Embed Size (px)
Citation preview

EVOLUTION OF OPTIMUM STRUCTURAL SHAPES USINGGENETIC ALGORITHM
By Sharad Man Shrestha1 and Jamshid Ghaboussi2
ABSTRACT: The optimum structural shape design of skeletal structures has traditionally been solved by usingconceptual designs, often based on ground structures, in which the generated designs resemble the conceptualdesigns. If the design could be approached without the use of conceptual designs or ground structures, there isa potential for generating new and innovative designs, especially when more complex design problems areattempted. A methodology using such a design approach, made possible by the use of the genetic algorithm, isproposed in this paper. The proposed methodology uses the genetic algorithm to evolve optimum structural shapedesigns, which are free to assume any geometry and topology. The sizing, configurational, and topological aspectsof the design are simultaneously addressed. Discrete member sizes are considered. The methodology is capableof addressing single and multiple loadings, and plane or space structures. A new string representation scheme,generalized penalty function, and fitness function are introduced. The proposed methodology is applied to twoillustrative examples involving single-span plane trusses and the results described.
INTRODUCTION
The optimum shape design of skeletal structures has attracted research interest for almost a century (Michell 1904).Traditionally, various mathematical programming techniqueshave been applied, many using "ground structures" (Dorn etal. 1964; Dobbs and Felton 1969). The traditional research hasconcentrated primarily on sizing optimization, followed byconfiguration and layout optimizations, which is counterintuitive considering the potential for savings (Topping 1983; Vanderplaats 1984; Kirsch 1989; Topping 1993). This indicatesthe relative complexities of the problem involved. The problem is especially challenging when sizing, configurational, andlayout optimizations are considered simultaneously.
Genetic algorithm (GA) (Holland 1975; Goldberg 1989) hasbeen applied to this problem using various approaches: (1)sizing optimization with fixed configuration and layout (Goldberg and Samtani 1986; Rajeev and Krishnamoorthy 1992;Oshaki 1995; Wu and Chow 1995b); (2) sizing and configurational optimization with fixed layout (Wu and Chow 1995a;Galante 1996); (3) sizing and topology optimization with fixedconfiguration based on ground structure (Hajela et al. 1993;Rajan 1995); and (4) sizing, configuration, and layout optimization based on ground structure (Rajan 1995).
The use of conceptual designs, often based on ground structures, makes design problems amenable to solutions. In thisapproach, the generated designs would be strongly influencedby the conceptual designs. This class of problems, best described as "structured" optimization problems, is characterized by the overall designs that are preconceived at the outset.
If, on the other hand, the design problems are kept free ofconceptual designs, or ground structures, there is a potentialfor generating more efficient innovative designs, especiallywhen more complex design problems are attempted. However,the design freedom thus achieved makes the problems moredifficult to solve. This class of problems, which may be bestdescribed as "unstructured" optimum design problems, ischaracterized by designs that are allowed to emerge free of
'Doctoral Candidate. Dept. of Civ. Engrg.• Univ. of Illinois at UrbanaChampaign, IL 61801.
'Prof.• Dept. of Civ. Engrg.• Univ. of Illinois at Urbana-Champaign,IL.
Note. Associate Editor: Jasbir S. Arora. Discussion open until April 1,1999. To extend the closing date one month, a written request must befiled with the ASCE Manager of Journals. The manuscript for this paperwas submitted for review and possible publication on September 27,1996. This paper is part of the Journal of Structural Engineering, Vol.124, No. 11, November. 1998. @ASCE. ISSN 0733-9445/98/0011-13311338/$8.00 + $.50 per page. Paper No. 14284.
preconceived designs. A methodology for solving this class ofdesign problems is proposed in this paper.
The proposed methodology uses GA to evolve optimumshape designs for skeletal structures. The methodology is freefrom conceptual designs; therefore, the evolved structures arefree to assume any geometry and topology. The three aspectsof skeletal structures, sizing, geometry, and topology, are simultaneously considered. The number and position of nodesand number and connectivity of members are free of restrictions. The members are chosen from a set of discrete membersizes. The methodology introduces a new string representationscheme, a new generalized penalty function for addressing design constraints, and a new fitness function for addressing design objectives.
PROBLEM DESCRIPTION AND FORMULATION
The proposed methodology introduces the concept of physical design space, which is the specified physical space withinwhich the generated structure must be fully enclosed. It canhave any arbitrary contiguous shape and may contain internal"holes" through which no part of the generated structure mustpass. The physical design space allows limits to be imposedon the shape of the generated structure, which is importantfrom the functionality considerations.
The evolved structure can acquire any shape within thephysical design space. Some important features of the evolvedstructures are listed below:
1. The structure can have any number of free nodes. It canalso have specified partially fixed or fixed nodes, someof which may be loaded or support nodes. The free nodescan occupy any position within the physical designspace, whereas the partially fixed nodes will have someof their nodal coordinates specified. Similarly, the structure can have any number of members, with any patternof nodal connectivity. It can also have members whoseend nodes, which must be either fixed or partially fixed,are specified. The partially fixed and fixed nodes and thefixed members, if specified, must be present in all thegenerated structures.
2. The members are chosen from a set of discrete membersizes, assumed to be a subset of commercially availablemember sizes from standard design manuals.
3. The structure may be subjected to either static or moving,single or multiple loadings. They may include selfweight of the structure, various live loads, moving loads,or any other loadings required by the design codes.
JOURNAL OF STRUCTURAL ENGINEERING / NOVEMBER 1998/1331
J. Struct. Eng. 1998.124:1331-1338.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Nor
thea
ster
n U
niv
Lib
rary
on
06/2
9/13
. Cop
yrig
ht A
SCE
. For
per
sona
l use
onl
y; a
ll ri
ghts
res
erve
d.

TABLE 1. Details of Member and Nodal Constraints
NEW METHODOLOGY FOR SHAPE OPTIMIZATION
13
112
14~ /11
-- --15/1".18
16 n
Sector Ns
•
K31K2K4""- /KI
KS71""-KBK6 K7
NodeK
••••5
Node I
43
-I Sector I Sector 2 Sector 3 Sector 4
2
Nodal Information I Member Information
LS/1""-LSL6 L7
NadeL
(b) Structure of Substring Corresponding to a Specific Node
(a) String Representing a Structure. Composed of NN Substrings
.-- ---'1 IL- _
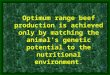
a number of sectors (plane angular sectors for two-, and rightpyramidal sectors for three-dimensional physical designspace), each possessing a specific set of member propertiesand a measure of its priority with respect to other sectors (Fig.1). Each member passes through two sectors, one at each endnode, and inherits its properties from the sector with the higherpriority, or the dominant sector. Each sector around a node isuniquely related to a specific sector around another node suchthat a member connecting the two nodes passes through therelated sectors, provided the number and size of sectors aroundthe nodes are equal. The size of the sectors are kept reasonablysmall in order to minimize the possibility of two or more members passing through the same sector and inheriting the samemember properties set. The member information set in eachsector consists of (1) member active/inactive status; (2) sectorpriority; (3) member type; and (4) connection type (e.g., moment or hinge connection).
The string representing a structure is made up of a fixednumber of identical substrings, each corresponding to a specific node (Fig. 2). The use of fixed-length strings does notlimit the number of nodes in a structure, since the strings canbe initially specified to any desired length. The proposed stringrepresentation scheme does not impose an upper limit on thestring length. Within the bound of the string length used, thesynthesized structures can acquire any number of nodes andmembers because of the ability of the nodes and members toswitch themselves on or off.
Only active nodes, as determined from the nodal active/inactive genes, are used to synthesize the represented structure.
Node]
FIG. 1. Sectorial Representation Scheme for Member Properties
Remarks(3)
aJ =stress in member ja.) =allowable stress for member jFor ~ension. a.J • 0';; compression, ua,
cr.,sJ =slenderness ratio of member js') = allowable slenderness ratio for mem
berjForctension. sa, - s;; compression. 8d, •
S.
IJ =length of member j1'0 = allowable minimum length for mem
bersIJ =length of member jI., =allowable maximum length for mem
bersal. a; =areas of symmetric member pair j
(b) Nodal constraints
al-=1a;
xl,-;; =IXJI
dJ, dJI =displacement of node j along coordi-d :s I nate direction I
" d., =allowable nodal displacement alongcoordinate direction I
xII. x;' =coordinates I of symmetric nodalpairj
(a) Member constraints
Necessarycondition
(2)
Stress
Constraint(1 )
Slenderness ratio
Minimum length
Maximum length
Member symmetry
Displacement
Nodal symmetry
In addition to the above, the generated structure can containtruss or beam elements or both. The supports can be eitherfixed, rollered, or pinned, which mayor may not be specified.
The proposed methodology can address various design objectives and constraints. The design constraints are classifiedinto member and nodal constraints. In the illustrative examplespresented later in this paper, weight minimization is consideredas the design objective; the member constraints considered arestress, slenderness ratio, minimum member length, maximummember length, and member symmetry; the nodal constraintsconsidered are nodal displacement and nodal symmetry. Thepertinent details about these constraints are shown in Table 1.
Note: Allowable stresses for compression members are determined from buckling considerations.
The proposed methodology uses a GA to evolve optimumstructural shape designs. A population of randomly generateddesigns are represented in binary strings, using the proposedstring representation scheme. The genetic operators, consistingof reproduction, crossover, and mutation, act on them over anumber of generations, evolving increasingly fitter designs.The evolution of fitter designs proceeds under selection pressure, which depends on the relative fitness of the individualdesigns, calculated using the proposed fitness evaluationscheme. The design constraints are enforced by penalizingtheir violation by means of the proposed generalized penaltyfunction.
String Representation and Structural Synthesis
Nodes, members, or both can be used to represent skeletalstructures in strings. In the proposed string representationscheme, only nodes are explicitly represented in fixed-lengthstrings, using binary coding. Each string encodes informationon a fixed number of nodes in the physical design space (seeFig. 5 for an example of rectangular physical design space).The nodal information represented is (1) nodal active/inactivestatus; (2) nodal coordinates; and (3) support type (relevantfor support nodes).
Conceptually, the space around each node is discretized into
~ 8 8 8 " a eo& ~'t::
'" '" '" $;g 0
~ §'" c c c '" ifIt ] 'E 1 a It~
'J:!
8 ~~
~0
~c
l(~ ~
Q.
" " §::l
0 :><: '" 0 '" ::;: u
I· Representation of
·1I. Representation of Sectorial .1
Nodal Information Set Member Information Set
(c) Representation of Nodal and Member Information
FIG. 2. String Representation Scheme
1332/ JOURNAL OF STRUCTURAL ENGINEERING / NOVEMBER 1998
J. Struct. Eng. 1998.124:1331-1338.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Nor
thea
ster
n U
niv
Lib
rary
on
06/2
9/13
. Cop
yrig
ht A
SCE
. For
per
sona
l use
onl
y; a
ll ri
ghts
res
erve
d.

INodal Infonnation SetI Member Infonnation Sets
Sector Sector Sector Sector Sector Sector Sector Sector I12345678
(b) Node and Member Information Representation and their Interpretation
FIG. 3. Example of String Representation and Structural Synthesis Schemes: Node and Sectorial Member Information Representation In Substrings and Their Interpretation
" *';j
" "tt :.e 'E -tt5'S "010 ~ 8 8 ~o~ 0
"8z~ ~ ~ ~~! ]~ ~~zoo>
Raw Value: 6 64 204 188 5 236Normalized Value: ON 5.02 8.00 188 ON 25
Substring 7(Node 5)
Substring 10(Node 3)
in a Sector
Member Infonnation Set
Substring 5(Node 2)
(a) Structure of a Substring
Nodal Infonnation Set
Substring 8(Node 1)
numbered 1 through 10, each representing a potential node ina rectangular physical design space, 20 m wide by 10 m high.Three substrings, 5, 8, and 10, are specified to represent fixednodes located on the base of the physical design space; substrings 8 and 10 represent support nodes located at the comersand substring 5 represents loaded node located at the middle.The remaining 7 substrings represent variable nodes. Thestructure of substrings is shown in Fig. 3(a). Each substringcontains one nodal information set and 8 member informationsets; each member information set corresponds to a sectoraround the corresponding node [Fig.4(a)]. Fig. 3(b) shows details of nodal and member information sets, their structure,binary representation, raw transformed values, and final normalized values; each component of nodal and member information sets is shown represented by 8 binary bits.
The decoded nodal information in the substrings is shown
Information Redundancy
There are information redundancies built into the proposedstring representation scheme in various forms, one of whichis the ability of the nodes and members to switch themselveson or off. Since the nodes and members can switch themselvesoff when not needed, the useful information in them will beretained. If at a later stage it becomes advantageous to reactivate them, the information they had accumulated earlier willserve as the starting point. The inheritance of member properties from the dominant sectors represents another form ofinformation redundancy. The dominantfnondominant sectorscan switch places, activating a different member properties set.The encouraging results obtained attest to the beneficial effectsof information redundancy on evolution, as concluded in arecent study (Raich and Ghaboussi 1997).
Decoding Represented Information
The genes representing nodal coordinates, support type,member type, and connection type are first transformed to"raw" values through binary-to-integer transformation. Theyare then transformed to actual values by means of preassignedmappings between the possible raw values and the actual values. This procedure allows dealing with a physical designspace of an arbitrary shape. The sector priorities are obtainedthrough binary-to-integer transformation.
A node or a member is considered active if the proportionof the on/off bits containing "I" in the corresponding genesat least equals the threshold factors, f~n for nodes and f~ formembers. The threshold factors can be assigned a value between 0 and I, in order to control the proportion of nodes andmembers active in the initial population. The use of more thanone bits in the on/off genes allows the possibility of the crossover sites falling within these genes.
The genes representing fixed and partially fixed nodes arelocated at known fixed positions on all the strings. These nodesare assumed to be active and their fixed coordinates are assigned the specified values instead of the values encoded instrings. The fixed members are similarly treated.
All active nodes are connected to each other forming a fullyconnected structure. The members inherit their properties fromthe dominant sector. Some of the members may be inactive,depending upon the member active/inactive genes. The finalsynthesized structure comprises all the active nodes and activemembers.
If the generated structures are unstable or they contain freely"hanging" nodes or completely separated parts, these deficiencies are "eliminated" during evolution through selectionpressure alone. No special measures are taken for this purpose.
Structural Analysis Issues
The synthesized structure will be unstable when some of itscritical members are inactive, which obstructs its analysis. Toprevent the synthesized structure from becoming unstable, allinactive members are replaced by "null" members and retained in the structure. The null members are given negligiblysmall sectional properties, such that they have only negligibleimpact on the structural behavior. This is done only to facilitate structural analysis. The synthesized structure is consideredto consist only of active nodes and active members.
(a) Intermediate Structural Shape
(b) Final Structural Shape
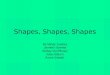
FIG. 4. Example of String Representation and Structural Synthe.l. Scheme.: Intermediate and Final Structural Shapu Synthesized from Information Represented In String
JOURNAL OF STRUCTURAL ENGINEERING / NOVEMBER 1998/1333
Example of String Representation and StructuralSynthesis
The string representation of a plane truss is used to illustratethe proposed string representation scheme and structural synthesis procedure. The string comprises 10 identical substrings,
Node 1 Node 2 Node 3
J. Struct. Eng. 1998.124:1331-1338.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Nor
thea
ster
n U
niv
Lib
rary
on
06/2
9/13
. Cop
yrig
ht A
SCE
. For
per
sona
l use
onl
y; a
ll ri
ghts
res
erve
d.

TABLE 2. Example of String Representation and StructuralSynthesis Schemes: Decoded Nodal Information Repre.entedIn Substrings
SUbstring Nodal on/off Structuralno. status x-coordinate }/'"coordinate node no.(1 ) (2) (3) (4) (5)
1 OFF 18.43 3.69 ·2 ON 5.02 8.00 43 OFF 11.29 9.10 - ·4 OFF 3.92 9.29 ·5 ON 9.04 0.48 26 OFF 8.47 2.31 - ·7 ON 15.06 8.00 58 OFF 0.64 0.32 19 OFF 4.08 7.61 -
10 ON 19.44 0.40 3
'Inactive (OFF) nodes do not exist In the synthesized structure.
in Table 2. Of the seven substrings representing variablenodes, only 2 and 7 are active (Le., "ON"). Of the threesubstrings representing fixed nodes, string 8 is inactive; because all fixed nodes must be present in the synthesized structure, this substring is treated as active. The specified coordinates of the fixed nodes are used instead of the valued encodedin the string.
The structure is synthesized from nodes represented by the5 active substrings. All such nodes are fully connected bymembers forming an intermediate structure [Fig. 4(a)]. Eachmember passes through two sectors, one at each end. Table 3lists all the members, the sectors through which they pass, andthe member information represented in those sectors. Themembers inherit member properties from the sector withhigher priority. For example, member 1-2 passes through sector 1 of substring 8 and sector 5 of substring 5; it inherits itsmember properties from sector 1 of substring 8 because it hasa higher priority (212) compared with sector 5 of substring 5,which has a lower priority (131). Based on member information represented in dominant sectors, some of the members areactive and others inactive. For example, member 1-2 is activebecause its dominant sector shows its status to be ON; member1-3 is inactive because its dominant sector shows its status tobe "OFF." Thus, only members 1-2, 1-4, 2-3, 2-4, 2-5, 3-5,and 4-5 are active and, therefore, present in the synthesizedstructure. The final synthesized structure is shown in Fig. 4(b).
Genetic Operators
The genetic operators used are selection, crossover, and mutation. The relative fitness based random selection scheme isused. A modified multiple-point crossover scheme is used inwhich, for each crossover operation, the number of crossover
sites is randomly determined between specified limits. Thecrossover operation is performed on all string pairs. This, together with the use of the multiple-point crossover, facilitatesa large amount of information exchange among members ofthe population before they are discarded due to selection pressure. This is especially useful in situations like the one addressed in which very long strings are expected (in the illustrative examples presented later, the strings were 25,200 bitslong). The standard mutation operator is used in which thebinary bits are flipped with a preassigned probability.
Penalty Functions
All penalty functions are expressed in the same generalform, as shown below.
(1)
where r;)t = penalty incurred by a structure for violating constraint k; v~ = a measure of violation of constraint k by component j of the structure (j refers to nodes for nodal constraintsand members for member constraints); Vt = a constant corresponding to constraint k, which has the same unit as v~; andNc• = number of components of the structure over which constraint k is applicable. The expression within parentheses is thepart of the penalty function that corresponds to component jof the structure; the penalty function consists of a number ofsuch parts, which are multiplied together to magnify their individual contributions. For those components that do not violate the constraint, vtJ equals zero, which reduces the expression within parentheses to 1. The constant, Vb is a referencevalue, which is assigned a value greater than the estimatedmaximum value of v~. This limits the value of the expressionwithin parentheses to a range between 1 and 2 in most cases;however, it is acceptable to have this value exceed 2. For allthe constraints except the stress constraint, the correspondingVt is kept constant. The penalty functions corresponding tovarious constraints differ from each other only in the definitionof the three penalty factors, v~, Vb and Nc.. They are shownin Table 4 for penalty functions corresponding to member constraints and in Table 5 for penalty functions corresponding tonodal constraints.
All null members subjected to a force exceeding a criticalvalue, Fen are assumed to be critical inactive members, whoseabsence would make the structure unstable. The structures arepenalized for such members. The applicability of member constraints to the active, critical inactive, and noncritical inactivemembers is shown in Table 6.
Since structures are synthesized only from the active nodes,
TABLE 3. Example of String Representation and Structural Synthesis Schemes: List of Members and Member Properties Represented at Their End Nodal Sectors
First End Node Second End Node
Member MemberSubstring Sector Sector on/off Section Substring Sector Sector on/off Section
Member no. no. priority status type no. no. priority status type(1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11 )
1-2 8 1 212 ON 27 5 5 131 ON 241-3 8 1 121 ON 22 10 5 197 OFF 241-4 8 2 98 OFF 23 2 6 203 ON 201-5 8 1 179 OFF 21 7 5 101 OFF 182-3 5 1 136 OFF 25 10 5 245 ON 272-4 5 3 184 ON 26 2 7 59 ON 272-5 5 2 235 ON 26 7 6 156 ON 243-4 10 4 132 OFF 22 2 8 188 OFF 253-5 10 3 185 ON 20 7 7 87 OFF 224-5 2 1 247 ON 19 7 5 129 ON 17
Note. See FIg. 4(a) for sector number through which member ends pass.
1334/ JOURNAL OF STRUCTURAL ENGINEERING / NOVEMBER 1998
J. Struct. Eng. 1998.124:1331-1338.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Nor
thea
ster
n U
niv
Lib
rary
on
06/2
9/13
. Cop
yrig
ht A
SCE
. For
per
sona
l use
onl
y; a
ll ri
ghts
res
erve
d.

TABLE 4 Penalty Factors for Member Constraints
Penalty Factors Conditionwhen
penalty Is
Constraint vkJ Vk Nco applicable(1) (2) (3) (4) (5)
StressDeficit weight 8wJ = wJ ({1'J - I)
Nil Number of members N., {1'JTotal weight of structure W = 2: wJ -> I
(1'.) J-1 (1'.)
Slenderness ratio Excess slenderness ratio 8sJ = (sJ - s.) Specified constant S~ for tension. and Number of members N., sJS~ for compression -> I
s.)Minimum length Deficit length 81} = (I., - IJ) Specified constant Le, Number of members N., IJ-< I
I.,Maximum length Excess length 8/] = (lJ - I.,) Specified constant Le, Number of members N., I,
-> II.,
Member symmetry Unbalanced area 8a, = (af - aj') Specified constant Ae Number of member pairs Npli a'...L;I< Ia"J
Note: The symbols used are defined as follows: wI' sJ. I, =weight, slenderness ratio, and length of member J; (1'" (1'.) =actual and allowable stress 10
member j; af. aJ =areas of symmetric member pair j; s.) = allowable slendeme~s ratio for ~ember j; I." I., = allowable ~nimum and m~imut.D lengthsfor members. Allowable stress for members in tension, {1'... {1';; and compressIOn, {1'.... (1'•• Allowable slenderness ratio for members 10 tension. s.) s;; and compression, s.) .. s~. Allowable stresses for compression members are deteniuned from buckling considerations.
TABLE 5 Penalty Factors for Nodal Constraints
Penalty Factors Conditionwhen penalty
Constraint vl9 Vk Nco Is applicable(1 ) (2) (3) (4) (5)
Critical displacement Critical limit on displacement D" Specified constant Dc Number of nodes NN djl->1Dcr
Noncritical displacement Excess displacement 8djl =(dJ, - d.,) Specified constant De Number of nodes NN d., < djl < DcrNodal symmetry [ N
L )'/2 Specified constant Ee Number of nodal pairs NpN eJ> 0Positional error 8eJ = 2: (xf, - x'J,)'
'.1Note: The symbols used are defined as follows: dJ( = displacement of node j 10 coordmate direction I; d., = allowable displacement for nodes m
coordinate directionj; NL =number of coordinate directions; xf" x'J, =coordinates I of symmetric nodal pair j.
TABLE 6. Applicability of Member Constraints
Active Inactive Member"
member (In Tension or Compression)
Member (in tension or Critical Noncriticalconstraint compression) members members
(1 ) (2) (3) (4)
Stress Yes Yes' NoSlenderness ratio Yes No NoMinimum length Yes Yes YesMaximum length Yes No NoMember symmetry Yes Yes Yes
"Inactive member is assumed to be critical if it carries a load greaterthan a critical limit, Fe~
'Critical inactive members always violate stress constraint.
only they are required to satisfy nodal constraints. The presence of critical inactive members will cause excessive displacements in at least some of the nodes in the structure. If aparticular nodal displacement exceeds a critical value, Den itis assumed to be due to the presence of a critical inactivemember in the structure and is penalized more severely. Thus,structures containing critical inactive members are penalizedtwice, by means of stress and displacement penalties.
If the physical design space and the loading pattern containplanes of symmetry, then symmetry constraints are included.To deal with the nodal symmetry constraint, the physical design space is reflected along a specified plane of symmetry.Each node forms a nodal pair with the node closest to itsreflection. Nodes close to the plane of symmetry form a nodalpair with themselves. Symmetry requires that all nodal pairs
overlap. The error in the overlap is the measure of the constraint violation. Only active nodes are considered for nodalconstraints. This procedure can be easily extended to threedimensional structures.
A similar procedure is used in the member symmetry constraint. All active and inactive members connecting activenodes are considered. Each member is assumed to form amember pair with a corresponding member in the structurereflected about the axis of symmetry. Each member forms amember pair with the member connecting the nodal pairs ofits end nodes. In special cases, members may form a memberpair with themselves. The constituent members of each pairshould have equal cross-sectional properties. Their differenceis the measure of the constraint violation by each member pair.
Fitness Function
For each structure, the total cost function, CT, is calculated
from the objective function and the weighted penalty functions
(2)
where C = objective function expressed as the cost functionthat needs to be minimized; r;; t = penalty incurred by the structure for violating constraint k; Nt =number of constraints; andat = exponential penalty weight factor for constraint k. Thecost function and the weighted penalty functions are multipliedtogether to magnify their individual contributions. Unlike theobjective function that can be exactly evaluated, the penaltyfunctions are highly empirical and. as such, do not have "correct'· answers. Contributions from the penalty functions with
JOURNAL OF STRUCTURAL ENGINEERING / NOVEMBER 1998/1335
J. Struct. Eng. 1998.124:1331-1338.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Nor
thea
ster
n U
niv
Lib
rary
on
06/2
9/13
. Cop
yrig
ht A
SCE
. For
per
sona
l use
onl
y; a
ll ri
ghts
res
erve
d.

(3)
respect to each other, as well as with respect to the objectivefunction, need to be manipulated in order to strike a reasonablebalance that would lead to evolution of fitter individuals; thisis facilitated by the form of the total cost function. The structures that violate constraints are allowed a reasonable chancefor propagating their genes into the next generation, dependingupon their degree of constraint violations. This helps to preserve genetic diversity in the population. To be acceptable,however, the evolved structures must satisfy all design constraints.
The total cost function [(2)] is transformed to the raw fitnessfunction using an inverse transformation.
I' - c?:..x- CT
where I' = raw fitness; C = total cost of structure; and C~ax= total cost of the worst structure in the current generation.With this transformation, the raw fitness of the worst structureequals 1.
To maintain proper selection pressure, the fitness distribution is regulated by defining a scaled fitness by means of thelinear transformation
1= (Ce - 1) /' I' + (f:...x - Ccf~vg) /' (4)if:n.x - f~V8) avg (j:n.". - f~V8) IV'
where I = scaled fitness; f' = raw fitness of structure; I~vg =average raw fitness; I:"'ax = maximum raw fitness; and Ce =fitness scaling factor. This transformation is based on two criteria: (1) the average scaled fitness should be equal to theaverage raw fitness; and (2) the maximum scaled fitness shouldbe equal to Ce times the average raw fitness.
With this transformation the best structure has a chance ofcontributing Ce copies to the next generation during reproduction. When Ce equals a critical fitness scaling factor
(5)
where 1:"'1n, I:"'ax, I~vg = minimum, maximum, and average rawfitness values, the scaled fitness of the worst individual willbe zero. When Ce > CerJ some of the worst individuals willhave negative scaled fitness values, which is not allowed. Toensure that the worst scaled fitness value is always greater thanzero, the following restriction is applied on Ce : for any generation, if Ce > (Cel - 8Ce ), replace Ce by (Cel - 8Ce ), where8Ce is a small positive number, for example, 0.1, which hasbeen introduced to factor in the effect of numerical roundingoff.
ILLUSTRATIVE EXAMPLES
To demonstrate the potential of the proposed methodology,two illustrative examples are presented. They involve evolution of minimum weight optimum shapes for simply supportedplane truss structures, spanning 70 m (....230 ft) each, as shownin Fig. 5, subject to the constraints listed earlier (see ProblemDescription and Formulation). For both examples, 70-m-Iongrectangular physical design spaces are specified. The designspecifications for the two examples are identical, differing onlyin the height of the rectangular physical design space: 35 m(-115 ft) for Example 1 and 10 m (-33 ft) for Example 2.The positions of two support nodes and six loaded nodes, represented by solid circles in Fig. 5, are fixed. The structurescan contain any number of free nodes and any number ofmembers. The structural members are specified to be truss elements. The members are selected from a set consisting of 27standard AISC sections (Manual 1989), W 14 X 22 throughW 14 X 426. The material properties are those of steel (E = 2.01
1336/ JOURNAL OF STRUCTURAL ENGINEERING / NOVEMBER 1998
~h-
! ! ! ! ! ! .J~p p p p p p
p =SOO kN (112.40 kips)
7 spans @ 10 m (32.81 ft) = 70 m (229.66 ft)
L
FIG. 5. Example of Physical Design Space, Boundary Conditions, and Loading Used In Examples: H == 35 m (114.83 ft) forExample 1 and H = 10m (32.81 ft) for Example 2
X 1O~ MPa,!, = 248.8 MPa, p = 7.85103 kg/m3). The relevant
AISC design specifications (Manual 1989) are followed.The specified allowable values are: (J'~ = 0.6!,; s~ = 300;
s; = 200; I., = 5 m (.... 16 ft); 1.1
= 35 m (-115 ft); and d., =70 mm (-0.2 ft) in both coordinate directions. The allowablecompression stress, (J'~' is determined from buckling considerations, using the relevant parts of the AISC code (Manual1989). The limits on member lengths are specified in order tosimulate commercially available member lengths. The displacements are limited to (l/I,OOO)th of span, in accordancewith relevant AASHTO specification (Standard 1989).
The same string representation scheme is used for the twocases. The nodal information set is composed of (1) on/offswitch; (2) x-coordinate; and (3) y-coordinate. The sectorialmember information set is composed of (1) on/off switch; (2)sector priority; and (3) member type. All six quantities arerepresented by 10 bits each. With the reasonable assumptionthat the optimum shapes for the specified structures can nevercontain more than 40 nodes, including the fixed nodes, eachstring representing an individual structure is composed of 40substrings, representing 40 nodes. The space around each nodeis discretized into 20 equal sectors. The total length of thestring representing an individual structure adds up to 40 X (30+ 20 X 30) = 25,200 bits. The threshold factors, I~n andI~, are set to 0.5 each.
To demonstrate the robustness of the proposed methodology, solutions to both examples are evolved using identicalsets of GA parameters, penalty factors, and simulation parameters. The population size is limited to 100. The mutation probability is fixed at 0.002. All member pairs are crossed; that is,the crossover probability is fixed at 1.0. The modified multiple-point crossover is used in which, for each crossover operation, the number of crossover sites is randomly selectedbetween 2 and 10.
The objective function C is taken as the weight of the structure. The penalty factors used are: S:; = 1,000; S; =500; L e , =Le1 = 30 m; Ae = 1 m2
; Dc = 1.5 m; and Ee = 30 m. The criticalload and critical displacement used are: Fel = 5 kN (-I kips);and Del = 1.5 m (5 ft). The fitness scaling factors used are: Ce
= 2.5 and 8Ce = 0.1. The exponential penalty weight factors,al, used for stress, slenderness ratio, minimum length, maximum length, member symmetry, nodal displacement, andnodal symmetry are 2.0, 3.5, 2.0, 2.5, 3.0, 3.5, and 2.0, respectively.
Both examples are evolved through 10,000 generations. Thebest-of-generation cost profiles during evolution are shown inFigs. 6 and 7. The structures undergo series of shape transi-
J. Struct. Eng. 1998.124:1331-1338.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Nor
thea
ster
n U
niv
Lib
rary
on
06/2
9/13
. Cop
yrig
ht A
SCE
. For
per
sona
l use
onl
y; a
ll ri
ghts
res
erve
d.

FIG. 6. Best-of-Generatlon Cost Profile for Example 1
FIG. 7. Best-of Generation Cost Profile for Example 2
tions during evolution. Tl:e shapes acquired at some typicalpoints during evolution are shown in Figs. 8 and 9. The bestshape for Example 1 is evolved after 5,400 generations, andhas a total weight of 73,937 kg (163 kips). For Example 2,the best shape is evolved after 9,754 generations, and has atotal weight of 60,329 kg (133 kips). The analyses of theseshapes show that they satisfy the specified constraints well.Both final shapes are statically determinate, which is expected.
The two final shapes have two important differences. Thebest shape for Example 1 has greater height and containslonger compression members (top chords) compared with thebest shape for Example 2. These differences are due to therestriction imposed by the shallower height of the physicaldesign space for Example 2. A structure with small height isless efficient, and so the top and bottom chord members aresubjected to greater axial loads. Because of buckling behavior,beyond certain length, shorter compression members are moreefficient. Therefore, the best shape for Example 2 has shortercompression members.
The best-of-generation cost profiles show three distinctphases of evolution. During the first phase, which is characterized by extreme oscillations in the cost profile, different"basic" structural designs are explored for the potential forimprovements. When a potentially promising basic structuraldesign is discovered, the second phase begins, which is characterized by a steep drop in the cost profile, and is terminatedby an abrupt flattening out at the base. Initially, at the beginning of the second phase, the selected design contains a number of redundant nodes and members, the nodes are somewhat
I
,t IW~ ~, li"~l~ r ~ \ m, nt t_ \e!l-
~Ic-~]- ]=
~-
~--~ib-J
f---
~ 1-~
L
~l!l
]~1-", tI
~1-] ~ ij ~ ~'" JI- j] j l
100
0 1000 2000 3000 4000 SOOO 6000 7000 8000 9000 ooסס1Generation
108
'ii 107
'&1
1 10-
I10'
10'
],103
~ 10'
~ 101
~ 107
.~
1 10-
.. 10'
i 10'
! 103
~ 10'
~ 10'
100o 1000 2000 3000 4000 SOOO 6000 7000 8000 9000 ooסס1
Generation
Generation = 118
Generation = 1341 Generation = 2489
Generation = 3629 Generation = 4053
Generation = 4313 Generation = 5400
FIG. 8. History of Evolved Shapes for Example 1, Fittest Member In Each Generation
JOURNAL OF STRUCTURAL ENGINEERING / NOVEMBER 1998/1337
J. Struct. Eng. 1998.124:1331-1338.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Nor
thea
ster
n U
niv
Lib
rary
on
06/2
9/13
. Cop
yrig
ht A
SCE
. For
per
sona
l use
onl
y; a
ll ri
ghts
res
erve
d.

Generation = 1 Generation = 125
]Generation = 626 Generation = 1009
['---~----=~~=----II~~Generation =1487 Generation =2038
I/1<:Dd~ l/1<M~Generation = 4396 Generation = 9754
~---=:::::5<1~\)Z;::=;:::2i'J [/f(;~s~Z\==Z:::;::::\~~1FIG. 9. History of Evolved Shapes for Example 2, Fittest Member In Each Generation
misaligned and some of the members are too small or toolarge. As the second phase progresses, the GA quickly gets ridof most of the redundant nodes and members, nodes are moreproperly positioned, and the members have more appropriatesizes. During the final stage, which begins where the cost profile flattens out, a gradual improvement in the structural designtakes place. All redundant nodes and members are removed.During this phase, in addition to the reduction in weight, theemphasis is mainly on satisfying constraints. Although thisevolutionary process may be continued for many more generations, only minor improvements are expected by means of"fine tuning" of the design; the basic structural design is expected to remain unaltered.
CONCLUDING REMARKS
In this paper, a method for using a GA in the truly unstructured design problem of evolving optimal structural shapes hasbeen developed. With the proposed method, it has been demonstrated that the GA can be used to simultaneously determinethe shape of the structure while it is being optimized.
The underlying GA used in the proposed method is alreadywell established and it has been used by many researchers.The main contribution of the proposed method is developinga representation scheme for encoding of the structural shapedesign and a method for evaluation of fitness of the individualstructures. The proposed methodology requires much longerstrings than most structured design problems. This is due tothe complexity of shape design problem.
The proposed methodology has been demonstrated on twosimple examples of single-span plane trusses. The evolvedshapes for these structures are in agreement with the generalengineering practice that has evolved through experience. Because the proposed method is not constrained by the engineering experience, it has the potential of evolving innovativestructural shapes when applied to more complex design problems.
APPEN~X REFERENCESDobbs, M. W., and Felton, L. P. (1969). "Optimization of truss geome
try." J. Struct. Engrg., ASCE, 95(10), 2105-2118.Dorn, W. S., Gomory, R. E., and Greenberg, H. J. (1964). "Automatic
design of optimal structures." Journal de Mecanique, Paris, France,3(1), 25-52.
1338/ JOURNAL OF STRUCTURAL ENGINEERING / NOVEMBER 1998
Galante, M. (1996). "Genetic algorithms as an approach to optimize realworld trusses." Int. J. Numer. Methods Engrg., 39, 361-382.
Goldberg, D. E. (1989). Genetic algorithms in search. optimiwtion &machine learning. Addison-Wesley Publishing Co., Reading, Mass.
Goldberg, D. E., and Samtani, M. P. (1986). "Engineering optimizationvia genetic algorithm," Proc., 9th Conf. on Electronic Computation,ASCE Struct. Div., New York, 471-482.
Hajela, P., Lee, E., and Lin, C.-Y. (1993). "Genetic algorithms in structural topology optimization." Topology design of structures, M. P.BendSl1le and C. A. M. Soares, eds., Kluwer Academic Publishers, Dordrecht, The Netherlands, 117-133.
HolIand, J. H. (1975). Adaptation in natural and artifU:ial systems. University of Michigan Press, Ann Arbor, Mich.
Kirsch, U. (1989). "Optimal topologies of structures." Appl. Mech. Rev.,ASME, 42(8), 223-239.
Manual ofSteel Construction, 9th ed. (1989). American Institute of SteelConstruction (AISC), Inc., Chicago, Ill.
MichelI, A. G. M. (1904). "The limits of economy of materials in framestructures." Philosophical Mag., London, Series 6, 8(47), 589-597.
Ohsaki, M. (1995). "Genetic algorithm for topology optimization oftrusses." Comput. Struct., Great Britain, 57(2), 219-225.
Raich, A. M., and Ghaboussi, J. (1997). "Implicit representation in genetic algorithms using redundancy." Evolutionary Computation, MITPress, Cambridge, Mass., 5(3), 277-302.
Rajan, S. D. (1995). "Sizing, shape, and topology design optimization oftrusses using genetic algorithms." J. Struct. Engrg., ASCE, 121(10),1480-1487.
Rajeev, S., and Krishnamoorthy, C. S. (1992). "Discrete optimization ofstructures using genetic algorithms." J. Struct. Engrg., ASCE, 118(5),1233-1250.
Standard Specifications for Highway Bridges, 14th ed. (1989). AmericanAssociation of State Highway and Transportation Officials (AASHTO),Washington, D.C.
Topping, B. H. V. (1983). "Shape optimization of skeletal structures: Areview." J. Struct. Engrg., ASCE, 109(8), 1933-1952.
Topping, B. H. V. (1993). "Topology design of discrete structures."Topology design of structures, M. P. BendSf/le and C. A. M. Soares,eds., Kluwer Academic Publishers, Dordrecht, The Netherlands, 517534.
Vanderplaats, G. N. (1984). "Numerical methods for shape optimization:an assessment of the state of the art." New directions in optimumstructural design, E. Atrek, R. H. Gallagher, K. M. RagsdelI, and O.C. Zienkiewicz, eds., John Wiley & Sons Inc., New York, 89-103.
Wu, S.-J., and Chow, P.-T. (1995a). "Integrated discrete and configurationoptimization of trusses using genetic algorithms." Comput. Struct.,Great Britain, 55(4), 695-702.
Wu, S.-J., and Chow, P.-T. (1995b). "Steady-state genetic algorithms fordiscrete optimization of trusses." Comput. Struct., Great Britain, 56(6),979-991.
J. Struct. Eng. 1998.124:1331-1338.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Nor
thea
ster
n U
niv
Lib
rary
on
06/2
9/13
. Cop
yrig
ht A
SCE
. For
per
sona
l use
onl
y; a
ll ri
ghts
res
erve
d.