Embed Size (px)
Citation preview
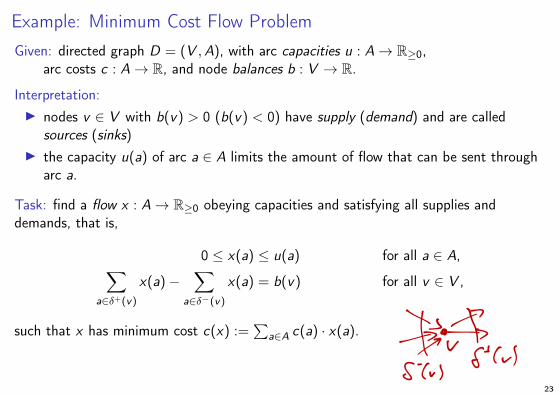
Example: Minimum Cost Flow Problem
Given: directed graph D = (V ,A), with arc capacities u : A ! R�0,arc costs c : A ! R, and node balances b : V ! R.
Interpretation:I nodes v 2 V with b(v) > 0 (b(v) < 0) have supply (demand) and are called
sources (sinks)I the capacity u(a) of arc a 2 A limits the amount of flow that can be sent through
arc a.
Task: find a flow x : A ! R�0 obeying capacities and satisfying all supplies anddemands, that is,
0 x(a) u(a) for all a 2 A,X
a2�+(v)
x(a)�X
a2��(v)
x(a) = b(v) for all v 2 V ,
such that x has minimum cost c(x) :=P
a2A c(a) · x(a).
23
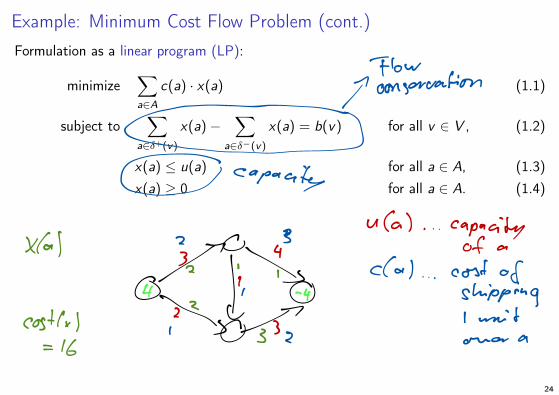
Example: Minimum Cost Flow Problem (cont.)
Formulation as a linear program (LP):
minimizeX
a2Ac(a) · x(a) (1.1)
subject toX
a2�+(v)
x(a)�X
a2��(v)
x(a) = b(v) for all v 2 V , (1.2)
x(a) u(a) for all a 2 A, (1.3)x(a) � 0 for all a 2 A. (1.4)
I Objective function given by (1.1). Set of feasible solutions:
X = {x 2 RA | x satisfies (1.2), (1.3), and (1.4)} .
I Notice that (1.1) is a linear function of x and (1.2) – (1.4) are linear equations andlinear inequalities, respectively. �! linear program
24
Example: Minimum Cost Flow Problem (cont.)
Formulation as a linear program (LP):
minimizeX
a2Ac(a) · x(a) (1.1)
subject toX
a2�+(v)
x(a)�X
a2��(v)
x(a) = b(v) for all v 2 V , (1.2)
x(a) u(a) for all a 2 A, (1.3)x(a) � 0 for all a 2 A. (1.4)
I Objective function given by (1.1). Set of feasible solutions:
X = {x 2 RA | x satisfies (1.2), (1.3), and (1.4)} .
I Notice that (1.1) is a linear function of x and (1.2) – (1.4) are linear equations andlinear inequalities, respectively. �! linear program
24
Example: Minimum Cost Flow Problem (cont.)
Formulation as a linear program (LP):
minimizeX
a2Ac(a) · x(a) (1.1)
subject toX
a2�+(v)
x(a)�X
a2��(v)
x(a) = b(v) for all v 2 V , (1.2)
x(a) u(a) for all a 2 A, (1.3)x(a) � 0 for all a 2 A. (1.4)
I Objective function given by (1.1). Set of feasible solutions:
X = {x 2 RA | x satisfies (1.2), (1.3), and (1.4)} .
I Notice that (1.1) is a linear function of x and (1.2) – (1.4) are linear equations andlinear inequalities, respectively. �! linear program
24
Example (cont.): Adding Fixed Cost
Fixed costs w : A ! R�0.
If arc a 2 A shall be used (i. e., x(a) > 0), it must be bought at cost w(a).
Add variables y(a) 2 {0, 1} with y(a) = 1 if arc a is used, 0 otherwise.
This leads to the following mixed-integer linear program (MIP):
minimizeX
a2Ac(a) · x(a) +
X
a2Aw(a) · y(a)
subject toX
a2�+(v)
x(a)�X
a2��(v)
x(a) = b(v) for all v 2 V ,
x(a) u(a) · y(a) for all a 2 A,x(a) � 0 for all a 2 A.y(a) 2 {0, 1} for all a 2 A.
MIP: Linear program where some variables may only take integer values.
25
Example (cont.): Adding Fixed Cost
Fixed costs w : A ! R�0.
If arc a 2 A shall be used (i. e., x(a) > 0), it must be bought at cost w(a).
Add variables y(a) 2 {0, 1} with y(a) = 1 if arc a is used, 0 otherwise.
This leads to the following mixed-integer linear program (MIP):
minimizeX
a2Ac(a) · x(a) +
X
a2Aw(a) · y(a)
subject toX
a2�+(v)
x(a)�X
a2��(v)
x(a) = b(v) for all v 2 V ,
x(a) u(a) · y(a) for all a 2 A,x(a) � 0 for all a 2 A.y(a) 2 {0, 1} for all a 2 A.
MIP: Linear program where some variables may only take integer values.
25
Example (cont.): Adding Fixed Cost
Fixed costs w : A ! R�0.
If arc a 2 A shall be used (i. e., x(a) > 0), it must be bought at cost w(a).
Add variables y(a) 2 {0, 1} with y(a) = 1 if arc a is used, 0 otherwise.
This leads to the following mixed-integer linear program (MIP):
minimizeX
a2Ac(a) · x(a) +
X
a2Aw(a) · y(a)
subject toX
a2�+(v)
x(a)�X
a2��(v)
x(a) = b(v) for all v 2 V ,
x(a) u(a) · y(a) for all a 2 A,x(a) � 0 for all a 2 A.y(a) 2 {0, 1} for all a 2 A.
MIP: Linear program where some variables may only take integer values.
25
Example (cont.): Adding Fixed Cost
Fixed costs w : A ! R�0.
If arc a 2 A shall be used (i. e., x(a) > 0), it must be bought at cost w(a).
Add variables y(a) 2 {0, 1} with y(a) = 1 if arc a is used, 0 otherwise.
This leads to the following mixed-integer linear program (MIP):
minimizeX
a2Ac(a) · x(a) +
X
a2Aw(a) · y(a)
subject toX
a2�+(v)
x(a)�X
a2��(v)
x(a) = b(v) for all v 2 V ,
x(a) u(a) · y(a) for all a 2 A,x(a) � 0 for all a 2 A.y(a) 2 {0, 1} for all a 2 A.
MIP: Linear program where some variables may only take integer values.
25
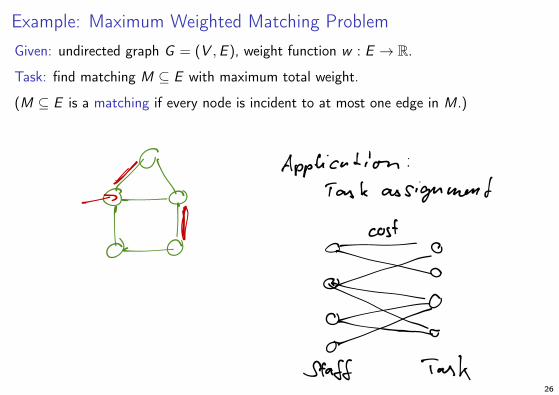
Example: Maximum Weighted Matching Problem
Given: undirected graph G = (V ,E ), weight function w : E ! R.
Task: find matching M ✓ E with maximum total weight.
(M ✓ E is a matching if every node is incident to at most one edge in M.)
Formulation as an integer linear program (IP):
Variables: xe 2 {0, 1} for e 2 E with xe = 1 if and only if e 2 M.
maximizeX
e2Ew(e) · xe
subject toX
e2�(v)
xe 1 for all v 2 V ,
xe 2 {0, 1} for all e 2 E .
IP: Linear program where all variables may only take integer values.
26
Example: Maximum Weighted Matching Problem
Given: undirected graph G = (V ,E ), weight function w : E ! R.
Task: find matching M ✓ E with maximum total weight.
(M ✓ E is a matching if every node is incident to at most one edge in M.)
Formulation as an integer linear program (IP):
Variables: xe 2 {0, 1} for e 2 E with xe = 1 if and only if e 2 M.
maximizeX
e2Ew(e) · xe
subject toX
e2�(v)
xe 1 for all v 2 V ,
xe 2 {0, 1} for all e 2 E .
IP: Linear program where all variables may only take integer values.
26
Example: Maximum Weighted Matching Problem
Given: undirected graph G = (V ,E ), weight function w : E ! R.
Task: find matching M ✓ E with maximum total weight.
(M ✓ E is a matching if every node is incident to at most one edge in M.)
Formulation as an integer linear program (IP):
Variables: xe 2 {0, 1} for e 2 E with xe = 1 if and only if e 2 M.
maximizeX
e2Ew(e) · xe
subject toX
e2�(v)
xe 1 for all v 2 V ,
xe 2 {0, 1} for all e 2 E .
IP: Linear program where all variables may only take integer values.
26
Example: Maximum Weighted Matching Problem
Given: undirected graph G = (V ,E ), weight function w : E ! R.
Task: find matching M ✓ E with maximum total weight.
(M ✓ E is a matching if every node is incident to at most one edge in M.)
Formulation as an integer linear program (IP):
Variables: xe 2 {0, 1} for e 2 E with xe = 1 if and only if e 2 M.
maximizeX
e2Ew(e) · xe
subject toX
e2�(v)
xe 1 for all v 2 V ,
xe 2 {0, 1} for all e 2 E .
IP: Linear program where all variables may only take integer values.
26
Example: Traveling Salesperson Problem (TSP)
Given: complete graph Kn on n nodes, weight function w : E (Kn) ! R.
Task: find a Hamiltonian circuit with minimum total weight.
(A Hamiltonian circuit visits every node exactly once.)
Application: Drilling holes in printed circuit boards.
Formulation as an integer linear program? (maybe later!)
27
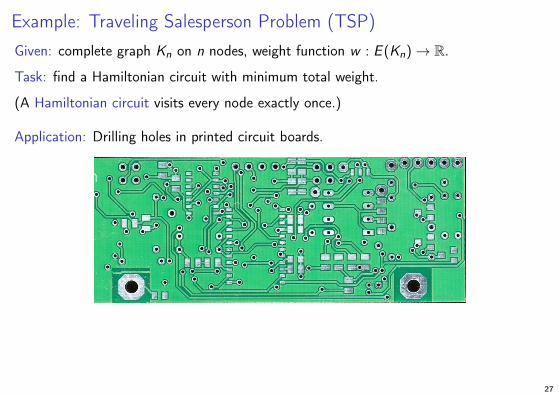
Example: Traveling Salesperson Problem (TSP)
Given: complete graph Kn on n nodes, weight function w : E (Kn) ! R.
Task: find a Hamiltonian circuit with minimum total weight.
(A Hamiltonian circuit visits every node exactly once.)
Application: Drilling holes in printed circuit boards.
Formulation as an integer linear program? (maybe later!)
27
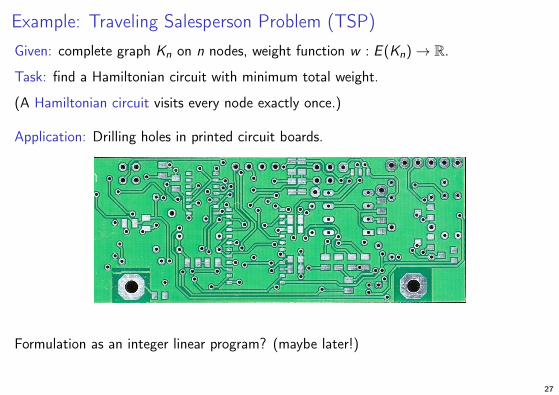
Example: Traveling Salesperson Problem (TSP)
Given: complete graph Kn on n nodes, weight function w : E (Kn) ! R.
Task: find a Hamiltonian circuit with minimum total weight.
(A Hamiltonian circuit visits every node exactly once.)
Application: Drilling holes in printed circuit boards.
Formulation as an integer linear program? (maybe later!)
27
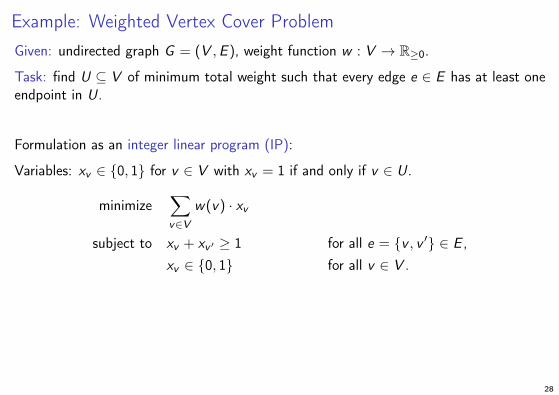
Example: Weighted Vertex Cover Problem
Given: undirected graph G = (V ,E ), weight function w : V ! R�0.
Task: find U ✓ V of minimum total weight such that every edge e 2 E has at least oneendpoint in U.
Formulation as an integer linear program (IP):
Variables: xv 2 {0, 1} for v 2 V with xv = 1 if and only if v 2 U.
minimizeX
v2Vw(v) · xv
subject to xv + xv 0 � 1 for all e = {v , v 0} 2 E ,xv 2 {0, 1} for all v 2 V .
28
Example: Weighted Vertex Cover Problem
Given: undirected graph G = (V ,E ), weight function w : V ! R�0.
Task: find U ✓ V of minimum total weight such that every edge e 2 E has at least oneendpoint in U.
Formulation as an integer linear program (IP):
Variables: xv 2 {0, 1} for v 2 V with xv = 1 if and only if v 2 U.
minimizeX
v2Vw(v) · xv
subject to xv + xv 0 � 1 for all e = {v , v 0} 2 E ,xv 2 {0, 1} for all v 2 V .
28
Example: Weighted Vertex Cover Problem
Given: undirected graph G = (V ,E ), weight function w : V ! R�0.
Task: find U ✓ V of minimum total weight such that every edge e 2 E has at least oneendpoint in U.
Formulation as an integer linear program (IP):
Variables: xv 2 {0, 1} for v 2 V with xv = 1 if and only if v 2 U.
minimizeX
v2Vw(v) · xv
subject to xv + xv 0 � 1 for all e = {v , v 0} 2 E ,xv 2 {0, 1} for all v 2 V .
28
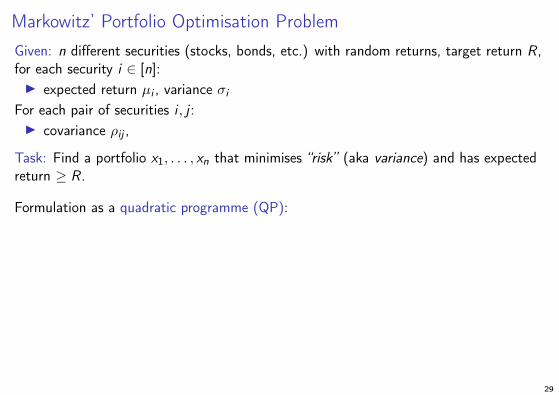
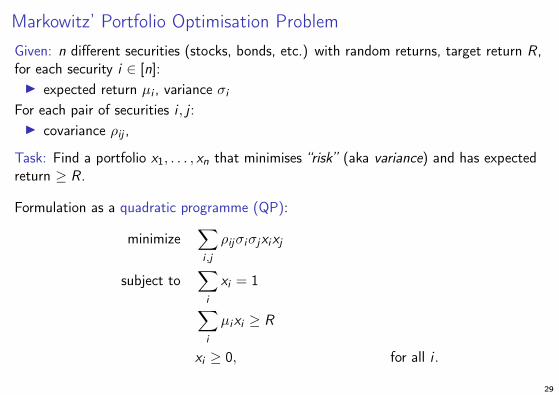
Markowitz’ Portfolio Optimisation Problem
Given: n different securities (stocks, bonds, etc.) with random returns, target return R ,for each security i 2 [n]:I expected return µi , variance �i
For each pair of securities i , j :I covariance ⇢ij ,
Task: Find a portfolio x1, . . . , xn that minimises “risk” (aka variance) and has expectedreturn � R .
Formulation as a quadratic programme (QP):
minimizeX
i ,j
⇢ij�i�jxixj
subject toX
i
xi = 1
X
i
µixi � R
xi � 0, for all i .
29
Markowitz’ Portfolio Optimisation Problem
Given: n different securities (stocks, bonds, etc.) with random returns, target return R ,for each security i 2 [n]:I expected return µi , variance �i
For each pair of securities i , j :I covariance ⇢ij ,
Task: Find a portfolio x1, . . . , xn that minimises “risk” (aka variance) and has expectedreturn � R .
Formulation as a quadratic programme (QP):
minimizeX
i ,j
⇢ij�i�jxixj
subject toX
i
xi = 1
X
i
µixi � R
xi � 0, for all i .
29
Markowitz’ Portfolio Optimisation Problem
Given: n different securities (stocks, bonds, etc.) with random returns, target return R ,for each security i 2 [n]:I expected return µi , variance �i
For each pair of securities i , j :I covariance ⇢ij ,
Task: Find a portfolio x1, . . . , xn that minimises “risk” (aka variance) and has expectedreturn � R .
Formulation as a quadratic programme (QP):
minimizeX
i ,j
⇢ij�i�jxixj
subject toX
i
xi = 1
X
i
µixi � R
xi � 0, for all i .
29
Typical Questions
For a given optimization problem:
I How to find an optimal solution?
I How to find a feasible solution?
I Does there exist an optimal/feasible solution?
I How to prove that a computed solution is optimal?
I How difficult is the problem?
I Does there exist an efficient algorithm with “small” worst-case running time?
I How to formulate the problem as a (mixed integer) linear program?
I Is there a useful special structure of the problem?
30
Typical Questions
For a given optimization problem:
I How to find an optimal solution?
I How to find a feasible solution?
I Does there exist an optimal/feasible solution?
I How to prove that a computed solution is optimal?
I How difficult is the problem?
I Does there exist an efficient algorithm with “small” worst-case running time?
I How to formulate the problem as a (mixed integer) linear program?
I Is there a useful special structure of the problem?
30
Typical Questions
For a given optimization problem:
I How to find an optimal solution?
I How to find a feasible solution?
I Does there exist an optimal/feasible solution?
I How to prove that a computed solution is optimal?
I How difficult is the problem?
I Does there exist an efficient algorithm with “small” worst-case running time?
I How to formulate the problem as a (mixed integer) linear program?
I Is there a useful special structure of the problem?
30
Typical Questions
For a given optimization problem:
I How to find an optimal solution?
I How to find a feasible solution?
I Does there exist an optimal/feasible solution?
I How to prove that a computed solution is optimal?
I How difficult is the problem?
I Does there exist an efficient algorithm with “small” worst-case running time?
I How to formulate the problem as a (mixed integer) linear program?
I Is there a useful special structure of the problem?
30
Typical Questions
For a given optimization problem:
I How to find an optimal solution?
I How to find a feasible solution?
I Does there exist an optimal/feasible solution?
I How to prove that a computed solution is optimal?
I How difficult is the problem?
I Does there exist an efficient algorithm with “small” worst-case running time?
I How to formulate the problem as a (mixed integer) linear program?
I Is there a useful special structure of the problem?
30
Typical Questions
For a given optimization problem:
I How to find an optimal solution?
I How to find a feasible solution?
I Does there exist an optimal/feasible solution?
I How to prove that a computed solution is optimal?
I How difficult is the problem?
I Does there exist an efficient algorithm with “small” worst-case running time?
I How to formulate the problem as a (mixed integer) linear program?
I Is there a useful special structure of the problem?
30
Typical Questions
For a given optimization problem:
I How to find an optimal solution?
I How to find a feasible solution?
I Does there exist an optimal/feasible solution?
I How to prove that a computed solution is optimal?
I How difficult is the problem?
I Does there exist an efficient algorithm with “small” worst-case running time?
I How to formulate the problem as a (mixed integer) linear program?
I Is there a useful special structure of the problem?
30
Typical Questions
For a given optimization problem:
I How to find an optimal solution?
I How to find a feasible solution?
I Does there exist an optimal/feasible solution?
I How to prove that a computed solution is optimal?
I How difficult is the problem?
I Does there exist an efficient algorithm with “small” worst-case running time?
I How to formulate the problem as a (mixed integer) linear program?
I Is there a useful special structure of the problem?
30
Literature on Linear Optimization (not complete)
I D. Bertsimas, J. N. Tsitsiklis, Introduction to Linear Optimization, Athena, 1997.
I V. Chvatal, Linear Programming, Freeman, 1983.
I G. B. Dantzig, Linear Programming and Extensions, Princeton University Press,1998 (1963).
I M. Grötschel, L. Lovàsz, A. Schrijver, Geometric Algorithms and Combinatorial
Optimization. Springer, 1988.
I J. Matousek, B. Gärtner, Using and Understanding Linear Programming, Springer,2006.
I M. Padberg, Linear Optimization and Extensions, Springer, 1995.
I A. Schrijver, Theory of Linear and Integer Programming, Wiley, 1986.
I R. J. Vanderbei, Linear Programming, Springer, 2001.
31
Literature on Combinatorial Optimization (not complete)
I R. K. Ahuja, T. L. Magnanti, J. B. Orlin, Network Flows: Theory, Algorithms, and
Applications, Prentice-Hall, 1993.I W. J. Cook, W. H. Cunningham, W. R. Pulleyblank, A. Schrijver, Combinatorial
Optimization, Wiley, 1998.I L. R. Ford, D. R. Fulkerson, Flows in Networks, Princeton University Press, 1962.I M. R. Garey, D. S. Johnson, Computers and Intractability: A Guide to the Theory
of NP-Completeness, Freeman, 1979.I B. Korte, J. Vygen, Combinatorial Optimization: Theory and Algorithms, Springer,
2002.I C. H. Papadimitriou, K. Steiglitz, Combinatorial Optimization: Algorithms and
Complexity, Dover Publications, reprint 1998.I A. Schrijver, Combinatorial Optimization: Polyhedra and Efficiency, Springer, 2003.
32

Chapter 2:Linear Programming Basics
(Bertsimas & Tsitsiklis, Chapter 1)
33
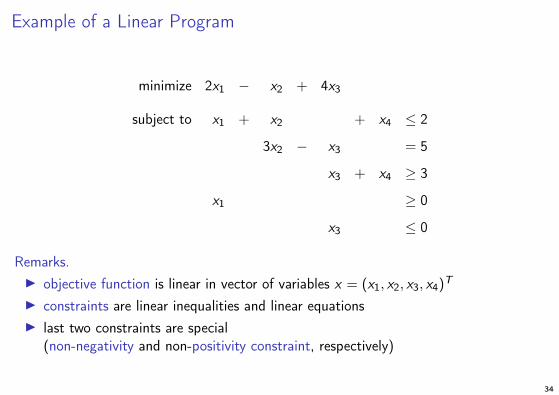
Example of a Linear Program
minimize 2x1 � x2 + 4x3
subject to x1 + x2 + x4 2
3x2 � x3 = 5
x3 + x4 � 3
x1 � 0
x3 0
Remarks.I objective function is linear in vector of variables x = (x1, x2, x3, x4)T
I constraints are linear inequalities and linear equationsI last two constraints are special
(non-negativity and non-positivity constraint, respectively)
34
Example of a Linear Program
minimize 2x1 � x2 + 4x3
subject to x1 + x2 + x4 2
3x2 � x3 = 5
x3 + x4 � 3
x1 � 0
x3 0
Remarks.I objective function is linear in vector of variables x = (x1, x2, x3, x4)T
I constraints are linear inequalities and linear equationsI last two constraints are special
(non-negativity and non-positivity constraint, respectively)
34
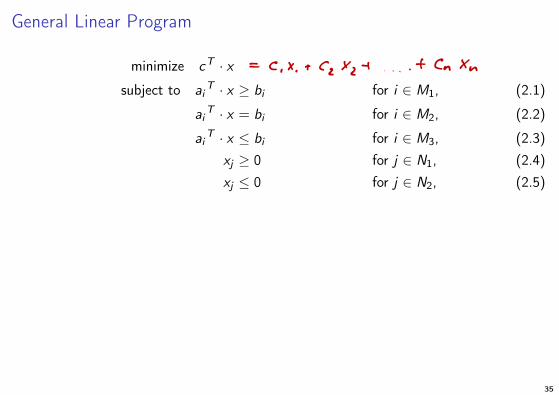
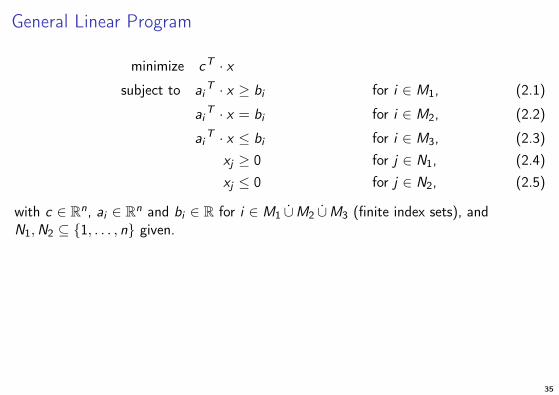
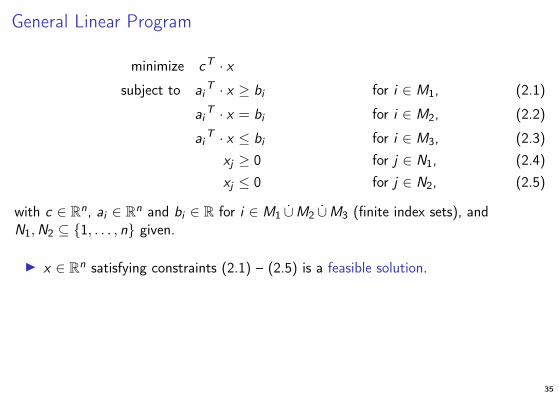
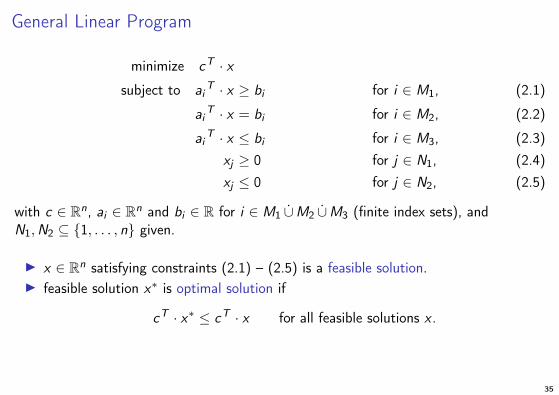
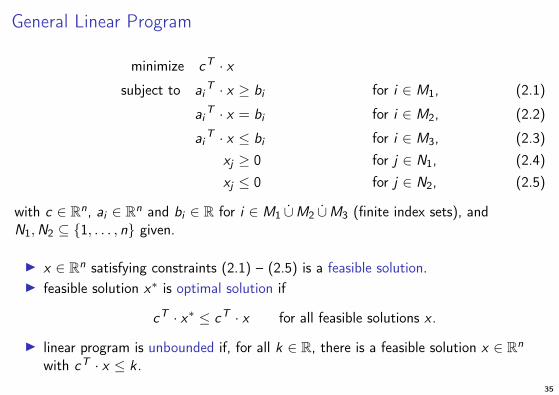
General Linear Program
minimize cT · xsubject to ai
T · x � bi for i 2 M1, (2.1)
aiT · x = bi for i 2 M2, (2.2)
aiT · x bi for i 2 M3, (2.3)
xj � 0 for j 2 N1, (2.4)xj 0 for j 2 N2, (2.5)
with c 2 Rn, ai 2 Rn and bi 2 R for i 2 M1 [̇M2 [̇M3 (finite index sets), andN1,N2 ✓ {1, . . . , n} given.
I x 2 Rn satisfying constraints (2.1) – (2.5) is a feasible solution.I feasible solution x⇤ is optimal solution if
cT · x⇤ cT · x for all feasible solutions x .
I linear program is unbounded if, for all k 2 R, there is a feasible solution x 2 Rn
with cT · x k .
35
General Linear Program
minimize cT · xsubject to ai
T · x � bi for i 2 M1, (2.1)
aiT · x = bi for i 2 M2, (2.2)
aiT · x bi for i 2 M3, (2.3)
xj � 0 for j 2 N1, (2.4)xj 0 for j 2 N2, (2.5)
with c 2 Rn, ai 2 Rn and bi 2 R for i 2 M1 [̇M2 [̇M3 (finite index sets), andN1,N2 ✓ {1, . . . , n} given.
I x 2 Rn satisfying constraints (2.1) – (2.5) is a feasible solution.I feasible solution x⇤ is optimal solution if
cT · x⇤ cT · x for all feasible solutions x .
I linear program is unbounded if, for all k 2 R, there is a feasible solution x 2 Rn
with cT · x k .
35
General Linear Program
minimize cT · xsubject to ai
T · x � bi for i 2 M1, (2.1)
aiT · x = bi for i 2 M2, (2.2)
aiT · x bi for i 2 M3, (2.3)
xj � 0 for j 2 N1, (2.4)xj 0 for j 2 N2, (2.5)
with c 2 Rn, ai 2 Rn and bi 2 R for i 2 M1 [̇M2 [̇M3 (finite index sets), andN1,N2 ✓ {1, . . . , n} given.
I x 2 Rn satisfying constraints (2.1) – (2.5) is a feasible solution.
I feasible solution x⇤ is optimal solution if
cT · x⇤ cT · x for all feasible solutions x .
I linear program is unbounded if, for all k 2 R, there is a feasible solution x 2 Rn
with cT · x k .
35
General Linear Program
minimize cT · xsubject to ai
T · x � bi for i 2 M1, (2.1)
aiT · x = bi for i 2 M2, (2.2)
aiT · x bi for i 2 M3, (2.3)
xj � 0 for j 2 N1, (2.4)xj 0 for j 2 N2, (2.5)
with c 2 Rn, ai 2 Rn and bi 2 R for i 2 M1 [̇M2 [̇M3 (finite index sets), andN1,N2 ✓ {1, . . . , n} given.
I x 2 Rn satisfying constraints (2.1) – (2.5) is a feasible solution.I feasible solution x⇤ is optimal solution if
cT · x⇤ cT · x for all feasible solutions x .
I linear program is unbounded if, for all k 2 R, there is a feasible solution x 2 Rn
with cT · x k .
35
General Linear Program
minimize cT · xsubject to ai
T · x � bi for i 2 M1, (2.1)
aiT · x = bi for i 2 M2, (2.2)
aiT · x bi for i 2 M3, (2.3)
xj � 0 for j 2 N1, (2.4)xj 0 for j 2 N2, (2.5)
with c 2 Rn, ai 2 Rn and bi 2 R for i 2 M1 [̇M2 [̇M3 (finite index sets), andN1,N2 ✓ {1, . . . , n} given.
I x 2 Rn satisfying constraints (2.1) – (2.5) is a feasible solution.I feasible solution x⇤ is optimal solution if
cT · x⇤ cT · x for all feasible solutions x .
I linear program is unbounded if, for all k 2 R, there is a feasible solution x 2 Rn
with cT · x k .35


![20180927 prikaz 4c2.2. ugovora za web · 35(*/(' 3273,6$1,+ 8*2925$ 3r]ly (qhujhwvnd reqryd ylähvwdpehqlk ]judgd 5hihuhqwql eurm .. ,qyhvwlflmvnl sulrulwhw f 3rgxsludqmh hqhujhwvnh](https://img.pdfslide.net/doc/110x75/5fa1994f424b57219e6b5b7a/20180927-prikaz-4c22-ugovora-za-web-35-327361-82925-3rly-qhujhwvnd.jpg)
























![MINIMUM 6 76.[45] HYUNDAI/KIA MINIMUM](https://img.pdfslide.net/doc/110x75/61689563d394e9041f70d5f4/minimum-6-7645-hyundaikia-minimum.jpg)

