Embed Size (px)
DESCRIPTION
Instrumentación y control
Citation preview
INSTITUTO POLITECNICO NACIONAL
UNIDAD PROFESIONAL INTERINDICIPLINARIA DE INGENIERÍA
CIENCIAS SOCIALES Y ADMINISTRATIVAS
Computadora como elemento de control industrial
Integrantes:Ramírez Velázquez MauricioMP Armando Sandoval Aguilar Irvin DavidSamper Hernández Luis AlbertoZúñiga Juárez Jonathan Israel
Equipo No. 7 Secuencia: 4IM60
Prof.: Hernández Mejía Oswaldo.
Instrumentación y control Industrial
Índice
• Computadora como elemento de control industrial.
a. Arquitectura de la computadora.b. Interfaces y protocolosc. Control distribuido
• Aplicación en la industria de esquemas de control asistido por computadora
Computadora como elemento de control industrial
La estructura de un autómata programable puede ser modular o compacta:
Estructura compacta. se distingue por presentar en un solo bloque todos sus elementos, es decir: fuente de alimentación, unidad central de proceso o CPU, memorias, tarjetas de entradas y salidas, etc. Suelen ser autómatas pequeños, debido a que su estructura no se pueden ampliar
Estructura modular. Se caracteriza por separar todo en módulos, la unión entre estos se realiza por un bastidor (Rack). Cuando se desea ampliar con mayor numero de tarjetas, ya esta lleno el bastidor, se pueden colocar más bastidores unidos por un bus.
Arquitectura de la computadoraFuente de poder
En esta se produce una transformación de la tensión de red a valores menores, una vez transformada la señal se rectifica obteniéndose una corriente continua. Dependiendo de la calidad de la corriente que sea necesaria, así serán los filtros y reguladores utilizados en la fuente de alimentación. Muchos de los autómatas trabajan con corriente continua 24 Vcc.
Algunos tipos de autómatas incorporan una batería, otros un condensador de alta potencia cuya finalidad es mantener el programa y algunos datos en la memoria si hubiera un corte de la tensión exterior.
Arquitectura de la computadora
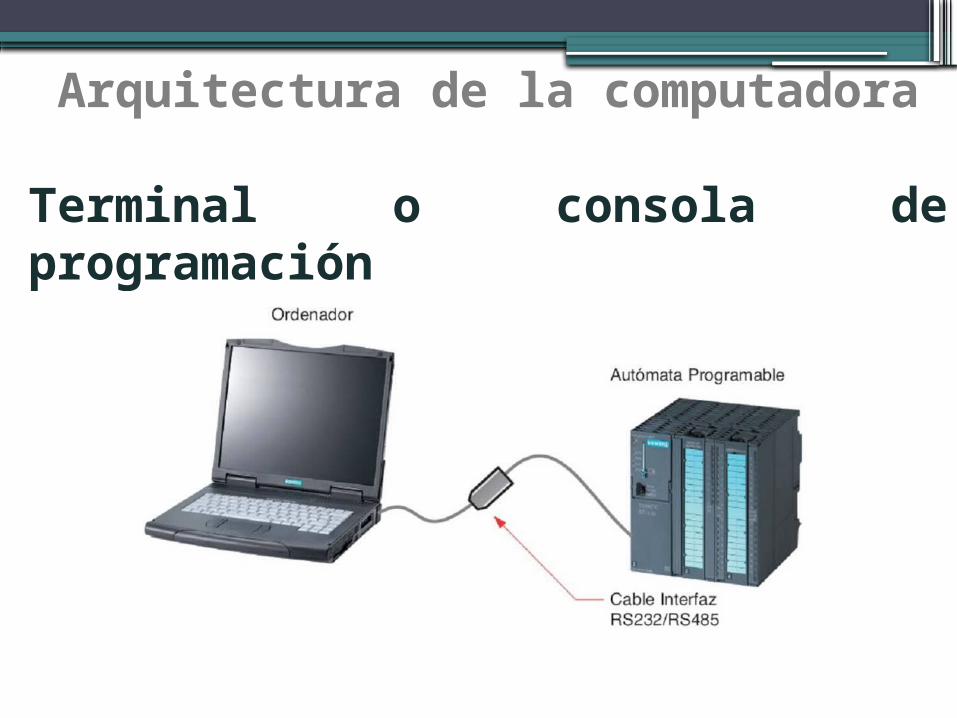
Terminal o consola de programación
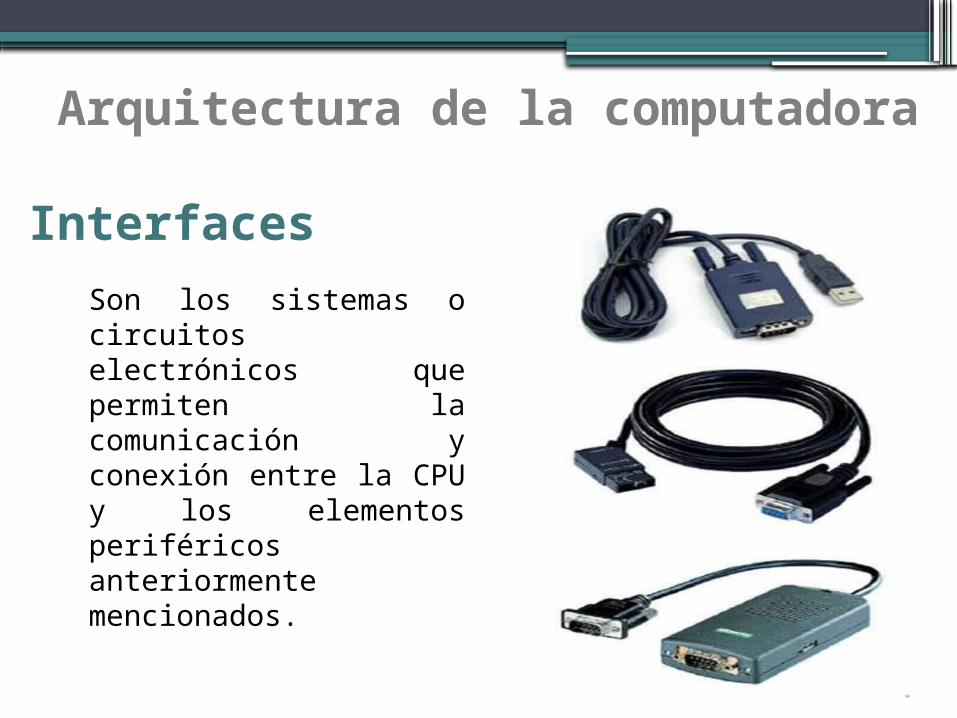
Son los sistemas o circuitos electrónicos que permiten la comunicación y conexión entre la CPU y los elementos periféricos anteriormente mencionados.
Arquitectura de la computadora
Interfaces
Arquitectura de la computadora
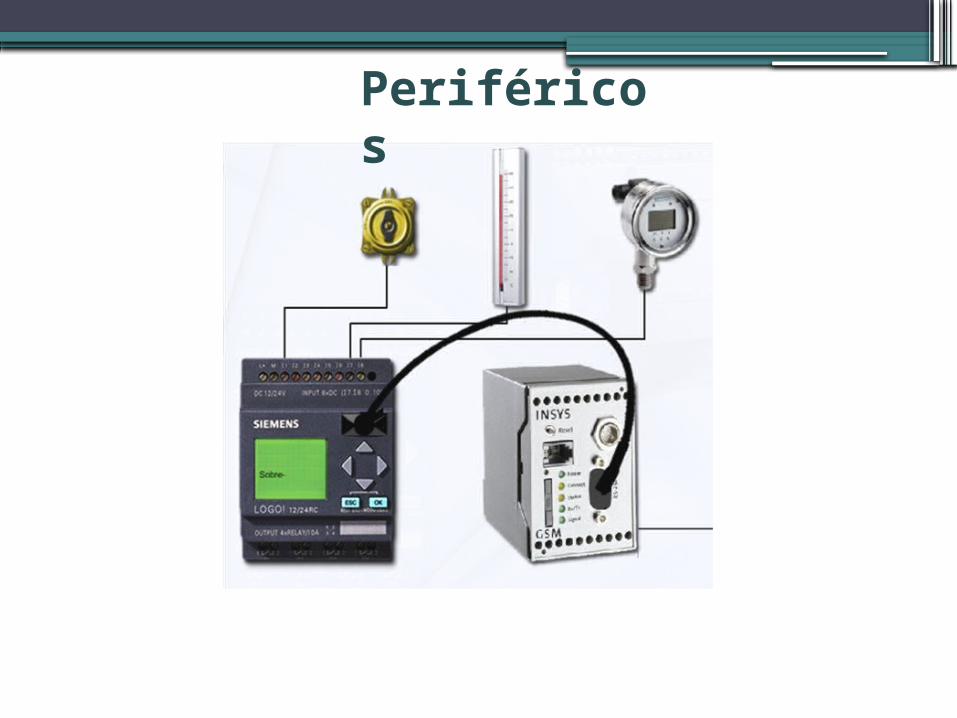
Periféricos Son aquellos sistemas o equipos que realizan una función específica, amplia las aplicaciones del autómata , pero con independencia sobre este, normalmente no forman parte de él.
En la actualidad se utilizan ordenadores para tareas de visualización, supervisión y operación. Para lo cual se necesita un software especial denominado SCADA (Supervisory Control And Data Acquisition).
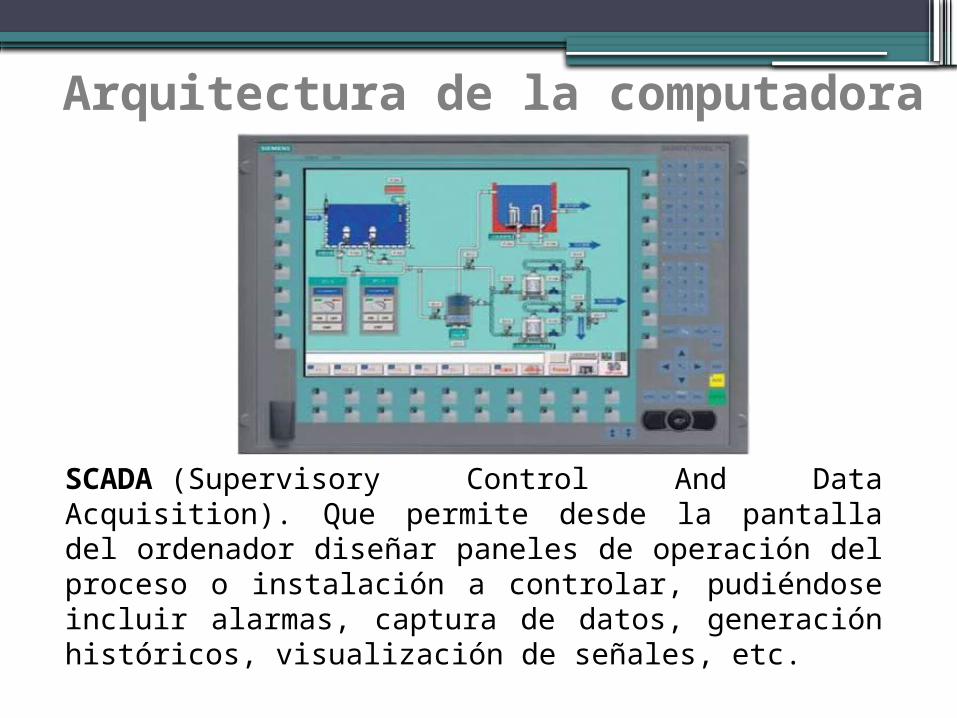
SCADA (Supervisory Control And Data Acquisition). Que permite desde la pantalla del ordenador diseñar paneles de operación del proceso o instalación a controlar, pudiéndose incluir alarmas, captura de datos, generación históricos, visualización de señales, etc.
Arquitectura de la computadora
Software
El software normalmente se almacena en un dispositivo de memoria no volátil (memoria flash, ROM, discos duros y cintas magnéticas). Un software PLC es el corazón del sistema PLC y se compone de instrucciones, funciones y elementos utilizados para monitorear o controlar el PLC.
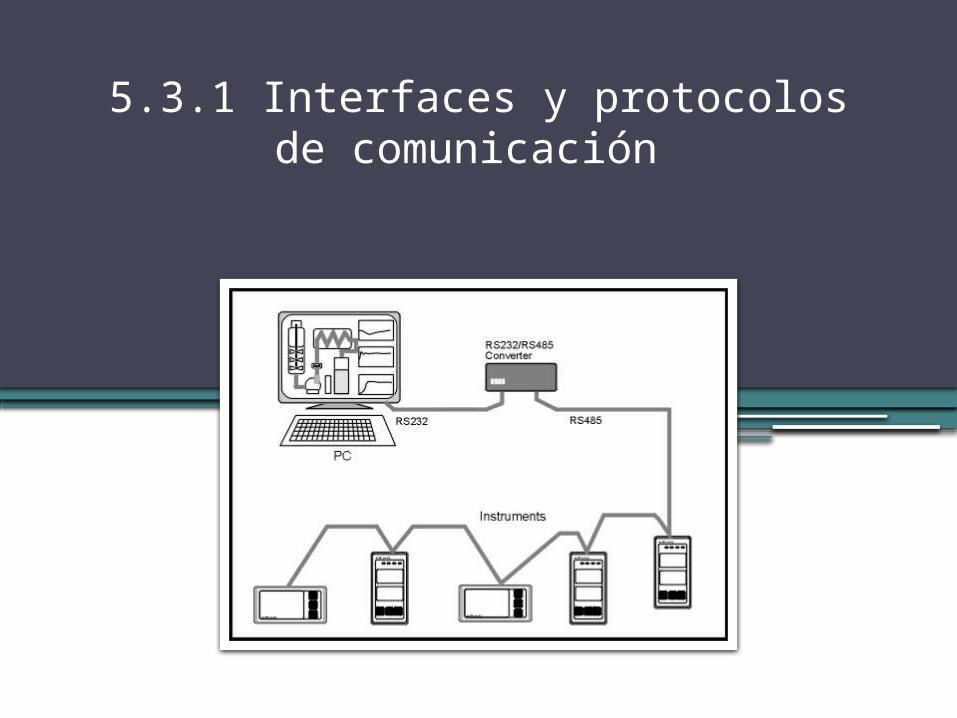
5.3.1 Interfaces y protocolos de comunicación
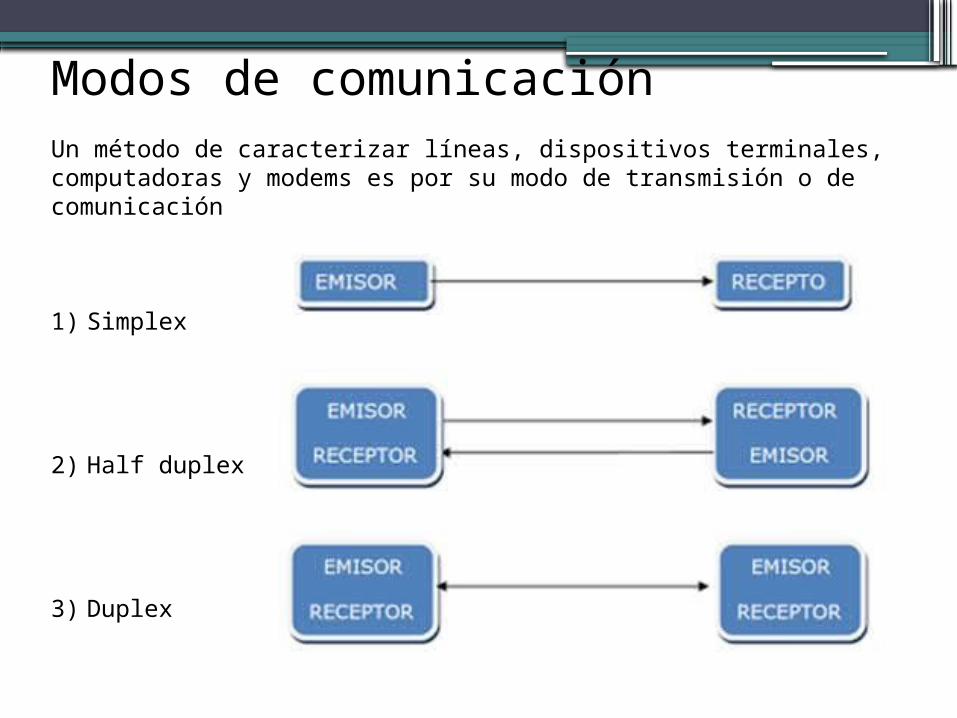
Modos de comunicaciónUn método de caracterizar líneas, dispositivos terminales, computadoras y modems es por su modo de transmisión o de comunicación
1) Simplex
2) Half duplex
3) Duplex
Interfaces Las interfaces de comunicación serial son elementos que permiten la transmisión de información de un equipo de datos (DTE) hacia un MÓDEM o hacia el medio de transmisión por el cual va a comunicarse con otro equipo de datos (DTE).
La transmisión de datos vía este medio, están sujetos a estándares internacionales para asegurar la compatibilidad entre equipos de diferentes fabricantes.
Una consideración primaria a nivel de campo es que las líneas de transmisión de datos son económicas y sencillas.
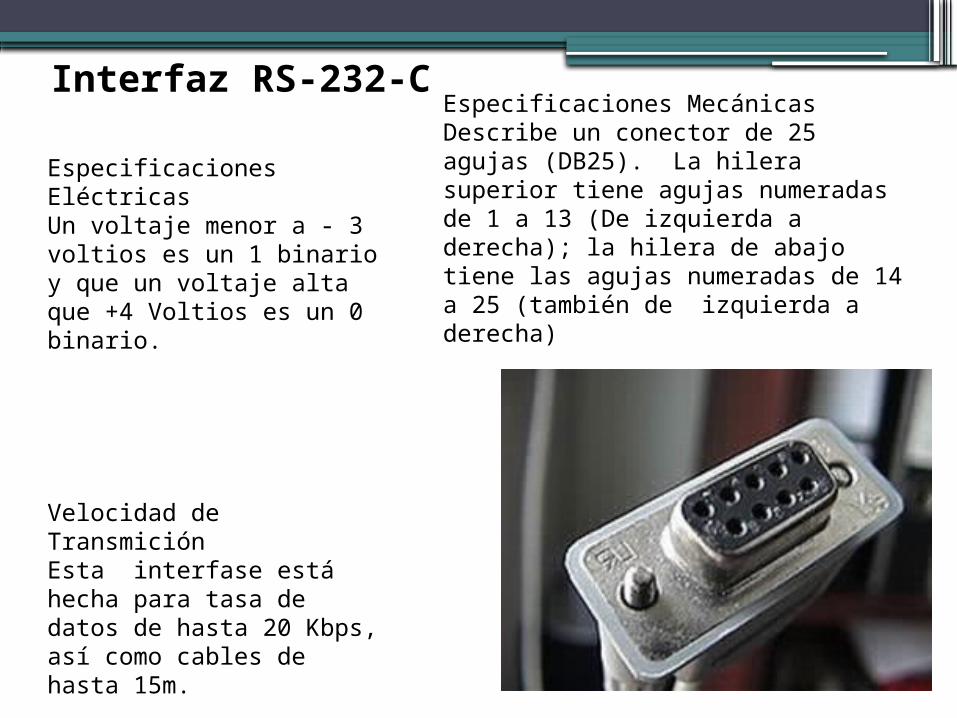
Interfaz RS-232-C
Especificaciones EléctricasUn voltaje menor a - 3 voltios es un 1 binario y que un voltaje alta que +4 Voltios es un 0 binario.
Velocidad de TransmiciónEsta interfase está hecha para tasa de datos de hasta 20 Kbps, así como cables de hasta 15m.
Especificaciones MecánicasDescribe un conector de 25 agujas (DB25). La hilera superior tiene agujas numeradas de 1 a 13 (De izquierda a derecha); la hilera de abajo tiene las agujas numeradas de 14 a 25 (también de izquierda a derecha)
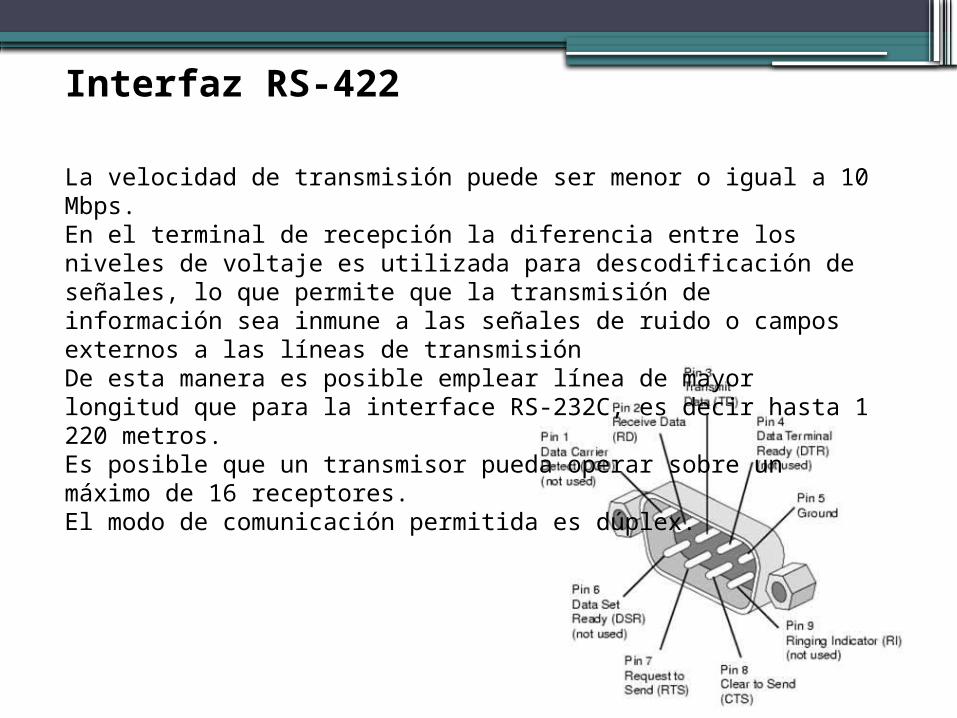
Interfaz RS-422
La velocidad de transmisión puede ser menor o igual a 10 Mbps.En el terminal de recepción la diferencia entre los niveles de voltaje es utilizada para descodificación de señales, lo que permite que la transmisión de información sea inmune a las señales de ruido o campos externos a las líneas de transmisiónDe esta manera es posible emplear línea de mayor longitud que para la interface RS-232C, es decir hasta 1 220 metros.Es posible que un transmisor pueda operar sobre un máximo de 16 receptores. El modo de comunicación permitida es dúplex.
Interface RS-485
Con cable de par trenzado se puede transmitir a velocidades de hasta 100 Kbps a una distancia de 1000 m.
Son interfaces de tensión con corriente elevada: Tensión de señal <6V Estado lógico 1 = diferencia de potencial <200 mV Estado lógico 0 = diferencia de potencial >200 mV Alta calidad en la transmisión. Permiten enlaces multipunto. Hasta un máximo de 32 servicios actuando como transmisores o
receptores pueden ser conectados a un cable de dos hilos (en operación tipo bus).
La longitud máxima de la línea de transmisión varía desde 1,2 Km. (a 93,75 Kbit/s) hasta 200 m (a 500 Kbit/s).
Utiliza el modo de comunicación half-dúplex. Esta interface goza de gran popularidad en aplicaciones
industriales. Principalmente emplea cables de par trenzado y apantallados de bajo costo.
TTY (Lazo de corriente de 20 mA)El lazo de 20 mA es usado como alternativa a la interface RS-232C. Su principal ventaja radica en su insensibilidad a la interferencia de modo que se puede cubrir grandes distancias. TTY también es utilizado cuando existen grandes fuentes de campo electromagnético cerca de las líneas de transmisión.
Trabaja con una corriente de 20 mA que es activada y desactivada (‘1” y “0”) en el tiempo durante la transmisión. Así, cada terminal tiene dos lazos; uno para transmisión y otro para recepción.
El tipo de transmisión es por corriente, permitiendo solamente la conexión de un transmisor y un receptor.Permite líneas de conexión de hasta 100 m con velocidades de transmisión de 19 200 bps.El modo de comunicación utilizado es dúplex.
Códigos de LíneaEstos códigos consisten en representar la señal digital transportada en otro formato digital pero con nuevas características.
La representación del la onda se suele realizar mediante un número determinados impulsos, estos impulsos representan los 1s y los 0s digitales.
Algunas de las funciones que debe cumplir un código de línea son: eliminar la componente continua, transportar además la señal de reloj, disminuir los niveles de ruido.
Codificación Manchester En este código siempre hay una transición en la mitad del intervalo de duración de los bits. Cada transición positiva representa un 1 y cada transición negativa representa un 0.
En está codificación no se tienen en cuenta los niveles de tensión sino que solo se consideran las transiciones positivas y negativas.Esta técnica posibilita una transición por bit, lo cual permite autosincronismo.Se puede eliminar la componente continua si se emplean valores positivos y negativos para representar los niveles de la señal.
Protocolo HART
El protocolo HART es un protocolo abierto de uso común en los sistemas de control, que se emplea para la configuración remota y supervisión de datos con instrumentos de campo.
CaracteristicasFácil de usar: Solución de comunicación única: Comunicación tipo Maestro-Esclavo: La señal de frecuencia, corazón del protocolo La señal digital está construida de dos frecuencias principales, 1200 Hz y 2200 Hz, representando los Bits 1 y 0 (cero), respectivamente. Con esto no es afectada en ningún modo por esta comunicación digital.
Redes de comunicacion HartModo de operación Punto a Punto.La señal análoga de 4-20 mA no es afectada por la señal HART y puede ser usada para el monitoreo o control en la forma normal. La señal de comunicación digital HART le da acceso a variables secundarias y a otras informaciones, que pueden ser usadas para propósitos de operación, mantención y diagnóstico.
Comunicación tipo Multipunto (Multidrop)Requiere solamente un par de alambres y si es aplicable, el lazo también puede tener barreras de seguridad y fuentes de poder auxiliares para hasta 15 aparatos de terreno. Todos los valores de proceso son transmitidos digitalmente; en el modo Multipunto, las direcciones de "Polling" de los aparatos de terreno son mayores que 0 y la corriente a través de cada equipo está fijada a un mínimo valor (típicamente 4 mA).
Modo de Operación Multipunto.Se recomienda el uso del modo Multipunto para aplicaciones con instalaciones de control de supervisión, que tengan equipamientos bastante alejados entre sí, tales como tendidos de cañería en gasoductos y oleoductos, como también en instalaciones en plantas de almacenamiento de combustibles u otros fluidos, Los beneficios de la comunicación HART
• Mejora las operaciones en planta.• Otorga mayor flexibilidad operacional.• Protege la inversión hecha en la instrumentación de la planta.• Entrega una alternativa económica de comunicación digital.• Implica un ahorro considerable en materiales eléctricos en las instalaciones Multipunto.
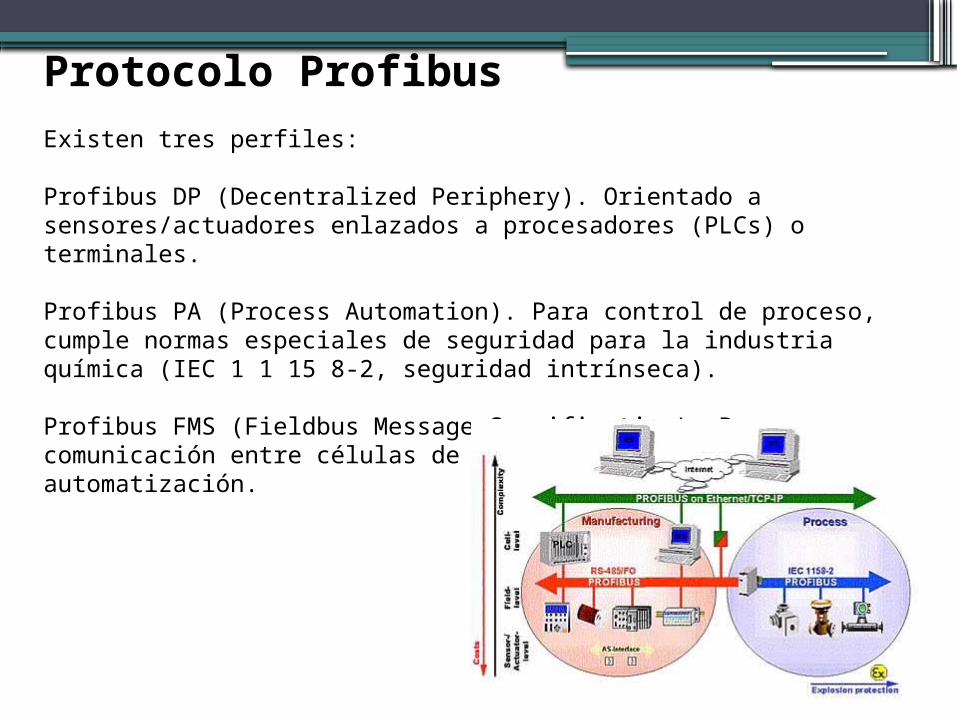
Protocolo ProfibusExisten tres perfiles:
Profibus DP (Decentralized Periphery). Orientado a sensores/actuadores enlazados a procesadores (PLCs) o terminales.
Profibus PA (Process Automation). Para control de proceso, cumple normas especiales de seguridad para la industria química (IEC 1 1 15 8-2, seguridad intrínseca).
Profibus FMS (Fieldbus Message Specification). Para comunicación entre células de proceso o equipos de automatización.
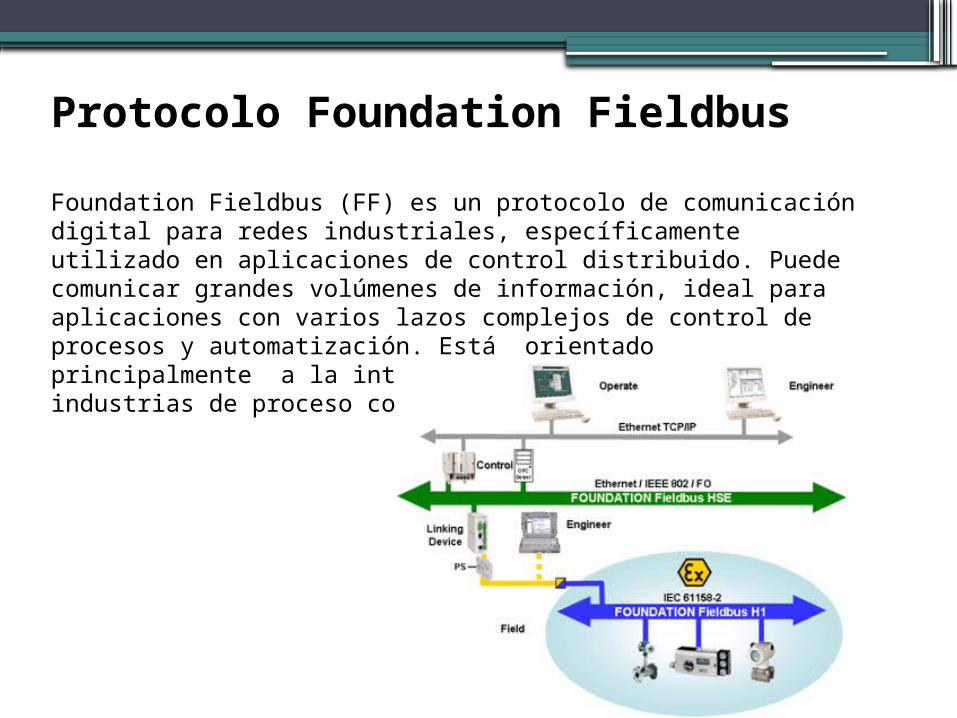
Protocolo Foundation Fieldbus
Foundation Fieldbus (FF) es un protocolo de comunicación digital para redes industriales, específicamente utilizado en aplicaciones de control distribuido. Puede comunicar grandes volúmenes de información, ideal para aplicaciones con varios lazos complejos de control de procesos y automatización. Está orientado principalmente a la interconexión de dispositivos en industrias de proceso continuo.
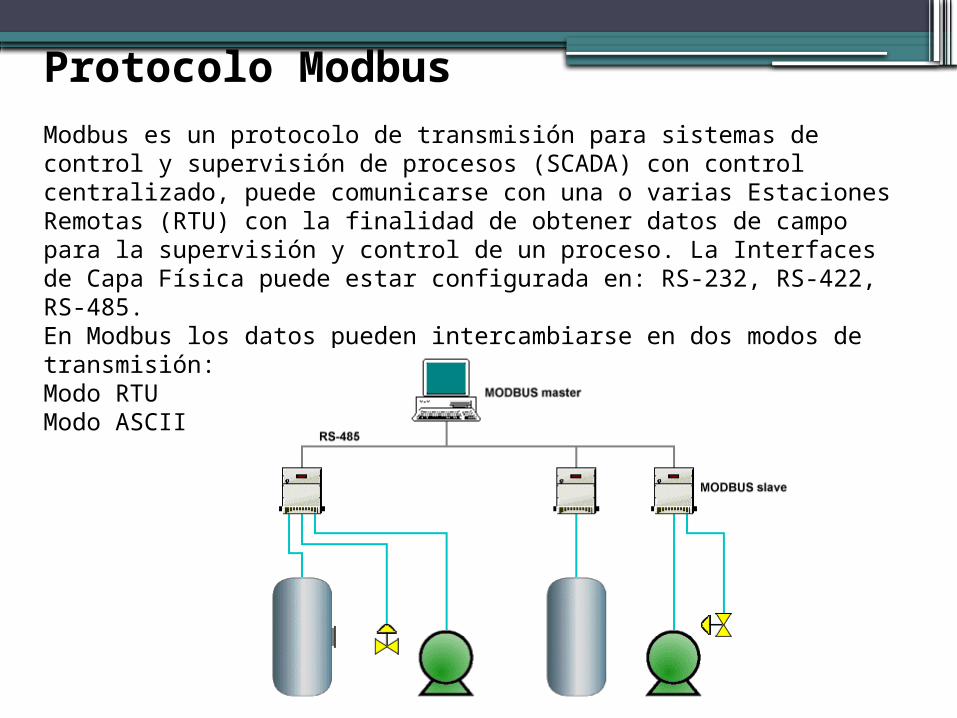
Protocolo ModbusModbus es un protocolo de transmisión para sistemas de control y supervisión de procesos (SCADA) con control centralizado, puede comunicarse con una o varias Estaciones Remotas (RTU) con la finalidad de obtener datos de campo para la supervisión y control de un proceso. La Interfaces de Capa Física puede estar configurada en: RS-232, RS-422, RS-485. En Modbus los datos pueden intercambiarse en dos modos de transmisión:Modo RTUModo ASCII
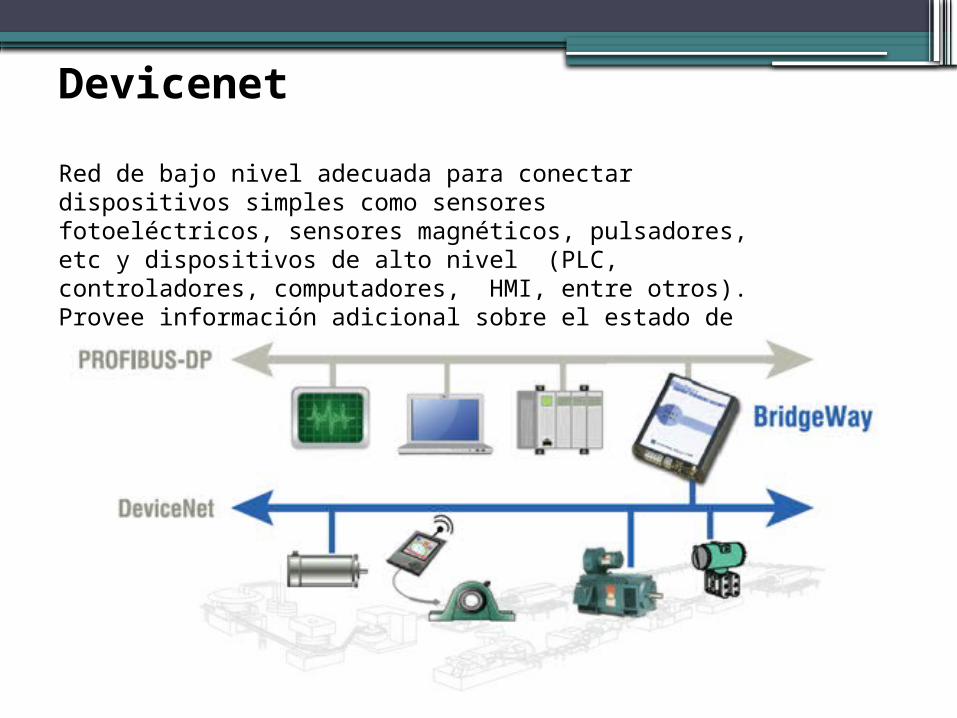
Devicenet
Red de bajo nivel adecuada para conectar dispositivos simples como sensores fotoeléctricos, sensores magnéticos, pulsadores, etc y dispositivos de alto nivel (PLC, controladores, computadores, HMI, entre otros). Provee información adicional sobre el estado de la red, cuyos datos serán desplegados en la interfaz del usuario.
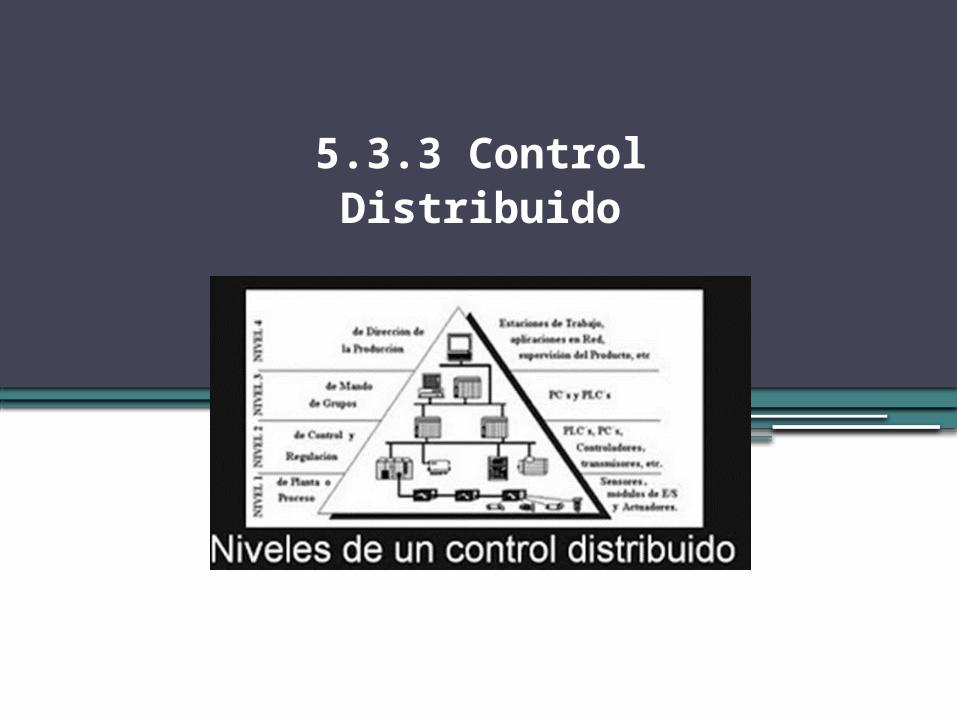
5.3.3 Control Distribuido
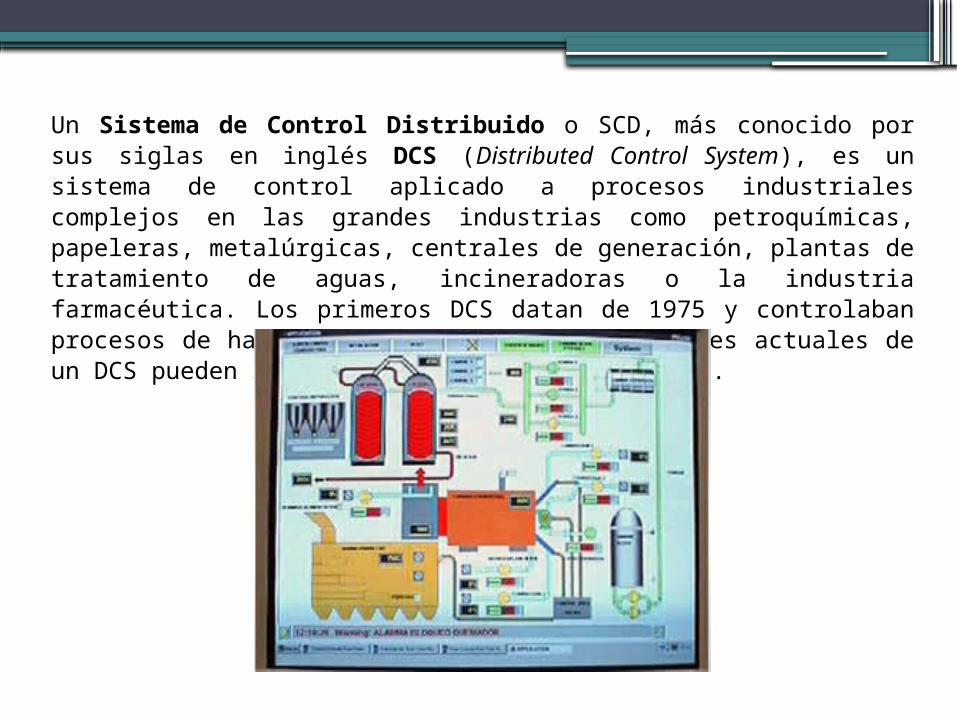
Un Sistema de Control Distribuido o SCD, más conocido por sus siglas en inglés DCS (Distributed Control System), es un sistema de control aplicado a procesos industriales complejos en las grandes industrias como petroquímicas, papeleras, metalúrgicas, centrales de generación, plantas de tratamiento de aguas, incineradoras o la industria farmacéutica. Los primeros DCS datan de 1975 y controlaban procesos de hasta 5000 señales. Las capacidades actuales de un DCS pueden llegar hasta las 250.000 señales.
Un sistema de control distribuido se refiere a un sistema de control por lo general de un sistema de fabricación, proceso o cualquier tipo de sistema dinámico, en el que los elementos del controlador no son centrales en la ubicación, pero se distribuyen en todo el sistema con cada componente sub-sistema controlado por uno o más controladores.
DCS es un sistema de control informático utilizado para el control de la línea de producción en la industria.
Todo el sistema de controladores está conectado por las redes de comunicación y de supervisión.
DCS es un término muy amplio que se utiliza en una variedad de industrias, para supervisar y controlar equipos distribuidos. Las redes de energía eléctrica y plantas de
generación eléctrica Sistemas de control ambiental Las señales de tráfico Las señales de radio Sistemas de gestión del agua Plantas de refinación de petróleo Plantas de procesos metalúrgicos Las plantas químicas Fabricación de productos farmacéuticos Las redes de sensores De carga seca y los barcos portadores de aceite a
granel
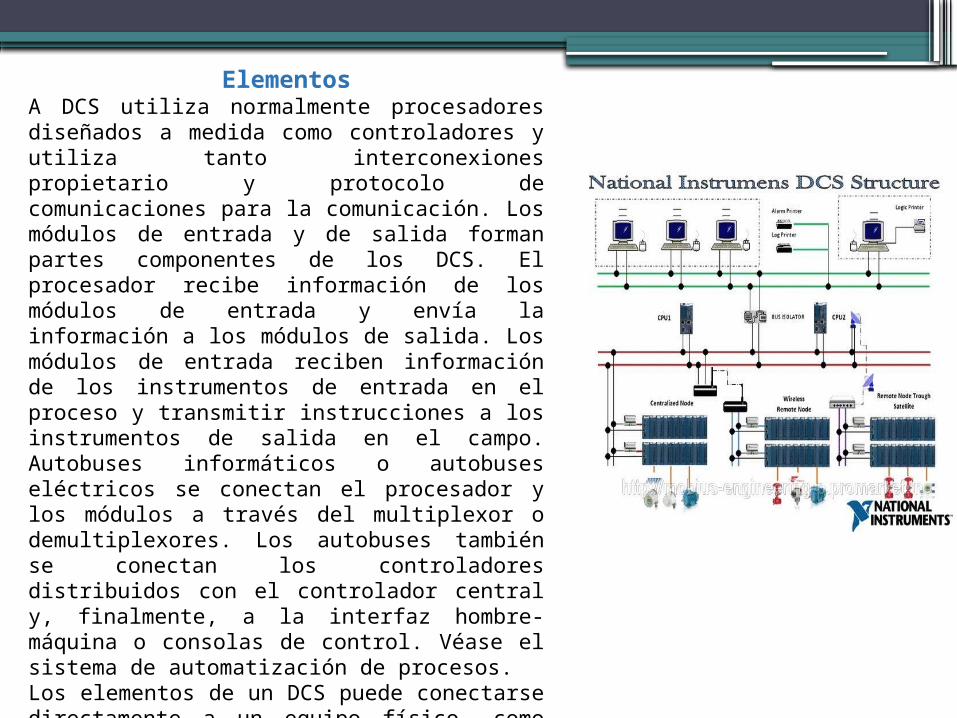
ElementosA DCS utiliza normalmente procesadores diseñados a medida como controladores y utiliza tanto interconexiones propietario y protocolo de comunicaciones para la comunicación. Los módulos de entrada y de salida forman partes componentes de los DCS. El procesador recibe información de los módulos de entrada y envía la información a los módulos de salida. Los módulos de entrada reciben información de los instrumentos de entrada en el proceso y transmitir instrucciones a los instrumentos de salida en el campo. Autobuses informáticos o autobuses eléctricos se conectan el procesador y los módulos a través del multiplexor o demultiplexores. Los autobuses también se conectan los controladores distribuidos con el controlador central y, finalmente, a la interfaz hombre-máquina o consolas de control. Véase el sistema de automatización de procesos.Los elementos de un DCS puede conectarse directamente a un equipo físico, como interruptores, bombas y válvulas y para la interfaz hombre-máquina a través de SCADA. Las diferencias entre el DCS y SCADA es a menudo sutil, sobre todo con los avances tecnológicos que permiten la funcionalidad de cada uno se superponga.
AplicacionesSistemas de control distribuido se dedican sistemas utilizados para el control de procesos de fabricación que son continuos o por lotes orientada, como la refinación de petróleo, la petroquímica, la generación de potencia de la estación central, fertilizantes, productos farmacéuticos, alimentos y bebidas de fabricación, la producción de cemento, la fabricación de acero y la fabricación de papel. DCS están conectados a los sensores y actuadores y utilizan el control de punto de ajuste para controlar el flujo de material a través de la planta. El ejemplo más común es un bucle de control de punto de ajuste que consiste en un sensor de presión, el controlador y la válvula de control. Las mediciones de presión o de flujo se transmiten al controlador, por lo general a través de la ayuda de un dispositivo de entrada/salida de acondicionamiento de señal. Cuando la variable medida alcanza un cierto punto, el controlador indica a un dispositivo de válvula o accionamiento para abrir o cerrar hasta que el proceso de flujo de fluido alcanza el punto de ajuste deseado. Grandes refinerías de petróleo tienen muchos miles de puntos de E/S y emplean muy grandes DCS. Los procesos no se limitan al flujo de fluido a través de tuberías, sin embargo, y también puede incluir cosas como las máquinas de papel y sus controles de calidad correspondientes, variadores de velocidad y los centros de control de motores, hornos de cemento, operaciones mineras, instalaciones de procesamiento de minerales, y muchos otros.
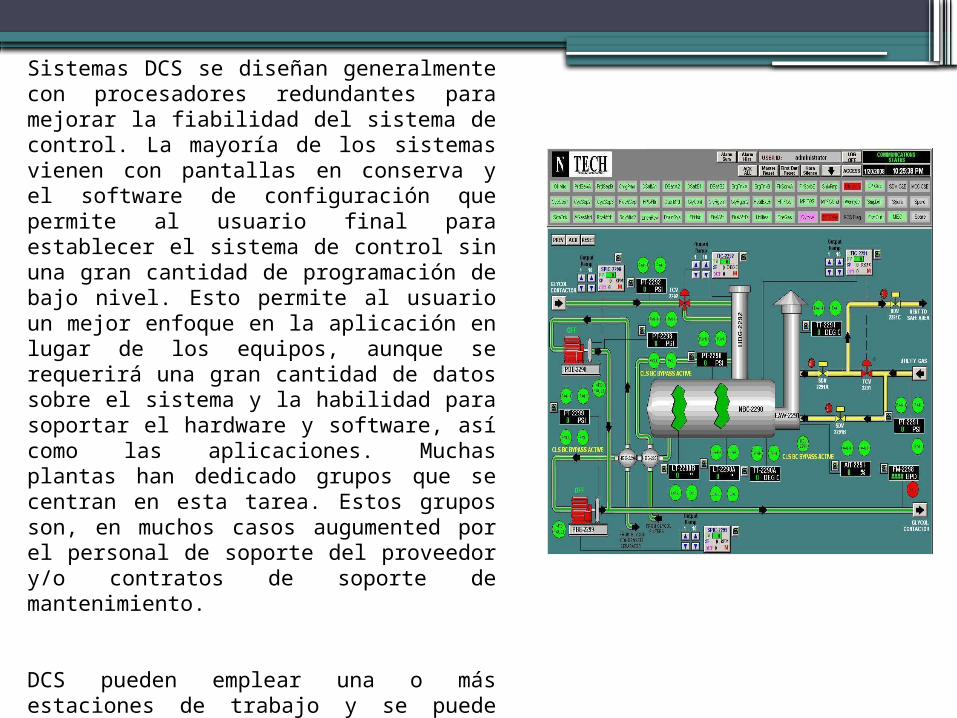
Sistemas DCS se diseñan generalmente con procesadores redundantes para mejorar la fiabilidad del sistema de control. La mayoría de los sistemas vienen con pantallas en conserva y el software de configuración que permite al usuario final para establecer el sistema de control sin una gran cantidad de programación de bajo nivel. Esto permite al usuario un mejor enfoque en la aplicación en lugar de los equipos, aunque se requerirá una gran cantidad de datos sobre el sistema y la habilidad para soportar el hardware y software, así como las aplicaciones. Muchas plantas han dedicado grupos que se centran en esta tarea. Estos grupos son, en muchos casos augumented por el personal de soporte del proveedor y/o contratos de soporte de mantenimiento.
DCS pueden emplear una o más estaciones de trabajo y se puede configurar en la estación de trabajo o por un ordenador personal fuera de línea. Comunicación local está a cargo de una red de control de la transmisión por par trenzado, coaxial o fibra óptica. Un servidor y/o procesador de aplicaciones se pueden incluir en el sistema para la recogida de cálculo, los datos extra, y la presentación de informes capacidad.
5.4 Aplicación en la industria de esquemas de control asistido por computadora
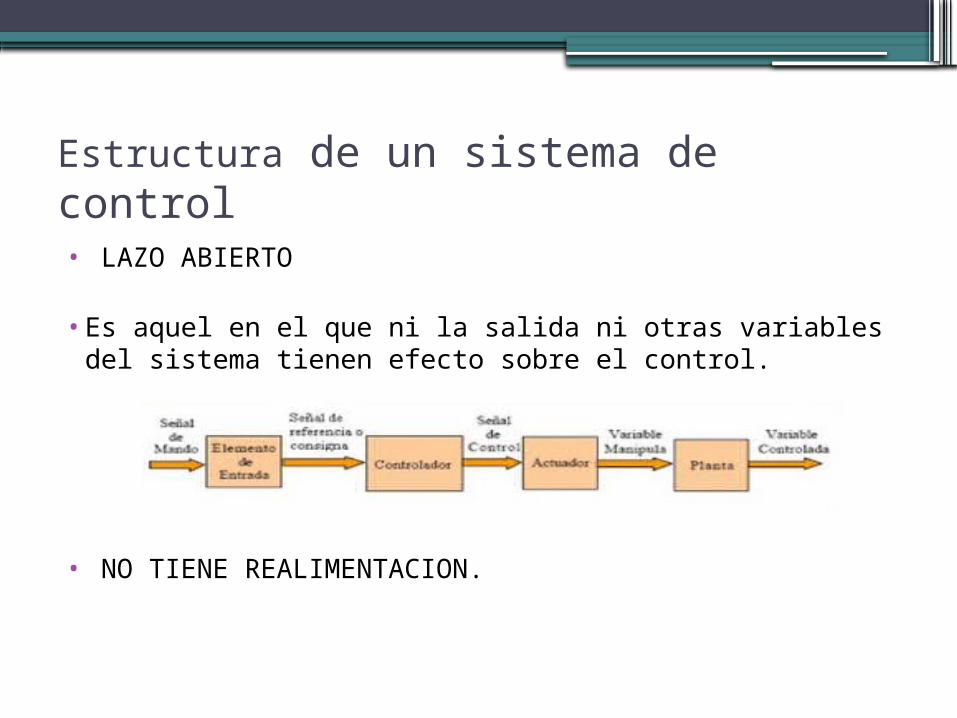
Estructura de un sistema de control
• LAZO ABIERTO
• Es aquel en el que ni la salida ni otras variables del sistema tienen efecto sobre el control.
• NO TIENE REALIMENTACION.
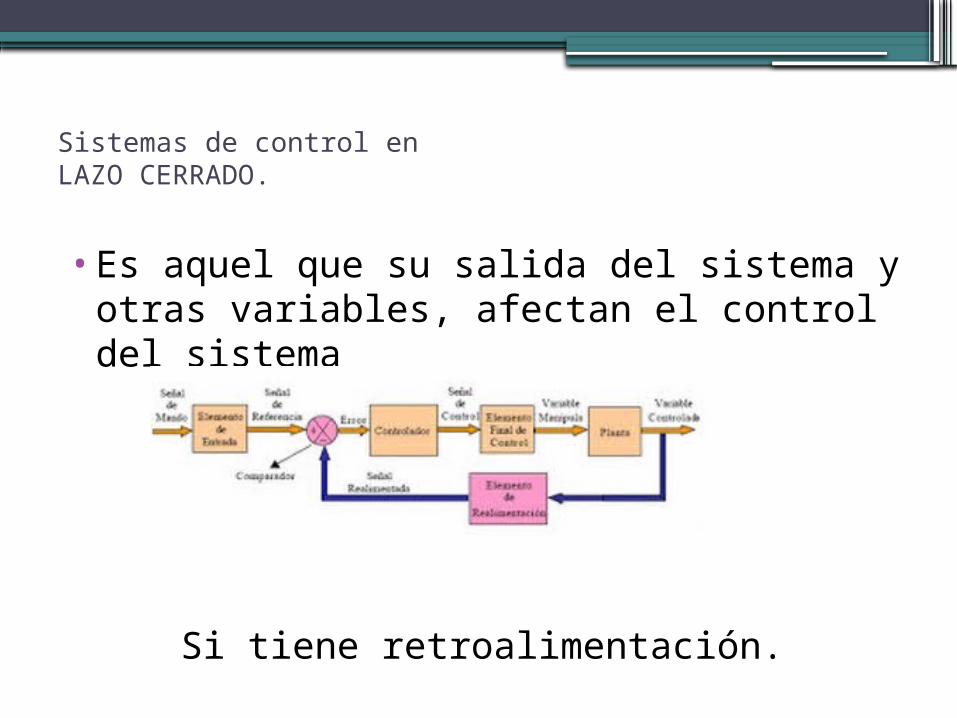
Sistemas de control en LAZO CERRADO.
•Es aquel que su salida del sistema y otras variables, afectan el control del sistema
Si tiene retroalimentación.

Tipos de control
Control digital directo
Control digital distribuido
Instrumentación industrial
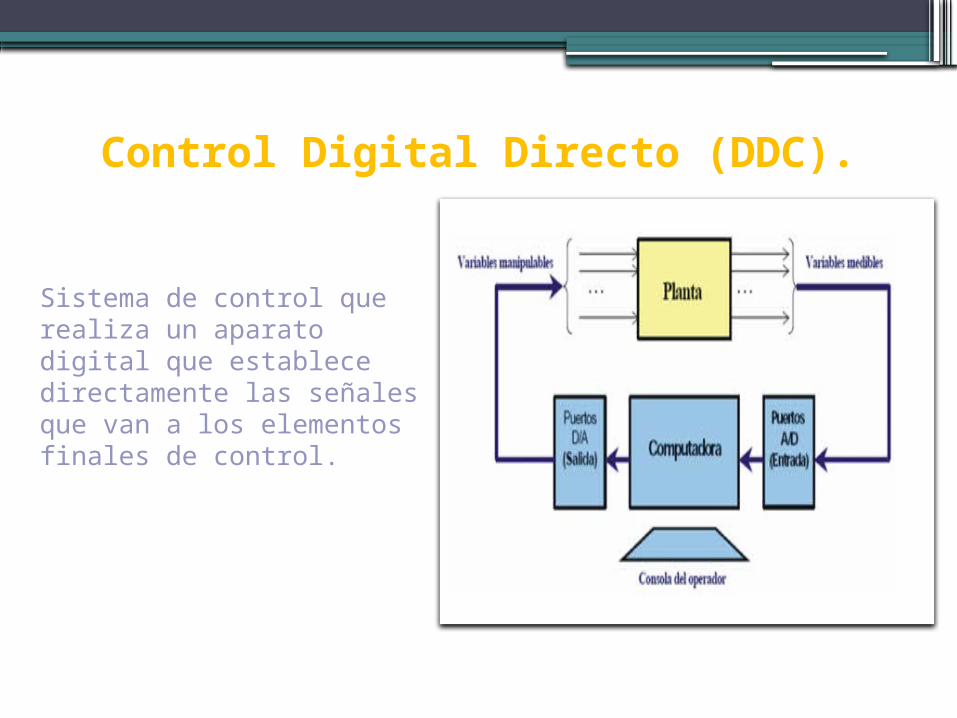
Control Digital Directo (DDC).
Sistema de control que realiza un aparato digital que establece directamente las señales que van a los elementos finales de control.
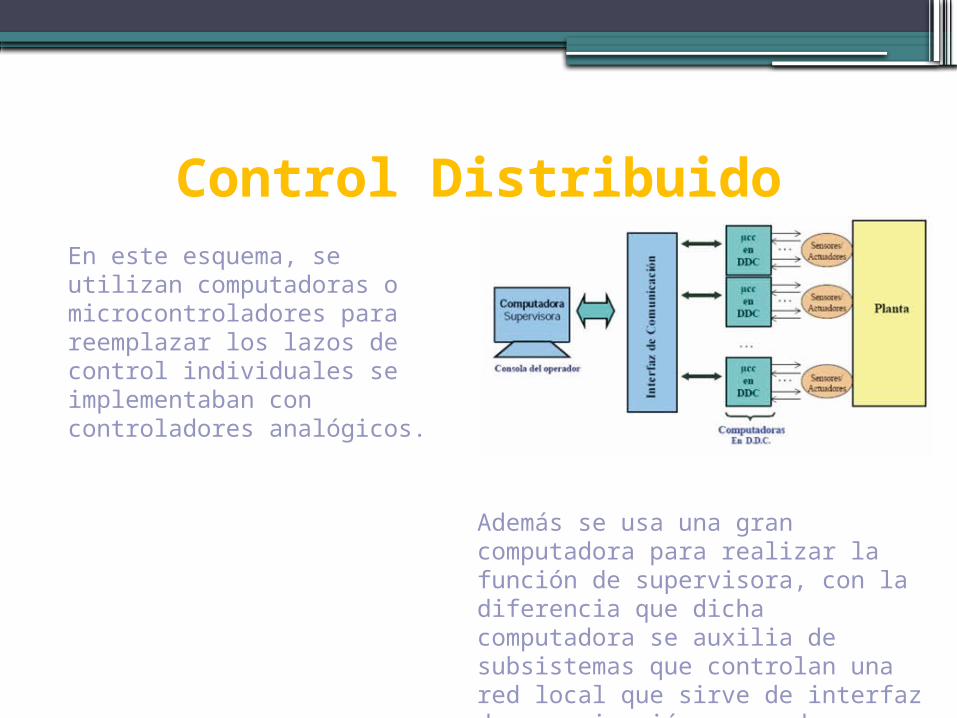
Control DistribuidoEn este esquema, se utilizan computadoras o microcontroladores para reemplazar los lazos de control individuales se implementaban con controladores analógicos.
Además se usa una gran computadora para realizar la función de supervisora, con la diferencia que dicha computadora se auxilia de subsistemas que controlan una red local que sirve de interfaz de comunicación con cada controlador.
Instrumentación Virtual
• Un instrumento virtual consiste de una computadora del tipo industrial, o una estación de trabajo, equipada con poderosos programas (software), hardware económico, tales como placas para insertar, y manejadores (drivers) que cumplen, en conjunto, las funciones de instrumentos tradicionales
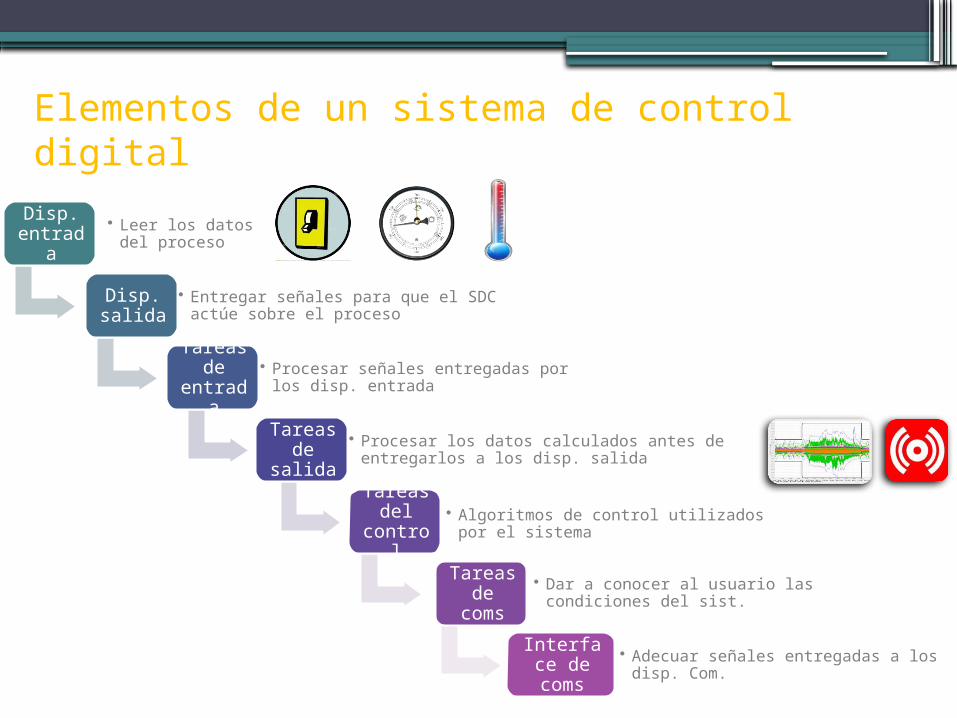
Elementos de un sistema de control digital
Disp. entrada
• Leer los datos del proceso
Disp. salida
• Entregar señales para que el SDC actúe sobre el proceso
Tareas de
entrada
• Procesar señales entregadas por los disp. entrada
Tareas de
salida
• Procesar los datos calculados antes de entregarlos a los disp. salida
Tareas del
control
• Algoritmos de control utilizados por el sistema
Tareas de
coms
• Dar a conocer al usuario las condiciones del sist.
Interface de coms
• Adecuar señales entregadas a los disp. Com.
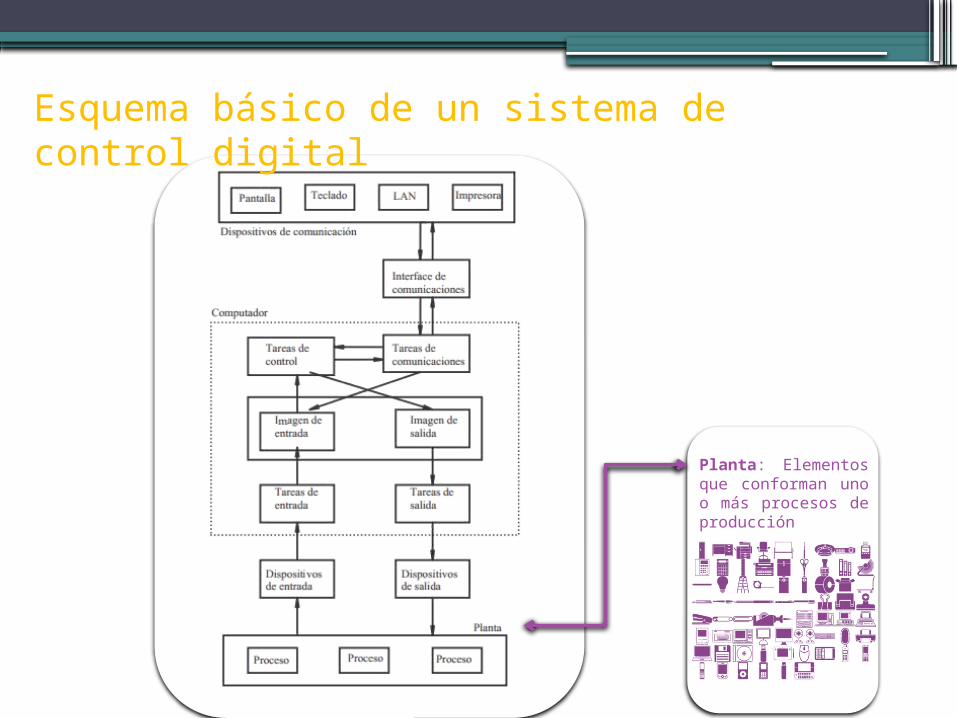
Esquema básico de un sistema de control digital
Planta: Elementos que conforman uno o más procesos de producción
•Sistemas en los cuales debe producirse la respuesta correcta en un espacio definido de tiempo. Si la respuesta de la computadora excede ese tiempo, se obtendrá una degradación del desempeño o un mal funcionamiento
Sistemas de Tiempo Real
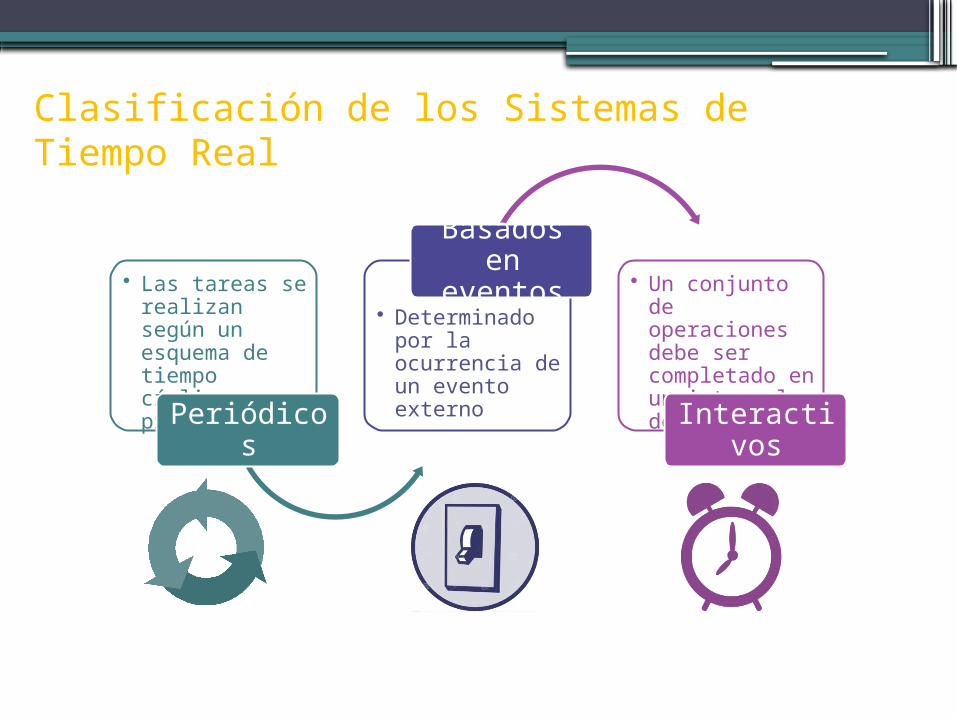
Clasificación de los Sistemas de Tiempo Real
• Las tareas se realizan según un esquema de tiempo cíclico predefinido
Periódicos
• Determinado por la ocurrencia de un evento externo
Basados en eventos • Un conjunto de
operaciones debe ser completado en un intervalo de tiempo
Interactivos
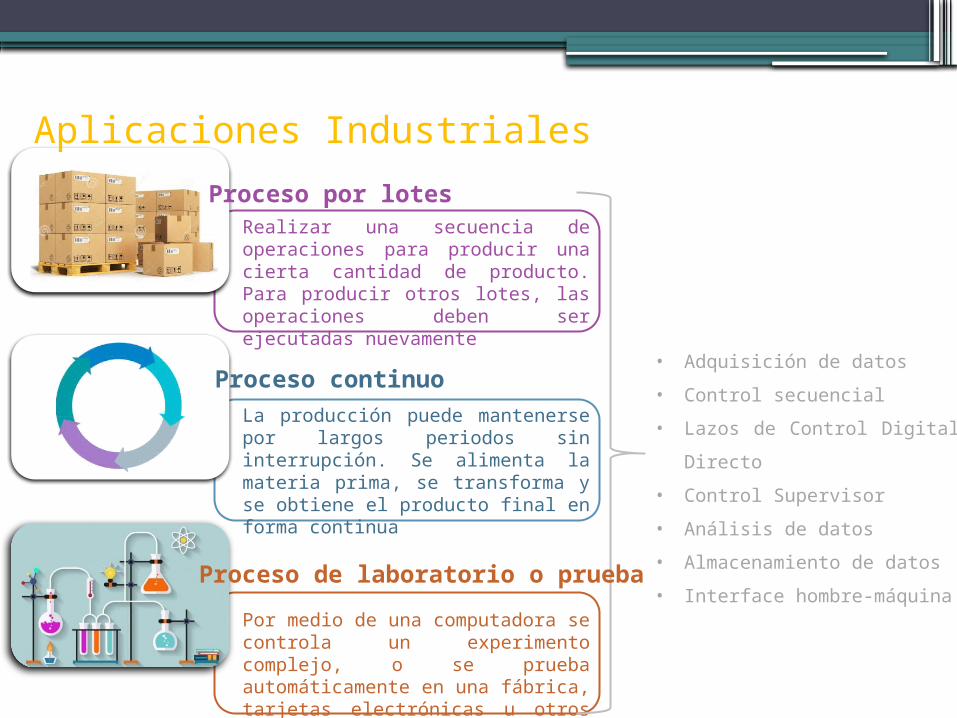
Aplicaciones Industriales
Realizar una secuencia de operaciones para producir una cierta cantidad de producto. Para producir otros lotes, las operaciones deben ser ejecutadas nuevamente
La producción puede mantenerse por largos periodos sin interrupción. Se alimenta la materia prima, se transforma y se obtiene el producto final en forma continua
Por medio de una computadora se controla un experimento complejo, o se prueba automáticamente en una fábrica, tarjetas electrónicas u otros equipos
• Adquisición de datos
• Control secuencial
• Lazos de Control Digital
Directo
• Control Supervisor
• Análisis de datos
• Almacenamiento de datos
• Interface hombre-máquina
Proceso por lotes
Proceso continuo
Proceso de laboratorio o prueba
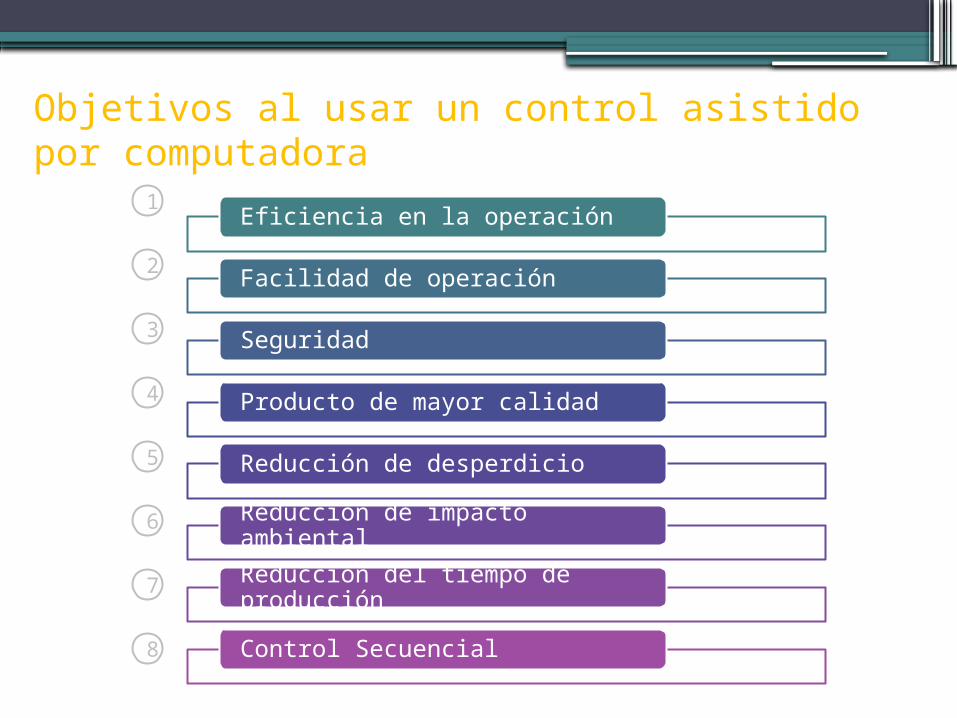
Objetivos al usar un control asistido por computadora
Eficiencia en la operación
Facilidad de operación
Seguridad
Producto de mayor calidad
Reducción de desperdicio
Reducción de impacto ambiental
Reducción del tiempo de producción
Control Secuencial
1
2
3
4
5
6
7
8
GRACIAS POR SU ATENCIÓN
![Actualidad IGN-CNIG unio · Horizon 2020 de la Unión Europea, bajo el acuerdo número 730562 [RadioNet]. ... Exposición de Instrumentación Geofísica Histórica en el Observatorio](https://img.pdfslide.net/doc/110x75/5f621568a2d08111002f0eaf/actualidad-ign-cnig-unio-horizon-2020-de-la-unin-europea-bajo-el-acuerdo-nmero.jpg)