Embed Size (px)
Citation preview

Rec
onfi
gura
ble
Con
trol
Des
ign
wit
h N
eura
l Net
wor
kA
ugm
enta
tion
for
a M
odif
ied
F-1
5 A
ircr
aft
AIA
A Infotech@Aerospace
2007
Co
nfe
ren
ce a
nd
Exh
ibit
7 -
10 M
ay 2
007
Dou
blet
ree
Hot
el S
onom
a W
ine
Cou
ntry
Roh
nert
Par
k, C
alifo
rnia
John
J. B
urke
n
NA
SA D
ryde
n F
light
Res
earc
h C
ente
r

Rec
on
fig
ura
tio
n
Pre
sent
atio
n O
utlin
e
λPu
rpos
e
λB
ackg
roun
d
λD
esig
n M
etho
ds U
sed
for
Pape
r
™B
ackg
roun
d on
Mod
el R
efer
ence
Ada
ptiv
e C
ontr
ol (
MR
AC
)
™B
ackg
roun
d on
Rob
ust S
ervo
mec
hani
sm L
QR
™R
adia
l Bas
is F
unct
ion
Neu
ral N
etw
orks
λC
ontr
ol F
ailu
re S
urvi
vabi
lity
Res
ults
λR
esul
ts /
Tim
e H
isto
ries
λC
oncl
usio
ns
™R
emar
ks
™L
esso
ns L
earn
ed

3
•Mo
tiva
tio
n /
Pro
ble
m S
tate
men
t {
Th
e B
ig P
ictu
re}
•L
and
a d
amag
ed a
irp
lan
e o
r, r
etu
rn t
o a
saf
e ej
ecti
on
sit
e.•O
r co
nti
nu
e w
ith
mis
sio
n
•Gen
eral
Go
als
& O
bje
ctiv
es•F
ligh
t ev
alu
atio
n o
f n
eura
l net
so
ftw
are.
•In
crea
sed
su
rviv
abili
ty in
th
e p
rese
nce
of
failu
res
or
airc
raft
dam
age.
•In
crea
se y
ou
r b
ou
nd
ary
of
a fl
yab
le a
irp
lan
e.•In
crea
se y
ou
r ch
ance
s to
see
an
oth
er d
ay.
Rec
onfi
gura
tion
Flig
ht C
ontr
ol S
yste
ms

Con
trol
Rec
onfig
urat
ion
Con
trol
Rec
onfig
urat
ion
λW
hy A
dapt
ive
Con
trol
.
™H
andl
es u
ncer
tain
ties
and
unp
redi
cted
par
amet
er d
evia
tion
s.
λW
hy R
obus
t C
ontr
ol (
Such
as
Rob
ust
LQ
R s
ervo
des
ign)
™H
andl
es u
nmod
eled
dyn
amic
s.
™H
as g
ood
flig
ht e
xper
ienc
e.
λSo
luti
on t
o A
dapt
ive
& R
obus
t co
ntro
l iss
ues.
™M
erge
ada
ptiv
e au
gmen
tati
on in
to a
rob
ust
base
line
cont
rolle
r.
Gen
eral
Bac
kgro
un
d /
Co
nce
pts

•T
wo
Typ
es o
f A
dapt
ive
cont
rolle
rs1.
Dir
ect
Ada
ptiv
e2.
Indi
rect
Ada
ptiv
e
•T
he D
irec
t A
dapt
ive
Con
trol
ler
Wor
ks o
n th
e E
rror
s.•
Nee
ds a
Ref
eren
ce M
odel
to
Gen
erat
e P
_err
= (
P_c
md-
Pse
nsor
)•
The
Neu
ral N
etw
ork
“Dir
ectl
y” A
dapt
s to
P_e
rr.
•D
oes
not
need
to
know
the
sou
rce
of e
rror
.•
No
Aer
o P
aram
eter
Est
imat
ion
Nee
ded
•N
o ne
ed f
or p
ersi
sten
tly
exci
ting
sig
nals
•T
he I
ndir
ect
Ada
ptiv
e W
orks
on
Iden
tify
ing
the
sour
ce o
f E
rror
.•
Doe
s N
ot N
eed
a R
efer
ence
Mod
el.
•N
eeds
to
Iden
tify
the
Aer
odyn
amic
s th
at h
ave
chan
ged!
(P
ID)
•P
ID is
Tim
e C
onsu
min
g an
d m
ay n
ot b
e co
rrec
t.•
Nee
ds p
ersi
sten
tly
exci
ting
inpu
ts.
Gen
eral
Sta
tem
ents
on
Ada
ptiv
e C
ontr
olle
r

Mod
el R
efer
ence
Ada
ptiv
e C
ontr
ol (
MR
AC
)M
odel
Ref
eren
ce A
dapt
ive
Con
trol
(M
RA
C)
λP
lant
: A
ctua
l Pla
nt p
aram
eter
s (G
) ar
e un
know
n.
λR
efer
ence
Mod
el:
Idea
l res
pons
e (y
m)
to c
md
r (U
se a
Sta
ble
Ref
eren
ce M
odel
).
λA
dapt
atio
n L
aw:
Is u
sed
to a
djus
t co
ntro
ller
(H):
can
be
NN
s.
Ref
eren
ce M
odel
:C
lose
d L
oop
Sys
Plan
t (G
)r
erro
r
Ada
ptiv
e L
aw (
NN
)
Con
trol
ler
(H)
+_
ym
yu
_+
Θ∧

Serv
omec
hani
sm D
esig
n M
etho
dolo
gy
cc
i
cc
cc
c
cc
cc
pm
n
xk
kx
u
pn
DC
BA
Ië
ran
k
UD
BB
xx
AC
B
0A
xx
sy
ste
m
MIM
O
a C
on
sid
er
is
co
ntr
oll
er
d
yn
am
ic
Th
e
y)
(rB
xA
x
s
urf
ac
e)
(f
ail
ed
e
dis
turb
an
c
the
w
Fw
D
uC
xY
Ry,
R
u ,R
x re
Ew
wh
eB
uA
xX
+=
+=
! "#$ %&
'
'
! "#$ %& '
+! "#
$ %& ! "#$ %& '
=
!! "#
$$ %&
'+
=
=
++
=
((
(+
+= ••
•
•
law
co
ntr
ol
aex
ist
th
ere
a
nd
le
con
tro
lla
b
is sy
stem
T
he
sati
sfie
d
is
con
dit
ion
fo
llo
win
g
the
S
up
po
se
is
syst
em
au
gm
ente
d
loo
p
op
en
Th
e
Not
e :
ℵ L
QR
Ser
vo =
LQ
R P
Iℵ
Jam
med
or
faile
d su
rfac
e is
tre
ated
a
s a
dist
urba
nce
to t
he s
yste
m.
ℑ A
ppro
ach
is s
impl
e to
impl
emen
t.
If th
is s
tate
men
t is
true
ther
eex
ist a
clo
sed-
loop
sys
tem
that
is s
tabl
e.

Ser
vom
ech
anis
m D
esig
n M
eth
od
olo
gy
(co
nt.
)
λR
emar
ks:
λFo
r an
y su
ch c
ontr
ol la
w, a
sym
ptot
ic tr
acki
ng a
nddi
stur
banc
e re
ject
ion
are
achi
eved
; tha
t is,
the
erro
rgo
es to
zer
o.λ
If th
e au
gmen
ted
syst
em is
con
trol
labl
e, th
e co
ntro
lla
w c
an b
e co
nven
ient
ly f
ound
by
appl
ying
the
linea
r qu
adra
tic r
egul
ator
(L
QR
) ap
proa
ch to
the
augm
ente
d sy
stem
.λ
Aft
er s
ettin
g up
the
augm
enta
tion
we
now
nee
d to
solv
e fo
r th
e ga
in (
k, k
c)™
Just
use
LQ
R.
™T
his
setu
p al
low
s fo
r a
LQ
R tr
acke
r so
lutio
n.
ccx
kkx
u+
=
Con
trol
Law
e=r!y"0
UD
BB
xx
AC
B
0A
xx
cc
cc
c
! "#$ %& '
+! "#
$ %& ! "#$ %& '
=
!! "#
$$ %&••
is
syst
em
au
gm
ente
d
Th
e

Ser
vom
ech
anis
m D
esig
n M
eth
od
olo
gy
(co
nt.
)
λO
ptim
ize
the
follo
win
g co
st f
unct
ion.
O
ptim
al li
near
-qua
drat
ic-r
egul
ator
(L
QR
) pr
oble
m.
λT
he a
lgeb
raic
Ric
cati
equa
tion
λA
nd th
e op
timal
con
trol
is g
iven
by:
dt
Ru
uQx
xJ
T
)(
'
0
'+
=!
PB
PBR
QPA
PA
'1
'0
!!
++
=
)(
)(
)(
'1
tKx
tPx
BR
tu
=!
=!

Why
Neu
ral N
etw
orks
?W
hy N
eura
l Net
wor
ks?
–Neu
ral N
etw
ork
s ar
e U
niv
ersa
l Ap
pro
xim
ato
rs.
–Min
imiz
es a
H2
no
rm.
–Th
ey p
erm
it a
no
nlin
ear
par
amet
eriz
atio
n o
f u
nce
rtai
nty
.
–Wh
y R
adia
l Bas
is F
un
ctio
ns
(RB
F):
–RB
Fs
will
de-
acti
vate
wh
en s
ign
al is
ou
tsid
e “n
eig
hb
orh
oo
d”.
!! "#
$$ %&'
'
=
()
2)
(
2r
x
ex
Act
ivat
ion
func
tion

λT
he o
utpu
t of
a R
BF
netw
ork
with
K n
euro
ns:
™
is
the
resp
onse
of
the
kth
hidd
en n
euro
n fo
rin
put v
ecto
r x.
™
is
the
conn
ectin
g w
eigh
t of
the
outp
ut n
euro
n.
! =
+=
=
K k
kk
bx
wx
NN
xf
1
)(
)(
)(
"
)(xk
!
kw
RB
F N
etw
ork
Out
puts

b x 1 x 2
f j
b x 1 x 2 x 3 x 1x 2
Σ
w0
w1
w2
w3
w4
w0 w1
w2
w3
w4
+ + + + +
f j =
1 ! ! ! !
mea
ns a
ctiv
atio
n fu
nctio
n!
Neu
rons
1 H
idde
n la
yer
with
4 N
euro
ns a
nd 2
Inpu
ts

Fai
lure
sF
ailu
res
Inve
stig
ated
Inve
stig
ated
2 gr
oups
of
failu
res
are
“com
mon
” am
ong
airc
raft
mis
haps
/cra
shes
.
•A
erod
ynam
ic F
ailu
res
or u
ncer
tain
ties
(A M
atri
x pr
oble
ms
/ lo
stae
ro s
urfa
ces,
ben
t win
gs)
•O
r N
ot w
ell k
now
n ae
ro te
rms
due
to m
odel
ling
erro
rs.
•C
ontr
ol F
ailu
res
(B M
atri
x pr
oble
ms
/ jam
med
con
trol
sur
face
s)•
Rig
ht s
tab
jam
med
at 8
. deg
fro
m tr
im

Con
trol
Rec
onfig
urat
ion
Res
ults
Con
trol
Rec
onfig
urat
ion
Res
ults
λT
ime
His
tory
of
Surf
ace
Fai
lure
( B
mat
rix)
λF
ailu
re =
Rig
ht S
tabi
lato
r Ja
mm
ed.
™A
t ti
me
= 1
0 se
cond
s / 8
deg
fro
m t
rim
.
™A
t ti
me
= 3
0 se
cond
s F
ailu
re g
oes
away
(cr
ew f
ixed
the
fai
lure
).
λN
eura
l Net
wor
ks
™N
eura
l Net
wor
ks t
urne
d of
f fo
r th
e fi
rst
run.
™N
eura
l Net
wor
ks t
urne
d on
for
sec
ond
run.
™W
itho
ut D
ead
Zon
es.

Rob
ust M
odel
Ref
eren
ce A
dapt
ive
Con
trol
Des
ign

Pilot InputsF
ailu
re =
Rig
ht S
tab
8. d
eg a
t 10
seco
nds
with
& w
ithou
t NN
Fai
lure
goe
s aw
ay a
t 30
seco
nds
/ Pilo
t Inp
ut is
Rol
l dou
blet
s
Pitchstick
Rollstick
Rudderpedal

Long Axis DataF
ailu
re =
Rig
ht S
tab
8. d
eg a
t 10
seco
nds
with
& w
ithou
t NN
Fai
lure
goe
s aw
ay a
t 30
seco
nds
/ Pilo
t Inp
ut is
Rol
l dou
blet
s
F-15
Lon
gitu
dina
l Par
amet
ers

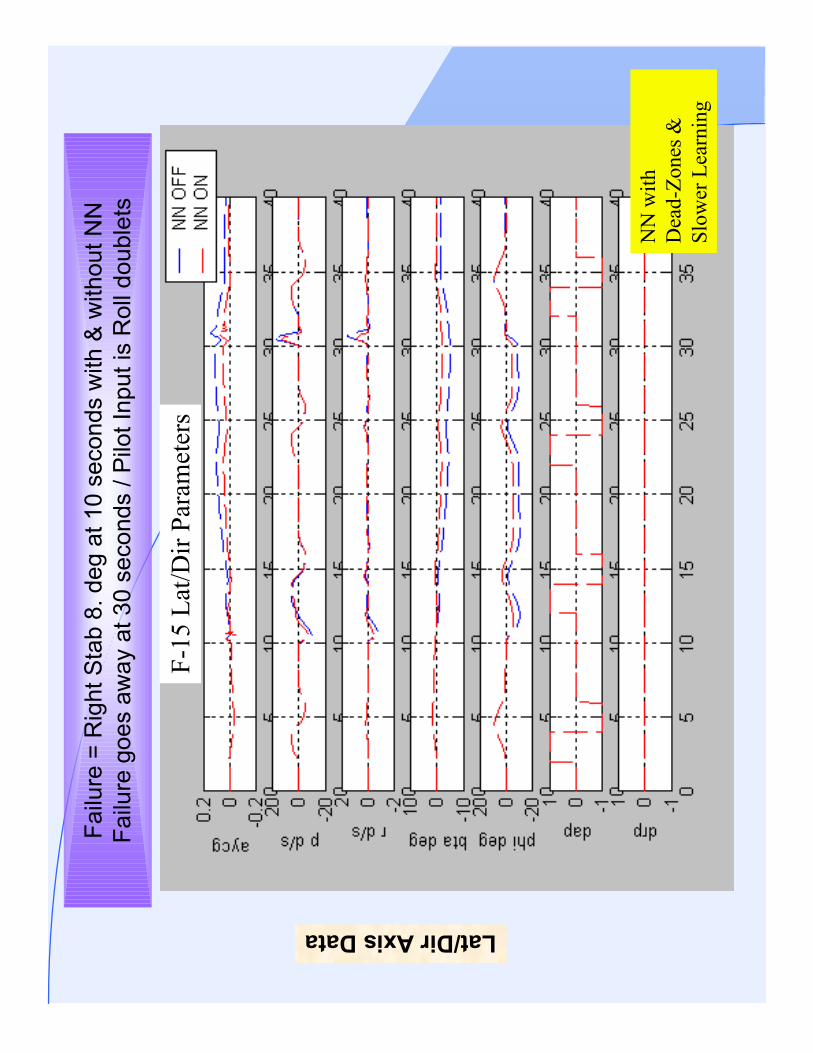
Lat/Dir Axis DataF
ailu
re =
Rig
ht S
tab
8. d
eg a
t 10
seco
nds
with
& w
ithou
t NN
Fai
lure
goe
s aw
ay a
t 30
seco
nds
/ Pilo
t Inp
ut is
Rol
l dou
blet
s
F-15
Lat
/Dir
Para
met
ers

Fai
lure
= R
ight
Sta
b 8.
deg
at 1
0 se
cond
s w
ith &
with
out N
NF
ailu
re g
oes
away
at 3
0 se
cond
s / P
ilot I
nput
is R
oll d
oubl
ets
Neural Network Signals

Surface Positions F
ailu
re =
Rig
ht S
tab
8. d
eg a
t 10
seco
nds
with
& w
ithou
t NN
Fai
lure
goe
s aw
ay a
t 30
seco
nds
/ Pilo
t Inp
ut is
Rol
l dou
blet
s

Con
trol
Rec
onfig
urat
ion
Res
ults
Con
trol
Rec
onfig
urat
ion
Res
ults
λT
ime
His
tory
of
Surf
ace
Fai
lure
( B
mat
rix)
λF
ailu
re =
Rig
ht S
tabi
lato
r Ja
mm
ed.
™A
t ti
me
= 1
0 se
cond
s / 8
deg
fro
m t
rim
.
™A
t ti
me
= 3
0 se
cond
s F
ailu
re g
oes
away
(cr
ew f
ixed
the
fai
lure
).
λN
eura
l Net
wor
ks
™N
eura
l Net
wor
ks t
urne
d of
f fo
r th
e fi
rst
run.
™N
eura
l Net
wor
ks t
urne
d on
for
sec
ond
run.
™W
ith
Dea
d Z
ones
& 2
0% d
ecre
ase
in le
arni
ng r
ates
.

Pilot InputsF
ailu
re =
Rig
ht S
tab
8. d
eg a
t 10
seco
nds
with
& w
ithou
t NN
Fai
lure
goe
s aw
ay a
t 30
seco
nds
/ Pilo
t Inp
ut is
Rol
l dou
blet
s
NN
with
Dea
d-Z
ones
&Sl
ower
Lea
rnin
g
Pitchstick
Rollstick
Rudderpedal

Long Axis DataF
ailu
re =
Rig
ht S
tab
8. d
eg a
t 10
seco
nds
with
& w
ithou
t NN
Fai
lure
goe
s aw
ay a
t 30
seco
nds
/ Pilo
t Inp
ut is
Rol
l dou
blet
s
NN
with
Dea
d-Z
ones
&Sl
ower
Lea
rnin
g
F-15
Lon
gitu
dina
l Par
amet
ers
Lat/Dir Axis DataF
ailu
re =
Rig
ht S
tab
8. d
eg a
t 10
seco
nds
with
& w
ithou
t NN
Fai
lure
goe
s aw
ay a
t 30
seco
nds
/ Pilo
t Inp
ut is
Rol
l dou
blet
s
NN
with
Dea
d-Z
ones
&Sl
ower
Lea
rnin
g
F-15
Lat
/Dir
Par
amet
ers

Fai
lure
= R
ight
Sta
b 8.
deg
at 1
0 se
cond
s w
ith &
with
out N
NF
ailu
re g
oes
away
at 3
0 se
cond
s / P
ilot I
nput
is R
oll d
oubl
ets
Neural Network Signals
NN
with
Dea
d-Z
ones
&Sl
ower
Lea
rnin
g

Surface Positions F
ailu
re =
Rig
ht S
tab
8. d
eg a
t 10
seco
nds
with
& w
ithou
t NN
Fai
lure
goe
s aw
ay a
t 30
seco
nds
/ Pilo
t Inp
ut is
Rol
l dou
blet
s
NN
with
Dea
d-Z
ones
&Sl
ower
Lea
rnin
g

•C
on
clu
sio
ns
& R
emar
ks
λM
eth
od
pre
sen
ted
:™
Ro
bu
st L
QR
Ser
vom
ech
anis
m d
esig
n w
ith
Mo
del
Ref
eren
ce A
dap
tive
Co
ntr
ol
∧R
efer
ence
Mo
del
was
a “
hea
lth
y”
airc
raft
.™
Use
d R
adia
l Bas
is F
un
ctio
n N
eura
l Net
wo
rks
λR
esu
lts:
™L
QR
Ser
vom
ech
anis
m b
ehav
ed w
ell w
ith
a f
ailu
re.
™U
sin
g t
he
Neu
ral N
etw
ork
s im
pro
ved
th
e tr
acki
ng
co
mp
ared
to
no
t u
sin
g t
he
neu
ral n
etw
ork
s.
λL
esso
n le
arn
ed:
™T
est
the
rem
ova
l of
the
failu
re w
ith
Neu
ral N
etw
ork
s ac
tive
to
en
sure
go
od
per
form
ance
.∧
Th
e cr
ew c
ou
ld f
ix t
he
pro
ble
ms
and
yo
u d
on
’t w
ant
the
adap
tive
sys
tem
to
go
un
stab
le.
Con
trol
Rec
onfi
gura
tion
Con
clus
ions