Embed Size (px)
Citation preview

EtherCAT G:Ultimate I/O Performance

2018 is an anniversary year for EtherCAT. We launched EtherCAT at the Hannover Messe industrial show back in 2003. At the time, automation professionals were both surprised and enthusiastic about it. We designed and developed EtherCAT specifically for automation – in particular, for high-speed, motion-control- intensive automation tasks. We also optimised the system for maximum ease-of-use. A regular RJ45 Ethernet port on a computer was all it took to connect a CPU quickly and reliably to complex machines working with extensive pro-cess images. Suddenly, there was no need for the kind of dedicated communication controller commonly used for the protocol stack at the time. Large numbers of devices generating data quantities ranging from as little as two bits up to 64 kilobytes could be connected up easily in a linear arrangement without the need to configure addresses. These capabilities proved compelling – so much so that EtherCAT swiftly became a success within the automation sector and was subsequently adopted as a global standard. To date, more than 5,000 organizations have joined the EtherCAT Technology Group, and in many countries, EtherCAT has advanced to become one of the most widely embraced automation standards. Its technical advantages aside, EtherCAT has also shown itself to be enormously stable. The EtherCAT protocol was defined and implemented so perfectly 15 years ago that it has not required any modification since. Its immense stability – and outstanding performance – are the reason why EtherCAT
has found its way into many automation vendors’ product lines.
Time to take another leap forward
To coincide with SPS IPC Drives in November 2018, we are launching EtherCAT G and EtherCAT G10, both of which will give EtherCAT a major performance increase: EtherCAT G operates at the 1 Gbit/s transmission rate of standard Ethernet, and EtherCAT G10 even at 10 Gbit/s – 100 times faster than current standard EtherCAT with 100 Mbit/s! This massive step up in the transmission rate will allow far higher data throughput, though the effective gain will depend on factors like propagation delay times and the connection topology deployed. EtherCAT’s performance and simplicity have always been two key qualities. We are keeping it simple but at the same time we are giving the already out- standing performance of EtherCAT an enormous boost. Crucially, we have accomplished this without changing the protocol: EtherCAT G/G10 is fully compatible with conventional EtherCAT, and all of the field-proven features, including processing on the fly and distributed clocks, have been retained. This, combined with the speed increase, will enable users to create even more powerful control systems. EtherCAT is able to interconnect with EtherCAT G and G10. Using an EK1400 Coupler, for instance, it is possible to create what we call a branch, which steps the data rate down from 1 Gbit/s to 100 Mbit/s. With this new easy-to-manage branch model, users
can set up EtherCAT junctions, change transmis-sion rates, and moreover, they can implement parallel EtherCAT segments. This latter capability also allows major reductions in signal propagation times and therefore much shorter communication and cycle times as well. The coupler and other branch devices are designed to enable the entire 100 Mbit/s device ecosystem to be integrated seamlessly into a 1 Gbit/s or 10 Gbit/s network. As a result, cycle times in standard PLC appli-cations will be shorter; it will be possible to implement complex motion applications with an even greater number of axes; and data-intensive devices will be able to integrate directly into EtherCAT systems. Machine vision cameras or test and measurement equipment with high sampling rates, for instance, generate substantial quantities of data, and these can now be read in with very short cycles and the high efficiency EtherCAT is known for. EtherCAT G and G10 are not intended to replace standard EtherCAT, which works so well at 100 Mbit/s. The new high-speed variants are compatible enhancements that are simply intended as system expansions. EtherCAT G and G10, we are delighted to say, raise perfor-mance to entirely new levels that will enable our customers to build the best, highest-performing machinery in the world.
Talk to us about taking your machine performance to the next level. Hans BeckhoffManaging Director of Beckhoff Automation
“With EtherCAT G we want to help customers build the best, highest-performing machinery in the world”
2 We reserve the right to make technical changes.

EtherCAT milestones � 2003 EtherCAT technology introduced � 2005 Safety over EtherCAT � 2007 EtherCAT adopted as IEC standard � 2016 EtherCAT P for communication
and power � 2018 EtherCAT G
3We reserve the right to make technical changes.

100 Mbit/s
1 Gbit/s
10 Gbit/s
O I
Slave Slave
Processing on the fly
O
Telegram processing on the fly at 100 Mbit/s, 1 Gbit/s and 10 Gbit/s
EtherCAT G builds on the principles of the successful EtherCAT technology but moves the available data rates up to 1 Gbit/s and 10 Gbit/s. The EtherCAT protocol itself remains unchanged. As before, all of the devices on a network receive the telegrams sent by the EtherCAT master. Each EtherCAT slave still reads the data addressed to it “on the fly” and inserts its own data into the frame as the frame moves downstream; now, though,
EtherCAT G: Ultimate I/O speed
10
� 100BASE-TX � Vast choice of components
� 1000BASE-T � Integration of data-intensive devices � Very high bandwidth
� 10GBASE-T � Integration of EtherCAT G segments � Ultimate bandwidth
4 We reserve the right to make technical changes.

Telegram processing on the fly at 100 Mbit/s, 1 Gbit/s and 10 Gbit/s
it does this at 1 Gbit/s or 10 Gbit/s. Hardware propagation times are the only factor delaying telegram processing. The last device in a segment or stub line identifies an open port and utilises the full duplex feature of Ethernet network physics to send the telegram back to the master.
EtherCAT G and EtherCAT G10 also retain all other capabilities of EtherCAT. Devices with three or four ports (junctions) enable users to flexibly configure network topologies that
suit the exact requirements of their machine architecture. Optional machine modules can still be plugged and unplugged via the Hot Connect feature. Network-wide diagnostics are available to help minimise machine downtime and increase availability. And the built-in system of distributed clocks still ensures devices are synchronised precisely in better than 100 ns.
Common features � Real-time Ethernet down to the I/O level � Flexible topology � Outstanding diagnostics � Synchronisation accuracy better than 100 ns � Exceptionally simple configuration � Low system costs � Maximum performance � Ability to integrate functional safety � IEEE-802.3 compliant
EtherCAT G: Ultimate I/O speed
� 100BASE-TX � Vast choice of components
� 10GBASE-T � Integration of EtherCAT G segments � Ultimate bandwidth
Min. telegram length (0…46 byte user data)* = 6.08 µs Max. telegram length (1,500 byte user data)* = 122.40 µs
Min. telegram length (0…46 byte user data)* = 0.61 µs Max. telegram length (1,500 byte user data)* = 12.24 µs
Min. telegram length (0…46 byte user data)* = 0.06 µs Max. telegram length (1,500 byte user data)* = 1.22 µs
*incl. preamble and VLAN tag
5We reserve the right to make technical changes.
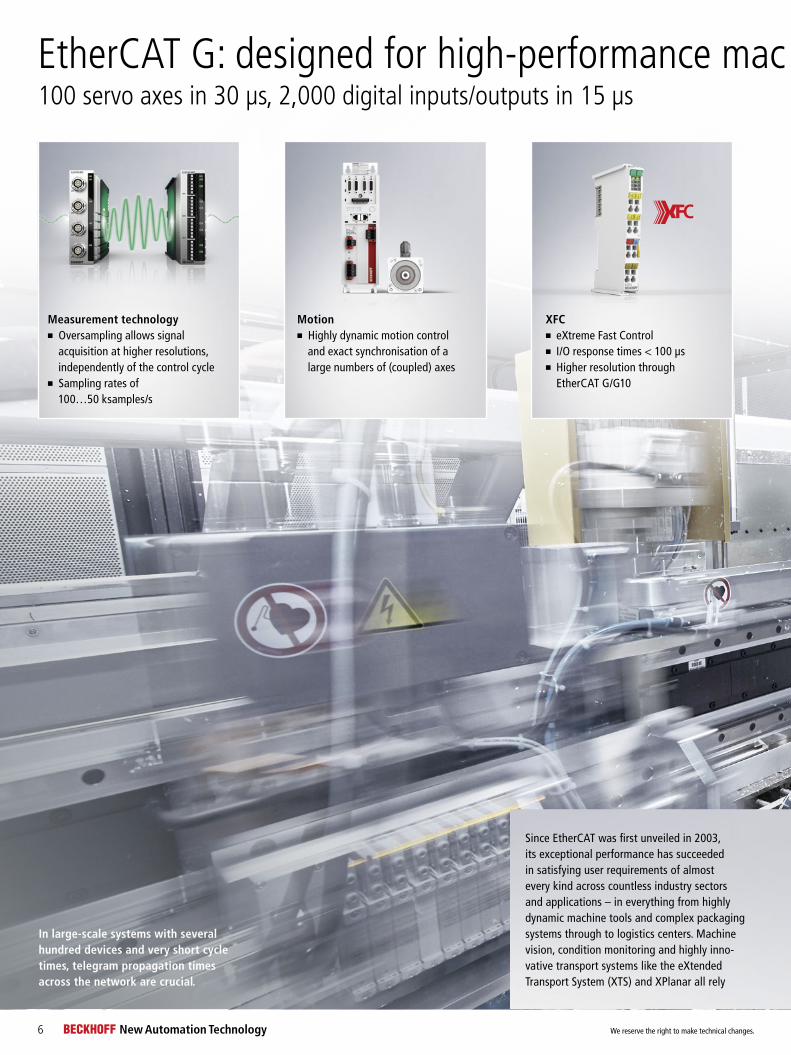
Since EtherCAT was first unveiled in 2003, its exceptional performance has succeeded in satisfying user requirements of almost every kind across countless industry sectors and applications – in everything from highly dynamic machine tools and complex packaging systems through to logistics centers. Machine vision, condition monitoring and highly inno- vative transport systems like the eXtended Transport System (XTS) and XPlanar all rely
In large-scale systems with several hundred devices and very short cycle times, telegram propagation times across the network are crucial.
EtherCAT G: designed for high-performance mac hines and highly complex applications
Measurement technology■ Oversampling allows signal acquisition at higher resolutions, independently of the control cycle ■ Sampling rates of 100…50 ksamples/s
XFC■ eXtreme Fast Control■ I/O response times < 100 μs■ Higher resolution through EtherCAT G/G10
Motion■ Highly dynamic motion control and exact synchronisation of a large numbers of (coupled) axes
100 servo axes in 30 μs, 2,000 digital inputs/outputs in 15 μs
6 We reserve the right to make technical changes.

on the ability to transmit several hundred bytes of process data per device and cycle. This, along with short cycle times of ≤ 1 millisecond, calls for high data bandwidths. With EtherCAT G, applications and systems like these can generally be supported with a single EtherCAT G master while at the same time incorporating other automation equipment or drives. The new branch model was developed to address growing de-mand for ever shorter cycle times in increasingly
extensive systems integrating large numbers of devices. Now, even large-scale systems can be synchronised and operated using a single, central master.
EtherCAT G: Expanding the application range of EtherCAT
� Machine vision in high resolution � High-end measurement technology
with high sampling rates � Complex motion control applications � XTS and XPlanar involving high data
rates and short cycle times
EtherCAT G: designed for high-performance mac hines and highly complex applications
Machine vision ■ Transmission of high-resolution images captured at rapid frame rates ■ Process-synchronised triggering of image capture
XTS ■ Very high data rates (25 Mbit/s per meter of XTS track) through trans- mission of actual mover positions and set-point values with very short cycle times
XPlanar ■ Infinitely variable positioning with six degrees of freedom calls for high data rates and fast response times
100 servo axes in 30 μs, 2,000 digital inputs/outputs in 15 μs
7We reserve the right to make technical changes.

CU1418 8-port EtherCAT G Branch Controller
EtherCAT Branch ManagementEtherCAT G: Branch Controller
EtherCAT is the leading communication standard in industrial automation, and this means machine builders today can choose from a broad, un- paralleled variety of thousands of compatible devices. This device compatibility is core for the technology expansion to EtherCAT G/G10. Designed for this purpose, the new branch model enables 100 Mbit/s Ethernet segments to be incorporated into EtherCAT G networks. Traffic forwarding onto these segments is conducted
on a priority and/or time-driven basis. Because each branch is treated as a separate EtherCAT segment, telegrams need not pass through all of the segments in series. Instead, the segments are processed in parallel, significantly reducing propagation times on large networks. In the same way, combinations with branches from EtherCAT G to EtherCAT G provide benefits. As usual with EtherCAT, the branch controllers can be configured via the EtherCAT master,
without the need for additional configuration tools. The branch controller supports diagnostics and distributed clocks synchronisation, forwarding both transparently to connected segments. Branch controllers with multiple branches offer users immense flexibility when creating network topol-ogies, and any existing EL, ELX and ELM terminals can be connected easily via an E-bus-equipped EtherCAT G Coupler.
� Integration of 100 Mbit/s devices and segments within EtherCAT G networks
� Parallel processing throughout segments enables significantly reduced propagation delay times.
� Universal diagnostics and synchronisation functions are still supported.
8 We reserve the right to make technical changes.

Segment #1
Segment #2
Segment #4
Segment #5
Segment #3
EtherCAT Branch Management
B
B
S
S
B
B
EtherCAT EtherCAT G EtherCAT G10 Branch Controller EtherCAT slave B S
100 Mbit/s
100 Mbit/s100 Mbit/s
100 Mbit/s
100 Mbit/s
1 Gbit/s
1 Gbit/s
1 Gbit/s
10 Gbit/s
10 Gbit/s
10
10
Master
B
10
9We reserve the right to make technical changes.
Segment #2.1
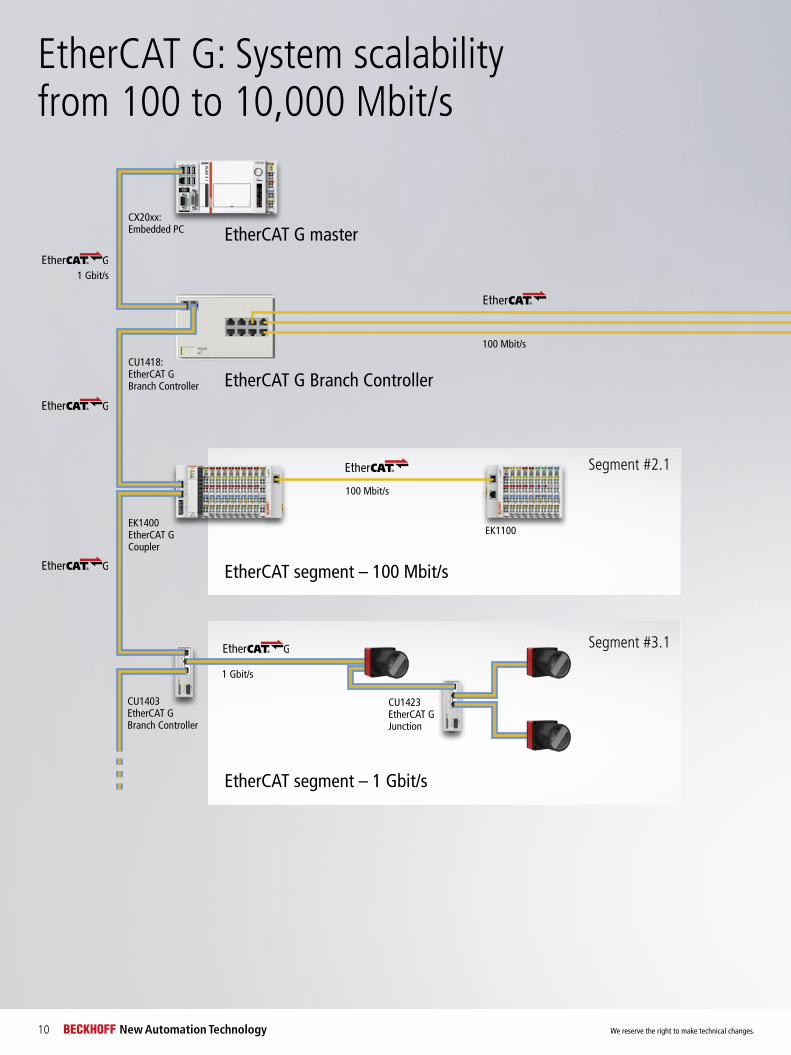
CU1418:EtherCAT G Branch Controller
EK1100
CU1403 EtherCAT G Branch Controller
EtherCAT G master
EtherCAT G Branch Controller
EtherCAT segment – 100 Mbit/s
CX20xx: Embedded PC
EK1400 EtherCAT G Coupler
Segment #3.1
CU1423 EtherCAT G Junction
100 Mbit/s
1 Gbit/s
100 Mbit/s
EtherCAT segment – 1 Gbit/s
1 Gbit/s
EtherCAT G: System scalability from 100 to 10,000 Mbit/s
10 We reserve the right to make technical changes.

Segment #1.3#n-1#1 #n#2
Segment #1.2#m-1#1 #m#2
IP 67 I/O
Segment #1.1
100 Mbit/s
100 Mbit/s
100 Mbit/s
Servo Drives
Servo Drives
Terminal I/O Terminal I/O
Any Beckhoff Industrial PC with a standard Gbit/s port can serve as an EtherCAT G master. TwinCAT carries out port control, and from a user’s perspective operation is no different. EtherCAT and EtherCAT G networks can be interconnected using a 3-port CU1403 branch controller. A branch can operate at 100 Mbit/s as well as 1 Gbit/s, depending on the devices connected.
The 8-port CU1418 branch controller supports a larger number of branches and thus a great- er variety of topologies. In addition, up to 8 branches can operate as independent EtherCAT or EtherCAT G segments, ensuring short cycle times, even with large numbers of connected devices. In contrast, the CU1423 EtherCAT G junction unit is designed simply to expand the network topology within a given segment without changing the transmission
rate. It supports no branch functionality as such. The EK1400 EtherCAT G Coupler enables the entire variety of Beckhoff EtherCAT Terminals to be used when implementing an EtherCAT G network. In addition, segments can be expanded using an EK1110 extension terminal and operat-ed as independent EtherCAT segments.
11We reserve the right to make technical changes.
0 µs
50 µs
100 µs
150 µs
200 µs
250 µs
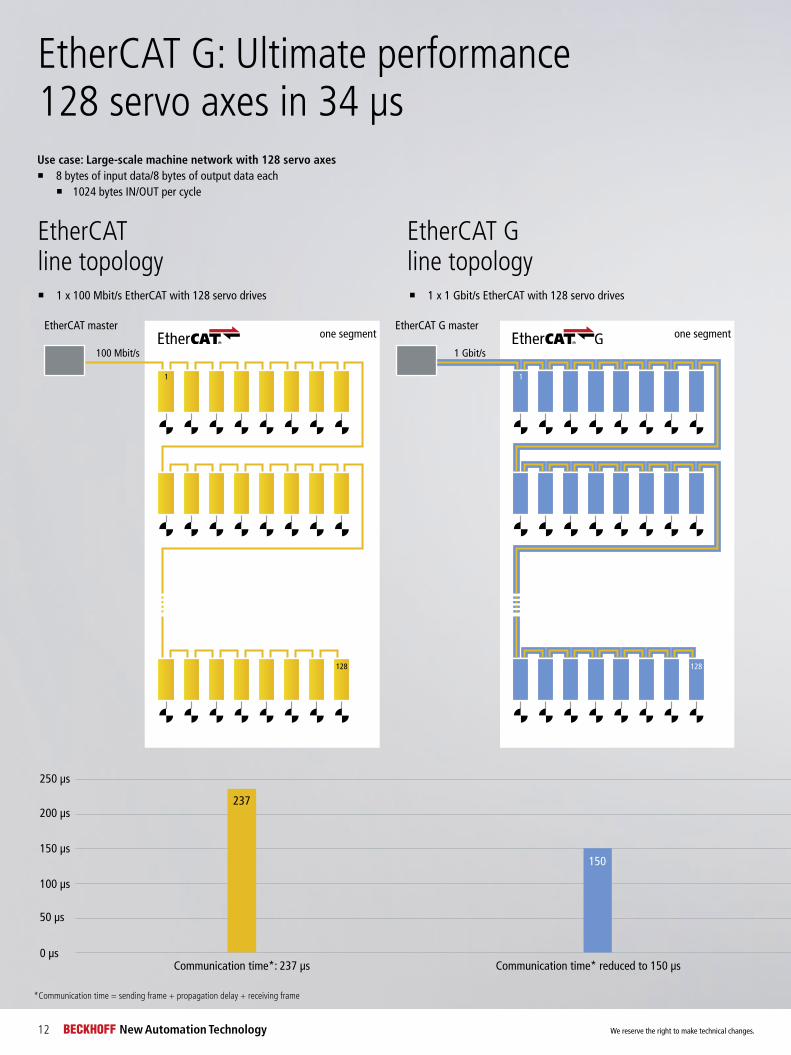
EtherCAT line topology
EtherCAT Gline topology
*Communication time = sending frame + propagation delay + receiving frame
EtherCAT G: Ultimate performance128 servo axes in 34 μs
one segment one segmentEtherCAT G masterEtherCAT master
� 1 x 100 Mbit/s EtherCAT with 128 servo drives � 1 x 1 Gbit/s EtherCAT with 128 servo drives
150
237
1 1
128 128
100 Mbit/s 1 Gbit/s
Communication time*: 237 µs Communication time* reduced to 150 µs
Use case: Large-scale machine network with 128 servo axes � 8 bytes of input data/8 bytes of output data each
� 1024 bytes IN/OUT per cycle
12 We reserve the right to make technical changes.

EtherCAT Gwith branch to 100 Mbit/s
EtherCAT G with branch to 1 Gbit/s
7 x faster5 x faster
EtherCAT G: Ultimate performance128 servo axes in 34 μs
one segmentEtherCAT G master
Segment S1.1
100 Mbit/s
100 Mbit/s
100 Mbit/s
Segment S1.2
Segment S1.8
EtherCAT G masterSegment S1.1
1 Gbit/s
1 Gbit/s
1 Gbit/s
1 Gbit/s1 Gbit/s
Segment S1.2
Segment S1.8
� 8 x 100 Mbit/s EtherCAT segments with 16 servo drives each � 8 x 1 Gbit/s EtherCAT G segments with 16 servo drives each
3449
11 16 16
32
128
32
128
B B
S S
Parallel data processing of segments reduces communication time significantly: 49 µs
EtherCAT G segments reduce the communication time even further: 34 µs
EtherCAT EtherCAT G Branch Controller EtherCAT slave B S
13We reserve the right to make technical changes.

EtherCAT
EtherCAT G: Ultimate performance200 analog inputs with 100 ksamples/s
Current solution: � 4 x 100 Mbit/s EtherCAT segments,
� each with 26 EL3702 Terminals and � 8 telegrams of 1313 bytes
Use case: Measurement technology, condition monitoring � 200 channels ±10 V analog inputs with at 100,000 samples/s
(10 µs measurement interval) per channel with 1 ms cycle time�� 322 Mbit/s of user data bandwidth required
88 % utilised bandwidth in each network segment
Remaining bandwidth EtherCAT 12 %
Consumed bandwidth (100 Mbit/s) 88%
One segment
One segment
One segment
One segment
100 Mbit/s
EtherCAT master
14 We reserve the right to make technical changes.

EtherCAT G
EtherCAT G: Ultimate performance200 analog inputs with 100 ksamples/s
New solution: one EtherCAT G segment � EK1100 Bus Couplers replaced with EK1400 EtherCAT G Coupler � Segments remain equipped with standard EtherCAT I/O Terminals (EL3702) � Communication time: 812µs
350 Mbit/s of bandwidth consumed 650 Mbit/s of bandwidth remaining
Consumed bandwidth EtherCAT G 35%
Remaining bandwidth EtherCAT G 65 %
S 1.1
S 1.2
S 1.3
S 1.4
S 1.8
S 1.5
1 Gbit/s
EtherCAT G master
S
B
B
B
B
B
B
EtherCAT EtherCAT G Branch Controller EtherCAT slave B S
15We reserve the right to make technical changes.

16 We reserve the right to make technical changes.
EtherCAT G: The product portfolio
EK1400 | EtherCAT G Coupler � Connects EtherCAT Terminals
to EtherCAT G network � EtherCAT G branch controller functionality
CU1403 | EtherCAT G branch controller, 3-port
� Connects EtherCAT and EtherCAT G segments to an EtherCAT G network
� For 3 branches � Transparent conversion of transmission
rates of EtherCAT G and EtherCAT
For availability status see Beckhoff website at: www.beckhoff.com

17We reserve the right to make technical changes.
CU1423 | EtherCAT G junction, 3-way
� EtherCAT G junction � Topology expansion
without changes in transmission rates
CU1418 | EtherCAT G branch controller, 8-port � Connects EtherCAT segments
to an EtherCAT G network � For 8 branches � Transparent conversion of transmission
rates of EtherCAT and EtherCAT G
FB1400 | EtherCAT G piggyback controller board
� EtherCAT G evaluation platform
� Compatible with EL9800 evaluation board
FB1450 | EtherCAT G10 piggyback controller board
� EtherCAT G10 evaluation platform
� Compatible with EL9800 evaluation board

18 We reserve the right to make technical changes.
EtherCAT Technology Group founded at SPS IPC Drives
2003
Introduction of EtherCAT technology at Hannover Messe
2003
Safety over EtherCAT
2005
EtherCAT – Global standard
EtherCAT: Ultra-fast communication standard

19We reserve the right to make technical changes.
EtherCAT is IEC standard
2007
EtherCAT G:The next performance level with 1 Gbit/s
2018
EtherCAT P: Ultra-fast communication and power via one cable
2016
control data. The low-footprint protocol uses a so-called black channel, making it completely independent of the communication system used.In 2007, EtherCAT is adopted as an IEC standard, underscoring how open the system is. To this day, the specification remains unchanged; it has only been extended and compatibility has been retained. As a result, devices from the early years, even from as far back as 2003, are still interopera-ble with today’s devices in the same networks.
In 2003, Beckhoff introduces its new EtherCAT technology into the market. The EtherCAT Tech- nology Group (ETG) is formed, supported initially by 33 founder members. The ETG goes on to standardise and maintain the technology. The group is the largest fieldbus user organisation in the world, with more than 5,000 members* cur-rently. In 2005, the Safety over EtherCAT protocol is rolled out, expanding the EtherCAT specification to enable safe transmission of safety-relevant *as of November 2018
Another milestone is achieved in 2016 with EtherCAT P, which introduces the ability to carry power (2 x 24 V) on standard Cat5 cable alongside EtherCAT data. This paves the way for machines without control cabinets. The launch of EtherCAT G in 2018 introduces higher data transmission rates. Interoperability with the existing EtherCAT equip-ment base is a core requirement, so steps are taken to enable integration, including introduction of the so-called branch model.
EtherCAT: Ultra-fast communication standard

Beckhoff Automation GmbH & Co. KGHülshorstweg 2033415 VerlGermanyTelefon: + 49 5246 [email protected]
DK3
292-
1118
Beckhoff®, TwinCAT®, EtherCAT®, EtherCAT P®, Safety over EtherCAT®, TwinSAFE®, XFC® and XTS® are registered trademarks of and licensed by Beckhoff Automation GmbH. Other designations used in this publication may be trademarks whose use by third parties for their own purposes could violate the rights of the owners.
© Beckhoff Automation GmbH & Co. KG 11/2018
The information provided in this brochure contains merely general descriptions or characteristics of performance which in case of actual application do not always apply as described or which may change as a result of further development of the products. An obligation to provide the respective characteristics shall only exist if expressively agreed in the terms of contract.
EtherCAT G: for the next performance level of your machine
www.beckhoff.com/ethercatg





























