Embed Size (px)
Citation preview

11/00
C O M B I V E R T
00.F
4.C
0B-K
110
D BETRIEBSANLEITUNG Steuerteil
GB INSTRUCTION MANUAL Control circuit
F MANUEL D'INSTRUCTION Carte de commandeI MANUALE DI ISTRUZIONE Circuito di controllo
E MANUAL DE INSTRUCCIONES Circuito de control
Erst Betriebsanleitung Teil lesen!Read Instruction manual part before!Lisez d'abord le manuel d'instructions partie !Prima leggere le manuale di istruzione parte !Leer manual de instrucciones parte antes! !11111STOP
F4-CF4-CF4-CF4-CF4-CF4-CF4-CF4-CF4-CF4-C
F4-SF4-SF4-SF4-SF4-SF4-SF4-SF4-SF4-SF4-S
ANTRIEBSTECHNIK

© KEB 00.F4.C0B-K110
3
ANTRIEBSTECHNIK
D
GB
F
I
E
D Steuerteil Seite 4 ................... 27
GB Control circuit Page 28 ................. 51
F Carte de commande Page 52 ................. 75
I Circuito di controllo Page 76 ................. 99
E Circuito de control Page 100 ............. 123
"#$ 124 ..... 147
Passwords Page 148
RU
100
E
Este manual de instrucciones describe las series estándar del COMBIVERT F4-S (pequeño) y del F4-C (compacto). Este manual de instrucciones debe ser accesible a todos los usuarios. Antes de conectarel convertidor, el usuario debe de familiarizarse con el convertidor, especialmente debe de tener encuenta las medias de seguridad y advertencias. Los pictogramas utilizados en este manual tienen lossignificados siguientes:
PeligroPeligroPeligroPeligroPeligroAdvertenciaAdvertenciaAdvertenciaAdvertenciaAdvertenciaPrecauciónPrecauciónPrecauciónPrecauciónPrecaución
AtenciónAtenciónAtenciónAtenciónAtenciónde obligadode obligadode obligadode obligadode obligadocumplimientocumplimientocumplimientocumplimientocumplimiento
InformaciónInformaciónInformaciónInformaciónInformaciónAyudaAyudaAyudaAyudaAyudaNotaNotaNotaNotaNota
El KEB COMBIVERT funciona con tensiones que pueden sermortales por simple contacto. La instalación de la unidad así comode los accesorios, debe ser sólo efectuada por personal técnicocualificado. Un funcionamiento seguro y libre de problemas sólo esposible cuando se cumplen las normas DIN VDE 0100, DIN VDE0113, DIN VDE 0160, DIN VDE 0875 así como la reglamentaciónlocal.
Después de desconectar la tensión de alimentación al convertidorde frecuencia, aún subsisten, durante un cierto tiempo, tensionesimportantes en los bornes de los condensadores del circuitointermedio. Por esta razón no se permite manipular la unidad hastatranscurridos 5 minutos a partir de la desconexión.
Atención
Solamente personalEléctrico cualificado
Utilizado cuando la vida o la salud del usuario es puesta enpeligro o si una averia importante puede ser ocasionada.
Utilizado cuando sea necesaria una precaución para unbuen funcionamiento.
Utilizado cuando una atención particular debe tenerse encuenta.
Atención al tiempode descarga de los
Peligro
101
ANTRIEBSTECHNIK
E
Indice
Indice1. Instalación y conexionado ...................... 1021.1 Circuito de control - versión C..........................1021.1.1 Descripción del bloque de control X1 ..................1021.1.2 Conexionado del circuito de control ....................1031.1.3 Entradas digitales ................................................1031.1.4 Entradas analógicas ............................................1031.1.5 Salidas ................................................................1031.2 Circuito de control - versión S ..........................1041.2.1 Descripción del bloque de control X1 ..................1041.2.2 Conexionado del circuito de control ....................1041.2.3 Entradas digitales ................................................1041.2.4 Entradas analógicas ............................................1041.2.5 Salidas ................................................................105
2. Instrucciones de utilización .................... 1052.1 Panel digital ........................................................1052.1.1 Panel con interface ..............................................1052.1.2 Teclado ................................................................1062.2 Resumen de parámetros...................................1072.3 Password de entrada ........................................1072.4 Mensajes de funcionamiento............................1082.5 Funciones básicas del convertidor ..................1092.6 Funciones especiales .......................................1112.7 El modo Drive ....................................................1172.7.1 Marcha / Paro del motor .......................................1172.7.2 Inversión del sentido de giro ................................ 1172.7.3 Referencia predefinida ........................................1172.7.4 Salida del modo Drive .........................................117
3. Diagnóstico de errores ............................ 118
4. Glossario ................................................... 119
5. Indice.......................................................... 120
6. Passwords ................................................. 149

102
E
1. Instalación y conexionado
1.1 Circuito de control -versión C
1.1.1 Descripción del bloquede terminales de controlX1
20 22 231 2 3 4 21
16 17 185 6 7 8 9 10 11 12 13 14 15 19
Borna Función Descripción
X1.1 Contacto NA Salida de reléX1.2 Contacto NC Función ver parámetro CP.22X1.3 Contacto común (valor por defecto: indicación de fallo)
X1.4 Frecuencia fija 1 X1.4 + X1.5 = frecuencia fija 3X1.5 Frecuencia fija 2 sin entrada = consigna analógica
X1.6 Frenado DC activación del frenado DC
X1.7 Función ahorro energía La tensión de salida se reduce al 70%
X1.8 + Entrada diferencial La diferencia de tensión es sumada/X1.9 - Entrada diferencial restada de REF (X1.17)
X1.10 Marcha adelante Consigna del sentido de giro; la marchaX1.11 Marcha atrás adelante tiene prioridad
X1.12 Contacto depen. La salida de transistor conmuta si freal = freferenciade la frecuencia
X1.13 Masa Masa para las entradas/salidas digitalesX1.14 15V Tensión de alimentación para las entradas/salidas digitales (max.100mA)
X1.15 Salida analógica Salida analógica de la frecuencia real de salida 0...10VDC = 0...100 Hz
X1.16 +10V Tensión de alimentación para el potenciómetro de consigna (max. 4mA)X1.17 Entrada de consigna Valor por defecto 0...10V (0...20mA y 4...20mA seleccionable por CP.24X1.18 Común Masa de entradas/salidas analógicas
X1.19 Habilitación variador Habilitación del modulo de potencia / Rearme hardware
X1.20 Rearme Rearme hardware; solamente posible en un fallo
X1.21 Contacto NA Salida de relé; conmuta cuando el nivelX1.22 Contacto NC del parámetro CP.23 es alcanzadoX1.23 Contacto común (conmutación dependiente de la frecuencia)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23
103
ANTRIEBSTECHNIK
E
Instalación y conexionado
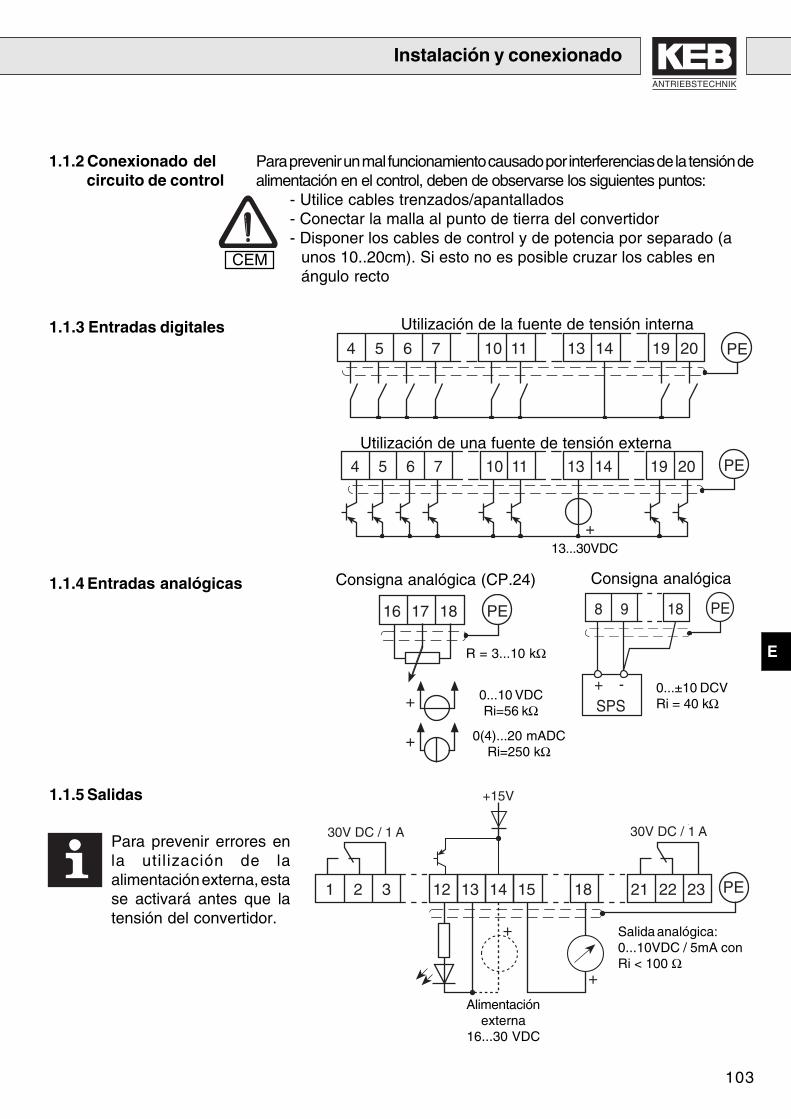
Para prevenir un mal funcionamiento causado por interferencias de la tensión dealimentación en el control, deben de observarse los siguientes puntos:
- Utilice cables trenzados/apantallados- Conectar la malla al punto de tierra del convertidor- Disponer los cables de control y de potencia por separado (a
unos 10..20cm). Si esto no es posible cruzar los cables enángulo recto
1.1.4 Entradas analógicas
Utilización de la fuente de tensión interna
8 9 18
+ -SPS
PE
1.1.5 Salidas
1.1.3 Entradas digitales
Consigna analógica (CP.24)
4 5 6 7 10 11 13 14 19 20 PE
0...±10 DCVRi = 40 kΩ
16 17 18 PE
+
+
4 5 6 7 10 11 13 14 19 20
+
PE
13...30VDC
1.1.2 Conexionado delcircuito de control
Para prevenir errores enla utilización de laalimentación externa, estase activará antes que latensión del convertidor.
CEM
Utilización de una fuente de tensión externa
Consigna analógica
0(4)...20 mADCRi=250 kΩ
0...10 VDCRi=56 kΩ
R = 3...10 kΩ
1 2 3 12 21 22 231413
+15V
15 18
+
PE
+
250V AC / 0,2 mA30V DC / 1 A
250V AC / 0,2 mA30V DC / 1 A
Alimentaciónexterna
16...30 VDC
Salida analógica:0...10VDC / 5mA conRi < 100 Ω
104
E
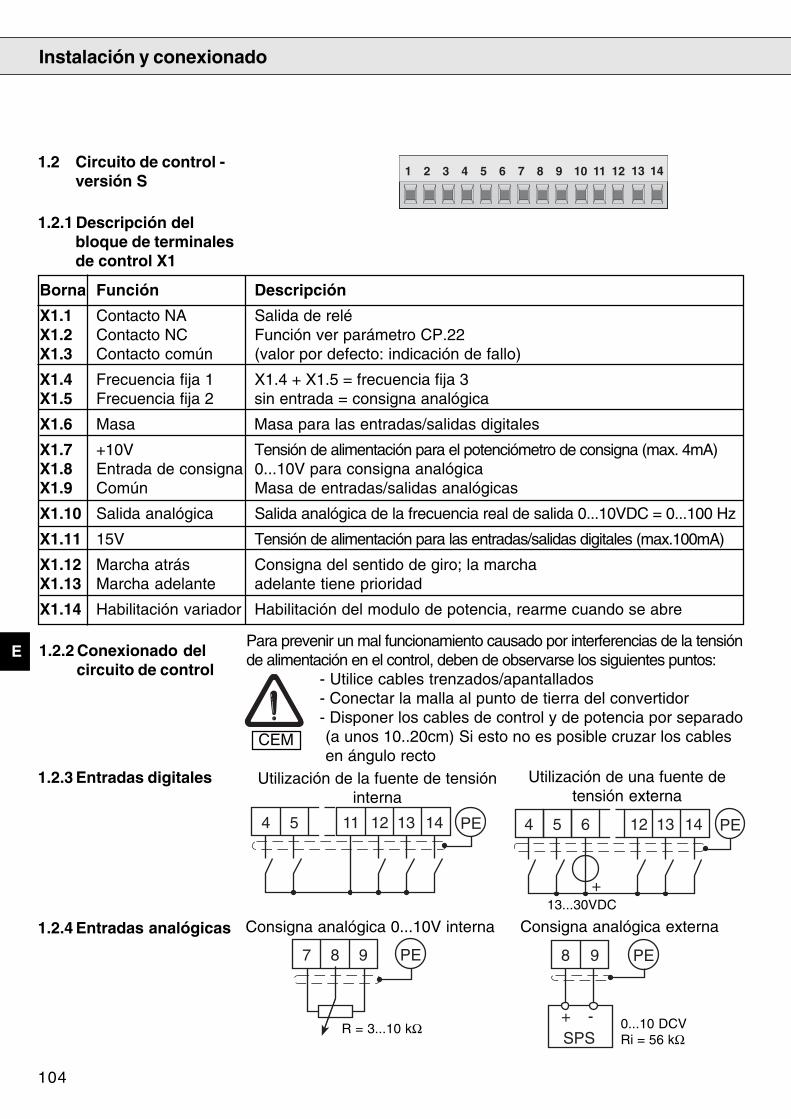
1 2 3 4 5 6 7 8 9 10 11 12 13 141.2 Circuito de control -
versión S
1.2.1 Descripción delbloque de terminalesde control X1
1.2.2 Conexionado delcircuito de control
Utilización de una fuente detensión externa
Utilización de la fuente de tensióninterna
Instalación y conexionado
1.2.3 Entradas digitales
7 8 9 PE 8 9
+ -SPS
PE
0...10 DCVRi = 56 kΩ
R = 3...10 kΩ
1.2.4 Entradas analógicas
Borna Función Descripción
X1.1 Contacto NA Salida de reléX1.2 Contacto NC Función ver parámetro CP.22X1.3 Contacto común (valor por defecto: indicación de fallo)
X1.4 Frecuencia fija 1 X1.4 + X1.5 = frecuencia fija 3X1.5 Frecuencia fija 2 sin entrada = consigna analógica
X1.6 Masa Masa para las entradas/salidas digitales
X1.7 +10V Tensión de alimentación para el potenciómetro de consigna (max. 4mA)X1.8 Entrada de consigna 0...10V para consigna analógicaX1.9 Común Masa de entradas/salidas analógicas
X1.10 Salida analógica Salida analógica de la frecuencia real de salida 0...10VDC = 0...100 Hz
X1.11 15V Tensión de alimentación para las entradas/salidas digitales (max.100mA)
X1.12 Marcha atrás Consigna del sentido de giro; la marchaX1.13 Marcha adelante adelante tiene prioridad
X1.14 Habilitación variador Habilitación del modulo de potencia, rearme cuando se abre
Para prevenir un mal funcionamiento causado por interferencias de la tensiónde alimentación en el control, deben de observarse los siguientes puntos:
- Utilice cables trenzados/apantallados- Conectar la malla al punto de tierra del convertidor- Disponer los cables de control y de potencia por separado(a unos 10..20cm) Si esto no es posible cruzar los cablesen ángulo recto
CEM
4 6 12 13 14 PE
+
5
13...30VDC
4 5 11 12 13 14 PE
Consigna analógica 0...10V interna Consigna analógica externa
105
ANTRIEBSTECHNIK
E
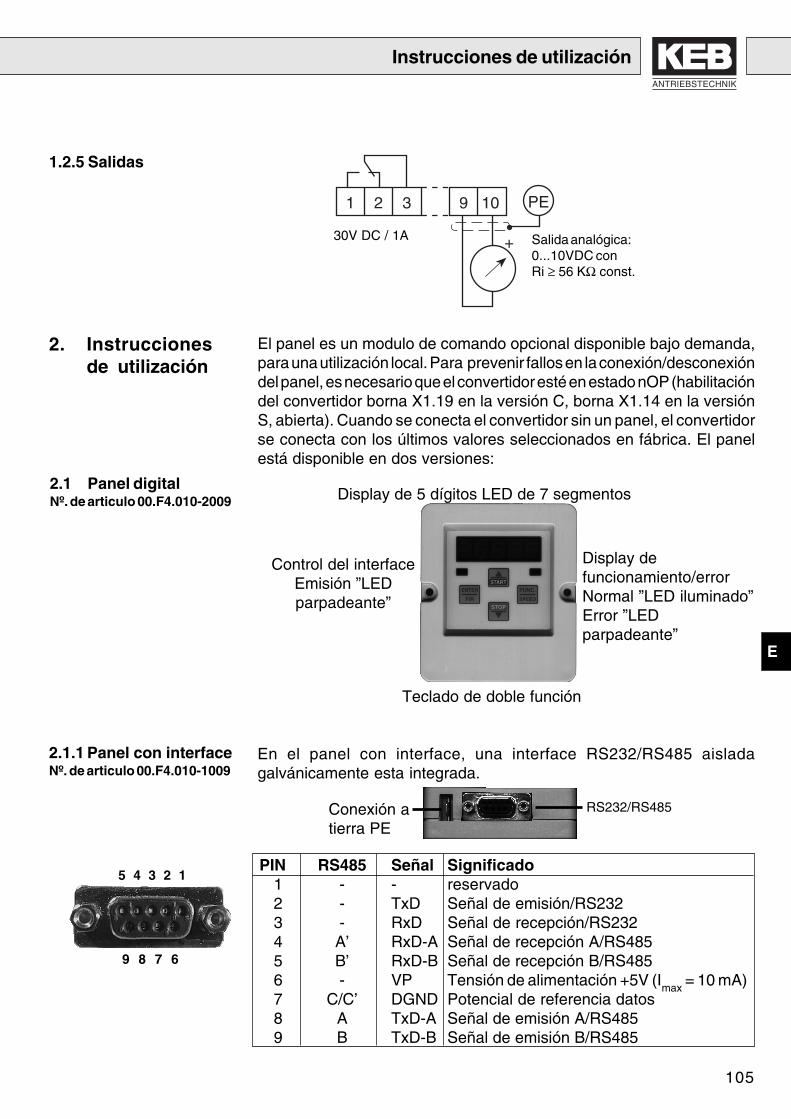
1 2 3 9 10
+
PE
Salida analógica:0...10VDC conRi ≥ 56 KΩ const.
1.2.5 Salidas
2.1 Panel digitalNº. de articulo 00.F4.010-2009
9 8 7 6
5 4 3 2 1
2.1.1 Panel con interfaceNº. de articulo 00.F4.010-1009
En el panel con interface, una interface RS232/RS485 aisladagalvánicamente esta integrada.
Conexión atierra PE
RS232/RS485
Display defuncionamiento/errorNormal ”LED iluminado”Error ”LEDparpadeante”
Instrucciones de utilización
Control del interfaceEmisión ”LEDparpadeante”
El panel es un modulo de comando opcional disponible bajo demanda,para una utilización local. Para prevenir fallos en la conexión/desconexióndel panel, es necesario que el convertidor esté en estado nOP (habilitacióndel convertidor borna X1.19 en la versión C, borna X1.14 en la versiónS, abierta). Cuando se conecta el convertidor sin un panel, el convertidorse conecta con los últimos valores seleccionados en fábrica. El panelestá disponible en dos versiones:
2. Instruccionesde utilización
Display de 5 dígitos LED de 7 segmentos
Teclado de doble función
PIN RS485 Señal Significado1 - - reservado2 - TxD Señal de emisión/RS2323 - RxD Señal de recepción/RS2324 A’ RxD-A Señal de recepción A/RS4855 B’ RxD-B Señal de recepción B/RS4856 - VP Tensión de alimentación +5V (Imax = 10 mA)7 C/C’ DGND Potencial de referencia datos8 A TxD-A Señal de emisión A/RS4859 B TxD-B Señal de emisión B/RS485
30V DC / 1A
106
E
Instrucciones de utilización
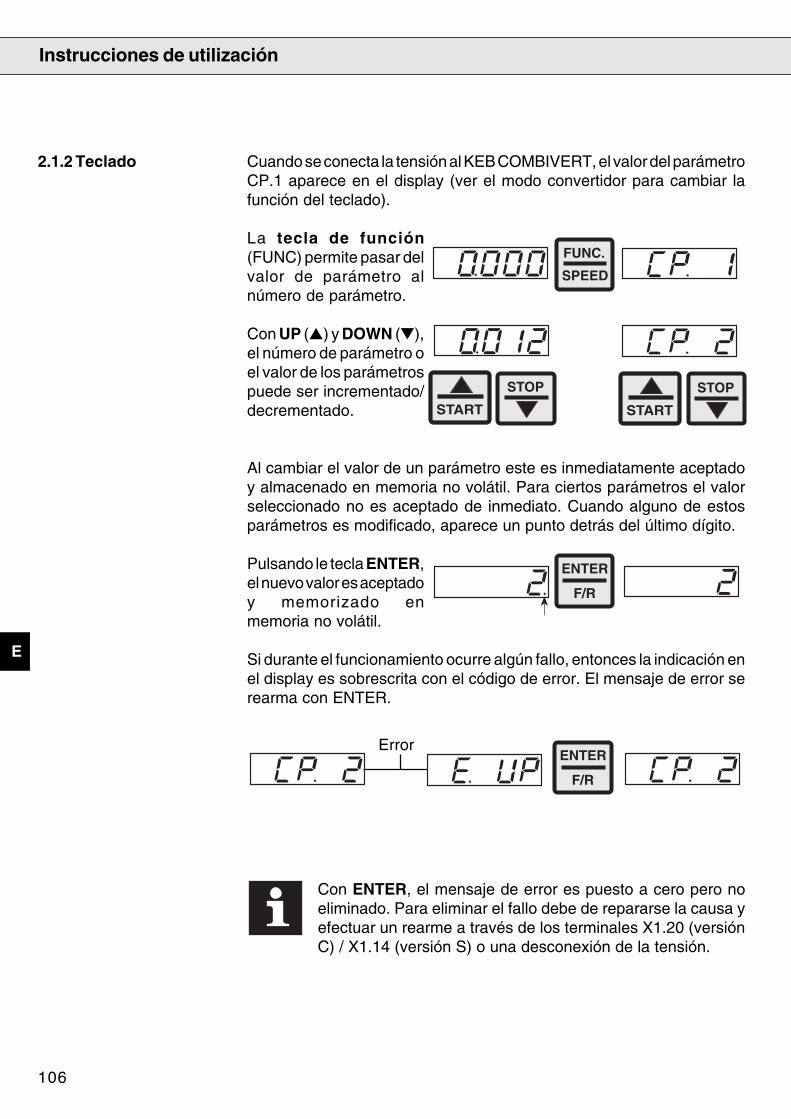
Cuando se conecta la tensión al KEB COMBIVERT, el valor del parámetroCP.1 aparece en el display (ver el modo convertidor para cambiar lafunción del teclado).
La tecla de función(FUNC) permite pasar delvalor de parámetro alnúmero de parámetro.
Con UP () y DOWN (),el número de parámetro oel valor de los parámetrospuede ser incrementado/decrementado.
Al cambiar el valor de un parámetro este es inmediatamente aceptadoy almacenado en memoria no volátil. Para ciertos parámetros el valorseleccionado no es aceptado de inmediato. Cuando alguno de estosparámetros es modificado, aparece un punto detrás del último dígito.
Pulsando le tecla ENTER,el nuevo valor es aceptadoy memorizado enmemoria no volátil.
Si durante el funcionamiento ocurre algún fallo, entonces la indicación enel display es sobrescrita con el código de error. El mensaje de error serearma con ENTER.
Con ENTER, el mensaje de error es puesto a cero pero noeliminado. Para eliminar el fallo debe de repararse la causa yefectuar un rearme a través de los terminales X1.20 (versiónC) / X1.14 (versión S) o una desconexión de la tensión.
2.1.2 Teclado
Error
ENTER
F/R
FUNC.
SPEED
START
STOP
START
STOP
ENTER
F/R
107
ANTRIEBSTECHNIK
E
Instrucciones de utilización
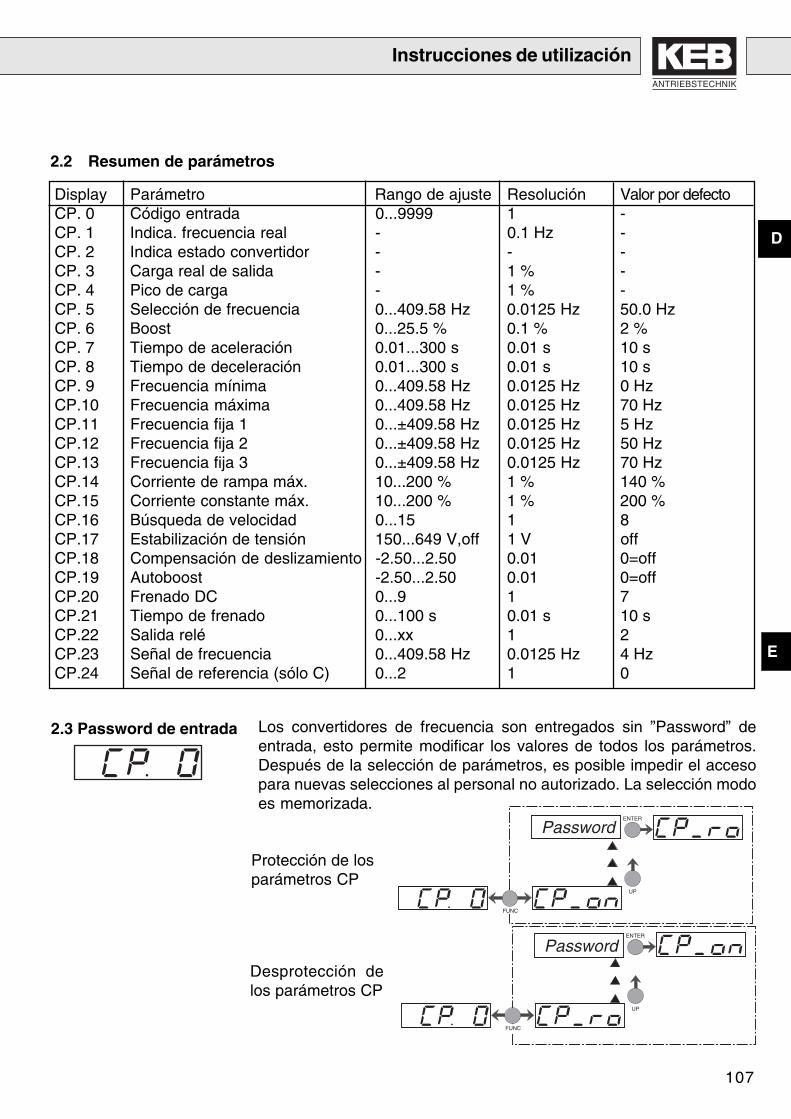
2.2 Resumen de parámetros
D
Display Parámetro Rango de ajuste Resolución Valor por defectoCP. 0 Código entrada 0...9999 1 -CP. 1 Indica. frecuencia real - 0.1 Hz -CP. 2 Indica estado convertidor - - -CP. 3 Carga real de salida - 1 % -CP. 4 Pico de carga - 1 % -CP. 5 Selección de frecuencia 0...409.58 Hz 0.0125 Hz 50.0 HzCP. 6 Boost 0...25.5 % 0.1 % 2 %CP. 7 Tiempo de aceleración 0.01...300 s 0.01 s 10 sCP. 8 Tiempo de deceleración 0.01...300 s 0.01 s 10 sCP. 9 Frecuencia mínima 0...409.58 Hz 0.0125 Hz 0 HzCP.10 Frecuencia máxima 0...409.58 Hz 0.0125 Hz 70 HzCP.11 Frecuencia fija 1 0...±409.58 Hz 0.0125 Hz 5 HzCP.12 Frecuencia fija 2 0...±409.58 Hz 0.0125 Hz 50 HzCP.13 Frecuencia fija 3 0...±409.58 Hz 0.0125 Hz 70 HzCP.14 Corriente de rampa máx. 10...200 % 1 % 140 %CP.15 Corriente constante máx. 10...200 % 1 % 200 %CP.16 Búsqueda de velocidad 0...15 1 8CP.17 Estabilización de tensión 150...649 V,off 1 V offCP.18 Compensación de deslizamiento -2.50...2.50 0.01 0=offCP.19 Autoboost -2.50...2.50 0.01 0=offCP.20 Frenado DC 0...9 1 7CP.21 Tiempo de frenado 0...100 s 0.01 s 10 sCP.22 Salida relé 0...xx 1 2CP.23 Señal de frecuencia 0...409.58 Hz 0.0125 Hz 4 HzCP.24 Señal de referencia (sólo C) 0...2 1 0
Password
FUNC
ENTER
UP
2.3 Password de entrada Los convertidores de frecuencia son entregados sin ”Password” deentrada, esto permite modificar los valores de todos los parámetros.Después de la selección de parámetros, es posible impedir el accesopara nuevas selecciones al personal no autorizado. La selección modoes memorizada.
FUNC
ENTER
UP
Password
Protección de losparámetros CP
Desprotección delos parámetros CP
108
E
Instrucciones de utilización
Los 4 parámetros siguientes sirven para controlar el convertidor defrecuencia durante el funcionamiento.
Visualización de la frecuencia de salida con una resolución de 0.0125 Hz.El sentido de giro se indica por el signo. Ejemplos:
Frecuencia de salida 18.3 Hz, sentido de giro adelante
Frecuencia de salida 18.3 Hz, sentido de giro atrás
El display de estado indica las condiciones de trabajo del convertidor.Los mensajes y su significado son:
”no Operation”: la borna que permite la habilitación delconvertidor ( X1.19) no esta cerrada, la modulación estainactiva, la tensión de salida = 0 V, el motor no está controlado.
”Low Speed”: sentido de giro no seleccionado (terminal X1.10o X1.11) no seleccionado , la modulación esta inactiva, latensión de salida = 0 V, el motor no está controlado.
”Forward Acceleration”: el motor acelera hacia adelante.
”Forward Deceleration”: el motor decelera hacia adelante.
”Reverse Acceleration”: el motor acelera hacia atrás.
”Reverse Deceleration”: el motor decelera hacia atrás.
”Forward Constant”: el motor gira hacia adelante con unavelocidad constante.
”Reverse Constant”: el motor gira hacia atrás con unavelocidad constante.
Otros mensajes de estado están definidos en la descripción de parámetros.Los mensajes de error y sus causas están descritas en el capítulo 5.
Indica la carga real de salida del convertidor en tantos por cien. 100% decarga corresponde a la corriente nominal del variador. Solo se indicanvalores positivos, entendiendo que no se diferencia entre unfuncionamiento motor normal y regenerativo.
Permite la visualización de picos de corriente, memorizando los valoresmás altos. El valor indicado es en tantos por cien (100% = corrientenominal del convertidor).
Con las teclas UP/DOWN, el valor pico puede ser rearmado acero si la unidad está bajo tensión. Esto permite la medida de losvalores pico en distintas fases del proceso. La desconexión delconvertidor borra el valor pico.
2.4 Mensajes defuncionamiento
Visualización del estado
Frecuencia actual
Carga actual de salida
Pico de carga
109
ANTRIEBSTECHNIK
E
Instrucciones de utilización
2.5 Funciones básicasdel convertidor
Boost En baja velocidad de rotación, una gran parte de tensión de alimentacióndel motor se pierde en la resistencia del estator. Para mantener constanteel par motor en todo el rango de velocidades, la caida de tensión puedeser compensada con el boost.
Rango de ajuste: 0 ...25,5 %Resolución: 0,1 %Ajuste de fábrica: 2 %Ajuste del cliente: _______ %
Ajuste: - Determinar el consumo de corriente sin carga a frecuencia nominal- Establecer una consigna de 10 Hz y ajustar el boost para obtener la misma corriente que a la frecuencia nominal.
Si el motor gira continuamente a baja velocidad con tensionesde alimentación elevadas, puede producirse unsobrecalentamiento de este.
Este parámetro determina el tiempo necesario para acelerar de 0 a 100Hz. El tiempo de aceleración es directamente proporcional a la diferenciade frecuencia.
delta f x CP. 7= Tiempo de aceleración real100 Hz
Rango de ajuste: 0,01 ...300 sResolución: 0,01 sAjuste de fábrica: 10 sAjuste del cliente: _______ s
Ejemplo: CP. 7 = 10 s; El motor debe de acelerar de 10 a 60 Hzdelta f = 60 Hz - 10 Hz = 50 Hz
Tiempo de aceleración real = (50 Hz / 100 Hz) x 10s = 5 s
Los parámetros siguientes determinan los datos fundamentales deoperación. Estos deben en todos los casos ser comprobados y/oadaptados a la aplicación.
La frecuencia seleccionada en este parámetro corresponde a la cual, latensión de salida del convertidor será máxima. El valor típico de seleccióncorresponde al de la frecuencia nominal del motor. Nota: A frecuencias< 50 Hz y tensión máxima los motores pueden sufrir sobrecalentamientos.
!
Rango de ajuste: 0 ...409,58 HzResolución: 0,0125 HzAjuste de fábrica: 50 HzAjuste del cliente: _______ Hz
100%
Frecuencia nominal
UA
fCP. 5
UA
fCP. 5
CP. 6
f
t
100 Hz
CP. 7
Tiempo de aceleración
110
E
Instrucciones de utilización
Tiempo de deceleración
Frecuencia máxima
Este parámetro determina el tiempo necesario para decelerar de 0 a 100 Hz. Eltiempo de deceleración es directamente proporcional a la diferencia de frecuencia.
delta f x CP. 8 = Tiempo de aceleración real100 Hz
Rango de ajuste: 0,01 ...300 sResolución: 0,01 sAjuste de fábrica: 10 sAjuste del cliente: _______ s
Ejemplo: CP. 8 = 10 s ; el motor debe decelerar de 60 Hz a 10 Hzdelta f = 60 Hz - 10 Hz = 50 Hz
Tiempo de deceleración real = (50 Hz / 100 Hz) x 10s = 5 s
Frecuencia a la que gira el motor sin consigna analógica. Límite internode las consignas digitales de frecuencia CP.11...CP.13
Rango de ajuste: 0 ...409,58 HzResolución: 0,0125 HzAjuste de fábrica: 0 HzAjuste del cliente: _______ Hz
Frecuencia a la que gira el motor con una consigna analógica máxima.Límite interno de las consignas digitales de frecuencia CP.11...CP.13
Rango de ajuste: 0 ...409,58 HzResolución: 0,0125 HzAjuste de fábrica: 70 HzAjuste del cliente: _______ Hz
3 consignas de frecuencia fijas pueden ser seleccionadas. La selección delas consignas de frecuencia digitales tiene efecto por los terminales I1 y I2(bornas X1.4 y X1.5)
Rango de ajuste: 0 ...±409,58 HzResolución: 0,0125 HzAjuste de fábrica: 5/50/70 HzAjuste del cliente 1: _______ HzAjuste del cliente 2: _______ HzAjuste del cliente 3: _______ Hz
Si una consigna de frecuencia se selecciona fuera de los límites deCP.9 y CP.10, entonces la frecuencia se limita internamente.
f
t
100 Hz
CP. 8
f
UREFCP. 9
CP.10
10 V0 V
Frecuencia mínima
Frecuencias de consignadigitales 1...3
borna X1.4
bornas X1.4 y X1.5
borna X1.5
111
ANTRIEBSTECHNIK
E
Instrucciones de utilización
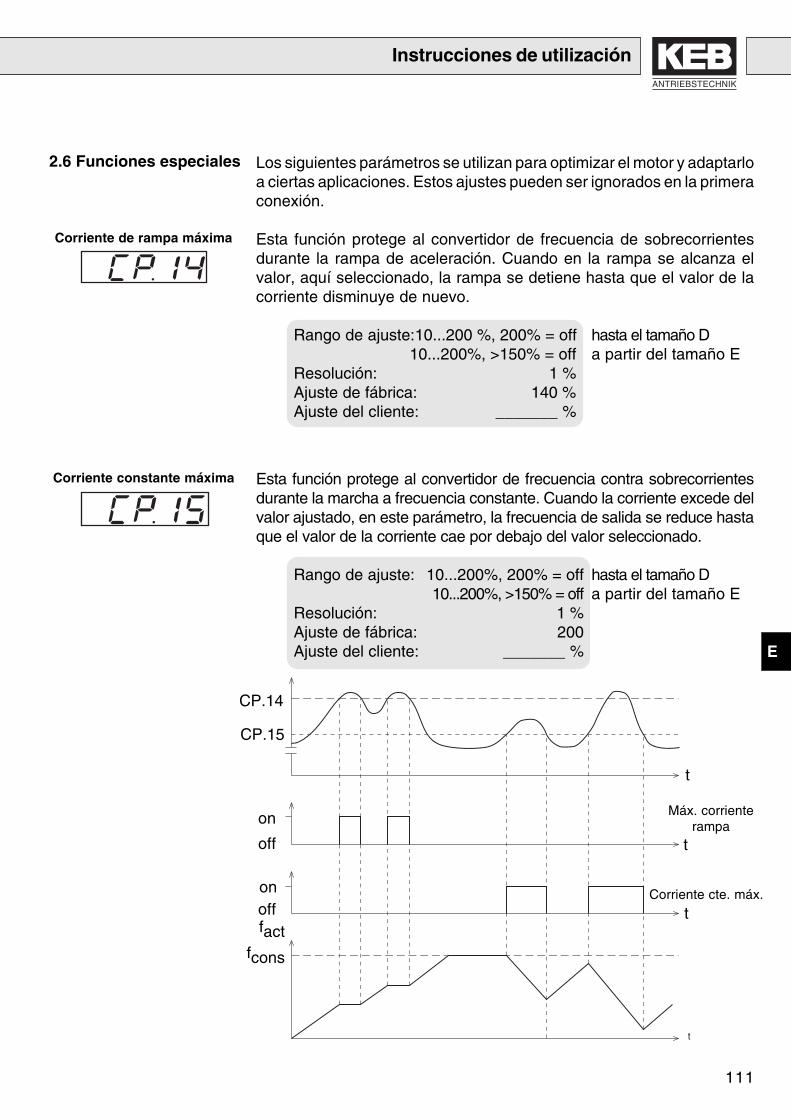
2.6 Funciones especiales Los siguientes parámetros se utilizan para optimizar el motor y adaptarloa ciertas aplicaciones. Estos ajustes pueden ser ignorados en la primeraconexión.
Esta función protege al convertidor de frecuencia de sobrecorrientesdurante la rampa de aceleración. Cuando en la rampa se alcanza elvalor, aquí seleccionado, la rampa se detiene hasta que el valor de lacorriente disminuye de nuevo.
Rango de ajuste:10...200 %, 200% = off hasta el tamaño D10...200%, >150% = off a partir del tamaño E
Resolución: 1 %Ajuste de fábrica: 140 %Ajuste del cliente: _______ %
Esta función protege al convertidor de frecuencia contra sobrecorrientesdurante la marcha a frecuencia constante. Cuando la corriente excede delvalor ajustado, en este parámetro, la frecuencia de salida se reduce hastaque el valor de la corriente cae por debajo del valor seleccionado.
Rango de ajuste: 10...200%, 200% = off hasta el tamaño D10...200%, >150% = off a partir del tamaño E
Resolución: 1 %Ajuste de fábrica: 200Ajuste del cliente: _______ %
Corriente de rampa máxima
Corriente constante máxima
CP.14
CP.15
on
off
onofffact
fcons
t
t
t
t
Máx. corrienterampa
Corriente cte. máx.
112
E
Instrucciones de utilización
Búsqueda de velocidad Cuando se conecta un convertidor de frecuencia a un motor quedecelera por su inercia, puede producirse un fallo causado por ladiferencia de las frecuencias de excitación. Activando la función debúsqueda de velocidad el convertidor busca la velocidad real del motor,adaptando su frecuencia de salida y acelera con la rampa seleccionadahasta la velocidad de consigna. Este parámetro determina la condiciónpor la que la función se activa. Con varias condiciones debe ser entradala suma de los valores. Ejemplo: CP.16 = 12 significa después delrearme y después de Auto-rearme UP.
Rango de ajuste: 0...15 Valor CondiciónResolución: 1 oFF función offAjuste de fábrica: 8 1 al habilitar el controlAjuste del cliente: _______ 2 al conectar la alimentación
4 después de un rearme8 después de un auto-rearme UP
Estabilización de la tensiónde salida
Este parámetro permite regular la tensión de salida en función de lafrecuencia nominal. Las variaciones en la tensión de alimentación alconvertidor así como al circuito intermedio sólo tienen una pequeñaincidencia en la tensión de salida (característica U/f). Esta funciónpermite, entre otras cosas, la adaptación de la tensión de salida para losmotores especiales. En el ejemplo siguiente, la tensión de salida esestabilizada a 230 V (0% boost).
Rango de ajuste: 150...649 V, oFFResolución: 1 VAjuste de fábrica: oFFAjuste del cliente: _______ V
250 V
CP.17 = 230 V
190 V
CP.5 = 50 Hzf
UN/UA
UA a UN = 250V no estabilizada
UA a UN = 250V estabilizada
UA a UN = 190V estabilizada
UA a UN = 190V no estabilizada
UN = tensión de líneaUA= tensión de salida
113
ANTRIEBSTECHNIK
E
Instrucciones de utilización
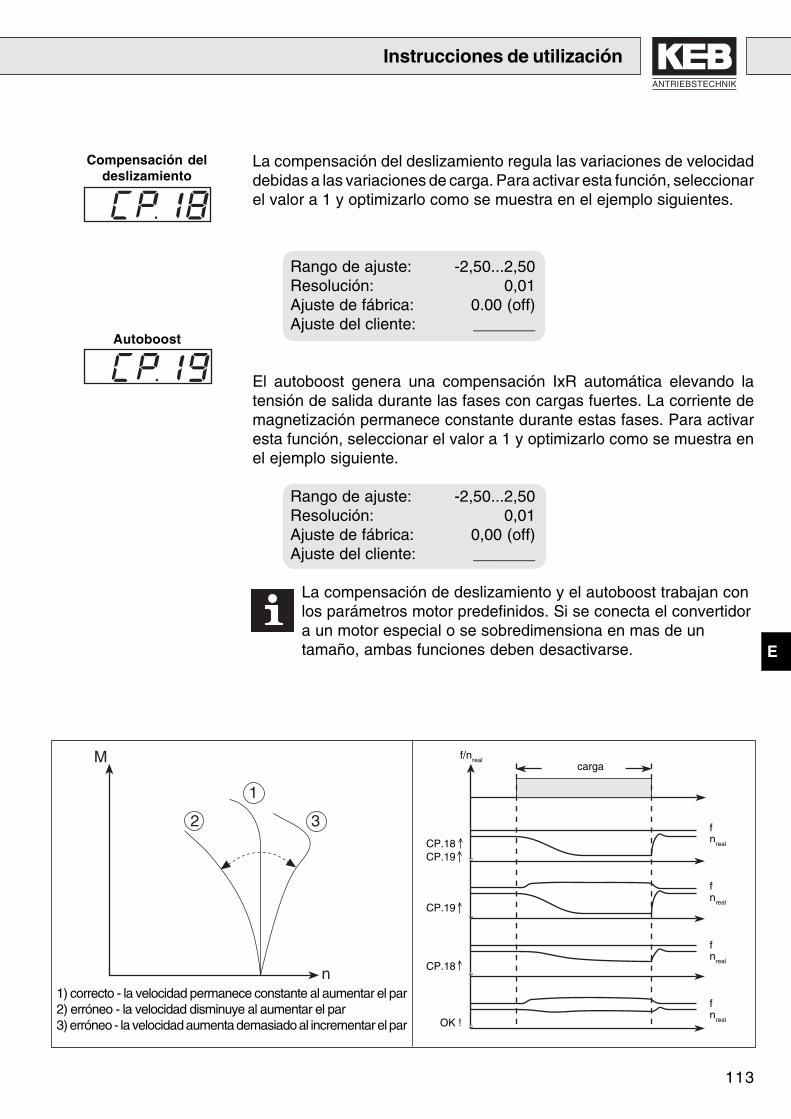
f/nreal
CP.18CP.19
CP.18
CP.19
OK ! =
=
=
=
cargaM
n
1
2 3nreal
f
nreal
f
nreal
f
nreal
f1) correcto - la velocidad permanece constante al aumentar el par2) erróneo - la velocidad disminuye al aumentar el par3) erróneo - la velocidad aumenta demasiado al incrementar el par
La compensación del deslizamiento regula las variaciones de velocidaddebidas a las variaciones de carga. Para activar esta función, seleccionarel valor a 1 y optimizarlo como se muestra en el ejemplo siguientes.
Rango de ajuste: -2,50...2,50Resolución: 0,01Ajuste de fábrica: 0.00 (off)Ajuste del cliente: _______
El autoboost genera una compensación IxR automática elevando latensión de salida durante las fases con cargas fuertes. La corriente demagnetización permanece constante durante estas fases. Para activaresta función, seleccionar el valor a 1 y optimizarlo como se muestra enel ejemplo siguiente.
Rango de ajuste: -2,50...2,50Resolución: 0,01Ajuste de fábrica: 0,00 (off)Ajuste del cliente: _______
La compensación de deslizamiento y el autoboost trabajan conlos parámetros motor predefinidos. Si se conecta el convertidora un motor especial o se sobredimensiona en mas de untamaño, ambas funciones deben desactivarse.
Autoboost
Compensación deldeslizamiento
114
E
Instrucciones de utilización
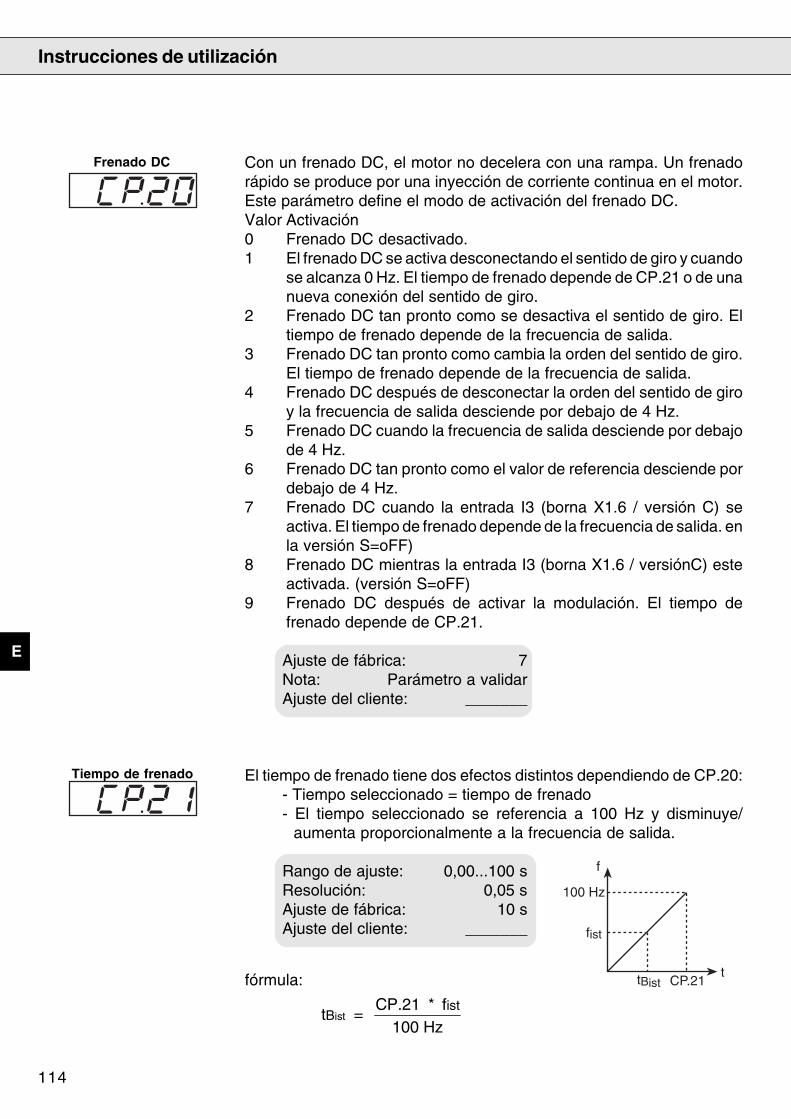
Frenado DC Con un frenado DC, el motor no decelera con una rampa. Un frenadorápido se produce por una inyección de corriente continua en el motor.Este parámetro define el modo de activación del frenado DC.Valor Activación0 Frenado DC desactivado.1 El frenado DC se activa desconectando el sentido de giro y cuando
se alcanza 0 Hz. El tiempo de frenado depende de CP.21 o de unanueva conexión del sentido de giro.
2 Frenado DC tan pronto como se desactiva el sentido de giro. Eltiempo de frenado depende de la frecuencia de salida.
3 Frenado DC tan pronto como cambia la orden del sentido de giro.El tiempo de frenado depende de la frecuencia de salida.
4 Frenado DC después de desconectar la orden del sentido de giroy la frecuencia de salida desciende por debajo de 4 Hz.
5 Frenado DC cuando la frecuencia de salida desciende por debajode 4 Hz.
6 Frenado DC tan pronto como el valor de referencia desciende pordebajo de 4 Hz.
7 Frenado DC cuando la entrada I3 (borna X1.6 / versión C) seactiva. El tiempo de frenado depende de la frecuencia de salida. enla versión S=oFF)
8 Frenado DC mientras la entrada I3 (borna X1.6 / versiónC) esteactivada. (versión S=oFF)
9 Frenado DC después de activar la modulación. El tiempo defrenado depende de CP.21.
Ajuste de fábrica: 7Nota: Parámetro a validarAjuste del cliente: _______
El tiempo de frenado tiene dos efectos distintos dependiendo de CP.20:- Tiempo seleccionado = tiempo de frenado- El tiempo seleccionado se referencia a 100 Hz y disminuye/
aumenta proporcionalmente a la frecuencia de salida.
Rango de ajuste: 0,00...100 sResolución: 0,05 sAjuste de fábrica: 10 sAjuste del cliente: _______
fórmula:
t = CP.21 * f
100 HzB
istist
Tiempo de frenado
f
t
fist
CP.21
100 Hz
tBist
115
ANTRIEBSTECHNIK
E
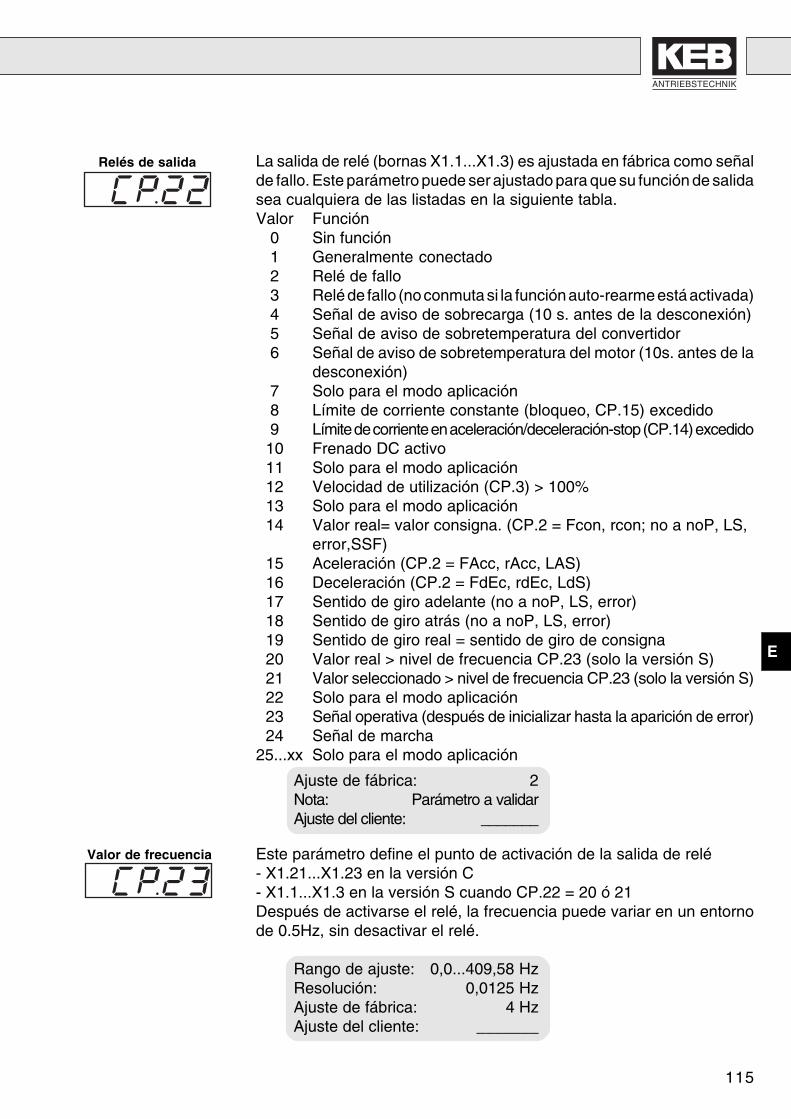
Relés de salida La salida de relé (bornas X1.1...X1.3) es ajustada en fábrica como señalde fallo. Este parámetro puede ser ajustado para que su función de salidasea cualquiera de las listadas en la siguiente tabla.Valor Función
0 Sin función1 Generalmente conectado2 Relé de fallo3 Relé de fallo (no conmuta si la función auto-rearme está activada)4 Señal de aviso de sobrecarga (10 s. antes de la desconexión)5 Señal de aviso de sobretemperatura del convertidor6 Señal de aviso de sobretemperatura del motor (10s. antes de la
desconexión)7 Solo para el modo aplicación8 Límite de corriente constante (bloqueo, CP.15) excedido9 Límite de corriente en aceleración/deceleración-stop (CP.14) excedido
10 Frenado DC activo11 Solo para el modo aplicación12 Velocidad de utilización (CP.3) > 100%13 Solo para el modo aplicación14 Valor real= valor consigna. (CP.2 = Fcon, rcon; no a noP, LS,
error,SSF)15 Aceleración (CP.2 = FAcc, rAcc, LAS)16 Deceleración (CP.2 = FdEc, rdEc, LdS)17 Sentido de giro adelante (no a noP, LS, error)18 Sentido de giro atrás (no a noP, LS, error)19 Sentido de giro real = sentido de giro de consigna20 Valor real > nivel de frecuencia CP.23 (solo la versión S)21 Valor seleccionado > nivel de frecuencia CP.23 (solo la versión S)22 Solo para el modo aplicación23 Señal operativa (después de inicializar hasta la aparición de error)24 Señal de marcha
25...xx Solo para el modo aplicación
Ajuste de fábrica: 2Nota: Parámetro a validarAjuste del cliente: _______
Este parámetro define el punto de activación de la salida de relé- X1.21...X1.23 en la versión C- X1.1...X1.3 en la versión S cuando CP.22 = 20 ó 21Después de activarse el relé, la frecuencia puede variar en un entornode 0.5Hz, sin desactivar el relé.
Rango de ajuste: 0,0...409,58 HzResolución: 0,0125 HzAjuste de fábrica: 4 HzAjuste del cliente: _______
Valor de frecuencia
116
E
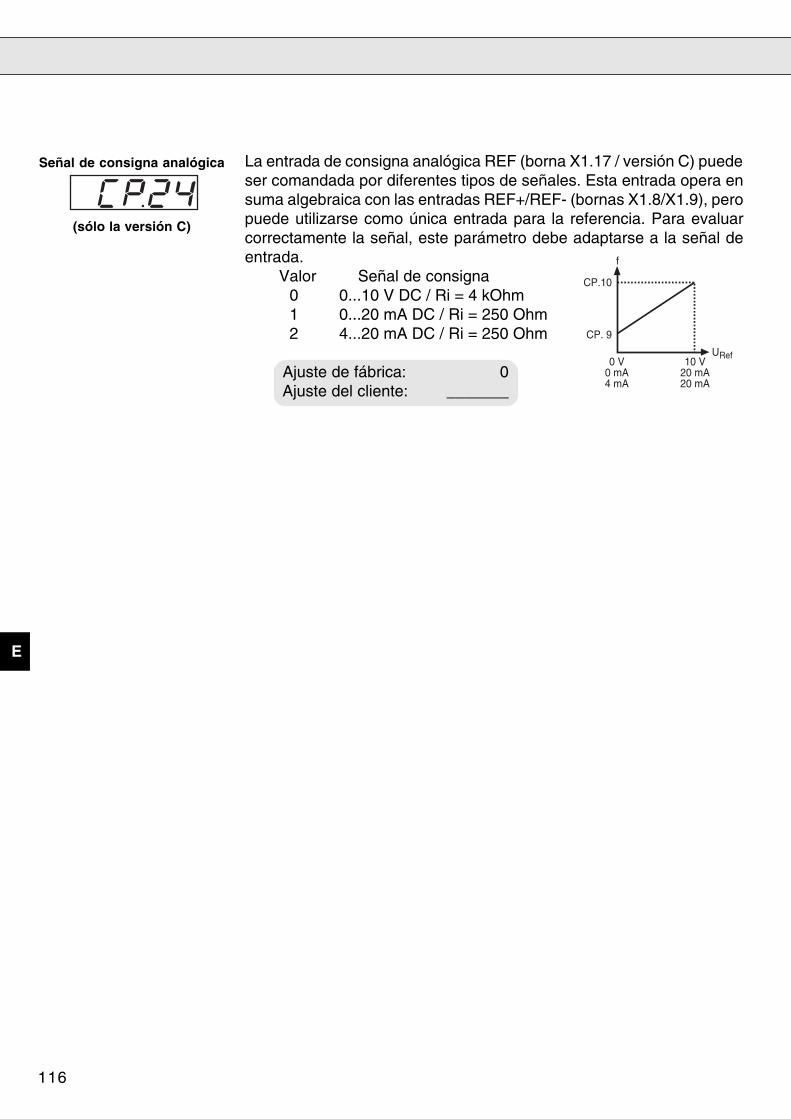
La entrada de consigna analógica REF (borna X1.17 / versión C) puedeser comandada por diferentes tipos de señales. Esta entrada opera ensuma algebraica con las entradas REF+/REF- (bornas X1.8/X1.9), peropuede utilizarse como única entrada para la referencia. Para evaluarcorrectamente la señal, este parámetro debe adaptarse a la señal deentrada.
Valor Señal de consigna0 0...10 V DC / Ri = 4 kOhm1 0...20 mA DC / Ri = 250 Ohm2 4...20 mA DC / Ri = 250 Ohm
Ajuste de fábrica: 0Ajuste del cliente: _______
Señal de consigna analógica
(sólo la versión C)
CP.10
CP. 9
URef
f
0 V0 mA4 mA
10 V20 mA20 mA
117
ANTRIEBSTECHNIK
E
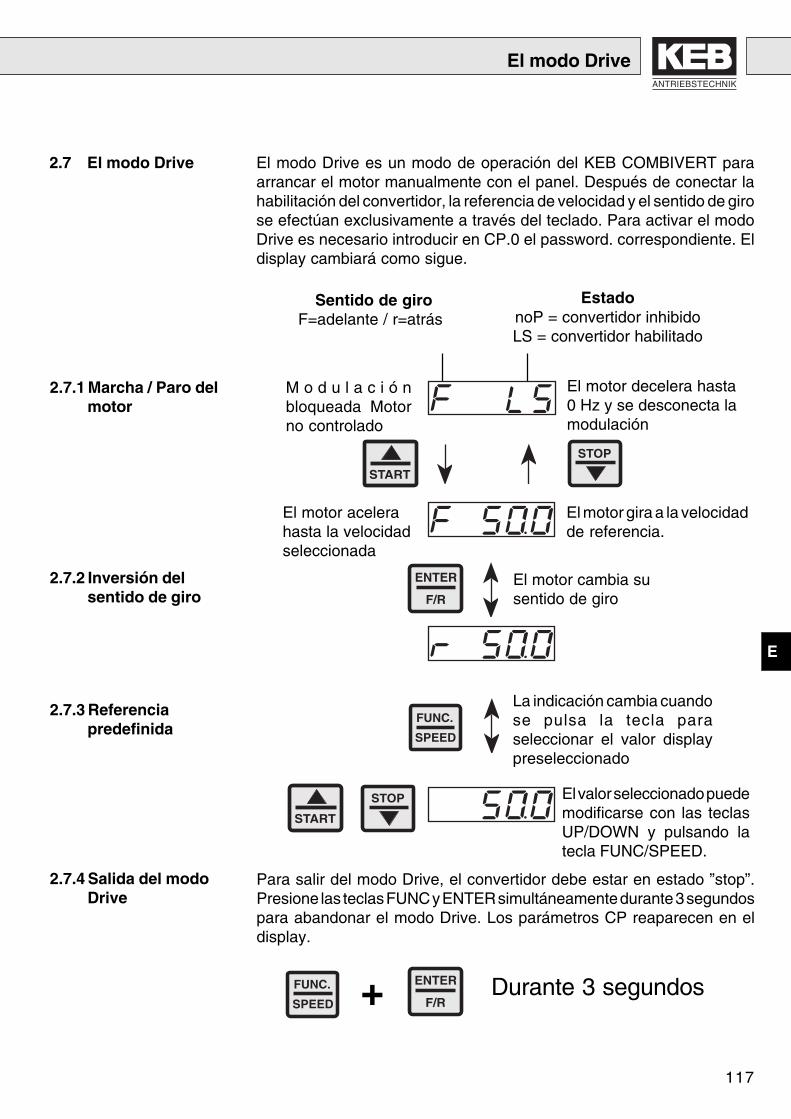
2.7 El modo Drive El modo Drive es un modo de operación del KEB COMBIVERT paraarrancar el motor manualmente con el panel. Después de conectar lahabilitación del convertidor, la referencia de velocidad y el sentido de girose efectúan exclusivamente a través del teclado. Para activar el modoDrive es necesario introducir en CP.0 el password. correspondiente. Eldisplay cambiará como sigue.
El modo Drive
FUNC.
SPEED + ENTER
F/RDurante 3 segundos
Para salir del modo Drive, el convertidor debe estar en estado ”stop”.Presione las teclas FUNC y ENTER simultáneamente durante 3 segundospara abandonar el modo Drive. Los parámetros CP reaparecen en eldisplay.
2.7.4 Salida del modoDrive
El valor seleccionado puedemodificarse con las teclasUP/DOWN y pulsando latecla FUNC/SPEED.
FUNC.
SPEED
La indicación cambia cuandose pulsa la tecla paraseleccionar el valor displaypreseleccionado
El motor cambia susentido de giro
ENTER
F/R
START
STOP
El motor gira a la velocidadde referencia.
STOP
START
El motor acelerahasta la velocidadseleccionada
El motor decelera hasta0 Hz y se desconecta lamodulación
M o d u l a c i ó nbloqueada Motorno controlado
Sentido de giroF=adelante / r=atrás
EstadonoP = convertidor inhibidoLS = convertidor habilitado
2.7.1 Marcha / Paro delmotor
2.7.2 Inversión delsentido de giro
2.7.3 Referenciapredefinida
118
E
Diagnóstico de errores
Sub-tensión
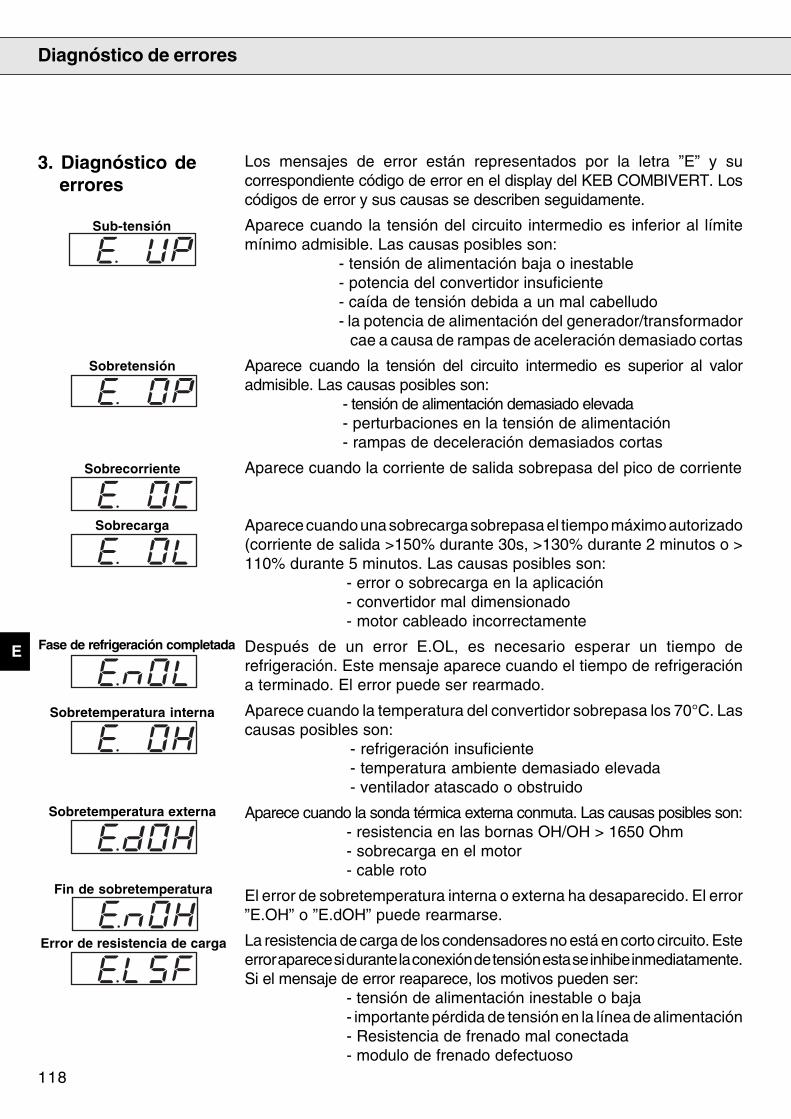
Los mensajes de error están representados por la letra ”E” y sucorrespondiente código de error en el display del KEB COMBIVERT. Loscódigos de error y sus causas se describen seguidamente.
Aparece cuando la tensión del circuito intermedio es inferior al límitemínimo admisible. Las causas posibles son:
- tensión de alimentación baja o inestable- potencia del convertidor insuficiente- caída de tensión debida a un mal cabelludo- la potencia de alimentación del generador/transformador
cae a causa de rampas de aceleración demasiado cortas
Aparece cuando la tensión del circuito intermedio es superior al valoradmisible. Las causas posibles son:
- tensión de alimentación demasiado elevada- perturbaciones en la tensión de alimentación- rampas de deceleración demasiados cortas
Aparece cuando la corriente de salida sobrepasa del pico de corriente
Aparece cuando una sobrecarga sobrepasa el tiempo máximo autorizado(corriente de salida >150% durante 30s, >130% durante 2 minutos o >110% durante 5 minutos. Las causas posibles son:
- error o sobrecarga en la aplicación- convertidor mal dimensionado- motor cableado incorrectamente
Después de un error E.OL, es necesario esperar un tiempo derefrigeración. Este mensaje aparece cuando el tiempo de refrigeracióna terminado. El error puede ser rearmado.
Aparece cuando la temperatura del convertidor sobrepasa los 70°C. Lascausas posibles son:
- refrigeración insuficiente- temperatura ambiente demasiado elevada- ventilador atascado o obstruido
Aparece cuando la sonda térmica externa conmuta. Las causas posibles son:- resistencia en las bornas OH/OH > 1650 Ohm- sobrecarga en el motor- cable roto
El error de sobretemperatura interna o externa ha desaparecido. El error”E.OH” o ”E.dOH” puede rearmarse.
La resistencia de carga de los condensadores no está en corto circuito. Esteerror aparece si durante la conexión de tensión esta se inhibe inmediatamente.Si el mensaje de error reaparece, los motivos pueden ser:
- tensión de alimentación inestable o baja- importante pérdida de tensión en la línea de alimentación- Resistencia de frenado mal conectada- modulo de frenado defectuoso
3. Diagnóstico de errores
Sobretensión
Sobrecarga
Sobrecorriente
Sobretemperatura interna
Fase de refrigeración completada
Fin de sobretemperatura
Error de resistencia de carga
Sobretemperatura externa
119
ANTRIEBSTECHNIK
E
Glossario
4. Glossario El convertidor KEB COMBIVERT posee entradas digitales libres depotencial, es decir la entradas están separadas galvánicamente delos potenciales internos. No existen pues corrientes de igualaciónentre los aparatos. La masa digital es el punto de referencia de estecircuito aisiado. La masa analógica esta directamente atada a lamasa del convertidor. Esta sirve de referencia para todas lasconsignas analógicas.
Compatibilidad electromagnética; Norma concerniente a lasemisiones de parásitos como la utilización segura de los aparatossensibles.
Para las aplicaciones que en ciertas condiciones no necesitan detoda la potencia del convertidor es posible de reducir en esemomento la tensión de salida y ahorrar asi energia.
Salida de rele o de transistor que conmuta en función de unafrecuencia de salida predefinida.
En los sistemas de regulación, se trata de una señal entregada porun sisterna de medida. En los sistemas sin realimentación se tratade un valor calculado.
Detiene la aceleración. Esta función evita la aparición de un errorde sobrecorriente durante la aceleración interrumpiendo la rampade aceleración. La corriente máxima admisible en la aceleración esajustable (CP.14).
RS232 es una comunicación serie normalizada para la comunicacióncon máximo un aparato con una longitud de cable no superior a los15m. RS485 es una comunicación serie normalizada que permitecomandar un máximo de 239 aparatos con una longitud de cable nosuperior a los 1.000m.
Señal analógica o digital transmitida al convertidor con la cual estedebe de funcionar.
Cuando el convertidor se conecte a un motor que esta girando, estafunción permite sincronizarse con la velocidad de giro del motor sindesencadenar un error de sobrecorriente. El convertidor busca lavelocidad del motor y después lo acelera a la frecuencia deseada.
La función "stall" protege al convertidor contra sobrecorrientes enrégimen estable. Cuando la carga del convertidor alcanza el valorajustado en CP.15 el convertidor reduce la frecuencia de salida.Una vez que la carga del convertidor desciende por debajo del valorde CP.15 este aumenta de nuevo la frecuencia de salida.
Masa analógica / digital
CEM
Función de ahorro deenergia
Señal dependiente de lafrecuencia
Valor actual
LA-Stop
RS232/485
Consigna
Búsqueda de velocidad
Stall
120
E
Indice
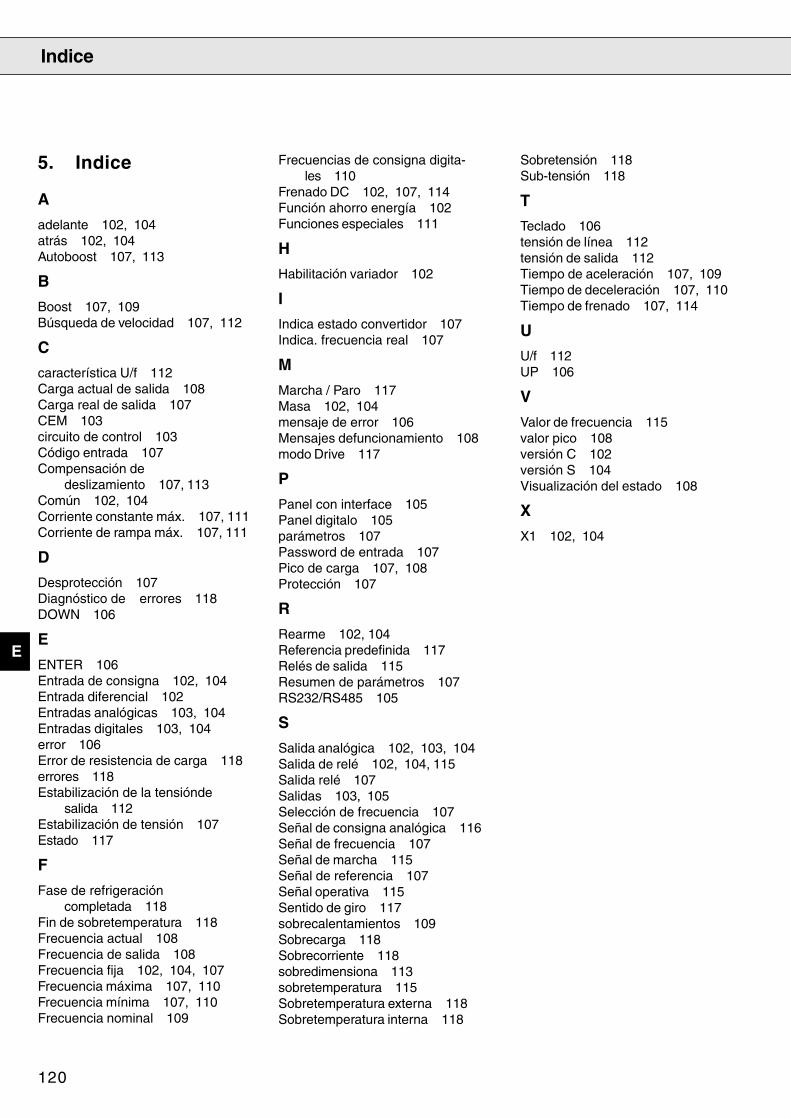
5. Indice
A
adelante 102, 104atrás 102, 104Autoboost 107, 113
B
Boost 107, 109Búsqueda de velocidad 107, 112
C
característica U/f 112Carga actual de salida 108Carga real de salida 107CEM 103circuito de control 103Código entrada 107Compensación de
deslizamiento 107, 113Común 102, 104Corriente constante máx. 107, 111Corriente de rampa máx. 107, 111
D
Desprotección 107Diagnóstico de errores 118DOWN 106
E
ENTER 106Entrada de consigna 102, 104Entrada diferencial 102Entradas analógicas 103, 104Entradas digitales 103, 104error 106Error de resistencia de carga 118errores 118Estabilización de la tensiónde
salida 112Estabilización de tensión 107Estado 117
F
Fase de refrigeracióncompletada 118
Fin de sobretemperatura 118Frecuencia actual 108Frecuencia de salida 108Frecuencia fija 102, 104, 107Frecuencia máxima 107, 110Frecuencia mínima 107, 110Frecuencia nominal 109
Frecuencias de consigna digita-les 110
Frenado DC 102, 107, 114Función ahorro energía 102Funciones especiales 111
H
Habilitación variador 102
I
Indica estado convertidor 107Indica. frecuencia real 107
M
Marcha / Paro 117Masa 102, 104mensaje de error 106Mensajes defuncionamiento 108modo Drive 117
P
Panel con interface 105Panel digitalo 105parámetros 107Password de entrada 107Pico de carga 107, 108Protección 107
R
Rearme 102, 104Referencia predefinida 117Relés de salida 115Resumen de parámetros 107RS232/RS485 105
S
Salida analógica 102, 103, 104Salida de relé 102, 104, 115Salida relé 107Salidas 103, 105Selección de frecuencia 107Señal de consigna analógica 116Señal de frecuencia 107Señal de marcha 115Señal de referencia 107Señal operativa 115Sentido de giro 117sobrecalentamientos 109Sobrecarga 118Sobrecorriente 118sobredimensiona 113sobretemperatura 115Sobretemperatura externa 118Sobretemperatura interna 118
Sobretensión 118Sub-tensión 118
T
Teclado 106tensión de línea 112tensión de salida 112Tiempo de aceleración 107, 109Tiempo de deceleración 107, 110Tiempo de frenado 107, 114
U
U/f 112UP 106
V
Valor de frecuencia 115valor pico 108versión C 102versión S 104Visualización del estado 108
X
X1 102, 104
121
ANTRIEBSTECHNIK
E
D
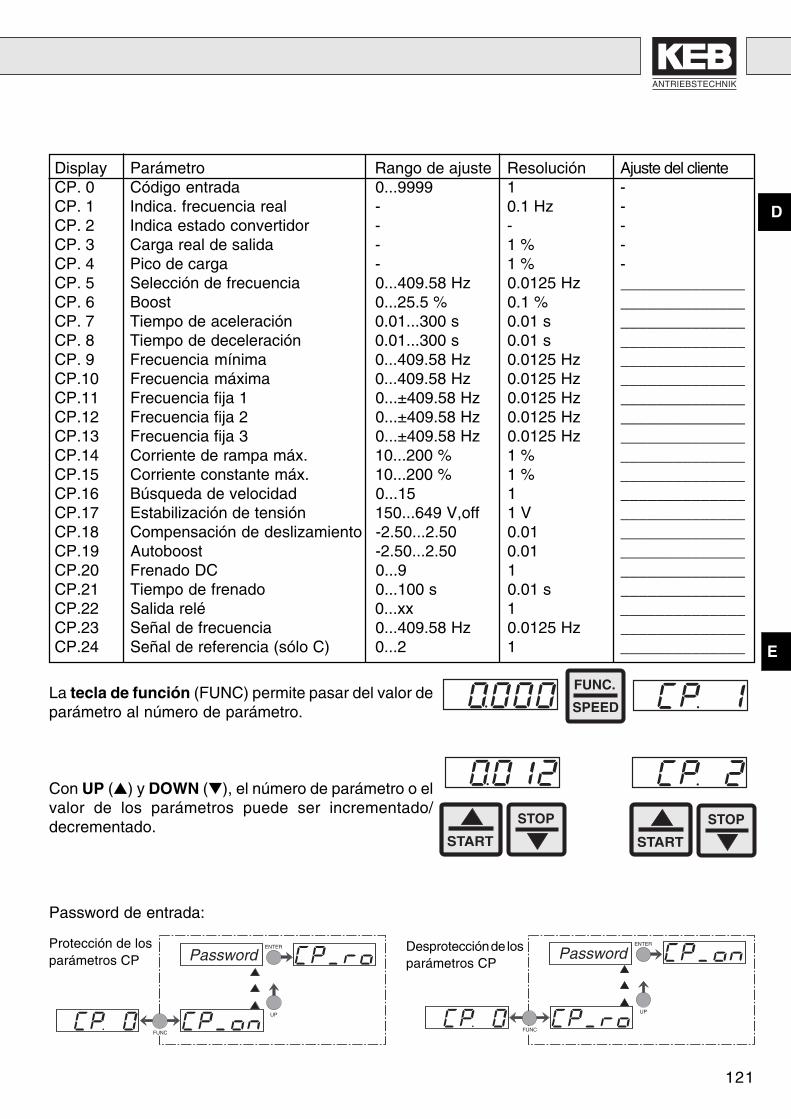
Display Parámetro Rango de ajuste Resolución Ajuste del clienteCP. 0 Código entrada 0...9999 1 -CP. 1 Indica. frecuencia real - 0.1 Hz -CP. 2 Indica estado convertidor - - -CP. 3 Carga real de salida - 1 % -CP. 4 Pico de carga - 1 % -CP. 5 Selección de frecuencia 0...409.58 Hz 0.0125 Hz ______________CP. 6 Boost 0...25.5 % 0.1 % ______________CP. 7 Tiempo de aceleración 0.01...300 s 0.01 s ______________CP. 8 Tiempo de deceleración 0.01...300 s 0.01 s ______________CP. 9 Frecuencia mínima 0...409.58 Hz 0.0125 Hz ______________CP.10 Frecuencia máxima 0...409.58 Hz 0.0125 Hz ______________CP.11 Frecuencia fija 1 0...±409.58 Hz 0.0125 Hz ______________CP.12 Frecuencia fija 2 0...±409.58 Hz 0.0125 Hz ______________CP.13 Frecuencia fija 3 0...±409.58 Hz 0.0125 Hz ______________CP.14 Corriente de rampa máx. 10...200 % 1 % ______________CP.15 Corriente constante máx. 10...200 % 1 % ______________CP.16 Búsqueda de velocidad 0...15 1 ______________CP.17 Estabilización de tensión 150...649 V,off 1 V ______________CP.18 Compensación de deslizamiento -2.50...2.50 0.01 ______________CP.19 Autoboost -2.50...2.50 0.01 ______________CP.20 Frenado DC 0...9 1 ______________CP.21 Tiempo de frenado 0...100 s 0.01 s ______________CP.22 Salida relé 0...xx 1 ______________CP.23 Señal de frecuencia 0...409.58 Hz 0.0125 Hz ______________CP.24 Señal de referencia (sólo C) 0...2 1 ______________
La tecla de función (FUNC) permite pasar del valor deparámetro al número de parámetro.
Con UP () y DOWN (), el número de parámetro o elvalor de los parámetros puede ser incrementado/decrementado.
FUNC.
SPEED
START
STOP
START
STOP
FUNC
ENTER
UP
Password Password
FUNC
ENTER
UP
Desprotección de losparámetros CP
Protección de losparámetros CP
Password de entrada:
122
E

123
ANTRIEBSTECHNIK
E

148
ANTRIEBSTECHNIK
149
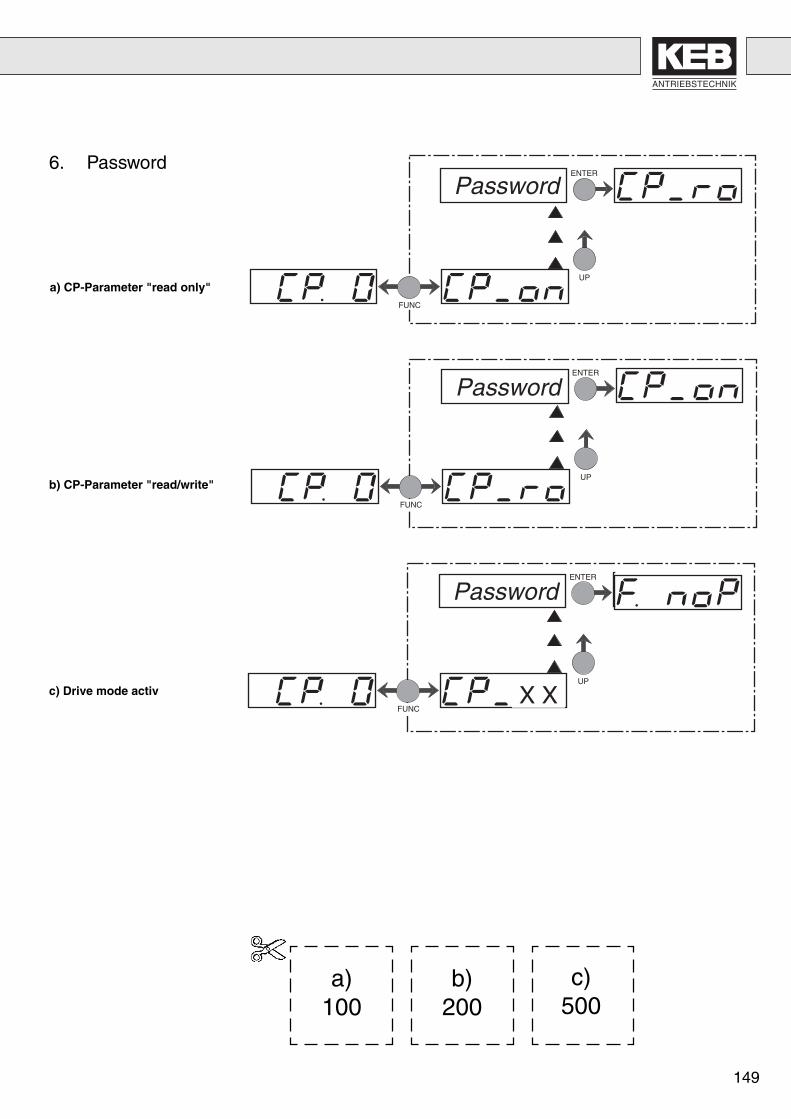
6. Password
FUNC
ENTER
UP
Password
Password
FUNC
ENTER
UP
Password
FUNC
ENTER
UP
X Xc) Drive mode activ
a)100
c)500
b)200
b) CP-Parameter "read/write"
a) CP-Parameter "read only"

150

ANTRIEBSTECHNIK
151

152
ANTRIEBSTECHNIK
153
D Vor Auslieferung durchlaufen alle Produkte mehrfach eine Qualitäts- und Funktionskontrolle, sodaß Fehler auszuschließen sind. Bei Beachtung unserer Betriebsanleitung sind keine Störungen zuerwarten. Sollte sich trotzdem ein Grund zur Reklamation ergeben, so ist das Gerät mit Angabe derRechnungsnummer, des Lieferdatums, der Fehlerursache und der Einsatzbedingungen an unszurückzusenden. Für Fehler, die aufgrund falscher Behandlung, falscher Lagerung oder sonstigenallgemeinen Irrtümern auftreten, übernehmen wir keine Verantwortung. Prospekte, Kataloge undAngebote enthalten nur Richtwerte. Technische Änderungen jeder Art behalten wir uns vor. Alle Rechtevorbehalten. Nachdruck, Vervielfältigung und fotomechanische Wiedergabe sind ohne schriftlicheGenehmigung durch KEB auch auszugsweise verboten.
GB Prior to delivery all products pass several quality and performance inspections so that malfunctionscan be ruled out. When used in accordance with the operating instructions failure is most unlikely.However, if you have cause for complaint the unit should be returned stating invoice number, deliverydate, cause of failure and field conditions. We do not accept the responsibility for failures due to misuse,wrong storage or similar causes. Leaflets, catalogues and quotations contain only standard values. Wereserve the right to make technical changes without obligation. All rights reserved. Any piratic printing,mimeograhing or photomechanical reproduction, even in extracts, is strictly prohibited.
F Avant la livraison tous les produits passent par différents contrôles fonctionnels et qualitatifs demanière à éliminer les mauvais fonctionnements. L'apparition de défauts sur ces produits est trèsimprobable s'ils sont raccordés et utilisés selon les recommandations des manuels d'instructions.Néanmoins, si un défaut apparaissait, le matériel doit être retourné en indiquant le numéro du bon delivraison, la date d'expédition et les détails apparents du défaut ainsi que le type d'application. Unmauvais emploi, de mauvaises conditions de stockage ou d'autres causes de ce type excluent notreresponsabilité en cas de défectuosité. Les documents techniques et commerciaux, les offres de prixne contiennent que des valeurs standards. Nous nous réservons le droit de procéder à des modificationstechniques sans préavis. Tout droit réservé. Toutes contrefaçons imprimées, ou reproductionsphotomécaniques; même partielles, sont strictement interdites.
I Prima di essere spediti, tutti i nostri prodotti sono soggetti a severi controlli di qualità efunzionamento, questo al fine di evitare malfunzionamenti. Se utilizzati seguendo il manuale diistruzione si evita qualsiasi malfunzionamento. Comunque, qualora dovesse verificarsi un guasto,l'unità dovrà essere rispedita specificando il numero di bolla, la data di spedizione, i dettagli del guastoed il tipo di applicazione. Non si assumono responsabilità per errori dovuti a manomissioni, cattivostoccaggio o simili. Ci riserviamo di effettuare qualsiasi modifica senza preavviso alcuno. Tutti i dirittisono riservati. Qualsiasi riproduzione non autorizzata, anche parziale, è rigorosamente proibita.
9;7&7 : (166'?
1681 $968L; &
5 $k(?B (?76:('
L7((&&1B?&?1&L&:
7 7 &$
j( k4 B ' 7 : 7& 7 1( '; : ?
?';6< ;:L61:&&$9?;((1
5 5'171 $e (76&':1
7( 86; $ 4 5 ($ K7(5? 1? @(:1
7?511?67'(;7L @(k47<$
/Z

154

ANTRIEBSTECHNIK
©K
EB
00.F
4.C
0B-K
110
11/0
0SOCIÉTÉ FRANÇAISE
KEB YAMAKYU LTD
UK
ITALIA s.r.l.
ANTRIEBSTECHNIK
KEB Antriebstechnik Austria GmbHRitzstraße 8 • A - 4614 MarchtrenkTel.: 0043 / 7243 / 53586 - 0 • FAX: 0043 / 7243 / 53586-21
KEBCO Inc.1335 Mendota Heights RoadUSA - Mendota Heights, MN 55120Tel.: 001 / 651 / 4546162 • FAX: 001 / 651 / 4546198
KEB (UK) Ltd.6 Chieftain Buisiness Park, Morris ClosePark Farm, Wellingborough, GB - Northants, NN8 6 XFTel.: 0044 / 1933 / 402220 • FAX: 0044 / 1933 / 400724
KEB - YAMAKYU Ltd.711 Fukudayama, FukudaJ - Shinjo City, Yamagata (996-0053)Tel.: 0081 / 233 / 29 / 2800 • FAX: 0081 / 233 / 29 / 2802
KEB Italia S.r.l.Via Newton, 2 • I - 20019 SETTIMO MILANESE (Milano)Tel.: 0039 / 02 / 33500782 • FAX: 0039 / 02 / 33500790
Société Francaise KEBZ.I. de la Croix St Nicolas • 14, rue Gustave EiffelF - 94510 LA QUEUE EN BRIETél.: 0033 / 1 / 49620101 • FAX: 0033 / 1 / 45767495
KEB Antriebstechnik GmbH & Co. KGWildbacher Str. 5 • D - 08289 SchneebergTelefon 0 37 72 / 67 - 0 • Telefax 67 - 2 81
Karl E. Brinkmann GmbHFörsterweg 36 - 38 • D - 32683 BarntrupTelefon 0 52 63 / 4 01 - 0 • Telefax 4 01 - 116Internet: www.keb.de • E-mail: [email protected]
ANTRIEBSTECHNIK





























