Embed Size (px)
Citation preview

华东理工大学第五届工程创新大赛
暨“搬运机器人设计挑战赛”
1.竞赛主题
本届竞赛的主题为“搬运机器人设计挑战赛”。 要求各参赛队自主完成搬运机器人的构思、设计、制作及组装调试,完成一
台符合大赛命题的可通过手机遥控运行的机械电子装置,并按照比赛规则完成挑
战。
2.竞赛命题
设计一种具有搬运功能的机器人,其部件通过切割板材、3D 打印等方法制
作,并与电子器件一起组装和调试,其通过手机蓝牙控制实现移动并搬运物体到
指定区域的机械电子装置。
规则细则:
使用提供的材料(可添加轴承、轴、螺丝、轮子等非电控类器件),通过设计及优
化机械结构,合理使用电子器件,完成一种具有搬运功能的机器人的制作并完成
比赛。比赛通过最终用时确定比赛结果。评分标准参见比赛评分标准,材料提供
与制作具体要求参见设计要求。比赛场地参见比赛场地。
比赛场地:
比赛场地分为三个区域:出发区、通过区和到达区
出发区尺寸为 600x600mm,该区域放置需要搬运的物体;
通过区为一上不封顶通道,宽度为 220mm,总长为近 3500mm;
到达区域为比赛终点,需要通过与水平面呈 5°夹角长度为 500mm 的斜坡
到达。
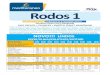
比赛过程为装载搬运位于出发区边长为 30mm 的立方体和直径为 30mm 的
球体,3D 打印制作,材料为 PLA,单个物体重量<20g,到达比赛终点,如图 1
所示。

图 1 比赛场地
3.设计要求
堆积木机器人的设计在满足功能要求的前提下要结构合理、易制作、同时体
现出工程及创新性。
机器人使用电源为 9V 方型碱性电池; 线路板为: Arduino、HC-5蓝牙模块;
动力驱动为:直流减速电机(两个)和舵机 ,如图 2 所示

图 2 电源、舵机、Arduino、蓝牙开发板、直流电机
物品 数量
直流电机、车轮 2 件
9G舵机(9G扭矩1.4KG) 2 件
HC-05 蓝牙模块 1 件 Arduino UNO R3 板、L298N 驱动模块 各 1件 9V 电池和电池扣线 1 套
注:报名成功并完成初步的设计方案(具体的想法、方案、数字建模或完成部分实体制作)
才发放以上材料(可以自主选择电子器件)。
3.1 遥控机器人设计及制作要求:
a、主体长≤130mm,宽≤130mm,同时在比赛过程中不能有部件脱离主体
结构;
b、 各参赛队独立完成机器人的设计及制作,同时该机构通过手机链接蓝牙
模块实现遥控控制以完成挑战;
c、参赛组可由 2-3 人组成,鼓励跨专业组队完成比赛。
3.2 其他所需材料及部件
比赛所需要控制电路板、电机和轴承等部件均统一提供给各参赛队,零部
件的加工、制作和安装调试校工程训练中心提供支持。
4、比赛环节构成
a、机器人由各组自行设计;
b、主要部件亚克力、密度板材切割、3D 打印,工程训练中心统一安排时
间,自主完成;
c、部件组装、调试、及运行测试自主完成;
d、按照比赛进程有序完成比赛;
e、公布比赛成绩、颁奖。

比赛评分标准
1、现场比赛规则及挑战要求:
1.1 比赛要求:
从始发位置出发,装载立方体或者圆球(不破坏比赛场地的情况下)到达比
赛终点,用时最少者获胜。
1.2 比赛准备及计时:
每个参赛队有两次比赛机会,取最好成绩为比赛成绩。
1.3 比赛评分标准:
比赛根据所装载物体及数量的不同按照以下规则计算比赛用时:
比赛用时=实际用时/难度系数
难度系数确定方法:
a、装载 1 个球体到达终点难度系数为 1,2 个难度系数为 1.2,3 个为 1.5;
b、装载 1 个立方体到达终点难度系数为 1.5,2 个难度系数为 2,3 个为 3。
华东理工大学第五届工程创新大赛流程
1、报名日期:11 月 15 日—11 月 25 日
2、比赛说明及动员:具体时间另行通知
3、作品制作、调试:11.25-12.25 日,地点:奉贤校区 8 号楼南楼 303 室
4、作品测试:12 月 25 日下午(暂定),地点:奉贤校区 8 号楼南楼 303 室
5、颁奖:12 月 25 日(暂定),地点:奉贤校区 8 号楼南楼



![Camelot report November 2019...u o } / v u ] ^ Z } } o í ð ì í í ñ Z ^ ^ } µ Z } } l ] v P U ^ ñ ó ì ì ò W Z } v ò ì ñ r ò õ ò r ð ð ì ì & Æ ò ì ñ r ò õ](https://img.pdfslide.net/doc/110x75/5f3a86d7a3e2a112230c0cbb/camelot-report-november-2019-u-o-v-u-z-o-z-.jpg)







![PRIMARIA ESPERTI AVVISO PER L'INDIVIDUAZIONE DI … PER L... · v } m x x x ] } ] } v } he/ k j _ ¦ í ó x ì ð ò u ì ì d/'>/kz/ y dk y / ¦ ð ð x î ñ ò u ì ì v s/^dK](https://img.pdfslide.net/doc/110x75/5d5303b988c9931f2f8b892d/primaria-esperti-avviso-per-lindividuazione-di-per-l-v-m-x-x-x-.jpg)





![Z o Ì ] } v & ] v v Ì ] ] ^ u o ï ì ì ò î ì ... - RDMrdmgroup.com/.../2018/05/1-Relazione-1...completa.pdf · Z o Ì ] } v & ] v v Ì ] ] ^ u o ï ì ì ò î ì í ò 5,&$9,](https://img.pdfslide.net/doc/110x75/5f09b1857e708231d4281043/z-o-oe-v-v-v-oe-u-o-z-o-oe-v-.jpg)
![E ì ì ò ì ô ï ó ì ì ò ì ô î ì ï ó , sZK> d , sZK> d r î ì ... · / lEDdD l&DDd& D d ] }D } o } D ] ] v d ] } î ì í õ î ì í ô î ì í ó î ì í ò î ì](https://img.pdfslide.net/doc/110x75/5fb6c4d1df6a3138655e99aa/e-szk-d-szk-d-r-.jpg)
![] u o v & v µ ] î ì í ò J d o µ } u ] ( ] > ] Z ] µ u ð ô À...] u o v & v µ ] î ì í ò J ï ò À î í Z ï òs í ó U ñ Z ï ò À í ð Z ï ò À í í U ò Z ï](https://img.pdfslide.net/doc/110x75/605369fb7e9f1261627e8698/-u-o-v-v-j-d-o-u-z-u-.jpg)



![I-010...ò î ñ Z p ¤ ò { Y ¤ * i j C [ G s X [ é æ }1 Ì g U ½ X Ë y N g ß Ô O J p ¢ ð ½ g Ñ ^ ÷ Ì ¿ J ] ¿ [ - @ \ f J Ì Æ ]- ¿ Development of a Beef Fat Evaluation](https://img.pdfslide.net/doc/110x75/61085d703d3d0b11ac44475b/i-010-z-p-y-i-j-c-g-s-x-1-oe-g-u-x-y.jpg)

![0 ò+ ò/ ò · î ì î ì n Y í & ] v v ] o ï ò ò" ò- ò. K ò9797 ò+ K ò ò ò ò + ò ò ò](https://img.pdfslide.net/doc/110x75/5f40ff1754b8c6159c151d06/0-n-y-v-v-o-k-9797.jpg)


