Embed Size (px)
Citation preview

Experimental System for Predicting Shelf-Slope Optics (ESPreSSO):
Assimilating ocean color data using an iterative ensemble smoother:
skill assessment for a suite of dynamical and error models
Dennis McGillicuddyKeston Smith

Ocean color assimilation as a solution to the cloudiness problem
State estimation (compositing)Process studies
SW06 data – Gawarkiewicz et al.

Methodology
cyxR
yxScDcvt
c
),(
),(
0
Forward model (2-D):
c: surface layer (20m) chlorophyll concentrationv: velocity provided by hydrodynamic modelD: diffusivity, 10 m s-2
S(x,y), R(x,y): unknown source/sink terms
Data (d): trueHcd
H: linear measurement operatorη: measurement error
Approach: Utilize an ensemble (N=400) of Monte Carlo simulations to estimate initial conditions c(t0) and source/sink terms S(x,y), R(x,y)

Methodology cont’dBest prior estimate:
Initialize with (climatology)Source/sink term S(x,y)=0; R(x,y)=0
Posterior estimates of the ICs and source sink terms are
ctc )( 0
)()()( 00 iiciai HcdKtctc
)( iiRiai HcdKRR )( iiSi
ai HcdKSS
Gaussian perturbations about the best prior estimates of ci(t0), S(x,y), and R(x,y) lead to an ensemble of simulations
Kalman gain computed from Monte Carlo approximations to the covariance between the unknown parameters and the model prediction of the observations

Use of an explicit biological model
nppnDnvt
n
pnppDpvt
p
Phytoplankton:
Nutrients:
Satellite ocean color data samples the phytoplankton field:
Hpd

Model domains
Shelf-scale ROMS(9km resolution)He and Chen, submitted
Assimilationsubdomain
Region ofinterest

Mean of the prior initial conditions: MODIS climatology for August
Chlorophyll a – mg m-3

Velocity Field 9km ROMS time-mean for Jul 25-Sept 9

Results
Prior
RHS=0
RHS=S(x,y)
RHS=R(x,y)c
N-P model
Satellitedata
Ernesto
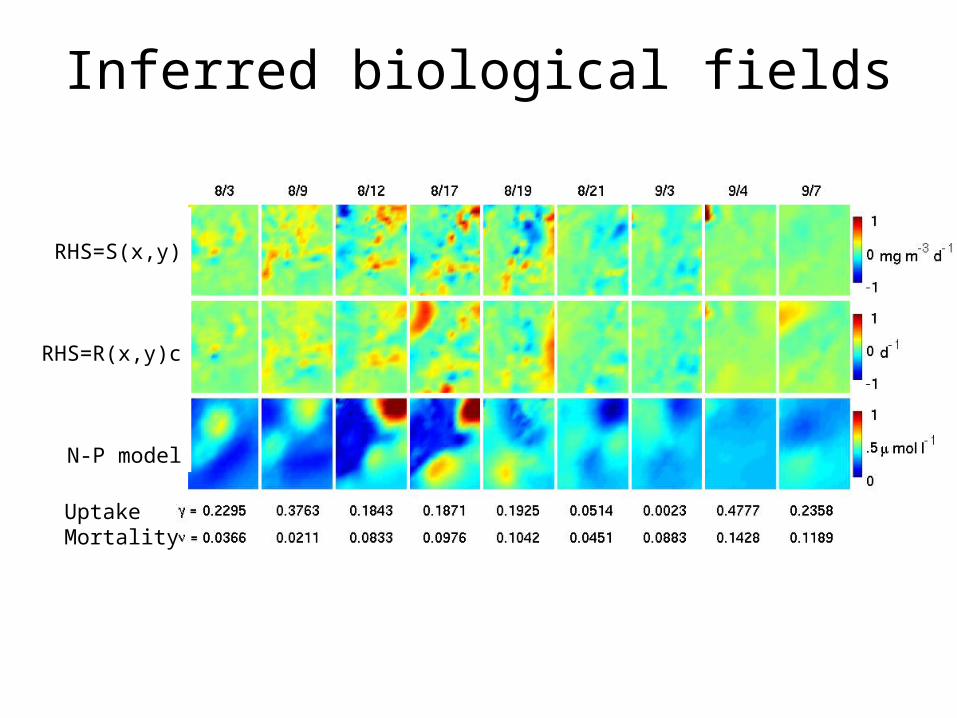
Inferred biological fields
RHS=S(x,y)
RHS=R(x,y)c
N-P model
UptakeMortality

Skill assessment: sensitivity to observational error
Observational error standard deviation
RM
S m
isfit
to
unas
sim
ilate
d da
tapassive
posteriorpassive
passiveprior
passive
dcH
dcHskill
ADR 43%ADS 36%NP 32%AD 18%

Comparisons with Gawarkiewicz in situ data

Comparisons with Gawarkiewicz in situ data
Year Day
Cor
rela
tion
Model vs. in situ
Model vs. satellite Satellite vs. in situ
Ernesto
ConclusionsEnsemble smoothing methodology shows promise
Goodness of fit depends ondata (amount, underlying phenomenology)parameters of the assimilation procedure λx, λobs, σobs
biological dynamics of the forward model
Future directionsapply to additional ESPreSSO / BIOSPACE field foci
in situ datahigher resolutiontime-dependent velocity fields
methodological developmentmore sophisticated bio-optical modelsjoint uncertainties in physics and biology
skill assessment

Extras
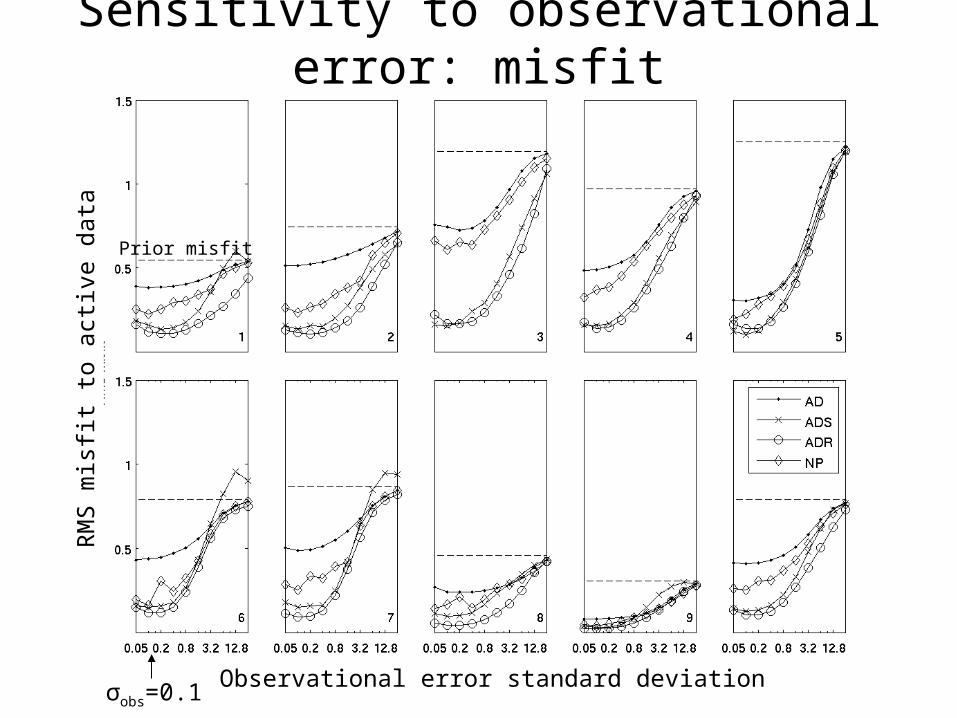
Sensitivity to observational error: misfit
Observational error standard deviation
RM
S m
isfit
to
activ
e da
ta Prior misfit
σobs=0.1

Necessity of an iterative approach

Methodology (3)Posterior estimates of the ICs and source sink terms are
)()()( 00 iiciai HcdKtctc
1)( WHPHHPK TTcc
obs
jiobsji
xxW
||exp2
,
Kalman gain computed from observational error covariance W and the ensemble covariances P, Pc, and PR
with
)( iiRiai HcdKRR
1)( WHPHHPK TTRR
km 25
m mg 1 32
obs
obs
)( iiSiai HcdKSS
1)( WHPHHPK TTSS
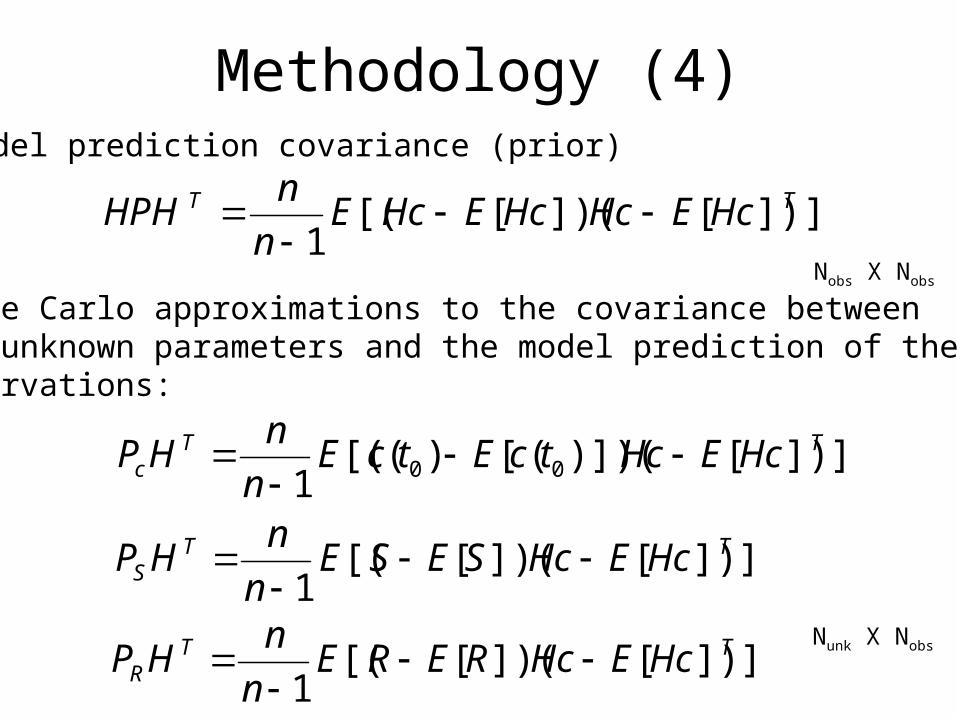
Methodology (4)Model prediction covariance (prior)
Monte Carlo approximations to the covariance betweenthe unknown parameters and the model prediction of theobservations:
]])[)])(([)([(1 00
TTc HcEHctcEtcE
n
nHP
]])[])([[(1
TTR HcEHcRERE
n
nHP
]])[])([[(1
TT HcEHcHcEHcEn
nHPH
Nobs X Nobs
Nunk X Nobs
]])[])([[(1
TTS HcEHcSESE
n
nHP
Methodology cont’dBest prior estimate:
Initialize with (climatology)Source/sink term S(x,y)=0; R(x,y)=0
Gaussian perturbations about the best prior estimates of ci(t0), S(x,y), and R(x,y) lead to an ensemble of simulations
Posterior estimates of the ICs and source sink terms are
ctc )( 0
)()()( 00 iiciai HcdKtctc
)( iiRiai HcdKRR )( iiSi
ai HcdKSS
Kalman gain computed from Monte Carlo approximations to the covariance between the unknown parameters and the model prediction of the observations





























