Embed Size (px)
Citation preview
Experiencias prácticas del Monitoreo Dinámico en Ingeniería Estructural derivadas del equilibrio entre la
investigación profunda requerida yinvestigación profunda requerida y el tiempo de consultoría disponible
F Consuegra Ph D Ingeniero AsociadoF. Consuegra, Ph.D. Ingeniero AsociadoProfesor Catedrático / Investigador
HECHOSHECHOS
– Estructuras construidas exactamente como se diseñaron?
– Conocimiento de la estructura finalmente construida
– Representatividad de métodos tradicionales (local vs. global)
– Conocimiento de la estructura final
p ( g )
– Evaluación estructural
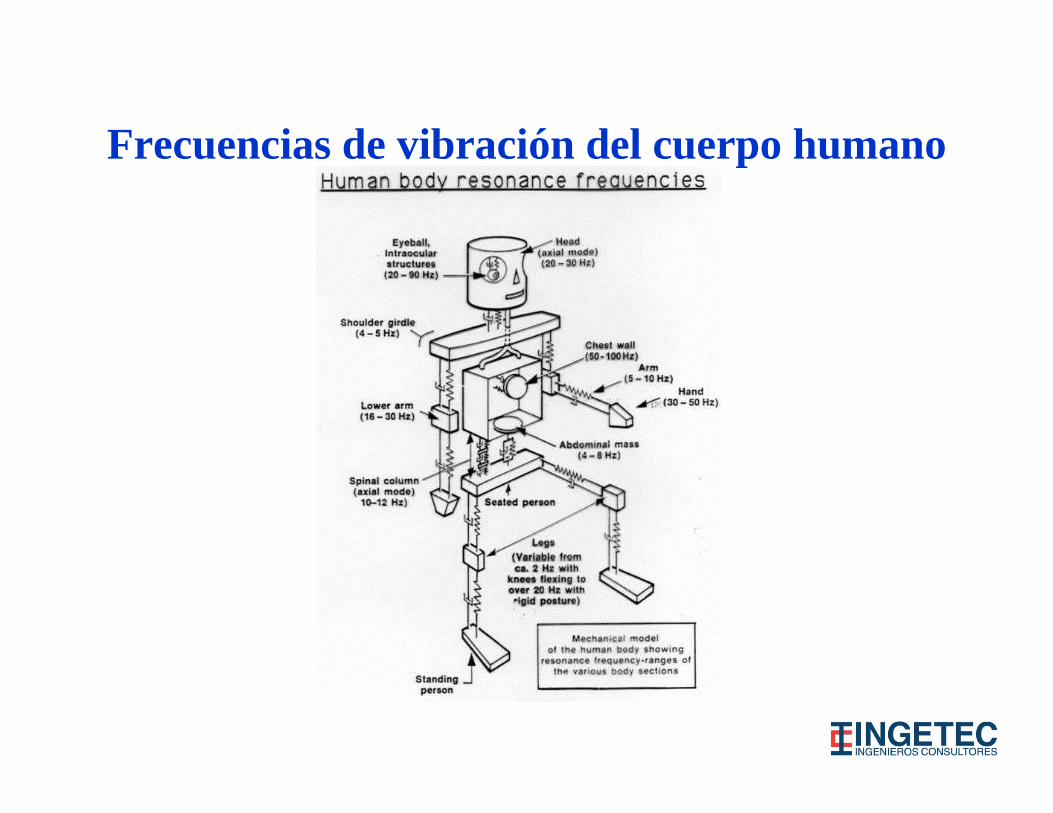
Frecuencias de vibración del cuerpo humanoFrecuencias de vibración del cuerpo humano
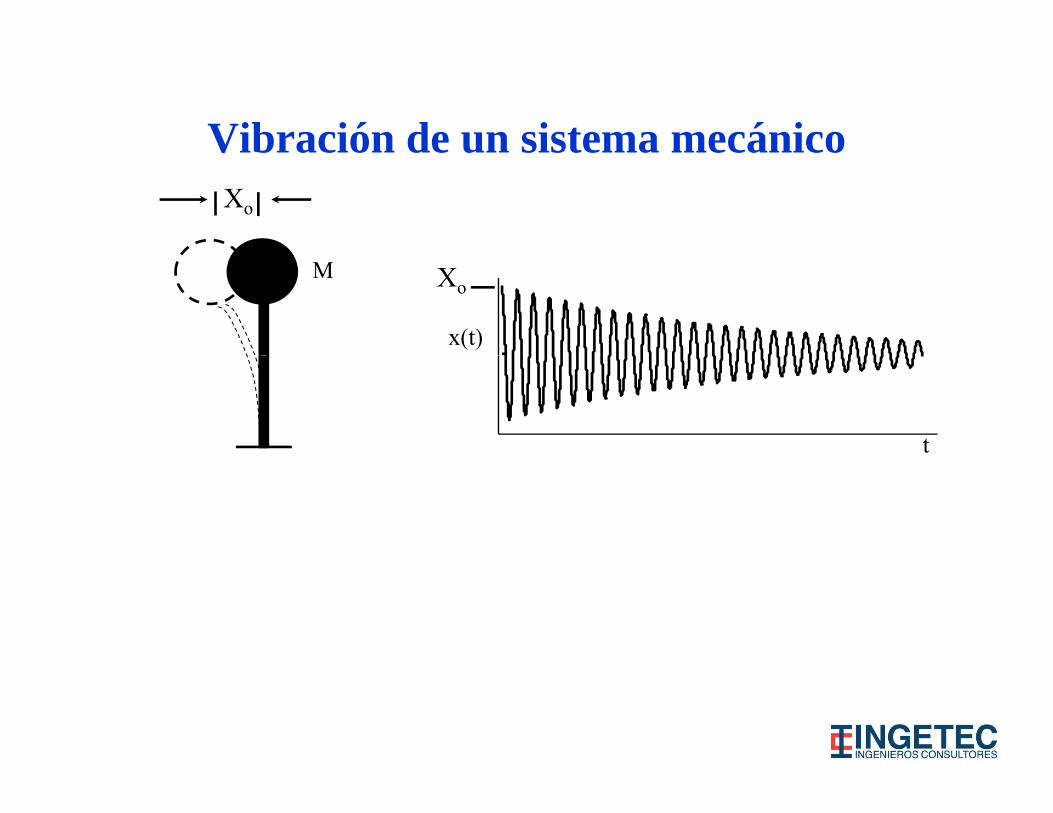
Vibración de un sistema mecánicoVibración de un sistema mecánicoXo
x(t)
Xo
t
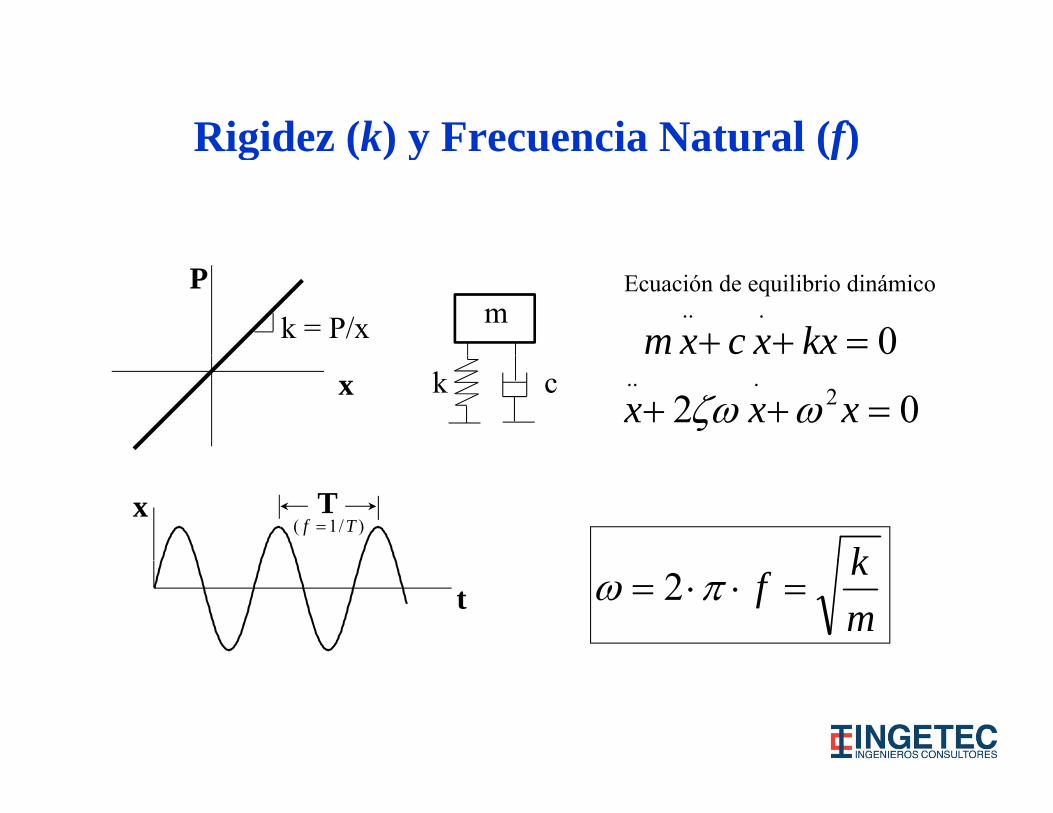
Rigidez (k) y Frecuencia Natural (f)Rigidez (k) y Frecuencia Natural (f)
0...
kxxcxmk = P/xP Ecuación de equilibrio dinámico
m
x02 2
... xxx
k c
x T
k)/1( Tf
t mkf 2
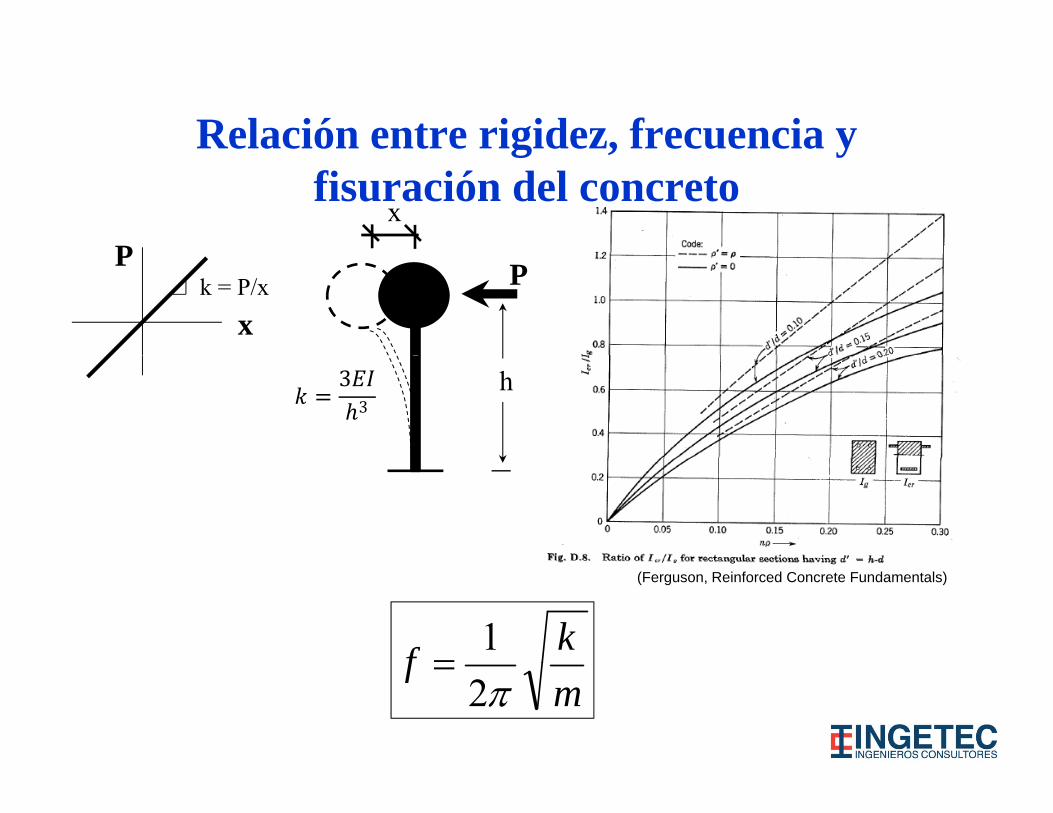
Relación entre rigidez, frecuencia y
Px
g , yfisuración del concreto
k = P/xP
xP
33 h
kf 1
(Ferguson, Reinforced Concrete Fundamentals)
mf
2
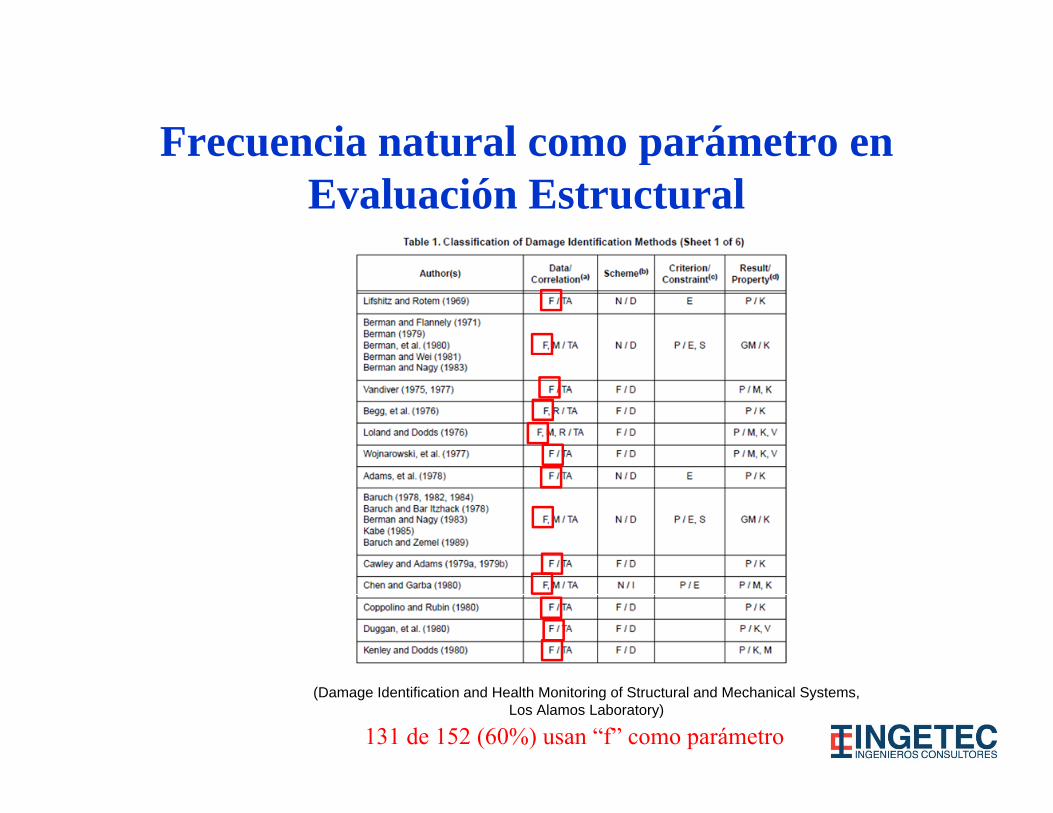
Frecuencia natural como parámetro enFrecuencia natural como parámetro en Evaluación Estructural
131 de 152 (60%) usan “f” como parámetro
(Damage Identification and Health Monitoring of Structural and Mechanical Systems, Los Alamos Laboratory)
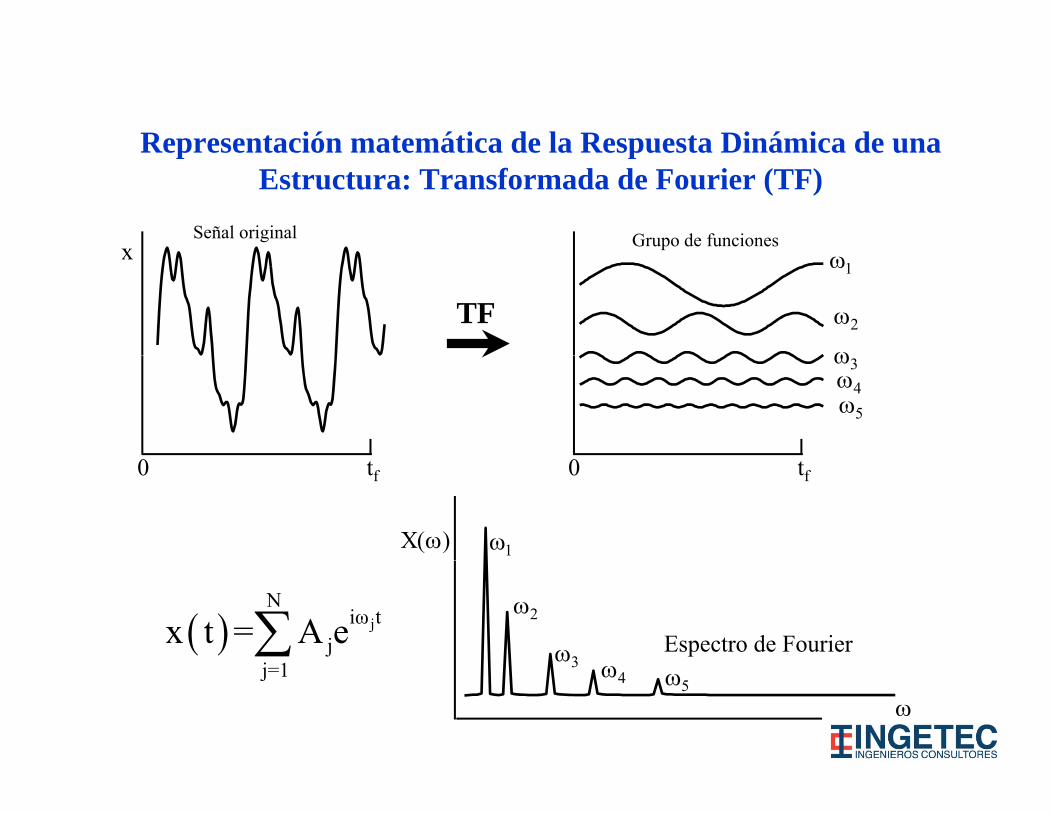
Representación matemática de la Respuesta Dinámica de unaRepresentación matemática de la Respuesta Dinámica de una Estructura: Transformada de Fourier (TF)
Señal original Grupo de funcionesx
TF
x
0 tf 0 tf
X
j
Niω t
jj 1
x t = A e Espectro de Fourier
j=1
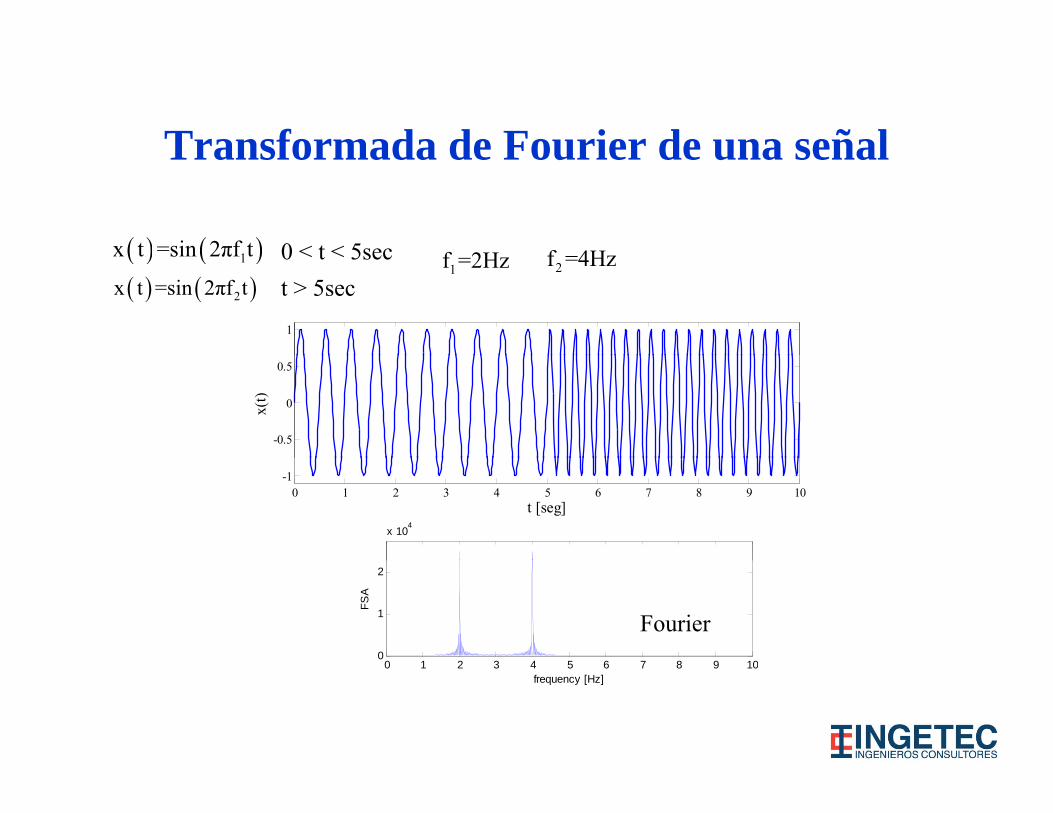
Transformada de Fourier de una señalTransformada de Fourier de una señal
x t =sin 2πf t f 2H f 4H0 < t < 5sec 1x t sin 2πf t
2x t =sin 2πf t1f =2Hz 2f =4Hz
1
0 < t < 5sect > 5sec
-0.5
0
0.5
x(t)
x 104
0 1 2 3 4 5 6 7 8 9 10-1
t [seg]
0 1 2 3 4 5 6 7 8 9 100
1
2
FSA
Fourier0 1 2 3 4 5 6 7 8 9 10
frequency [Hz]

Transformada de Fourier de sistemas lineal y no-lineal
P PP
x xk xk )(
(rigidez constante)
(t) (t)
(rigidez variable)mk
mxk )(
t
x(t)
t
x(t)
X () X ()
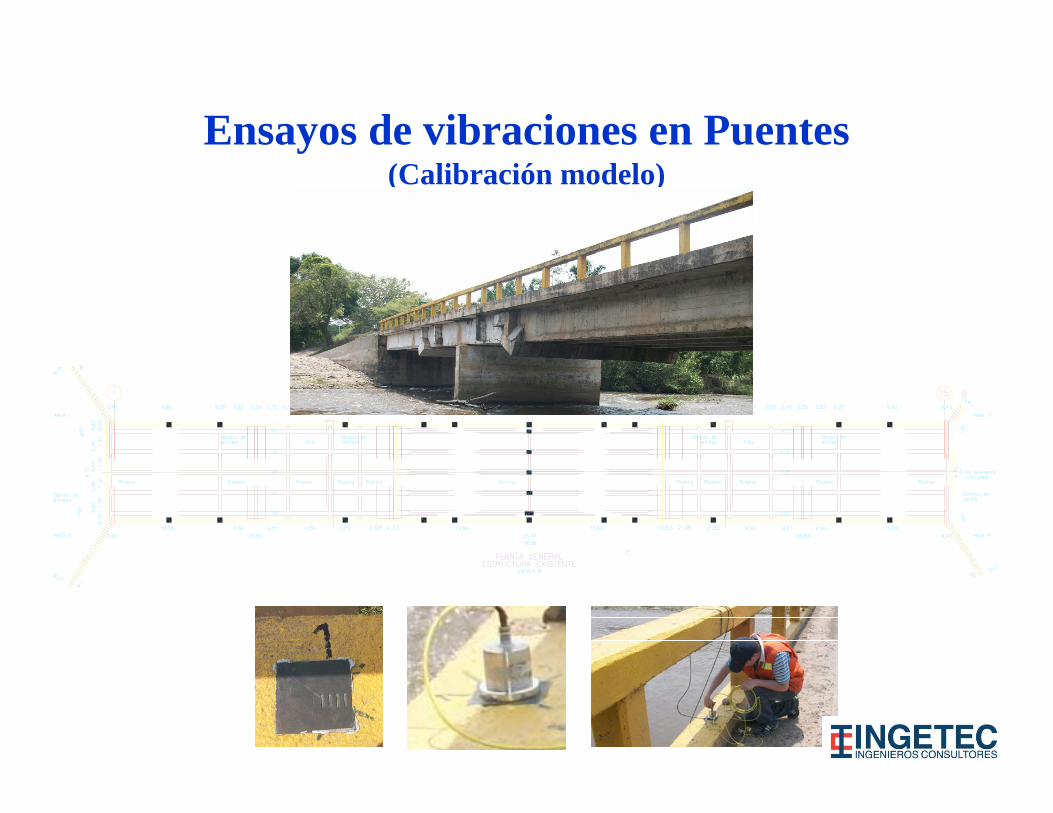
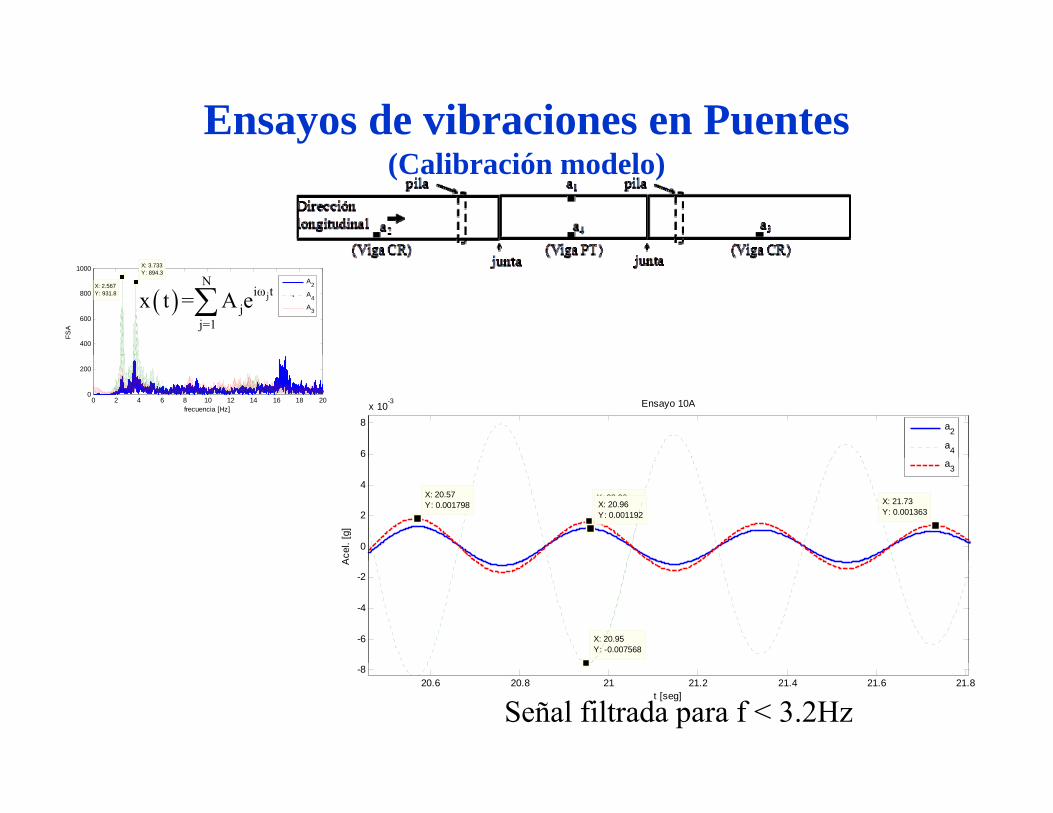
Ensayos de vibraciones en Puentes y(Calibración modelo)
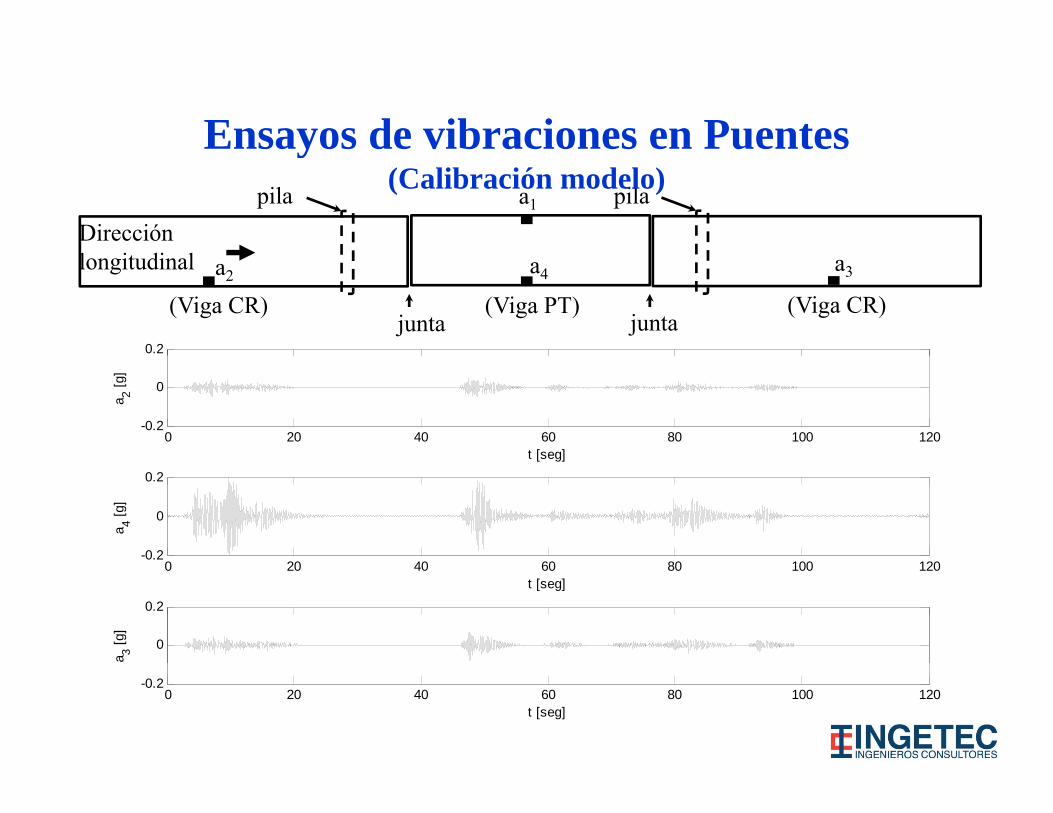
Ensayos de vibraciones en Puentes a1
Direcciónl i di l
pila pila
y(Calibración modelo)
a2 a4longitudinal
junta junta(Viga CR) (Viga PT) (Viga CR)
a3
0.2
0 20 40 60 80 100 120-0.2
0
t [seg]
a 2 [g]
t [seg]
-0.2
0
0.2
a 4 [g]
0 20 40 60 80 100 120t [seg]
0
0.2
a 3 [g]
0 20 40 60 80 100 120-0.2
t [seg]
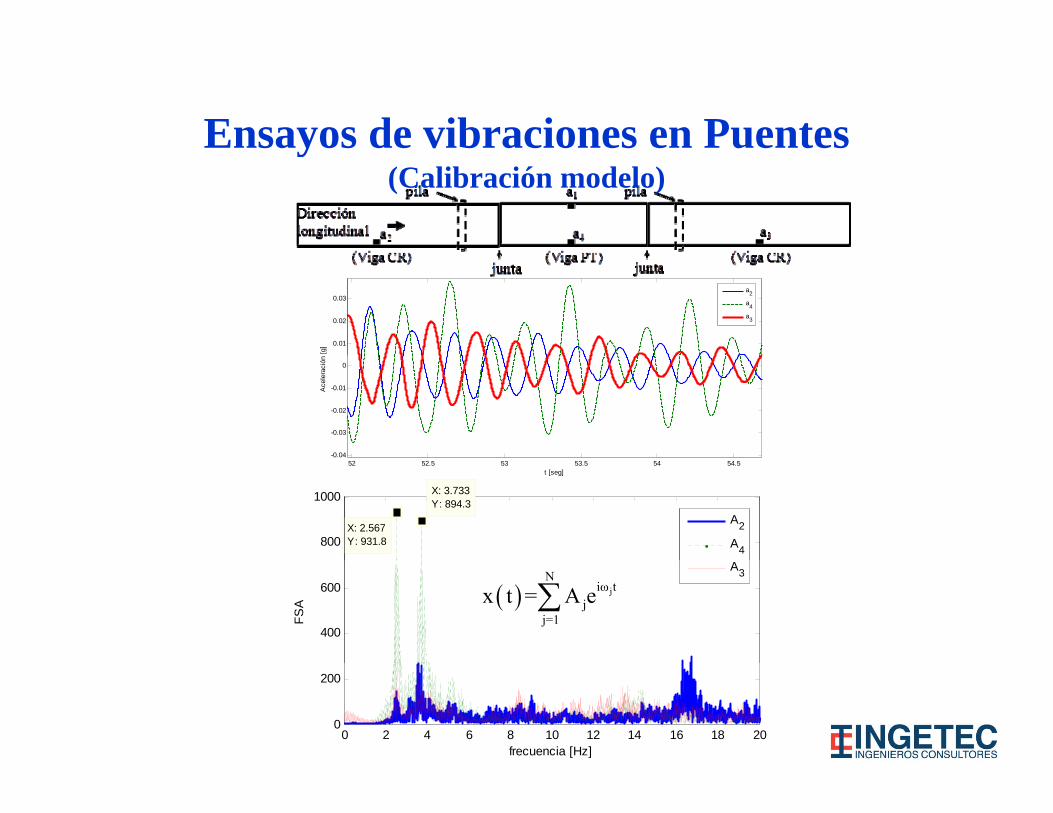
Ensayos de vibraciones en Puentes y(Calibración modelo)
0.01
0.02
0.03
[g]
a2
a4
a3
-0.04
-0.03
-0.02
-0.01
0
Ace
lera
ción
52 52.5 53 53.5 54 54.5t [seg]
800
1000
X: 2.567Y: 931.8
X: 3.733Y: 894.3
A2
A4
400
600
FSA
A3
jN
iω tj
j=1
x t = A e
0 2 4 6 8 10 12 14 16 18 200
200
frecuencia [Hz]
Ensayos de vibraciones en Puentes (Calibración modelo)
400
600
800
1000
FSA
X: 2.567Y: 931.8
X: 3.733Y: 894.3
A2
A4A3 j
Niω t
jj=1
x t = A e
0 2 4 6 8 10 12 14 16 18 200
200
frecuencia [Hz]
6
8x 10-3
Ensayo 10A
a2
a4
0
2
4
Ace
l. [g
]
X: 20.96Y: 0.001606X: 20.96Y: 0.001192
X: 20.57Y: 0.001798 X: 21.73
Y: 0.001363
a3
-6
-4
-2
X: 20.95Y: -0.007568
A
20.6 20.8 21 21.2 21.4 21.6 21.8-8
t [seg]
Señal filtrada para f < 3.2Hz
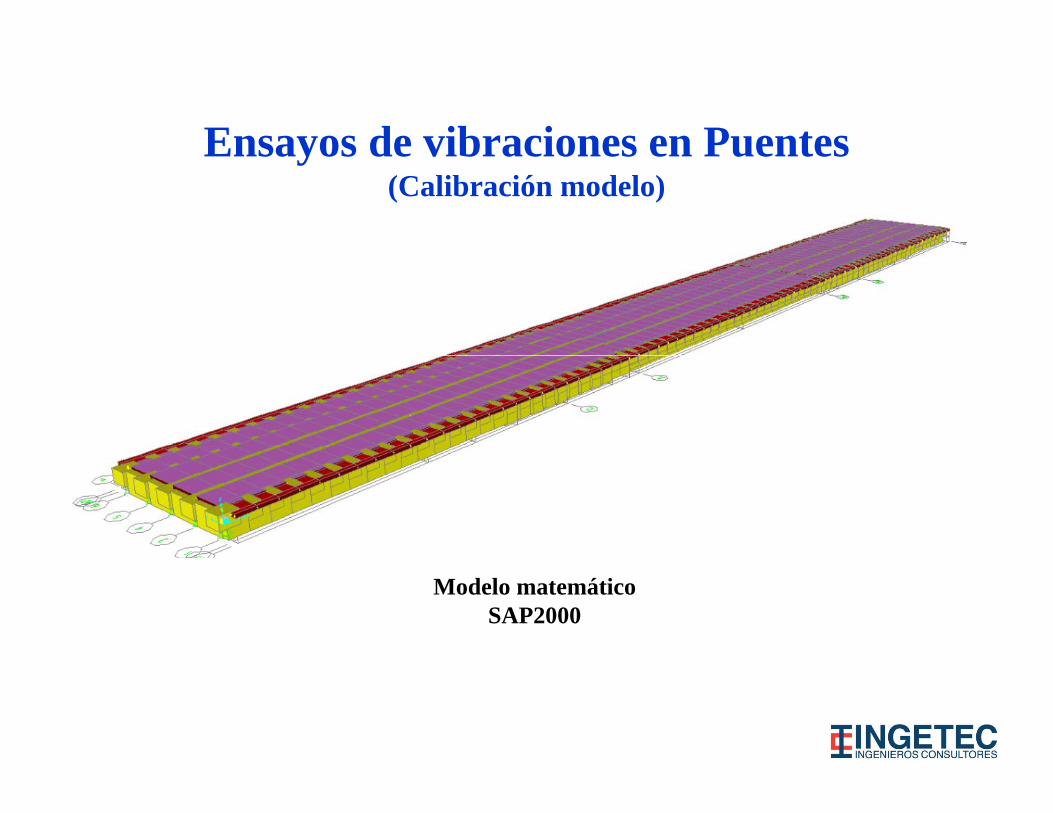
Ensayos de vibraciones en PuentesEnsayos de vibraciones en Puentes (Calibración modelo)
Modelo matemático SAP2000
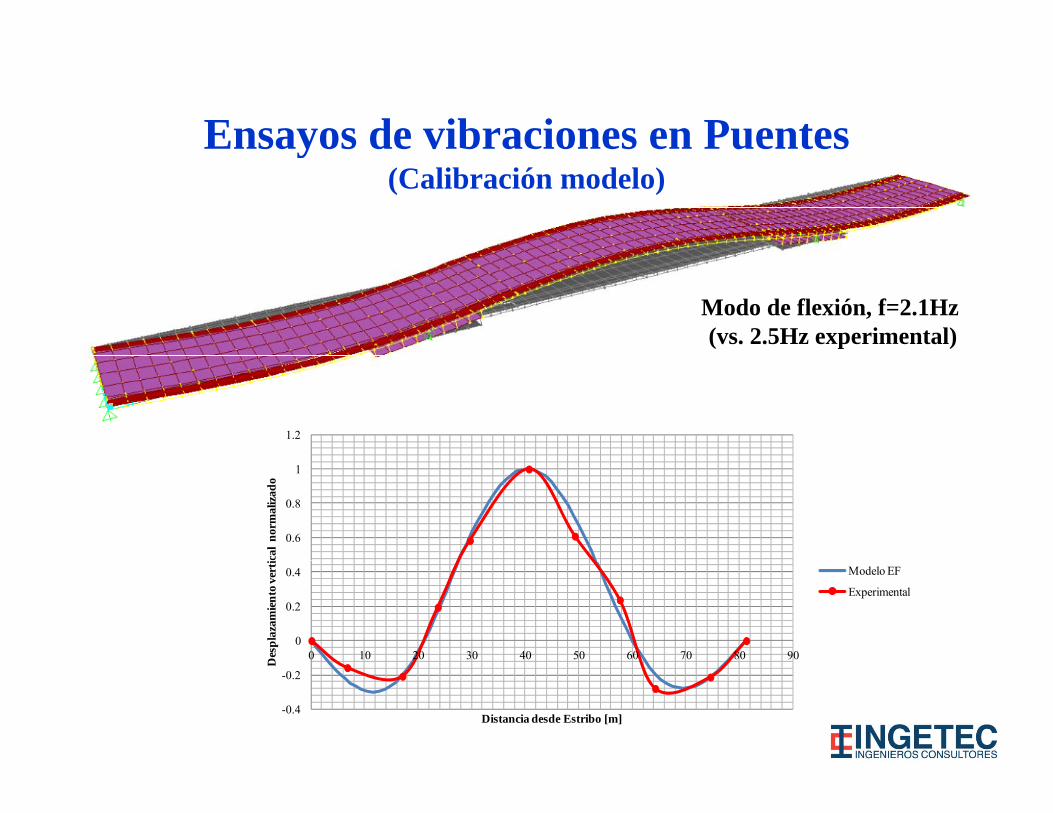
Ensayos de vibraciones en Puentes y(Calibración modelo)
Modo de flexión, f=2.1Hz(vs. 2.5Hz experimental)
1.2
Comparación de primera forma modal - Costado Este
0.6
0.8
1
ical
nor
mal
izad
o
0
0.2
0.4
0 10 20 30 40 50 60 70 80 90Des
plaz
amie
nto
vert
i
Modelo EF
Experimental
-0.4
-0.2
D
Distancia desde Estribo [m]
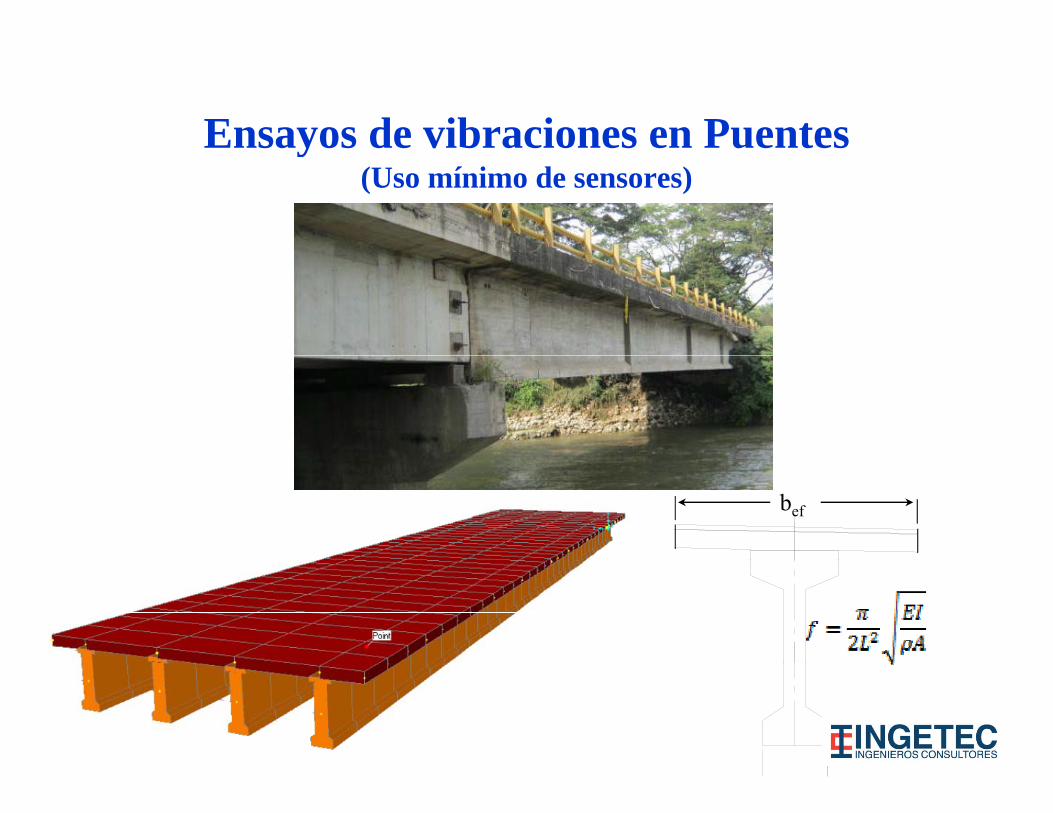
Ensayos de vibraciones en Puentes y(Uso mínimo de sensores)
bef
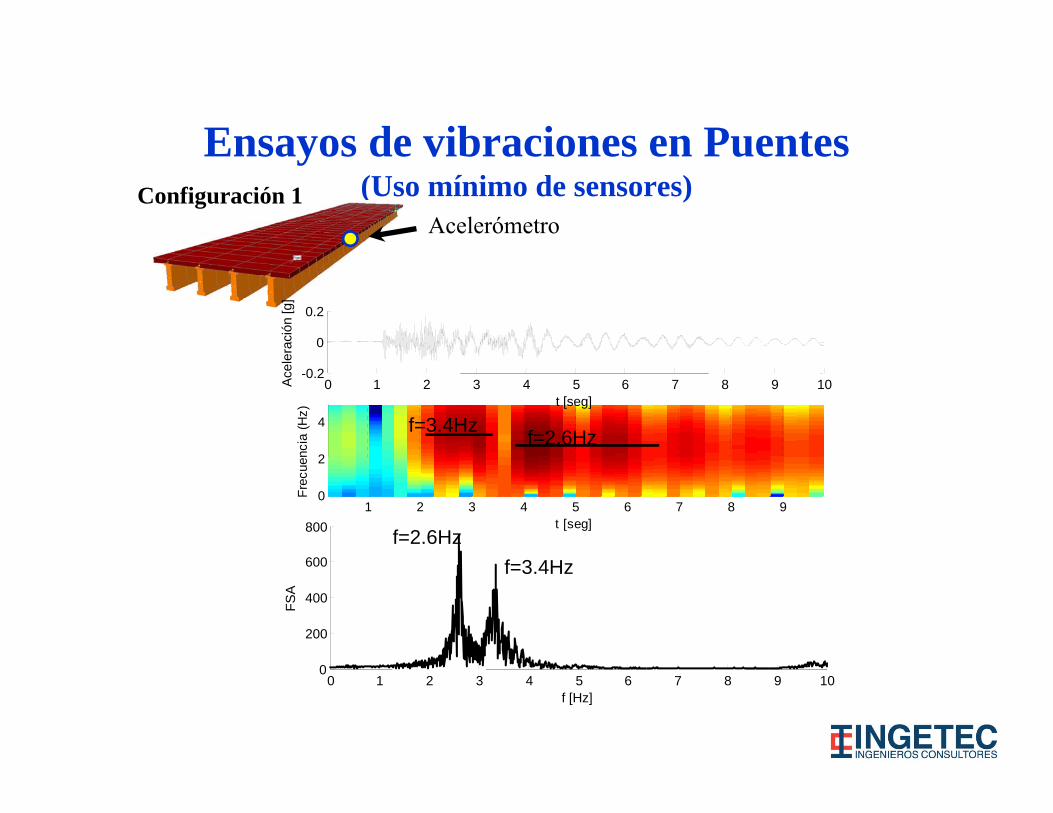
Ensayos de vibraciones en PuentesEnsayos de vibraciones en Puentes (Uso mínimo de sensores)
AcelerómetroConfiguración 1
0
0.2
erac
ión
[g]
2
4
ncia
(Hz)
0 1 2 3 4 5 6 7 8 9 10-0.2
t [seg]
Ace
le
f=3.4Hz f=2.6Hz
1 2 3 4 5 6 7 8 90
2
t [seg]
Frec
ue
600
800 f=2.6Hzf 3 4H
200
400
600
FSA
f=3.4Hz
0 1 2 3 4 5 6 7 8 9 100
f [Hz]
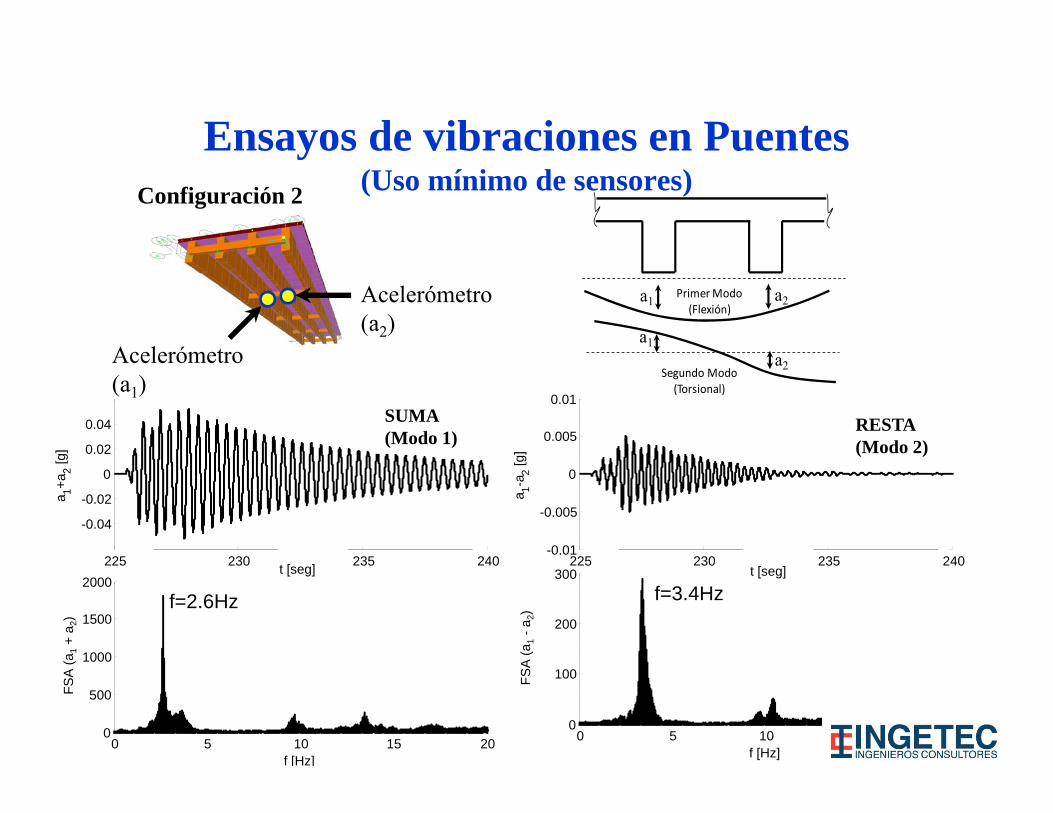
Ensayos de vibraciones en PuentesEnsayos de vibraciones en Puentes (Uso mínimo de sensores)Configuración 2
Acelerómetro (a2)
Acelerómetro
Primer Modo(Flexión)
a1 a2
a1Acelerómetro (a1)
Segundo Modo(Torsional)
a2
0.02
0.04
g]
0.005
0.01
g]
SUMA(Modo 1)
RESTA(Modo 2)
225 230 235 240
-0.04
-0.02
0
a 1+a2
[g
225 230 235 240-0.01
-0.005
0
a 1-a2
[g
225 230 235 240 225 230 235 240
1000
1500
2000
(a1
+ a 2
)
f=2.6Hz200
300f=3.4Hz
A (a
1-a
2)
t [seg] t [seg]
0 5 10 15 200
500
f [Hz]
FSA
(
0 5 10 15 200
100
f [Hz]
FSA
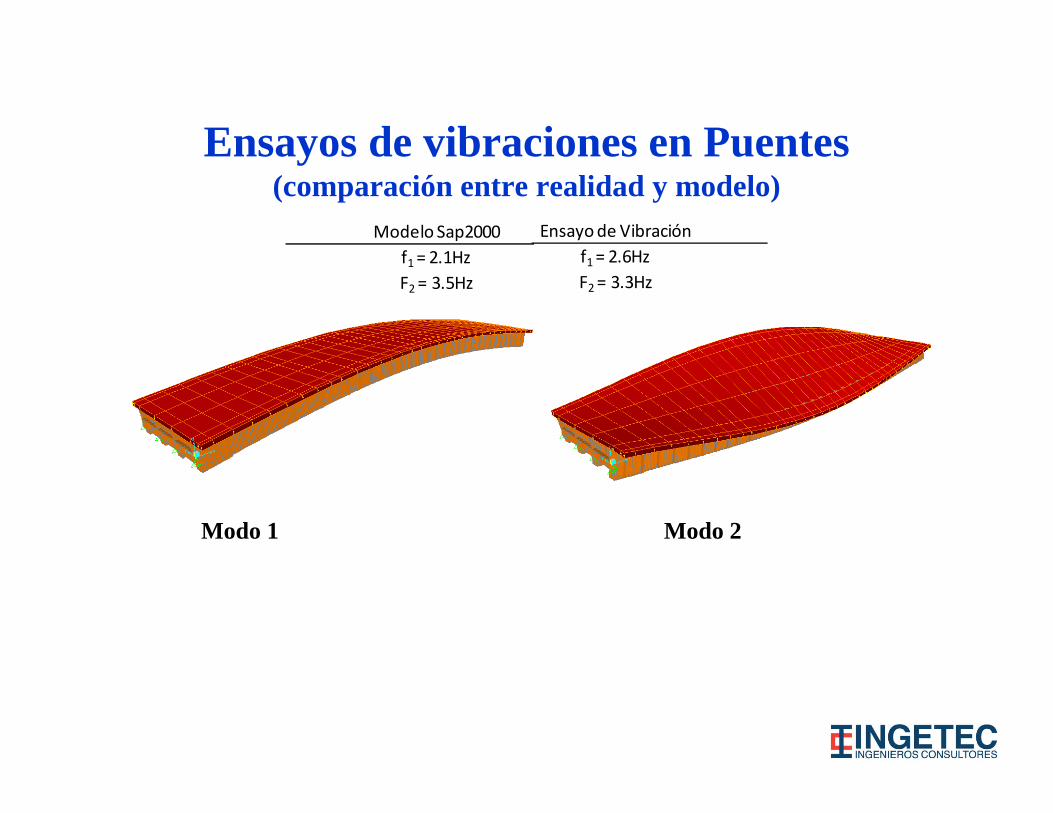
Ensayos de vibraciones en PuentesEnsayos de vibraciones en Puentes (comparación entre realidad y modelo)
Modelo Sap2000f 2 1H
Ensayo de Vibraciónf 2 6Hf1= 2.1Hz
F2= 3.5Hzf1= 2.6HzF2= 3.3Hz
Modo 1 Modo 2
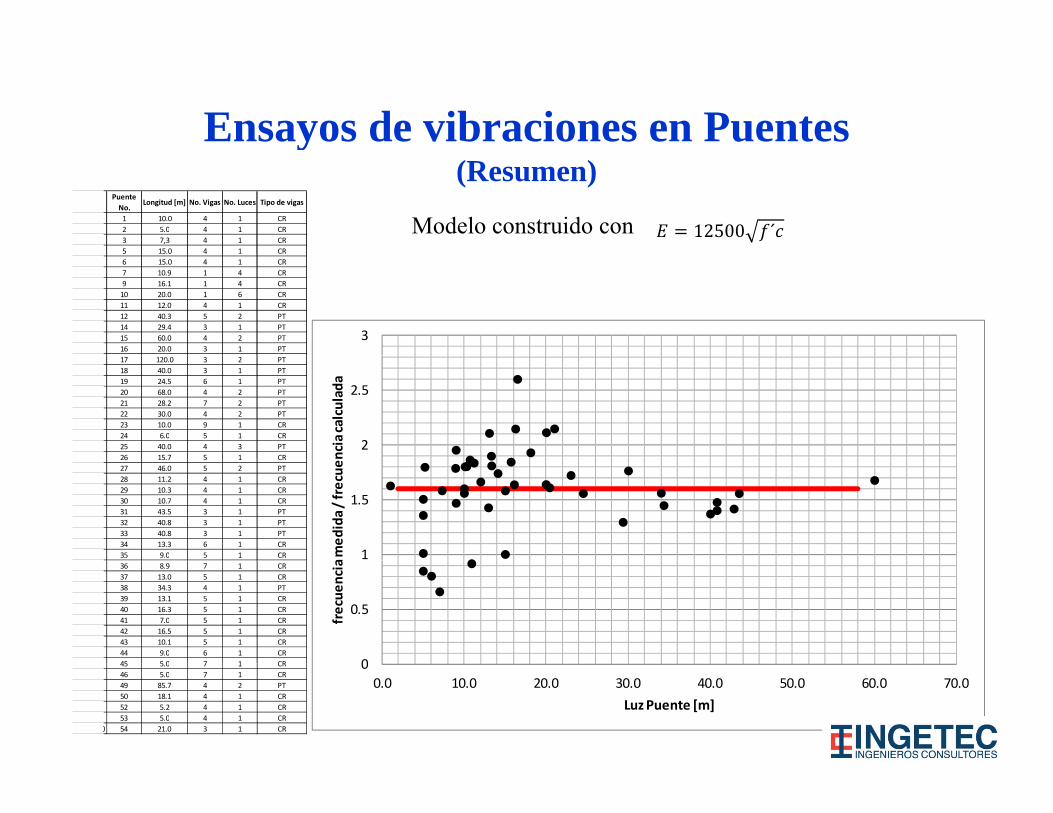
Ensayos de vibraciones en Puentes y(Resumen)
Puente No.
Longitud [m] No. Vigas No. Luces Tipo de vigas
1 10.0 4 1 CR2 5.0 4 1 CR3 7,3 4 1 CR5 15.0 4 1 CR
Modelo construido con 12500 ´5 15.0 4 1 CR6 15.0 4 1 CR7 10.9 1 4 CR9 16.1 1 4 CR10 20.0 1 6 CR11 12.0 4 1 CR12 40.3 5 2 PT14 29.4 3 1 PT15 60.0 4 2 PT16 20.0 3 1 PT
317 120.0 3 2 PT18 40.0 3 1 PT19 24.5 6 1 PT20 68.0 4 2 PT21 28.2 7 2 PT22 30.0 4 2 PT23 10.0 9 1 CR24 6.0 5 1 CR25 40.0 4 3 PT26 15 7 5 1 CR
2
2.5
ncia calculada
26 15.7 5 1 CR27 46.0 5 2 PT28 11.2 4 1 CR29 10.3 4 1 CR30 10.7 4 1 CR31 43.5 3 1 PT32 40.8 3 1 PT33 40.8 3 1 PT34 13.3 6 1 CR35 9.0 5 1 CR 1
1.5
a med
ida /
frecue
n
36 8.9 7 1 CR37 13.0 5 1 CR38 34.3 4 1 PT39 13.1 5 1 CR40 16.3 5 1 CR41 7.0 5 1 CR42 16.5 5 1 CR43 10.1 5 1 CR44 9.0 6 1 CR45 5 0 7 1 CR 0
0.5
frecue
ncia
45 5.0 7 1 CR46 5.0 7 1 CR49 85.7 4 2 PT50 18.1 4 1 CR52 5.2 4 1 CR53 5.0 4 1 CR
0 54 21.0 3 1 CR
00.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0
Luz Puente [m]
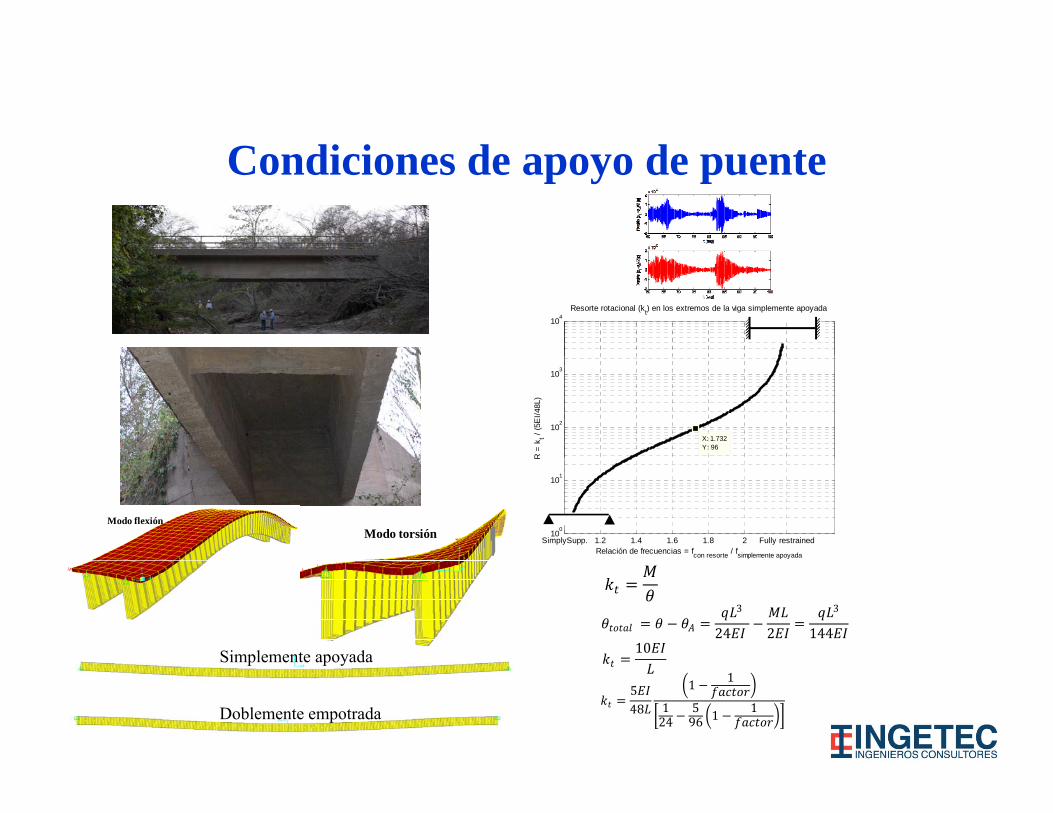
C di i d d tCondiciones de apoyo de puente
104Resorte rotacional (kt) en los extremos de la viga simplemente apoyada
102
103
R =
kt /
(5E
I/48L
)
X: 1.732Y: 96
Modo torsión SimplySupp. 1.2 1.4 1.6 1.8 2 Fully restrained100
101
Relación de frecuencias = fcon resorte / fsimplemente apoyada
R
Modo flexión
3
24 2
3
14410Simplemente apoyada
548
1 1
124
596 1 1
p p y
Doblemente empotrada
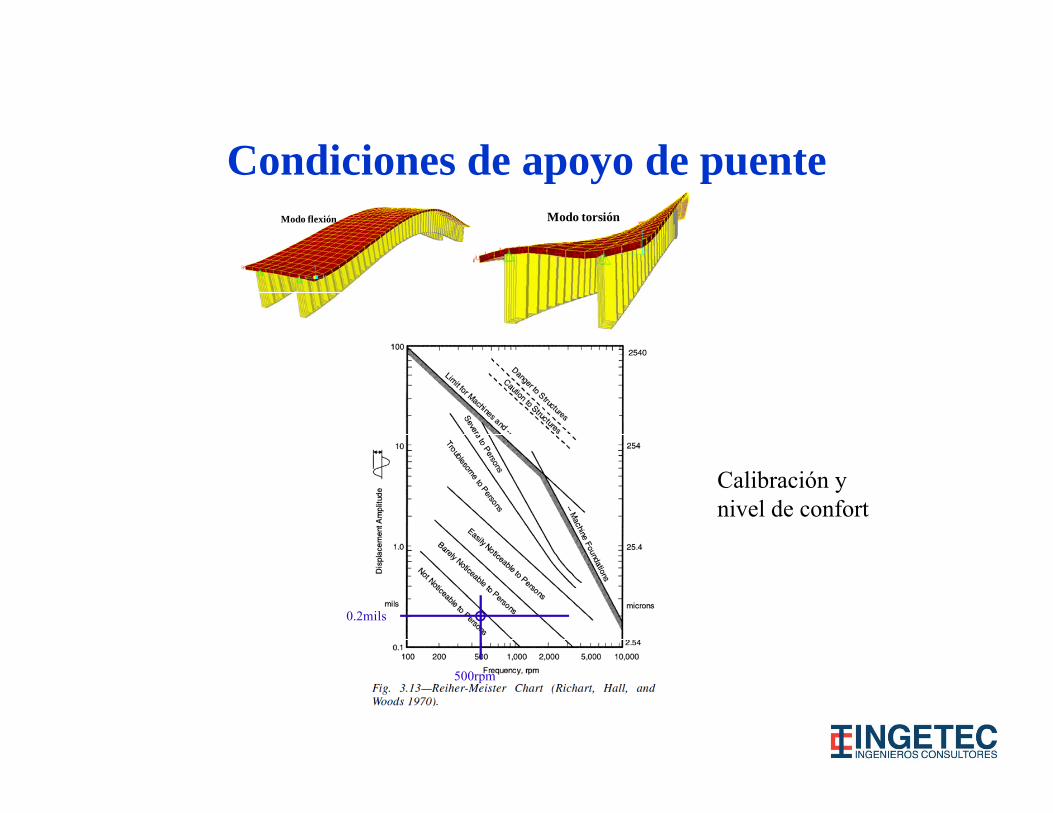
C di i d d tCondiciones de apoyo de puenteModo torsiónModo flexión
Calibración y nivel de confort
0.2mils
500rpm
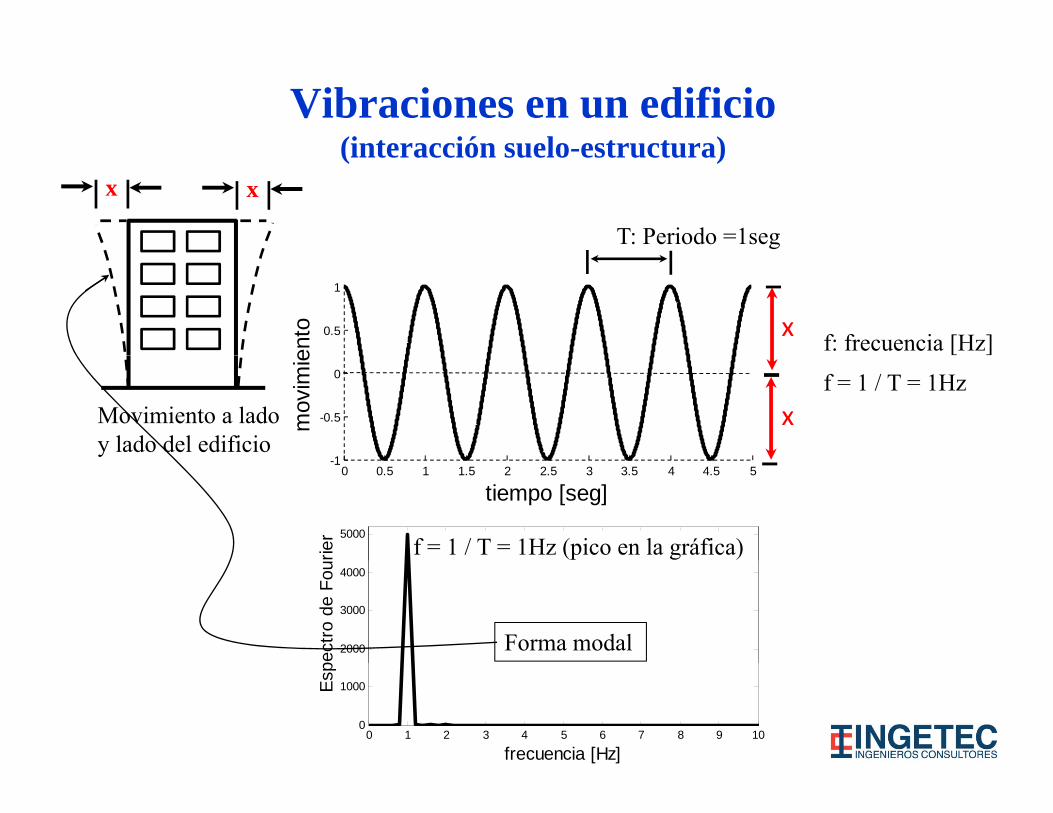
Vibraciones en un edificio(interacción suelo-estructura)
x x
T: Periodo =1seg
(interacción suelo-estructura)
x0.5
1en
to f: frecuencia [Hz]
Movimiento a lado y lado del edificio
x1
-0.5
0
mov
imie
f = 1 / T = 1Hz
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-1
tiempo [seg]5000
rier f = 1 / T = 1Hz (pico en la gráfica)
2000
3000
4000
pect
ro d
e Fo
u
Forma modal
0 1 2 3 4 5 6 7 8 9 100
1000
frecuencia [Hz]
Esp
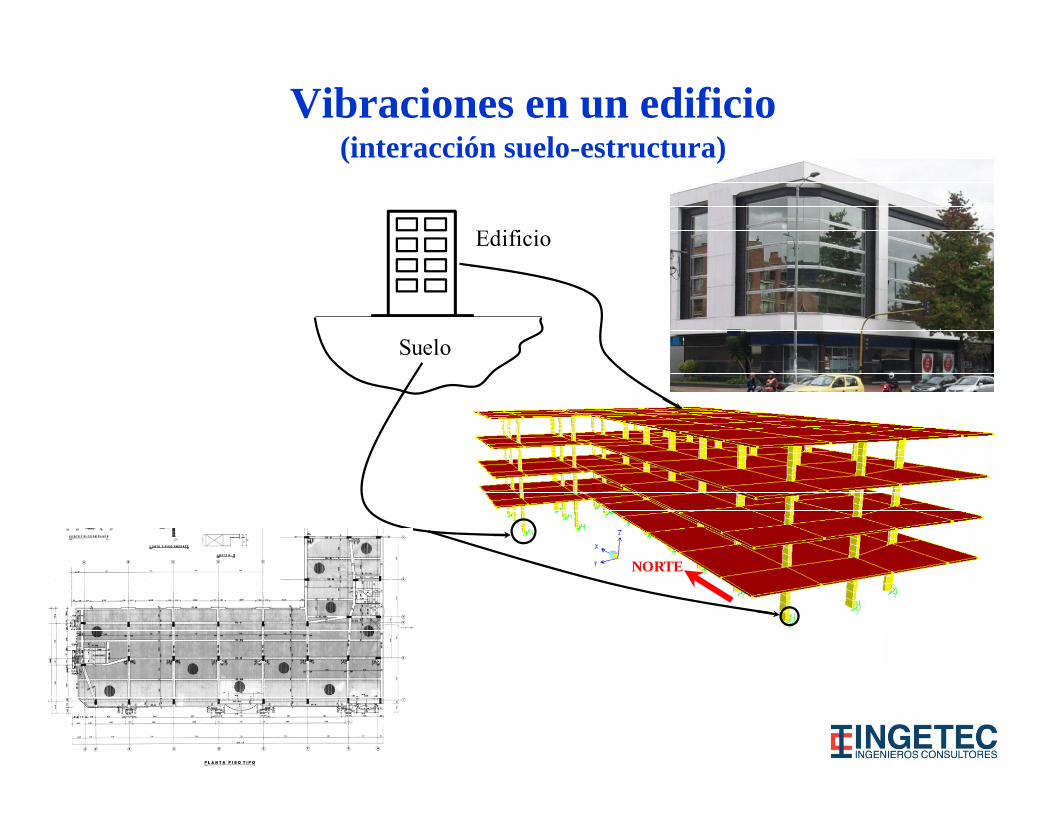
Vibraciones en un edificio(interacción suelo-estructura)
Edificio
(interacción suelo-estructura)
Suelo
NORTE
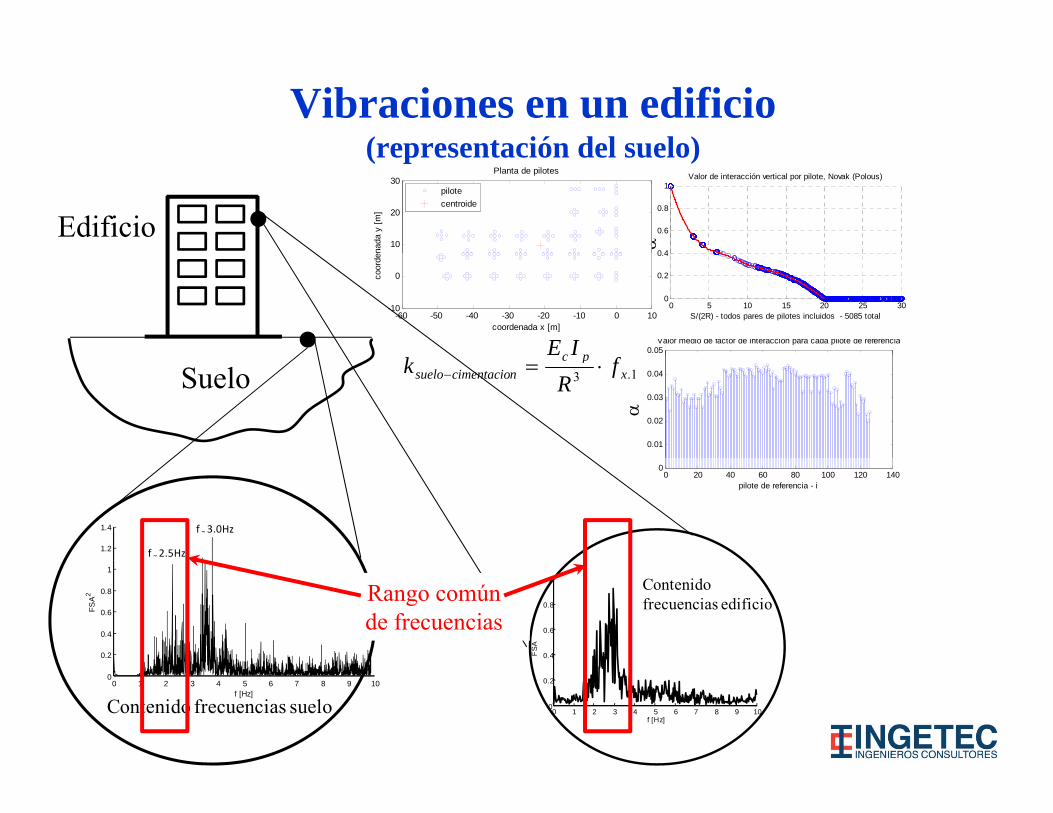
Vibraciones en un edificio(representación del suelo)
0 4
0.6
0.8
1
Valor de interacción vertical por pilote, Novak (Polous)
10
20
30
nada
y [m
]
Planta de pilotes
pilotecentroide
(representación del suelo)
Edificio
0 5 10 15 20 25 300
0.2
0.4
S/(2R) - todos pares de pilotes incluidos - 5085 total
0.05Valor medio de factor de interacción para cada pilote de referencia
-60 -50 -40 -30 -20 -10 0 10-10
0
coordenada x [m]
coor
de
pc IE
0.01
0.02
0.03
0.04
1.3 xpc
ncimentaciosuelo fR
k Suelo
0 20 40 60 80 100 120 1400
pilote de referencia - i
f ~ 2.5Hz
f ~ 3.0Hz
1.2
1.4
0.4
0.6
0.8
1
FSA
Contenido frecuencias edificio
0.2
0.4
0.6
0.8
1
FSA
2 Rango común de frecuencias
0 1 2 3 4 5 6 7 8 9 100
0.2
f [Hz]
0 1 2 3 4 5 6 7 8 9 100
f [Hz]
Contenido frecuencias suelo
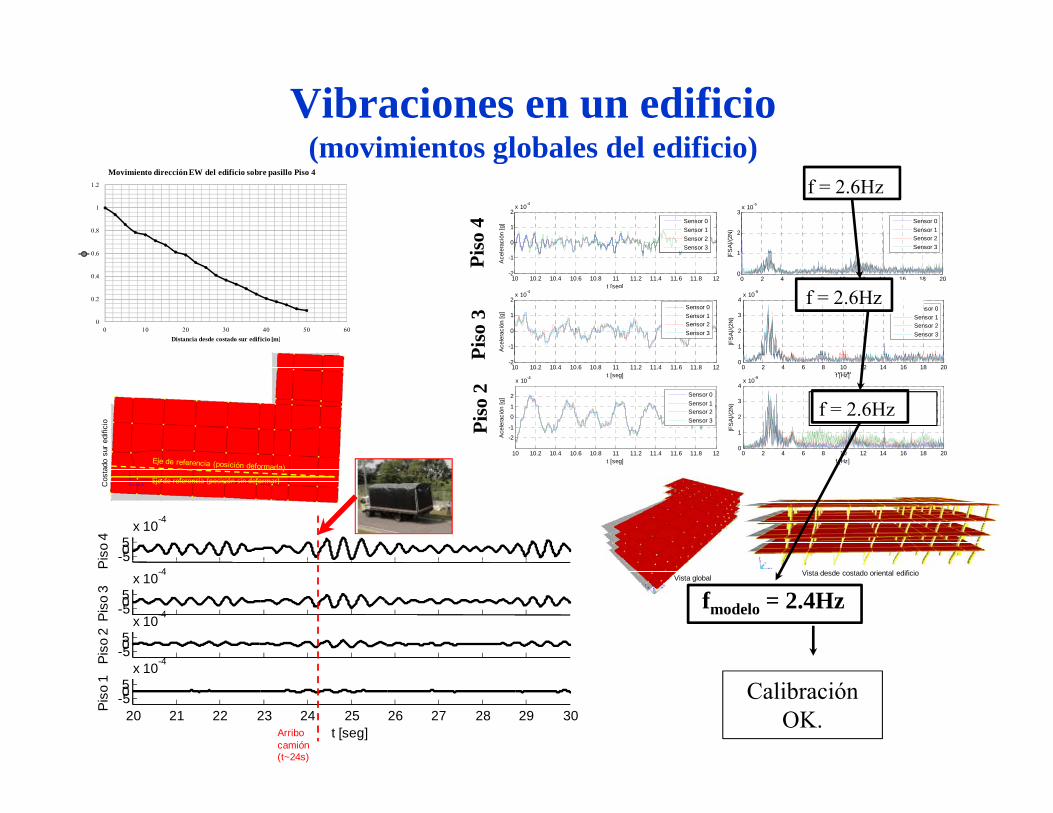
Vibraciones en un edificio(movimientos globales del edificio)
0 6
0.8
1
1.2
Movimiento dirección EW del edificio sobre pasillo Piso 4
(movimientos globales del edificio)
0
1
2x 10-4
lera
ción
[g]
Sensor 0Sensor 1Sensor 2Sensor 3
1
2
3x 10-6
FSA
|/(2N
)
Sensor 0Sensor 1Sensor 2Sensor 3
f = 2.6Hz
iso
4
0
0.2
0.4
0.6
0 10 20 30 40 50 60
Distancia desde costado sur edificio [m]
10 10.2 10.4 10.6 10.8 11 11.2 11.4 11.6 11.8 12-2
-1
t [seg]
Ace
-1
0
1
2x 10-4
Ace
lera
ción
[g]
Sensor 0Sensor 1Sensor 2Sensor 3
0 2 4 6 8 10 12 14 16 18 200
1
f [Hz]
|F
t [seg]
1
2
3
4x 10-6
|FS
A|/(
2N)
Sensor 0Sensor 1Sensor 2Sensor 3
f = 2.6Hz
PiPi
so 3
sure
dific
io
10 10.2 10.4 10.6 10.8 11 11.2 11.4 11.6 11.8 12-2
t [seg]
10 10.2 10.4 10.6 10.8 11 11.2 11.4 11.6 11.8 12
-2
-1
0
1
2
x 10-4
Ace
lera
ción
[g]
Sensor 0Sensor 1Sensor 2Sensor 3
0 2 4 6 8 10 12 14 16 18 200
f [Hz]
t [seg]
0 2 4 6 8 10 12 14 16 18 200
1
2
3
4x 10-6
|FS
A|/(
2N)
Sensor 0Sensor 1Sensor 2Sensor 3
f = 2.6Hz
PPi
so 2
fNS ~ 2.4HzEje de referencia (posición sin deformar)Cos
tado t [seg] f [Hz]
-505
x 10-4
iso
4
Vista globalVista desde costado oriental edificio
fmodelo = 2.4Hz
5P
-505
x 10-4
Piso
3
-505
x 10-4
Piso
2
-4
Calibración OK.
P
20 21 22 23 24 25 26 27 28 29 30-505
x 10 4
Piso
1
t [seg]Arribocamión(t~24s)
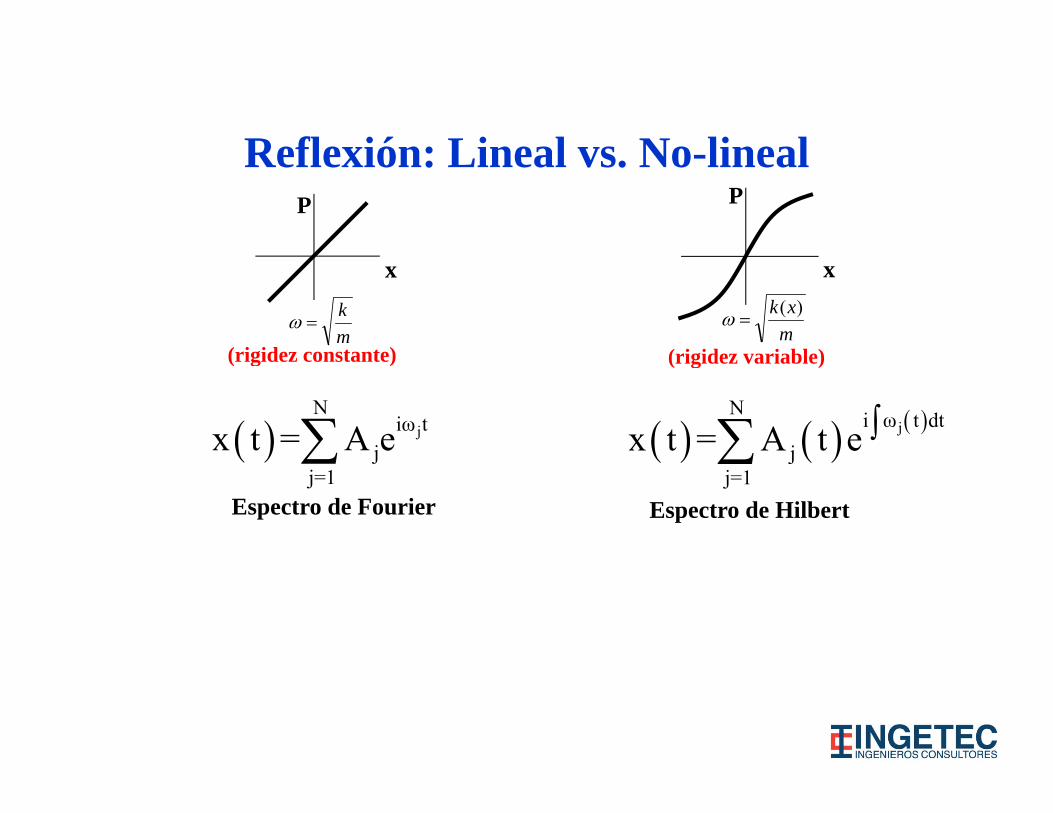
Reflexión: Lineal vs No linealP P
Reflexión: Lineal vs. No-lineal
(rigidez constante)
x x
(rigidez variable)mk
mxk )(
(rigidez constante) (rigidez variable)
jN
iω tjx t = A e j
N i ω t dtjx t = A t e j
j=1
Espectro de Fourier
jj=1
Espectro de Hilbert
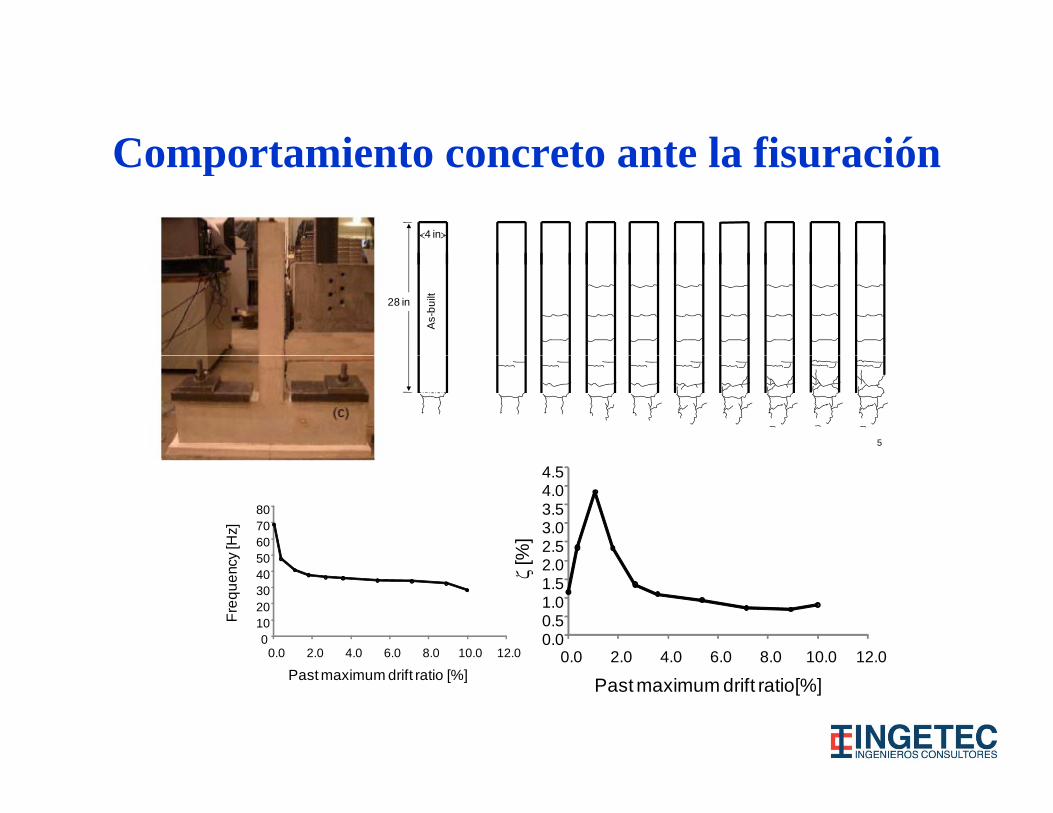
Comportamiento concreto ante la fisuraciónComportamiento concreto ante la fisuración4 in
28 in
As-
built
5
50607080
cy [H
z]
2 02.53.03.54.04.5
[%]
01020304050
0.0 2.0 4.0 6.0 8.0 10.0 12.0
Freq
uenc
0.00.51.01.52.0
0.0 2.0 4.0 6.0 8.0 10.0 12.0
[
Past maximum drift ratio [%] Past maximum drift ratio[%]
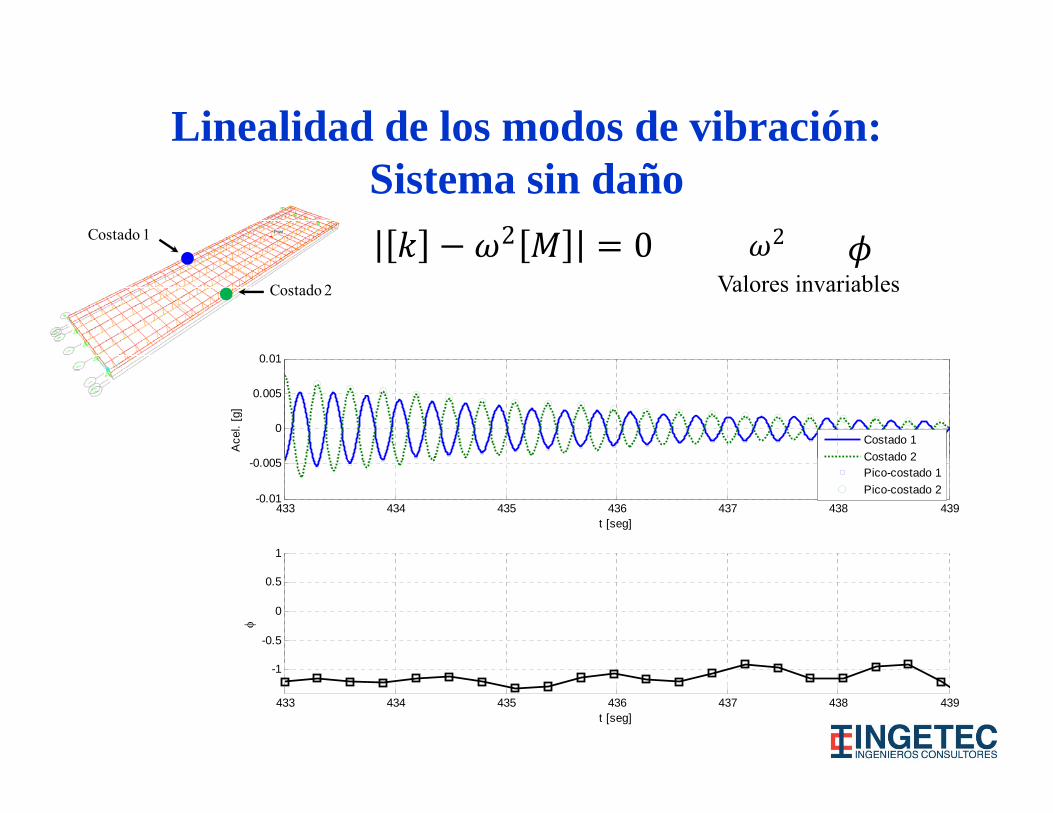
Linealidad de los modos de vibración:
Costado 1
Sistema sin daño2 2
Costado 2
0 01
Valores invariables
0
0.005
0.01
Ace
l. [g
]
Costado 1Costado 2
433 434 435 436 437 438 439-0.01
-0.005
t [seg]
1
Costado 2Pico-costado 1Pico-costado 2
-0.5
0
0.5
433 434 435 436 437 438 439
-1
t [seg]
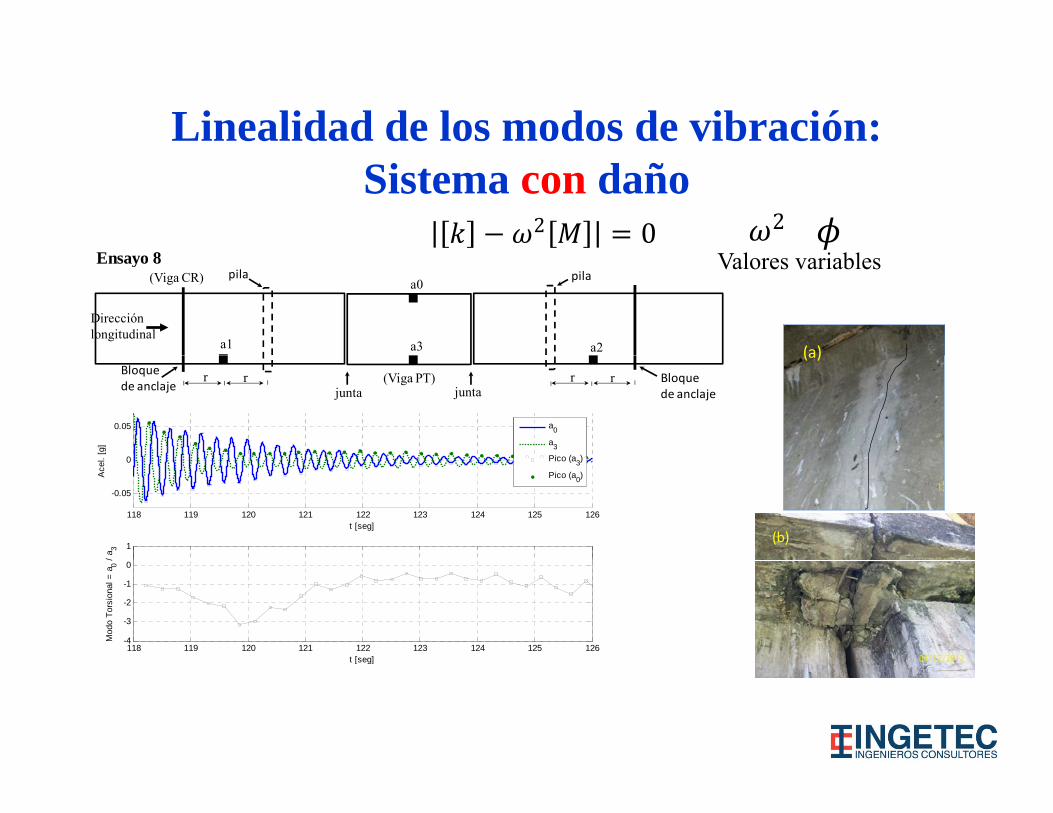
Linealidad de los modos de vibración: Sistema con daño
| 2 | 0 2E 8 l i blEnsayo 8
a1
Direcciónlongitudinal
(Viga CR) pila
a3 a2
a0 pila
(a)
Valores variables
junta junta(Viga PT)rBloque
de anclajer rr Bloque
de anclaje
0
0.05
[g]
a0
a3Pico (a )
(a)
1
/ a3
118 119 120 121 122 123 124 125 126
-0.05
0
t [seg]
Ace
l.
Pico (a3)
Pico (a0)
(b)
118 119 120 121 122 123 124 125 126-4
-3
-2
-1
0
t [seg]
Mod
o To
rsio
nal =
a0 /
[ g]
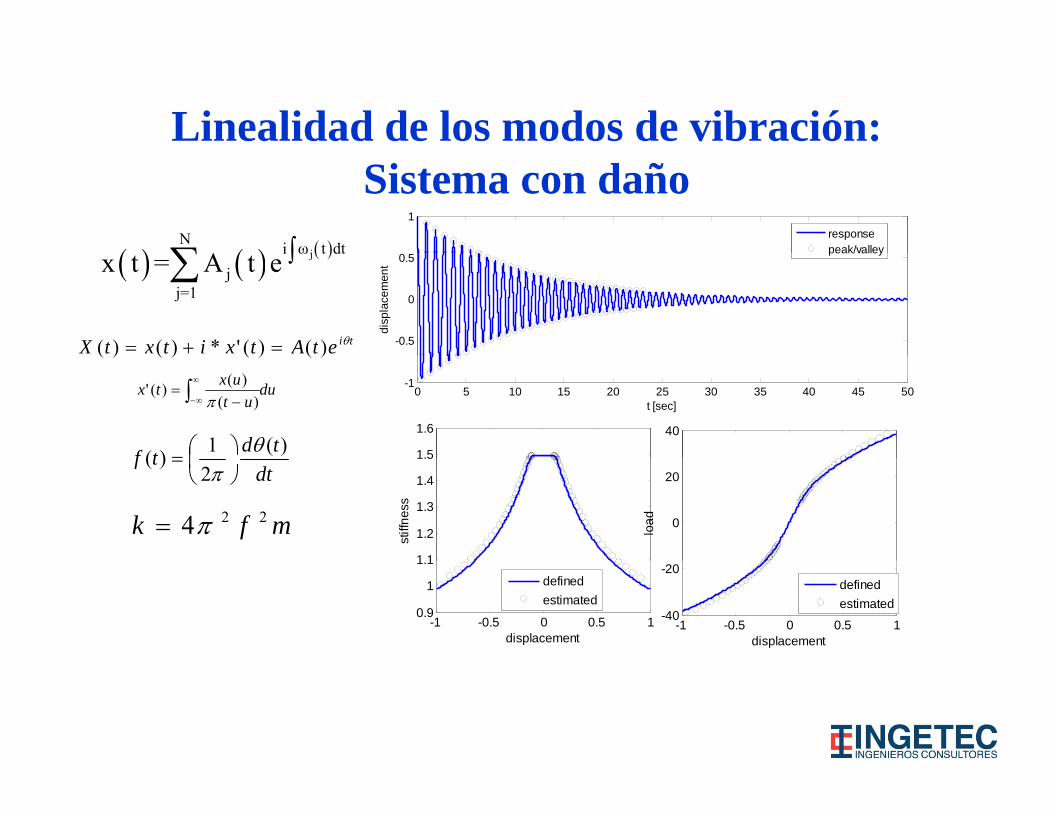
Linealidad de los modos de vibración: Sistema con daño
jN i ω t dt
1
responsepeak/valley ji ω t dt
jj=1
x t = A t e
-0.5
0
0.5
disp
lace
men
t
peak/valley
tietAtxitxtX )()('*)()(
0 5 10 15 20 25 30 35 40 45 50-1
t [sec]
1.5
1.6 40
)()()()(
duut
uxtx
)()()('
tdtf )(1)(
1 1
1.2
1.3
1.4
1.5
stiff
ness
0
20
load
dttf
2)(
mfk 224
-1 -0.5 0 0.5 10.9
1
1.1
displacement
definedestimated
-1 -0.5 0 0.5 1-40
-20
displacement
definedestimated
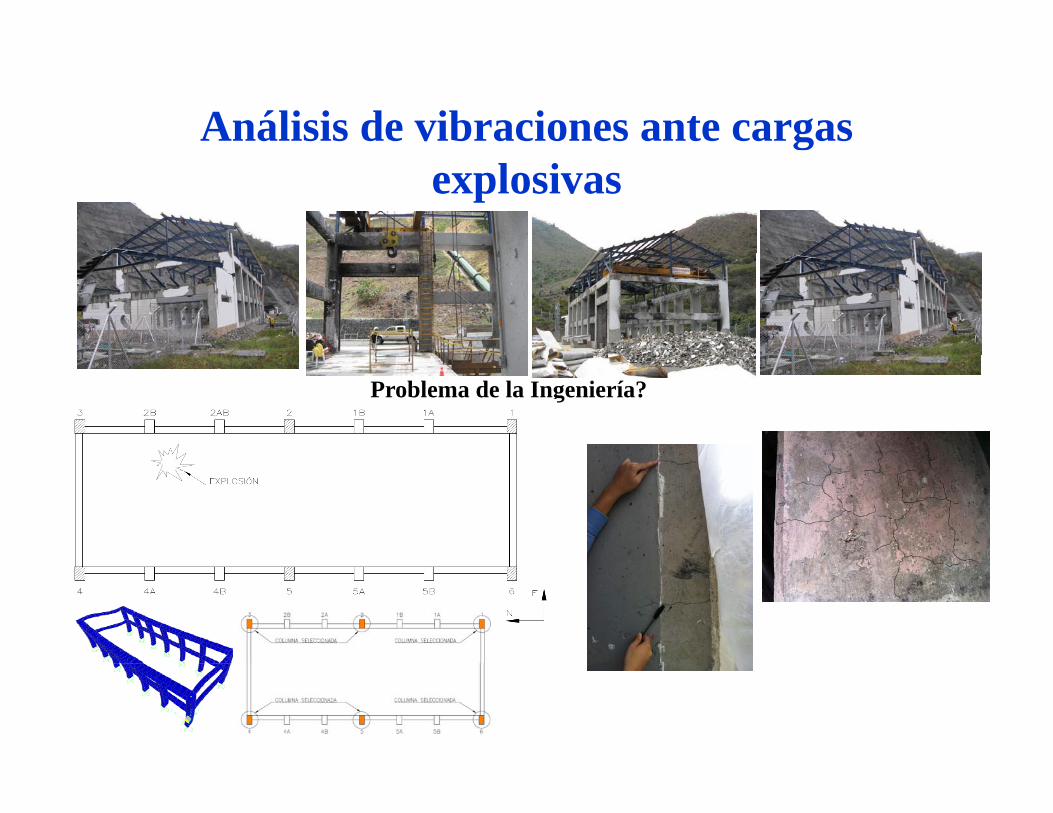
Análisis de vibraciones ante cargas explosivas
Problema de la Ingeniería?
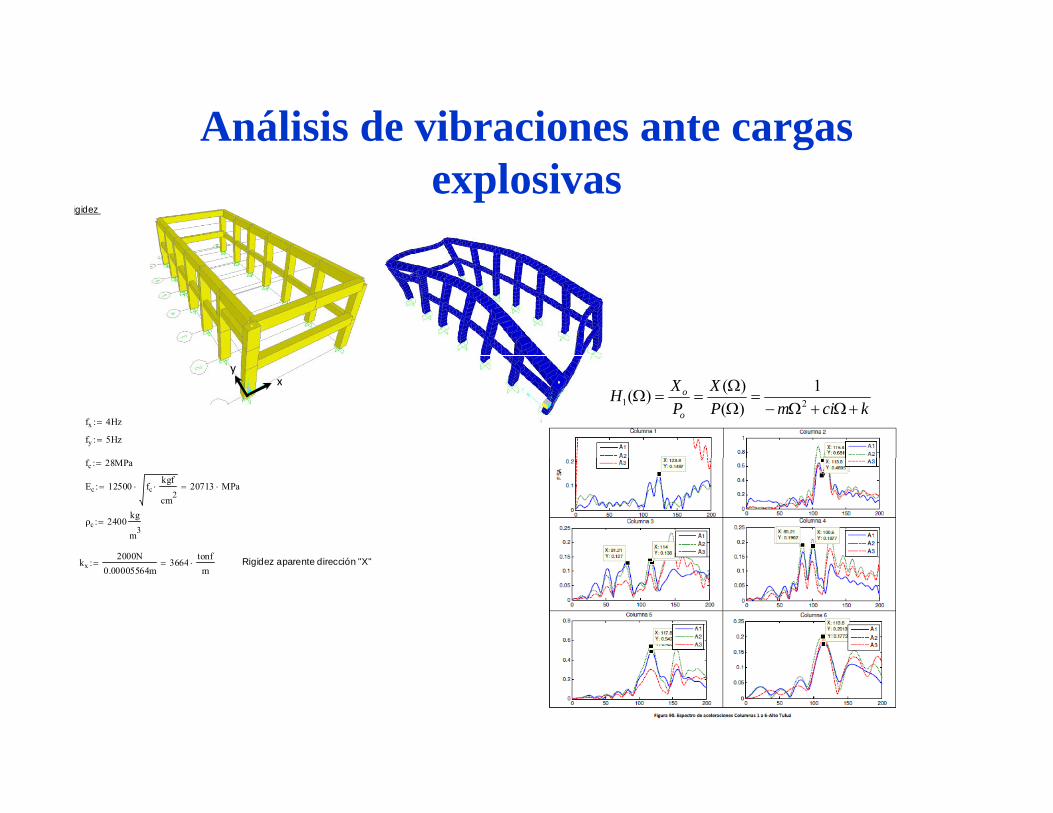
Análisis de vibraciones ante cargas explosivas
igidez
xy
fx 4Hz
fy 5Hz
kcimPX
PXH
o
o
211
)()()(
fc 28MPa
Ec 12500 fckgf
cm2 20713 MPa
ρc 2400kg
m3
k2000N
3664tonf Rigidez aparente dirección "X"kx 0.00005564m
3664m
Rigidez aparente dirección X
ConclusionesConclusiones
- Caracterización dinámica de las estructuras mediante vibraciones
-Calibración de un modelo matemático con observaciones experimentales
-Entre las capacidades de la metodología está: estimar el Módulo de elasticidad dinámico; condiciones de borde; minimizar la cantidad de sensores; establecer la condición de daño.
-Entender la dinámica de las estructuras
-Comportamiento no-lineal elástico presente en las estructuras incluso en condiciones sin daño-Fourier (frecuencia constante) vs Hilbert (frecuencia variable)Fourier (frecuencia constante) vs. Hilbert (frecuencia variable)





























