Embed Size (px)
Citation preview

Faulty Stochastic LDPC Decoders Over the Binary SymmetricChannel
C. Kameni Ngassa 1 2, V. Savin 2 & D. Declercq 1
1 ETIS / ENSEA - Université de Cergy-Pontoise - CNRS UMR 805195000 Cergy-Pontoise Cedex, France
2 CEA-LETIMinatec Campus, 38054 Grenoble cedex 9, France
August 19, 2014

Introduction LDPC Codes and Stochastic Decoding Faulty Stochastic Decoder Monte-Carlo Simulation Conclusion
Contents
1 Introduction
2 LDPC Codes and Stochastic Decoding
3 Faulty Stochastic Decoder
4 Monte-Carlo Simulation
5 Conclusion
ISTC 2014 | Kameni Ngassa, Savin, Declercq | August 19, 2014 2 / 20

Introduction LDPC Codes and Stochastic Decoding Faulty Stochastic Decoder Monte-Carlo Simulation Conclusion
Introduction
MotivationsFuture generation of communication systems will need to deal with hardware failureIncreasing interest on LDPC decoders in presence of unreliable components :
recent works on faulty Gallager A [Varshney’11] and Gallager B [Yazdi’13] decoderswe previously studied faulty Min-Sum decoders [Kameni’13]
Our previous resultsThe robutness to hardware of the Min-Sum decoder is significantly improved whenthe sign bit of exchanged messages is protected.
However it might be difficult to protect only the most significant bit of messages
IntuitionStochastic decoder might be inherently robust to noise from unreliable componentbecause
messages exchanged in the decoder are random ;
information is represented using bits of similar significance ;
timing errors can be tolerated in stochastic decoder [Perez’13].
ISTC 2014 | Kameni Ngassa, Savin, Declercq | August 19, 2014 3 / 20

Introduction LDPC Codes and Stochastic Decoding Faulty Stochastic Decoder Monte-Carlo Simulation Conclusion
LDPC Codes and Stochastic Decoding
LDPC Codes and Belief Propagation algorithmCapacity approaching linear block codes
Sparse parity check matrix
Bipartite graph representation and message-passing algorithmBelief Propagation decoding
Drawback : computationally complex
Stochastic DecodingStochastic implementation of the probability-domain BP
Convert probability beliefs into streams of random bitsAdvantages :
simple logic gates to perform complex arithmetic operationsonly one bit exchanged at each iterationless the number of wires in the circuit [Sharifi’08]
ISTC 2014 | Kameni Ngassa, Savin, Declercq | August 19, 2014 4 / 20
Introduction LDPC Codes and Stochastic Decoding Faulty Stochastic Decoder Monte-Carlo Simulation Conclusion
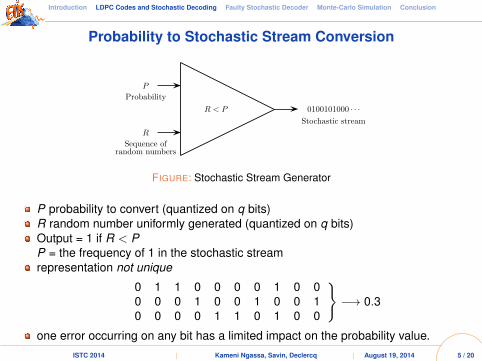
Probability to Stochastic Stream Conversion
R < P
P
Probability
R
Sequence ofrandom numbers
0100101000 · · ·Stochastic stream
FIGURE: Stochastic Stream Generator
P probability to convert (quantized on q bits)R random number uniformly generated (quantized on q bits)Output = 1 if R < PP = the frequency of 1 in the stochastic streamrepresentation not unique
0 1 1 0 0 0 0 1 0 00 0 0 1 0 0 1 0 0 10 0 0 0 1 1 0 1 0 0
}−→ 0.3
one error occurring on any bit has a limited impact on the probability value.ISTC 2014 | Kameni Ngassa, Savin, Declercq | August 19, 2014 5 / 20

Introduction LDPC Codes and Stochastic Decoding Faulty Stochastic Decoder Monte-Carlo Simulation Conclusion
From Belief Propagation to Stochastic DecodingAlgorithm
Check-to-variable node processing
Probability domain BP
αm,1
αm,2
αm,k
βm,n
1
2
k
m n
βm,n =12− 1
2
∏n′∈H(m)\n
(1− 2αm,n′ ) (1)
Stochastic Decoding Algorithm
am,1am,2
am,k−1am,k
bm,n
bm,n = XORn′∈H(m)\n
(am,n′
)(2)
ISTC 2014 | Kameni Ngassa, Savin, Declercq | August 19, 2014 6 / 20

Introduction LDPC Codes and Stochastic Decoding Faulty Stochastic Decoder Monte-Carlo Simulation Conclusion
From Belief Propagation to Stochastic Decoding
Variable-to-check node processing
Probability domain BP
β1,n
β2,n
βl,n
αm,n
γn
1
2
l
n m
αm,n =
γn∏
m′∈H(n)\mβm′,n(
γn∏
m′∈H(n)\mβm′,n
)+
((1− γn)
∏m′∈H(n)\m
(1− βm′,n)
) (3)
ISTC 2014 | Kameni Ngassa, Savin, Declercq | August 19, 2014 7 / 20

Introduction LDPC Codes and Stochastic Decoding Faulty Stochastic Decoder Monte-Carlo Simulation Conclusion
From Belief Propagation to Stochastic Decoding
Variable-to-check node processing
Stochastic Decoding AlgorithmDivision in stochastic computing : JK flip-flop
J
K
Q
b1,nb2,nbl,n cn
am,n
j(`) k(`) q(`)
0 0 q(`−1)
0 1 01 0 11 1 q(`−1)
TABLE: JK flip-flop truth table
Pq =Pj
Pj + Pk(4)
a(`)m,n =
{c(`)
n , if c(`)n = b(`)
m′,n, ∀m′ ∈ H(n) \m
a(`−1)m,n , otherwise
(5)
ISTC 2014 | Kameni Ngassa, Savin, Declercq | August 19, 2014 8 / 20
Introduction LDPC Codes and Stochastic Decoding Faulty Stochastic Decoder Monte-Carlo Simulation Conclusion
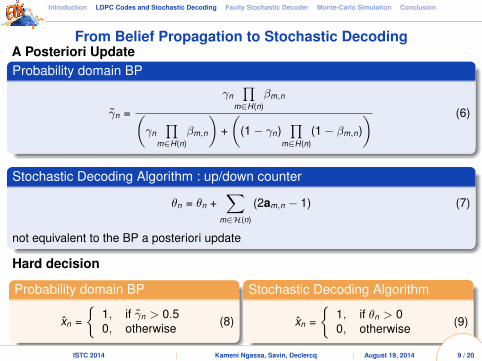
From Belief Propagation to Stochastic DecodingA Posteriori UpdateProbability domain BP
γ̃n =
γn∏
m∈H(n)βm,n(
γn∏
m∈H(n)βm,n
)+(
(1− γn)∏
m∈H(n)(1− βm,n)
) (6)
Stochastic Decoding Algorithm : up/down counter
θn = θn +∑
m∈H(n)
(2am,n − 1) (7)
not equivalent to the BP a posteriori update
Hard decision
Probability domain BP
x̂n ={
1, if γ̃n > 0.50, otherwise (8)
Stochastic Decoding Algorithm
x̂n ={
1, if θn > 00, otherwise (9)
ISTC 2014 | Kameni Ngassa, Savin, Declercq | August 19, 2014 9 / 20

Introduction LDPC Codes and Stochastic Decoding Faulty Stochastic Decoder Monte-Carlo Simulation Conclusion
Improving the Stochastic Decoder Performance
Latching Problemcycles in the graph −→ correlation in stochastic streams
a(`)m,n = a(`−1)
m,n −→ hold state and low level of switching activity
Consequence : groups of nodes locked into fixed states which prevents proper decodingand leads to poor performance.
Noise-Dependent ScalingGoal : ensure similar switching activity for different channel noise levelAchieved by replacing ε by a constant µ [Huang’13] as follows.
Pr(cn = 1) ={
1− ε, if yn = 1ε, if yn = 0 −→ Pr(cn = 1) =
{1− µ, if yn = 1µ, if yn = 0 (10)
Edge-MemoriesGoal :decorrelate bits in stochastic streams
S-bit shift register assigned to one edge of the decoder
ISTC 2014 | Kameni Ngassa, Savin, Declercq | August 19, 2014 10 / 20

Introduction LDPC Codes and Stochastic Decoding Faulty Stochastic Decoder Monte-Carlo Simulation Conclusion
Improving the Stochastic Decoder Performance
bm1,nbm2,nbm(dv−1),ncn
amdv ,n
in
addressi
update
out 0
1
E.M.
FIGURE: Variable node of stochastic decoder with edge-memories
VN Processing with Edge-Memories
At cycle `, for ∀ n ∈ {1, . . . ,N} and m ∈ H(n) if ∀m′ ∈ H(n)\m, b(`)m′,n = cn
a(`)m,n = cn
cn → EM(the new value of am,n is stored in the memory)
otherwise, a(`)m,n = EM(i) (a bit is randomly chosen from the memory)
i = random position in the edge-memory.
ISTC 2014 | Kameni Ngassa, Savin, Declercq | August 19, 2014 11 / 20

Introduction LDPC Codes and Stochastic Decoding Faulty Stochastic Decoder Monte-Carlo Simulation Conclusion
Faulty Stochastic Decoder (1)
Stochastic Decoders with Noisy Edge-MemoriesEM(i) = bit read at address i from the noiseless EM
EMpr(i) = bit read at address i from the noisy EM
EMpr(i) ={
EM(i), with probability 1− pem
EM(i), with probability pem(11)
VN Processing with Edge-Memories
At cycle `, for ∀ n ∈ {1, . . . ,N} and m ∈ H(n) if ∀m′ ∈ H(n)\m, b(`)m′,n = cn
a(`)m,n = cn
cn → EM(the new value of am,n is stored in the memory with no error)
otherwise, a(`)m,n = EMpr(i) (a bit is randomly chosen from the faulty memory)
i = random position in the edge-memory.
ISTC 2014 | Kameni Ngassa, Savin, Declercq | August 19, 2014 12 / 20

Introduction LDPC Codes and Stochastic Decoding Faulty Stochastic Decoder Monte-Carlo Simulation Conclusion
Faulty Stochastic Decoder (2)
Full Noisy Stochastic DecoderOutput of the Noisy Stochastic Stream Generator :
πpr(p) ={
π(p), with probability 1− pτπ(p), with probability pτ
πpr(pn) behaves like the noiseless π(p(1− pτ ) + (1− p)pτ ).
Output of the Noisy Check Node Processing :
Cpr ={
C, with probability 1− pc
C, with probability pc
Output of the Noisy Variable Node Processing :
Vpr ={
V, with probability 1− pv
V, with probability pv
ISTC 2014 | Kameni Ngassa, Savin, Declercq | August 19, 2014 13 / 20

Introduction LDPC Codes and Stochastic Decoding Faulty Stochastic Decoder Monte-Carlo Simulation Conclusion
Robustness Assessment of Noisy Stochastic Decoders
No density evolution analysisbecause variable-to-check node messages are computed as functions of dependentrandom variables.
a(`)m,n is a function of cn, (b(`)
m′,n)m′∈H(n)\m, and a(`−1)m,n
but (b(`)m′,n)m′∈H(n)\m and a(`−1)
m,n are dependent.
Monte-Carlo Simulation(3, 6)-regular LDPC code with length N = 1008 bits
channel input probabilities are quantized on q = 8 bits,
the noise dependent scale factor is µ = 0.12,
all decoders use 48-bit edge-memories,
the maximum number of decoding cycles is set to 1000.
For comparison : floating-point BP decoding with maximum number of iterationsequals to 100
ISTC 2014 | Kameni Ngassa, Savin, Declercq | August 19, 2014 14 / 20

Introduction LDPC Codes and Stochastic Decoding Faulty Stochastic Decoder Monte-Carlo Simulation Conclusion
Numerical Results for the Noisy EM Stochastic Decoder
0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.110
−7
10−6
10−5
10−4
10−3
10−2
10−1
100
BSC error probability p0
Bit
Err
or R
ates
float−point BPnoiseless STOnoisy STO p
em = 0.0001
noisy STO pem
= 0.005
noisy STO pem
= 0.01
noisy STO pem
= 0.02
noisy STO pem
= 0.05
FIGURE: BER performance of the stochastic decoder with noisy edge-memories
ISTC 2014 | Kameni Ngassa, Savin, Declercq | August 19, 2014 15 / 20

Introduction LDPC Codes and Stochastic Decoding Faulty Stochastic Decoder Monte-Carlo Simulation Conclusion
Numerical Results for the Full Noisy Stochastic Decoder
0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.110
−7
10−6
10−5
10−4
10−3
10−2
10−1
100
BSC error probability p0
Bit
Err
or R
ates
float−point BPnoiseless STOnoisy STO pτ = 0.01
noisy STO pc = 0.01
noisy STO pv = 0.01
noisy STO pτ =pc = p
v = 0.01
FIGURE: BER performance of the full noisy stochastic decoder
ISTC 2014 | Kameni Ngassa, Savin, Declercq | August 19, 2014 16 / 20
Introduction LDPC Codes and Stochastic Decoding Faulty Stochastic Decoder Monte-Carlo Simulation Conclusion
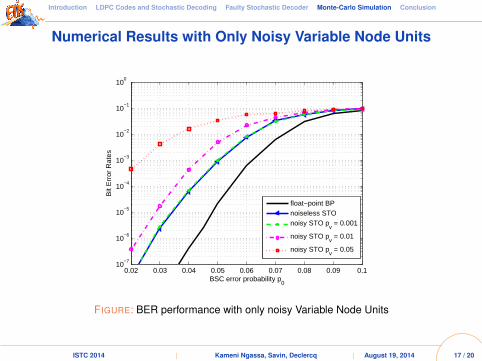
Numerical Results with Only Noisy Variable Node Units
0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.110
−7
10−6
10−5
10−4
10−3
10−2
10−1
100
BSC error probability p0
Bit
Err
or R
ates
float−point BPnoiseless STOnoisy STO p
v = 0.001
noisy STO pv = 0.01
noisy STO pv = 0.05
FIGURE: BER performance with only noisy Variable Node Units
ISTC 2014 | Kameni Ngassa, Savin, Declercq | August 19, 2014 17 / 20

Introduction LDPC Codes and Stochastic Decoding Faulty Stochastic Decoder Monte-Carlo Simulation Conclusion
Conclusion and Perspectives
ConclusionWe investigated of faulty Stochastic decoders
Two error models introducedStochastic decoders managed to operate with high level of errors due to differentcomponents
Edge-Memories can be unreliableResults can be used to reduce the energy consumption of Edge-Memories throughvoltage scaling
PerspectivesInvestigate faulty stochastic decoders with technology dependent error modelsunder aggressive voltage scaling
Study other noisy re-randomization units (besides edge-memories)
ISTC 2014 | Kameni Ngassa, Savin, Declercq | August 19, 2014 18 / 20

Introduction LDPC Codes and Stochastic Decoding Faulty Stochastic Decoder Monte-Carlo Simulation Conclusion
References
K.-L. Huang, V. Gaudet, and M. Salehi, “A scaling method for stochastic ldpcdecoding over the binary symmetric channel,” in Information Sciences and Systems(CISS), 47th Annual Conference on, 2013.
C. L. Kameni Ngassa, V. Savin, and D. Declercq, “Min-sum-based decoders runningon noisy hardware,” in proc. of IEEE Global Communications Conference(GLOBECOM), 2013.
I. Perez-Andrade, X. Zuo, R. Maunder, B. Al-Hashimi, and L. Hanzo, “Analysis ofvoltage- and clock-scaling-induced timing errors in stochastic ldpc decoders,” inWireless Communications and Networking Conference (WCNC), 2013 IEEE, April2013, pp. 4293–4298.
S. Sharifi Tehrani, S. Mannor, and W. J. Gross, “Fully parallel stochastic LDPCdecoders,” IEEE Trans. on Signal Processing, vol. 56, no. 11, pp. 5692–5703, 2008.
L. R. Varshney, “Performance of LDPC codes under faulty iterative decoding,” IEEETrans. Inf. Theory, vol. 57, no. 7, pp. 4427–4444, 2011.
S. Yazdi, H. Cho, and L. Dolecek, “Gallager b decoder on noisy hardware,” IEEETrans. on Comm., vol. 66, no. 5, pp. 1660–1673, 2013.
ISTC 2014 | Kameni Ngassa, Savin, Declercq | August 19, 2014 19 / 20

Introduction LDPC Codes and Stochastic Decoding Faulty Stochastic Decoder Monte-Carlo Simulation Conclusion
Thank You for Your Attention !
ISTC 2014 | Kameni Ngassa, Savin, Declercq | August 19, 2014 20 / 20





























