Embed Size (px)
Citation preview

Evolutionary Adaptive Discovery of Phased Array Sensor SignalIdentification
Timothy R. McJunkin and Milos Manic
Abstract— Tomography, used to create images of the internalproperties and features of an object, from phased array ultason-ics is improved through many sophisiticated methonds of postprocessing of data. One approach used to improve tomographicresults is to prescribe the collection of more data, from differentpoints of few so that data fusion might have a richer data set towork from. This approach can lead to rapid increase in the dataneeded to be stored and processed. It also does not necessarilylead to have the needed data. This article describes a novelapproach to utilizing the data aquired as a basis for adaptingthe sensors focusing parameters to locate more precisely thefeatures in the material: specifically, two evolutionary methodsof autofocusing on a returned signal are coupled with thederivations of the forumulas for spatially locating the featureare given. Test results of the two novel methods of evolutionarybased focusing (EBF) illustrate the improved signal strengthand correction of the position of feature using the optimizedfocal timing parameters, called Focused Delay Identification(FoDI).
I. INTRODUCTION
Sensors are often thought of as statically configured de-vices, with the goal of gathering as much information fromas many directions as possible with processing, reductionand interpretation left as a post processing task. With somehighly configurable sensors, adaptive reconfiguration wouldbe a power tools. Similar to the eye in advanced livingorganisms a phased array ultrasonic system can adjust gains,steer, focus, and, ultimately, be physically moved through lo-camotion to produce a better point of view and better analysisof the subject of interest. This paper presents an architectureand first steps to utilizing the phased array system in a wayto more fully utilize the power of reconfiguration to solveambiguities and arrive at more precise tomography providingbetter interface for human interaction.
Sound has long been used as a means to make measure-ment of our surroundings. Measuring the time of propagationof sound yields information about the proximity of objectsemanating or reflecting sound. The applications range frommapping of objects in air and water to detailed examinationof human tissues as a medical diagnostic technique. In themedical and industrial applications, the frequency of theacoustic waves used is typically well above the range of
Work was supported by the U.S. Department of Energy through the INLLaboratory Directed Research and Development (LDRD) Program underDOE Idaho Operations Office Contract DE-AC07-05ID1417
T. McJunkin is with the Industrial Technlogy Deptartmet, Idaho Na-tional Laboratory, P.O. Box 1625 , Idaho Falls ID 83415-2210, [email protected]
M. Manic is with the Department of Computer Science, University ofIdaho, 1776 Science Center Drive, Ste.303 Idaho Falls, ID 83402, [email protected]
human hearing and is referred to as ultrasound. In a time offlight use of ultrasonics, a material such as a piezoelectriccrystal is excited with a sharp pulse of electricity thatcauses a mechanical deformation. The mechanical energyis transferred into mechanical vibrations in a material andpropagates through the material. Gases and liquids typicallysupport a longitudinal compression and propagation only,where as solids may support transverse (also known as shearwave) oscillations and propagation. The sound propagatesaccording to the physical properties of the material whichdetermine the velocity of propagation and attenuation ofthe waves. The size and shape of the crystal determinethe pressure profile. Studied as a wave energy, sound mayreflect, refract or diffract to alter the path and mode ofpropagation when the sound approaches an area where thematerials properties change (e.g. a discontinuity such as avoid in a metal or hard tissue in a biological specimen).The examination of the energy returned to the crystal, whichwill be referred to commonly as an ultrasonic transducer orsimply “transducer”, gives a large amount of informationabout internal structures in a nondestructive manner. Thedirection of the sound can be assumed and when the speedof sound propagation is known, a distance measurementcan determine the location of the reflection. Of course, thepropagation direction of sound is not bounded to a vector.The path that the sound took in exact terms is not known. Itmay be slightly off angle or the result of beam spread or sidelobes. This may cause the amplitude versus time informationto be misinterpreted. In a solid both shear and longitudinalwaves coexist traveling at different speeds, posing a potentialfor a large misrepresentation of a signals location.
To produce better imaging by “focusing” sound in thenear field of ultrasonic transmission, phased array ultrasonics(PAU) has been developed and applied to medical and indus-trial applications. With this technology, the propagation ofsound can be controlled to a great extent by steering, focus-ing at various depths, and scanning by electronically movingthe aperture selected. This technology, summarized in thenext subsection, has been exploited to provide extraordinaryimagining and subsequent rendering to interpret the data as arealistic three dimensional view of organs or fetuses in utero.Much research has been done to produce better imaging fromdata collected. One solution is to collect even more dataand apply sophisticated data fusion [1] and interpretationalgorithms. For example linear classifiers with wavelets havebeen applied to make additional inference from data sets[2]. Modeling of the fields produced by phased arrays [3],provides possible amelioration of problems associated with

grating lobe or side lobes through better design; however, thespread of sound to all connected material still presents issuesin interpretation of data. Portzgen used wave equation basedto predict artifacts created in images from alternate paths thatallows removal of artifacts that match the predicted pattern[4]. Some novel litterally flexible approaches have been taken[5].
A very comprehensive way of collecting data is describedby Holmes in [6], [7], [8], whereby an attempt to collectall available information from a set of array elements iscompleted by individually exciting each element and record-ing the time series response from all of the elements. Inthis way, reconstruction of any combination of transmit andreceive elements can be post processed with arbitrary delaysfor examination. Methods for attempting correction due tovariation in sound velocity have been developed [9], againfrom post processing of data. The method may put an undoburden on the amount of data collected. Also, these papers donot account for multiple modes of propagation possible. Thepresent research describes another tool and a paradigm thatwill allow the sensor to overcome some basic interpretationproblems and advance the full data acquisition interpretationas well as utilize more typical commercial instruments.
This paper is organized into logical sections. SectionII. provides the reader with background on phased arrayultrasonics and Section presents background on PAU andthe concept of using it as an adaptive sensor. The novel wayof indentifying the exact origin of a ultrasonic signal usingphased array as an adaptive sensor using evolutionary basedfocusing and focused delay indentification is discussed inSection III. Section IV. presents the system setup to performexperiments on physical stainless steel blocks and the resultsof those experiments. Conclussion and futures direction ofthis method are finally given in Section V.
II. BACKGROUNDA. Phased Array Ultrasonic Tomography
A crystal can be caused to expand by applying a voltage.Conversely when a force is put on the crystal it will gener-ate electrical energy which can be measured as a voltage.Ultrasonics utilizes the conversion of electrical energy tomechanical energy and the inverse to transmit and receivemechanical waves into a test subject. For a contiguous crystalthe characteristics of the transmitted sound are determinedby the size and shape of the crystal or aperture and thecharacteristics are fixed. For example a small aperture willlook much like a point source where the sound waves willspread out in a spherical shape; visualize the ripples whena small pebble is thrown into a pond. Over time the ripplemoves out at greater radii. A more complicated and veryflexible and powerful configuration of many “point” sourcesis PAU.
In PAU, the impulse to each element is timed to point thebeam in a specific direction and focus it at a particular depth.By steering the beam through a sequence of angles an imagecan be formed. The example in Fig. 1 shows an image takenfrom a scan of an aluminum plate that has been friction stir
Fig. 1. Amplitude versus time signals (A-scan) shown on the right arecollected at a range of angles and displayed in a typical sector scan image.Arrows show where peaks in the A-scan are displayed on the image.
welded [10]. A delay pattern, called a focal law, to generatea sound path in a particular direction has been calculatedfor each angle. The acquired signal for each is in the formof the signal on the right. Coding the amplitude with colorand rendering the time amplitude signal, referred to as an A-scan, at the appropriate angle the image is displayed. Thereare obvious reflectors represented in the image. There arealso numerous lower amplitude signals shown through outthe image. These are items may be real and in the locationshown or may be shadows of the large items. The methods inthis paper provide an important tool to resolve that question.
B. Multiple Propagation Modes
There are numerous sounds paths that may reflect off areflector. Fig. 2. illustrates four possible pulse echo (PE)paths that will provide a paths that focus on the same pointfrom the same set aperture on the array. In this illustrationthe transducer is on a angled wedge that allows sound topropagate at a nominal angle. Note that Fig. 2 A and Bhave similar paths, but have a strikingly different focal lawshown on the right. Observing, the signals illustrated inFig. 3 show the timing of these possible sound paths. Theimportant aspect of this illustration to the current work isthat there is no way to know if a signal returned comesfrom a reflector that is close propagating as a shear wave oris farther away propagating as a longitudinal wave, whichtravels much faster. However, if the object is in “focus” theshape of the focal law yields the answer.
C. Adaptive Sensor Architecture
A typical PAU system connects transducer elements toboth a transmit and receive multiplexer. The transmit channelcontains pulsers, which produce a voltage pulse, drivenby a programmable delay generator. The receive side hasamplifiers then a signal delay block followed by a summationblock and a digitizer. Note: digitizers could be placed afterthe initial amplification and the delays and summation donedigitally. Behind that are registers containing the set ofconfiguration parameters which are designed to be cycledthrough as fast as possible so that one cycle through all of the

30.0
-30.0
-20.0
-10.0
0.0
10.0
20.0
45.0-80.0 -50.0 -25.0 0.0 25.0
30.0
-30.0
-20.0
-10.0
0.0
10.0
20.0
45.0-80.0 -50.0 -25.0 0.0 25.0
30.0
-30.0
-20.0
-10.0
0.0
10.0
20.0
45.0-80.0 -50.0 -25.0 0.0 25.0
30.0
-30.0
-20.0
-10.0
0.0
10.0
20.0
45.0-80.0 -50.0 -25.0 0.0 25.0
Del
ay (u
S)
2.0
0.0
0.5
1.0
1.5
Element#310 5 10 15 20 25
Tim
eDiff
(uS)
2.0
0.0
0.5
1.0
1.5
Element#310 5 10 15 20 25
Tim
eDiff
(uS)
2.0
0.0
0.5
1.0
1.5
Element#310 5 10 15 20 25
Tim
eDiff
(uS)
2.0
0.0
0.5
1.0
1.5
Element#310 5 10 15 20 25
A)
B)
C)
D)
Fig. 2. Four sets of possible sound paths to a given target. A) is a focusfor a shear wave on a direct path, B) for a longitudinal wave on a directpath, C) for a shear from a reflection from the bottom of the part shown,and D) a longitudinal from a reflection. Delays on the right show necessarydelay patterns to achieve focus on the path.
B)D)
A)
C)
10 20 30 40 50
Fig. 3. An illustration of what the A-scan (i.e. amplitude versus time of thereceived signal) for the energy returned from the four paths shown in Fig 2.All four paths shown and others may produce signal of varying amplitudesdepending on where the timing has focused the sound.
patterns can occur as close as possible to the same time. Thisis important when the transducer is either being moved bymanual or automatic methods, so that the cross-sections aresampled at the same physical scan location. For this purpose,the architecture does not need to be optimized for reloadingthe configuration. The algorithms described in this paperare therefore not practical without redesign of hardware toperhaps implement the algorithms tightly integrated with thehardware. However slowly it was performed currently, thenecessary architecture change to allow the data to drive theconfiguration of the sensor with similarity to a biologicalsystem is shown in Fig. 4. Existing systems described in the
Experimental Setup section can be used to implement theshown architecture but at a low level of performance.
III. SIGNAL INDENTIFYING ALGORITHMS
In this section, two algorithms for beam focusing usingevolutionary algorithms to adapt the focal law delays. Oneadjust each phased array individual element delasy withan independent random perturbation. The second randomlychanges the physical parameters of sound speed and focusposition. Both use amplitude of a signal of interest as thefitness measure.
A. Evolutionary Based Focusing
Two methods of evolutionary Based Focusing (EBF) basedon randomly perturbing the delays for the focal laws aredefined here. The first is completely unstructured in the sensethat the expected shape of the curve formed in the delaysfor focusing at a particular point is neglected. The secondstarts with the standard form for calculating the delays forproducing simultaneous arrival of the wave fronts at a desiredpoint with a known sound speed. In both, the focusing ofthe phased array focal law delays on a signal of interest(SOI) is completed in an iterative self organizing manner ofperturbing the delays randomly and measuring the fitness ofthe focus through the amplitude, measured as the differencebetween the absolute maximum and minimum of the SOIwithin the signal window. A window length was chosenbased on observation to be 50 samples. Other measures offitness are possible including the decrease in amplitude ofother peaks or metrics on the shape of the SOI.
To account for possible variation in coupling due to smallvibrations or drying of couplant over the potentially longperiods of the experiments, the system was setup with twofocal law channels, one with the current best configurationand the other with the altered configuration. The two caseswould be activated within milliseconds of each to each otherso the comparison would exclude anything that could be timevarying. The rate at which trials could be performed was rela-tively slow, due to the latency to reconfigure the hardware. Assuggested in the architecture section for adaptive algorithmsto be put in commercial use, the hardware architecture wouldalso have to evolve to allow those updates to occur faster. Theevolutionary process is also slow requiring many iterationsthat did not improve fitness. Although the transmit andreceive delays and the apertures used can be unique, thispaper is limited to pulse echo where the send and receivedelays are the same, leaving analysis for the more arbitrarycase to future papers.
1) Individual Element Delays: The set of delays, td areassociated with a linear array element position. Each delay,td[i] is combined with the transducer element location p[i],which in a linear array positioned horizontally on the partunder test (PUT) is the horizontal displacement from thefirst element. The element position is then px[i] = ∆xi,where ∆x is the spacing, or pitch, between the center oftwo sequential elements. The configuration controlling thesound propagation is then determined by the ordered pairs

Motion/Locamotion
ActAdjust Perspective through motionVolumetric ImagingImaging plan.
Pulser
TransmitMultiplexer
ReceiveDelay
ReceiveDelay
ReceiveDelay
TransmitDelay
ChooseElements(Aperture)
PulserTransmitDelay
PulserTransmitDelay
Amp
Amp
ReceiveMultiplexer
ChooseElements(Aperture)
Amp
Amp
Digitizer
ConfigurableActive Illumination
ConfigurableReception
Linear ArrayTransducer
ImagingAgregateSignals
Sensor Controls/ConfigurationVisualizeInterpretAdapt
SensorSignal
Fig. 4. A modified architecture allows algorithms to react to the data collected and extract more detailed information in area that are determined to beof interest and an physical interaction where either system or human operator repositions the sensor based on cues from the data.
of (td[i], px[i]). For the purpose of this paper the positionswill be held constant for a given experiment but with eitherlocomotion of the transducer or by changing the choiceof element this could be utilized in the adaptations. Themutations of the evolutionary algorithm are implementedby randomly choosing a change to the delay. A maximumchange is selected ∆td and a set of random numbers foreach element between 0 and 1, r[i, n]. A new set of delaysis found This is found for i = 1...N with
temp[i] = td[i, n] + r[i, n]∆td (1)tdm[i] = temp[i]− min
j=1...Ntemp[i]. (2)
, Now each set is executed. If the result of the mutationprovides greater fitness, the successful generation counter,n, is incremented and the current most optimal set of delaysbecomes td[i, n + 1] = tdm[i]. Otherwise, the mutationsare discarded. This process repeats until the fitness ceasesto improve significantly. The stopping point for the currentpaper was arbitrary.
2) Physical Parameters: This method requires the a prioriknowledge about the timing of energy propagation from thephased array elements. The form of the focal law delaysgiven known focal point location, the sound speed and thetransducer pitch is derived here, producing the expressionof which a small number of parameters can be perturbed tocreate the mutations instead of each delay.
The concepts described here have been applied to theflexible and powerful technology of PAU. A PAU ultrasonictransducer is divided into numerous small piezoelectric-electric transducers each with its own electrical connection.
The electronics connected to this transducer is designed totightly control timing of the pulses that excite each of theseelements precisely. At the first order of approximating, theindividual elements are point sources for emitting mechanicalforce which is used to put a impulse into the subject beingexamined causing an acoustic wave to be propagated.Thepurpose in controlling and receiving point sources in concertis to guide the sound along the entended line of travel andto “focus” at a desired depth or location. The desired pointof focus is achieved by producing constructive interferenceof the waves from each of the point sources with controlof timing delays. With the known relative position of theelements and the speed of sound propagation in the materiala delay for the exciting impulse to each element can be calcu-lated for an arbitrary location in proximity to the transducer.Energy that returns to the transducer is again transformedfrom an acoustic wave to a mechanical deformation of thepiezoelectric electric crystal, finally producing an electricalsignal that can be digitized. A configuration of a linear PAUtransducer is illustrated in Fig. 5, where an array is placedin direct contact with the subject material. Using Fig. 5, thebasic concept can be expressed by considering the path ofa wave front propagating from each of the elements used inthe aperture along the red lines to a point in which focus isdesired (i.e. the intersection of the lines shown).
The expression for the distance of sound propagationfor each individual element to or from a point location isdescribed simply as
d[i] =√
(X − i∆x)2 + Y 2 (3)

Y
X
Δx
Tim
e(uS
)3.0
0.0
1.0
2.0
Element Number90 1 2 3 4 5 6 7 8
Fig. 5. Example showing a linear phased array transducer placed directlyon of the sound paths from the individual elements of the transducer tothe desired focal point shown with the necessary delays to each element toallow the propagating wave fronts to arrive simultaneously at that point.
d[i]2 = (X − i∆x)2 + Y 2 (4)= X2 + Y 2 − 2i∆xX + i∆x2 (5)
where X and Y are the relative Cartesian positions of thefocal point with respect to the location of the 0th element ofthe transducer, ∆x is the spacing of the transducer elementsin the direction of X and i is the element number countingfrom 0 to N−1. This expression must be expressed in time toarrive at the necessary delays to produce the focusing affect.With a known sound speed, ν, time of flight to and from theelements to the focal point is
t[i] = d[i]/ν (6)
t[i] =
√(X − i∆x)2 + Y 2
ν(7)
t[i]2 = c+ bi+ ai2 (8)where
a =(
∆xν
)2
(9)
b = −2X∆xν2
(10)
c =X2 + Y 2
ν2(11)
.The necessary delays to focus as in Fig. 5 are found by
identifying the maximum time of flight and subtracting thetime of flight for each element such that the longest pathpulse is triggered at t = 0 and each of the other elementsare triggered subsequently by the calculated delay, as such:
td[i] = maxj=0...N−1
t[j]− t[i]. (12)
The mutations could be performed by perturbing graduallythe constants a, bandc. Though, for the current experimentsthe choice of altering the parameters with physical mean-ing (X , Y , and ν) was made. As with the individualdelays a random variable is produced for each parameter,rX [n], rY [n], andrν [n] to adjust the next mutations as
Xm = ∆X(rX [n]− 0.5) +X[n] (13)Ym = ∆Y (rX [n]− 0.5) + Y [n] (14)νm = ∆ν(rX [n]− 0.5) + ν[n]. (15)
Using equation (8), the time of propagation for each ele-ment is determined. The final delays are found by applying(12). The focal laws are executed. If the fitness functionis improved then the new parameters are maintained asX[n+ 1] = Xm, Y [n+ 1] = Ym, and ν[n+ 1] = νm.
B. Focused Delay Indentification
Upon arriving at the focus point, through the iterativemeans described previously, the standard equation can beused in reverse by solving for the parameters of the stan-dard point reflector form. The accronym for focused delayindentification is FoDI. The delay laws td[i] must be addedto the time of flight, tf , to the start of the pulse to find theflight times t[i] for the sound to and from the target thathas been focused upon. Although the time of the peak orthe time of the start of the window might be an acceptablechoice for time of flight, a more accurate determination ofthe start of the packet should be determined. A matchedfilter tuned to the frequency of the ultrasound combinedwith a heuristic algorithm for following the sync functionback to the start was used to find tf . The matched filteris a three point matched filter spaced at half cycles of thecenter frequency of the transducer. The point of maximumcorrelation is associated with the peak of the three half cyclescontaining the peak. Repeatedly, moving earlier in time inthe correlation to the next local maximum in the selectionwindow until the next local maximum is not greater than20% of the previous one. The time associated with the finalacceptable local maximum is thus tf .
The time of flight is that for the round trip of the sound. Sothe transit time from or to the target to each of the elementsis
t[i] = tf/2 + td[i] (16)
. With numerous elements the solution of the three unknownconstants (a, b, and c) can be solved in a least squaresmanner. The means squared error of the least squares solutionmay serve as a possible measure of the convergence.
The solution for the constants can be converted throughsolving the expressions (9), (10), and (11) for the physicalparameters:
ν =√a/∆x (17)
X = bν2/2∆x (18)
Y =√cν2 −X2. (19)

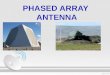
Fig. 6. Photo graph of a sixty-four element transducer placed directly ona stainless steel sample with features such as side-drilled holes shown.
If the expected shear and longitudinal sound speeds of thematerial are known, another measure of convergence is theproximity of ν to one of these sound speeds. The resultprovides a new tool for precisely determining source of thereturned signal in the pulse echo mode.
An additional tool used for visualization is a wave prop-agation graph. Semi-circles are plotted about the transducerelement locations at a radius equal to the distance traveledin 0.5tf minus the delay to the transducer. This shows thelocation of the wave fronts. The more tightly compact thelocations of the intersections of these semi-circles the closerto convergence on a point source. For this paper this is leftas a qualitative measure.
IV. EXPERIMENTAL SETUP AND RESULTS
This section describes the experimental setup used to vali-date the algorithms. The algorithms were demonstrated withphased array hardware and blocks. A result for determiningan accurate origin of a signal for each of the two methodsof focusing are presented.
A. Experimental Setup
This section describes the setup for the experiment andthe equipment and software used of the development andexperiments. The phased array hardware is the Focus LT byOlympus NDT, that can support 128 individual transducerelements with apertures of up to 32 elements on eachtransmit and receive channels. The transducer used was a64 element linear array with center to center spacing (pitch)of 0.75mm. For the experiments here the transducer was indirect contact with the part under test with a gel couplantused to efficiently couple energy from the transducer to thepart. Fig. 6 shows a photo graph of a typical set up with thetransducer on a 316 series stainless block with calibrationfeatures such as side drill holes and notches. The block isnominally 19mm thick.
Am
plitu
de
100
-100-80-60-40-20
020406080
Time(uS)2.198E-50 1E-5
Am
plitu
de
100
-100-80-60-40-20
020406080
Time(uS)1.68E-51.392E-5 1.5E-5 1.6E-5
Del
ay(s
)
1.2E-6
0
2E-7
4E-7
6E-7
8E-7
1E-6
Element Number300 5 10 15 20 25
Fig. 7. Example of genetic algorithm focusing with each elements delayas possible mutation. An increase in amplitude or fitness is achieved withthe flattening of the focal law delay curve. Since the reflecting surface islarge and flat this is an intuitive solution. Note: signals due to reflectorsother than the one of interest will decrease in amplitude.
B. Results
Results of experimental runs using FoDI are shown forboth variations of EBF the individual delay method andfor the parameter variation method discussed in Section III.Trials have been conducted with these method using thesetup described with the transducer placed on the block inan arbitrary proximity to the side drill holes in the block.The experiments thus far have been chosen ad hoc with astarting condition of the focal law for one channel. Typicallya small signal transient compared to the larger signal waschosen and the start of the window set at the beginningof it. The algorithms would be run until the amplitude ofthe signal achieved a significantly higher amplitude. Theamplitude versus time signal for the current best case and thetrial case were recorded on each successful improvement inthe amplitude. The focal law delays were also recorded. Thetrials could then be displayed and analyzed. One result foreach type is shown here to illustrate feasibility and utility.Results are presented with graphs of the amplitude versustime signal signal over the experimental run. The signals

and focal law delays is shown the start, middle and end ofthe experiment to illustrate the progression
1) Individual Delays: The result for the individual ran-dom delays method is shown here. The initial focus is atan off normal angle but essentially focused on the backwall (19mm thick), in the shear wave mode. The result offocusing on a very large target with the individual delays isthe beginning of a flattening out of the focal law curve asshown in Fig. 7. This is somewhat intuitive in that even acompletely flat set of delays would provide a large amountof return back to the transducer at the same time. Althoughthe curve fit does not work well, the approximate locationof the reflector is still predicted with some error as shownby the small cross-hair in Fig. 8. The wave propagationshows a horizontal surface line of intersection at the 19mmback wall depth. This shows the potential for an amorphoustype of focusing. It should be noted that convergence withindividual delays can take thousands of iterations and is notlikely practical in a real time application but does show thatfocusing can be achieve through a very naive technique. Themaximum delay change was set to ∆td = 10ns.
2) Physical Parameter : The example result shown for themethod of varying individual parameters, produced resultsin far fewer iterations as shown in Fig. 9. The startingpoint was for a point solved for a focus of a coordinateof (19.33mm, 10.34mm) and a sound speed of 4.4mm/µs.Maximum changes were chosen as 1mm for the horizon-tal and vertical position and 0.1mm/µs for the velocityparameter. The experiment converged to a coordinate of(19.54mm, 13.37mm) and a sound speed of 5.6mm/µs.The target in this case was the 3/4 depth target centeredat a depth of approximately 14.25mm. With the diameterof the side drill hole at close to 2mm the approximate isreasonable. Here convergence had slowed but did continued.Actual longitudinal sound speed in this steel is approxi-mately 5.8mm/µs. This exemplifies the ability to correctthe positioning of a small signal with these methods. Theconvergence is illustrated in the final wave propagationgraphic in the upper right of Fig. 9. The source of the signalis thus effectively determined to be off axis from the centerline that would normally be used to create the image. Herethe image could be adjusted.
V. CONCLUSIONS AND FUTURE WORK
Conclusions and follow on work on EBF and FoDI arediscussed in this section.
A. Conclusions
EBF combined with FoDI described in the paper formthe basis for a new powerful tool for the nondestructiveexamination community. The paper describes the orignalcontribution to the computational intelligence communityand nondesctive examination comunity by providing themeans to identify the specific origin of an arbitrary pulseecho signal without assuming a sound speed. Using theseevolutionary algorithm based focusing techniqes and derivedinverse focal law equations, a system can provide the exact
source of a indication (i.e. reflection) automatically. Thiscan improve tomographic data by correcting the positionor eliminating artifacts in rendered images of the data. Ifimplemented in hardware and firmware, a nondestructiveexamination technician could resolve previously enigmas inan ultrasonic signal.
B. Future Work
There are many avenues to take these algorithms. The mostpressing is the improvement of the speed of convergence. Thewave propagation graphs give a clue for a more intelligentsearch for the the paths that may lead to improved conver-gence rate. If the possible sound speeds for the materialare known this these graphs give a clue in the groupingsof the intersection of the propagation curves to what shouldbe tried.
VI. ACKNOWLEDGMENTS
The authors are grateful for the assistance of Olympus-NDT, particularly for allowing the use of the beta version ofTomoview to allow software control over individual delaysin focal laws through a software interface. A special thanksto Michael Moles of OlympusNDT and the University ofToronto for providing comments and insight on the draft ofthis paper.
REFERENCES
[1] Z. Liu, D. S. Forsyth, J. P. Komorowski, K. Hanasaki, and T. Kirubara-jan, “Survey: State of the art in NDE data fusion techniques,” IEEETransactions on Instrumentation and Measurement, vol. 56, no. 6, pp.2435–2451, DEC 2007.
[2] E. Moura, R. Silva, M. Siqueira, and J. Rebello, “Pattern recognition ofweld defects in preprocessed TOFD signals using linear classifiers,”Journal of Nondestructive Evaluation, vol. 23, no. 4, pp. 163–172,DEC 2004.
[3] J. Huang, P. Que, and J. Jin, “A parametric study of beam steeringfor ultrasonic linear phased array transducer,” Russian Journal ofNondestructive Testing, vol. 40, no. 4, pp. 254–259, APR 2004.
[4] N. Portzgen, D. Gisolf, and D. J. Verschuur, “Wave equation-basedimaging of mode converted waves in ultrasonic NDI, with suppressedleakage from nonmode converted waves,” IEEE Transactions onUltrasonics, Ferroelectrics and Frequency Control, vol. 55, no. 8, pp.1768–1780, AUG 2008.
[5] C. R. Bowen, L. R. Bradley, D. P. Almond, and P. D. Wilcox,“Flexible piezoelectric transducer for ultrasonic inspection of non-planar components,” Ultrasonics, vol. 48, no. 5, pp. 367–375, SEP2008.
[6] C. Holmes, B. W. Drinkwater, and P. D. Wilcox, “Advancedpost-processing for scanned ultrasonic arrays: Applicationto defect detection and classification in non-destructiveevaluation,” Ultrasonics, vol. 48, no. 6-7, pp. 636 – 642,2008, selected Papers from ICU 2007. [Online]. Avail-able: http://www.sciencedirect.com/science/article/B6TW2-4T84JYC-1/2/18e984fe49f080ed972622bd232eaf45
[7] ——, “Post-processing of the full matrix of ultrasonic transmit-receive array data for non-destructive evaluation,” NDT & EInternational, vol. 38, no. 8, pp. 701 – 711, 2005. [Online]. Avail-able: http://www.sciencedirect.com/science/article/B6V4C-4GDBT81-1/2/a0bdf4643018ce41ec312997f2fc0fb2
[8] C. Holmes, B. Drinkwater, and P. Wilcox, “Post-processing of ultra-sonic phased array data for optimal performance,” Insight, vol. 47,no. 2, pp. 88–90, FEB 2005.
[9] M. O’Donnell and S. Flax, “Phase-aberration correction using signalsfrom point reflectors and diffuse scatterers: measurements,” IEEETransactions on Ultrasonics, Ferroelectrics and Frequency Control,vol. 35, no. 6, pp. 768–774, Nov 1988.

Amplitude1
0
0.2
0.4
0.6
0.8
Step1600 20 40 60 80 100 120 140
0.0
10.0
20.0
30.0
40.0
-30.0 -20.0 -10.0 0.0 10.0 20.0 30.0 40.0
0.0
10.0
20.0
30.0
40.0
-30.0 -20.0 -10.0 0.0 10.0 20.0 30.0 40.0
0.0
10.0
20.0
30.0
40.0
-30.0 -20.0 -10.0 0.0 10.0 20.0 30.0 40.0
Fig. 8. The wave propagation of the two modes of travel expected sounds speeds are plotted. A semi-circle of the given radius for the travel given thetime of flight for each element (i.e. overall time of flight minus the delay to that element) is plotted. The figure shows the amplitude increasing an themore spatially compact intersection of the delay formed ripples on the upper set of semicircles.
Am
plitu
de
1
0Step
300 10 20
Y
0.
10.
20.
-30. -20. -10. 0. 10. 20. 30. 40.
0.
10.
20.
-30. -20. -10. 0. 10. 20. 30. 40
0.
10.
20.
-30. -20. -10. 0. 10. 20. 30. 40
Ampl
itude
-50
-40
-30
-20
-10
0
10
20
30
40
50
Time(uS)128 9 10 11
StartMiddleEnd
Del
ay(s
)
3E-6
0
1E-6
2E-6
Element Number300 10 20
Fig. 9. The top sequence shows the convergence of the wave propagation to the higher velocity longitudinal wave. The long cursor in the right pane wasremoved from the graphic because it obscured the parameter fit position. The A-scan progression is shown on the lower left with the resulting focal lawsin the lower right.
[10] K. S. Miller, C. R. Tolle, D. E. Clark, C. I. Nichol, T. R. McJunkin,and H. B. Smartt, “Investigation into interface lifting within FSW lapwelds,” in Proceedings of the 8th International Confereence Trends inWelding Research, S. A. David, T. DebRoy, J. N. DuPont, T. Koecki,and H. B. Smartt, Eds., 2008, pp. 133–139.