pp. 197–216, 2006.
[35] C. A. Smith y A. B. Corripio, Principles and Practice of Automatic Process Control,
2a ed. 1987.
[36] T. E. Marlin, Process Control Designing Processes and Control Systems for
Dynamic Performance, 2a ed. Mc Graw Hll, 1995.
[37] C. Smith, Automated Continuous Process Control. Nueva York: Wiley-Interscience,
2002.
[38] D. E. Seborg, T. F. Edgar, D. A. Mellichamp, y F. J. Doyle, Process Dynamics and
Control, 3a ed. 2011.
[39] K. Ogata, Ingeniería de Control Moderna, vol. 1. 2010.
[40] B. Kuo, Sistemas de Control Automático, 7a ed. 1996.
100
[41] B. C. Kuo, Sistemas de Control Automático, 7a ed. 1996.
[42] Z. ao, Y. uang, y J. an, “An Alternative Paradigm For Control System Design”,
Proc. 40th IEEE Conf. Decis. Control. 2001., vol. 5, pp. 4578–4585, 2001.
[43] J. an, “From PID to Active Disturbance Rejection Control”, IEEE Trans. Ind.
Electron., vol. 56, núm. 3, pp. 900–906, 2009.
[44] . Zaidner, S. Korotkin, E. Shteimberg, A. Ellenbogen, M. Arad, y Y. Cohen, “ on
Linear PID and its application in Process Control”, 2010 IEEE 26th Conv. Electr.
Electron. Eng. Isr. IEEEI 2010, pp. 574–577, 2010.
[45] . shemese, “Design and PLC Implementation of onlinear PID Controllers for
Control of onlinear Processes”, Cape Peninsula University of echnology, .
[46] P. Proaño, L. Capito, A. Rosales, y O. Camacho, “A Dynamical Sliding Mode
Control Approach for Long Deadtime Systems”, Control. Decis. Inf. Technol., 2017.
[47] O. Camacho y C. Smith, “Sliding mode control: an approach to regulate nonlinear
chemical processes”, ISA Trans., vol. 39, núm. 2, pp. 205–218, 2000.
[48] J. Slotine y W. Li, Applied Nonlinear Control. New Jersey, 1991.
[49] . Rui y QiZhang, “Dynamic sliding mode control scheme for electro-hydraulic
position servo system”, Procedia Eng., vol. 24, pp. 28–32, 2011.
[50] I. A. Shkolnikov y Y. B. Shtessel, “ racking in a class of nonminimum-phase
systems with nonlinear internal dynamics via sliding mode control using method of
system center”, Automatica, vol. 38, pp. 837–842, 2002.
[51] A. J. Koshkouei y A. S. I. Zinober, “Robust frequency shaping slinding mode
control”, IEE Proceedings - Control Theory and Applications, vol. 147, núm. 3, pp.
312–320, 2000.
[52] A. J. Koshkouei, K. j. Burnham, y A. S. I. Zinober, “Dynamic sliding mode control
design”, IEE Proceedings - Control Theory and Applications, vol. 152, núm. 4, pp.
392–396, 2005.
[53] H. Sira-Ramírez, “Dynamical sliding mode control strategies in the regulation of
nonlinear chemical processes”, Int. J. Control, vol. 56, núm. 1, pp. 1–21, 1992.
[54] E. Báez, “Diseño y simulación de controladores Dinámicos por Modo Deslizante
aplicado a procesos no lineales aproximables a un modelo de primer orden con
retardo”, Escuela Politécnica acional, 8.
101
[55] . anta y A. Procházka, “Rational Approximation of ime Delay”, Inst. Chem.
Technol. Prague. Dep. Comput. Control Eng. Tech., vol. 5, núm. 166, p. 28, 2009.
[56] C. Bordons, Control Predictivo: Metodología , tecnología y nuevas perspectivas.
Almería, 2000.
[57] E. . . Camacho y C. Bordons, Model Predictive Control, 2a ed. 2007.
[58] J. Maciejowki, Predictive Control with Constraints. Prentice Hall, 2000.
[59] B. Huang y R. Kadali, Dynamic Modeling Predictive Control and Performance
Monitoring. Londres: Springer, 2008.
[60] E. Camacho y C. Bordons, Model Predictive Control, 2a ed. 2007.
[61] E. Camacho y C. Bordons, “Control predictivo: Pasado, Presente y Futuro.”, Rev.
Iberoam. Automática e Informática Ind., vol. 1, núm. 3, p. 24, 2004.
[62] R. Ranjan y A. Kalita, “Dynamic Matrix Control”, ational Institute of echnology.
[63] K. Karthik y . Karpagam, “Comparison of PID Controller uning echniques for a
FOPDT System”, Int. J. Curr. Eng. Technol., vol. 4, núm. 4, pp. 2667–2670, 2014.
[64] . R. Krüth, “Interior-point algorithms for quadratic programming”, Recent Dev.
Math. Program., p. 116, 2008.
[65] E. F. Camacho y C. Bordons, “Control predictivo: Pasado, Presente y Futuro.”,
Rev. Iberoam. Automática e Informática Ind., vol. 1, núm. 3, p. 24, 2004.
[66] L. Aguilera, “Conceptos Básicos de Farmacocinética Farmacodinamia en I A”,
Conceptos Básicos Farm. Farm. en TIVA, pp. 9–23, 2015.
[67] A. uyton y J. all, “Introducción a la fisiología : la célula y la fisiología general”, en
Tratado de fisiología médica, 12a ed., Elsiever, Ed. 2011, p. 112.
[68] K. Michael, Diccionario Oxford de Medicina y Ciencias del Deporte, Primera.
Barcelona, 2003.
[69] E. Mora y M. Vinocour, “Consideraciones clínicas sobre la importancia de la
sensibilidad a la insulina, su resistencia y la intolerancia a la glucosa”, ALAD Asoc.
Latinoam. Diabetes, vol. 15, núm. 2, pp. 67–72, 2007.
[70] M. R. Beitia, “Farmacología”, Más Dermatología, vol. 7, pp. 25–26, 2009.
102
6. ANEXOS
ANEXO I. Bomba de Insulina Paradigm 522 y 722.
ANEXO II. Leyes de control con variables de desviación.
ANEXO III. Gráficas de Error utilizadas en NPID.
ANEXO IV. Manual de usuario de la Interfaz Gráfica.
ANEXO V. Glosario de términos
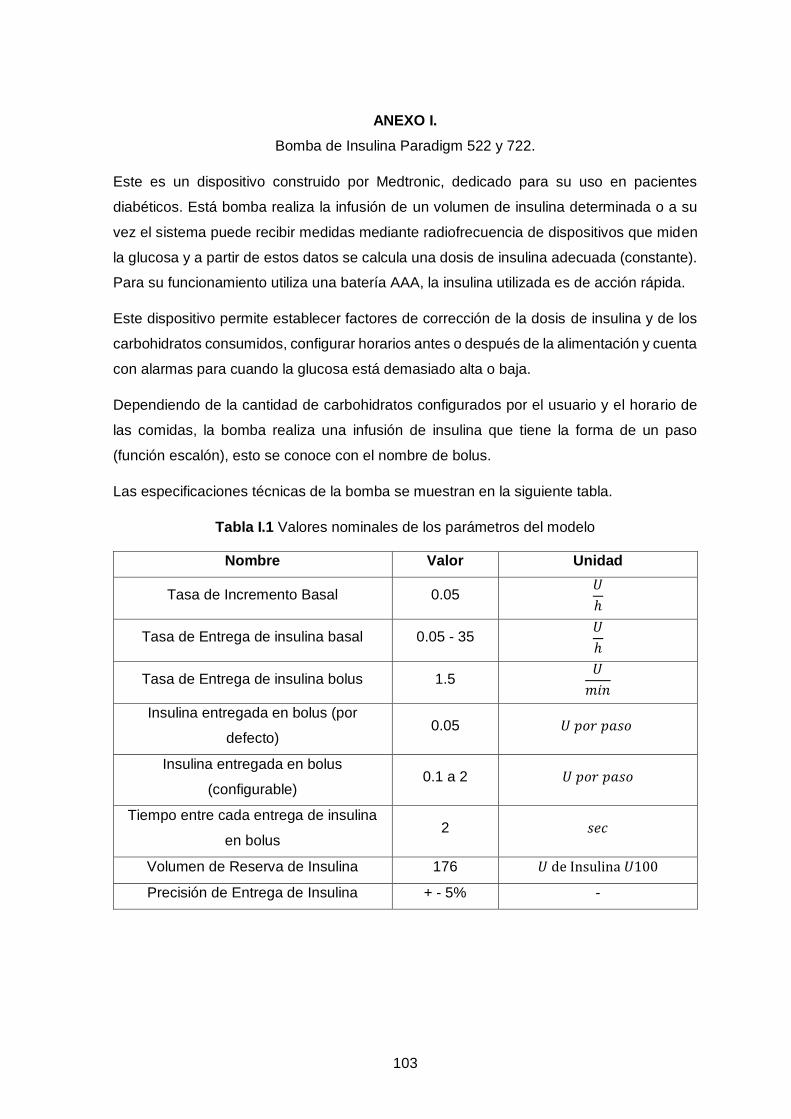
103
ANEXO I.
Bomba de Insulina Paradigm 522 y 722.
Este es un dispositivo construido por Medtronic, dedicado para su uso en pacientes
diabéticos. Está bomba realiza la infusión de un volumen de insulina determinada o a su
vez el sistema puede recibir medidas mediante radiofrecuencia de dispositivos que miden
la glucosa y a partir de estos datos se calcula una dosis de insulina adecuada (constante).
Para su funcionamiento utiliza una batería AAA, la insulina utilizada es de acción rápida.
Este dispositivo permite establecer factores de corrección de la dosis de insulina y de los
carbohidratos consumidos, configurar horarios antes o después de la alimentación y cuenta
con alarmas para cuando la glucosa está demasiado alta o baja.
Dependiendo de la cantidad de carbohidratos configurados por el usuario y el horario de
las comidas, la bomba realiza una infusión de insulina que tiene la forma de un paso
(función escalón), esto se conoce con el nombre de bolus.
Las especificaciones técnicas de la bomba se muestran en la siguiente tabla.
Tabla I.1 Valores nominales de los parámetros del modelo
Nombre Valor Unidad
Tasa de Incremento Basal 0.05 𝑈
ℎ
Tasa de Entrega de insulina basal 0.05 - 35 𝑈
ℎ
Tasa de Entrega de insulina bolus 1.5 𝑈
𝑚𝑖𝑛
Insulina entregada en bolus (por
defecto) 0.05 𝑈 𝑝𝑜𝑟 𝑝𝑎𝑠𝑜
Insulina entregada en bolus
(configurable) 0.1 a 2 𝑈 𝑝𝑜𝑟 𝑝𝑎𝑠𝑜
Tiempo entre cada entrega de insulina
en bolus 2 𝑠𝑒𝑐
Volumen de Reserva de Insulina 176 𝑈 de Insulina 𝑈100
Precisión de Entrega de Insulina + - 5% -

104
ANEXO II.
Leyes de control con variables de desviación.
Se debe tomar en cuenta que el diseño de este controlador se lo hace en variables de
desviación, por lo que para implementarlo en plantas con condiciones iniciales se debe
considerar que:
𝑚(𝑡) = �̅� ± 𝑈(𝑡)
Y las condiciones iniciales de la salida
𝑋𝑚−(𝑡) = 𝑋𝑚
−(𝑡) − �̅�
De allí se tiene la ley de control final que se aplica a la planta para los controladores
diseñados.
𝑚𝑃𝐼𝐷(𝑡) = �̅� + 𝑘𝑝 (𝑒(𝑡) +1
𝑇𝑖∙ ∫ 𝑒(𝑡) + 𝑇𝑑 ∙
𝑑𝑒(𝑡)
𝑑𝑡)
Ecuación II.1 Ley de control PID
𝑚𝑁𝑃𝐼𝐷 = �̅� + 𝑘𝑝 [ 𝑓𝑎𝑙(𝑒𝑝, 𝛼𝑝, 𝛿) +1
𝑇𝑖𝑓𝑎𝑙(𝑒𝑖 , 𝛼𝑖 , 𝛿) + 𝑇𝑑𝑓𝑎𝑙(𝑒𝑑 , 𝛼𝑑 , 𝛿)]
Ecuación II.2 Ley de control final PID no Lineal
𝑚𝐷𝑆𝑀𝐶(𝑡) = �̅� + ∫(𝜏𝜆
𝑘𝑡𝑓𝑒(𝑡) +
1
𝑘𝑡𝑓(𝑌𝑚
−(𝑡) − �̅�) −1
𝑡𝑓𝑈𝑐(𝑡))𝑑𝑡 + ∫𝐾𝐷𝑠𝑖𝑔𝑛(𝑆(𝑡))
Ecuación II.3 Ley de control final DSMC
𝑚𝐷𝑀𝐶 = 𝑢𝑘 = �̅� + ∆𝑈(𝑖) + 𝑢(𝑖 − 1)
Ecuación II.4 Ley de control DMC Donde:
∆𝑈 = 𝑢𝑘 − 𝑢𝑘−1

105
ANEXO III.
Gráficas de Error utilizadas en NPID.
De acuerdo con los valores sintonizados para el controlador NPID a continuación se
presenta la gráfica de la función no lineal del error. El valor de 𝛿 tiene el valor de 20.
Error Proporcional.
En este caso, la constante 𝛼𝑝 es 1.2, la gráfica es lineal hasta 𝛿 = 20 y el valor máximo
del error proporcional es 62.15.
e
y
y = fal (e,α,δ)
y = e/(δ^(1-α))
δ
Figura III.1 Error proporcional de NPID
Error Integral.
La gráfica del error integral que se presenta a continuación tiene el valor de 𝛼𝑖 de 0.8 y el
error integral máximo es de 10053 por lo cual la mayor parte de la parte integral del
controlador será no lineal.
y
e
y = fal (e,α,δ)y = e/(δ^(1-α))
δ
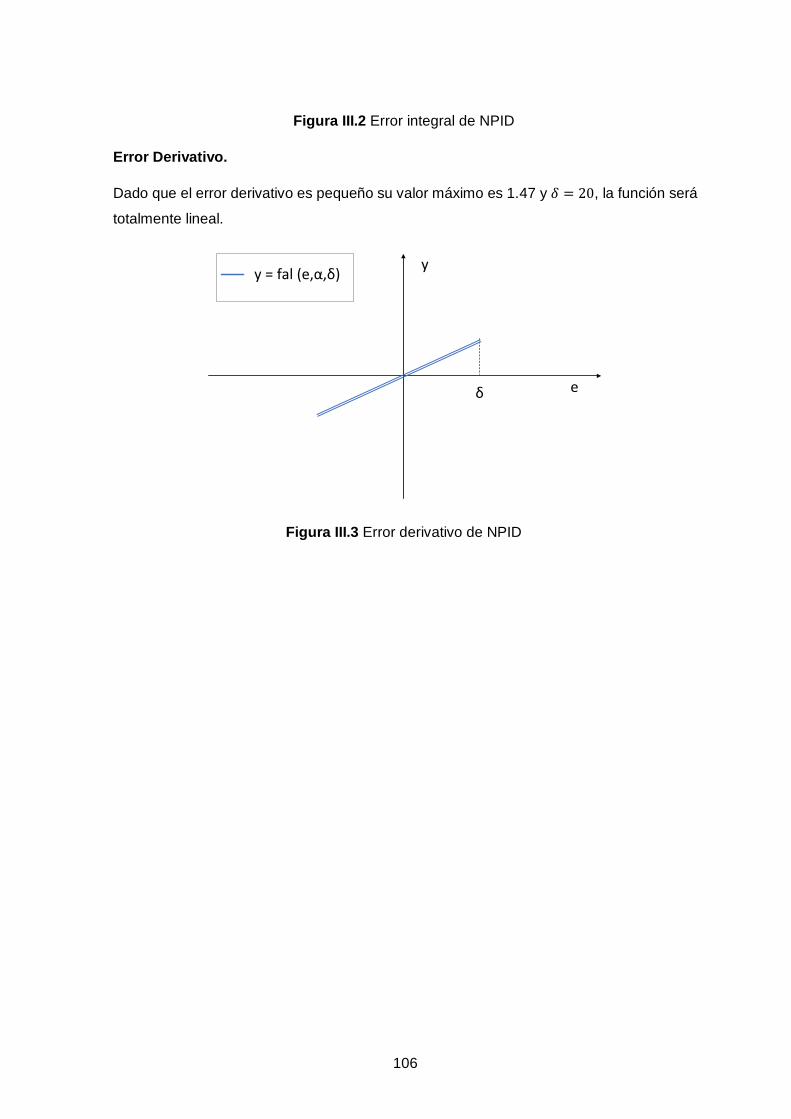
106
Figura III.2 Error integral de NPID
Error Derivativo.
Dado que el error derivativo es pequeño su valor máximo es 1.47 y 𝛿 = 20, la función será
totalmente lineal.
y
eδ
y = fal (e,α,δ)
Figura III.3 Error derivativo de NPID
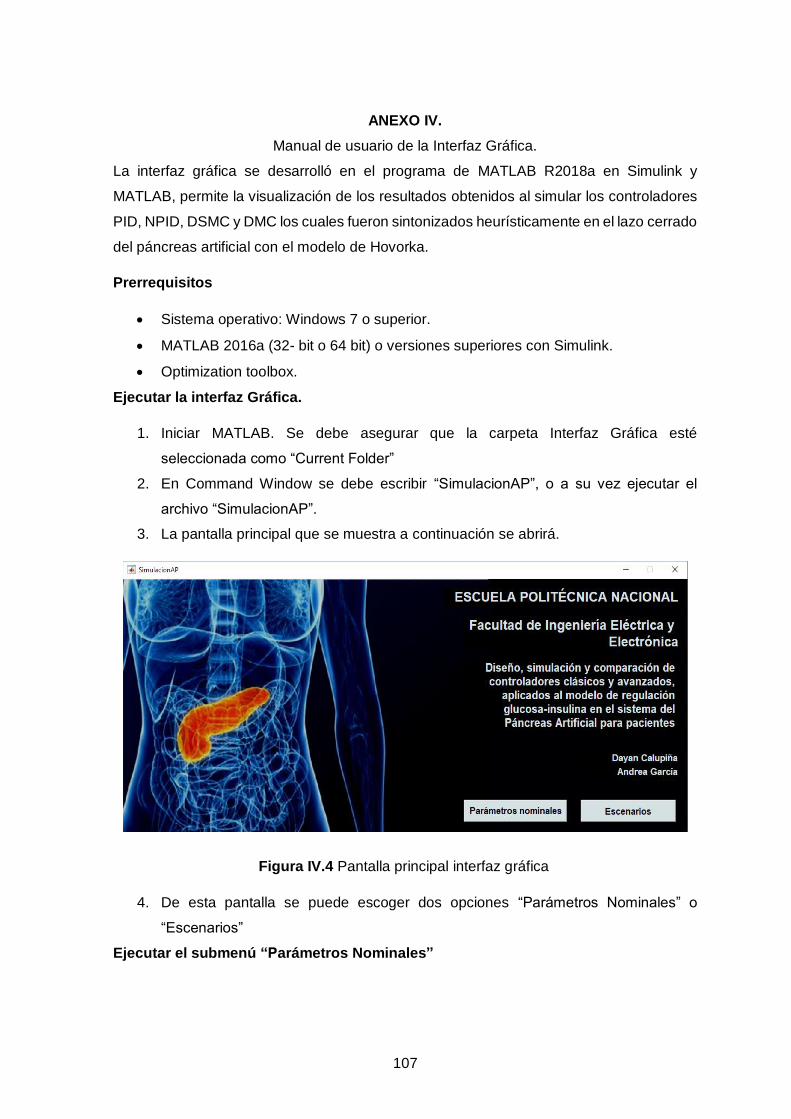
107
ANEXO IV.
Manual de usuario de la Interfaz Gráfica.
La interfaz gráfica se desarrolló en el programa de MATLAB R2018a en Simulink y
MATLAB, permite la visualización de los resultados obtenidos al simular los controladores
PID, NPID, DSMC y DMC los cuales fueron sintonizados heurísticamente en el lazo cerrado
del páncreas artificial con el modelo de Hovorka.
Prerrequisitos
• Sistema operativo: Windows 7 o superior.
• MATLAB 2016a (32- bit o 64 bit) o versiones superiores con Simulink.
• Optimization toolbox.
Ejecutar la interfaz Gráfica.
1. Iniciar MATLAB. Se debe asegurar que la carpeta Interfaz Gráfica esté
seleccionada como “Current Folder”
2. En Command Window se debe escribir “SimulacionAP”, o a su vez ejecutar el
archivo “SimulacionAP”.
3. La pantalla principal que se muestra a continuación se abrirá.
Figura IV.4 Pantalla principal interfaz gráfica
4. De esta pantalla se puede escoger dos opciones “Parámetros ominales” o
“Escenarios”
Ejecutar el submenú “Parámetros Nominales”
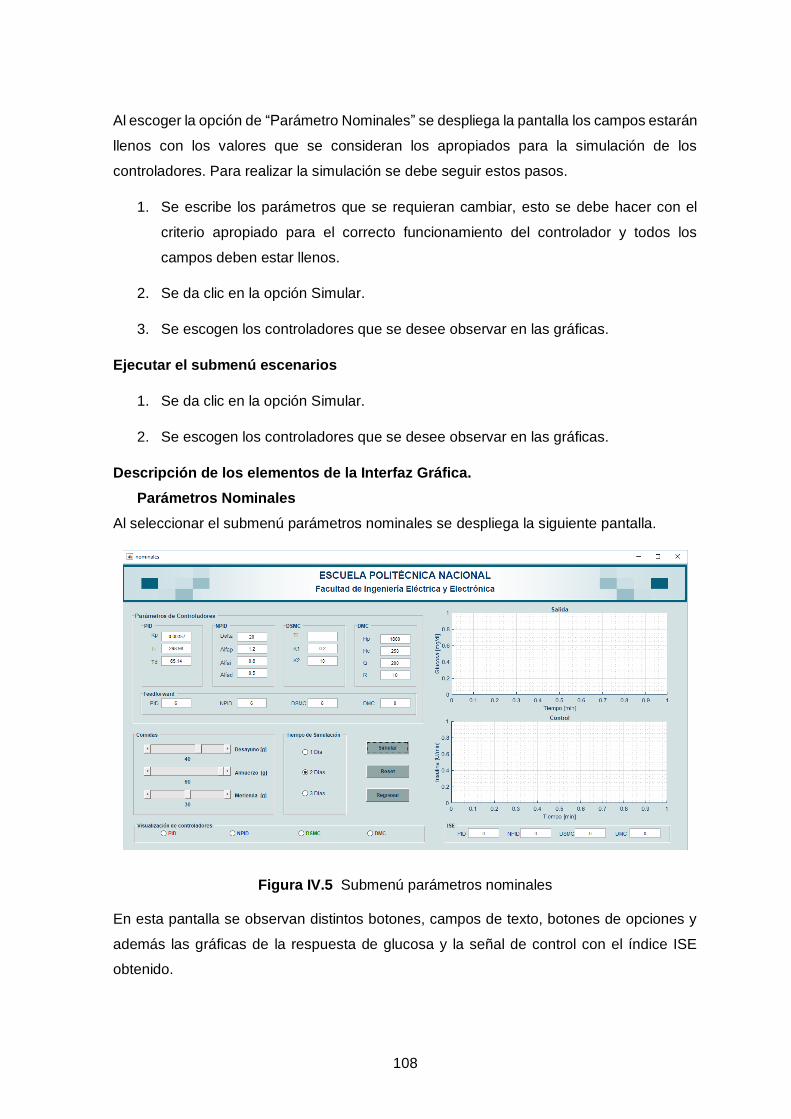
108
Al escoger la opción de “Parámetro Nominales” se despliega la pantalla los campos estarán
llenos con los valores que se consideran los apropiados para la simulación de los
controladores. Para realizar la simulación se debe seguir estos pasos.
1. Se escribe los parámetros que se requieran cambiar, esto se debe hacer con el
criterio apropiado para el correcto funcionamiento del controlador y todos los
campos deben estar llenos.
2. Se da clic en la opción Simular.
3. Se escogen los controladores que se desee observar en las gráficas.
Ejecutar el submenú escenarios
1. Se da clic en la opción Simular.
2. Se escogen los controladores que se desee observar en las gráficas.
Descripción de los elementos de la Interfaz Gráfica.
Parámetros Nominales
Al seleccionar el submenú parámetros nominales se despliega la siguiente pantalla.
Figura IV.5 Submenú parámetros nominales
En esta pantalla se observan distintos botones, campos de texto, botones de opciones y
además las gráficas de la respuesta de glucosa y la señal de control con el índice ISE
obtenido.
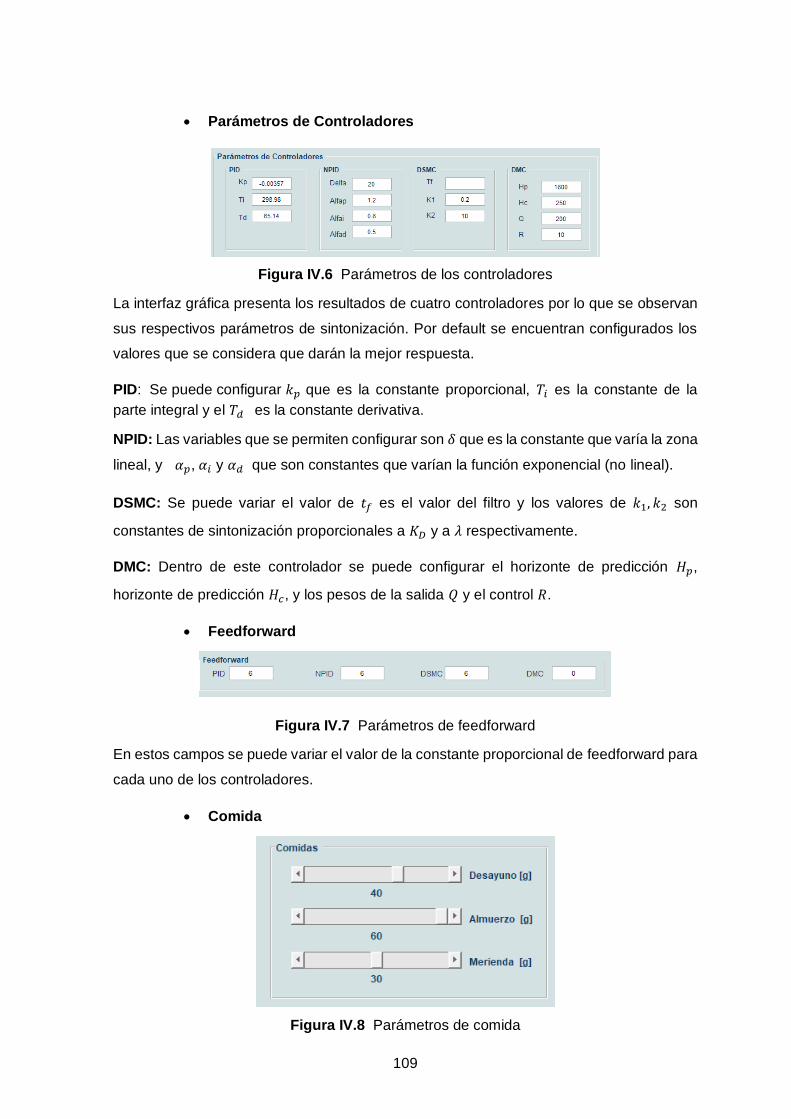
109
• Parámetros de Controladores
Figura IV.6 Parámetros de los controladores
La interfaz gráfica presenta los resultados de cuatro controladores por lo que se observan
sus respectivos parámetros de sintonización. Por default se encuentran configurados los
valores que se considera que darán la mejor respuesta.
PID: Se puede configurar 𝑘𝑝 que es la constante proporcional, 𝑇𝑖 es la constante de la
parte integral y el 𝑇𝑑 es la constante derivativa.
NPID: Las variables que se permiten configurar son 𝛿 que es la constante que varía la zona
lineal, y 𝛼𝑝, 𝛼𝑖 y 𝛼𝑑 que son constantes que varían la función exponencial (no lineal).
DSMC: Se puede variar el valor de 𝑡𝑓 es el valor del filtro y los valores de 𝑘1, 𝑘2 son
constantes de sintonización proporcionales a 𝐾𝐷 y a 𝜆 respectivamente.
DMC: Dentro de este controlador se puede configurar el horizonte de predicción 𝐻𝑝,
horizonte de predicción 𝐻𝑐, y los pesos de la salida 𝑄 y el control 𝑅.
• Feedforward
Figura IV.7 Parámetros de feedforward
En estos campos se puede variar el valor de la constante proporcional de feedforward para
cada uno de los controladores.
• Comida
Figura IV.8 Parámetros de comida
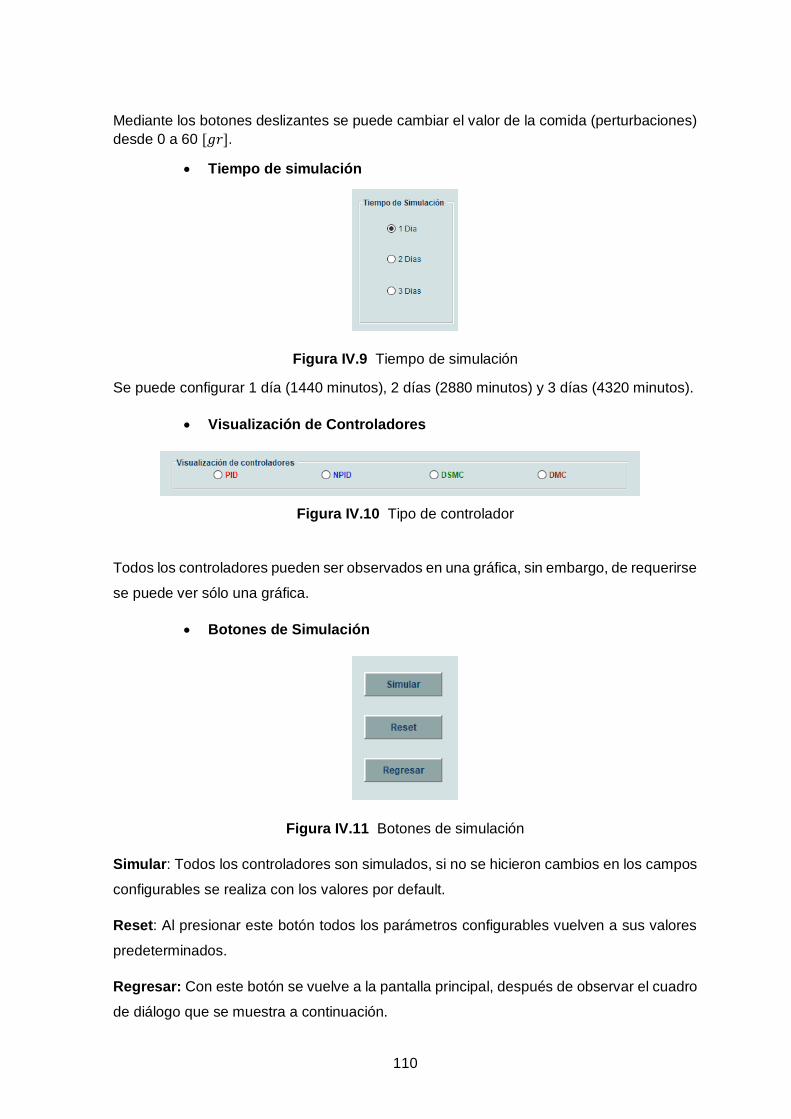
110
Mediante los botones deslizantes se puede cambiar el valor de la comida (perturbaciones)
desde 0 a 60 [𝑔𝑟].
• Tiempo de simulación
Figura IV.9 Tiempo de simulación
Se puede configurar 1 día (1440 minutos), 2 días (2880 minutos) y 3 días (4320 minutos).
• Visualización de Controladores
Figura IV.10 Tipo de controlador
Todos los controladores pueden ser observados en una gráfica, sin embargo, de requerirse
se puede ver sólo una gráfica.
• Botones de Simulación
Figura IV.11 Botones de simulación
Simular: Todos los controladores son simulados, si no se hicieron cambios en los campos
configurables se realiza con los valores por default.
Reset: Al presionar este botón todos los parámetros configurables vuelven a sus valores
predeterminados.
Regresar: Con este botón se vuelve a la pantalla principal, después de observar el cuadro
de diálogo que se muestra a continuación.
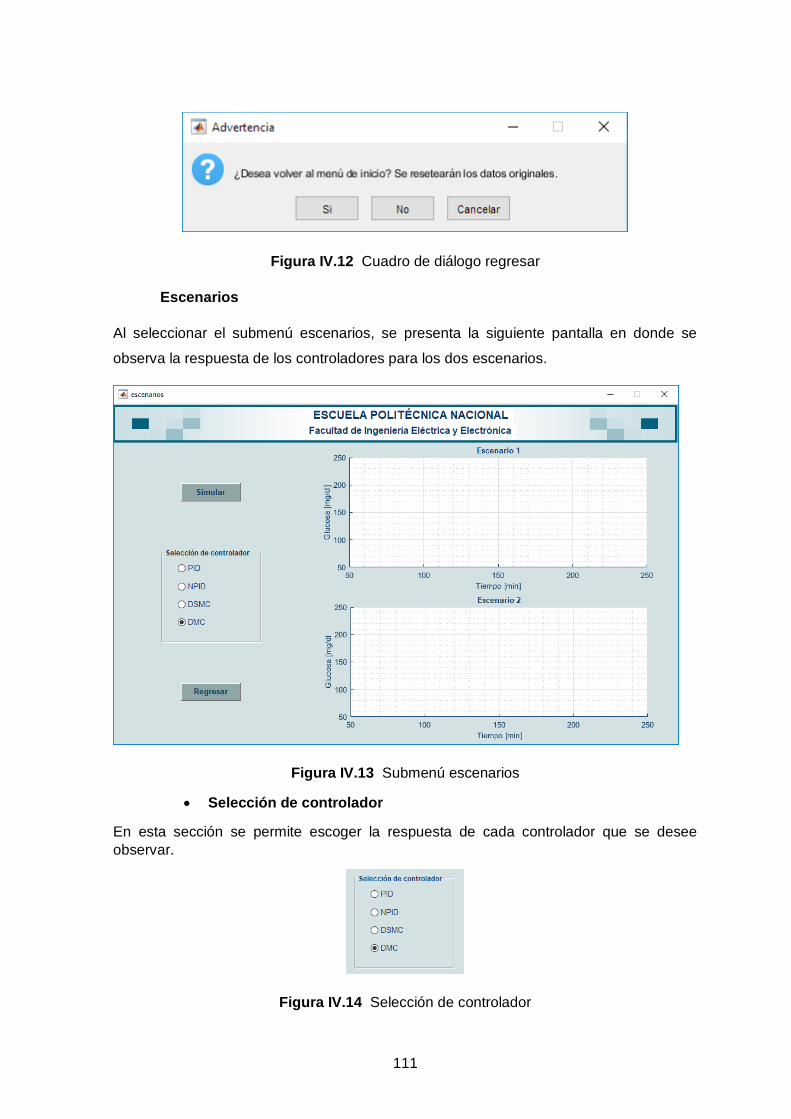
111
Figura IV.12 Cuadro de diálogo regresar
Escenarios
Al seleccionar el submenú escenarios, se presenta la siguiente pantalla en donde se
observa la respuesta de los controladores para los dos escenarios.
Figura IV.13 Submenú escenarios
• Selección de controlador
En esta sección se permite escoger la respuesta de cada controlador que se desee
observar.
Figura IV.14 Selección de controlador
112
• Botones de Simulación
Figura IV.15 Botones de simulación en escenarios
Mediante el botón de simular se corre las simulaciones de los cuatro controladores, y con
el botón regresar se vuelve al menú principal, después de responder al cuadro de diálogo
de la Figura IV.16.
Figura IV.16 Cuadro de diálogo regresar
113
ANEXO V.
Glosario de términos
Compartimento.- Es una herramienta que permiten describir y predecir la evolución del
efecto de un fármaco en el organismo, para lo que se considera al organismo dividido en
una serie de compartimentos que representan espacios teóricos pero que no se ajustan a
ningún espacio anatómico exclusivo, sino que pueden englobar más de uno [66]. Los
compartimentos líquidos se dividen en intracelular (dentro de la célula) y extracelular que
se divide en líquido intersticial y plasma sanguíneo [67].
Líquido intersticial.- Es el líquido que baña los espacios intercelulares y a través del cual
se produce un intercambio de materiales entre la sangre y las células[68].
Sensibilidad insulina.- Es la respuesta normal de los tejidos a la acción de la insulina [69].
Es decir, relaciona la cantidad de insulina que se necesita para depositar una cantidad
determinada de glucosa.
Biodisponibilidad fraccional.- Es la fracción de la dosis administrada de fármaco que
llega inalterada al torrente circulatorio [70].
Resistencia a la insulina.- Es la respuesta biológica disminuida en los tejidos blancos,
principalmente músculo, hígado y grasa a los efectos biológicos de esta hormona [69].
Tiempo máximo.- Es el tiempo que indica el momento en el que el fármaco alcanza su
concentración máxima en sangre [70].

114
ORDEN DE EMPASTADO

















![1983] IRVINE: WODYETIA, A NEW GENUS 165media.e-taxonomy.eu/palmae/protologe/palm_tc_214814_P.pdf · ing), Buchanania arborescens, ... foot of the granite boulder hills. Here it. 19831](https://img.pdfslide.net/doc/110x75/6064c333022b79704766575d/1983-irvine-wodyetia-a-new-genus-165mediae-ing-buchanania-arborescens-.jpg)










