Embed Size (px)
DESCRIPTION
Sa se proiecteze un sistem de reglare automata a temperaturii de iesire a unui schimbator de caldura, in interiorul caruia se amesteca doua debite ale unui fluid(apa).
Citation preview
ESRA-PROIECT
A.Tema proiectului
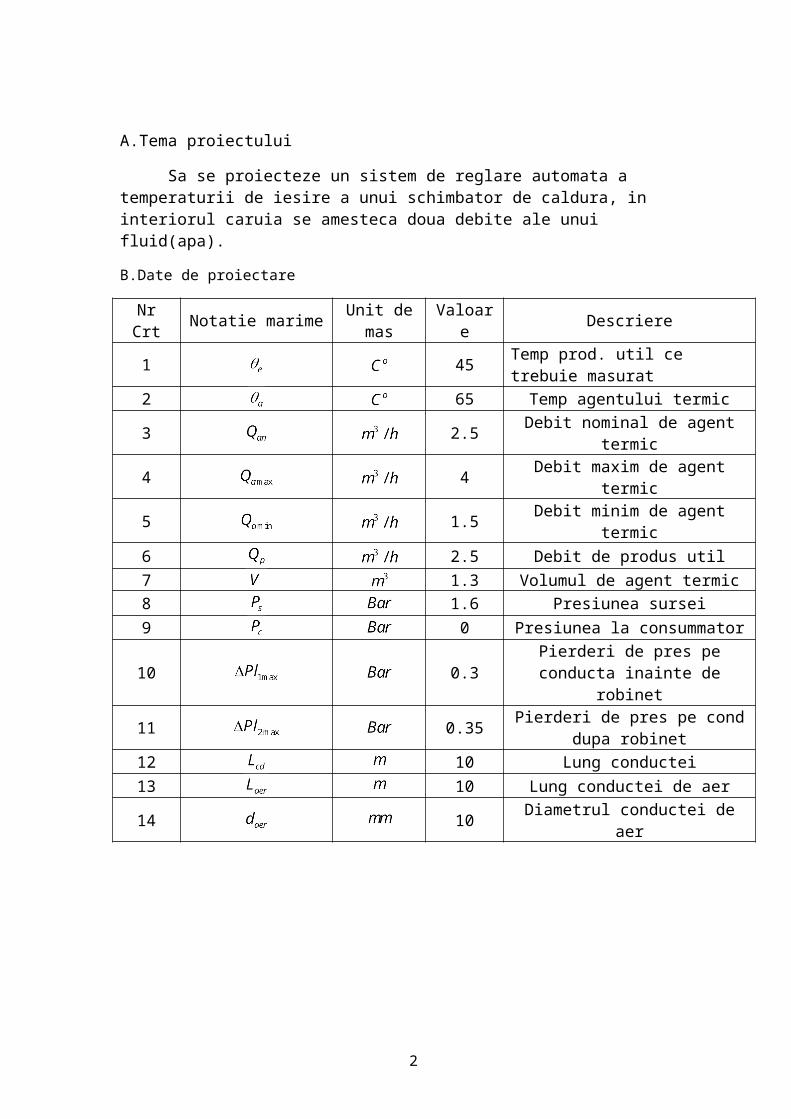
Sa se proiecteze un sistem de reglare automata a temperaturii de iesire a unui schimbator de caldura, in interiorul caruia se amesteca doua debite ale unui fluid(apa).
B.Date de proiectare
Nr Crt Notatie marime Unit de mas Valoare Descriere
1 45 Temp prod. util ce trebuie masurat
2 65 Temp agentului termic
3 2.5 Debit nominal de agent termic
4 4 Debit maxim de agent termic
5 1.5 Debit minim de agent termic
6 2.5 Debit de produs util
7 1.3 Volumul de agent termic
8 1.6 Presiunea sursei
9 0 Presiunea la consummator
10 0.3Pierderi de pres pe conducta inainte
de robinet
11 0.35Pierderi de pres pe cond dupa
robinet12 10 Lung conductei
13 10 Lung conductei de aer
14 10 Diametrul conductei de aer
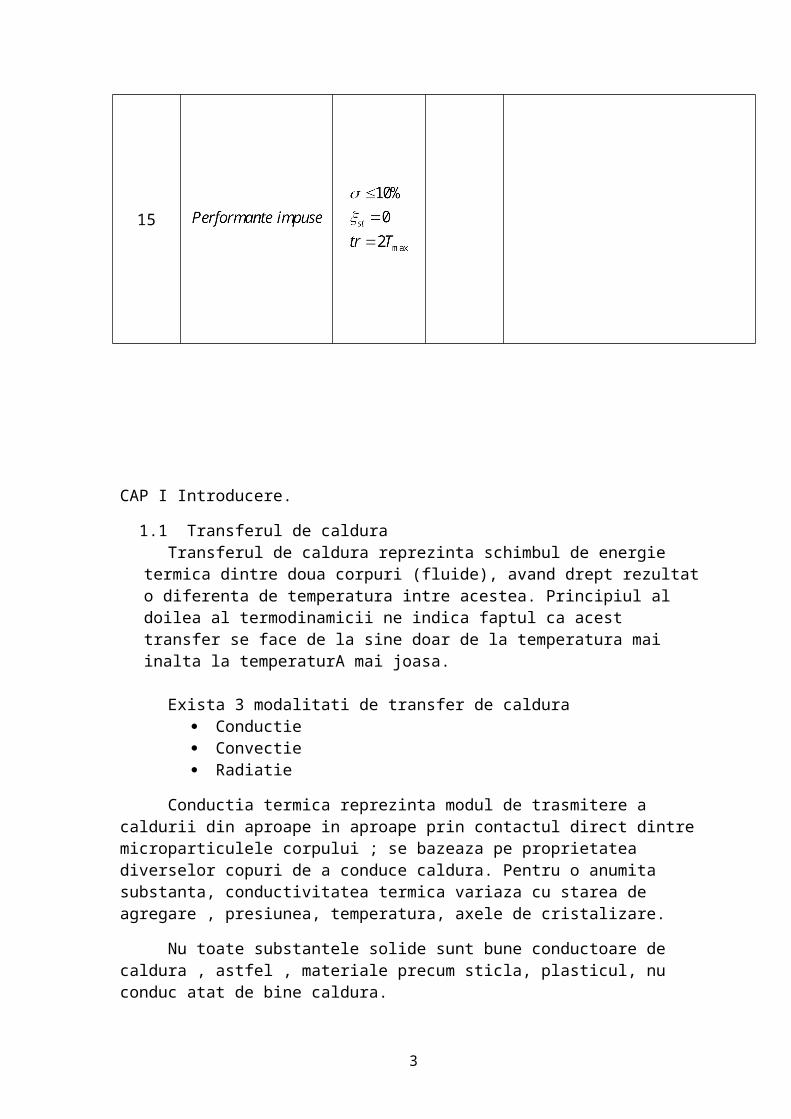
15
CAP I Introducere.
2
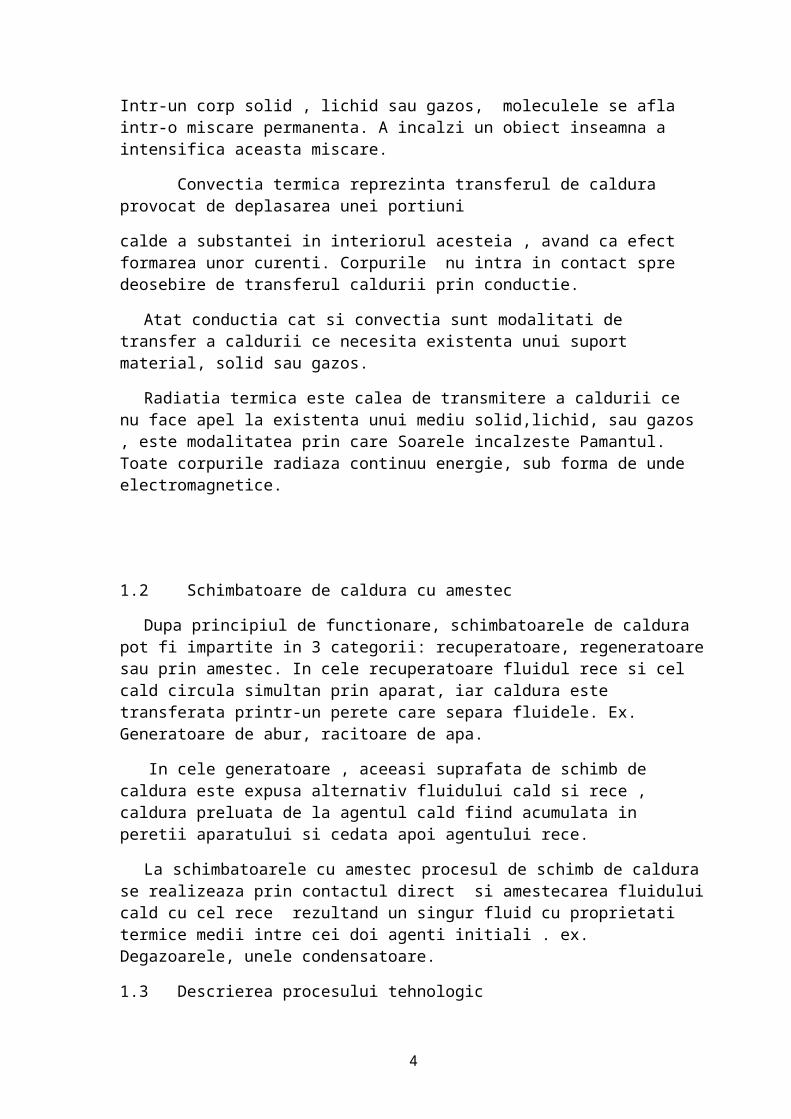
1.1 Transferul de calduraTransferul de caldura reprezinta schimbul de energie termica dintre doua corpuri
(fluide), avand drept rezultat o diferenta de temperatura intre acestea. Principiul al doilea al termodinamicii ne indica faptul ca acest transfer se face de la sine doar de la temperatura mai inalta la temperaturA mai joasa.
Exista 3 modalitati de transfer de caldura Conductie Convectie Radiatie
Conductia termica reprezinta modul de trasmitere a caldurii din aproape in aproape prin contactul direct dintre microparticulele corpului ; se bazeaza pe proprietatea diverselor copuri de a conduce caldura. Pentru o anumita substanta, conductivitatea termica variaza cu starea de agregare , presiunea, temperatura, axele de cristalizare.
Nu toate substantele solide sunt bune conductoare de caldura , astfel , materiale precum sticla, plasticul, nu conduc atat de bine caldura.
Intr-un corp solid , lichid sau gazos, moleculele se afla intr-o miscare permanenta. A incalzi un obiect inseamna a intensifica aceasta miscare.
Convectia termica reprezinta transferul de caldura provocat de deplasarea unei portiuni
calde a substantei in interiorul acesteia , avand ca efect formarea unor curenti. Corpurile nu intra in contact spre deosebire de transferul caldurii prin conductie.
Atat conductia cat si convectia sunt modalitati de transfer a caldurii ce necesita existenta unui suport material, solid sau gazos.
Radiatia termica este calea de transmitere a caldurii ce nu face apel la existenta unui mediu solid,lichid, sau gazos , este modalitatea prin care Soarele incalzeste Pamantul. Toate corpurile radiaza continuu energie, sub forma de unde electromagnetice.
1.2 Schimbatoare de caldura cu amestec
Dupa principiul de functionare, schimbatoarele de caldura pot fi impartite in 3 categorii: recuperatoare, regeneratoare sau prin amestec. In cele recuperatoare fluidul rece si cel cald circula simultan prin aparat, iar caldura este transferata printr-un perete care separa fluidele. Ex. Generatoare de abur, racitoare de apa.
In cele generatoare , aceeasi suprafata de schimb de caldura este expusa alternativ fluidului cald si rece , caldura preluata de la agentul cald fiind acumulata in peretii aparatului si cedata apoi agentului rece.
La schimbatoarele cu amestec procesul de schimb de caldura se realizeaza prin contactul direct si amestecarea fluidului cald cu cel rece rezultand un singur fluid cu proprietati termice medii intre cei doi agenti initiali . ex. Degazoarele, unele condensatoare.
1.3 Descrierea procesului tehnologic
3
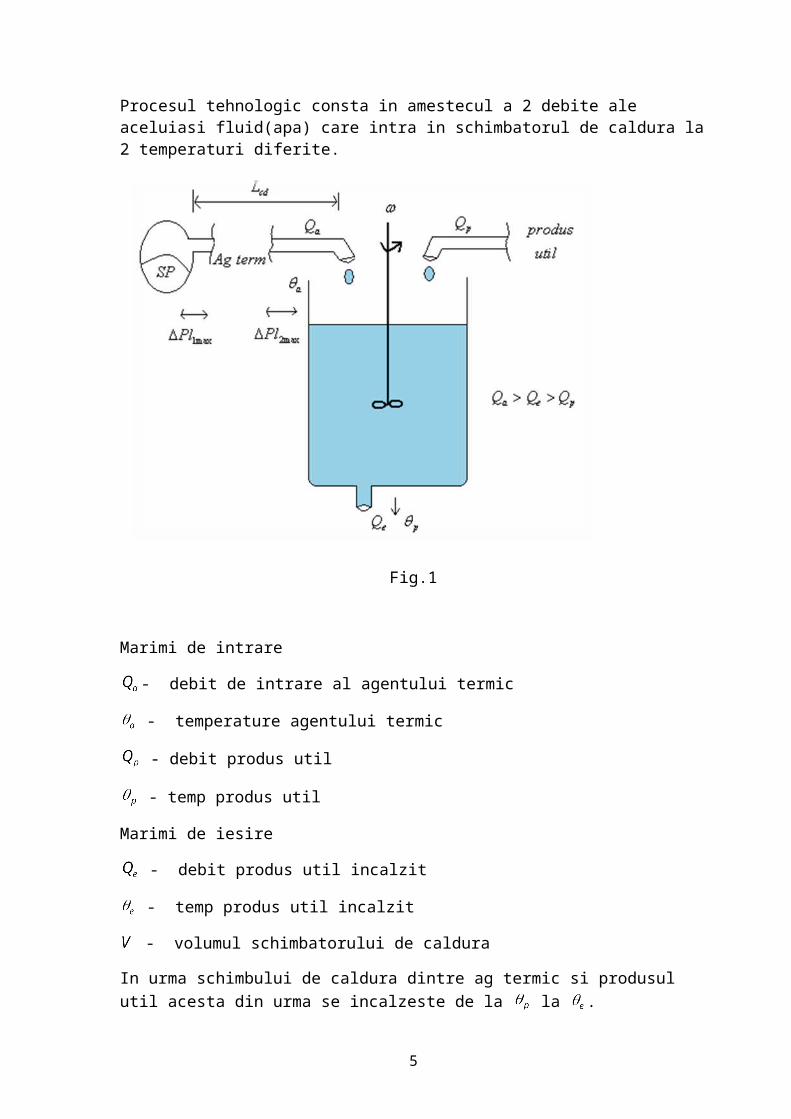
Procesul tehnologic consta in amestecul a 2 debite ale aceluiasi fluid(apa) care intra in schimbatorul de caldura la 2 temperaturi diferite.
Fig.1
Marimi de intrare
- debit de intrare al agentului termic
- temperature agentului termic
- debit produs util
- temp produs util
Marimi de iesire
- debit produs util incalzit
- temp produs util incalzit
- volumul schimbatorului de caldura
In urma schimbului de caldura dintre ag termic si produsul util acesta din urma se incalzeste de la la .
Ipoteze simplificatoare utilizate in modelarea matematica a schimbatorului de caldura:
4
1. Temp in intreg volumul a schimbatorului de caldura este uniforma;2. Cantitatea de caldura degajata in ext este nesemnificativa;3. Cantitatea de caldura inmagazinata in izolatie este neglijabila;
CAP II Alegerea solutiei de reglare
2.1 Principii de reglare
P. abaterii
P compensarii
Combinat
Reglare dupa stare
Cascada
Sistemele de reglare pentru temperatura utilizate in practica automatizarilor industriale sunt realizate prin structuri de reglare dupa eroare (abatere), sau in cele mai multe cazuri prin structuri evoluate de cascada sau de reglare combinata dupa eroare si dupa perturbatie.
Principiul abaterii
In cadul principiului abaterii,IT I se asociaza un dispozitiv de automatizare(DA) compus din traductorul de reactie Tr,amplificatorul de eroare A(sau regulator) si un element de executie EE.Utilizandu-se o reactie negativa dupa marimea de iesire se asigura mentinerea acestei marimi la o valoare corespunzatoare marimii de intrare ,independent de cauzele care provoaca abaterea primei marimi fata de cea de-a doua.Avem deci un sistem de reglare automata in circuit inchis,deoarece marimea de iesire Xe actioneaza prin intermediul legaturii de reactie negative tot asupra marimii de iesire.
Principiul compensarii influentei marimilor perturbatoare sau reactia dupa marimea perturbatoare.
5
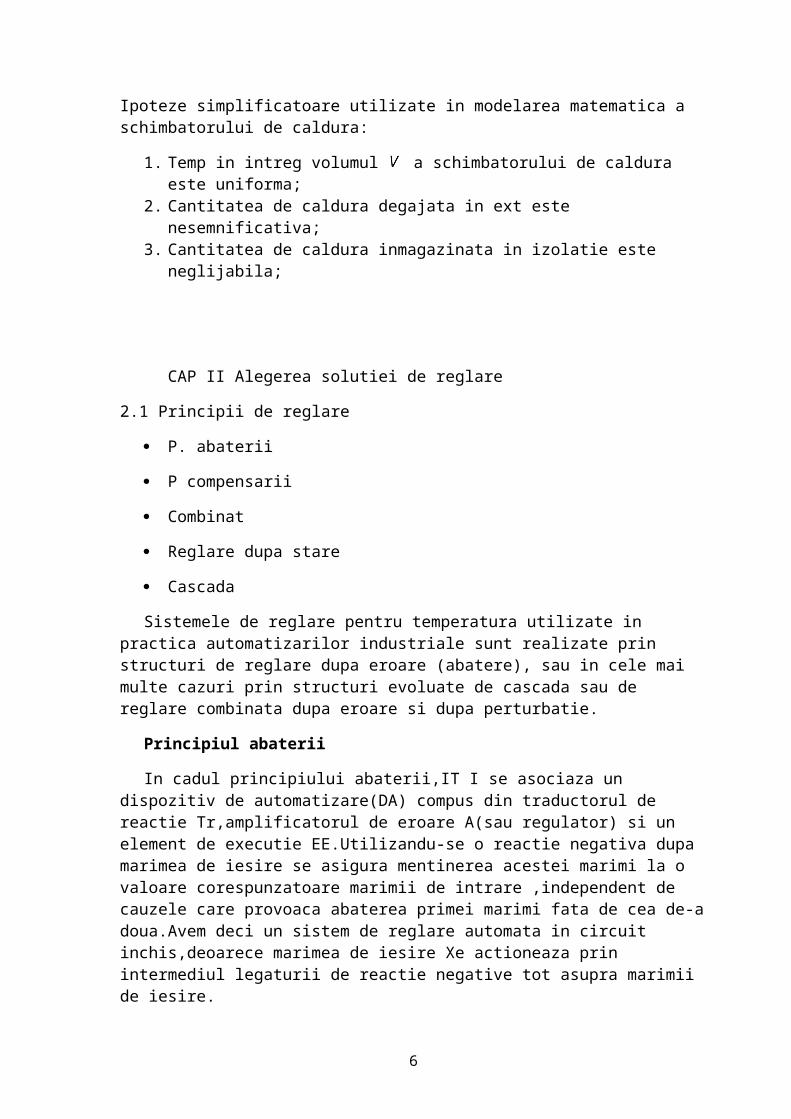
In cazul acestui principiu se foloseste reactia pozitiva si se ia dupa o anumita perturbatie,prin intermediul unui traducator corespunzator Tp.In marimea de executie se introduce o componenta ,dependenta de nivelul perturbatiei controlate,care asigura mentinerea parametrului reglat la valoarea impusa,in prezenta variatiilor marimii perturbatoare.
Principiul combinat sau cu reactiile dupa marimea de iesire si marimile perturbatoare.
Principiul combinat are avantajul ca permite compensarea totala sau partiala a influentei perturbatiei principale masurate si diminuarea influentelor celorlalte marimi perturbatoare asupra marimii de iesire.
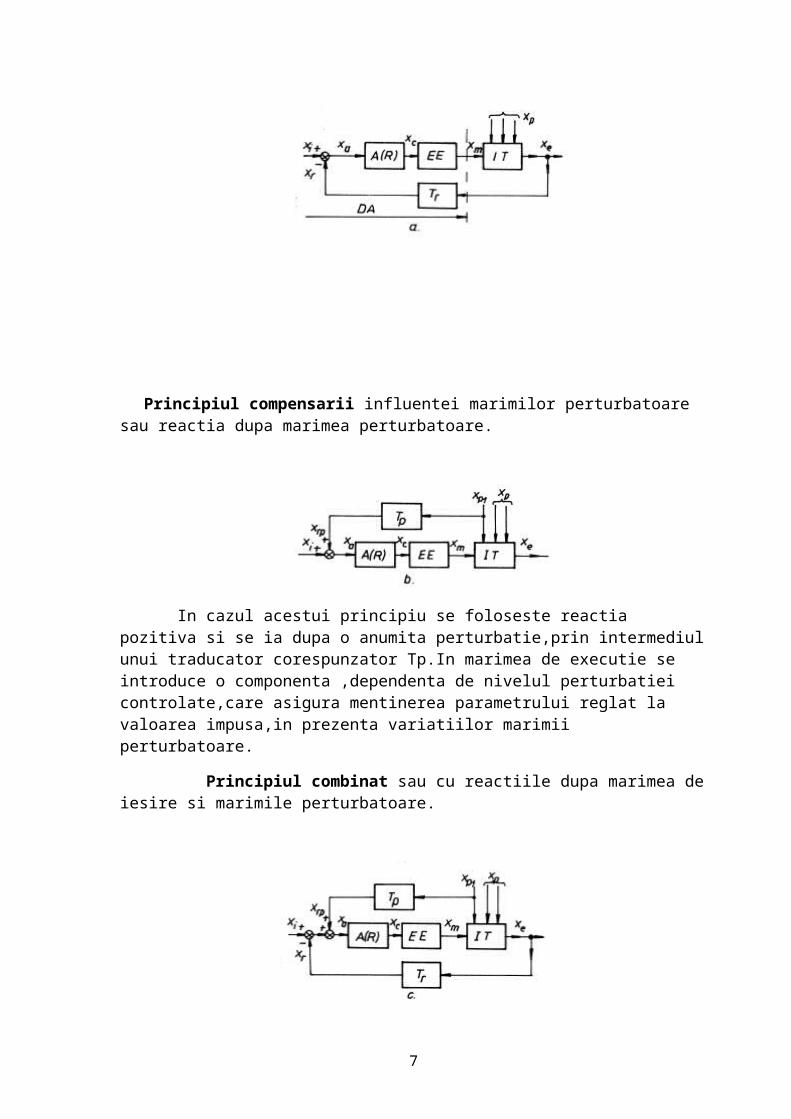
Principiul de reglare cu reactie dupa stare.
Pentru procesele tehnologice reprezentate in forma intrare-stare-iesire,cel mai simplu algoritm decisional consta in utilizarea unei reactii proportionale dupa starea sisatemului.Legea de reglare de tipul reactie dupa stare,este de forma: u=-k*v+M*v. Alocarea completa a valorilor proprii ale sistemului automat este posibila numai in situatia in care procesul este complet controlabil.
Reglarea in cascada
6
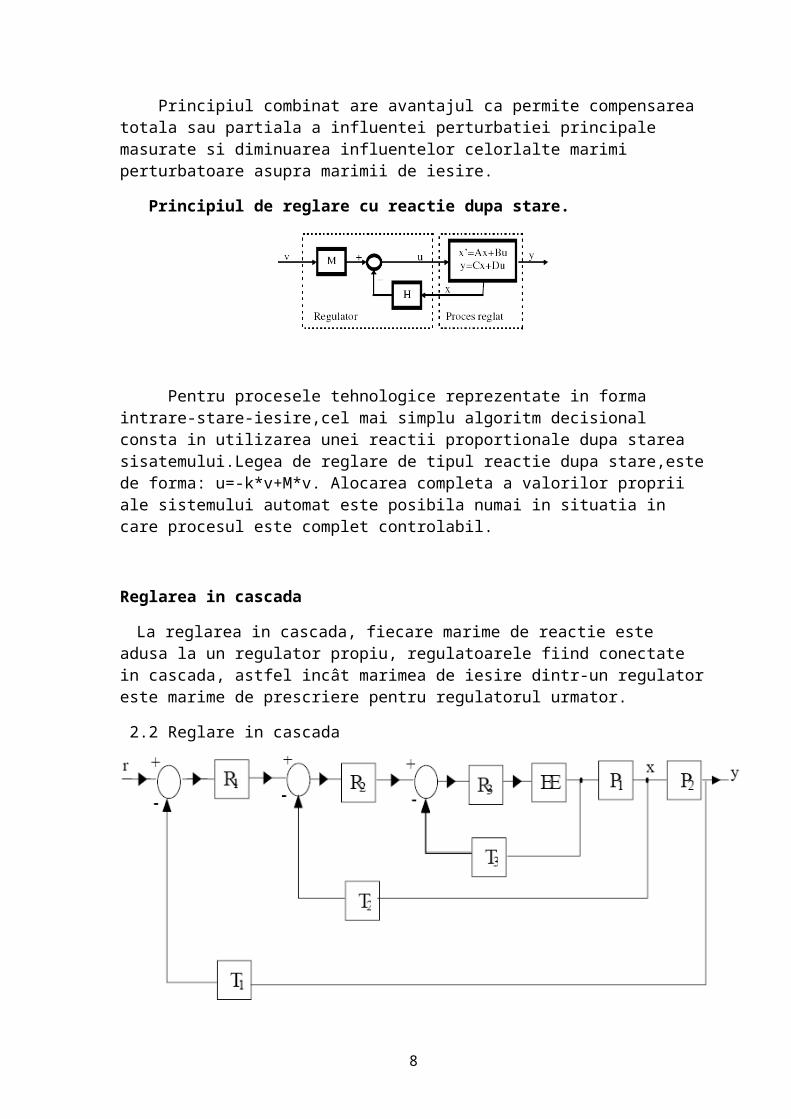
La reglarea in cascada, fiecare marime de reactie este adusa la un regulator propiu, regulatoarele fiind conectate in cascada, astfel incât marimea de iesire dintr-un regulator este marime de prescriere pentru regulatorul urmator.
2.2 Reglare in cascada
In figura de mai sus este reprezentata schema bloc pentru o schema de reglare in cascada care utilizeaza trei marimi de reactie. In aceasta schema: R1, R2, R3 sunt regulatoare, T1, T2, T3 - traductoare, EE – element de executie; blocurile P1 si P2 formeaza procesul si au fost separate pentru a evidentia marimea intermediara x, folosita in cadrul reglarii in cascada. Se observa ca s-au format mai multe bucle de reglare interioare una alteia. Regula de aranjare a buclelor este urmatoarea: bucla exterioara corespunde intotdeauna marimii reglate y; cu cât se merge spre interior, se introduc bucle din ce in ce mai rapide, caracterizate de constante de timp tot mai mici.Din aceasta dispunere rezulta principalul avantaj al acestei structuri: efectul unei perturbatii care actioneaza intr-o bucla interioara este anihilat rapid, resimtindu-se doar in mica masura asupra marimii reglate y; rezulta deci posibilitatea de a obtine o buna comportare a sistemului in ansamblu, cu performante ridicate. Reglarea in cascada prezinta si alte avantaje, cum ar fi: - posibilitatea de a asigura limitarea unor marimi din sistem; aceasta deriva din existenta reactiilor negative dupa marimile respective, dar se poate asigura chiar limitarea la o anumita valoare precizata; in acest scop, se prevede limitarea marimii de prescriere a buclei interioare de reglare pentru marimea respectiva; astfel, daca se doreste, de exemplu, limitarea marimii x din fig. 1 la o valoare xM, se limiteaza marimea de iesire din regulatorul R1 la valoarea xM.kT2, unde kT2 este factorul de amplificare al traductorului T2; in acest scop se poate prevedea un circuit special de limitare (realizat, de exemplu, cu diode si rezistente), sau, mai simplu, se va va asigura ca valoarea mentionata sa coincida cu semnalul de saturatie de la iesrea regulatorului R2; - posibilitatea de a diviza un proces in subprocese (de exemplu, subprocesele P1 si P2 din fig. 1),ceea ce permite un control mai bun al diverselor marimi; mai mult, in unele cazuri, aceasta divizare asigura posibilitatea realizarii sintezei prin anumite proceduri; o astfel de situatie apare, de exemplu, in cazul in care sinteza se realizeaza pe baza criteriilor modulului sau simetriei (frecvent folosite, mai ales pentru sistemele de reglare a proceselor rapide); aceste criterii apeleaza la compensarea constantelor de timp ale procesului (regulatorul este astfel ales incât zerourile din functia sa de transfer sa fie aceleasi cu polii f.d.t. a procesului, deci sa
7
se simplifice); daca se utilizeaza un regulator PID, trebuie avut in vedere ca acesta poate compensa doar doi poli (doua constante de timp); prin urmare, daca procesul este de ordin mai mare ca doi, solutionarea se poate face prin divizarea in subprocese de ordin cel mult doi si compensarea separata, intr-o structura adecvata ( cel mai frecvent – in cascada). Acordarea regulatoarelor la schemele in cascada se realizeaza relativ simplu. Se incepe cu bucla interioara; dupa acordarea regulatorului respectiv (R3), intreaga bucla devine fixata si ea completeaza partea fixata a buclei urmatoare; la aceasta bucla, singurul element necunoscut este acum regulatorul R2, care se stabileste printr-o procedura oarecare, apoi se trece la bucla urmatoare etc. Nu este obligatoriu sa se foloseasca acelasi criteriu de acordare pentru toate buclele. Structurile in cascada se folosesc atât la reglarea proceselor rapide, cât si a celor lente. Astfel, la reglarea vitezei (proces rapid) unui motor electric, in prezent se folosesc aproape in exclusivitate scheme in cascada. In mod frecvent se foloseste o bucla interioara de reglare a curentului si o bucla exterioara de reglare a vitezei; in unele cazuri se mai folosesc si alte marimi de reactie. Pentru sistemele de urmarire de pozitionare se folosesc, de asemenea, structuri in cascada: fata de sistemul de reglare a vitezei, se mai introduce o bucla exterioara de reglare a pozitiei. In acest caz se poate folosi schema din fig.1, in care R1 este regulatorul de pozitie, R2 - regulatorul de viteza, iar R3 – regulatorul de curent. Lucrarea de fata se refera tocmai la reglarea in cascada a vitezei unui motor de c.c. cu excitatie separata.
Reglarea in cascada este utilizata atât in cadrul proceselor rapide cât si in cazul proceselor lente, cu timp mort.
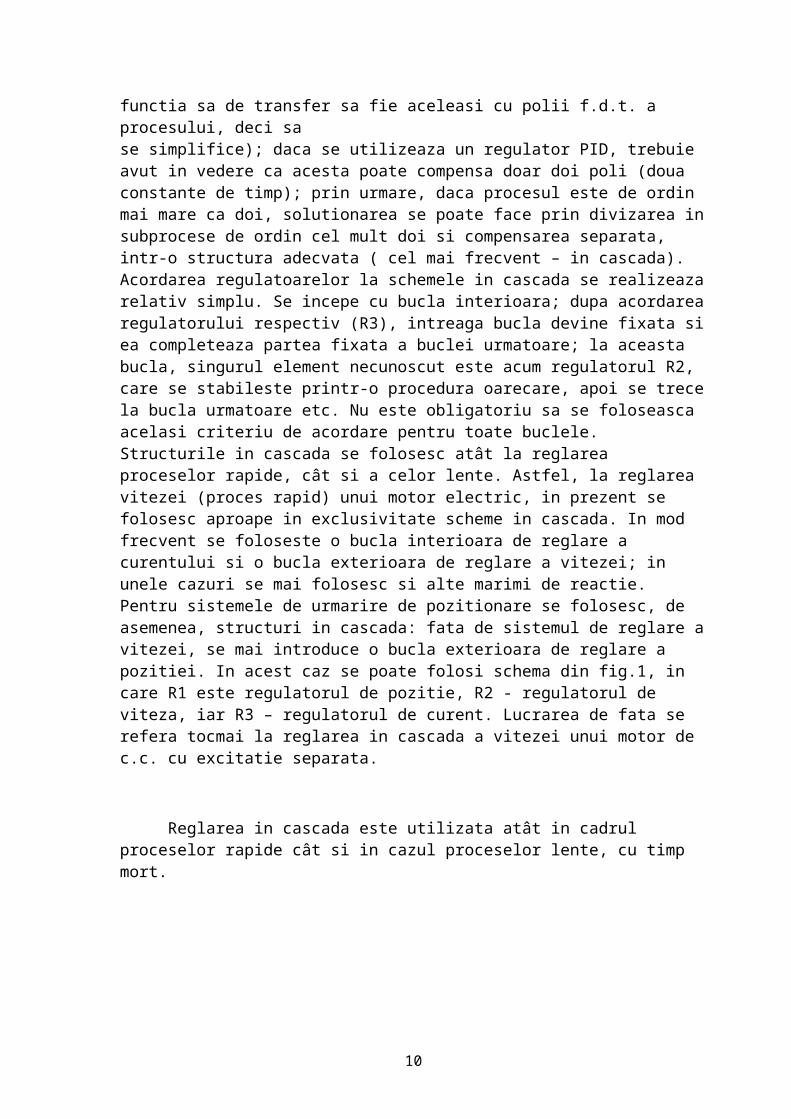
Reglarea in cascada este conexiunea tipica intre bucla principala pentru reglarea temperaturii si bucla secundara pentru reglarea debitului de agent termic. Daca bucla secundara are o dinamica mult mai rapida, comparativ cu bucla principala, atunci sistemul de reglare pe ansamblu este invariant la fluctuatiile nedorite ale debitului de agent termic.
Ramane ca perturbatie importanta, chiar si pentru aceasta structura de reglare in cascada, debitul de produs ce urmeaza sa faca schimb de caldura cu agentul termic.
Structura de reglare in cascada reprezinta un caz particular al structurii generale si este caracterizat prin:
8
Posibilitate ordonarii marimilor pe directia cauzala marime de comanda-marime reglata, cu evidentierea unor subprocese inseriate si cu o reprezentare pe subprocese a(punctelor de aplicare) a perturbatiilor importante.
Descompunerea compensatorului intr-un set de controllere conectate in cascada.
Sistem de reglare in cascada 2 bucle
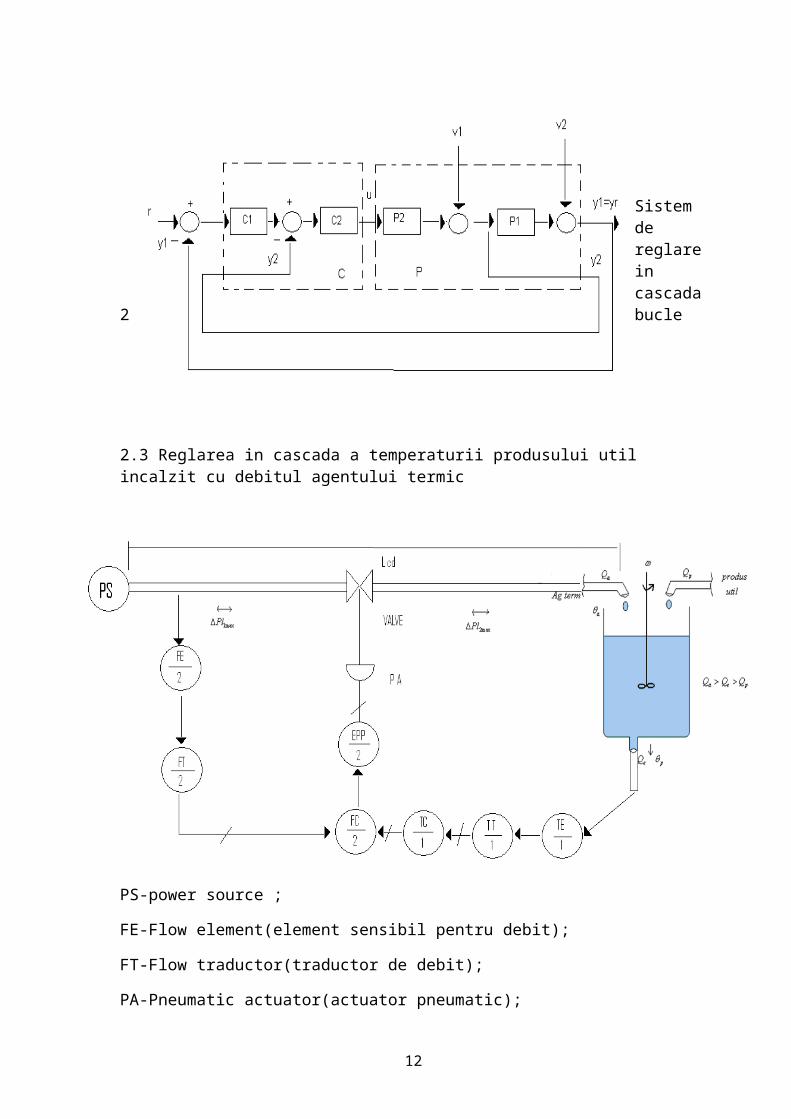
2.3 Reglarea
in cascada a temperaturii produsului util incalzit cu debitul agentului termic
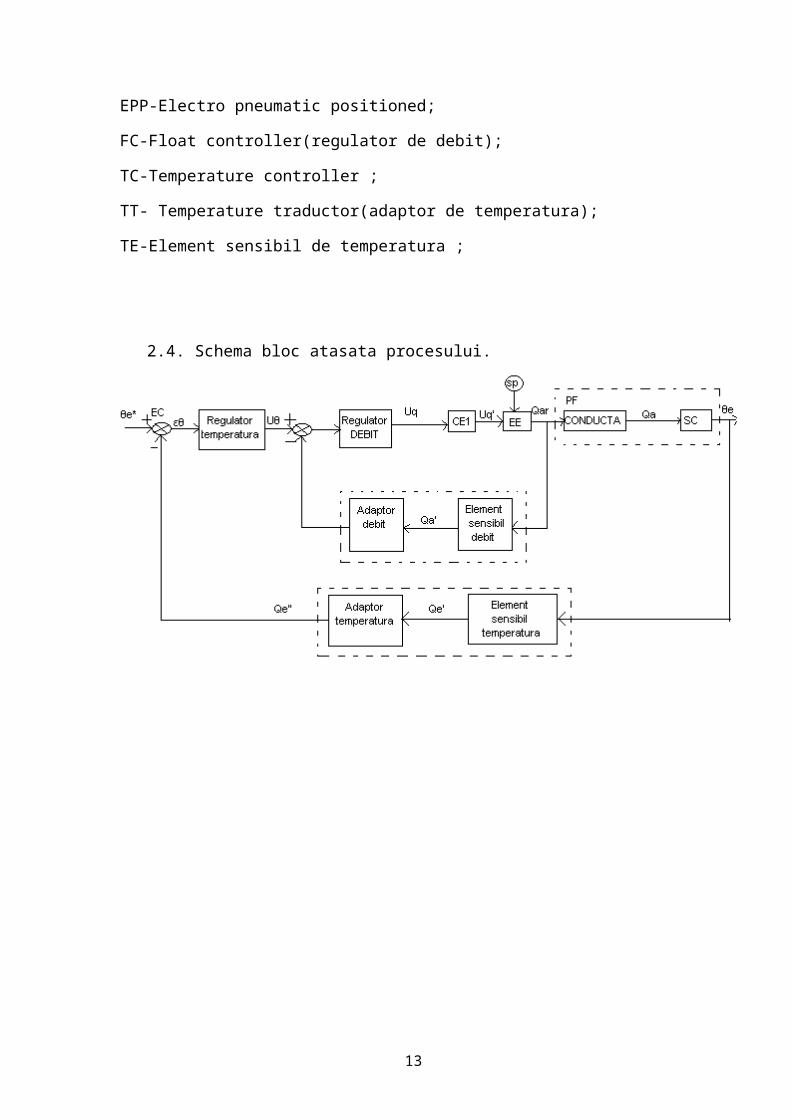
PS-power source ;
FE-Flow element(element sensibil pentru debit);
FT-Flow traductor(traductor de debit);
9
PA-Pneumatic actuator(actuator pneumatic);
EPP-Electro pneumatic positioned;
FC-Float controller(regulator de debit);
TC-Temperature controller ;
TT- Temperature traductor(adaptor de temperatura);
TE-Element sensibil de temperatura ;
2.4. Schema bloc atasata procesului.
10
CAP III Modelarea matematica a proceselor
3.1 Identificarea sistemelor generalitati
Identificarea inseamna determinarea modelului unui sistem fizic pe baza unor date masurate. Cum modelarea naturii sta la baza intelegerii lumii, metodele de identificare au aplicatii in aproape toate domeniile stiintei si in special in cele tehnice.
Modelul unui sistem dinamic este, la randul sau, un sistem:
• fizic (modelare materiala);
• matematic (modelare abstracta, formala, analitica);
• mental (ex.: modelul de conducere al unui autovehicul concretizat, cu precadere, intr-o memorie a muschilor);
• grafic (sau tabel);
• software (ansamblul de programe interconectate si tabele de cautare, adesea imposibil de sintetizat intr-o forma analitica).
Modul de construire a modelului unui proces depinde de natura acestuia:
• pentru modelele mentale un rol esential il au cunostintele euristice si experienta;
• modelele grafice sunt construite pe baza anumitor masuratori;
• modelele matematice sunt dezvoltate pe 2 cai (sau o combinatie a acestora):
a) descompunerea (in maniera figurativa) a sistemului in subsisteme cu proprietati cunoscute; ulterior subsistemele sunt juxtapuse analitic pentru a reconstitui modelul sistemului studiat. Aceasta metoda poarta numele (printr-un abuz de limbaj) de "modelare" si nu implica nici un fel de experimentari asupra sistemului.Ulterior recompunerea modelului din elementele primare se face, cu precadere,prin tehnici software, in defavoarea metodelor analitice pure.
b) metoda experimentala (proprie modelelor analitice si grafice) ce consta in inregistrarea semnalelor de intrare si iesire din proces si deducerea modelului pe baza legaturii dintre acestea. Aceasta din urma metoda este proprie disciplinei de identificare a sistemelor.
3.2. Modelul matematic al schimbatorului de caldura
a) Regim stationar Ecuatia de echilibru:
(3.1)
Wi – cantitatea de caldura ce intra in proces;
11
We – cantitatea de caldura ce iese din proces;
Obs: indicele “n” reprezinta regimul nominal de functionare.
Ecuatia debitelor:
(3.2)
(3.3)
a, p, e : densitatile apei la temperaturile a, p, e.
Ca, Cp, Ce :caldurile specifice ale apei la temperaturile a, p, e.
b) Regimul dinamic
Variatia de caldura inmagazinata:
(3.4)
(3.5)
(3.6)
Datorita termenului al treilea din relatia (3.5) aceasta ecuatie diferentiala este neliniara. Pentru a obtine functia de transfer a schimbatorului de caldura se liniarizeaza relatia in jurul unui punct nominal de functionare cu ajutorul metodei “micilor variatii”.
(3.7)
(3.8)
(3.9)
(3.10)
Din relatia (3.5) si folosind relatiile (3.7), (3.8), (3.9) rezulta:
12
Din relatia (3.10) si aproximand
(3.11)
- impart relatia (3.11) prin
Notez: si
(3.12)
Impart prin
Fac notatia:
(3.13)
Prin aplicarea tranformatei Laplace relatiei (3.13)
=
y(t) – marimea de iesire;
u(t) – marimea de intrare;
TSC =1872 s- constanta de timp a schimbatorului de caldura;
GSC(s) – functia de transfer a schimbatorului de caldura;
KSC=0.433;
13
3.3.Modelul matematic al conductei cu agent termic
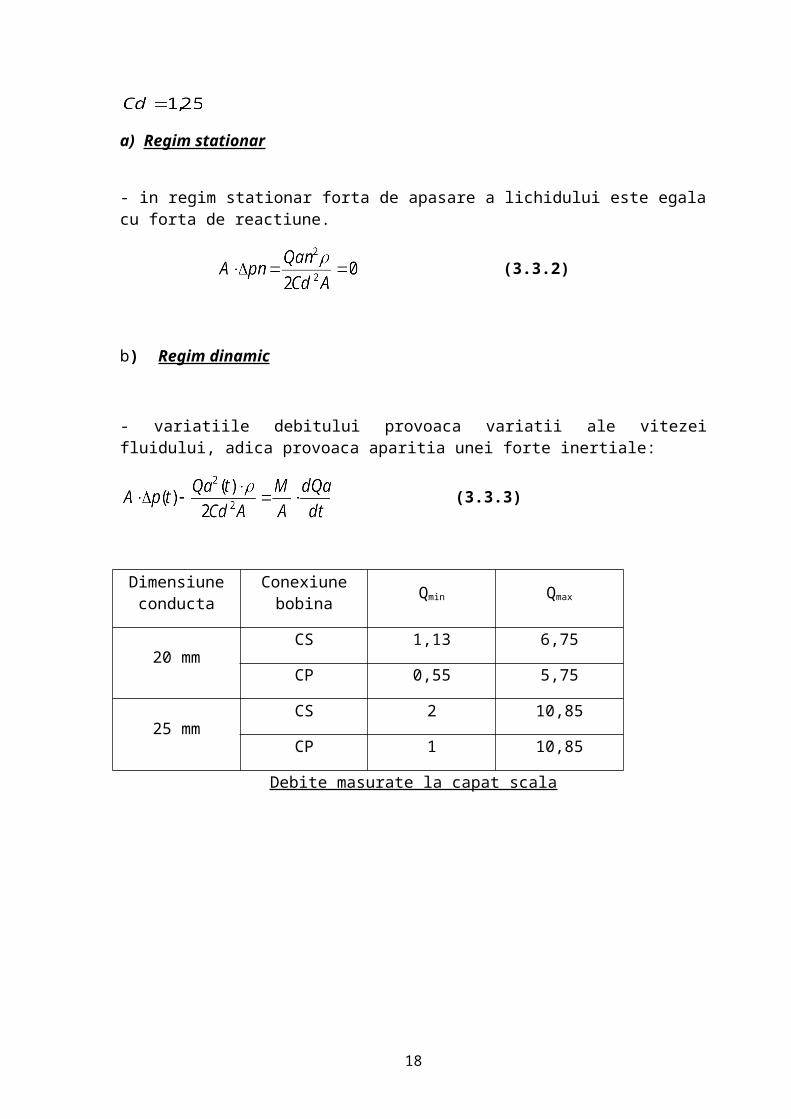
Debitul care circula printr-o conducta poate fi calculat astfel:
(3.3.1)
a) Regim stationar
- in regim stationar forta de apasare a lichidului este egala cu forta de reactiune.
(3.3.2)
b) Regim dinamic
- variatiile debitului provoaca variatii ale vitezei fluidului, adica provoaca aparitia unei forte inertiale:
(3.3.3)
Dimensiune conducta
Conexiune bobina
Qmin Qmax
20 mmCS 1,13 6,75
CP 0,55 5,75
25 mmCS 2 10,85
CP 1 10,85
Debite masurate la capat scala
14
; M – masa fluidului din conducta
Vcd – volumul cilindrului
; d – diametrul conductei de agent termic.
d=20 mm; conexiune serie.
Cd =1,5
Notez:
(3.3.4)
(3.3.5)
Inmultesc cu:
Notez: ; ;
15
Tcd = 2260,8s;
Kcd =0.5;
Capitolil IV: Traductoare
4.1. Generalitați
Cu ajutorul traductoarelor alegem informația de lucru din proces. Pentru ca informația sa fie corecta trebuie sa se asigure o relație univoca, sa fie reproductibila si sa aiba inerția cȃt mai redusa. La ora actuala exista o mulțime de traductoare.
Traductorul este amplasat pe legatura de reacție a sistemului automat, un eventual traductor de intrare permite realizarea elementului de comparație. De locul de amplasare a traductorului depinde precizia si costul. Trebuie gasite metode pentru amplasarea traductoarelor. Exista sisteme de manuare a poziției sau deplasarii. Manuarea poate fi directa sau indirecta.
Traductoarele implica necesitatea unei fiabilitați sporite in raport cu aparatul de masura dat.
Din punct de vedere al caracteristicii statice si dinamice prin cerințele impuse, traductoarele sunt cu relație liniara de dependența intre intrare si iesire iar dinamica proprie sa nu influențeze in mod esențial comportarea sistemului automat.
Traductoarele trebuie sa imbine performanțele de liniaritate si viteza de raspuns ridicata cu performanțe metrologice privind precizia, similare cu cele ale gradului de masurare sau chiar mai ridicate, ținand cont de posibilitațile super ale sistemelor de conducere automata fața de cele ale unui generator.
Traductoarele sunt adesea alcatuite din doua parti: elementul sensibil si elementul de adaptare.Traductoarele sunt de doua feluri:
specializate unificate.
4.2. Detectorul electromagnetic de debit
16
Detectorul electromagnetic este alcatuit dintr-o conducta de material magnetic aflata in cȃmpul magnetic al unui magnet permanent. Ȋn conducta se introduc doi electrozi pe direcția perpendiculara direcției de curgere a fluidului ȋn cȃmpul magnetic. Traductoarul de debit este construit dintr-un bloc primar (denumit uzual detectorul electromagnetic de debit) inseriat conductei, prin el trecȃnd fluidul de masurat si blocul secundar care este montat la distanța fața de traductorul primar, cele doua elemente fiind conectate electric intre ele.
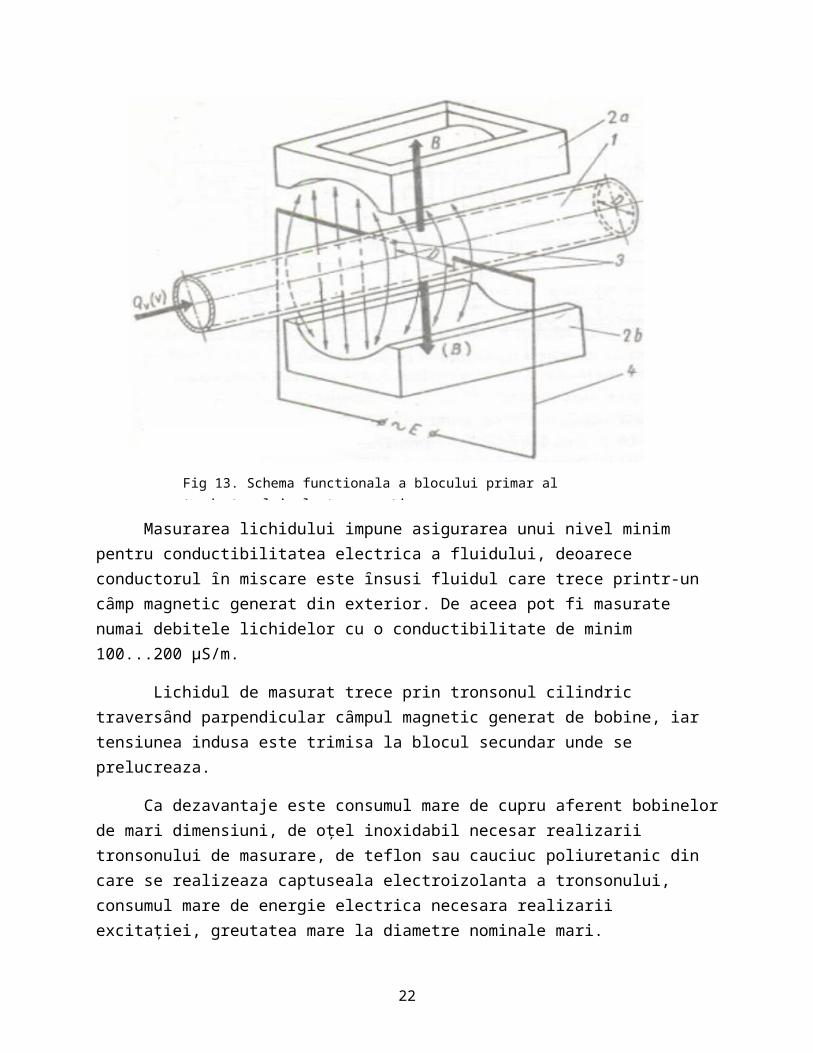
Masurarea lichidului impune asigurarea unui nivel minim pentru conductibilitatea electrica a fluidului, deoarece conductorul ȋn miscare este ȋnsusi fluidul care trece printr-un cȃmp magnetic generat din exterior. De aceea pot fi masurate numai debitele lichidelor cu o conductibilitate de minim 100...200 μS/m.
Lichidul de masurat trece prin tronsonul cilindric traversȃnd parpendicular cȃmpul magnetic generat de bobine, iar tensiunea indusa este trimisa la blocul secundar unde se prelucreaza.
Ca dezavantaje este consumul mare de cupru aferent bobinelor de mari dimensiuni, de oțel inoxidabil necesar realizarii tronsonului de masurare, de teflon sau cauciuc poliuretanic din care se realizeaza captuseala electroizolanta a tronsonului, consumul mare de energie electrica necesara realizarii excitației, greutatea mare la diametre nominale mari.
Fig 13. Schema functionala a blocului primar al traductorului electromagnetic
17
Montarea detectorului de debit se poate face in orice poziție pe conducte in permanența pline cu lichid, asigurandu-se sensul de curgere conform sageții imprimate pe corpul sau.
4.3. Modelarea matematica a detectorului electromagnetic
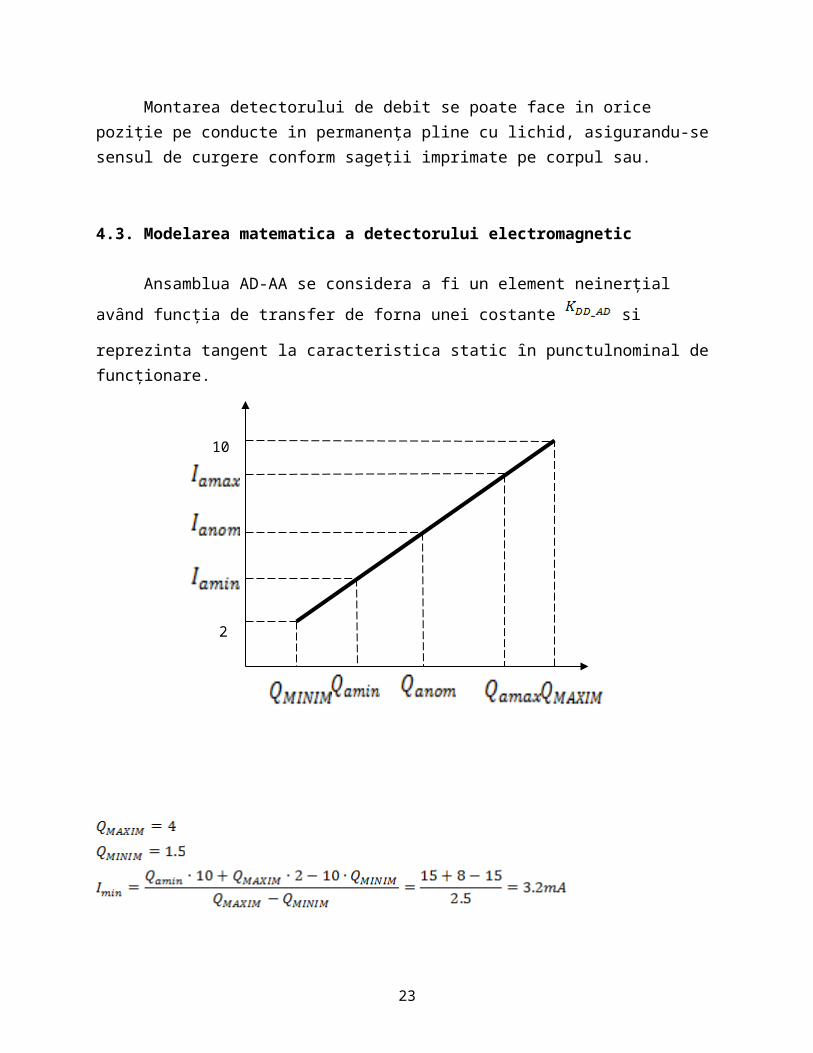
Ansamblua AD-AA se considera a fi un element neinerțial avȃnd funcția de transfer de
forna unei costante si reprezinta tangent la caracteristica static ȋn punctulnominal de
funcționare.
2
10
18

4.4. Traductorul de temperatura. Termorezistența
Masurarea temperaturii se bazeaza pe diferite fenomene si efecte fizice, in care modificarea temperaturii determina modificari ale unor proprietati sau caracteristici ale materialelor: variatia dimensiunilor geometrice, variatia rezistentei electrice, aparitia unei tensiuni electromotoare de-a lungul jonctiunii a doua metale, variatia intensitatii radiatei emise, variatia frecventei de rezonanta a unui cristal de cuart etc. Acuratetea procesului de masurare a temperaturii este foarte importanta pentru cele mai multe aplicatii de control a diferitelor procese tehnologice.
Termorezistentele sunt traductoare de temperatura care transforma variatia de temperatura a mediului controlat in variatia rezistentei elementului sensibil si se bazeaza pe proprietatea materialelor de a-si modifica rezistenta electrica in functie de temperatura dupa urmatoarea formula:
Rt = R0 (1 + At + Bt2)
4.5. Alegerea senzorului de temperatura. Modelarea ansamblului sensor-adaptor de temperatura
Traductoarele de temperatura sunt elemente inertiale de ordinul 1, cu functia de transfer:
Pentru masurarea temperaturii produsului util incazit se alege din catalog o termorezistenta TTR 1.2.07.1.5.4.9.1.0
1 – constructie normala;
2 – termorezistenta Pt50
07 – caracteristicile tubului de protectie (teaca protectoare);
De – diametrul exterior; De = 12mm;
Le – lungimea efectiva a termorezistentei; Le = 250mm;
4.1
19
1 – materialul din care este realizata teaca protectoare (Cu);
5 – domeniul de temperatura (max 2500C);
4 – dispozitivul de fixare;
9 – lungimea de imersie; Li = 100mm;
1 – tipul executiei;
0- protectie climatica.
A. Calculul constantei de timp
Ttt = CR
unde :
C – este capacitatea termica [J/0C];
R – rezistenta termica [0C/W].
C = mcp = 11,58 J/0C, unde :
m – este masa tecii protectoare [Kg]; m = ρCuV = 0,03Kg;V = πLiδ(De-δ);
cp – caldura specifica a materialului (Cu) [ J/Kg*0C]; cp = 386 J/Kg0C
δ – grosimea tecii protectoare; δ = 1 1,5mm.
Se presupune ca transferul de caldura de la fluid la teaca protectoare are loc prin convectie fortata:
= 1,44 0C/W, unde:
α – este coeficientul de convectie [W/m2*0C]; α = 6916,1W/m20C;
S – suprafata sectuinii transversale a tecii protectoare; = 0,0001m2.
Coeficientul de convectie α se calculeaza plecând de la o relatie dedusa experimental. Pentru lichide in curgere normala pentru un cilindru e valabila urmatoarea relatie:
= 124,49, unde:
Nu – este numarul lui Nusselt; ;
4.1
20
Re – numarul lui Reynolds; ;
Pr – numarul lui Pradle; .
Observatie: coeficientii se iau din catalog pentru .
Nu caracterizeaza intensitatea procesului de transfer de caldura la limita fluid-perete.
- coeficient de conductivitate al apei [W/m*0C]
Re caracterizeaza regimul de curgere a unui fluid.
v – viteza de curgere a fluidului din schimbatorul de caldura.
= 1,5m/s, unde:
D’cd – este diametrul conductei de golire; D’
cd = 2*Dcd = 2*0,02m = 0,04m.
ν – vâscozitatea cinematica a fluidului [m2/s]
Pr caracterizeaza proprietatile fizice ale fluidului.
η – vâscozitatea dinamica a fluidului [Ns/m2]
cpa – caldura specifica a fluidului [J/Kg*0C]
Ttt = CR = 16,67 J/W
B. Calculul factorului de proportionalitate
Se calculeaza factorul de proportionalitate pentru intreg ansamblul traductor de temperatura-adaptor pentru traductorul de temperatura.
Se adopta din catalog un adaptor pentru termorezistenta de tip ELT 162 cu domeniul de masurare 0 1000C.
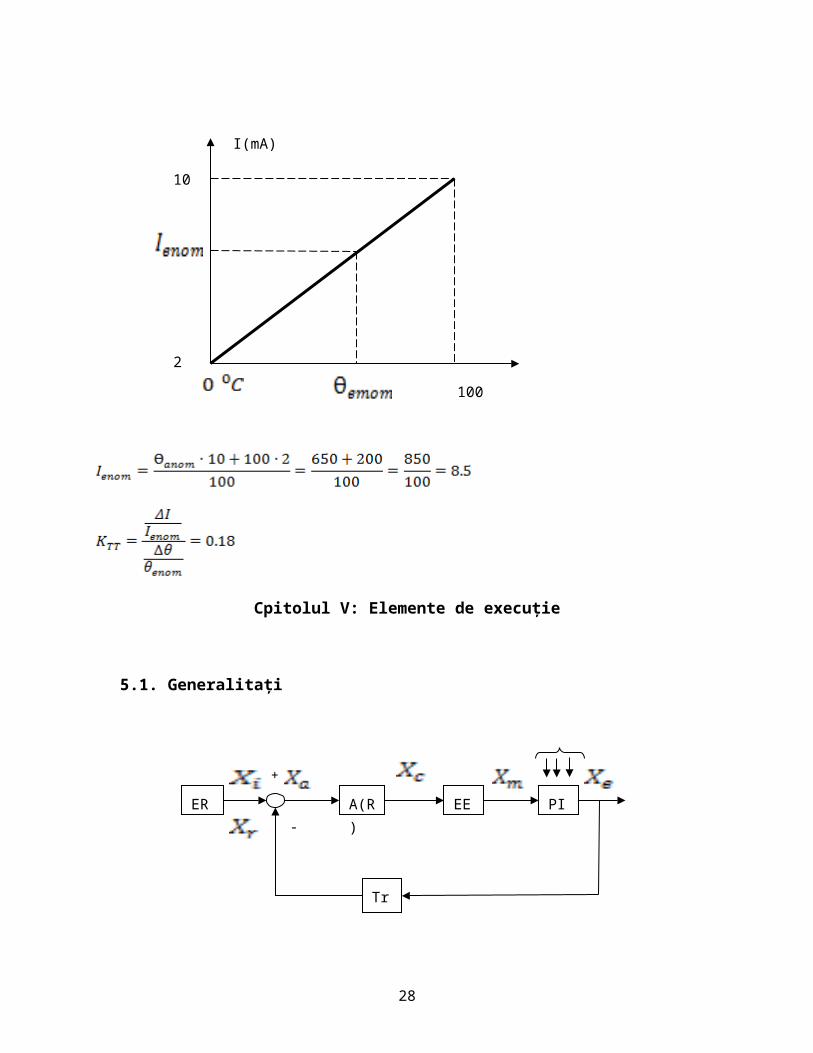
Caracteristica statica este:
4.2
21
Cpitolul V: Elemente de execuție
5.1. Generalitați
I(mA)
10
2
100
ER A(R) EE PI
Tr
+
-
22
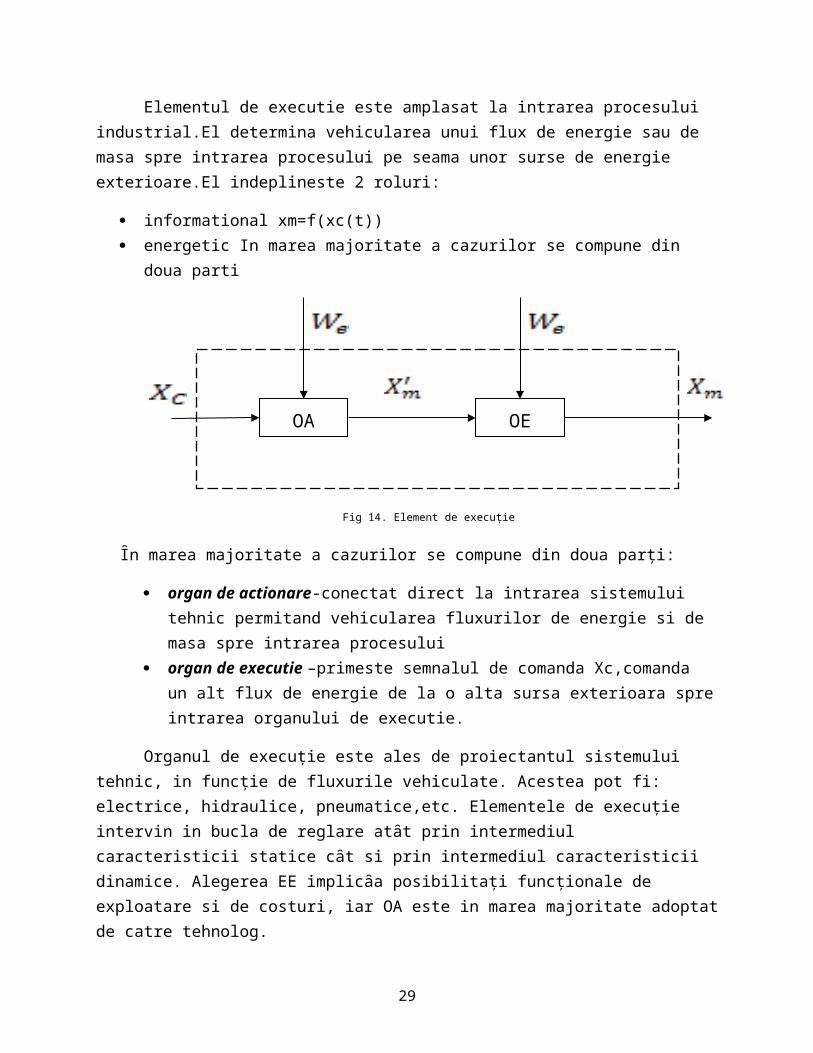
Elementul de executie este amplasat la intrarea procesului industrial.El determina vehicularea unui flux de energie sau de masa spre intrarea procesului pe seama unor surse de energie exterioare.El indeplineste 2 roluri:
informational xm=f(xc(t)) energetic In marea majoritate a cazurilor se compune din doua parti
Ȋn marea majoritate a cazurilor se compune din doua parți:
organ de actionare-conectat direct la intrarea sistemului tehnic permitand vehicularea fluxurilor de energie si de masa spre intrarea procesului
organ de executie –primeste semnalul de comanda Xc,comanda un alt flux de energie de la o alta sursa exterioara spre intrarea organului de executie.
Organul de execuție este ales de proiectantul sistemului tehnic, in funcție de fluxurile vehiculate. Acestea pot fi: electrice, hidraulice, pneumatice,etc. Elementele de execuție intervin in bucla de reglare atȃt prin intermediul caracteristicii statice cȃt si prin intermediul caracteristicii dinamice. Alegerea EE implicȃa posibilitați funcționale de exploatare si de costuri, iar OA este in marea majoritate adoptat de catre tehnolog.
Cele mai raspȃndite OA sunt cele electrice, datorita performanțelor staționare si dinamice ridicate si datorita posibilitaților de comanda a acestora de la orice distanta.
OA pneumatice sunt utilizate la puteri mici si pot fi utilizate ȋn medii periculoase, sunt ieftine, raza de acțiune fiind scurta(3-500m).
OA hidraulice sunt folosite in aceleasi condiții, ele se folosesc in cazul generarii de fluxuri de putere mare la gabarite reduse.
EE pot fi:
cu actiune continua
OA OE
Fig 14. Element de execuție
23
cu actiune discontinua(cvasicontinue): bipozitionale tripozitionale pozitionale
numerice.
5.2. Servomotorul pneumatic. Organ de acționare
Servomotor pneumatic al unui sistem de comanda automata sau de reglare automata folosit pentru actionarea unui element de executie al unui sistem tehnic, transformând un semnal aplicat la intrare intr-o miscare de cele mai multe ori de rotatie si folosind o sursa auxiliara de energie.
Un actuator pneumatic cu piston consta dintr-un cilindru in care un piston si o tija sunt mutate de catre actiunea de aer comprimat sau cu un arc. Actiune poate fi simplu sau dublu. Intr-un actuator pneumatic singur actiune accident vascular cerebral de lucru este asigurata de actiunea de aer comprimat, si accident vascular cerebral retur de un izvor, intr-o actionare cu dubla actiune piston este mutat in ambele directii cu aer comprimat. In cazul in care fortele substantiale trebuie sa fie produse folosind butelii de diametru mic, mai multe elemente de actionare (duble, triple, si asa mai departe) sunt utilizate.
5.3. Alegerea robinetuli de reglare
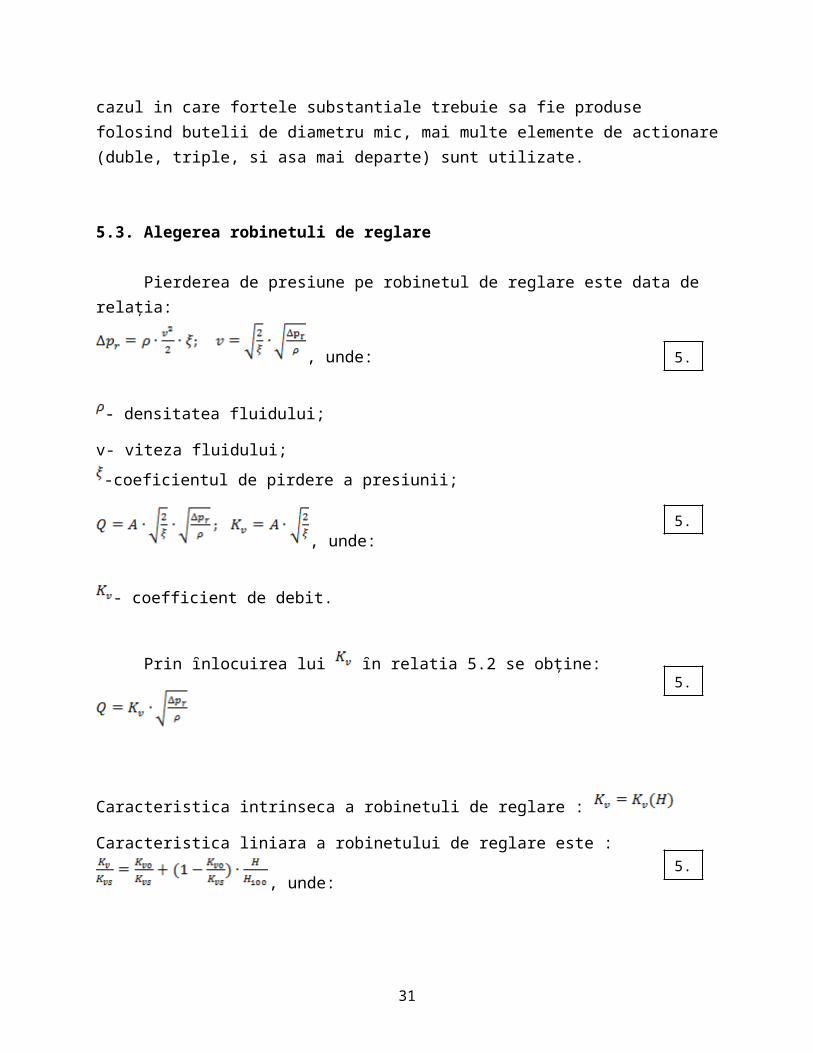
Pierderea de presiune pe robinetul de reglare este data de relația:
, unde:
- densitatea fluidului;
v- viteza fluidului;
-coeficientul de pirdere a presiunii;
, unde:
- coefficient de debit.
5.1
5.2
24
Prin ȋnlocuirea lui ȋn relatia 5.2 se obține:
Caracteristica intrinseca a robinetuli de reglare :
Caracteristica liniara a robinetului de reglare este :
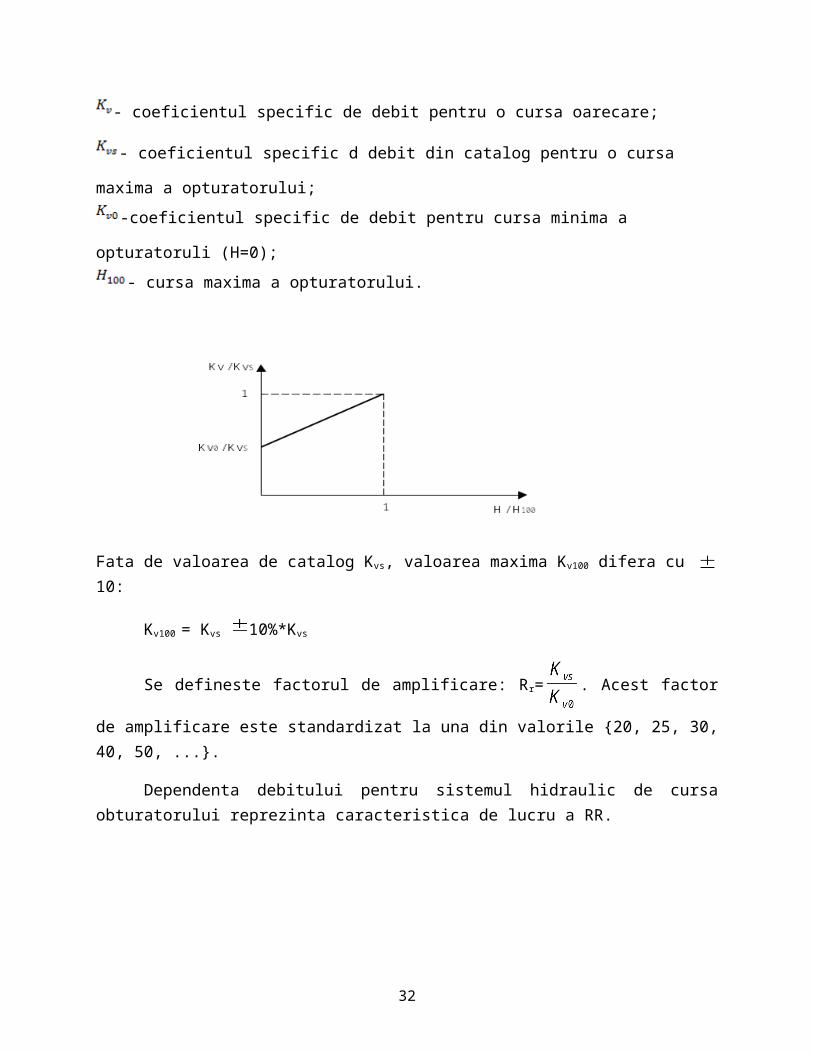
, unde:
- coeficientul specific de debit pentru o cursa oarecare;
- coeficientul specific d debit din catalog pentru o cursa maxima a opturatorului;
-coeficientul specific de debit pentru cursa minima a opturatoruli (H=0);
- cursa maxima a opturatorului.
Fata de valoarea de catalog Kvs, valoarea maxima Kv100 difera cu 10:
Kv100 = Kvs 10%*Kvs
Se defineste factorul de amplificare: Rr= . Acest factor de amplificare este
standardizat la una din valorile {20, 25, 30, 40, 50, ...}.
Dependenta debitului pentru sistemul hidraulic de cursa obturatorului reprezinta caracteristica de lucru a RR.
5.3
5.4
25
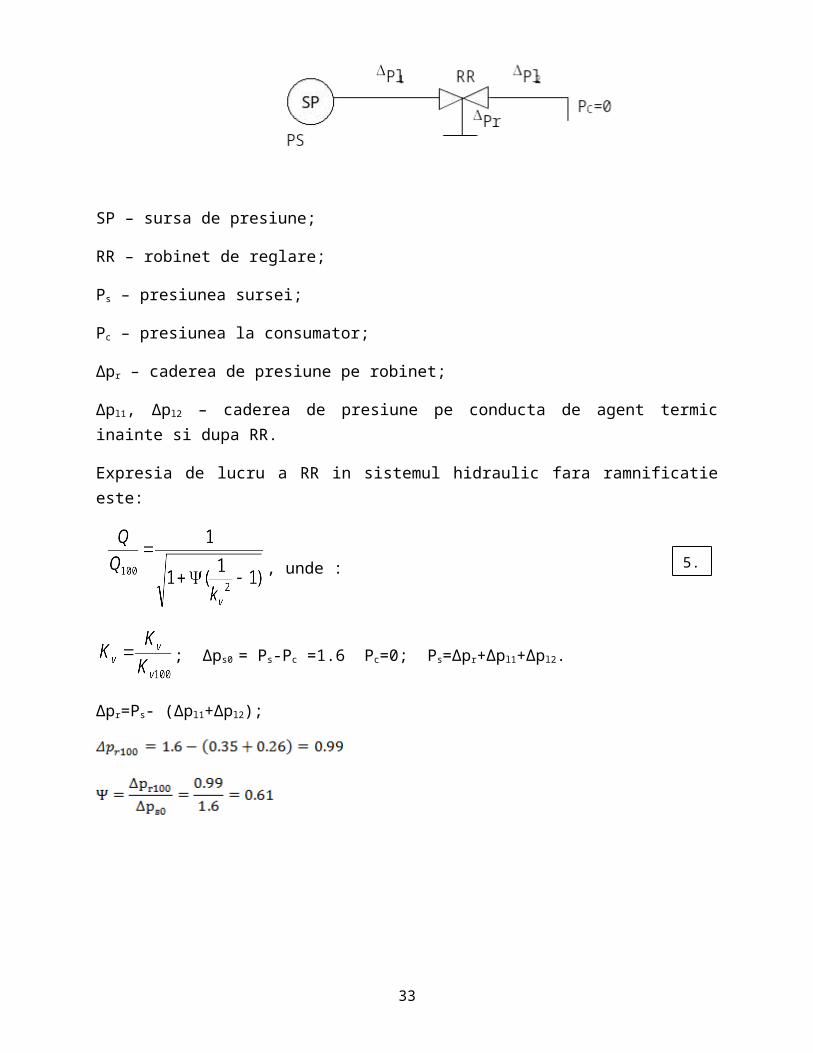
SP – sursa de presiune;
RR – robinet de reglare;
Ps – presiunea sursei;
Pc – presiunea la consumator;
Δpr – caderea de presiune pe robinet;
Δpl1, Δpl2 – caderea de presiune pe conducta de agent termic inainte si dupa RR.
Expresia de lucru a RR in sistemul hidraulic fara ramnificatie este:
, unde :
; Δps0 = Ps-Pc =1.6 Pc=0; Ps=Δpr+Δpl1+Δpl2.
Δpr=Ps- (Δpl1+Δpl2);
5.5
26
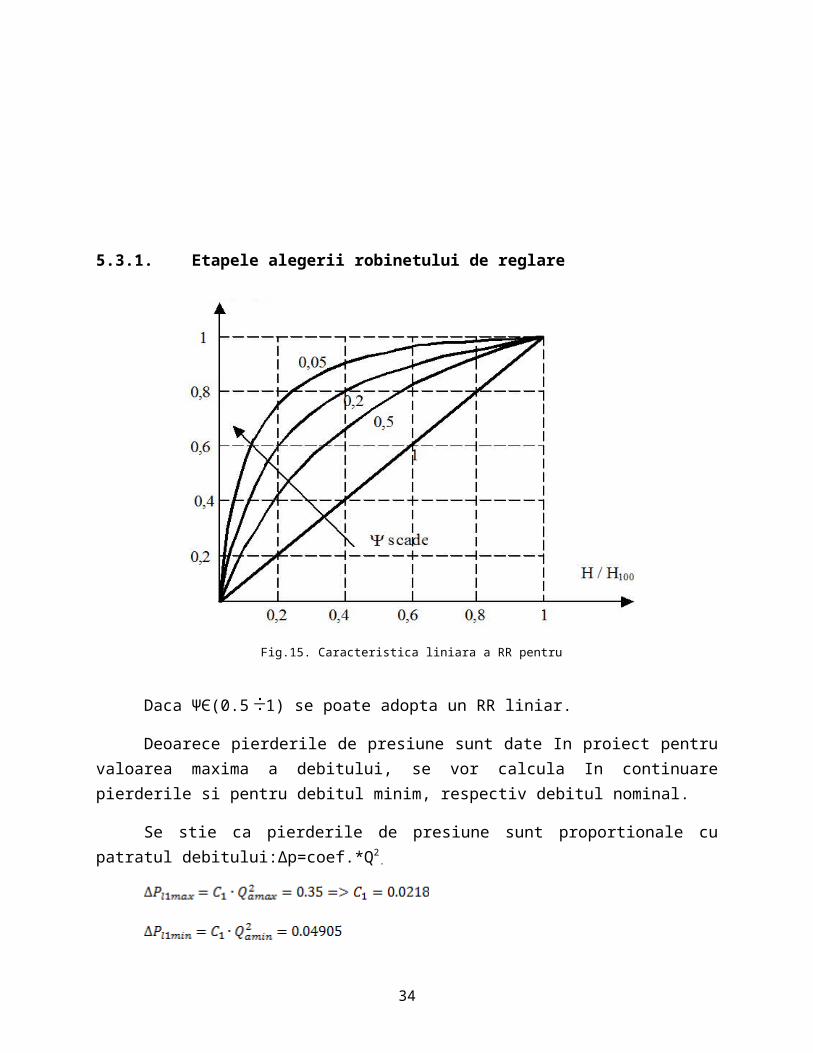
5.3.1. Etapele alegerii robinetului de reglare
Daca ΨЄ(0.5 1) se poate adopta un RR liniar.
Deoarece pierderile de presiune sunt date In proiect pentru valoarea maxima a debitului, se vor calcula In continuare pierderile si pentru debitul minim, respectiv debitul nominal.
Se stie ca pierderile de presiune sunt proportionale cu patratul debitului:Δp=coef.*Q2.
Fig.15. Caracteristica liniara a RR pentru diverse valori ale lui
27
A. Calculul caderii de presiune pe RR pentru cele 3 debite:
Se calculeaza Ψ = =0.61. Daca din calcul Ψ este subunitar (Ψ>0,5) se va adopta
un RR cu o caracteristica intrinseca liniara. Astfel rezulta Kvmax, Kvmin, Kvnom:
Observatie: , .
Se adopta un RR cu Kvscalc Є [A, B], A = 1,1*Kvmax, B= 1,4*Kvmax. In functie de calculul de
mai sus, valoarea finala a lui Kvs Є{2.1; 3; 4; 5; 9; 13} astfel Incât Kvs Kvscalc.
28
A. Calculul factorului de proportionalitate a RR
Factorul de proportionalitate este egal cu panta tangentei In punctul nominal de functionare din caracteristica de lucru a sistemului hidraulic.
=0.72
Coeficientii Hmax, Hmin, Hnom reprezinta valorile cursei obturatorului robinetului pentru a se obtine Qamax, Qamin, Qanom si se determina din expresia caracteristicii intrinseci.
Hmax =11.2; Hmin =3.2; Hnom =5.6
Se adopta un RR cu un coeficient de amplificare Rr = 25.
5.3.2 Alegerea servomotorului pneumatic
Se adopta din catalog servomotorul pneumatic P135/20 care poate actiona robinetul de reglare si care are urmatoarele caracteristici:
H100 = 20mm; Dm = 135mm;
P1 = 0,2bar; F1 = 280 N
P2 = 1,5bar; F2 = 710 N
Greutatea partilor mobile este Gm = 20 40 N.
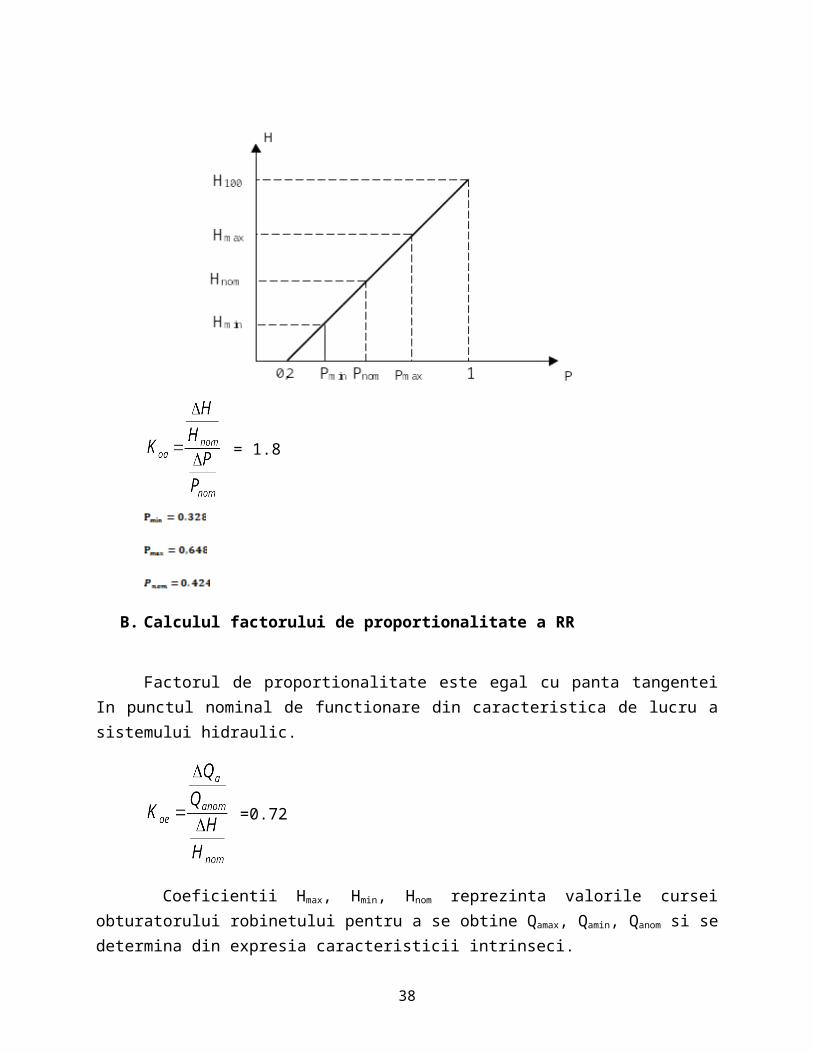
Factorul de proportionalitate reprezinta panta tangentei In punctul nominal de functionare din caracteristica statica:
29
= 1.8
B. Calculul factorului de proportionalitate a RR
Factorul de proportionalitate este egal cu panta tangentei In punctul nominal de functionare din caracteristica de lucru a sistemului hidraulic.
=0.72
Coeficientii Hmax, Hmin, Hnom reprezinta valorile cursei obturatorului robinetului pentru a se obtine Qamax, Qamin, Qanom si se determina din expresia caracteristicii intrinseci.
Hmax =11.2; Hmin =3.2; Hnom =5.6
Se adopta un RR cu un coeficient de amplificare Rr = 25.
30
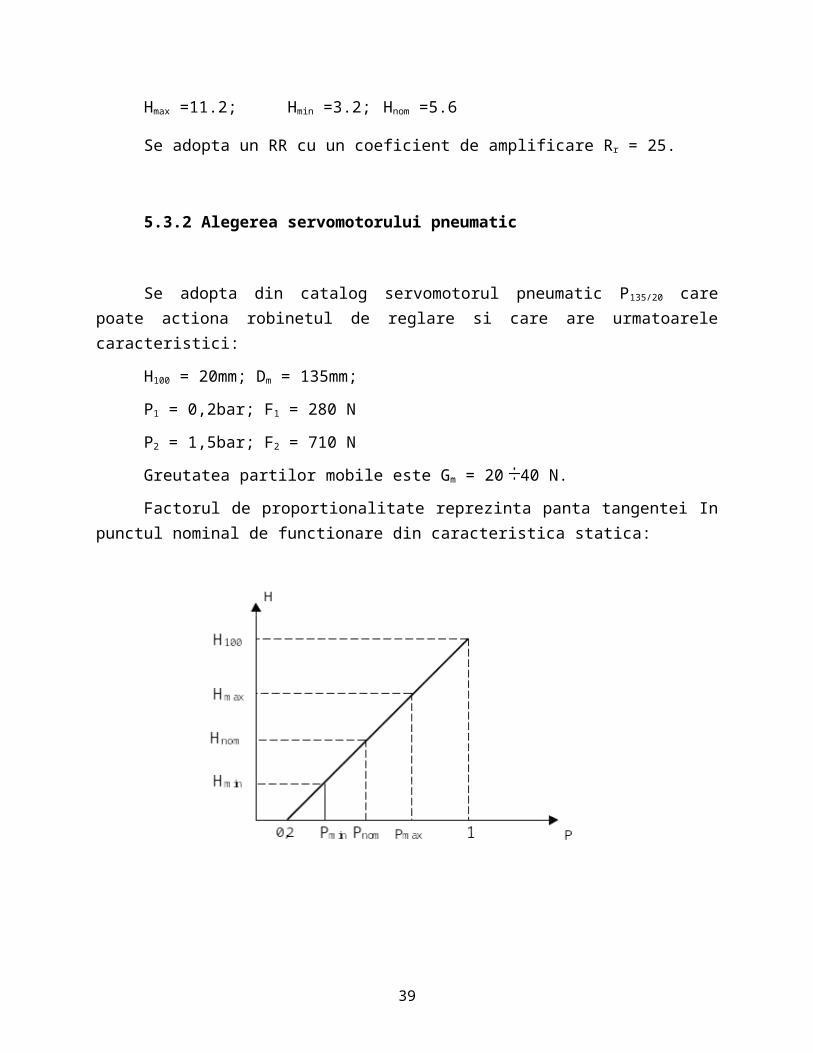
5.3.2 Alegerea servomotorului pneumatic
Se adopta din catalog servomotorul pneumatic P135/20 care poate actiona robinetul de reglare si care are urmatoarele caracteristici:
H100 = 20mm; Dm = 135mm;
P1 = 0,2bar; F1 = 280 N
P2 = 1,5bar; F2 = 710 N
Greutatea partilor mobile este Gm = 20 40 N.
Factorul de proportionalitate reprezinta panta tangentei In punctul nominal de functionare din caracteristica statica:
= 1.8
5.3.3 Calculul constantei de timp a servomotorului
31
=,
unde:
η – vâscozitatea dinamica a aerului instrumental; η = 18,1*10-6 Ns/m3;
P – presiunea maxima a aerului instrumental; P = 105 N/m2;
Δp – variatia maxima a presiunii aerului instrumental; Δp = 0,3*105 N/m2;
f – aria echivalenta a membranei; f = ;
dm – diametrul discului de rigidizare; dm = 0,8*Dm =0.108m;
Ke – constanta de elasticitate a servomotorului; Ke = F1bar/H100 =26417,5.
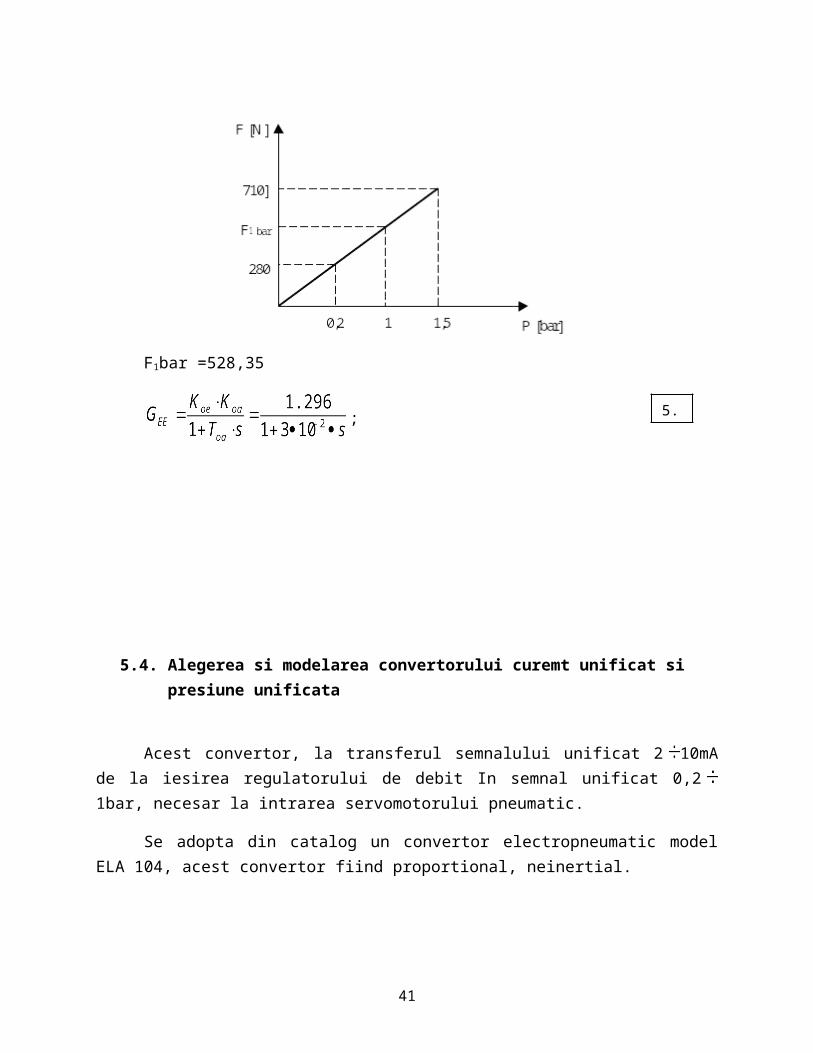
F1bar =528,35
;
5.4. Alegerea si modelarea convertorului curemt unificat si presiune unificata
5.6
32
Acest convertor, la transferul semnalului unificat 2 10mA de la iesirea regulatorului de debit In semnal unificat 0,2 1bar, necesar la intrarea servomotorului pneumatic.
Se adopta din catalog un convertor electropneumatic model ELA 104, acest convertor fiind proportional, neinertial.
Caracteristica statica a convertorului electropneumatic este:
; Pnom = 0,1*Inom
Cpitolul VII: Adoptarea si reglarea regulatorului
5.7
33
7.1. Varianta Kessler a criteriului modulului
Fie un sistem liniar monovariabil supus unei perturbatii aditive. In cazul unei comportari ideale marimea de iesire trebuie sa urmareasca fidel si fara Intârziere marimea de intrare.
r(t) = y(t)
Y(s) = Yr(s) + Yp(s) = G0(s)*R(s) + Gop(s)*P(s)
Pentru comportarea ideala a sistemului, pentru orice tip de perturbatie trebuie sa fie Indeplinite conditiile: G0(s) = 1, Gop(s) = 0.
Prin traspunerea acestor relatii In domeniul frecventei rezulta:
Aceste conditii impuse modulurilor stau la baza criteriului modulului prin care se alege si se acordeaza regulatorul.
Varianta Kessler stabileste relatii de acordare optima care asigura simultan o comportare buna In raport cu semnalele de referinta, cât si In raport cu perturbarile, fara a trata separat asigurarea anumitor performante.
Proiectarea unui sistem de reglare automat se face usor atunci când ordinul sistemului este unic.
In general elementul de executie, procesul si traductorul formeaza o parte fixata a sistemului, având functia de transfer:
GPF(s) = GEE*GPROc(s)*GTRAD(s)
Fig.16. Schema bloc a structurii de reglare.
34

Modelul matematic al partii fixate a sistemului automat:
Partea fixata se Inlocuieste cu un sistem de ordin redus de urmatoarea forma:
, unde:
KPF – este factorul de amplificare al partii fixate;
- suma constantelor de timp mici (parazite) ale sistemului;
Tk – suma constantelor de timp mari (predominante ale sistemului.
<<min{Tk}; k = 1...n
Orice sistem de urmarire dupa principiul abaterii poate fi redus la urmatoarea forma:
Din conditiile criteriului modulului se recomanda un regulator a carui functie de transfer are urmatoarea forma generala:
, cu aproximatie, Intrucât gradul numaratorului nu
poate depasi gradul numitorului din considerentul realizabilitatii fizice.
In cazul variantei Kessler a criteriului modulului, pentru obtinerea unor performante
optime se impun urmatoarele conditii suplimentare: m=n; ; .
7.2. Regulatorul buclei interne
7.1
7.2
35

In cazul sistemului din bucla interna avem urmatoarea functie de transfer:
, unde:
KPF-i=
; T1 = TCD=
Ca regulator al buclei interne se adopta un regulator cu lege de reglare de tip PI cu parametri dependenti.
Comparând relatiile 7.5 si 7.6 rezulta: Ti = TCD;
Din catalog se adopta un regulator de tip PI, model ELC 111 cu referinta externa, unde BP[%]=100/Kp.
Gd-i(s) = GPF-i(s)GREG-i(s)
7.3
7.4
7.5
7.6
7.7
7.8
36
Comportarea buclei interne la perturbatie
7.3. Reglarea buclei externe
7.9
37
, unde:
KPF-e = KSC
T’1 =TSC;
Se adopta pentru bucla exterioara un redulator PID cu interinfluientâ.
Functia de transfer a sistemului In circuit Inchis este:
Functia de transfer a sistemului In circuit Inchis este de forma unei functii de transfer de ordinul 2 la care este introdus un zero suplimentar.
. Se impune ξ=0,707.
λ = ωn/z = ωn/Ti; λ [0.8; 0.85]
tr = 3.426/ ωn ξ, rezulta ωn-c = . Se adopta ωn-a>= ωn-c,
ωn-a=0.005
Ti-c = λ/ ωn-c = 160s; Ti-a<=Ti-c
7.10
7.11
7.12
38
Se alege un regulator de tip PID model ELC 113 care are ca valori pentru Ti:
Secunde: 10 12 15 20 25 30 40 50
Minute: 1 1.2 1.5 2 2.5 3 4 5 6 8 10 12 15 20 25 30Deci Ti-a =3min
; BP[%] = 100/17,25 = 5,79; BP-a<=BP-c
BP: 0.5 2 2.5 3 4 5 6 7.5 10 12.5 15 17.5 20 25 30 40 50 60 75 100 125 150 175 200
Deci BP-a =5
Dupa aceea rezulta Kr-a = 20
Se adopta pentru Td prima valoare mai mare a lui Td-c:
Secunde: 0 5 7 9 11 14 17 20 25 30 40 50
Minute: 1 1.2 1.5 2 2.5 3 3.5 4 5 6 8 10
Td-a=17
7.13
39

Bibliografie:
40
I. Olah, L. Mastacan, C. Lazar, E.S.C.A. – Indrumar de laborator, Iasi, 1997 M. Tertisco, D. Popescu, B. Joca, I. Russ – Automatizari industriale continue, Ed. Didactica si Pedagogica, Bucuresti, 1992; I. Dumitrache, Tehnica reglarii automate, Ed. Didactica si Pedagogica, Bucuresti, 1980; Corneliu Lazar, Ingineria reglarii automate, Vol. I, 1998;
41





























