Embed Size (px)
Citation preview

EXPLORATIONS OF WIND INSTRUMENTS USING DIGITAL SIGNAL PROCESSING AND PHYSICAL MODELING TECHNIQUES
Matti Karjalainen1, Vesa Välimäki2, Bertrand Hernoux3, and Jyri Huopaniemi
Helsinki University of Technology, Laboratory of Acoustics and Audio Signal Processing Otakaari 5A, FIN-01250 Espoo, Finland
E-mail: [email protected], [email protected], [email protected]
ABSTRACT: In this paper we present a systematic approach to measure the acoustical behavior of tubes and wind instruments using digital signal processing techniques. This approach is related to physical modeling with digital waveguides and the measurement results may be used to calibrate such sound synthesis models. The focus of this study is on the linearly behaving portions of wind instruments. INTRODUCTION
Much of the literature on wind instrument acoustics is based on the traditional continuous-time analog approach which is valid but not as powerful for synthesis and measurement purposes as the discrete-time digital signal processing (DSP) approach. Physical modeling by DSP techniques, especially using digital waveguide filters (Smith 1992), has enabled real-time synthesis based on simplified models that represent the most essential features of the original instrument. Rethinking in terms of linear digital filters, nonlinear operations, and excitation sources helps as well to figure out how to precisely and efficiently measure and estimate the parameters of a synthesis model. This opens up new horizons, studied only partially so far, to explore wind instrument acoustics.
In this paper we first give a short introduction to digital waveguide modeling of wind instruments, as proposed in several recent papers. As main tools for measurements and analysis we formulate relatively straightforward yet not widely known mathematics of deconvolution (or inverse filtering) along with other related mathematical topics. The requirements for successful inverse filtering are discussed.
The next part of the study is devoted to basic techniques for acoustic tube measurements. Wave propagation, reflection, and radiation may be measured easily using a miniature impulse sound source and a pair of miniature electret microphones attached to various parts of a tube. Transfer functions or impulse responses are computed by deconvolving a response by a source reference signal. Careful windowing and estimation techniques are needed to separate the excitation and the response in a registered signal before deconvolution can be applied. By extending the bore of an instrument (e.g. by replacing the mouthpiece) by a known homogeneous tube, as proposed in (Agulló et al. 1995), the instrument may be studied by measurements made outside it. Finally we propose a method to have access to information inside an instrument during normal playing conditions based on signals registered outside it. DIGITAL WAVEGUIDE MODELING OF WIND INSTRUMENTS
The physical modeling approach to sound synthesis of musical instruments is typically based on digital waveguides (Smith 1992) that represent one or two-dimensional wave propagation. The longitudinal wave propagation inside a wind instrument bore can be formulated as a bidirectional delay line. For efficient implementation the losses and dispersion can be lumped at the termination ports or other points of interest such as the finger holes so that the remaining delay lines are ideal (lossless). Wave reflection at terminations, together with the elements lumped from the bore, are represented as digital filters. Sound radiation from the termination or finger holes can also be described as a digital filter. The excitation 1Visiting scholar to CCRMA, Stanford University (USA) 2Also with CARTES (Espoo, Finland) 3Compiègne University of Technology (France)

portion, such as a reed or the lips of a player, is a highly nonlinear subsystem, however. Figure 1 shows a schematic diagram of a generic wind instrument model.
Fig. 1. A generic wind instrument and its waveguide model. D is the delay due to wave propagation in the instrument
bore, and R(z) and T(z) are the reflection and radiation functions, respectively.
Recently there have been papers describing how the waveguide approach can be used for high-quality yet real-time synthesis on DSP processors, see e.g. (Smith 1986), (Cook 1988, 1991a), (Välimäki et al. 1992). In addition to simple cylindrical bore models there are advanced ways to include finger holes (Välimäki et al. 1993) and conical tube sections (Välimäki et al. 1994), see also (Välimäki 1994). There have been, however, only few attempts to study the acoustic instruments by measurements (Agulló et al. 1995) and estimation techniques (Cook 1991b), (Scavone 1994), in order to get data for calibrating the synthesis models. Here our aim is to formulate a methodological framework for such purposes and show a direction for further explorations. MATHEMATICAL CONCEPTS AND NOTATIONS
In DSP-based physical modeling, signals and systems are primarily represented in the time domain. For conceptual understanding as well as for practical implementation of the measurement and estimation techniques the time vs. frequency-domain duality is important. Let us denote X k( ) = DFT x n( ){ } and x n( ) = IDFT X k( ){ } (1) where the discrete-time signal x n( ) is mapped to a complex-valued sequence X k( ) using the discrete Fourier transform DFT !{} . The inverse discrete Fourier transform is denoted by IDFT !{} . A discrete-time sample sequence fully represents a continuous-time bandlimited signal if the sampling rate is equal to or higher than twice the highest frequency component in the continuous-time analog signal.
Convolution is an important operation since in linear systems the output y n( ) is obtained by con-volving the input signal x n( ) and the impulse response h n( ) of the system. Time-domain convolution can be processed in the frequency domain by y n( ) = x n( )!h n( ) = IDFT DFT x n( ){ } DFT h n( ){ }{ } = IDFT X k( ) H k( ){ } (2)
so that the efficient Fast Fourier transform (FFT) and its inverse (IFFT) may be applied for fast numerical computations. Discrete convolution is formally equivalent to digital filtering as well as to polynomial multiplication.
Deconvolution: The inverse problem to convolution is to obtain the impulse response h n( ) or the input excitation x n( ) based on (2), i.e. h n( ) = y n( ) ø x n( ) or x n( ) = y n( ) ø h n( ) (3a, b) where ø denotes the operation of deconvolution. In digital signal processing this is equivalent to inverse filtering, i.e. obtaining input using (3b), when the output y(n) and the impulse response h(n) are given. Formally it also corresponds to polynomial division. We may define deconvolution through frequency-domain computation as x1 n( ) ø x2 n( ) = IDFT DFT x1 n( ){ } DFT x2 n( ){ }{ } (4)
i.e., by division in the frequency domain which implies an efficient way to compute it using the FFT. The reciprocal of sequence x n( ) is defined here as another sequence y n( ) that, when convolved with
x n( ) , yields a unit impulse. Then

y n( ) = RCP x n( ){ } = ! n( ) ø x n( ) = IDFT 1 DFT x n( ){ }{ } (5)
where RCP !{} is the reciprocal operator and ! n( ) is a unit impulse with value 1 at index 0 an zero elsewhere. Thus the reciprocal of the impulse response of a linear system, when fed into the system, yields a unit impulse.
The cascading operation in the time domain is defined here as
y n( ) = x n( ) ^ p = IDFT DFT x n( ){ }{ }p{ } (6)
meaning that p sequences are convolved together, if the exponent p is a positive integer. For negative integer values of p we may denote y n( ) = x n( ) ^ ! p( ) = RCP x n( ){ }{ }^ p (7)
and we call it inverse cascading. As a special case x n( ) ^0 = ! n( ) , i.e., it yields a unit impulse. Fractional cascading with real-valued p is a useful operation for length scaling of wave transmission responses in acoustic tubes.
The operations defined above for discrete-time sequences as well as their frequency-domain equivalents are the mathematical tools to be used to estimate impulse responses and excitations of linear tube systems when some measured discrete-time signals are available. Finite length (support) and spectral considerations
All practical numerical signal processing is based on finite-length sequences. This is especially true for acoustic measurements of tube responses where careful windowing must be applied to yield desired parts out of registered signals. Another issue of importance is the computation of operations such as convolution, deconvolution, reciprocal, and cascading through frequency-domain operations. These yield circularly distorted results unless the size of DFT and IDFT is large enough. We will consider the requirements that must be met in order to guarantee faithful results.
Convolution requirements: For two finite support sequences x1 n( ), nonzero only for n ! n1,s , n1,e[ ) and x2 n( ), nonzero only for n ! n2 ,s , n2,e[ ) (8)
the resulting convolution sequence and its nonzero support are y n( ) = x1 n( )!x2 n( ) = x1
m
" m( )x2 m # n( ), nonzero for n $ n1,s + n2 ,s , n1,e + n2 ,e #1[ ) (9)
Here ni ,s is the start index of sequence i and ni ,e is the end index (first nonmember of the interval). The size of the resulting nonzero sequence is thus size y n( ){ } = size x1 n( ){ } + size x2 n( ){ } ! 1 (10) If the size of the DFT and IDFT transforms used for convolution according to (2) is equal to or larger than the value from (10) the resulting sequence is unfolded (noncircular) and corresponds to the convolution by the time-domain algorithm (9). (Numerical differences due to finite precision are not considered here.) The circularity property of DFT-based convolution is easily shown for a pair of unit impulses
! n " n1( ) #! n " n2( ) = IDFT e"2$ jn1 /N e"2$jn2 /N{ } = IDFT e"2$ j mod n1+n2( ),N[ ]/ N%
& '
( ) *
= ! n " mod n1 + n2( ),N[ ]( )
where mod(n,N) is n modulo N. The DFT and IDFT operations are computed over index range [0, N). Deconvolution requirements: Folding due to circularity must be avoided in deconvolution as well. In
a general case this turns out to be more difficult than with convolution. We may write q ,r[ ] = deconv b, a( ) such that b = conv q ,a( ) + r (11) Here deconv means deconvolution and conv convolution, q is the quotient, and r is the remainder in the sense of polynomial division. The time-domain computation of deconvolution in (11) and the frequency-domain version in (4) are equivalent only if the polynomial division stops with zero remainder within a

step count that is equal to the transform size used for (4). In a general case the result is infinitely long as can be understood when the deconvolution is interpreted
as inverse filtering, i.e., filtering using an IIR filter. This also implies the possibility of instability if the z-transform polynomial of sequence a in (11) has zeros outside the unit circle in the complex plane.
Since the deconvolution result is practically always infinitely long, folding due to circularity in (4) cannot be entirely avoided using finite size transforms. This does not, however, make frequency-domain deconvolution useless. A test is needed to guarantee that the amount of folding remains acceptably low. By comparing the tail values against the maximum value of the deconvolution result we may find a measure of folding and accuracy. The size of transforms can be automatically increased if the desired accuracy is not met.
If the Fourier transform in the denominator of (4) has values approaching zero, the division result will have corresponding spectral poles (unless the numerator also happens to have the same zeros) and compu-tational accuracy may be a problem. A practical way to look at this is that both the numerator and the denominator should have good enough signal-to-noise ratio (including the quantization effects due to finite word-length precision). Form (4) avoids some accuracy problems found with the direct time-domain algorithm and at the same time it is computationally very efficient. Complete knowledge of sequence x1 n( ) or x2 n( ) is not needed, contrary to what has been assumed in (Agulló et al. 1995). There are methods to improve the stability of the time-domain deconvolution (see prev. ref.), but frequency-domain processing may as well be improved using spectral criteria in order to reduce errors due to measurement noise.
In practice the cases where the spectral level of the denominator in (4) approaches zero are typically found at very low frequencies (d.c. sensitivity of acoustic transducers is often zero) and at high frequencies near half of the sampling rate especially due to antialiasing filters in A/D converters. These require special care to be taken so that the frequency-domain division yields reliable results.
Requirements for reciprocal and cascading: As a special case of (4) the computation of reciprocal as defined in (5) must meet the same requirements as the computation of deconvolution. The cascading operation (6) is reduced to a series of convolutions when the parameter p is a positive integer. In such a case the size of DFT and IDFT transforms needed is size x n( ) ^ p{ } = p ! size x n( ){ } " p " 1( ) (12) For negative integer values of p the requirements of reciprocal and cascading operations are to be applied together. When p is a real number the operation may be called fractional cascading since it may be seen as consisting of a "fraction of an impulse response" in addition to an integer number of cascaded systems. This finds natural use in representing wave propagation systems where an impulse response from a point to another can be scaled by this operator to correspond to another length of wave propagation.
When the scaling parameter p in fractional scaling is a real number, the size requirement for DFT-based computation is in theory infinite. This can be seen by cascading an impulse k ! n " n0( ) of amplitude k by factor p which yields
k ! n " n0( )[ ] ^ p = IDFT k e"2# jn0 / N[ ]
p$ % &
' ( ) * k
psinc n " pn0( ) (13)
when the transform size N approaches infinity. In practice the transform size for frequency-domain computation of the cascading operation must be large enough to keep temporal folding due to circularity acceptably low. TUBE MEASUREMENT TECHNIQUES
The wave transfer functions of a wind instrument without the mouthpiece can be measured using the prolongation tube method as shown in Fig. 2, cf. (Agulló et al. 1995). When the properties of the prolongation tube are known (measured or computed) the transfer functions of the instrument, such as reflection from the bore, driving-point impedance, as well as transmission through the bore and radiation from the terminating opening, can be computed from data that is measured outside the instrument.

Fig. 2. Wind instrument measurement system with a prolongation tube.
An impulse-like excitation is sent from a miniature driver (sound source) in the prolongation tube and microphones in positions M1 , M2 and M3 are used to record the responses. Deconvolution of (3a) can be applied to compute the desired impulse response h n( ) when excitation x n( ) and response y n( ) are available. The main requirement is that the excitation and the response must be separable in the microphone signals using windowing or estimation techniques.
The acoustic excitation from the sound source driver may be made more impulse-like by first measuring the response and then computing its reciprocal (5) to be used as a new excitation to the driver (Välimäki et al. 1995). Actually, the excitation may be any flat-spectrum signal—such as white noise or maximum-length sequences (Borish and Angell)—as far as all measured signals can be deconvolved by it to yield impulse responses where the excitation and the response are separable. Repetition and averaging is also desirable in order to reduce measurement noise in the results.
The wave transmission properties of the prolongation tube can be determined using microphone signals at M1 and M2 by first windowing the direct sound source responses and then deconvolving M2 response by M1 response. Any other transmission response, such as from M2 to J can be computed with length scaling by applying fractional cascading as defined in (6).
The two main modeling properties of the instrument to be measured are (Fig. 2): r (n) , the backwards reflection impulse response, also called reflectance, from the bore at junction J (the
tubes are matched to have the same diameter at the junction), and t (n ) , the transmission from J through the bore, combined with sound radiation from the open end, as
measured by microphone M3 . The reflection response r (n) is computed by deconvolving the original and the reflected response at
microphone M2 and by compensating for the transmission from M2 to J and back to M2 (by deconvolu-tion). The transmission and radiation response t (n ) is computed by deconvolving M3 response by M2 response and compensating for the transmission from M2 to J.
Another feature of interest is the acoustic impedance of the instrument bore as seen from the junction J. Its DFT, Z(k ) , may be computed from R(k ) , the DFT of the reflection response r (n) , as
Z(k ) =P+ (k ) + P! (k )
P+ (k ) Z0 ! P
! (k ) Z0
= Z01 + P! (k ) P+(k )
1 ! P! (k ) P+(k )= Z0
1 + R(k )
1 ! R(k ) (14)
where Z0 is the acoustic impedance of the prolongation tube and P+ (k ) and P! (k ) are DFT's of the pressure signals (Fig. 2).
Practical considerations We have carried out tube and wind instrument measurements using the following equipment. An
approximation of a unit impulse is generated by a miniature transducer (a Walkman headphone driver). Its response is registered by miniature electret pressure microphones (Sennheiser KE4-211-8) in positions M1 , M2 , and M3 (max 2 microphones per measurement). A computer program driving 16-bit stereo A/D and D/A converters controls the measurement process. A sampling rate of 22 kHz is used which yields a frequency band of up to about 10 kHz.
Since all transfer functions and impulse responses are relations of two signals, there is no need for absolute calibration of the microphones used in the measurements. The reflection response r (n) depends primarily on the excitation and response that are windowed from microphone M2 signal so that the result is automatically self-calibrated. For measurements that rely on signals from two microphones we have used a sensor switching method (Välimäki et al. 1995) where the positions of the microphones are switched between two experiments. Geometrical averaging of the two transfer functions (in the frequency

domain) yields a calibrated result. Another interesting problem in practice is due to partial overlapping of the excitation and the response
in a recorded microphone signal unless a very long prolongation tube or a very ideal sound source is used. Hence, simple windowing cuts the ‘tail’ of the excitation. We applied the Prony’s method (Parks and Burrus) to extrapolate the tail. This ARMA model allows to estimate the overlapped part of the excitation signal. The order of the denominator was selected to be the highest one that did not yield any instability, in order to maximize the precision of the estimation. The order of the numerator was set equal to the length N (in samples) of the non-overlapped part, so that the N first points of the estimated signal exactly matched the N first points of the registered signal. This technique results in a filter whose impulse response approximates the entire excitation, without introducing error for the N first points.
Figure 3 shows impulse responses at microphone positions M1 and M2 in the prolongation tube with open end (no instrument) at the right side. In both cases signal A is the excitation traveling to the right, B is the first reflection from the open end, and C the next reflection from the driver. These are the results when a reciprocal excitation signal is used.
Fig. 3. Signals registered at M1 (left) and M2 (right) with a reciprocal excitation signal.
MEASUREMENT EXAMPLES AND RESULTS
We will demonstrate the methodology presented above by a couple of simple tube measurements and a measurement on the reflection impulse response of the clarinet bore. The left side of Figure 4 shows the magnitude of wave transmission in a cylindrical tube, both a measured result and a theoretical curve. The right side illustrates the reflection from an open end, both measured and theoretical. We may find that the differences between measured and theoretical values are maximally about 0.5 dB within the frequency band of interest (200 Hz ... 7 kHz).
Fig. 4. (Left) Transmission function of a cylindrical tube of radius 8 mm and length 79 cm. Solid line: measured
value. Dashed line: theoretical value from (Benade). (Right) Reflection function at the open end of a cylin-drical tube of radius 8 mm. Solid line: measured value. Dashed line: theoretical value from (Beranek).
Reflection from the clarinet bore

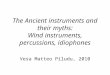
The measurement of the reflection function described above was applied to a clarinet with closed finger holes. Figure 5a shows the impulse response reflected back from the instrument bore as seen at junction J in Fig. 2. The first 3.5 ms in Fig. 3a show the reflections from closed finger holes. The smoother wave component around 4 ms is the main reflection from the open termination of the instrument which determines the fundamental frequency of oscillation in normal playing conditions. An estimate of the tube profile could be integrated from the reflection function (Sondhi and Resnick). Figure 5b depicts the spectrum of the reflection that shows lowpass characteristics.
0.1
0
-0.15.0 ms 2.50.0
Reflection impulse response
-10
-15
-20
dB
-5
kHz4.03.02.01.00
Reflection magnitude spectrum Finger holes Termination
a) b)
Fig. 5. a) Reflection impulse response of a clarinet as measured with the system of Fig. 2. b) Corresponding magnitude spectrum.
The reflection responses in Fig. 5 may be further be used in designing the reflection filter R(z) of the waveguide synthesis model in Fig. 1. Separate reflections from closed finger holes must be discarded in order to keep the model simple and efficient. The magnitude response of Fig. 5b can be approximated by a low order lowpass filter. The effective delay of the model loop can be estimated from the phase behavior of the reflection response (not shown here). BACK TO THE SOURCE BY INVERSE FILTERING
As a new method to study the behavior of wind instruments we propose the use of inverse filtering in the following manner. The mesurement system in Fig. 2 can be applied to estimate the transfer function hJ ,M+
(n) from pressure pJ+ at junction J to pressure pM at microphone M3 as well as the (noncausal)
relation hJ ,M!
(n) between backwards traveling pressure pJ! and microphone signal pM by
hJ ,M+
(n) = pM (n ) ø pJ+
(n) and hJ,M!
(n ) = pM (n) ø pJ!
(n ) (15a, b)
Now, based on these signal relations we may apply inverse filtering (deconvolution) to get pressure components pJ
+ and pJ! at the entrance of the instrument bore in normal playing conditions by applying
operations pJ
+(n ) = pM (n) ø hJ,M
+(n), pJ
!(n) = pM (n ) ø hJ,M
!(n), and pJ = pJ
+(n ) + pJ
!(n) (16a, b,c)
where pJ is the total pressure at junction J. Notice that in theory it does not matter what is connected to the left of junction J since we are dealing only with the linear time-invariant part to the right of the junction.
Knowing the pressure wave components pJ+ and pJ
! is essential in order to analyze the behavior of the nonlinear mouthpiece section including a reed or the lips of the player. (Another principle to isolate the wave components is to use a pair of microphones closer than a wavelength apart and to estimate pressures from these two signals.) From pressures and impedance conditions we may also estimate the volume velocities. With an additional pressure probe in the mouth of the player it is possible to end up with relatively complete information on the physical variables at both sides of the mouthpiece which is needed for modeling of this nonlinear part of the instrument.
There are several practical problems with this method. The first is to measure and estimate accurately the two transfer functions hJ ,M
+(n) and hJ ,M
!(n) . Since hJ ,M
+(n) is of highpass nature having a zero at
zero frequency, inverse filtering at low frequencies is difficult to make accurate. The same is even more true with using hJ ,M
!(n) . Another problem is to guarantee same physical conditions during the measure-

ment of the transfer functions and the inverse filtering during normal playing of the instrument. For example, a change in temperature inside the air column has an undesirable effect on signal delays. More work is needed to develop the method to be a practical tool in wind instrument measurements.
SUMMARY AND CONCLUSIONS
We have presented a methodology for measurements and estimation of wind instrument behavior using DSP techniques such as deconvolution. A mathematical framework of operations is formulated, tube mea-surement techniques are given, and some mesurement results are shown. Impulse response measurements characterizing an instrument and applicable to the calibration of synthesis models are discussed. A technique to estimate physical variables inside the instrument bore, using only signal registration outside it, is proposed.
ACKNOWLEDGEMENT
This research has been partially supported by the Academy of Finland.
REFERENCES
Agulló J., Cardona S., and Keefe D. H., 1995. “Time-domain deconvolution to measure reflection functions for discontinuities in waveguides.” J. Acoust. Soc. Am. 97(3): 1950–1957. Benade A. H., 1968. “On the propagation of sound waves in a cylindrical conduit,” J. Acoust. Soc. Am., vol. 44, pp. 616–623. Beranek L. L., 1986. Acoustics. The Acoust. Soc. Am., Cambridge, MA, 1954, Reprinted 1986. Borish, J., and Angell, J. B. 1983. “An efficient algorithm for measuring the impulse response using pseudorandom noise.” J. Audio Eng. Soc. 31, 7, pp. 478-487. Cook P. R., 1988. Implementation of Single Reed Instruments with Arbitrary Bore Shapes Using Digital Waveguide Filters. Stanford, CA: Stanford University, CCRMA, Tech. Report No. STAN–M–50. Cook P. R., 1991a. “TBone: an interactive waveguide brass instruments synthesis workbench for the NeXT machine.” Proc. 1991 Int. Computer Music Conf., Montreal, Canada, pp. 297–299. Cook P.R., 1991b. “Non-Linear Periodic Prediction for On-Line Identification of Oscillator Characteris-tics in Woodwind Instruments.” Proc. 1991 Int. Comp. Music Conf., Montreal, Canada, pp.157-160. Parks T. W., and Burrus C. S., 1987. Digital Filter Design. New York: John Wiley & Sons. Scavone G. P., 1994. Combined Linear and Non-Linear Periodic Prediction in Calibrating Models of Musical Instruments to Recordings. Project report, CCRMA, Stanford University, Sept. 1994. Smith, J. O., 1986. “Efficient simulation of the reed-bore and bow-string mechanisms.” Proc. 1986 Int. Computer Music Conf., The Hague, Netherlands, pp. 275–280. Smith, J. O., 1992. “Physical modeling using digital waveguides.” Computer Music J. 16(4): 75–87. Sondhi M. M., and Resnick J. R., 1983. “The Inverse problem for the Vocal Tract: Numerical methods, acoustical experiments and speech synthesis,” J. Acoust. Soc. Am. 73, 985-1002. Välimäki V., Karjalainen M., Jánosy Z., and Laine U. K., 1992. “A real-time DSP implementation of a flute model.” Proc. 1992 IEEE Int. Conf. Acoustics, Speech, and Signal Processing, San Francisco, CA, vol. 2, pp. 249–252. Välimäki V., Karjalainen M., and Laakso T. I.., 1993. “Modeling of woodwind bores with finger holes.” Proc. 1993 Int. Computer Music Conf., Tokyo, Japan, pp. 32–39. Välimäki V., and Karjalainen M., 1994., “Digital waveguide modeling of wind instrument bores con-

structed of truncated cones.” Proc. 1994 Int. Computer Music Conf., Aarhus, Denmark, pp. 423–430. Välimäki V., 1994. Fractional Delay Waveguide Modeling of Acoustic Tubes. Espoo, Finland: Helsinki University of Technology, Laboratory of Acoustics and Audio Signal Processing, Report no. 34. Välimäki V., Hernoux B., Huopaniemi J., and Karjalainen M., 1995, “Measurement and Analysis of Acoustic Tubes Using Signal Processing Techniques.” Proc. FINSIG-95 Finnish Signal Processing Symposium, Helsinki, Finland, June 2, 1995, pp. 16-20.