Embed Size (px)
Citation preview
Schwingungen
Schwingungen haben eine zentrale Bedeutung in der Physik.Der Formalismus wird in sehr vielen Bereichen der Physik verwendet.
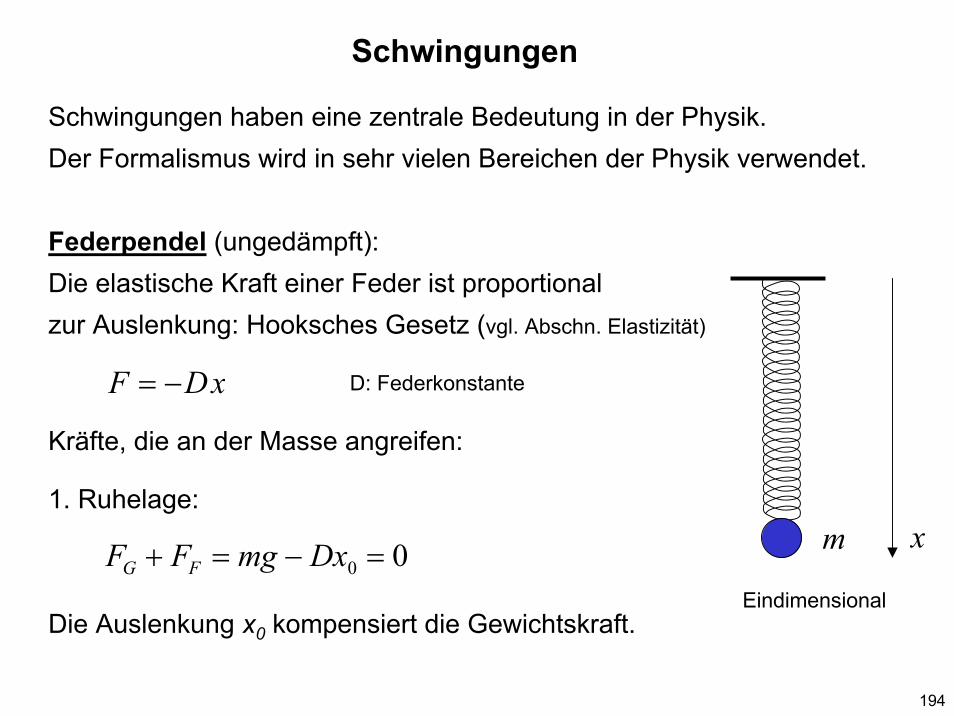
Federpendel (ungedämpft):Die elastische Kraft einer Feder ist proportionalzur Auslenkung: Hooksches Gesetz (vgl. Abschn. Elastizität)
Kräfte, die an der Masse angreifen:
1. Ruhelage:
Die Auslenkung x0 kompensiert die Gewichtskraft.
m x
xDF −=
Eindimensional
00 =−=+ DxmgFF FG
D: Federkonstante
194
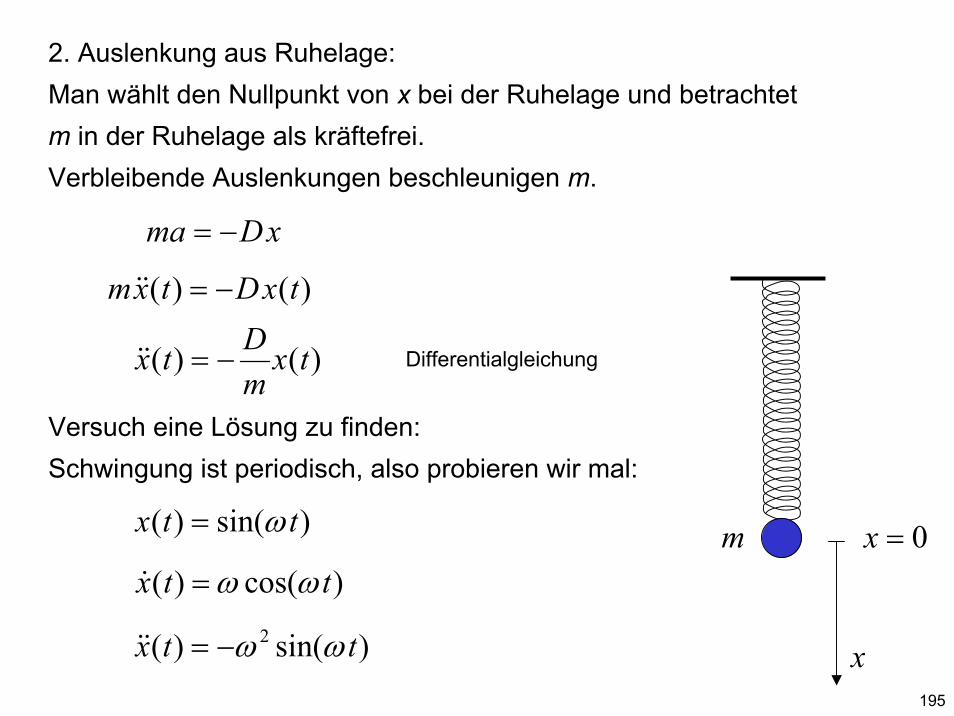
2. Auslenkung aus Ruhelage:Man wählt den Nullpunkt von x bei der Ruhelage und betrachtet m in der Ruhelage als kräftefrei.Verbleibende Auslenkungen beschleunigen m.
Versuch eine Lösung zu finden:Schwingung ist periodisch, also probieren wir mal:
m
x
xDma −=
)()( txDtxm −=&&
)()( txmDtx −=&& Differentialgleichung
)sin()( ttx ω=
)cos()( ttx ωω=&
)sin()( 2 ttx ωω−=&&
0=x
195
Einsetzen:
Ergibt Bestimmungsgleichung für den Parameter ω.
Die Funktion
ist eine Lösung der Differentialgleichung („harmonische Schwingung“).Die Frequenz der Schwingung ist durch Federkonstante und Masse festgelegt.
Schwingungsdauer:Eine volle Schwingung ist durchlaufen wenn also
)sin()sin(2 tmDt ωωω −=−
mD
=2ω
)sin()( ttx mD=
πω 2=T
DmT π
ωπ 22==
196
Suche nach weiteren Lösungen:Schwingungen mit anderer Amplitude und Phase sind auch möglich.Amplitude und Phase werden erst durch die Anfangsbedingungen festgelegt.
Alle Funktionen der Form
sind auch Lösung, denn
Einsetzen liefert ebenso
Die allgemeine Lösung der Differentialgleichung lautet damit
)sin()( ϕω += tAtx
)cos()( ϕωω += tAtx& )sin()( 2 ϕωω +−= tAtx&&
mD
=⇒ 2ω
)sin()sin(2 ϕωϕωω +−=+− tAmDtA
)sin()( ϕ+= tAtx mD A: Amplitude, ϕ: Phase
197
ϕsin)0( 0 Axx ==
Berechnung der Amplitude und Phase aus den Anfangsbedingungen:
Zwei Gleichungen mit zwei Unbekannten ist (eindeutig) lösbar:Dividieren liefert:
Einsetzen liefert A:
ϕcos)0( 0 mDAvx ==&
ϕϕϕ tan
cossin
0
0
Dm
Dm
vx
==
⎟⎟⎠
⎞⎜⎜⎝
⎛=
mD
vx
0
0atanϕ
ϕsin0xA =
Phase der Schwingung
Amplitude der Schwingung
198
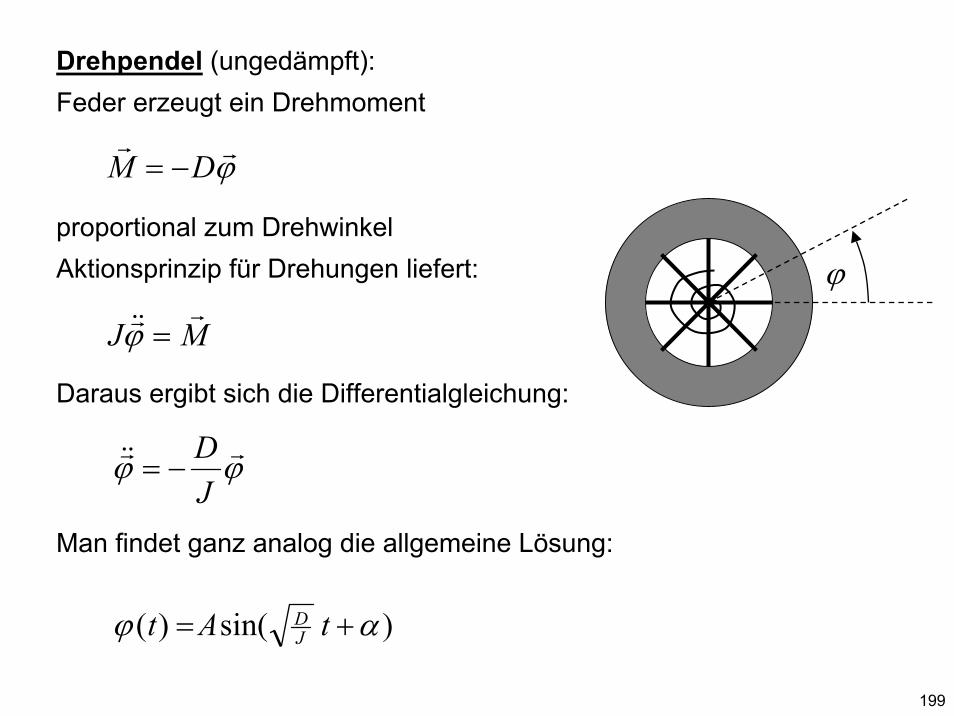
Drehpendel (ungedämpft):Feder erzeugt ein Drehmoment
proportional zum DrehwinkelAktionsprinzip für Drehungen liefert:
Daraus ergibt sich die Differentialgleichung:
Man findet ganz analog die allgemeine Lösung:
ϕrr
DM −=
MJr
&&r =ϕ
ϕ
ϕϕr&&r
JD
−=
)sin()( αϕ += tAt JD
199
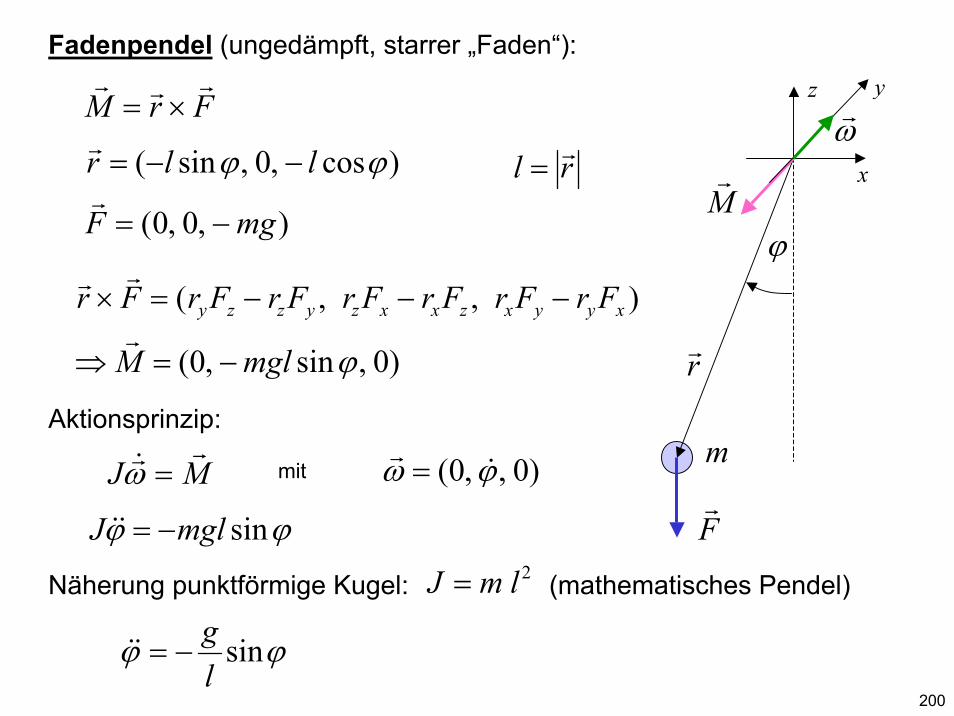
Fadenpendel (ungedämpft, starrer „Faden“):
Aktionsprinzip:
Näherung punktförmige Kugel: (mathematisches Pendel)
m
ϕ
rr
x
yzFrMrrr
×=
Fr
Mr
ωr
)cos,0,sin( ϕϕ llr −−=r
),0,0( mgF −=r
)0,sin,0( ϕmglM −=⇒r
),,( xyyxzxxzyzzy FrFrFrFrFrFrFr −−−=×rr
MJr
&r =ω
2lmJ =
ϕϕ sinmglJ −=&&
ϕϕ sinlg
−=&&
)0,,0( ϕω &r=mit
200
rl r=
Eine Lösung der Differentialgleichung
kann nicht als einfache Funktion hingeschrieben werden.Eine Möglichkeit: Differentialgleichung nähern für kleine Auslenkungen:
Damit ergibt sich
Ansatz für die Funktionen:
ϕϕ sinlg
−=&&
44 344 21K
ϕ
ϕϕϕϕ kleinefür klein
5!5
13!3
1sin −+−=
ϕϕlg
−=&&
)sin()( αϕ +Ω= tAt
)cos()( αϕ +ΩΩ= tAt&
)sin()( 2 αϕ +ΩΩ−= tAt&&201
Einsetzen in Dgl. liefert
die Bestimmungsgleichung für die Frequenz:
Allgemeine Lösung für kleine Auslenkungen ist also:
Amplitude A und Phase α müssen aus den Anfangsbedingungen bestimmt werden
)sin()sin(2 αα +Ω−=+ΩΩ− tAlgtA
glT
lg π22 =⇒=Ω
)sin()( αϕ += tAt lg
202
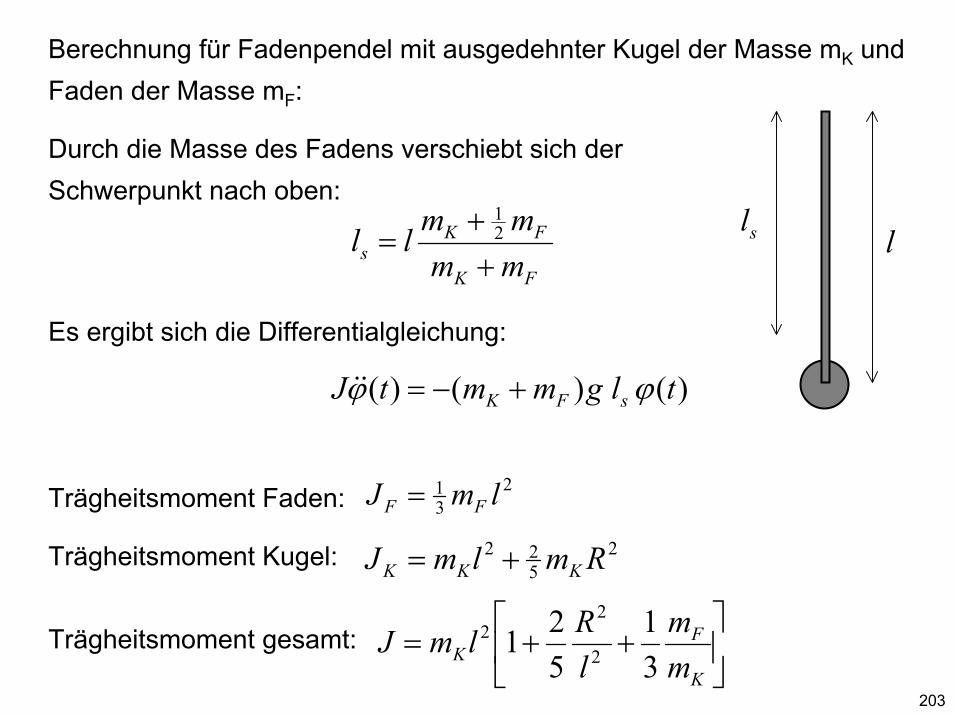
Berechnung für Fadenpendel mit ausgedehnter Kugel der Masse mK und Faden der Masse mF:
Durch die Masse des Fadens verschiebt sich der Schwerpunkt nach oben:
Es ergibt sich die Differentialgleichung:
Trägheitsmoment Faden:
Trägheitsmoment Kugel:
Trägheitsmoment gesamt:
lsl
)()()( tlgmmtJ sFK ϕϕ +−=&&
FK
FKs mm
mmll++
= 21
231 lmJ FF =
2522 RmlmJ KKK +=
⎥⎦
⎤⎢⎣
⎡++=
K
FK m
mlRlmJ
31
521 2
22
203
203b
)()()(31
521 2
1
2
22 t
mmmmlgmmt
mm
lRlm
FK
FKFK
K
FK ϕϕ
++
+−=⎥⎦
⎤⎢⎣
⎡++ &&
Alles zusammengefasst ergibt die Differentialgleichung:
oder vereinfacht geschrieben
mit
⇒ Schwingungsdauer:
)()( 2 tt ϕωϕ −=&&
K
F
K
F
mm
lRmm
lg
31
521
211
2
22
++
+=ω
K
F
K
F
mmmm
lR
glT
211
31
521
22
2
+
++⋅= π
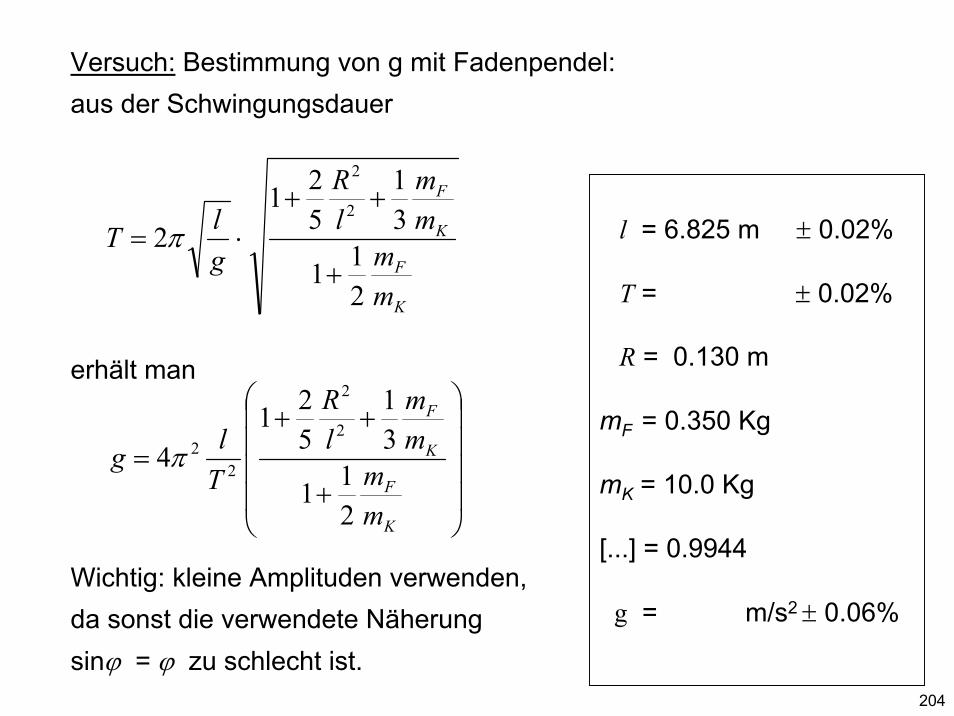
Versuch: Bestimmung von g mit Fadenpendel:aus der Schwingungsdauer
erhält man
Wichtig: kleine Amplituden verwenden,da sonst die verwendete Näherungsinϕ = ϕ zu schlecht ist.
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
+
++=
K
F
K
F
mmmm
lR
Tlg
211
31
521
42
2
22π
l = 6.825 m ± 0.02%
T = ± 0.02%
R = 0.130 m
mF = 0.350 Kg
mK = 10.0 Kg
[...] = 0.9944
g = m/s2 ± 0.06%
204
K
F
K
F
mmmm
lR
glT
211
31
521
22
2
+
++⋅= π
Numerische Lösung der exakten Differentialgleichung:
Umschreiben in zwei Gleichungen erster Ordnung:
Schritt für Schritt rechnen:
)(sin)( tlgt ϕϕ −=&&
)(sin)( tlgt ϕω −=&
)()( tt ωϕ =&
ttttt Δ+=Δ+ )()()( ωϕϕ
ttlgttt Δ⎟
⎠⎞
⎜⎝⎛−=Δ+ )(sin)()( ϕωω
0)0( ϕϕ =
0)0( ωω =
205
Berechnung auf dem Computer
Parameter: L = 1m, g = 9.81 m/s2
Anfangsbedingungen: ϕ = 45°, ω = 0 rad/sϕ = 10°, ω = 0 rad/s kleine Auslenkungϕ = 90°, ω = 0 rad/s Zunahme von Tϕ = 135°, ω = 0 rad/s Zunahme von Tϕ = 170°, ω = 0 rad/s deutlich anharmonischϕ = 178°, ω = 0 rad/s sehr anharmonischϕ = 179.99°, ω = 0 rad/s sehr großes T
ϕ = 0°, ω = 5 rad/s Schwingungϕ = 0°, ω = 6.3 rad/s Überschlagϕ = 0°, ω = 8 rad/s
206
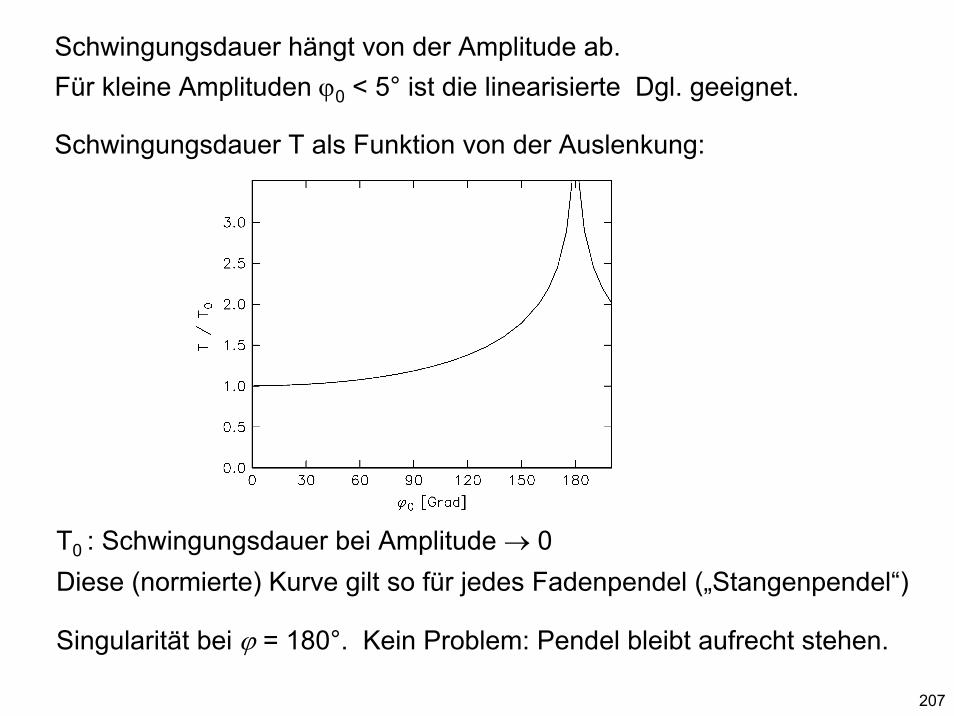
Schwingungsdauer hängt von der Amplitude ab.Für kleine Amplituden ϕ0 < 5° ist die linearisierte Dgl. geeignet.
Schwingungsdauer T als Funktion von der Auslenkung:
T0 : Schwingungsdauer bei Amplitude → 0 Diese (normierte) Kurve gilt so für jedes Fadenpendel („Stangenpendel“)
Singularität bei ϕ = 180°. Kein Problem: Pendel bleibt aufrecht stehen.
207
Wenn die Schwingungsdauer von der Auslenkung abhängt ergebensich Bewegungen, die nicht sinusförmig sind.→ Anharmonische Schwingung
Beispiel:Mit Laserpulsen Anregung der Elektronen in Festkörpern zu Schwingungen:schwacher Laserpuls → kleine Amplitude → harmonische Schwingung starker Laserpuls → große Amplitude → anharmonische Schwingung
208
Federpendel: Komplexer Ansatz zur Lösung der Dgl.
Die Bewegung wird vollständig beschrieben durch die Funktion
Aber es gibt noch weitere Lösungen der selben Differentialgleichung.→ Komplexe Lösungen (Funktionen mit komplexen Zahlen)
Die komplexe Funktion selbst ist nicht für die Physik relevant!Die physikalisch relevante Funktion ist reell.
Suche der komplexen Lösung und anschließend Berechnung einer reellen Lösung aus den komplexen Lösungen.
Mit komplexem Lösungsansatz lassen sich auch gedämpfte und angeregte Schwingungen behandeln.
)sin()( ϕ+= tAtx mD
209
Komplexe Zahlen:
Addition:
Multiplikation:
Reelle Zahlen sind Teil der komplexen Zahlen (Imaginärteil = 0)
Komplexe Exponentialfunktion:
(Eulersche Formel)
ilImaginärte : Realteil, :)( baibac +=
)Im(),Re( cbca ==
)()()( ybixaiyxiba +++=+++
)()()( aybxibyaxiyxiba ++−=+⋅+
)sin(cos bibaeibeaeibae +==+
1−=⋅ ii
210
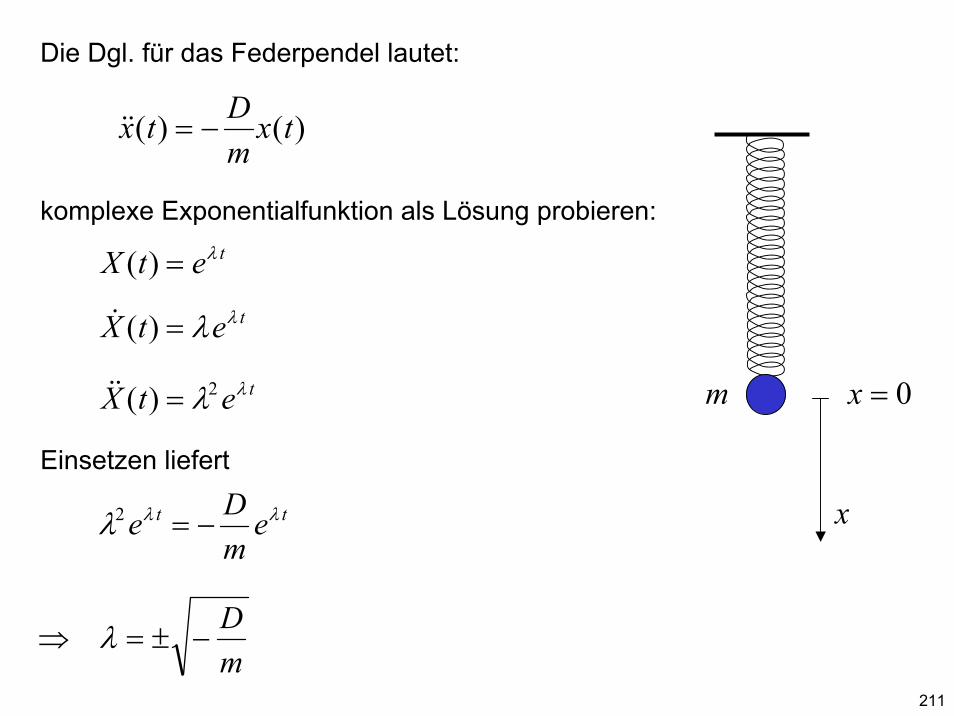
Die Dgl. für das Federpendel lautet:
komplexe Exponentialfunktion als Lösung probieren:
Einsetzen liefert
m
x
0=x
)()( txmDtx −=&&
tetX λ=)(tetX λλ=)(&
tetX λλ2)( =&&
tt emDe λλλ −=2
mD
−±=⇒ λ
211
λ Ist rein imaginär und wir schreiben abgekürzt:
Die allgemeine reelle Lösung ergibt sich aus einer Linearkombinationder beiden komplexen Lösungen:
mit einer beliebigen komplexen Zahl und ihrer konjugiertkomplexen Zahl .
Die Lösung kann in die gewohnte Form
umgeformt werden, wobei für die Konstanten gilt:
und
)cos()( ϕω += tAtx
mDi =±= ωωλ mit
tbtaecectx titi ωωωω sin2cos2)( * −=+= −
ibac +
212
=ibac −=*
)cos(2 ϕAa = )sin(2 ϕAb =
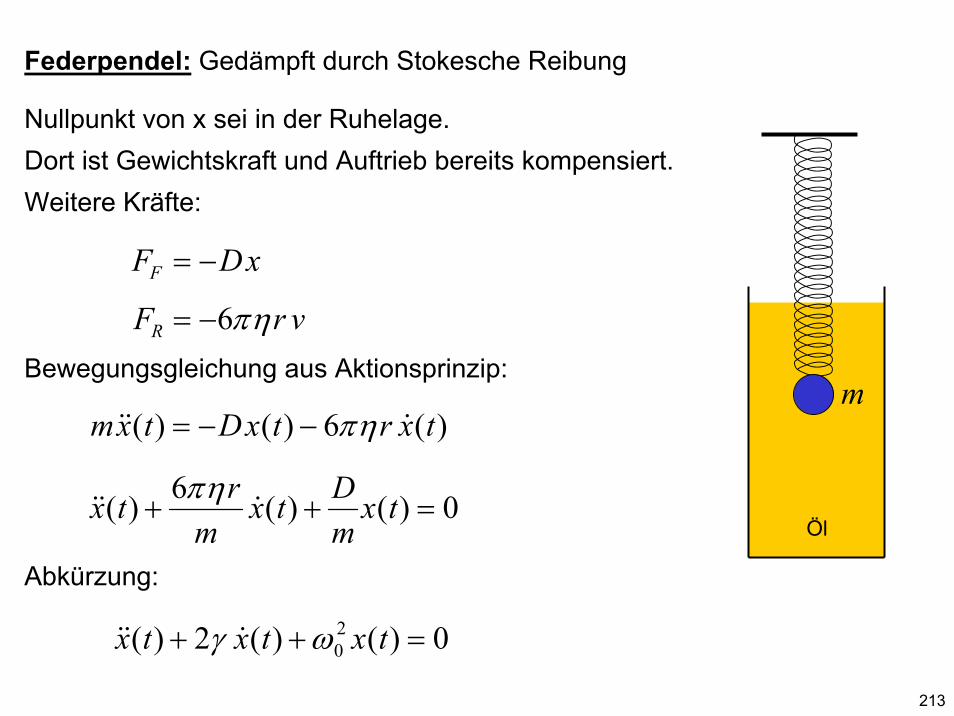
Federpendel: Gedämpft durch Stokesche Reibung
Nullpunkt von x sei in der Ruhelage. Dort ist Gewichtskraft und Auftrieb bereits kompensiert.Weitere Kräfte:
Bewegungsgleichung aus Aktionsprinzip:
Abkürzung:
m
xDFF −=
vrFR ηπ6−=
)(6)()( txrtxDtxm &&& ηπ−−=
0)()(6)( =++ txmDtx
mrtx &&&
ηπ
0)()(2)( 20 =++ txtxtx ωγ &&&
Öl
213
tetX λ=)(
Ansatz
λ: komplex, A,ϕ: reelle Amplitude und Phase
tetX λλ=)(&
tetX λλ2)( =&&
Einsetzen:
Daraus erhält man die Bestimmungsgleichung für λ:
Quadratische Gleichung mit den Lösungen:
02 20
2 =++ ttt eee λλλ ωλγλ
02 20
2 =++ ωλγλ
20
22/1 ωγγλ −±−=
214
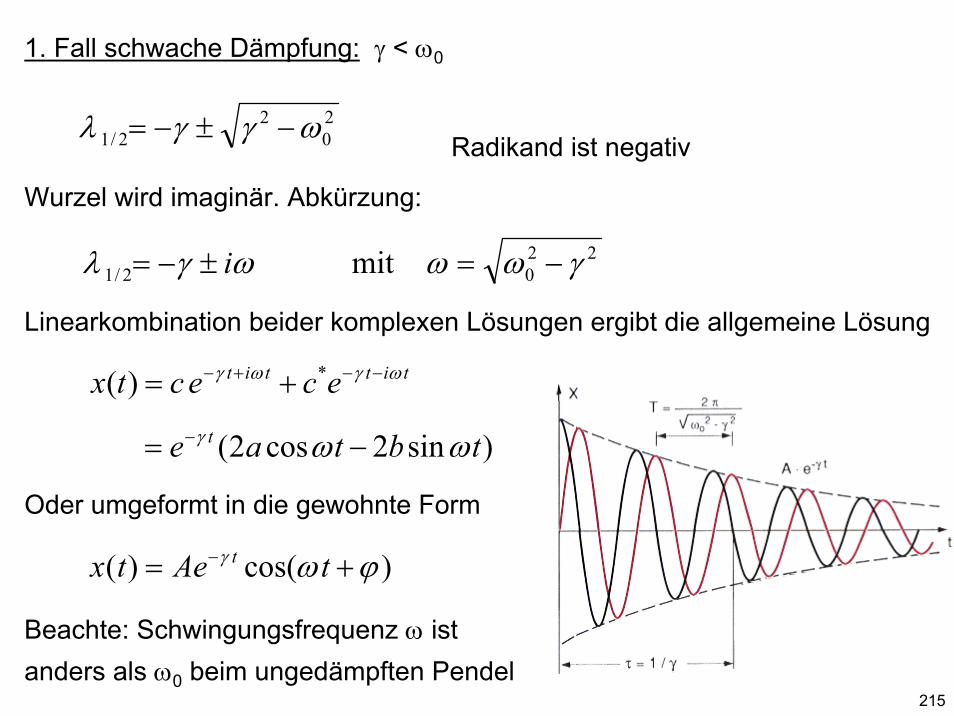
1. Fall schwache Dämpfung: γ < ω0
Wurzel wird imaginär. Abkürzung:
Linearkombination beider komplexen Lösungen ergibt die allgemeine Lösung
Oder umgeformt in die gewohnte Form
Beachte: Schwingungsfrequenz ω ist anders als ω0 beim ungedämpften Pendel
20
22/1 ωγγλ −±−=
Radikand ist negativ
2202/1 mit γωωωγλ −=±−= i
tittit ecectx ωγωγ −−+− += *)(
)sin2cos2( tbtae t ωωγ −= −
)cos()( ϕωγ += − tAetx t
215
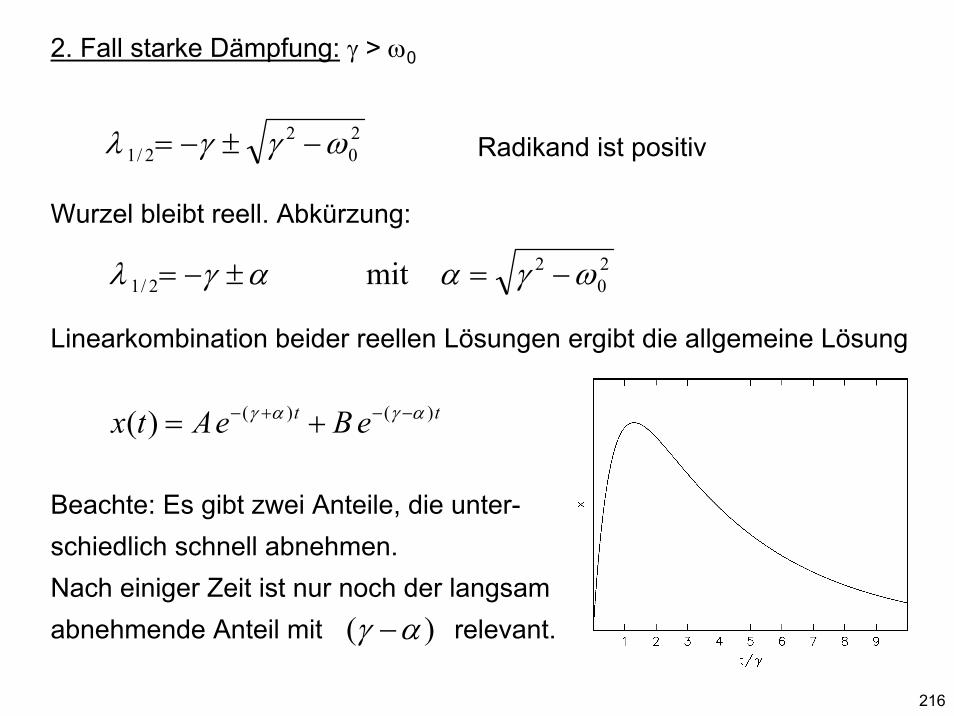
2. Fall starke Dämpfung: γ > ω0
Wurzel bleibt reell. Abkürzung:
Linearkombination beider reellen Lösungen ergibt die allgemeine Lösung
Beachte: Es gibt zwei Anteile, die unter-schiedlich schnell abnehmen. Nach einiger Zeit ist nur noch der langsamabnehmende Anteil mit relevant.
20
22/1 ωγγλ −±−= Radikand ist positiv
20
22/1 mit ωγααγλ −=±−=
tt eBeAtx )()()( αγαγ −−+− +=
216
)( αγ −
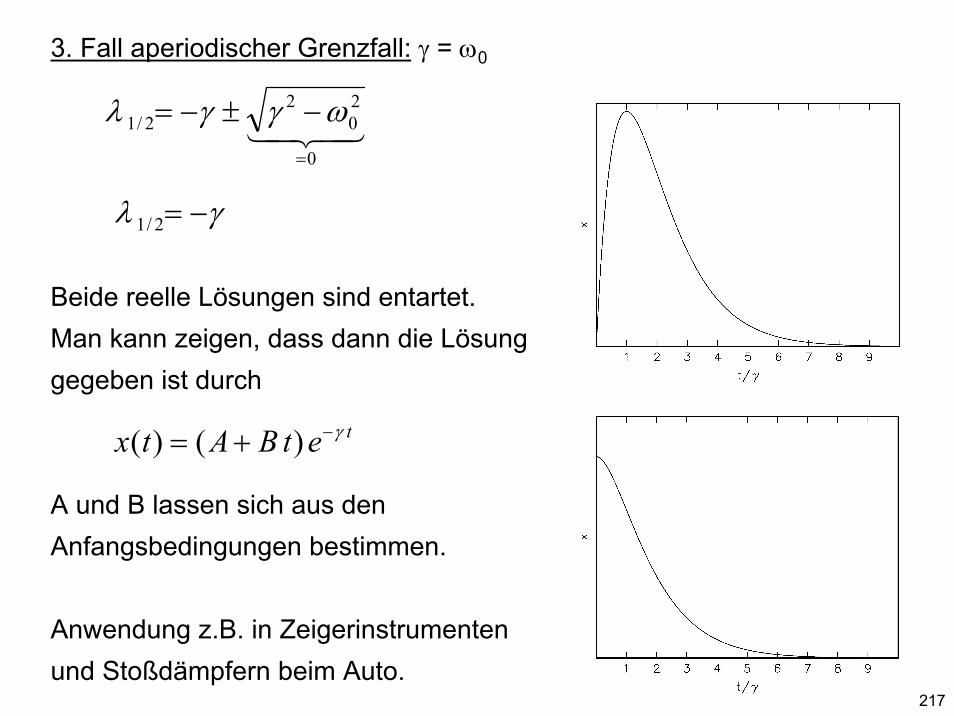
3. Fall aperiodischer Grenzfall: γ = ω0
Beide reelle Lösungen sind entartet. Man kann zeigen, dass dann die Lösung gegeben ist durch
A und B lassen sich aus den Anfangsbedingungen bestimmen.
Anwendung z.B. in Zeigerinstrumentenund Stoßdämpfern beim Auto.
434210
20
22/1
=
−±−= ωγγλ
γλ −=2/1
tetBAtx γ−+= )()(
217
Federpendel: periodisch angeregt (erzwungene Schwingung)
Es wirke eine äußere Kraft
Kräftebilanz und Dgl:
Abkürzungen:
Die äußere Kraft prägt der Schwingung die Frequenz auf.Lösungsansatz:
tFtFA ωcos)( 0=
tmFtx
mDtx
mrtx ωηπ cos)()(6)( 0=++ &&&
m
Öl
tKtxtxtx ωωγ cos)()(2)( 20 =++ &&&
)cos()cos()( 2111 ϕωϕωγ +++= − tAteAtx t
218
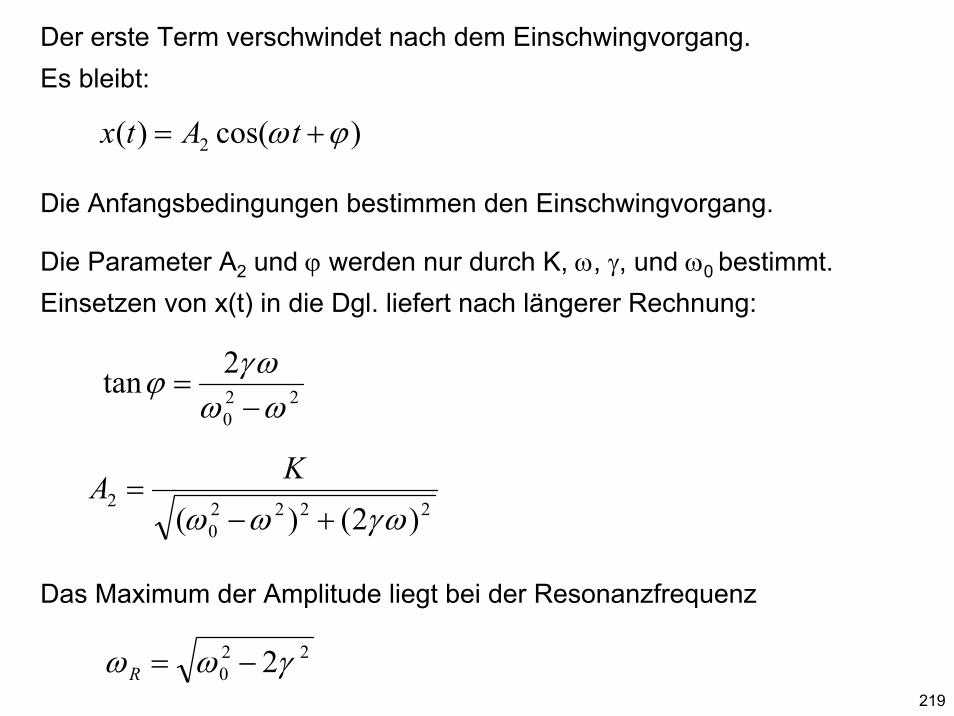
Der erste Term verschwindet nach dem Einschwingvorgang.Es bleibt:
Die Anfangsbedingungen bestimmen den Einschwingvorgang.
Die Parameter A2 und ϕ werden nur durch K, ω, γ, und ω0 bestimmt.Einsetzen von x(t) in die Dgl. liefert nach längerer Rechnung:
Das Maximum der Amplitude liegt bei der Resonanzfrequenz
)cos()( 2 ϕω += tAtx
220
2tanωωωγϕ−
=
22220
2)2()( ωγωω +−
=KA
220 2γωω −=R
219
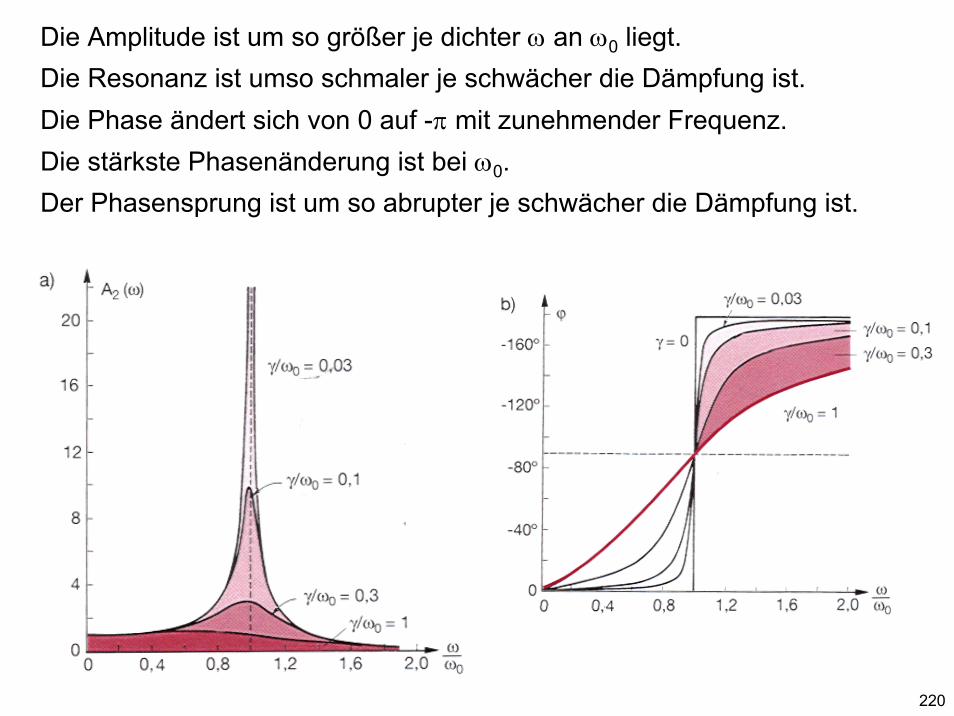
Die Amplitude ist um so größer je dichter ω an ω0 liegt.Die Resonanz ist umso schmaler je schwächer die Dämpfung ist.Die Phase ändert sich von 0 auf -π mit zunehmender Frequenz.Die stärkste Phasenänderung ist bei ω0.Der Phasensprung ist um so abrupter je schwächer die Dämpfung ist.
220
Energiebilanz bei Schwingungen:
1. Ungedämpfte harmonische Schwingungen:
Mit
folgt
Die in der Schwingung gespeicherte Energie ist proportional zumAmplitudenquadrat.
)(cos222212
21 ϕωω +== tAmmvEkin
)sin()( ϕω += tAtx )cos()( ϕωω += tAtx&
44444 344444 211
))(cos)((sin 22221
=
+++=+= ϕωϕω ttADEEE potkin
)(sin22212
21 ϕω +== tADxDEpot
221
2. Schwach gedämpfte harmonische Schwingungen:
Nach einer Schwingung ist die Amplitude:
Auch die maximale Auslenkung verringert sich um
Die im Mittel abgegebene Leistung ist
Die Energie wird nicht kontinuierlich abgegeben, denn
)(6 txrFR &ηπ−=
)cos()( ϕωγ += − tAetx t 220mit γωω −=
Tt
Tt
etAeTtAe
txTtx γ
γ
γ
ϕωϕωω −
−
+−
=+
++=
+)cos(
)cos()(
)( )(
Te γ−
)1()( 22212
212
21 −=−=Δ −− TT
pot eADADAeDE γγ
γγ
222
21 )1( DA
TeAD
TE
PT
pot ≈−
=Δ
=−
222
3. Erzwungene Schwingung:
Nach dem Einschwingvorgang ist
Die in der Schwingung gespeicherte Energie
ist zeitunabhängig.Die aus der Anregung aufgenommene Leistung geht direkt in die Reibung
Über eine Periode umgesetzte Arbeit:
)cos()( 2 ϕω += tAtx
potkin EEE +=
)(sin22 2222
2 ϕωωγγ +==⋅= tAmvmvFP Rrr
44 344 212/
d)(sin2d 2222
T
ttAmtPWTt
t
Tt
t
=
+== ∫∫++
ϕωωγ
223
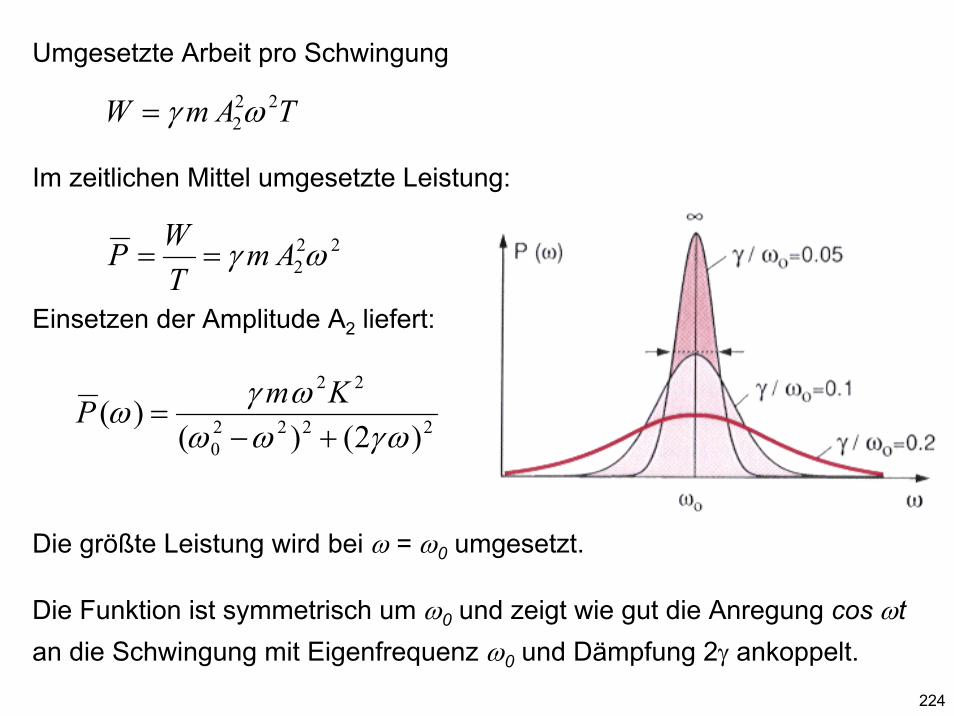
Umgesetzte Arbeit pro Schwingung
Im zeitlichen Mittel umgesetzte Leistung:
Einsetzen der Amplitude A2 liefert:
Die größte Leistung wird bei ω = ω0 umgesetzt.
Die Funktion ist symmetrisch um ω0 und zeigt wie gut die Anregung cos ωtan die Schwingung mit Eigenfrequenz ω0 und Dämpfung 2γ ankoppelt.
TAmW 222ωγ=
222ωγ Am
TWP ==
22220
22
)2()()(
ωγωωωγω+−
=KmP
224







![Proportionale Zuordnungen1 [Kompatibilitätsmodus]bastizimmer.org/.../Proportionale_Zuordnungen1.pdf · Lineare Zuordnung mit Nullpunkt (0/0) Nullpunkt ... Beschreibe den Tarif mit](https://img.pdfslide.net/doc/110x75/5b9fa36e09d3f242318b5546/proportionale-zuordnungen1-kompatibilitaetsmodus-lineare-zuordnung-mit-nullpunkt.jpg)

![Einleitung // FormelzeichenEinleitung // Formelzeichen V a1 [mm] Auslenkung, mittig am Distanzringsatz a2 [mm] Auslenkung, Kollerbahn innen b1 [mm] Radius, Mitte Distanzringsatz b2](https://img.pdfslide.net/doc/110x75/610e0f819beb130df7373b8a/einleitung-formelzeichen-einleitung-formelzeichen-v-a1-mm-auslenkung-mittig.jpg)










![Proportionale Zuordnungen [Kompatibilitätsmodus]bastizimmer.org/.../Proportionale_Zuordnungen.pdf · Lineare Zuordnung mit Nullpunkt (0/0) Nullpunkt ... Beschreibe den Tarif mit](https://img.pdfslide.net/doc/110x75/5b9fa36e09d3f242318b554c/proportionale-zuordnungen-kompatibilitaetsmodus-lineare-zuordnung-mit-nullpunkt.jpg)








