Embed Size (px)
Citation preview

501EnvironmetricsResearch Article
Received: 4 April 2010, Revised: 31 August 2010, Accepted: 20 September 2010, Published online in Wiley Online Library: 4 March 2011
(wileyonlinelibrary.com) DOI: 10.1002/env.1083
Estimating parameters for a stochastic dynamicmarine ecological systemMichael Dowda∗
Parameter estimation for stochastic dynamic systems is a core problem for the environmental and ecological sciences. Thisstudy considers parameter estimation for a simple nonlinear numerical model of marine biogeochemistry. We present anonlinear stochastic differential equation based model for estimating parameters from non-Gaussian ocean measurementscollected at a coastal ocean observatory. A sequential Monte Carlo procedure, or particle filter, provides for estimation ofthe time evolving state and also the basis for parameter estimation. Two approaches for estimating static parameters of thesystem are contrasted. The first is based on likelihood calculations, and the second on augmenting the system state with thestatic parameters. Sensitivity analysis identified two ecological parameters (in the differential equations model) and one sta-tistical parameter (governing the level of dynamical noise) as candidates for estimation. Computed likelihood surfaces werefound to be rough due to the sample based calculations; they also indicated the ubiquitous problem of ecological parameterdependence and identifiability. A modified state augmentation procedure, incorporating a smoothed bootstrap step, wasused here for parameter estimation. Realizations for the parameter values provided by this method allowed for calculationof moments and density estimates that matched well the properties of the likelihood. Incorporation of prior information onthe parameters was also considered within this context. It is concluded that such a modified state augmentation proceduresprovides a promising avenue in parameter estimation in numerical models. Copyright © 2011 John Wiley & Sons, Ltd.
Keywords: nonlinear dynamics; data assimilation; parameter estimation; stochastic differential equations; numerical models; statespace models; sequential Monte Carlo; particle filters; state augmentation
1. INTRODUCTIONDifferential equation (DE) based nonlinear dynamic systems provide the theoretical foundation for many disciplines of the environmentaland ecological sciences. Computational advances have lead to widespread application of associated numerical models for scientific study andenvironmental prediction. Improvement in measurement technologies has also given rise to many new types of environmental observations.Consequently, identifying methods for the synthesis of dynamic models and data to optimally estimate the environmental state and systemparameters has becoming a pressing issue, and is referred to as data assimilation (Bertino et al., 2003).
This study is concerned with estimating static parameters for a nonlinear stochastic dynamic ecological model. Such parameters are keyquantities as they embody the scientific knowledge of the system, and good estimates are needed for model calibration and prediction. Thespecific application undertaken is for a simple model of coastal marine biogeochemistry (describing the lowest trophic level of the marineecosystem), and represented by a system of nonlinear DEs (Dowd, 2005). We make use of multivariate non-Gaussian ecological observationstaken from a coastal ocean observing system established near Lunenburg, Canada. Online state estimation via nonlinear Monte Carlo filteringfor this system was undertaken in Dowd (2007). In that study, the parameters were considered to be fixed and known. Here, the emphasis ison how to determine the static parameters of this system.
In the oceanographic literature, this problem has been treated extensively for the case of deterministic models (Lawson et al., 1995; Spitzet al., 2001; Friedrichs et al., 2006). However, the governing equations are only a generally accepted, but incomplete, set of dynamics(Fennel and Neumann, 2004), and environmental forcing is often episodic and stochastic (Bjørnstad and Grenfell, 2001; Monahan andDenman, 2004). Consequently, it makes sense to incorporate stochastic elements into these dynamic models (Dippner, 1997; Bailey et al.,2004), and to consider carrying out data assimilation for these models (Jones et al., 2010). In doing so, this study addresses an importantgeneral problem—parameter estimation for systems governed by stochastic numerical models and having partially observed non-Gaussianmultivariate states.
Statistical approaches to parameter estimation for nonlinear dynamic systems fall broadly into two main classes, depending on whetherthe dynamics are treated as deterministic or stochastic. The former typically utilizes (constrained) optimization relying on adjoint equations(Bryson and Ho, 1969; Lawson et al., 1995) or may be treated from the perspective of nonlinear regression (Thompson et al., 2000). Otherstatistical procedures are also available (Harmon and Challenor, 1997, Wikle, 2003, Lele et al., 2007, Ramsay et al., 2007). It is notable that
∗ Correspondence to: Michael Dowd, Department of Mathematics and Statistics, Dalhousie University, Halifax, Nova Scotia, Canada B3H 3J5.E-mail: [email protected]
a Department of Mathematics and Statistics, Dalhousie University, Halifax, Nova Scotia, Canada B3H 3J5
Environmetrics 2011; 22: 501–515 Copyright © 2011 John Wiley & Sons, Ltd.

502
Environmetrics M. DOWD
straightforward MCMC is generally computationally infeasible for such problems that jointly estimate the time-varying state and parameters(Andrieu et al., 2010). For stochastic dynamics, the nonlinear and non-Gaussian state space model provides a useful framework and the basisfor this study. It relies on discretization of the governing DEs, and estimation of the prognostic variables of the system (the state) throughtime using sequential Monte Carlo (MC) methods approaches, either through filtering (Kunsch, 2005) or smoothing (Godsill et al., 2004).These ideas are readily extended to estimating time dependent parameters by augmenting them as part of the state vector (Kitagawa, 1998,Ionides et al., 2006). Moreover, a likelihood function can be defined in terms of the predictive density (Kitagawa, 1996). The focus of thisstudy is to examine ecological parameter estimation using both likelihood calculations and state augmentation for a coastal marine system.
This paper is structured as follows. Section 2 explores the general problem of parameter estimation for nonlinear stochastic dynamicsystems based on DEs and provides a self-contained overview of the problem. Section 3 describes the application of these ideas to marineenvironmental prediction for a biogeochemical model of Lunenburg Bay for the purpose of parameter estimation. A discussion and conclusionsfollows in Section 4.
2. BACKGROUNDThe general problem considered here is parameter estimation for partially observable stochastic dynamic models. Filtering solutions for stateestimation for a DE based ecosystem model were outlined in some detail in Dowd (2006, 2007). This study is concerned with estimation ofthe static parameters for such systems, a problem frequently referred to as model calibration. The basic elements are (i) a stochastic dynamicmodel and (ii) observations on the ecosystem state.
2.1. Dynamical model and observations
The class of models under consideration here are those governed by systems of stochastic ordinary differential equations taking the genericform
dx
dt= f (x, θ, ε) (1)
where x(t) is the (time continuous) state vector, θ are the static parameters, and f is the operator which represents the structural formof the governing equations. Any stochastic forcing is represented by ε(t); its statistical properties can be described parametrically withparameters contained in θ. Such nonlinear systems of DEs are the foundations of models in population biology, and the basis for the marinebiogeochemical model considered in Section 3. Their functional form is generally specified based on a mechanistic understanding of howthe system operates. They are characterized by complex nonlinear relationships between the state variables, potentially large dimensionality,and the uncertainty as to the exact functional form of the dynamics. As well, there are many unknown or uncertain parameters that must bespecified.
In practice, these nonlinear DEs are not amenable to analytic solutions, and must be integrated numerically as discrete time differenceequations (for notable exceptions see Gardiner, 2004). Similarly, observations on the system state are only available at certain time points.As such we assume that Equation (1) can be well approximated by a discrete time system of the form
xt = f (xt−�t, θ, εt) (2)
where xt is the state at time t. The state evolution equation is a Markovian transition equation in which the governing equations f move thesystem state forward an increment �t and depends only on the state at the previous time, xt−�t . The operator f is a discrete version of f inEquation (1). The parameter values are given by θ. The stochastic term, εt , is derived from its continuous counterpart ε(t). The Markovianproperties of Equation (2) implies that the state at any time can also be written as the distribution
xt ∼ p(xt |xt−�t, θ). (3)
Note that the time increment �t is arbitrary and refers to the period over which stochastic integration takes place. We hereafter (and byconvention) set �t = 1 and consider this to represent the time interval between observations.
In practice, there is generally available a numerical model that integrates Equation (1) and can be used to generate realizations of thestochastic process, to yield Equation (2). The ensemble properties of these realizations can be described by p(x1:T |x0, θ), which is thedistribution of the system state over time, x1:T = (x′
1, . . . , x′T )′, conditional on the initial conditions, x0, and the parameters, θ (which embody
information on the stochastic forcing).Available measurement information is used to estimate the time evolving state xt for t = 1, . . . , T , as well as the parameters θ. The
observations follow the conditional distribution
yt ∼ p(yt |xt, φ) (4)
where yt represents observations or measurements on all or part of the ecosystem state. The parameters of the measurement distribution aredesignated φ. For problems in ecology, it is typical to deal with data irregularly sampled in time, and a state vector that is only partially
wileyonlinelibrary.com/journal/environmetrics Copyright © 2011 John Wiley & Sons, Ltd. Environmetrics 2011; 22: 501–515

503ESTIMATING PARAMETERS FOR STOCHASTIC SYSTEM Environmetrics
observable. The observation set defined from times 1 through T inclusive is denoted y1:T = (y′1, y
′2, . . . , y
′T )′. (Note that estimation of φ is
not considered, but the ideas developed in this study would allow for its estimation. Hereafter, any explicit dependences on φ is dropped.)
Q1
2.2. State estimation
The Equations (2) or (3) and (4) together represent the well-known nonlinear and non-Gaussian state space model. The general problem ofcombining numerical models with observations to achieve best estimates of the system state and parameters has come to be known as dataassimilation. A complete solution for the system at any time t is given by p(xt, θ|y1:T ), which is the joint probability density function (pdf)of the state, xt , and parameters, θ, given all available observations, y1:T .
2.2.1. Filtering and smoothing
Consider first the case where θ is known and we wish to estimate the state, xt , when t = T , i.e. online prediction. This is the filtering problem(Jazwinski, 1970), and its solution is given by the filter density
p(xt |y1:t , θ) ∝ p(yt |xt, φ)p(xt |y1:t−1, θ). (5)
As a part of the above equation, the predictive density is computed by one step ahead prediction as
p(xt |y1:t−1, θ) =∫
p(xt |xt−1, θ)p(xt−1|y1:t−1, θ)dxt−1. (6)
Together Equations (5) and (6) outlines a single stage transition from p(xt−1|y1:t−1, θ) to p(xt |y1:t , θ). These filter densities are computedrecursively over the analysis interval.
For retrospective analysis when t < T , the smoother density is required (Hurzeler and Kunsch, 1998; Godsill et al., 2004). This is definedas
p(x1:T |y1:T , θ, φ) ∝ p(x0)T∏
t=1
p(xt |xt−1, θ)T∏
t=1
p(yt |xt, φ) (7)
which follows from the Markov property and conditional independence of the observations. The key quantities involved in filtering andsmoothing are the transitional density p(xt |xt−1, θ) (from the state evolution Equation (2)), and the likelihood function p(yt |xt, φ) (from themeasurement model). The filtering, predictive and measurement densities provide the building blocks for the parameter estimation approachof the next section. The smoothing density (7) is considered later only for the purpose of state reconstruction using the optimized parameters.
2.2.2. Sampling-based solutions
Solutions for the target pdfs above rely on sequential Monte Carlo methods (Ristic et al., 2004; Kunsch, 2005). These are represented as
{x(i)t|T } ∼ p(xt |y1:T , θ), i = 1, . . . n
where x(i)t|T represents the ith member of the ensemble (or sample), with the curly braces representing the entire ensemble. These can provide
samples drawn from the filter density (t = T using Equation (5)), the predictive density (t > T using Equation (6)), and the smoothing density(t < T using Equation (7)).
Filtering can be considered a two-step procedure for the single stage transition of the system from t − 1 to t comprised of: predictionusing Equation (6), and update using Equation (5). Prediction transitions from the filter density at time t − 1 to the predictive density attime t (or {x(i)
t−1|t−1} → {x(i)t|t−1}). This ensemble update is performed using stochastic dynamic prediction (2) for each ensemble member with
independent realizations of the system noise. To construct the filter density at time t (or {x(i)t|t−1} → {x(i)
t|t }) the Bayesian update of Equation(5) is carried out. There are various ways to do this using recursive (sequential) algorithms (see Arampalam et al., 2003; Bertino et al., 2003;Ristic et al., 2004; Dowd, 2007).
The parameter estimation procedures considered below all rely on repeated calculation of the predictive and filter densities. This studyuses the sequential Metropolis-Hastings (M-H) following Dowd (2007), and is further outlined in Liu and Chen (1998, Section 3.4), Gilksand Berzuini (2001), Lin et al. 2005, and Ristic et al. (2004, Section 3.5.3). The only modification used here in applying this MCMCindependence chain is to extend the algorithm to have an adaptive sample size. Specifically, the requirement is imposed to have a minimumnumber of distinct, or independent, particles denoted as nm and so the sample {x(i)
t|t } from the filter density will have a different number ofensemble members at each time t. Hence, the sample size, nt , will vary with time. This reduces the problem of sample impoverishment thatresults from cases where there is little overlap between the sample characterizing the predictive density and the likelihood. Note, however,that virtually any particle filtering method (e.g. sequential importance resampling) could be used to generate the required samples.
Environmetrics 2011; 22: 501–515 Copyright © 2011 John Wiley & Sons, Ltd. wileyonlinelibrary.com/journal/environmetrics

504
Environmetrics M. DOWD
2.3. Parameter estimation
The central focus of this study is parameter estimation for stochastic dynamic models. There are a wide variety of approximate approachesfor the special case of a deterministic model (εt = 0, ∀t), and the problem can be reformulated as nonlinear regression (Thompson et al.,2000). For stochastic dynamic models the problem is more complex.
For general parameter estimation, Bayes’ theorem yields the following (suppressing any implicit dependence on xt),
p(θ|y1:T ) ∝ p(y1:T |θ)p(θ) (8)
where the posterior of the parameters p(θ|y1:T ) depends on a likelihood p(y1:T |θ) and a prior p(θ). For ecological studies there is oftenconsiderable prior information on parameters and their ranges available from field and laboratory studies (e.g. Dowd, 2005). Careful treatmentof all sources of uncertainty is required (Poole and Raftery, 2000). In the application of Section 3, cases using strongly and weakly informativeprior information on parameters are considered in the context of sequential estimation.
2.3.1. Parameter estimation via the likelihood
Parameter estimation through sampling based characterization of the likelihood function is first considered. Given the observations y1:T , thelikelihood is defined (c.f. Kitagawa, 1996) as
L(θ|y1:T ) = p(y1:T |θ) (9)
=T∏
t=1
p(yt |y1:t−1, θ) (10)
=T∏
t=1
∫p(yt |xt, θ)p(xt |y1:t−1, θ)dxt. (11)
From recursive application of the sequential MC procedures we have available at time t the predictive ensemble
{x
(i)t|t−1
} ∼ p(xt |y1:t−1, θ), i = 1, . . . , nt−1
and so the integral in Equation (11) can be approximated as
At = 1
nt−1
nt−1∑i=1
p(yt |x(i)
t|t−1, θ). (12)
The likelihood can be written as
L(θ|y1:T ) =T∏
t=1
At (13)
with the log likelihood, or log L(θ) = ∑T
t=1 log At .The likelihood can therefore be evaluated based on the output of the sequential MC state estimation procedures outlined in Section 2.2.
Specifically, the likelihood calculation in Equation (11) relies on the predictive density (6). Its numerical evaluation in Equation (13) is basedon samples calculated by stochastic dynamic prediction from the filter state to the next observation time. The implication is that for finitesample sizes the computed likelihood surface is rough due to Monte Carlo variations (Hurzeler and Kunsch, 2001). Special optimizationprocedures for noisy non-smooth functions are needed for likelihood maximization (e.g. Tanizaki, 2001; Doucet and Tadic, 2003; VandenBerghen and Bersini, 2005). Here, we do not consider such maximization procedures, but rather simply profile the likelihood to identify itsmaximum, and examine its properties in comparison with the state augmentation procedure.
2.3.2. Parameter estimation via state augmentation
A straightforward way to estimate parameters was introduced by Kitagawa (1998) in the form of a self organizing state space model. This isbased on state augmentation, which appends to the state vector the unknown parameters:
xt =(
xt
θ
)(14)
wileyonlinelibrary.com/journal/environmetrics Copyright © 2011 John Wiley & Sons, Ltd. Environmetrics 2011; 22: 501–515

505ESTIMATING PARAMETERS FOR STOCHASTIC SYSTEM Environmetrics
and allows the parameter vector to evolve as
θt = θt−1. (15)
An augmented state is then defined to include both the original state and the parameters, i.e. x = (xt, θt)′. A sample from the target densityp(xt |y1:t) = p(xt, θ|y1:t) can then be obtained through standard filtering. These samples are designated as {x(i)
t|t } = {x(i)t|t , θ
(i)t|t } for t = 1, . . . , T .
In practice, the optimal parameter values are taken from the ensemble at the end of the time interval when t = T . A practical problem ariseswith state augmentation when a finite ensemble {x(i)
t|t , θ(i)t|t } characterizes the filter density p(xt, θ|y1:t), since the sample degenerates (loses
diversity) with increasing t. Adding random noise to Equation (15) is common solution for this degeneracy problem, so that θt = θt−1 + εt
(Gordon et al., 1993; Kitagawa, 1998). New and distinct ensemble members can then be created at each time step and so alleviate thedegeneracy problem attendant in the εt = 0 case. As noted by Hurzeler and Kunsch (2001), the variance of εt must also decrease at anappropriate rate as t increases to ensure convergence. A conceptual problem is that it treats the parameters as being (artificially) time varyingfor the purpose of the estimation algorithm (Liu and West, 2001). The practical problem is that the parameter estimates are over-dispersedand may drift from permissible values.
Motivated by the ideas of Hurzeler and Kunsch (2001) and Liu and West (2001) who suggest incorporating aspects of kernel densityestimation methods into state augmentation, the following procedure is used to carry out the transition of the augmented system, x, fromtime t − 1 to time t:
(1) Predict the original state forward in time: {x(i)t−1|t−1, θ
(i)t−1|t−1} → {x(i)
t|t−1, θ(i)t|t−1}. This uses stochastic dynamic prediction following Equation
(2). At this stage, the parameters associated with each member x(i)t|t−1 remain unchanged following Equation (15) so that θ
(i)t|t−1 = θ
(i)t−1|t−1.
(2) Update the original state (and carry the associated parameters) from step 1 using sequential MC with new observations yt or:{x(i)
t|t−1, θ(i)t|t−1} → {x∗(i)
t|t , θ∗(i)t|t }. (This could use also use standard particle filter based importance resampling to generate the new en-
semble). In doing this, the parameters values are locked to their corresponding state estimates. The * superscript indicates that this is anintermediate ensemble that will be altered in step 3 below.
(3) Update the parameters using a smoothed bootstrap: {x∗(i)t|t , θ
∗(i)t|t } → {x(i)
t|t , θ(i)t|t }. Here, a new parameter ensemble is generated from the old
one (but with the state remaining locked to its corresponding parameters). The algorithm is:(a) Transformation: A pre-whitening transformation is applied to the part of the sample associated with the parameters {θ∗(i)
t|t−1}, whichrenders it approximately i.i.d. multivariate normal. This is done by removing the mean, and transforming each sample member asθ(i)a = �−1/2�′θ∗(i)
t|t−1 where � and � are matrices of eigenvalues and eigenvectors of the covariance matrix of θ∗(i)t|t .
(b) Smoothed bootstrap (Silverman, 1990, section 6.4.1): The transformed sample {θ(i)a } is now resampled and jittered. That is,
θ(j)b = (1/c)(θ(j)
a + hε(j)). Here the superscripting j refers to the index associated with the resampled version of {θ(i)a } from step 3a.
The optimal width kernel smoothing window h is computed (Silverman, 1990, section 4.14), as is the over-dispersion correctionfactor c. The jitter term ε(j) ∼ N(0, I).
(c) Back-transform: The new parameter sample is then back-transformed into the original units yielding {θ(i)t|t } (where θ
(i)t|t = ��1/2θ
(j)b ).
The resampling index from step 3b is used to match the parameters to the corresponding state elements.
The net effect is to transform the sample for the augmented state from time t − 1, {xt−1|t−1}, to a new sample at time t, {xt|t}. Rejectionsampling is also incorporated to ensure that parameters remain non-negative even when jittered (‘jitter’ here refers to the addition of smallamounts of random noise).
The above procedure has the desirable property of locking the parameters to the corresponding state for each (multivariate) sample member.It also maintains any dependence structure which emerges between the parameters (which is the purpose of the transform and back-transform).
3. APPLICATION3.1. Ecological model and observations
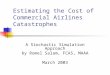
The study site considered here is Lunenburg Bay, Canada (44.36N, 64.26W). Ecosystem measurements are available from a coastalocean observatory and monitoring program. There are measurements of phytoplankton, P , which are derived from moored opti-cal instruments, and inorganic nitrogen N, which are available from bi-weekly water samples (see Figure 1). The multiple obser-vations on P and N available for any given day were treated as replicates and the following measurement distributions were ob-tained: (i) P observations follow a gamma(µ/β, β) distribution with β = 0.025 and the mean level, µ, varying in time and (ii) N
observations follow a lognormal distribution with the mean of this distribution varying daily and its standard deviation, σ = 0.67 −0.25 µ. Hence, the measurement Equation (4) can be fully specified, and we consider it known. Further details on this are found inDowd (2007).
A simple lower trophic level, nitrogen based ecological model has been designed specifically for operational prediction in LunenburgBay. Its structure is based on well-established ocean biogeochemical principles (Cullen et al., 1993), and guided by the observability ofthe ecosystem state. The ecosystem components considered are: phytoplankton (P) and inorganic nutrients (N). They are governed by thefollowing system of stochastic DEs:
dP
dt= N
kN + N(γ + �γ)P − λP2 + εP (16)
Environmetrics 2011; 22: 501–515 Copyright © 2011 John Wiley & Sons, Ltd. wileyonlinelibrary.com/journal/environmetrics

506
Environmetrics M. DOWD
Figure 1. Observations on phytoplankton P and nutrients N in Lunenburg Bay for 2004. Note that replicate observations are available for any given day
dN
dt= − N
kN + N(γ + �γ)P + λP2 + εN (17)
Additive dynamical noise (εP and εN ) is appended to each of the equations as source and sink terms. All quantities and their units aredefined in Table 1. Note that this model is focused on marine biogeochemistry, or the lowest trophic level of the ecosystem. Details on amore comprehensive ecosystem model which includes components such as zooplankton and detritus can be found in Dowd (2005).
Table 1. Definition of state variables and parameters in the ecosystem model with baseline values given
Quantity Units Value Definition
State variables (xt)P � mol nitrogen L−1 — Phytoplankton biomassN � mol nitrogen L−1 — Inorganic nutrientsγ d−1 — Photosynthetic rate
Ecological parameterskN � mol nitrogen L−1 2.5 Half-saturation for N uptake by P
λ � mol nitrogen L−1d−1 0.05 Grazing loss of P
γ(t) � mol nitrogen L−1d−1 0.2-0.6 Seasonal photosynthetic rateStatistical parameters
a d−1 0.1 Decay or memory for γ
αs — 0.5 Scale for system noise of state (P, N)αp — 0.2 Scale for system noise of dynamic parameter (γ)
Explicit dependence on time (t) is indicated, along with the range of values. Here, L is litres and d is days. Concentrations use molar units of nitrogen.
wileyonlinelibrary.com/journal/environmetrics Copyright © 2011 John Wiley & Sons, Ltd. Environmetrics 2011; 22: 501–515

507ESTIMATING PARAMETERS FOR STOCHASTIC SYSTEM Environmetrics
The cycling of nitrogen between the ecosystem components is controlled by the rate of photosynthesis. This growth rate parameter has adeterminstic part and a stochastic part: i.e. γ = γ + �γ . The deterministic part γ is time varying and corresponds to the maximum light limitedgrowth rate computed from using seasonal light information and a photosynthesis-light sub-model. The stochastic part evolves according tothe (Langevin) equation
d�γ
dt= −a�γ + εγ (18)
where a is a de-correlation time scale (set at 1/a = 10 days to match the meterological forcing band) and εγ represents dynamical noise.This system of coupled, nonlinear stochastic differential Equations (16)–(18) is solved as a numerical system with a Runge-Kutta scheme
modified to include stochastic forcing. This allows the dynamics to be stepped forward over any time interval via stochastic dynamicprediction, i.e. Equation (2), and so describes the Markov state transition (3). A 3 × 1 vector describes ecosystem state at any time t, i.e.xt = (Pt, Nt, γt)′. The system noise processes for the ecosystem state variables are assumed normally distributed, zero-mean, and independentthrough time (with a reflective boundary imposing non-negativity). The variance of the system noise scales with the (time-varying) level ofthe process: for the state, σ2
(P,N) = αs(P, N); and for the dynamic parameter, σ2γ = αpγ .
3.2. Model setup
The ecological model (16)–(18) was initially applied using the baseline parameter set of Table 1. This represents the best guess of theparameter values from previous studies (Dowd, 2005, 2007), prior to any attempt at their optimization or estimation. The sequential MCalgorithm for determining the filtering and predictive densities follows Sections 2.2. The M-H method uses an adaptive sample size (seebelow). In our application the M-H acceptance probability had a median of 0.64, and a range from approximately 0.2–0.9 depending on theoverlap between the predictive ensemble and the observation distribution.
The log likelihood was computed with the results from this baseline run of the particle filter using Equation (13). Figure 2 shows howthe value of the log-likelihood, log L varies with respect to the ensemble size nm. For each nm, 20 replicate values of L were computed andthe results summarized with a boxplot. At a given nm significant Monte Carlo variation in the value of L is evident. This variation is muchgreater for small ensemble sizes, and decreases with increasing nm (becoming relatively constant value after nm = 500). Most importantly,however, the median value for L starts to stabilize only after nm = 500. This bias is due to the under-prediction of log L by small ensembles.It has its origin in the inability of small samples to adequately and systematically generate realizations in the tails (extreme values) of thepredictive density. Based on these analyses, we choose nm = 500 for the remainder of this study.
3.2.1. Choosing a subset of the parameters
An important practical problem in ecological modelling is choosing a subset of the model parameters to be estimated. This is necessarysince there are often very many parameters in ecological models and their joint estimation may be problematic due to dependence issues
Figure 2. Box plots of the log-likelihood for the baseline parameter set using various nm (with 20 replicates each)
Environmetrics 2011; 22: 501–515 Copyright © 2011 John Wiley & Sons, Ltd. wileyonlinelibrary.com/journal/environmetrics

508
Environmetrics M. DOWD
Table 2. Results from computing the sensitivity factor S for the log-likelihood based on perturbations about the baseline ecosystemparameters (see text)
Parameter S
kN 2.49λ 2.70a 0.428αs 11.6αp 0.558
(Friedrichs et al., 2006). As well, in the ecological studies under consideration certain of the parameters may be quite well specified fromexternal sources.
Sensitivity analysis of a dynamic model is a standard way to identify important parameters (Saltelli et al., 2000). For this study, sensitivityis defined with respect to variations in the log-likelihood as follows:
Si = θ∗i
log L∗
∣∣∣∣∂ log L
∂θi
∣∣∣∣θ=θ∗
. (19)
The sensitivity, Si, is the scaled absolute value of the gradient of the log-likelihood evaluated for the baseline parameter set θ∗ (Table 1), withlog L∗ being the associated value of the likelihood. Computed values for Si are given in Table 2. On this basis, we see that the log-likelihoodis most sensitive to variations in two of the ecosystem parameters, kN and λ, and one of the statistical parameters, αs. These three parameterswill used henceforth for our parameter estimation experiments.
In this study, we also investigate the effect of certain types of prior information on the parameters of interest. Ecological modellingstudies typically rely heavily on prior information on the parameters as taken from laboratory and field studies. Relatively informative priorinformation is assigned as lognormal marginal distributions of our 3 parameters of interest (the dependence structure of the priors is notconsidered). Their means are taken following Table 1, and the standard deviations are taken as 25% of the mean. The prior distributions are then(i) kn ∼ lognormal(0.8498, 0.2462); (ii) λ ∼ lognormal(−3.1073, 0.2462) and (iii) αs ∼ lognormal(−0.7235, 0.2462). Below, parameterestimation is considered both with and without this explicit prior information.
3.3. Likelihood
Figure 3 shows contours for the log-likelihood function. These are reported with respect to the parameters λ and kN , for four values ofthe system noise αs. The following features are evident. The maximum in log L occurs near kN = 6 and λ = 0.03 (both of which are veryreasonable given literature values). The maximum log L for the system noise occurs at αs = 0.25 (not shown), but is relatively flat in the
Figure 3. Contours of the log-likelihood for the ecosystem model and measurements. This is reported for the parameters kN and λ computed on a 20 × 20 grid.The different panels shows the contours for various αs as indicated. This figure is available in colour online at wileyonlinelibrary.com/journal/environmetrics
wileyonlinelibrary.com/journal/environmetrics Copyright © 2011 John Wiley & Sons, Ltd. Environmetrics 2011; 22: 501–515

509ESTIMATING PARAMETERS FOR STOCHASTIC SYSTEM Environmetrics
Figure 4. Contours of the log posterior density for the ecosystem model and measurements. This is reported for in terms of the parameters kN and λ, forvarious αs as indicated. This figure is available in colour online at wileyonlinelibrary.com/journal/environmetrics
region from 0.2 to 0.4. The ridge in log L is due to the dependence between the ecosystem parameters. (This makes biological sense asincreasing mortality λ can be compensated for by decreasing kN , which removes the nutrient limitation and allows for growth of P). For allparameters, log L in the vicinity of its maximum is relatively flat and it is difficult to distinguish the peak exactly due to the Monte Carlovariations (roughness) in the grid of log-likelihood values.
In a Bayesian formulation, such as Equation (8), the posterior density of the parameters can also be computed using the likelihoodand prior information. Figure 4 shows the log posterior using the lognormal priors defined earlier. Clearly the likelihood in Figure 3 hasbeen altered by making use of prior information on the parameter values. The maxima have been shifted somewhat in accordance with
Figure 5. Time trace of parameter estimates from one realization of the state augmentation procedure. The median values (solid line) and 5th and 95thpercentiles are shown. The initial range of the parameter ensemble is also indicated (dotted lines)
Environmetrics 2011; 22: 501–515 Copyright © 2011 John Wiley & Sons, Ltd. wileyonlinelibrary.com/journal/environmetrics

510
Environmetrics M. DOWD
the prior and are now more well defined. The maximum likelihood is near αs = 0.3, but for the ecological parameters it occurs nearkN = 4.5 and λ = 0.04. As ecological parameter estimation generally relies on incorporation of prior information, this notion of explicitlyusing the prior to focus the likelihood might prove a useful means for treating inherent parameter identifiability problems (de Valpine,2004).
3.4. State augmentation
A key element in parameter estimation through state augmentation is the initial conditions in the form of a starting particle ensemble {θ(i)0 }.
This, in effect, acts as an initial prior, which sets the scope of the initial variation of the parameters and affects the subsequent values as thesequential estimation moves forward in time. Two cases are considered below: (i) a relatively weakly informative initial prior and (ii) a moreinformative initial prior for the parameters.
For case (i), the statistical parameter, αs, has an initial distribution that follows a uniform distribution with upper and lower limits definedas its maximum and minimum plausible values (i.e. Uniform(0.05, 0.8)). For the ecosystem parameters, kN and λ, initial uniform marginalswere similarly defined (0–12 for kN , 0.01–0.15 for λ). A dependence structure was also imposed on the ecosystem parameters by generating aninitial ensemble which followed a Gaussian copula with a correlation of −0.7. These initial conditions may be considered weakly informativeprior information, but are needed since not all values of parameters (or their combinations) are biologically admissible; parameters outsidethese ranges may also cause difficulties with numerical integration procedures for the governing DEs.
Figure 5 shows results from one realization for the parameters in the state augmentation procedure. It indicates that the variance of {θ(i)t }
decreases over time. In this instance, the median of the parameter values converges to kN = 4.4, λ = 0.067 and αs = 0.32. Note that thesevalues are close to the maximum in the log-likelihood surface shown in Figure 3.
However, repeated realizations of state augmentation yield different final estimates for the parameters. To illustrate, 2000 independent runsof the state augmentation procedure were carried out, with convergence occurring in all cases (convergence being defined as the standarddeviation of the final ensemble being less than 10% of its starting value). Figure 6 (solid lines) shows the marginal distributions of theparameter estimates from the state augmentation procedure. The mode is located at kN = 6.1, λ = 0.045 and αs = 0.20. It corresponds wellto the broad ridge defining the maximum in the likelihood surface (see Figure 3). Figure 7 shows the pairwise scatter plots of the results for the
Figure 6. Marginal empirical distributions for the three parameters from the state augmentation procedure. These were constructed using kernel densityestimation from 2000 replicates runs. For each parameter kN , λ and αs there are three distributions shown: (i) the parameter distribution using weak initialprior information on the parameters (solid line); (ii) the parameter distribution using strong prior information on parameters (dashed line) and (iii) the initial
prior distributions assumed for the parameter (dotted line)
wileyonlinelibrary.com/journal/environmetrics Copyright © 2011 John Wiley & Sons, Ltd. Environmetrics 2011; 22: 501–515

511ESTIMATING PARAMETERS FOR STOCHASTIC SYSTEM Environmetrics
Figure 7. Dependence structure of the parameters from state augmentation. The left panels show the pairwise scatter plots from 2000 realizations. Theright panels show the joint distributions constructed using kernel density estimation. This figure is available in colour online at wileyonlinelibrary.com/
journal/environmetrics
different parameter combinations. The corresponding empirical joint density estimates are also shown. Again, these indicate the dependenceof kN and λ, and the weak dependence of these ecological parameters with the statisical parameter αs.
In case (ii) more informative prior information on the parameters in the state augmentation procedure is used, we make use of the informativelognormal priors defined in Section 3.2. In this instance, these serve to specify the initial parameter ensemble {θ(i)
0 } (with the same dependencestructure between kN and λ as before). Figure 6 shows how the posterior marginals are shifted in accordance with the priors. The maximaare now at kN = 2.6, λ = 0.052 and αs = 0.23, which is slightly different from the direct computation using the likelihood. Figure 8 showsthe corresponding dependence structure of the state augmentation results. As expected, the distributions are much tighter and their centroidis shifted. The negative dependence between kN and λ is much weaker.
3.5. State reconstruction
State estimates for the prognostic ecosystem variables were reconstructed for the analysis period. As noted in Section 2.2, retrospective statereconstruction is a smoothing problem, not a filtering problem. As a consequence we apply the general state space smoother of Godsill etal. (2004) to evaluate Equation (7). This is carried out using a forward filtering step, followed by a backward smoothing step. Parameteruncertainty was incorporated using the observed spread from Figure 6 with strongly informative initial priors. This was incorporated intothe proposal generation step of the sequential MCMC algorithm. Again, the forward filter was based on the adaptive sample size M-H filterwith nm = 500. The backward smoothing was then used to create 500 independent realizations of the smoother density.
Figure 9 shows this smoother reconstructed ecosystem state using the optimal parameters. For P , the median state passes through theobservations, with relatively tight confidence intervals. For N, there is much more uncertainly inherent in the observations. Hence, themedian N, and the width of the confidence interval, are driven by both the direct N observations, as well as the indirect P observations. Theinformation is propagated from P to N via the dynamical Equations (16)–(17). The unobserved γ fluctuates around the deterministic cyclewith this growth rate modulated in such a way as to provide for the adaptation of P to its measured values (e.g. a decrease in growth rate willdecrease plankton concentrations after some time lag).
Environmetrics 2011; 22: 501–515 Copyright © 2011 John Wiley & Sons, Ltd. wileyonlinelibrary.com/journal/environmetrics

512
Environmetrics M. DOWD
Figure 8. Dependence structure of parameters from state augmentation using prior information on parameters incorporated into the initial ensemble. The leftpanels show the pairwise scatter plots. The right panels show the joint distributions constructed using kernel density estimation. This figure is available in
colour online at wileyonlinelibrary.com/journal/environmetrics
4. DISCUSSION AND CONCLUSIONSThis study investigated parameter estimation in the context of a stochastic dynamic system describing coastal ocean biogeochemistry.However, the ideas are generally applicable to systems governed by nonlinear stochastic differential equations that are partially observed.This problem of calibrating such differential equation based numerical models has received much attention in the marine sciences literaturefrom the perspective of nonlinear least squares optimization (e.g. Vallino, 2000; Spitz et al., 2001; Friedrichs et al., 2006). With stochasticelements increasingly being included in such models (Dippner, 1997; Bailey et al., 2004, Monahan and Denman, 2004), and new and complexobservational types becoming available, it is important to identify general and easily applied frameworks for parameter (and state) estimationfor numerical models (Breto et al., 2009; Jones et al., 2010).
Sequential Monte Carlo (MC) methods, or particle filters, are well established for state estimation in dynamic systems (Liu and Chen,1998), and have also been applied to a few realistic partial differential equation based geophysical systems (van Leeuwen, 2003; Mattern et al.,2010). A related approximate technique, the ensemble Kalman filter, has been widely applied to complex high dimensional systems (Evensen,2003). These provide general solutions for the nonlinear non-Gaussian state space model, and the algorithms are highly modularized. Here,an adaptive sample size sequential Metropolis-Hasting algorithm was used as the basis for filtering, however, any effective sequential MCapproach could be used.
Likelihood based parameter estimation via sequential MC approaches (c.f. Kitagawa, 1996) and sample based computation exhibitsuncertainty due to Monte Carlo variation (Hurzeler and Kunsch, 2001). Standard optimization approaches are then difficult to apply, andspecialized likelihood maximization methods have been developed (Tanizaki, 2001; Doucet and Tadic, 2003). In this study, likelihood surfaceswere mapped for a better understanding of their behaviour in the relevant part of parameter space, but no attempt was made at their explicitmaximization. Rather, their features are compared to, and used to validate, a related state augmentation approach for parameter estimation.
State augmentation, in the form of a self-organizing state space model, was introduced by Kitagawa (1998). In the geophysical literature,basic state augmentation is being experimented with using ensemble Kalman filter based data assimilation systems (Annan and Hargreaves,2004; Kondrashov et al., 2008). The advantage of state augmentation is that it offers a very straightforward way of estimating parameters inthe context of sequential Monte Carlo methods, such as particle filters. It is natural for treating time varying parameters, but must be adapted
wileyonlinelibrary.com/journal/environmetrics Copyright © 2011 John Wiley & Sons, Ltd. Environmetrics 2011; 22: 501–515

513ESTIMATING PARAMETERS FOR STOCHASTIC SYSTEM Environmetrics
Figure 9. The ecosystem state reconstructed from the smoothing algorithm. For each of three state variables the following are indicated: median (solid line),90% credible interval (grey shaded area) and observations (red dots). In the lower panel the deterministic part of the cycle, γ , is also indicated (dashed)
for estimating static parameters. In this guise it has so far had relatively little application due to some inherent difficulties (see Doucet andTadic, 2003). Here, the state augmentation procedure for static parameter estimation (Hurzeler and Kunsch, 2001; Liu and West, 2001) wasmodified to include a smoothed bootstrap step and its properties examined in the context of ecological parameter estimation.
The results from this study indicate that replicate runs of the state augmented filter yielded different results for the parameter estimates,due to Monte Carlo variation. The modified state augmentation was, however, able to produce parameter estimates, and elucidate dependencestructure, in a manner consistent with the parameter likelihood surface. However, due to the fact that multiple runs are required (therebyincreasing the computational load) this suggests that alternative approaches should be explored. The multiple iterated filter of Ionides et al.(2006) also operates on the principle of state augmentation but uses a set of linked particle filtering runs. A promising general approach isa hybrid of particle filtering and MCMC (Andrieu et al., 2010), but again this method requires careful consideration of highly correlatedvariables. Jones et al. (2010) also applies a hybrid approach to a plankton model.
Sensitivity analysis using the likelihood allowed for identification of three important parameters for estimation. The limitation of thisapproach for a nonlinear system is that parameter sensitivity will depend on the baseline parameter values from which sensitivity is computed.The optimal parameter values obtained through state augmentation (and the likelihood) provided a refinement on the baseline values used forprevious studies. The dynamical noise scaling factor, αs, was reduced in value (0.5 to 0.2) indicating that the fluid mechanics based mixingarguments used for its original specification (Dowd, 2007) had over-estimated its value. Similarly, the values for the phytoplankton loss term,λ, was slightly decreased (0.05 to 0.044), and nutrient uptake parameter, kN , was increased (2.5 to 6.1). These are important parameters forbiogeochemical models, but are notoriously difficult to specify, with the literature reporting a wide range of values.
The parameter estimation exercise also highlighted an inherent feature in ecological parameter estimation: dependence amongst theparameters (Friedrichs et al., 2006). This fact, coupled with the large number of dynamical and statistical parameters, raises the spectreof parameter identifiability. The practical solution taken here is to specify many of these values, and so focus on estimating a small set ofparameters which are both poorly known and strongly influence the model results (i.e. are sensitive parameters). In this study, we have alsoexperimented with state augmentation that allows for the inclusion of prior information on the range of the parameters and their correlationstructure.
Environmetrics 2011; 22: 501–515 Copyright © 2011 John Wiley & Sons, Ltd. wileyonlinelibrary.com/journal/environmetrics

514
Environmetrics M. DOWD
In this study, both the likelihood surface and realizations of the parameter values from state augmentation clearly showed that the selectedecological parameters kN and λ had a strong negative dependence (but were relatively independent of the statistical parameter αs). It wasdemonstrated how the sample characterizing the initial parameter density in the state augmentation should be constructed to build in thisdependence structure, as well as permissible ranges for the parameters. This is important since the stability of numerical models is oftentied to having reasonable ranges and dependence relations for parameter sets. A typical strategy to enhance parameter identifiability wasalso explored: incorporating prior information on parameters values from the extensive laboratory or field studies that are often available forecological studies.
There are a number of sources of stochasticity in the augmented state space model of this study. In their method of Bayesian melding,Poole and Raftery (2000) argue for an explicit accounting for all sources of uncertainty. In this application, simplifications include (i)measurements and stochastic model forcing which have been described by distributions with fixed parameters and (ii) dynamical parameterssome of which are treated are known, and others considered stochastic and so the subject of estimation. It is important to make an explicitall these assumptions and simplifications as they affect the validity of the estimation if one were to consider this from a fully Bayesianperspective.
In summary, statistical approaches for estimating parameters (and the time evolving state) for nonlinear dynamic systems is an important andtimely problem (Ramsay et al., 2007). These are highly relevant to many scientific disciplines and environmental systems, where accumulatedtheoretical background knowledge is embodied in mathematical models. For example in the marine ecological problem considered here,nonlinear models of uncertain structure with sparse, noisy and incomplete non-Gaussian measurements are the norm. Moreover, identificationof effective sequential Monte Carlo approaches which treat realistic higher dimension systems and take advantage of dynamical propertiesare crucial for effective data assimilation (Chorin and Krause, 2004; Mattern et al., 2010). It is suggested that further study of parameterestimation through state augmentation for a variety of dynamic systems and numerical models would prove a useful research direction.
ACKNOWLEDGEMENTSThis work was supported by an NSERC Discovery Grant to the author, as well as the National Program for Complex Data Structures, andthe Canadian Foundation for Climate and Atmospheric Science.
REFERENCES
Andrieu C, Doucet A, Holenstein R. 2010. Particle Markov chain Monte Carlo. Journal of the Royal Statistical Society Series B 72(3): 269–342.Annan JD, Hargreaves JC. 2004. Efficient parameter estimation for a highly chaotic system. Tellus 56A: 520–526.Arulampalam MS, Maskell S, Gordon N, Clapp T. 2002. A tutorial on particle filters for online nonlinear non-Gaussian Bayesian tracking. IEEE Transactions
on Signal Processing 50(2): 174–188.Bailey B, Doney SC, Lima ID. 2004. Quantifying the effects of dynamical noise on the predictability of a simple ecosystem model. Environmetrics 15:
337–355.Bertino L, Evensen G, Wackernagel H. 2003. Sequential data assimilation techniques in oceanography. International Statistical Review 71(2): 223–241.Bjørnstad ON, Grenfell BT. 2001. Noisy clockwork: time series analysis of population fluctuations in animals. Science 293: 638–643.Breto C, He D, Ionides EL, King AA. 2009. Time series analysis via mechanistic models. Annals of Applied Statistics 3: 319–348.Bryson AE, Ho Y. 1969. Applied Optimal Control. Blaisdell: Waltham Massachusetts; 481 pp.Chorin AJ, Krause P. 2004. Dimensional reduction for a Bayesian filter. Proceedings of the National Academy of the Sciences 101(142): 15013–15017.Cullen JJ, Geider RJ, Ishizaka J, Kiefer DA, Marra J, Sakshaug E, Raven JA. 1993. Towards a general description of phytoplankton growth for biogeochemical
models. In Towards a Model of Ocean Biogeochemical Processes, NATO ASI Series, Vol I 10, Evans GT, Fasham MJR (eds). Springer-Verlag: Berlin;153–176.
De Valpine P. 2004. Monte Carlo state space likelihoods by weighted posterior kernel density estimation. Journal of the American Statistical Association99(466): 523–536.
Dippner JW. 1997. Long term variability of a stochastic forced pelagic ecosystem model. Environmental Modeling and Assessment 2: 37–42Doucet A, Tadic VB. 2003. Parameter estimation in general state space models using particle methods. Annals of the Institute of Statistical Mathematics 55(2):
409–422Dowd M. 2005. A biophysical coastal ecosystem model for assessing environmental effects of marine bivalve aquaculture. Ecological Modelling 183(2–3):
323–346.Dowd M. 2006. A sequential Monte Carlo approach to marine ecological prediction. Environmetrics 17: 435–455.Dowd M. 2007. Bayesian statistical data assimilation for ecosystem models using Markov chain Monte Carlo. Journal of Marine Systems 68: 439–456.Evensen G. 2003. The ensemble Kalman filter: theoretical formulation and practical implementation. Ocean Dynamics 53: 343–367.Fennel W, Neumann T. 2004. Introduction to the Modelling ofMarine Ecosystems. Elsevier: Amsterdam; 330 pp.Friedrichs MAM, Hood RR, Wiggert JD. 2006. Ecosystem model complexity versus physical forcing: Quantification of their relative impact with assimilated
Arabian Sea data. Deep Sea Research II 53: 576–600.Gardiner CW. 2004. Handbook of Stochastic Methods. Springer: Berlin; 415 pp.Gilks WR, Berzuini C. 2001. Following a moving target-Monte Carlo inference for dynamic Bayesian models. Journal of the Royal Statistical Society Series
B 63(1): 127–146.Godsill SJ, Doucet A, West M. 2004. Monte Carlo smoothing for nonlinear time series. Journal of the American Statistical Association 99(465): 156–168.Gordon NJ, Salmond DJ, Smith AFM. 1993. Novel approach to nonlinear/non-Gaussian Bayesian state estimation. IEE Proceedings-F 140(2): 107–113.Harmon R, Challenor P. 1997. A Markov chain Monte Carlo method for estimation and assimilation into models. Ecological Modelling 101: 41–59.Hurzeler M, Kunsch HR. 1998. Monte Carlo approximations for general state space models. Journal of Computational and Graphical Statistics 7(2): 175–193.Hurzeler M, Kunsch HR. 2001. Approximating and maximizing the likelihood for general state space models. In Sequential Monte Carlo Methods in Practice,
Doucet A, de Freitas N, Gordon, N (eds). Springer: New York; 159–173.Ionides EL, Breto C, King AA. 2006. Inference for nonlinear dynamical systems. Proceedings of the National Academy of Sciences 103: 18438–18443.Jazwinski AH. 1970. Stochastic Processes and Filtering Theory. Academic Press: New York; 376 pp.
wileyonlinelibrary.com/journal/environmetrics Copyright © 2011 John Wiley & Sons, Ltd. Environmetrics 2011; 22: 501–515

515ESTIMATING PARAMETERS FOR STOCHASTIC SYSTEM Environmetrics
Jones E, Parslow J, Murray L. 2010. A Bayesian approach to state and parameter estimation in a Phytoplankton-Zooplankton model. Australian Meteorologicaland Oceanographic Journal 59: 7–16.
Kitagawa G. 1996. Monte Carlo filter and smoother for non-Gaussian nonlinear state space models. Journal of Computational and Graphical Statistics 5:1–25.
Kitagawa G. 1998. A self-organizing state space model. Journal of the American Statistical Association 93(443): 1203–1215.Kondrashov D, Sun C, Ghil M. 2008. Data assimilation for a coupled ocean atmosphere model. Part II: Parameter estimation. Monthly Weather Review 136(12):
5062–5076.Kunsch HR. 2005. Recursive Monte Carlo filters: algorithms and theoretical analysis. The Annals of Statistics 33(5): 1983–2021.Lawson LM, Sptiz YH, Hofmann EE, Long RL. 1995. A data assimilation technique applied to a predator-prey model. Bulletin of Mathematical Biology 57:
593–617.Lele SR, Dennis B, Lutscher F. 2007. Data cloning: easy maximum likelihood estimation for complex ecological models using Bayesian Markov chain Monte
Carlo methods. Ecology Letters 10: 551–563.Lin MT, Zhang JL, Cheng Q, Chen R. 2005. Independent particle filters. Journal of the American Statistical Association 100(472): 1412–1421.Liu J, West M. 2001. Combined parameter and state estimation in simulation based filtering. In Sequential Monte Carlo Methods in Practice, Doucet A, de
Freitas N, Gordon N (eds). Springer: New York; 197–217.Lui JS, Chen R. 1998. Sequential Monte Carlo methods for dynamic systems. Journal of the American Statistical Association 93(443): 1032–1044.Mattern JP, Dowd M, Fennel, K. 2010. Sequential data assimilation applied to a physical-biological model for the Bermuda Atlantic time series station. Journal
of Marine Systems 79: 144–156.Monahan AH, Denman KL. 2004. Impacts of atmospheric variability on a coupled upper-ocean/ecosystem model of the subarctic Northeast Pacific. Global
Biogeochemical Cycles 18, GB2010. DOI:10.1029/2003GB002100Poole D, Raftery AE. 2000. Inference for deterministic simulation models : the Bayesian melding approach. Journal of the American Statistical Association
95(452): 1244–1255.Ramsay JO , Hooker G , Campbell D, Cao J. 2007. Parameter estimation for differential equations: a generalized smoothing approach. Journal of the Royal
Statistical Society Series B 69:741–796.Ristic B, Arulampalam S, Gordon N. 2004. Beyond the Kalman filter: particle filters for tracking applications. Artech House: Boston, 318 pp.Saltelli A, Chan K, Scott EM. 2000. Sensitivity Analysis. Wiley: New York; 475 pp.Silverman BW. 1986. Density Estimation. Chapman and Hall: London; 175 pp.Spitz YH, Moisan JR, Abbott MR. 2001. Configuring an ecosystem model using data from the Bermuda-Atlantic time series (BATS). Deep-Sea Research II
48: 1733–1768.Tanizaki H. 2001. Estimation of unknown parameters in nonlinear and non-Gaussian state space models. Journal of Statistical Planning and Inference 96(2):
301–323.Thompson KR, Dowd M, Lu Y, Smith B. 2000. Oceanographic data assimilation and regression analysis. Environmetrics 11: 183–196.Vallino JJ. 2000. Improving marine ecosystem models: use of data assimilation and mesocosm experiments. Journal of Marine Research 58: 117–164.Vanden Berghen F, Hugues Bersini H. 2005. CONDOR, a new parallel, constrained extension of Powell’s UOBYQA algorithm: experimental results and
comparison with the DFO algorithm. Journal of Computational and Applied Mathematics 181(1): 157–175.Van Leeuwen PJ. 2003. A variance-minimizing filter for large-scale applications. Monthly Weather Review 131: 2071–2084.Wikle CW. 2003. Hierarchical Bayesian models for predicting the spread of ecological processes. Ecology 84(6):1382–1394.
Environmetrics 2011; 22: 501–515 Copyright © 2011 John Wiley & Sons, Ltd. wileyonlinelibrary.com/journal/environmetrics