Embed Size (px)
Citation preview

1
High Performance Computing on GPU Clusters
Timothy McGuinessa, Ali Khajeh-Saeed
b, Stephen Poole
c and J. Blair Perot
b
aLincoln Laboratories, Lexington, MA, 02420, USA
bDepartment of Mechanical and Industrial Engineering, University of Massachusetts, Amherst, MA, 01003, USA cComputer Science and Mathematics Division, Oak Ridge National Laboratory, Oak Ridge, TN 37831, USA
Abstract
Commodity graphics cards have recently proven to be an inexpensive and effective way to accelerate some
scientific computations. Acceleration using multiple GPUs is more challenging, because the type of
algorithm/parallelism needed to couple many GPUs is very different from the algorithm/parallelism used to
efficiently utilize a single GPU. In this work, four very different applications are evaluated in both the
single and multiple GPU contexts. The algorithms are memory bound, like almost all scientific computing
algorithms. But the memory use differs considerably allowing us to isolate which types of scientific
computing algorithms are likely to benefit from GPU acceleration, and which problems are more easily
solved on traditional CPU clusters.
Keywords: GPGPU, STREAM Benchmark, Smith-Waterman, Graph Analysis, Unbalanced Tree Search.
1. Introduction
The early 2000s saw the development of several high-level shading languages such as Cg [1], HLSL and
OpenGL [2], designed to help exploit the computational power of graphics hardware. These languages
dealt heavily in graphics-specific concepts such as textures and fragments, making it necessary for
scientific programmers to navigate an additional level of abstraction [3]. In late 2006, NVIDIA released
their Compute Unified Device Architecture (CUDA), providing a much more user-friendly general purpose
GPU (GPGPU) programming environment. Using only a few extensions to the C language, CUDA allows
programmers to easily create code for execution on graphics hardware. Even more recently OpenCL has
been introduced allowing code to be written for any GPU hardware.
When used as a math accelerator for scientific algorithms, single GPUs often produce roughly an order of
magnitude performance increase over a similar generation dual or quad core CPU. The tradeoff involved
with GPU computing is that programming efficient code is more difficult, and the hardware is more
specific about when it performs well. This work is intended to delineate the region of applicability of GPU
hardware more definitively. We will show some cases with over 100x speedup over a CPU, and some
which show (despite our best efforts) a performance decrease compared to the CPU. The benchmarks
chosen for this study are interesting because they span a range of applications from very linear memory
access patterns, to regular but non-linear access patterns, to entirely random memory access dominated
algorithms.
This work also explores the algorithmic changes necessary to efficiently program software to use GPU
clusters with hundreds of GPUs. Because of its popularity, this work uses MPI (Message Passing Interface)
as the communication protocol between the GPUs. The paper also explores the performance of GPU
clusters based on dedicated scientific computing GPUs (Tesla), and a cluster built from the lower cost
commodity GPUs (GTX 295 and 480).
The four benchmarks were chosen to span a wide range of different scientific computing applications. The
STREAM benchmark accesses double precision memory linearly. It scales almost directly with the linear
memory access speed of the hardware, and provides an upper bound on the power consumption and
temperature limits achieved by the GPUs. Our next benchmark, DNA sequencing via the Smith-Waterman
algorithm, deals with sequence matching for very large sequences. This task is represented by the Scalable
Synthetic Compact Application (SSCA) #1 benchmark which performs different variants of the Smith-
Waterman algorithm. The classic Smith-Waterman algorithm fills in a large table one anti-diagonal row at

2
a time. When reformulated for the GPU architecture this benchmark shows 100x and 70x speedup over a
single core of a CPU for single GTX 480 and GTX 259 GPU, and a 5335x speedup when using 120 GPUs
(44x faster than a single GPU). The third application is the HPCS SSCA #2 benchmark which analyzes
very large graphs consisting of a set of nodes connected by a set of edges. Graphs are directed and
weighted, meaning edges have specific start and end nodes, as well as a given cost or weight value. This
application depends almost entirely on random memory accesses. Finally, the unbalanced tree search
displays both random memory accesses and the need for dynamic load balancing, since the tree is so large
it must be built „on the fly‟. We describe load balancing techniques both on a single GPU and when using
many GPUs.
Two machines were used for computations, Orion and Lincoln. Orion contains an AMD quad-core Phenom
II X4 CPU, operating at 3.2 GHz, with 4 x 512 KB of L2 cache, 6 MB of L3 cache and 8 GB of RAM. In
terms of GPUs, Orion contains four NVIDIA 295 GTX cards (occupying four PCIe 16x slots) which each
come as two GPU cards sharing a single PCIe slot. When we refer to a single 295 GTX GPU we refer to
one of these two cards, which has 240 cores and a memory bandwidth of 111.9 GB/s. Orion therefore
typically has 8 GPUs. Also we replaced the first and second GPUs with GTX 480 and Tesla C2070 cards
in order to run some cases with these new GPUs. Orion is shown in figure 1. Results on Orion were
compiled using Microsoft Visual Studio 2005 (VS 8) under Windows XP Professional x64. The bulk of
NVIDIA SDK examples use this configuration.
Figure 1. Orion configuration and fan locations (Fan 6 is located on the side of the case, blowing air into the GPUs)
Lincoln is a Teragrid/XSede GPU cluster located at NCSA. Lincoln has 96 Tesla S1070 (384 GPUs).
Lincoln‟s 192 servers each hold two Intel 64 (Harpertown) 2.33 GHz dual socket quad-core processors
with 2 x 6 MB L2 cache and 2 GB of RAM per core. Each server is connected to 2 Tesla processors via
PCI-e Gen2 X8 slots. All code was written in C++ with NVIDIA‟s CUDA language extensions for the
GPU. The Lincoln results were compiled using Red Hat Enterprise Linux 4 (Linux 2.6.19) and the gcc
compiler [4].
2. STREAM Benchmark
The STREAM benchmark is a simple synthetic benchmark program that measures sustainable memory
bandwidth (in MB/s) and the corresponding computation rate for simple vector kernels. The STREAM
benchmark is composed of four kernels. In the first kernel one vector is copied to another within the same
device (a = b, one read and one write). For the second kernel, vector entries are multiplied by a constant
number and the results is written to another vector (a = b, one read and one write). Kernel 3 adds two

3
vectors (a = b + c, two reads and one write). Finally, Kernel 4 is a combination of Kernels two and three,
sometimes referred to as a DAXPY operation (a = b + c, two reads and one write).
This benchmark was computed using a single GPU operating on different vector sizes. Table 1 shows the
specifications for four types of NVIDIA GPUs. The GTX 295 and Tesla S1070 actually house two and four
GPUs respectively. However the hardware specifications below are for one of these GPUs (1/2 of the 295
GTX and 1/4 of the Tesla S1070) [5, 6]. The GTX 480 and Tesla C2070 are the latest generation of GPUs
(Fermi architecture). The tests shown below used 64k blocks with 128 threads each, operating on double
precision vectors. Each GPU kernel was called 100 times, and each kernel performs the STREAM
operation 100 times in that kernel. The timings below are reported for a single STREAM operation (total
time / 10,000).
Table 1. NVIDIA hardware specifications for four different GPUs
2.1 Single GPU
Figures 2 and 3 show the single-GPU execution time and bandwidth for the GTX 295 and 480 GPU and
Tesla S1070 and C2070. For vectors with lengths less 105
elements, the time is nearly constant and the
bandwidth is less than the maximum value for 10 series and 20 series respectively. However, for vector
sizes larger than 105 the bandwidth is close too the maximum value and execution time increases linearly
with vector length. This shows that the startup cost of simply initiating a GPU kernel is high, and large
vector lengths are required for good GPU performance.
Vector Length
Tim
e(m
s)
102
102
103
103
104
104
105
105
106
106
107
107
108
108
109
109
10-3
10-3
10-2
10-2
10-1
10-1
100
100
101
101
102
102
Copy (GTX 295)
Scalar (GTX 295)
Add (GTX 295)
TriAdd (GTX 295)
Copy (GTX 480)
Scalar (GTX 480)
Add (GTX 480)
TriAdd (GTX 480)
Vector Length
Ba
nd
wid
th(G
B/s
ec)
102
102
103
103
104
104
105
105
106
106
107
107
108
108
109
109
10-1
10-1
100
100
101
101
102
102
103
103
Copy (GTX 295)
Scalar (GTX 295)
Add (GTX 295)
TriAdd (GTX 295)
Copy (GTX 480)
Scalar (GTX 480)
Add (GTX 480)
TriAdd (GTX 480)
Figure 2. (a) Time and (b) Bandwidth for single NVIDIA GTX 295 and GTX 480 for the different STREAM kernels.
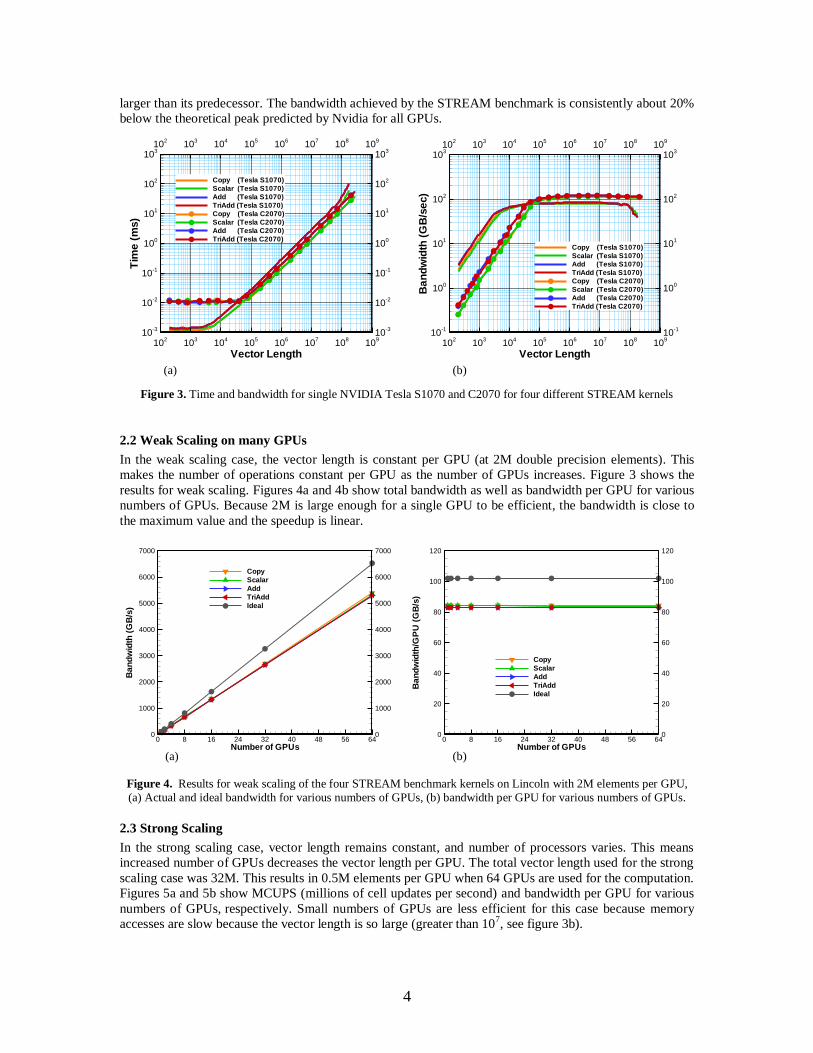
The Tesla S1070 has more memory (4 GB) than the 295 GTX (896 MB). However, Figure 3 shows that for
large vector lengths (greater than 5×107) bandwidth begins to decrease. For the largest possible lengths on
the Tesla S1070, bandwidth is approximately 50% of the maximum value. However, there is no efficiency
loses for Tesla C2070 when using large vector sizes. Also figure 3 shows that for small problem sizes Tesla
S1070 has better performance than C2070. The kernel startup time for the C2070 is an order of magnitude
Model CUDA
Cores
Memory
(MB)
Theoretical
Bandwidth (GB/sec)
Memory Interface
Width (bits)
Max Power
(W)
GTX 295 240 896 119.9 448 145
GTX 480 480 1536 177.4 384 250
Tesla S1070 240 4000 102 512 200
Tesla C2070 448 6000 144 384 238
(a)
(b)
4
larger than its predecessor. The bandwidth achieved by the STREAM benchmark is consistently about 20%
below the theoretical peak predicted by Nvidia for all GPUs.
Vector Length
Tim
e(m
s)
102
102
103
103
104
104
105
105
106
106
107
107
108
108
109
109
10-3
10-3
10-2
10-2
10-1
10-1
100
100
101
101
102
102
103
103
Copy (Tesla S1070)
Scalar (Tesla S1070)
Add (Tesla S1070)
TriAdd (Tesla S1070)
Copy (Tesla C2070)
Scalar (Tesla C2070)
Add (Tesla C2070)
TriAdd (Tesla C2070)
Vector Length
Ba
nd
wid
th(G
B/s
ec)
102
102
103
103
104
104
105
105
106
106
107
107
108
108
109
109
10-1
10-1
100
100
101
101
102
102
103
103
Copy (Tesla S1070)
Scalar (Tesla S1070)
Add (Tesla S1070)
TriAdd (Tesla S1070)
Copy (Tesla C2070)
Scalar (Tesla C2070)
Add (Tesla C2070)
TriAdd (Tesla C2070)
Figure 3. Time and bandwidth for single NVIDIA Tesla S1070 and C2070 for four different STREAM kernels
2.2 Weak Scaling on many GPUs
In the weak scaling case, the vector length is constant per GPU (at 2M double precision elements). This
makes the number of operations constant per GPU as the number of GPUs increases. Figure 3 shows the
results for weak scaling. Figures 4a and 4b show total bandwidth as well as bandwidth per GPU for various
numbers of GPUs. Because 2M is large enough for a single GPU to be efficient, the bandwidth is close to
the maximum value and the speedup is linear.
Number of GPUs
Ba
nd
wid
th(G
B/s
)
0 8 16 24 32 40 48 56 640 0
1000 1000
2000 2000
3000 3000
4000 4000
5000 5000
6000 6000
7000 7000
Copy
Scalar
Add
TriAdd
Ideal
Number of GPUs
Ba
nd
wid
th/G
PU
(GB
/s)
0 8 16 24 32 40 48 56 640 0
20 20
40 40
60 60
80 80
100 100
120 120
Copy
Scalar
Add
TriAdd
Ideal
Figure 4. Results for weak scaling of the four STREAM benchmark kernels on Lincoln with 2M elements per GPU,
(a) Actual and ideal bandwidth for various numbers of GPUs, (b) bandwidth per GPU for various numbers of GPUs.
2.3 Strong Scaling
In the strong scaling case, vector length remains constant, and number of processors varies. This means
increased number of GPUs decreases the vector length per GPU. The total vector length used for the strong
scaling case was 32M. This results in 0.5M elements per GPU when 64 GPUs are used for the computation.
Figures 5a and 5b show MCUPS (millions of cell updates per second) and bandwidth per GPU for various
numbers of GPUs, respectively. Small numbers of GPUs are less efficient for this case because memory
accesses are slow because the vector length is so large (greater than 107, see figure 3b).
(a)
(b)
(a)
(b)

5
Number of GPUs
MC
UP
S
10 20 30 40 50 6010
310
3
104
104
105
105
106
106
Copy
Scalar
Add
TriAdd
Number of GPUs
Ba
nd
wid
th/G
PU
(GB
/s)
0 8 16 24 32 40 48 56 640 0
20 20
40 40
60 60
80 80
100 100
120 120
Copy
Scalar
Add
TriAdd
Ideal
Figure 5. Results of strong scaling of the four STREAM benchmark kernels on the Lincoln with 32M total elements,
(a) MCUPS for different numbers of GPUs, (b) bandwidth per GPU for various numbers of GPUs.
2.4 Power Consumption
Figures 6a and 6b show power consumption for the AMD quad-core Phenom II X4, operating at 3.2 GHz,
and for the GTX 295 GPUs, respectively. This test involved the STREAM Benchmark operating on double
precision vectors of length 2M per GPU. Power was measured at the source to Orion using a watt meter.
Note that 60 W (for figure 6a) is not what the whole machine draws when running idle. At idle it draws
close to 450 W (there are many fans).
Number of Cores (CPU)
Wa
tt
0 1 2 3 4 550 50
60 60
70 70
80 80
90 90
100 100
110 110
120 120
Watt = 12.3 x (Cores) + 60
Number of GPUs
Wa
tt
0 2 4 6 8 100 0
200 200
400 400
600 600
800 800
1000 1000
1200 1200
Watt = 115 x (GPUs) + 31
Figure 6. Power consumption for the weak scaling STREAM benchmark on Orion with the AMD CPU and 295 GTX GPUs.
Each GPU uses approximately 115 W over idle consumption when running the STREAM Benchmark.
Also, it was found that the idle power for one GTX 295 (2 GPUs) is 71 W (or about 30 W per GPU). This
was ascertained by physically removing GPUs from the machine, and re-running the code. The NVIDIA
hardware specifications (table 1) imply that each Tesla S1070 GPU uses more power than the GTX 295
GPUs (200 W vs. 145 W maximum). One reason for this difference could be the amount of memory
supported. The Tesla S1070 has 4000 MB per GPU but the GTX 295 has only 896 MB per GPU. The Tesla
also contains its own power supply and cooling system, which may be playing a role in the difference in
consumption levels. We did not have access to the Tesla hardware (at NCSA) to measure its power
consumption directly.
(a) (b)
(a) (b)

6
2.5 GPU Temperature
The STREAM benchmark was computed on Orion (GTX 295 GPUs) to obtain a measurement of each
GPU‟s temperature. The code was run with 8 GPUs for 331 seconds. Table 2 shows the initial and
maximum temperatures for each GPU, as the STREAM benchmark was running for 331 seconds. The
maximum allowable temperature for the 295 GTX listed on NVIDIA‟s website is 105 oC [5]. The
maximum GPU temperatures range between 88-96 oC when running for this prolonged period of time.
Since most GPGPU applications involve many short kernel calls rather than this type of extended exertion,
GPU temperatures are typically lower than these maximum measured values.
Table 2. Temperatures for GTX 295 cards, running for 331 second STREAM benchmark
Temperature GPU 1 GPU 2 GPU 3 GPU 4 GPU 5 GPU 6 GPU 7 GPU 8
Initial Temp oC 66 64 72 68 72 67 63 61
Max Temp oC 90 88 96 92 96 93 91 88
T oC 24 24 24 24 24 26 28 27
3. SSCA #1 – Sequence Matching
For two candidate sequences, A and B, sequence alignment attempts to find the best matching
subsequences for the pair. The best match is defined in equation 1,
1
( ), ( ) ,L
s eiS A i B i W G G
(1)
where W is a gap function involving the gap start- and gap extension-penalties, (Gs and Ge, respectively)
and the similarity score S, which is user-defined for this implementation. This research uses a simple
scoring system where matching items get a score of 5 and non-matching items have a score of -3. The gap
start-penalty is 8 and gap extension-penalty is 1.
The Smith-Waterman algorithm locates the optimal alignment by building a solution table [8]. The first
data sequence (the database) is typically seeded along the top row, with the second sequence (the test
sequence) in the first column. Table values are denoted as ,i jH with i and j being the row and column
indices, respectively. Other table entries are set using the equation,
1, 1 ,
, ,0
,0
,0
( )
( )
i j i j
i j i k j s ek i
i j k s ek j
Max H S
H Max Max H G kG
Max H G kG
(2)
That is, an entry in the table is the maximum of: the entry diagonally to the upper left plus the similarity
score for the item in that row and column, the maximum of all the entries above the entry and in that same
column minus a gap function, and the maximum of all the entries to the left of the entry and in that same
row minus a gap function, and zero. It is not possible for table values to be negative. Additionally, the
dependencies of table values are such that they cannot be computed in parallel. Finding a particular value in
the table requires knowledge of all the values above and to the left of the value being computed. Figure 7
shows table value dependencies.

7
If equation (2) is naïvely implemented, then the column and row maximums (second and third items in
equation (3) are repetitively calculated for each table entry creating O(L1L2(L1+L2)) computational work.
This can be reduced by retaining the previous row and column sums [9] which reduces the work
significantly but triples the algorithm‟s required storage space. The classic parallelization technique for this
algorithm is to work along anti-diagonals [10]. It should be clear from the dependency region that each
diagonal item can be calculated independently of the others. This means the diagonal algorithm only
performs efficiently on a single GPU when the shorter of the two sequence lengths is 30k or larger.
Sequence lengths of this size are uncommon in biological applications, but this is not the true problem with
the diagonal algorithm. The primary issue with the diagonal approach is memory accesses patterns. On the
GPU it is very efficient to access up to 32 consecutive memory locations, and relatively (5-10x slower)
inefficient to access random memory locations such as those dispersed along the anti-diagonal (and its
neighbors). To get around this problem, it was shown that the Smith-Waterman algorithm can be
reformulated so calculations can be performed simultaneously one row (or column) at a time [11, 12]. Row
(or column) calculations allow GPU memory accesses to be consecutive, and therefore fast.
3.1 Results
The first kernel computes the Smith-Waterman table is saves the largest table values (200 of them) and
their locations. These serve as the end points of well-aligned sequences, but the sequences themselves are
not constructed or saved until Kernel 2. Because the traceback step is not performed in Kernel 1, the
amount of data needed in GPU memory from the table is minimal. For example, in the row-parallel version,
only the data from the previous row needs to be retained, making Kernel 1 both memory-efficient and
highly parallel on a fine scale. The results for four different GPUs are shown in Fig. 8. The weak scaling
timings are shown in Fig. 9a, for the case using a 2M-elements database per GPU, and a 128-element test
sequence. Obviously, the amount of work being performed increases proportionally with the number of
GPUs used. The total times are from 380–480 ms, and they increase slowly with the number of GPUs used.
Figure 9b shows speedups for Kernel 1 compared to a single-CPU version. Compared to a single core of
the CPU, the speedup is 100x for a single GPU, and 5335x for 120 GPUs. Figures 10a and 10b show
speedups for Kernel 2. Kernel 2 is not very sensitive to sequences length and does not show nearly as large
of a speedup. The complexity of kernel 2 means that the GPU performs at roughly the same speed as all the
cores on the CPU.
0 C A G C C U C G C U G
0 0 0 0 0 0 0 0 0 0 0 0 0
A 0 0 5 0 0 0 0 0 0
A 0 0 5 2 0 0 0 0 0
U 0 0 0 2 0 0 5 0 0
G 0 0 0 5 0 0 0 2 5
C 0 5 0 0 10 5 0 5 0
C 0 5 2 0 5 15 6 5 4
A
U
G
C
G
Figure 7. Dependency of the values in the Smith-Waterman table.

8
Size
Tim
e(s
)
106
107
108
109
1010
1011
10-1
10-1
100
100
101
101
102
102
103
103
104
104
9800 GT
9800 GTX
295 GTX
Tesla S1070
480 GTX
CPU 3.2 MHz
Size
Sp
ee
du
p
106
107
108
109
1010
1011
0 0
20 20
40 40
60 60
80 80
100 100
120 120
9800 GT
9800 GTX
295 GTX
Tesla S1070
480 GTX
Figure 8. Results for four different GPUs timings (a) and speedups (b) for Kernel 1.
Kernel 1 performed particularly well on the GPU for the SSCA #1 benchmark because it was possible to
reformulate the Smith-Waterman algorithm to use sequential stride 1 memory accesses. Since each
sequential memory access can be guaranteed to come from a different memory bank these accesses will
occur simultaneously. The parallel scan was a critical component of being able to perform this
reformulation. The parallel scan operation may currently be under-utilized and might be effectively used in
many other scientific algorithms as well.
On the other hand, the speedups demonstrated by the already very fast Kernel 2 were not as impressive.
The naïve algorithms for these tasks are parallel but also MIMD. Because this kernel executes so quickly
already there was little motivation to find SIMT analogs and pursue better GPU performance. Fortunately,
every GPU is hosted by a CPU, so users are not forced to use a GPU if the task is not well suited to the
hardware. It is important to keep in mind that the GPU is meant to be a supplement to the CPU. This paper
is intended to give the reader insight into which types of tasks will do well when ported to the GPU and
which will not.
Number of GPUs
Ke
rne
l1
Tim
e(m
s)
0 20 40 60 80 100 120300
320
340
360
380
400
420
440
460
480
500
Number of GPUs
Ke
rne
l1
Sp
ee
du
p
0 20 40 60 80 100 1200
500
1000
1500
2000
2500
3000
3500
4000
4500
Figure 9. Weak scaling timings (a) and speedups (b) for Kernel 1 using various numbers of GPUs on Lincoln.
(a) (b)
(a) (b)

9
Number of GPUs
Ke
rne
l2
Tim
e(m
s)
0 20 40 60 80 100 1200
5
10
15
20
25
30
Number of GPUs
Ke
rne
l2
Sp
ee
du
p
0 20 40 60 80 100 1200
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
Figure 10. Weak scaling timings (a) and speedups (b) for Kernel 2 using various numbers of GPUs on Lincoln.
The issue of programming multiple GPUs is an interesting one, because it requires the use of a totally
different type of parallelism. A single GPU functions well with massive fine grained (at least 30k threads)
nearly SIMD parallelism. With multiple GPUs, located on different computers, communicating via MPI
and Ethernet cards, course grained MIMD parallelism is needed. Due to this, all multi-GPU
implementations partition the problem coarsely into subsets for the GPUs, and then use fined grained
parallelism within each GPU.
4. SSCA #2 – Graph Analysis
The graphs for this benchmark consist of a set of nodes, connected by a set of directed edges. The size of
the graph is given by the user-defined variable SCALE. The number of nodes in the graph is 2SCALE
, and the
number of edges is eight times the number of nodes [13]. A node‟s degree value is the number of edges
pointing out from it. Because there are eight times as many edges as nodes, the average nodal degree is
eight. The histogram in figure 11 shows the number of nodes for any given degree value. Graphs are
constructed so that there are a few nodes with very high degrees. These graphs are examined using four
timed kernels, described in the following sections.
Figure 11. Statistical distribution of edges for a typical SCALE 21 graph.
4.1 Kernel 1 – Graph Construction
The original edge list is presented as three lists; start node, end node and edge weight. The purpose of the
first kernel is to convert this data structure into the format that the remaining kernels will use. The graph
may be represented in any format, but this new data structure cannot be altered after Kernel 1.
(a) (b)

10
The new structure used in the GPU code is a node-to-node (N2N) system. This structure uses two arrays – a
shorter list of pointers, and a longer list of children. In the pointer list, the entry at position p is a location q
in the child array; the location where parent p‟s children are saved. The pointer list is „number of nodes‟
long, since each node in the graph can be treated as a parent, and the child list is „edges‟ long, because it
stores all the end nodes from the original edge list. A simple way to think of building N2N, is by sorting the
original list according to start node. In this case, the list of start nodes would then consist of large groups of
1‟s, 2‟s, 3‟s, etc. This array is condensed into a list of where the 1‟s, 2‟s and 3‟s – and hence, their children
– begin. An illustration of this conversion is shown in figure 12.
Figure 12. Conversion from (a) original edge list, to (b) sorted by start node, and finally to (c) N2N format.
The code performs this conversion in three steps. First, nodal degrees are counted by looping over each
edge, and incrementing an array of counters corresponding to start nodes. Next, this list of degrees is
converted into the pointer list, using an operation known as a parallel scan [14]. The scanned pointer value
for a node is the sum of the degree values for all preceding nodes. The final step builds the child list using
the newly created pointer list. A loop finds each edge‟s start node and the corresponding pointer, and
inserts the edge‟s end node into the child array at that location. Care must be taken to offset individual end
nodes from the pointer to ensure unique locations in the child list.
It is worth nothing that Kernel 1 not only builds the standard N2N structure, which follows the true
direction of the edges (N2Nout), but it also builds a second N2N structure that goes “against the grain”
(N2Nin). This second version has proven useful for the parallel implementations of Kernels 2 and 4.
4.2 Kernel 2 – Find Max-Weight Edges
Kernel 2 searches through edge weights and picks out those with the largest possible value. The use of the
N2N data structure actually makes this task more challenging. In the original edge list, weights are paired
with data for both nodes. In the new structure, weights are only associated with one node, and finding the
second is non-trivial.
For this algorithm, threads search the weight list in the N2Nin structure for max-weight values. When a
max-weight is found, the corresponding node (the edge‟s start node) is saved. Using this node and the
N2Nout pointer list, the GPU finds the location of that node‟s children, and searches this limited region for a
max-weight edge. When the weight is found, the corresponding node (the edge‟s end node) is paired with
its start node.
Due to the benchmark‟s specifications regarding number of edges and weight distribution, there are on
average only eight max-weight edges in any graph, regardless of SCALE. As a result, this kernel has
relatively little work to do, and is easily the fastest of the four timed tasks.
4.3 Kernel 3 – Subgraph Construction
The third kernel of SSCA 2 is designed to construct subsets (or subgraphs) of the original graph, using the
edges found in Kernel 2 as starting points. Kernel 3 starts at a max-weight edge, and moves out a user-
specified number of levels from it.

11
The final output of Kernel 3 is a list of nodes which representing the members of the subgraph. This list,
called the queue, is built in sections, which are filled as the code steps out to each new level of the
subgraph. The code reads parent nodes from the current level, and fills in their children in the next level.
The most challenging part of parallelizing this code is determining where to insert children into the queue.
Each thread needs its own dedicated space in the queue, and must know where that space begins. This is
done by storing count and point arrays which correspond to the queue. When a node is added to the queue,
its number of children is recorded in the count array. After each level is filled, this array is scanned into the
point array, which then tells the queue location for that node‟s children. This process is illustrated in figure
13. Before a child is inserted into the queue, the code tests to ensure it has not already been added. This
eliminates extraneous queue entries, limits the amount of required memory, and provides a natural stopping
point for the following kernel.
Figure 13. Construction of the Kernel 3 queue. (a) the first node in the queue, with its number of children, and the
location they will be written to, (b) the second generation, and the scanned point array (c) part of the third generation.
4.4 Kernel 4 – Betweenness Centrality
The goal of Kernel 4 is to determine which nodes have the highest connectivity, or betweenness centrality
(BC). For a particular starting node, partial BC scores are calculated for all other nodes. This process is
repeated using a subset of nodes as starting points. A node‟s final BC value is the sum of all its partial
scores. This is easily the most computationally-taxing portion of the SSCA 2 code.
As proposed by Brandes [15], and Bader and Madduri [16], the BC algorithm consists of two main steps.
The outsweep assigns nodal values of distance to and number of shortest paths back to the start node. This
process is conducted in the same manner as Kernel 3, moving out visiting new generations, level by level.
The only differences are nodal values need to be assigned now in addition to just filling the queue, and the
algorithm must continue for as long as it takes to visit all nodes. Assigning depth and shortest path values is
trivial, and since each node can only appear once in the queue, the final queue level will be empty, and the
algorithm will stop on its own.
The insweep works through the queue backwards, level by level. As the code moves in (from child to
parent) along shortest paths, the child‟s BC and shortest paths values are used to update the BC score for
the parent. The N2Nin data structure – carefully marked during the outsweep – is used to determine if
parents lie along these shortest paths. In equation 3, υ and ω represent parent and child nodes, respectively.
A node‟s temporary BC score (reset after each outsweep / insweep pair) is represented by δ, while σ is a
node‟s shortest path value.
1
(3)
One of the problems frequently encountered during SSCA 2 is when multiple GPU threads attempt
simultaneous reads or writes to the same memory location. This never occurs in serial versions since only a
single core is active, working on a single data element. The simplest solution to this problem is atomic
functions, which are built into the CUDA API. These perform a simple locking procedure to serialize all

12
threads in the device attempting concurrent reads/writes. These are essential to several parts the SSCA 2
code – particularly for finding nodal degrees in Kernel 1. However, these operations only work with integer
values, and are therefore, limited.
4.5 Results
The parallel SSCA #2 code uses MPI to run on up to 128 GPUs simultaneously. Comparisons to a single
CPU refer to the HPCS optimized code provided with the benchmark. The GPU timings reported in figure
14 are from trials conducted on the Lincoln cluster. Results on up to four cards on the Orion machine can
be found in [17].
Number of GPUs
Sp
ee
du
p(C
PU
)
10-1
100
101
102
10310
0
101
102
103
Kernel 1
Kernel 2
Kernel 3
Kernel 4
Number of GPUs
Sp
ee
du
p(G
PU
)
10-1
100
101
102
10310
-1
100
101
102
103
Kernel 1
Kernel 2
Kernel 3
Kernel 4
Figure 14. Strong scaling speedups for Kernels 1–4 (a) relative to a single CPU core,
and (b) relative to a single GPU. All tests were run for a SCALE 21 graph.
The results are also compared with HPC CPU code that is optimized for multi-core CPUs. Figure 15 shows
that with equal number of GPUs and CPU cores, we achieved 30, 0.4 and 4 speedup for Kernel 1, 3 and 4
respectively. Kernel 4 is by far the most computationally demanding of the four kernels and only shows a
speed up of 4. This means the GPU is performing roughly like a quad-core CPU for this benchmark.
GPUs
Sp
ee
du
p
2 4 6 8 10 12 14 161810
-110
-1
100
100
101
101
102
102
Kernel 1
Kernel 3
Kernel 4
Figure 15. Speedup for GPUs comparing with equal number of CPU cores with HPC code
Several important conclusions can be drawn from this data. First, GPU performance is better for larger
problem sizes. This is a trend that is clearly evident when speedups are compared for multiple SCALEs,
and when GPU and CPU results are directly compared (not pictured). For small graphs, the GPU was not
able to produce the expected speedups, however as SCALE size increased, timings began moving closer to
the theoretical performance. In Kernel 2, each GPU operates on a portion of the N2N list. As the number of
(a) (b)

13
GPUs increases, the workload decreases. The results in figure 8 show that for fewer GPUs, Kernel 2‟s
performance is as expected. When more GPUs are used, and individual workload decreases, performance
declines considerably.
A second, related conclusion is that given enough work, performance scales with number of processors
used. While this may seem obvious, it is not always an easy relationship to attain. Inefficient algorithms,
overhead for memory copies and kernel invocations, and restrictions on problem size can all erode the
expected efficiency of the GPU. The results for Kernels 3 and 4 show that for large SCALEs, doubling
processing power does indeed halve the required time almost exactly. It is not surprising that this trend is
apparent on the two most computationally-intense kernels. It is worth noting that the plateau in
performance for Kernel 3 is due to the number of max-weight edges – and hence subgraphs to be built – in
the SCALE 21 graph. There were exactly eight of these edges in this graph, and since each card builds one
subgraph at a time, using any more than eight GPUs meant they were idle in this case.
A final conclusion is that MPI carries a high cost. While MPI allows large scale cluster parallelization, it
can also slow down program execution considerably, which was particularly evident in the results for
Kernel 1. Compared to the other kernels, this portion of the code requires the most MPI communication in
terms of number of calls and amount of data transferred. Here, more GPUs means a reduced workload per
card, as well as a higher volume of MPI interaction, making this kernel particularly inefficient for multi-
GPU runs. A way around this is to try and hide the MPI and CUDA communication using non-blocking
MPI sends and receives and asynchronous CUDA memory copies. These operations are performed in the
background while computational tasks can be worked on at the same time.
5. Unbalanced Tree Search
The Unbalanced Tree Search (UTS) benchmark performs an exhaustive search on an unbalanced tree. The
tree is generated on the fly using a splittable random number generator (RNG) that allows the random
stream to be split and processed in parallel while still producing a deterministic tree. There are two kinds of
trees evaluated in this work, binary trees and geometric trees (Fig. 16). The binary tree is based on a
probability that each node can have children (or not). For the binary tree, each node either has 8 children or
none at all. For the geometric tree, each node has 1 to 4 children with the number of children being
assigned randomly. These geometric trees are terminated at a predefined level. Nodes greater than the
terminating level have no children.
Figure 16. Representations of (a) a binary tree, with nodes having 0 or 8 children,
and (b) a geometric tree, with 1-4 randomly assigned children.
There are two well-known schemes for dynamic load balancing, work sharing and work stealing. In a work
sharing approach there is a global shared queue, and each processor has its own chunk of data. If the
number of nodes on a processor increases beyond fixed number, then it will start to write the extra data to
the shared queue. Similarly, if there are not enough nodes on a processor, it will start to read nodes from the
queue. Conversely, in work stealing there is no central queue. When there are not enough nodes for a
processor to work on, it borrows nodes directly from processors that have too many. The advantage of work
stealing is that there is no communication when all processors are working on their own data set, making
this a stable scheme. In contrast, work sharing can be unstable because it requires load balancing messages
to be sent even when all processors have work to do [18]. Unfortunately, neither approach is particularly
well-suited for the GPU because it is not possible to communicate directly between two GPUs. All
(a) (b)

14
communication must go through the CPU in order to use MPI. Copying data from the GPU to the CPU or
vice versa is expensive and should be avoided. To circumvent these problems, load balancing is divided
into two parts, load balancing between the CPUs and load balancing on the GPU.
Each computational team is comprised of one CPU and one GPU – each with its own queue. Each GPU
works on computation while the CPUs perform the load balancing via MPI. After launching the GPU
kernel, the CPUs begin load balancing amongst themselves. For this CPU balancing, they rank themselves
by nodes per process, and then begin sending work to one another based on this ranked list. The protocol
for load redistribution is that the CPU with the most work shares with the CPU with the least amount of
work, the CPU with the second most work shares with the CPU with the second least work, and so on. For
GPU when it finishes its work, it begins reading new data from the CPU. If a GPU has too much work, it
will periodically stop and deliver that data to the CPU to be redistributed elsewhere. The GPU memory
copies to and from the CPU are easily overlapped with GPU computation using the cudaMemcpyAsync
command [19].
Figure 17. Load balancing algorithm for the Unbalanced Tree Search
The last box in figure 17 represents two check conditions. The whole UTS algorithm is inside the while
loop. If the number of nodes in every GPU is equal to zero the program is terminated. Figure 18 shows
results for two different tree searches using various numbers of GPUs. The binary tree is started with 5000
nodes and the maximum depth of the tree is 653. The total number of nodes is 1,098,896. The geometric
tree is started with four nodes and has a maximum depth of 12.
Number of GPUs
Sp
ee
du
p(C
PU
)
0 1 2 3 40
0.5
1
1.5
2
2.5
3
3.5
4
Geometric Tree
Binary Tree
Number of GPUs
Sp
ee
du
p(G
PU
)
0 1 2 3 40
0.5
1
1.5
2
2.5
3
Geometric Tree
Binary Tree
Figure 18. Strong scaling speedups for the unbalanced tree search (a) relative to a single CPU core
and (b) relative to a single GPU using the GTX 295 GPUs (Orion).
UTS_Kernel (Tree1)
CPUs Load Balancing
Asynchronous Copy from
CPU to GPU (Tree2)
If (Nodes < C1 )
Tree1=Tree2
If (Nodes > C2 )
Asynchronous Copy from GPU to CPU
(a) (b)

15
Because the binary tree starts with only 5,000 nodes, there is not enough work initially for even a single
GPU. Also, the random number generator is so fast that it is not possible to successfully hide load
balancing. For the geometric tree, again, there is not enough work to require multiple cards until the tree
grows beyond level 7. Additionally, once this level is reached, the geometric tree begins to grow very fast,
so running tests for large trees requires huge amounts of memory. Finally, like the binary tree, the random
number generator is very fast compared to data transfers via MPI. For all binary tree searches and for the
first 7 levels of the geometric tree, the CPU is capable of putting all the data in its cache. For load
balancing, the GPU has to exit the kernel and write data to global memory that is 100 times slower than the
CPU‟s cache memories. So for this application, with very random memory accesses, the GPU is
performing similarly to a single CPU core. In addition, trying to parallelize the GPU algorithm does not
help the performance.
6. Discussion
This work shows that the performance of GPUs for high performance computing problems is highly
dependent on the type of memory access an algorithm is using. The STREAM benchmark, which requires
only long linear memory accesses showed a 25x increase over one core of a CPU. The SSCA#1 benchmark
achieved a 100x increase once the standard algorithm was reformulated to better utilize linear memory
accesses. This required a new form of the Smith-Waterman algorithm and the use of a parallel scan
operation. The graph benchmark (SSCA #2) could not be reformulated. It achieved a speedup over a single
CPU core (for the important Kernel 4) of only about 4x. Similarly, the unbalanced tree search was only
marginally faster than (or sometimes slower) than the CPU, because of the large number of random
memory accesses. The performance of the unbalanced tree search could be improved by using a much
larger tree, and by having a tree search that does more work per each node than just traversing the tree.
The evolution of algorithms from a single GPU to many GPUs is nontrivial. The type of large scale and
coarse parallelism required to use many GPUs connected via a relatively slow interconnect (and MPI), is
completely different from the very fine grained parallelism which ports easily to the many threads on
each GPU. Algorithms that run on GPU clusters therefore require parallelism to be present, and efficiently
captured by the algorithm, on two very different levels. This will make the problem of automatic compiler
parallelization for GPU clusters an even more difficult problem than it is on existing CPU clusters.
Our tests of temperature and power consumption on the GPUs show that GPUs are not as attractive on a
speed per Watt basis as they are on a speed per dollar basis. For the STREAM benchmark each GPU is
using just under 5 times more power than a single CPU core. So on a speed per Watt basis the GPU is only
about 5x better than a CPU for this benchmark. It is not presented in this paper, but we have noted that
power consumption is closely related to memory bandwidth. The other benchmarks do not draw as much
power as the STREAM benchmark, perhaps because they can not achieve the same bandwidth for random
memory access transactions.
Acknowledgements
This work was supported by the Department of Defense and used resources from the Extreme Scale
Systems Center at Oak Ridge National Laboratory. Some of the computations were performed on the NSF
Teragrid/XSede supercomputer, Lincoln, located at NCSA.
References
[1] Mark, W.R., et al. Cg: a system for programming graphics hardware in a C-like language. in
International Conference on Computer Graphics and Interactive Techniques. 2003. San Diego,
California: Association for Computing Machinery.
[2] Kessenich, J., The OpenGL Shading Language. 1.50.09 ed, ed. D. Baldwin and R. Rost. 2009.
[3] Owens, J.D., et al., A Survey of General-Purpose Computation on Graphics Hardware. Computer
Graphics Forum, 2007. 26(1): p. 80-113.
[4] http://www.ncsa.illinois.edu/UserInfo/Resources/Hardware/Intel64TeslaCluster/
[5] http://www.nvidia.com/object/product_geforce_gtx_295_us.html
16
[6] http://www.nvidia.com/object/product_tesla_s1070_us.html
[7] D. Gusfield, Algorithms on Strings, Trees, and Sequences, Cambridge University Press, 1997.
[8] T. F. Smith, M. S. Waterman, Identification of common molecular subsequences, J Mol Biol 147
(1981) 195-197.
[9] O. Gotoh, An Improved Algorithm for Matching Biological Sequences, J Mol Biol 162 (1982)
705-708.
[10] Storaasli, Olaf, Accelerating Science Applications up to 100X with FPGAs, Proc. of 9th Int‟l
Workshop on State-of-the-Art in Scientific and Parallel Computing, Trondheim, Norway, May
13-16, 2008.
[11] A. Khajeh-Saeed, S. Poole and J. B. Perot, Acceleration of the Smith–Waterman algorithm using
single and multiple graphics processors, J. Comput. Phys. 229 (2010) 4247–4258
[12] A. Khajeh-Saeed, J. B. Perot, GPU-Supercomputer Acceleration of Pattern Matching, GPU
Computing Gems Emerald Edition, Morgan Kaufmann Publishers, Chapter 13, January 2011,
185-198.
[13] HPCS, HPC Scalable Graph Analysis Benchmark, Version 1.0, D.A. Bader, et al., Editors. 2009.
[14] Harris, M., Parallel Prefix Sum (Scan) with CUDA, in NVIDIA CUDA SDK, Version 2.3, 2009:
NVIDIA Corporation
[15] Brandes, U., A faster algorithm for betweenness centrality. Journal of Mathematical Sociology,
2001. 25(2): p. 163-177.
[16] Bader, D.A. and K. Madduri. Parallel Algorithms for Evaluating Centrality Indices in Real-
World Networks. in Parallel Processing. 2006. Columbus, Ohio.
[17] T. McGuiness and J.B. Perot, Parallel Graph Analysis and Adaptive Meshing using Graphics
Processing Units, 2010 Meeting of the Canadian CFD Society, London, Ontario, 2010.
[18] J. Dinan, S. Olivier, G. Sabin, J. Prins, P. Sadayappan, and C. Tseng, Dynamic Load Balancing
of Unbalanced Computations Using Message Passing, Parallel and Distributed Processing
Symposium, 2007.
[19] NVIDIA CUDA Programming Guide, Version 4.0. 2011: NVIDIA Corporation.








![Discrete calculus, introduction · Discrete calculus, introduction Tristan Roussillon 09/09/2013 [GP2010] Leo J. Grady and Jonathan R. Polimeni. Discrete calculus. Applied analysis](https://img.pdfslide.net/doc/110x75/5f0f8efe7e708231d444c25d/discrete-calculus-introduction-discrete-calculus-introduction-tristan-roussillon.jpg)



![DISCRETE EXTERIOR CALCULUS arXiv:math/0508341v2 ...arXiv:math/0508341v2 [math.DG] 18 Aug 2005 DISCRETE EXTERIOR CALCULUS MATHIEU DESBRUN, ANIL N. HIRANI, MELVIN LEOK, AND JERROLD E](https://img.pdfslide.net/doc/110x75/60b7a1cc2888b721ac372341/discrete-exterior-calculus-arxivmath0508341v2-arxivmath0508341v2-mathdg.jpg)
















