Embed Size (px)
DESCRIPTION
Resis I
Citation preview

ESTADO TRIAXIAL
ESFUERZOS PRINCIPALES CORRESPONDIENTES A UN ESTADO GENERAL DE ESFUERZOS
La mayoría de los elementos de máquinas y de estructuras soportan cargas que
generan estados de esfuerzos más complejos que el estado uniaxial. En este
capítulo, deduciremos relaciones para obtener el estado de esfuerzos en un sistema
de ejes tridimensional cualquiera, a partir de la información inicial para el sistema
coordenado x-y-z.
Considérese un cuerpo sujeto a la acción de un sistema de cargas genérico.
Figura 5.13
Sea Q un punto representativo del estado general de esfuerzos, para el cuál se
conocen las componentes del tensor de esfuerzos.
Figura 5.14
289

El tensor de esfuerzos en el sistema x-y-z
(5.28)
Considérese el plano inclinado definido por su normal n y que pasa por Q. El
esfuerzo resultante en este plano será S, y sus componentes normal y tangencial,
son respectivamente, .
Por lo tanto, se verifica que:
SX, SY , y SZ son las componentes del esfuerzo resultante sobre los ejes x, y, z respectivamente
Para obtener las proyecciones de la fuerza resultante según los ejes x, y, z;
determinaremos previamente las áreas de las caras del elemento.
dA es el área de la cara oblicua:
dAX = dA cos X = área de la cara X
dAY = dA cos Y = área de la cara Y
dAZ = dA cos Z = área de la cara Z
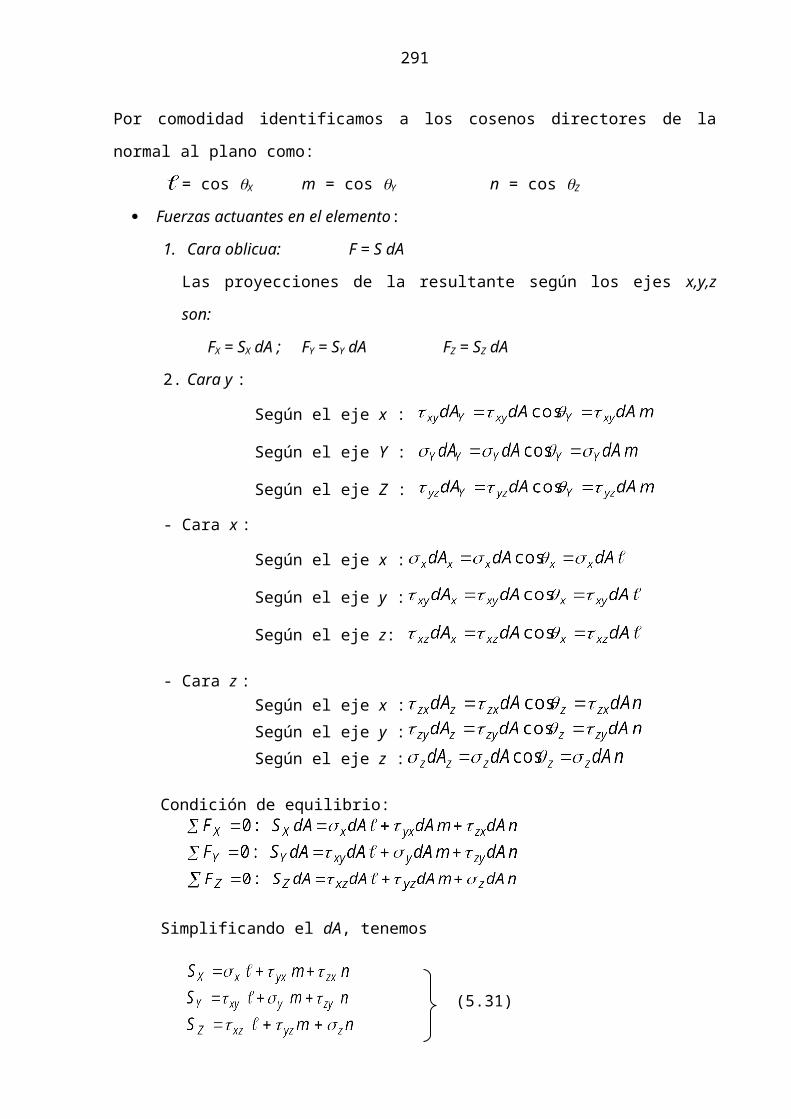
Por comodidad identificamos a los cosenos directores de la normal al plano como:
= cos X m = cos Y n = cos Z
Fuerzas actuantes en el elemento:
1. Cara oblicua: F = S dA
Las proyecciones de la resultante según los ejes x,y,z son:
FX = SX dA ; FY = SY dA FZ = SZ dA
2. Cara y :
Según el eje x :
Según el eje Y :
Según el eje Z :
- Cara x :
Según el eje x :
Según el eje y :
Según el eje z:
- Cara z :Según el eje x :Según el eje y :
290
Según el eje z :
Condición de equilibrio:
Simplificando el dA, tenemos
(5.31)
Vemos que es posible expresar las componentes SX, SY, y SZ del esfuerzo
resultante en función de las seis componentes del tensor de esfuerzos.
Para hallar el esfuerzo normal n bastará proyectar estas tres componentes
sobre la normal “n”
(5.32) reemplazando las relaciones (5.31) en (5.32) y simplificando:
Y el esfuerzo tangencial n sobre el plano oblicuo puede obtenerse mediante
la ecuación (5.29)
ESFUERZOS PRINCIPALES Y EJES PRINCIPALES
Como se sabe, un plano principal está definido como un plano sobre el cuál actúa el
esfuerzo normal máximo; y el cortante es cero. A este valor se le denomina
esfuerzo principal:
291

Si el plano oblicuo de la figura (5.14) es un plano principal con cosenos directores ,m y n, entonces:
S = y sus componentes respectivas en las direcciones x, y, z son:
reemplazando estas relaciones en (5.31):
ordenando,
que puede expresarse en forma de producto matricial de la forma:
(5.35-a)
Las ecuaciones (5.35) vienen a ser un sistema de ecuaciones homogéneas lineales
con incógnitas ,m,n ; que determinan la dirección del plano principal en el sistema
de ejes x-y-z. La solución no trivial debe dar valores no nulos de ,m y,n ; que
además verifican la relación:
De teoría matemática, el sistema de ecuaciones (5.35) tiene solución no trivial
solamente si el determinante de los coeficientes de ,m y n es igual a cero; es decir:
(5.37)
Entonces una de las tres ecuaciones (5.35) será la combinación lineal de las otras
dos, que conjuntamente con la ecuación (5.36), forman un sistema nuevo, suficiente
para determinar los valores de ,m y n.
El desarrollo del determinante producirá la siguiente ecuación cúbica, cuya solución
nos da los valores de los esfuerzos principales.
292

en forma simplificada esta ecuación puede escribirse como:
(5.39)
donde los coeficientes son:
(5.40)
Las tres raíces de la ecuación cúbica son reales. Estas raíces corresponden a los
tres valores de los esfuerzos principales:
Como puede observarse, las raíces de la ecuación cúbica se determinan por el
carácter del estado de esfuerzos y no dependen del sistema de ejes coordenados;
por lo tanto, al girar el sistema original x-y-z; los coeficientes 1, 2, e 3 de la
ecuación (5.39) se mantienen invariables.
A estos coeficientes se les denomina Invariantes del estado de esfuerzos.
Direcciones principales
Una vez conocidos los esfuerzos principales, es posible determinar sus cosenos
directores, resolviendo el sistema de ecuaciones (5.35), sucesivamente para:
.
Utilizando teoría matemática se demuestra, a partir de (5.35-a) y (5.36) que los
cosenos directores asociados a las direcciones principales verifican las siguientes
relaciones:
donde:
;
(*)
el subíndice “i” indica el plano principal de referencia.
293

PROBLEMA EJEMPLO: Dado el siguiente estado de esfuerzos, calcule los esfuerzos y
direcciones principales:
SOLUCION
Utilizaremos la ecuación cúbica por lo que requerimos conocer las invariantes:
Tenemos entonces:
Factorizando se obtiene:
Cuyas raíces en forma ordenada son:
Para determinar la dirección de , se sustituye su valor de 432 por
En las ecuaciones (5.35), luego:
Se observa que estas ecuaciones no son independientes por que (- 0.232) veces la
segunda más (-0.696) veces la tercera es igual a la primera ecuación.
De la segunda y tercera ecuaciones se obtiene:
Si además, debe cumplirse:
que al sustituir nos da: m = 0.1870, n = 0.560
Luego el eje principal correspondiente al esfuerzo principal máximo de 432 lb/pulg2
tiene la dirección “n”:
294

Las direcciones de se obtienen en forma similar sustituyendo
sucesivamente 0 y (-232) en las ecuaciones (5.35).
De la segunda y tercera ecuaciones se obtiene:
Si además, debe cumplirse: Luego el eje principal correspondiente al esfuerzo principal máximo de 0 lb/pulg2
tiene la dirección “n”:
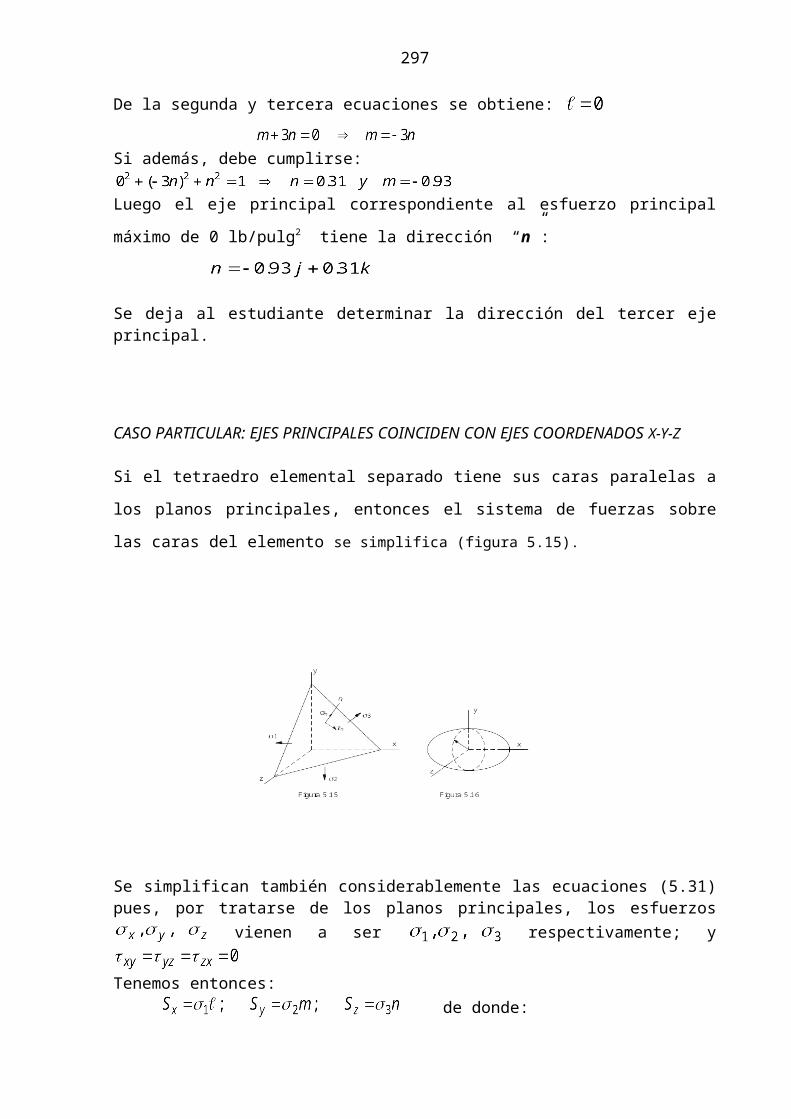
Se deja al estudiante determinar la dirección del tercer eje principal.
CASO PARTICULAR: EJES PRINCIPALES COINCIDEN CON EJES COORDENADOS X-Y-Z
Si el tetraedro elemental separado tiene sus caras paralelas a los planos principales,
entonces el sistema de fuerzas sobre las caras del elemento se simplifica (figura 5.15).
Se simplifican también considerablemente las ecuaciones (5.31) pues, por tratarse de los planos principales, los esfuerzos vienen a ser respectivamente; y Tenemos entonces:
de donde:
295

y reemplazando en la ecuación (5.32):
(5.41)
que viene a ser la componente normal del esfuerzo “S” en un plano definido por su
normal n, en función de los esfuerzos principales.
De la ecuación (5.30) para el esfuerzo S, tenemos:
(5.42)
La componente tangencial lo obtenemos reemplazando la ecuación (5.29) en (5.42) y despejando
(5.43)
Por otro lado, como: , resulta:
(5.44)
A esta relación se le puede dar una interpretación simple e ilustrativa. Las
magnitudes SX, SY, SZ vienen a ser las coordenadas del extremo del vector esfuerzo
resultante S que actúa en el plano de orientación arbitraria. El lugar geométrico de
los extremos del vector S forma un elipsoide cuyos semiejes son los esfuerzos
principales (figura 5.16). El elipsoide obtenido se denomina “elipsoide de
esfuerzos”.
De esta representación geométrica se deduce como corolario que el mayor de los
tres esfuerzos principales es al mismo tiempo el valor máximo posible del esfuerzo
resultante en el conjunto de planos que pasan por el punto que se analiza; el menor
de los esfuerzos principales será por otra parte el valor mínimo posible de los
esfuerzos resultantes.
DIAGRAMA CIRCULAR DEL ESTADO TENSIONAL.
A partir de las expresiones obtenidas para , es posible establecer
relaciones con los esfuerzos principales y obtener finalmente una ecuación
simplificada de fácil interpretación:
De (5.36): (5.45)
Reemplazando (5.45) en (5.43) :
296
Reemplazando (5.45) en (5.41):
Reemplazando (5.47) en (5.46)
Sumando y restando para completar cuadrados:
que podemos ordenar como:
(5.48)
Esta ecuación es de la forma:
Si cada par de valores ( representa un punto en un sistema de coordenadas
cartesianas, el lugar geométrico de esta ecuación es una circunferencia.
Para analizar el problema con más amplitud, se efectuará procesos de deducción
similares al que condujo a la ecuación (5.48).
Siguiendo el mismo procedimiento a partir de la ecuación (5.45) pero esta vez
reemplazando , se obtendrá:
(5.49)
Similarmente, pero con , se obtendrá:
297
(5.50)
A continuación discutiremos las distintas posibilidades, según la orientación del
plano en cuestión. Para cada caso utilizaremos una de las tres últimas ecuaciones
que se acaba de determinar.
a) Planos paralelos al eje x. Se utiliza la ecuación 5.48.
Tenemos entonces:
Los esfuerzos en estos planos pueden
representarse gráficamente como
puntos ( ubicados sobre una
circunferencia con centro en
y radio
Figura 5.17 a
Para planos no paralelos al eje x, ; en este caso en el segundo miembro de la ecuación (5.48)
y los radios de las circunferencias
correspondientes a estos planos
serán mayores que .
Figura 5.17 b
En consecuencia los puntos que representan los pares de valores correspondientes a estos planos estarán ubicados en la zona rayada, externa a la
circunferencia de radio (figura (5.17b)).
b) Planos paralelos al eje y.- Se utiliza la ecuación (5.50)
298

Los esfuerzos en estos planos estarán representados por puntos sobre la
circunferencia con centro en y radio (figura 5.18)
Para planos no paralelos al eje y; , en el segundo miembro de (5.50)
En consecuencia los radios de la circunferencia correspondientes a estos planos
serán menores que y los puntos están en el interior de la
circunferencia.
Figura 5.18
c) Planos paralelos al eje z.- Se utiliza la ecuación (5.49)
Los esfuerzos en estos planos estarán representados por puntos sobre la
circunferencia con centro en y radio (figura 5.19)
Para planos no paralelos al eje z, en el segundo miembro de la ecuación (5.49) se tendrá:
299

Figura 5.19
Los radios de las circunferencias correspondientes serán mayores que .
Por lo tanto los puntos que representan los pares estarán ubicados en la
zona rayada, exterior a la circunferencia de radio . (Fig. (5.19)).
Superponiendo los gráficos correspondientes a las tres circunferencias se puede
inferir que todos los puntos estarán ubicados en la zona comprendida entre
las tres circunferencias incluyendo también las fronteras. Los puntos estarán
ubicados en la zona rayada que se muestra en la figura 5.20
Figura 5.20
Ubicación de los puntos en el gráfico
Sean los puntos: ;
300

Figura 5.211) A partir del punto C, consideramos un ángulo X con la vertical, se traza una
recta hasta encontrar el punto G sobre la circunferencia de radio mayor.
2) Con centro en D se traza un arco de radio .
3) A partir del punto A, formando un ángulo Z con la vertical, se traza una recta
hasta encontrar el punto H sobre la circunferencia de radio mayor .
4) Con centro F se traza un arco de radio .
5) La intersección de ambos arcos es el punto R, cuyas coordenadas son y .
También es posible ubicar el punto en el gráfico, utilizando a los ángulos y
ó a y .
3-a) A partir del punto B y formando un ángulo Z con la vertical se traza una recta
hasta encontrar el punto K sobre la circunferencia de radio .
4-a) Con centro en E se traza un arco de radio .
5-a) La intersección de los arcos trazados en los pasos (2) y (4-a) es el punto R.
3-b) Del mismo punto B y formando un ángulo con la vertical se traza la recta
que corta en L a la circunferencia de radio .
4-b) Con centro en E se traza el arco de radio .
5-b) La intersección de los arcos trazados en los pasos (4) y (4-b) determinan el punto R.
301

Figura 5.22
- MÁXIMO ESFUERZO CORTANTE Es obvio que el radio del círculo exterior dará el módulo del máximo esfuerzo
cortante. El plano en el que concurre forma ángulos de 45° con los planos de
máximo y mínimo esfuerzos normales.
Figura 5.23
En el caso del estado plano es conveniente tomar en cuenta que el máximo esfuerzo
cortante dado por las expresiones analíticas no es necesariamente el máximo
esfuerzo de corte que actúa en el punto de análisis.
PLANOS Y ESFUERZOS OCTAÉDRICOS
302

Con el estado de esfuerzos principales se asocia lo que se conoce como planos
octaédricos, cada uno de los cuales tiene la misma inclinación respecto a los ejes
principales 1, 2, 3.
sus cosenos directores verifican:
Reemplazando estos valores de l, m y n
en la ecuación (5.41) obtenemos para el
esfuerzo normal a un plano octaédrico:
303

también, para el esfuerzo resultante S, reemplazando en la ecuación (5.42):
La componente tangencial n, utilizando las dos últimas ecuaciones.
efectuando operaciones y ordenando obtenemos:
ó en función de los esfuerzos cortantes máximos:
La denominación de octaédrico se debe a que los ocho planos que cumplen la
condición (5.51) se intersecan formando un octaedro regular.
Figura 5.25
Una discusión mas completa de estos esfuerzos octaédricos se hace en el estudio de “Los criterios de falla” para el diseño de elementos estructurales y de maquinas.

ESTADO DE DEFORMACIONES
El estado de deformaciones en el punto Q se determina por sus seis componentes, que como en el caso del estado de esfuerzos, constituye un tensor.
El análisis del estado deformacional demuestra que tiene propiedades idénticas a las del estado de esfuerzos.
Entre el conjunto de ejes que se pueden tratar por el punto que se
analiza, existen tres ejes ortogonales en los cuales en los cuales las
deformaciones angulares son nulas. Estos ejes se denominan Ejes Principales
del estado deformacional y, las deformaciones lineales en este sistema,
Deformaciones Principales.
Las deformaciones principales son las invariantes del estado de deformaciones.
(5.56)
cuyos coeficientes son las invariantes del estado de deformaciones.
Conocidos los valores de las deformaciones principales ; las
máximas deformaciones angulares.
con

PROBLEMA 5.18.- El estado tridimensional de tensiones en un punto esta determinado por:
a) Hallar la tensión total y su dirección, en el plano cuyos cosenos
directores son y n < 0
b) Magnitud del esfuerzo cortante y del esfuerzo normal al plano
referido.
c) Tensiones principales y sus cosenos directores
SOLUCIÓN
Primero hallamos el valor del coseno director ”n”
Condición n<0 n = -1/2
Tensión total en el plano:
Cálculo de las componentes de S:

Tenemos entonces
Reemplazando en la expresión de S2 y sacando raíz cuadrada:
- Dirección: cosenos directores
b) Componentes normal y tangencial del esfuerzo.
c) Esfuerzos principales.
Cálculo de las invariantes: I1, I2, I3