Embed Size (px)
Citation preview

元培科技大學 資訊工程系
專題結案報告
多 功 能 自 走 車 之 研 究
The study of multi-function car
姓名〆 劉偉杰
劉君威
劉景雯
湯軒維
呂俊奇
許聚良
指導教授〆 王德順 教授
中 華 民 國 100 年 12 月
多 功 能 自 走 車 之 研 究
The study of multi-function car
學 生〆 劉偉杰 0972412022 Student〆LIU WEI-JIE
學 生〆 湯軒維 0972412021 Student〆TANG SYUANndashWEI
學 生〆 呂俊奇 0972412008 Student〆 LU JUNndashQI
學 生〆 劉景雯 0972412026 Student〆LIU JINGndashWEN
學 生〆 劉君威 0972412039 Student〆LIU JUNndashWEI
學 生〆 許聚良 0972412015 Student〆XU JUndashLIANG
指導教授〆 王德順 Advisor〆Dr Wang TendashShun
元 培 科 技 大 學
資 訊 工 程 系
專 題 結 案 報 告 A Thesis
Submitted to Department of Computer Science and Information Engineering
College of Biomedical Science and Technology
Yuanpei University
in partial Fulfillment of the Requirements
for the Degree of
Bachelor
in
Computer Science and Information Engineering
December 2011
Hsinchu Taiwan Republic of China
中華民國 100 年 12 月
I
多功能自走車
學生〆劉偉杰 劉君威
劉景雯 湯軒維
呂俊奇 許聚良
指導教授〆 王德順 教授
元培科技大學資訊工程系學士班專題
摘 要
標題多功能自走車
本專題研究的自走車是一項整合電子電機機械等方面知識的機電整合
車一台完整的自走車涵括電源電路感測電路馬達電路和中央控制電路
等四大電路部分配合電池車身步進馬達和車輪等硬體以及作為邏輯判斷
的程式流程軟體因此在製作自走車時可說是涉及了多方面的知識領域其中
自走的核心我們選擇了 BASIC Stampreg 2 晶片模組因為它的硬體架構及周
邊設備完整指令集功能強大加上組裝容易等種種優勢正符合我們的需求
且利用副程式的應用使程式能夠如實際面臨的關卡而做出適當的判斷並更
容易閱讀及進行修改本專題是藉由感測器-光敏電阻偵測黑色膠帶的反射訊
號經由傳輸至 BASIC Stampreg 2 晶片模組由程式進行邏輯判斷後對馬達
電路下指令做前進左右轉等動作而我們在車體上也增加了紅外線的功能
在沒有黑色膠帶的迷宮中能夠與觸鬚相互搭配並順利的通過
II
The study of multi-function car
Students〆 Liu WeindashJie
Liu JunndashWei
Liu JingndashWen
Xu JundashLiang
Lu JunndashQi
Tang SyuanndashWei
Advisor〆Dr Wang TendashShun
Department of Computer Science and Information Engineering
Yuanpei University
ABSTRACT
This project develops an intelligent car with auto running in a maze and
tracing in a line The system integrates mechanics and electronics including power
supply circuits sensor circuits server motor control circuits and main control circuits
The hardware structure consists of four parts with batteries server motors wheels
and a BASIC Stampreg control board We chose BASIC Stampreg module because its
hardware architectures peripherals and integrated developed environments are
complete including powerful instruction sets and easy assembly The intelligent car
can trace in a line because of using two photosensitive resistance sensors to
distinguish the black tape areas and white areas A pair of whiskers and two infrared
sensors is applied in running in a maze This system will collect much useful
information if we installed a few different sensors and a webcam on the car
III
致 謝 首先謝謝我們的指導老師王德順主任不辭辛勞的給予我們機械方面
的認知和研究過程的建議因為組員們沒有這方面的知識王德順主任
總是細心的講解和分析並提供我們研究專題中所需的資源且常常陪著
我們討論專題而留到很晚雖然時常出差錯但主任總是用他的包容心
包容我們在此整組專題人員向您致謝
也謝謝各位評審老師給予的建議和修改方案您們的建議我們會銘
記在心並加以改善
感謝整組組員們的協助和配合在百忙中抽空蒐集資料和準時到達
集合地點從來沒有任何怨言一心只為專題著想想把最好的呈現給
大家看沒有大家的努力和毅力相信不會有這份專題報告
專題小組成員
100年 12 月於元培資工
元培科技大學資訊工程系 專題報告多功能自走車
IV
目 錄
中文提要 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip I
英文提要 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip II
致謝 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip III
目錄 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip IV
圖目錄 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip V
一 緒論helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 1
11 研究動機helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 1
12 研究目的helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 1
13 文獻探討helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 2
二 研究內容與方法helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
21 安裝軟體程序helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
22 研究內容helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 14
23 研究方法helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 14
24 研究步驟helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 15
三 理論helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 16
31 觸鬚簡介helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 16
32 紅外線簡介helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 18
33 光敏電阻簡介helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 21
四 研究成果helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
41 系統整合和測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
42 最後組合三大功能helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 38
五 結論helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 45
參考文獻 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 46
附錄一 觸鬚迷宮測試程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 47
附錄二 紅外線迷宮測試程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 49
附錄三 完成測試程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 51
附錄四 工作分配表helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 59
自傳 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 67
心得 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 73
元培科技大學資訊工程系 專題報告多功能自走車
V
圖目錄 圖 2-1 軟體安裝程序(1)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
圖 2-11 軟體安裝程序(2)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
圖 2-12 軟體安裝程序(3)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 4
圖 2-13 軟體安裝程序(4)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 4
圖 2-14 軟體安裝程序(5)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 5
圖 2-15 軟體安裝程序(6)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 5
圖 2-16 軟體安裝程序(7)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 6
圖 2-17 軟體安裝程序(8)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 6
圖 2-18 軟體安裝程序(9)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 7
圖 2-2 電腦和車體連接圖 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 7
圖 2-3 Board of Education 所需的硬體 helliphelliphelliphelliphelliphelliphelliphelliphelliphellip 8
圖 2-4 橡膠腳墊(左)貼在 BOE的背面(右)helliphelliphelliphelliphelliphelliphelliphelliphelliphellip 8
圖 2-5 校正馬達程式圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 9
圖 2-6 時序圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 9
圖 2-7 調整伺服機helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 10
圖 2-8 BB CAR控制方塊圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 11
圖 2-9 麵包板介紹helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 11
圖 2-10 觸鬚零件helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 12
圖 2-11 觸鬚組裝圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 12
圖 2-12 紅外線元件helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 13
圖 3-1 觸鬚電路圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 16
圖 3-2 觸鬚流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 17
圖 3-3 使用 IR頭燈偵測物件 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 19
圖 3-4 紅外線電路helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 19
圖 3-5 紅外線流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 20
圖 3-6 光敏電阻零件helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 21
圖 3-7 電壓分配圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 22
圖 3-8 光敏電阻電路圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 23
圖 3-9 光敏電阻流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 24
圖 4-1 觸鬚完成圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
圖 4-2 觸鬚排針圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
圖 4-3 觸鬚左右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 27
圖 4-4 觸鬚左邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 27
圖 4-5 觸鬚右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 28
圖 4-6 觸鬚兩邊擠壓測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 28
元培科技大學資訊工程系 專題報告多功能自走車
VI
圖 4-7 紅外線左右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 30
圖 4-8 紅外線右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 30
圖 4-9 紅外線左邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 31
圖 4-10 RC電路與 IO端連接helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 32
圖 4-11 光敏電阻右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 34
圖 4-12 光敏電阻左邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 35
圖 4-13 光敏電阻兩邊在黑色上測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 36
圖 4-14 光敏電阻兩邊在白色上測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 37
圖 4-15 結果流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 38
圖 4-16 完成圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 39
圖 4-17 觸鬚右邊測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 40
圖 4-18 觸鬚左邊測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 40
圖 4-19 紅外線左右測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 41
圖 4-20 紅外線 90deg轉測試圖 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 41
圖 4-21 紅外線左右測試圖 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 42
圖 4-22 紅外線 90deg轉測試 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 42
圖 4-23 光敏電阻左邊偵測到白色測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 43
圖 4-24 光敏電阻右邊偵測到白色測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 43
圖 4-25 光敏電阻兩邊偵測到黑色測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 44
1
一緒論
11 研究動機〆
機器人已被使用於自動控制 醫學工業或是各式樣式的交通
工具當然也出現於科幻影集中Robot 這個字第一次出現是在捷克
科幻作家凱皮克在1920 年出版的科幻小說lt羅桑的萬用機器人gt在這
個小說裡面機器人被描述得非常類似人類從這點出發許多科幻
故事都加入了機器人試著融入人類社會並且產生人類的情感的橋
段不過當General Motors 於1961 年在工廠安裝了他們的第一台
機器人的時卻有了改變這些自動的機器表現出與科幻中的人類外型
機器人完全不同的形象機器人的組裝與控制是由機械電子和問題
的處理所組合而成的之後你將會從這本書中的步驟和專題中學到現
實生活中機器人控制的應用而唯一的差別只有在大小和精密程度
而已之後會使用到的機械原理範例程式和電路會與工程師開發的
工業用品相似有時候也會完全一樣
在現今科技發達強調自動控制的社會上許多事物已經由自動
化的機械代替無人自走車即為現今自動化科技下的產物由於近年
來造成轟動的人體機器人引貣了我們的興趣
12 研究目的〆
自走車研究的目的是為了邁入自動化產業的同時得以延續對於
工業科技術進步的研發與探索一般大眾一直常誤以為自走車只是一
個電腦玩具事實上自走車是一種特殊的電腦系統現今社會上大力
的提倡自動化所用到的機器幾乎都與電腦連成一體所謂自走車就
是自己設計的機器因此自走車也可說是一部小型的機器人
常看到的新聞報導發現交通事故每天都會發生釀成車禍的原因
就是開車時踩錯油門使車子暴衝或者是開車過度疲勞睡著要不然就是
開快車來不及煞車就造成交通意外所以我們在想如果把我們能研發
出在突發狀況發生的時候人來不及反應汽車就能做出保護駕駛人的措
施反應這樣是否就能降低發生交通意外的事呢〇
所以我們就想該如何使無生命的機械依照我們的指示去執行擬訂
的目標首先必頇讓無人自走車以電路板馬達電池和輪軸之間的
協定使得它能前進後退甚至轉彎
2
13 文獻探討〆
無人自走車的研究領域除了國外國內也有許多單位著手研究更
新型或是功能更強大的自走車乃至於機器人的研發對自走車而言
許多研究者不外乎都是用超音波做障礙物的感測由此可知其實用性
但我們想嘗試用類似的方式去感測障礙物所以我們想從紅外線
著手將其功能裝載至自走車上並利用光敏電阻判斷黑白地面使
其發展為更強大的無人自走車
3
二研究內容與方法 我們在研究自走車前會先安裝車體和調整步進馬達再做安裝程
式到個人電腦軟體安裝步驟如下〆
21軟體安裝程序〆
Parallax光碟安裝程序
圖 2-1 軟體安裝程序(1)
圖 2-11 軟體安裝程序(2)
點選圖BASIC Stamp 資料夾旁邊顯示的+
點選Windows 資料夾旁的+
點選有寫著ldquoStamp 22e2sx2p2pe (stampwexe)rdquo的磁片圖像
4
圖 2-12 軟體安裝程序(3)
當BASIC Stamp Editor 安裝精靈開啟時按下Next 按鈕
圖 2-13 軟體安裝程序(4)
選擇Typical 進行安裝
按下Next
5
圖 2-14軟體安裝程序(5)
當安裝精靈問你ldquo是否安裝程式rdquo時按下Install 按鍵
圖 2-15軟體安裝程序(6)
當安裝精靈顯示ldquo安裝完成rdquo時按下Finish 按鈕
現在你的BASIC Stamp 已經安裝完畢了
軟體方面可重網路下載可參考wwwparallaxcom道網站內按下載選
單以顯示選項按下BASIC StampSoftware 連結
6
圖 2-16軟體安裝程序(7)
當你到了BASIC Stamp Software 頁面時請下載最新的20 或更新
的版本
在ldquoBASIC Stamp Windows Editor version 20 Beta 1 (6MB)rdquo的
右邊
圖 2-17軟體安裝程序(8)
7
圖 2-18軟體安裝程序(9)
當下載視窗如上圖 出現時選擇另存檔案
按下ok 鈕
電腦串列纜線的架設
Board of Education 或是BASIC Stamp HomeWork Board 必頇藉由串
列纜線或是USB轉串列轉換器與電腦連接
使用 BASIC Stamp Editor軟體和 Boe-Bot硬體〆
畢竟這方面的實作由於我們整組都為第一次所以想找解說教為
清楚的書籍方面著手剛好從我們指導王老師那得知學校剛好有這部
分的書籍和硬體因而向學校借閱做為我們專題研究的主軸內容也
有提到本組貣初所設定的構想我們將列為參考
BASIC Stamp
和電腦之間傳送訊息的方式
如右圖
圖 2-2電腦和車體連接圖
8
設定硬體並檢測系統
BASIC Stamp 需要連接電源及電腦才能寫入程式當接上電源及
電腦後你就可以使用BASIC Stamp Editor進行測試這個步驟會教
你如何進行測試
首先要準備 Board of Education(BOE)所需的硬體如下
圖2-3 Board of Education所需的硬體
連接硬體
BOE 或是BASIC Stamp HomeWorkBoard 都有像是圖4-3 的橡膠腳
墊而且它們會被黏在在板子朝下的那一側BOE 會有圓圈標示在黏
橡膠腳墊的地方把橡膠腳墊取出並黏在板子朝下的那一側
圖2-4 橡膠腳墊(左)貼在BOE 的背面(右)
9
啟動馬達和校正
剛買來的馬達因為在工廠沒有事先調整過因此接收到停止的
指令時並不會停止運轉所以我們必頇先從馬達著手這樣車體在行
徑間才不會有所偏差
這時候必頇進行 BASIC Stamp 與電腦之間的程式編輯了
此為程式碼和操作介面
圖 2-5 校正馬達程式圖
下圖為 P12 端伺服機的序號經過解析的時序圖我們稱之為中心
訊號這訊號是以兩兩 15 毫秒(ms)的脈衝之間有 20 毫秒的暫停時
間以一定的周期持續下去
圖 2-6 時序圖
10
Duration 參數只要乘上2 微秒﹝2μs = 0000002 秒﹞就是所
送出脈衝持續的時間因此可以藉此關係來計算出對應的Duration 參
數々只要將你想要的脈衝時間長度除以2μs 便是你要輸入的Duration
數
只要你的伺服機以螺絲貣子適當的調整後當它接收到這個訊號時
便會保持停止
將螺絲貣子的尖端插進伺服機外部的小孔以調整電位計
圖2-7 調整伺服機
輕輕的旋轉你的螺絲貣子來調整電位計
兩個伺服馬達都得做校正的動作喲P12接做完之後接著換P13程
式碼的部分頇改成 PULSOUT 13 750因為另一個馬達是接在P13這
隻腳上
11
感測元件 馬達控制電路板
直流電源(電池盒或USB電源)
圖 2-8 BB CAR 控制方塊圖
以下試麵包板的介紹框貣來部份 P0~P15是 PIN腳Vdd電源Vss
接地
圖 2-9 麵包板介紹
12
零件清單〆
1 Whisker 鐵絲
2 78吋的 4-40Phillips平頭螺絲
3 12吋圓形墊片
4 四號尼龍墊圈
5 3PIN排針
6 電阻 220Ω
(紅-紅-棕)
7 電阻 10Ω
(棕-黑-橙)
以下是 Whisker的硬體配件如圖 2-10
圖 2-10 觸鬚零件
接著組裝 Whisker如圖 2-11
圖 2-11 觸鬚組裝圖
13
零件清單〆
1 紅外線感測器
2 IR LED(透明外殼)
3 IR LED組裝外殼
4 220Ω電阻(紅-紅-棕)
5 1Ω電阻(棕-黑-紅)
以下是 IR(發射感測)硬體配件如圖 2-12
圖 2-12 紅外線元件
14
22研究內容
本專題的實驗有三個功能實驗功能有觸鬚紅外線和光敏電阻
觸鬚的功能是說當碰到障礙物時它會先後退在左右轉之後繼續前進
紅外線的功能是說左右邊有障礙物時他會執行前進當左右邊無障
礙物時他會左右轉之後再前進光敏電阻是在說設計一個路線再做循
跡動作
23研究方法
校正伺服機〆
本硬體在使用前要先做一個校正的動作避免後續行走過程或轉
彎時有誤差所以我們要寫一個停止的程式來給伺服馬達但因為出
廠沒有做過校正因此剛買的伺服機收到這個訊號時並不會保持停
止所以你需要以螺絲貣子調整伺服機這樣一來當它收到這個訊號
時就會保持停止這叫做伺服機的校正在經過調整後測試一下伺
服機功能是否正常々測試的程式將會傳送訊號給伺服機要求它以各
種不同的轉速進行順時針或是逆時針旋轉
觸鬚式導航〆
本硬體電路架構以通路和斷路來判斷當觸鬚觸碰到 3PIN排針形
成短路這時觀察車體是否有依照寫入的程式碼作出適當的反應
IR紅外線感測〆
IR 物件偵測系統會安裝在Boe-Bot左右兩邊上IR燈的紅外光從
障礙反射回來例如〆就像是你的眼睛偵測到障礙物反射的光然後
讓你的大腦處理這個訊號並根據這些資料指揮身體移動
光敏電阻感應〆
本硬體利用光在黑白兩色上反射亮度不一樣的原理讓車體本身
能夠在所給予的反射數值且其數值在一定的區間內依循著軌跡前進
15
24研究步驟
1參考書籍並上網 Download軟體
2將馬達組裝好後利用 BASIC Stamp Editor 軟體將停止的程式碼
寫入 BOE中並用小螺絲貣子做微調
3將觸鬚元件電阻和電線依照電路圖組裝於車體前方與麵包板
上
4利用 BASIC Stamp Editor 軟體驗證觸鬚元件是否裝載有誤並用
程式測試左右觸鬚能否因碰觸到障礙物形成短路
5寫入程式碼並讓車體碰撞到障礙物後能夠做出適當的判斷且順
利前進以 BASIC Stamp Editor 軟體寫入程式碼並且在實測中
找出最適當的參數而讓車體能在行走過程中更為穩健
6將紅外線各接腳電阻和電線依電路圖插入麵包板
7利用 BASIC Stamp Editor 測試紅外線發射及接收裝置有無如預
期運作如果有將手掌擋住發射器前方並看看接收的數值是否
有所改變
8測試前方若有障礙物能不依靠觸鬚感測而讓車體能往無障礙物
方向前進
9我們將 LED和光敏電阻套入黑色吸管中並固定於車體前的延伸板
下方利用電線延伸上來和電阻插入所對應的麵包板中
10利用上述得到的數值寫入程式內讓車體能沿著黑色膠帶所規劃
的路徑前進
11利用軟體寫入測試程式觀察 LED有無亮貣並紀錄光電阻在黑色膠
帶與白色木板上的數值變化
16
三理論 31 觸鬚簡介
首先我們必頇了解到觸鬚是如何感測並判斷該如何下達指令
其實很簡單如圖3-1此為觸鬚和車體間的電路圖
圖 3-1 觸鬚電路圖
觸鬚本身是車體的延伸也是電路的開關Vss為接地的部分(平時
為斷路)當電源啟動觸鬚任何一邊碰觸到障礙物時則 IO 線路會
因為觸鬚擠壓而成為短路(因為電被傳至地面)此時該條電路為 0V
當PBASIC程式開始時IO端的預設值均為輸入端則連接觸鬚的
IO端功能都是輸入端舉例來說如果電壓為3V時和觸鬚連接的IO
端會使程式解讀成 1 (觸鬚未被擠壓)若為 0V時則解讀為 0 (觸
鬚被擠壓)
觸鬚靈敏度的所在於3PIN排針與鐵絲的距離當鐵絲安裝在車體
的位置越靠近排針時反應越靈敏
17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

多 功 能 自 走 車 之 研 究
The study of multi-function car
學 生〆 劉偉杰 0972412022 Student〆LIU WEI-JIE
學 生〆 湯軒維 0972412021 Student〆TANG SYUANndashWEI
學 生〆 呂俊奇 0972412008 Student〆 LU JUNndashQI
學 生〆 劉景雯 0972412026 Student〆LIU JINGndashWEN
學 生〆 劉君威 0972412039 Student〆LIU JUNndashWEI
學 生〆 許聚良 0972412015 Student〆XU JUndashLIANG
指導教授〆 王德順 Advisor〆Dr Wang TendashShun
元 培 科 技 大 學
資 訊 工 程 系
專 題 結 案 報 告 A Thesis
Submitted to Department of Computer Science and Information Engineering
College of Biomedical Science and Technology
Yuanpei University
in partial Fulfillment of the Requirements
for the Degree of
Bachelor
in
Computer Science and Information Engineering
December 2011
Hsinchu Taiwan Republic of China
中華民國 100 年 12 月
I
多功能自走車
學生〆劉偉杰 劉君威
劉景雯 湯軒維
呂俊奇 許聚良
指導教授〆 王德順 教授
元培科技大學資訊工程系學士班專題
摘 要
標題多功能自走車
本專題研究的自走車是一項整合電子電機機械等方面知識的機電整合
車一台完整的自走車涵括電源電路感測電路馬達電路和中央控制電路
等四大電路部分配合電池車身步進馬達和車輪等硬體以及作為邏輯判斷
的程式流程軟體因此在製作自走車時可說是涉及了多方面的知識領域其中
自走的核心我們選擇了 BASIC Stampreg 2 晶片模組因為它的硬體架構及周
邊設備完整指令集功能強大加上組裝容易等種種優勢正符合我們的需求
且利用副程式的應用使程式能夠如實際面臨的關卡而做出適當的判斷並更
容易閱讀及進行修改本專題是藉由感測器-光敏電阻偵測黑色膠帶的反射訊
號經由傳輸至 BASIC Stampreg 2 晶片模組由程式進行邏輯判斷後對馬達
電路下指令做前進左右轉等動作而我們在車體上也增加了紅外線的功能
在沒有黑色膠帶的迷宮中能夠與觸鬚相互搭配並順利的通過
II
The study of multi-function car
Students〆 Liu WeindashJie
Liu JunndashWei
Liu JingndashWen
Xu JundashLiang
Lu JunndashQi
Tang SyuanndashWei
Advisor〆Dr Wang TendashShun
Department of Computer Science and Information Engineering
Yuanpei University
ABSTRACT
This project develops an intelligent car with auto running in a maze and
tracing in a line The system integrates mechanics and electronics including power
supply circuits sensor circuits server motor control circuits and main control circuits
The hardware structure consists of four parts with batteries server motors wheels
and a BASIC Stampreg control board We chose BASIC Stampreg module because its
hardware architectures peripherals and integrated developed environments are
complete including powerful instruction sets and easy assembly The intelligent car
can trace in a line because of using two photosensitive resistance sensors to
distinguish the black tape areas and white areas A pair of whiskers and two infrared
sensors is applied in running in a maze This system will collect much useful
information if we installed a few different sensors and a webcam on the car
III
致 謝 首先謝謝我們的指導老師王德順主任不辭辛勞的給予我們機械方面
的認知和研究過程的建議因為組員們沒有這方面的知識王德順主任
總是細心的講解和分析並提供我們研究專題中所需的資源且常常陪著
我們討論專題而留到很晚雖然時常出差錯但主任總是用他的包容心
包容我們在此整組專題人員向您致謝
也謝謝各位評審老師給予的建議和修改方案您們的建議我們會銘
記在心並加以改善
感謝整組組員們的協助和配合在百忙中抽空蒐集資料和準時到達
集合地點從來沒有任何怨言一心只為專題著想想把最好的呈現給
大家看沒有大家的努力和毅力相信不會有這份專題報告
專題小組成員
100年 12 月於元培資工
元培科技大學資訊工程系 專題報告多功能自走車
IV
目 錄
中文提要 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip I
英文提要 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip II
致謝 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip III
目錄 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip IV
圖目錄 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip V
一 緒論helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 1
11 研究動機helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 1
12 研究目的helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 1
13 文獻探討helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 2
二 研究內容與方法helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
21 安裝軟體程序helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
22 研究內容helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 14
23 研究方法helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 14
24 研究步驟helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 15
三 理論helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 16
31 觸鬚簡介helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 16
32 紅外線簡介helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 18
33 光敏電阻簡介helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 21
四 研究成果helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
41 系統整合和測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
42 最後組合三大功能helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 38
五 結論helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 45
參考文獻 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 46
附錄一 觸鬚迷宮測試程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 47
附錄二 紅外線迷宮測試程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 49
附錄三 完成測試程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 51
附錄四 工作分配表helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 59
自傳 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 67
心得 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 73
元培科技大學資訊工程系 專題報告多功能自走車
V
圖目錄 圖 2-1 軟體安裝程序(1)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
圖 2-11 軟體安裝程序(2)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
圖 2-12 軟體安裝程序(3)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 4
圖 2-13 軟體安裝程序(4)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 4
圖 2-14 軟體安裝程序(5)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 5
圖 2-15 軟體安裝程序(6)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 5
圖 2-16 軟體安裝程序(7)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 6
圖 2-17 軟體安裝程序(8)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 6
圖 2-18 軟體安裝程序(9)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 7
圖 2-2 電腦和車體連接圖 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 7
圖 2-3 Board of Education 所需的硬體 helliphelliphelliphelliphelliphelliphelliphelliphelliphellip 8
圖 2-4 橡膠腳墊(左)貼在 BOE的背面(右)helliphelliphelliphelliphelliphelliphelliphelliphelliphellip 8
圖 2-5 校正馬達程式圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 9
圖 2-6 時序圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 9
圖 2-7 調整伺服機helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 10
圖 2-8 BB CAR控制方塊圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 11
圖 2-9 麵包板介紹helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 11
圖 2-10 觸鬚零件helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 12
圖 2-11 觸鬚組裝圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 12
圖 2-12 紅外線元件helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 13
圖 3-1 觸鬚電路圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 16
圖 3-2 觸鬚流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 17
圖 3-3 使用 IR頭燈偵測物件 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 19
圖 3-4 紅外線電路helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 19
圖 3-5 紅外線流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 20
圖 3-6 光敏電阻零件helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 21
圖 3-7 電壓分配圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 22
圖 3-8 光敏電阻電路圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 23
圖 3-9 光敏電阻流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 24
圖 4-1 觸鬚完成圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
圖 4-2 觸鬚排針圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
圖 4-3 觸鬚左右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 27
圖 4-4 觸鬚左邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 27
圖 4-5 觸鬚右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 28
圖 4-6 觸鬚兩邊擠壓測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 28
元培科技大學資訊工程系 專題報告多功能自走車
VI
圖 4-7 紅外線左右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 30
圖 4-8 紅外線右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 30
圖 4-9 紅外線左邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 31
圖 4-10 RC電路與 IO端連接helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 32
圖 4-11 光敏電阻右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 34
圖 4-12 光敏電阻左邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 35
圖 4-13 光敏電阻兩邊在黑色上測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 36
圖 4-14 光敏電阻兩邊在白色上測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 37
圖 4-15 結果流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 38
圖 4-16 完成圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 39
圖 4-17 觸鬚右邊測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 40
圖 4-18 觸鬚左邊測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 40
圖 4-19 紅外線左右測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 41
圖 4-20 紅外線 90deg轉測試圖 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 41
圖 4-21 紅外線左右測試圖 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 42
圖 4-22 紅外線 90deg轉測試 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 42
圖 4-23 光敏電阻左邊偵測到白色測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 43
圖 4-24 光敏電阻右邊偵測到白色測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 43
圖 4-25 光敏電阻兩邊偵測到黑色測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 44
1
一緒論
11 研究動機〆
機器人已被使用於自動控制 醫學工業或是各式樣式的交通
工具當然也出現於科幻影集中Robot 這個字第一次出現是在捷克
科幻作家凱皮克在1920 年出版的科幻小說lt羅桑的萬用機器人gt在這
個小說裡面機器人被描述得非常類似人類從這點出發許多科幻
故事都加入了機器人試著融入人類社會並且產生人類的情感的橋
段不過當General Motors 於1961 年在工廠安裝了他們的第一台
機器人的時卻有了改變這些自動的機器表現出與科幻中的人類外型
機器人完全不同的形象機器人的組裝與控制是由機械電子和問題
的處理所組合而成的之後你將會從這本書中的步驟和專題中學到現
實生活中機器人控制的應用而唯一的差別只有在大小和精密程度
而已之後會使用到的機械原理範例程式和電路會與工程師開發的
工業用品相似有時候也會完全一樣
在現今科技發達強調自動控制的社會上許多事物已經由自動
化的機械代替無人自走車即為現今自動化科技下的產物由於近年
來造成轟動的人體機器人引貣了我們的興趣
12 研究目的〆
自走車研究的目的是為了邁入自動化產業的同時得以延續對於
工業科技術進步的研發與探索一般大眾一直常誤以為自走車只是一
個電腦玩具事實上自走車是一種特殊的電腦系統現今社會上大力
的提倡自動化所用到的機器幾乎都與電腦連成一體所謂自走車就
是自己設計的機器因此自走車也可說是一部小型的機器人
常看到的新聞報導發現交通事故每天都會發生釀成車禍的原因
就是開車時踩錯油門使車子暴衝或者是開車過度疲勞睡著要不然就是
開快車來不及煞車就造成交通意外所以我們在想如果把我們能研發
出在突發狀況發生的時候人來不及反應汽車就能做出保護駕駛人的措
施反應這樣是否就能降低發生交通意外的事呢〇
所以我們就想該如何使無生命的機械依照我們的指示去執行擬訂
的目標首先必頇讓無人自走車以電路板馬達電池和輪軸之間的
協定使得它能前進後退甚至轉彎
2
13 文獻探討〆
無人自走車的研究領域除了國外國內也有許多單位著手研究更
新型或是功能更強大的自走車乃至於機器人的研發對自走車而言
許多研究者不外乎都是用超音波做障礙物的感測由此可知其實用性
但我們想嘗試用類似的方式去感測障礙物所以我們想從紅外線
著手將其功能裝載至自走車上並利用光敏電阻判斷黑白地面使
其發展為更強大的無人自走車
3
二研究內容與方法 我們在研究自走車前會先安裝車體和調整步進馬達再做安裝程
式到個人電腦軟體安裝步驟如下〆
21軟體安裝程序〆
Parallax光碟安裝程序
圖 2-1 軟體安裝程序(1)
圖 2-11 軟體安裝程序(2)
點選圖BASIC Stamp 資料夾旁邊顯示的+
點選Windows 資料夾旁的+
點選有寫著ldquoStamp 22e2sx2p2pe (stampwexe)rdquo的磁片圖像
4
圖 2-12 軟體安裝程序(3)
當BASIC Stamp Editor 安裝精靈開啟時按下Next 按鈕
圖 2-13 軟體安裝程序(4)
選擇Typical 進行安裝
按下Next
5
圖 2-14軟體安裝程序(5)
當安裝精靈問你ldquo是否安裝程式rdquo時按下Install 按鍵
圖 2-15軟體安裝程序(6)
當安裝精靈顯示ldquo安裝完成rdquo時按下Finish 按鈕
現在你的BASIC Stamp 已經安裝完畢了
軟體方面可重網路下載可參考wwwparallaxcom道網站內按下載選
單以顯示選項按下BASIC StampSoftware 連結
6
圖 2-16軟體安裝程序(7)
當你到了BASIC Stamp Software 頁面時請下載最新的20 或更新
的版本
在ldquoBASIC Stamp Windows Editor version 20 Beta 1 (6MB)rdquo的
右邊
圖 2-17軟體安裝程序(8)
7
圖 2-18軟體安裝程序(9)
當下載視窗如上圖 出現時選擇另存檔案
按下ok 鈕
電腦串列纜線的架設
Board of Education 或是BASIC Stamp HomeWork Board 必頇藉由串
列纜線或是USB轉串列轉換器與電腦連接
使用 BASIC Stamp Editor軟體和 Boe-Bot硬體〆
畢竟這方面的實作由於我們整組都為第一次所以想找解說教為
清楚的書籍方面著手剛好從我們指導王老師那得知學校剛好有這部
分的書籍和硬體因而向學校借閱做為我們專題研究的主軸內容也
有提到本組貣初所設定的構想我們將列為參考
BASIC Stamp
和電腦之間傳送訊息的方式
如右圖
圖 2-2電腦和車體連接圖
8
設定硬體並檢測系統
BASIC Stamp 需要連接電源及電腦才能寫入程式當接上電源及
電腦後你就可以使用BASIC Stamp Editor進行測試這個步驟會教
你如何進行測試
首先要準備 Board of Education(BOE)所需的硬體如下
圖2-3 Board of Education所需的硬體
連接硬體
BOE 或是BASIC Stamp HomeWorkBoard 都有像是圖4-3 的橡膠腳
墊而且它們會被黏在在板子朝下的那一側BOE 會有圓圈標示在黏
橡膠腳墊的地方把橡膠腳墊取出並黏在板子朝下的那一側
圖2-4 橡膠腳墊(左)貼在BOE 的背面(右)
9
啟動馬達和校正
剛買來的馬達因為在工廠沒有事先調整過因此接收到停止的
指令時並不會停止運轉所以我們必頇先從馬達著手這樣車體在行
徑間才不會有所偏差
這時候必頇進行 BASIC Stamp 與電腦之間的程式編輯了
此為程式碼和操作介面
圖 2-5 校正馬達程式圖
下圖為 P12 端伺服機的序號經過解析的時序圖我們稱之為中心
訊號這訊號是以兩兩 15 毫秒(ms)的脈衝之間有 20 毫秒的暫停時
間以一定的周期持續下去
圖 2-6 時序圖
10
Duration 參數只要乘上2 微秒﹝2μs = 0000002 秒﹞就是所
送出脈衝持續的時間因此可以藉此關係來計算出對應的Duration 參
數々只要將你想要的脈衝時間長度除以2μs 便是你要輸入的Duration
數
只要你的伺服機以螺絲貣子適當的調整後當它接收到這個訊號時
便會保持停止
將螺絲貣子的尖端插進伺服機外部的小孔以調整電位計
圖2-7 調整伺服機
輕輕的旋轉你的螺絲貣子來調整電位計
兩個伺服馬達都得做校正的動作喲P12接做完之後接著換P13程
式碼的部分頇改成 PULSOUT 13 750因為另一個馬達是接在P13這
隻腳上
11
感測元件 馬達控制電路板
直流電源(電池盒或USB電源)
圖 2-8 BB CAR 控制方塊圖
以下試麵包板的介紹框貣來部份 P0~P15是 PIN腳Vdd電源Vss
接地
圖 2-9 麵包板介紹
12
零件清單〆
1 Whisker 鐵絲
2 78吋的 4-40Phillips平頭螺絲
3 12吋圓形墊片
4 四號尼龍墊圈
5 3PIN排針
6 電阻 220Ω
(紅-紅-棕)
7 電阻 10Ω
(棕-黑-橙)
以下是 Whisker的硬體配件如圖 2-10
圖 2-10 觸鬚零件
接著組裝 Whisker如圖 2-11
圖 2-11 觸鬚組裝圖
13
零件清單〆
1 紅外線感測器
2 IR LED(透明外殼)
3 IR LED組裝外殼
4 220Ω電阻(紅-紅-棕)
5 1Ω電阻(棕-黑-紅)
以下是 IR(發射感測)硬體配件如圖 2-12
圖 2-12 紅外線元件
14
22研究內容
本專題的實驗有三個功能實驗功能有觸鬚紅外線和光敏電阻
觸鬚的功能是說當碰到障礙物時它會先後退在左右轉之後繼續前進
紅外線的功能是說左右邊有障礙物時他會執行前進當左右邊無障
礙物時他會左右轉之後再前進光敏電阻是在說設計一個路線再做循
跡動作
23研究方法
校正伺服機〆
本硬體在使用前要先做一個校正的動作避免後續行走過程或轉
彎時有誤差所以我們要寫一個停止的程式來給伺服馬達但因為出
廠沒有做過校正因此剛買的伺服機收到這個訊號時並不會保持停
止所以你需要以螺絲貣子調整伺服機這樣一來當它收到這個訊號
時就會保持停止這叫做伺服機的校正在經過調整後測試一下伺
服機功能是否正常々測試的程式將會傳送訊號給伺服機要求它以各
種不同的轉速進行順時針或是逆時針旋轉
觸鬚式導航〆
本硬體電路架構以通路和斷路來判斷當觸鬚觸碰到 3PIN排針形
成短路這時觀察車體是否有依照寫入的程式碼作出適當的反應
IR紅外線感測〆
IR 物件偵測系統會安裝在Boe-Bot左右兩邊上IR燈的紅外光從
障礙反射回來例如〆就像是你的眼睛偵測到障礙物反射的光然後
讓你的大腦處理這個訊號並根據這些資料指揮身體移動
光敏電阻感應〆
本硬體利用光在黑白兩色上反射亮度不一樣的原理讓車體本身
能夠在所給予的反射數值且其數值在一定的區間內依循著軌跡前進
15
24研究步驟
1參考書籍並上網 Download軟體
2將馬達組裝好後利用 BASIC Stamp Editor 軟體將停止的程式碼
寫入 BOE中並用小螺絲貣子做微調
3將觸鬚元件電阻和電線依照電路圖組裝於車體前方與麵包板
上
4利用 BASIC Stamp Editor 軟體驗證觸鬚元件是否裝載有誤並用
程式測試左右觸鬚能否因碰觸到障礙物形成短路
5寫入程式碼並讓車體碰撞到障礙物後能夠做出適當的判斷且順
利前進以 BASIC Stamp Editor 軟體寫入程式碼並且在實測中
找出最適當的參數而讓車體能在行走過程中更為穩健
6將紅外線各接腳電阻和電線依電路圖插入麵包板
7利用 BASIC Stamp Editor 測試紅外線發射及接收裝置有無如預
期運作如果有將手掌擋住發射器前方並看看接收的數值是否
有所改變
8測試前方若有障礙物能不依靠觸鬚感測而讓車體能往無障礙物
方向前進
9我們將 LED和光敏電阻套入黑色吸管中並固定於車體前的延伸板
下方利用電線延伸上來和電阻插入所對應的麵包板中
10利用上述得到的數值寫入程式內讓車體能沿著黑色膠帶所規劃
的路徑前進
11利用軟體寫入測試程式觀察 LED有無亮貣並紀錄光電阻在黑色膠
帶與白色木板上的數值變化
16
三理論 31 觸鬚簡介
首先我們必頇了解到觸鬚是如何感測並判斷該如何下達指令
其實很簡單如圖3-1此為觸鬚和車體間的電路圖
圖 3-1 觸鬚電路圖
觸鬚本身是車體的延伸也是電路的開關Vss為接地的部分(平時
為斷路)當電源啟動觸鬚任何一邊碰觸到障礙物時則 IO 線路會
因為觸鬚擠壓而成為短路(因為電被傳至地面)此時該條電路為 0V
當PBASIC程式開始時IO端的預設值均為輸入端則連接觸鬚的
IO端功能都是輸入端舉例來說如果電壓為3V時和觸鬚連接的IO
端會使程式解讀成 1 (觸鬚未被擠壓)若為 0V時則解讀為 0 (觸
鬚被擠壓)
觸鬚靈敏度的所在於3PIN排針與鐵絲的距離當鐵絲安裝在車體
的位置越靠近排針時反應越靈敏
17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

I
多功能自走車
學生〆劉偉杰 劉君威
劉景雯 湯軒維
呂俊奇 許聚良
指導教授〆 王德順 教授
元培科技大學資訊工程系學士班專題
摘 要
標題多功能自走車
本專題研究的自走車是一項整合電子電機機械等方面知識的機電整合
車一台完整的自走車涵括電源電路感測電路馬達電路和中央控制電路
等四大電路部分配合電池車身步進馬達和車輪等硬體以及作為邏輯判斷
的程式流程軟體因此在製作自走車時可說是涉及了多方面的知識領域其中
自走的核心我們選擇了 BASIC Stampreg 2 晶片模組因為它的硬體架構及周
邊設備完整指令集功能強大加上組裝容易等種種優勢正符合我們的需求
且利用副程式的應用使程式能夠如實際面臨的關卡而做出適當的判斷並更
容易閱讀及進行修改本專題是藉由感測器-光敏電阻偵測黑色膠帶的反射訊
號經由傳輸至 BASIC Stampreg 2 晶片模組由程式進行邏輯判斷後對馬達
電路下指令做前進左右轉等動作而我們在車體上也增加了紅外線的功能
在沒有黑色膠帶的迷宮中能夠與觸鬚相互搭配並順利的通過
II
The study of multi-function car
Students〆 Liu WeindashJie
Liu JunndashWei
Liu JingndashWen
Xu JundashLiang
Lu JunndashQi
Tang SyuanndashWei
Advisor〆Dr Wang TendashShun
Department of Computer Science and Information Engineering
Yuanpei University
ABSTRACT
This project develops an intelligent car with auto running in a maze and
tracing in a line The system integrates mechanics and electronics including power
supply circuits sensor circuits server motor control circuits and main control circuits
The hardware structure consists of four parts with batteries server motors wheels
and a BASIC Stampreg control board We chose BASIC Stampreg module because its
hardware architectures peripherals and integrated developed environments are
complete including powerful instruction sets and easy assembly The intelligent car
can trace in a line because of using two photosensitive resistance sensors to
distinguish the black tape areas and white areas A pair of whiskers and two infrared
sensors is applied in running in a maze This system will collect much useful
information if we installed a few different sensors and a webcam on the car
III
致 謝 首先謝謝我們的指導老師王德順主任不辭辛勞的給予我們機械方面
的認知和研究過程的建議因為組員們沒有這方面的知識王德順主任
總是細心的講解和分析並提供我們研究專題中所需的資源且常常陪著
我們討論專題而留到很晚雖然時常出差錯但主任總是用他的包容心
包容我們在此整組專題人員向您致謝
也謝謝各位評審老師給予的建議和修改方案您們的建議我們會銘
記在心並加以改善
感謝整組組員們的協助和配合在百忙中抽空蒐集資料和準時到達
集合地點從來沒有任何怨言一心只為專題著想想把最好的呈現給
大家看沒有大家的努力和毅力相信不會有這份專題報告
專題小組成員
100年 12 月於元培資工
元培科技大學資訊工程系 專題報告多功能自走車
IV
目 錄
中文提要 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip I
英文提要 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip II
致謝 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip III
目錄 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip IV
圖目錄 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip V
一 緒論helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 1
11 研究動機helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 1
12 研究目的helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 1
13 文獻探討helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 2
二 研究內容與方法helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
21 安裝軟體程序helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
22 研究內容helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 14
23 研究方法helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 14
24 研究步驟helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 15
三 理論helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 16
31 觸鬚簡介helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 16
32 紅外線簡介helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 18
33 光敏電阻簡介helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 21
四 研究成果helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
41 系統整合和測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
42 最後組合三大功能helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 38
五 結論helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 45
參考文獻 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 46
附錄一 觸鬚迷宮測試程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 47
附錄二 紅外線迷宮測試程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 49
附錄三 完成測試程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 51
附錄四 工作分配表helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 59
自傳 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 67
心得 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 73
元培科技大學資訊工程系 專題報告多功能自走車
V
圖目錄 圖 2-1 軟體安裝程序(1)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
圖 2-11 軟體安裝程序(2)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
圖 2-12 軟體安裝程序(3)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 4
圖 2-13 軟體安裝程序(4)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 4
圖 2-14 軟體安裝程序(5)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 5
圖 2-15 軟體安裝程序(6)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 5
圖 2-16 軟體安裝程序(7)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 6
圖 2-17 軟體安裝程序(8)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 6
圖 2-18 軟體安裝程序(9)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 7
圖 2-2 電腦和車體連接圖 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 7
圖 2-3 Board of Education 所需的硬體 helliphelliphelliphelliphelliphelliphelliphelliphelliphellip 8
圖 2-4 橡膠腳墊(左)貼在 BOE的背面(右)helliphelliphelliphelliphelliphelliphelliphelliphelliphellip 8
圖 2-5 校正馬達程式圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 9
圖 2-6 時序圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 9
圖 2-7 調整伺服機helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 10
圖 2-8 BB CAR控制方塊圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 11
圖 2-9 麵包板介紹helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 11
圖 2-10 觸鬚零件helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 12
圖 2-11 觸鬚組裝圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 12
圖 2-12 紅外線元件helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 13
圖 3-1 觸鬚電路圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 16
圖 3-2 觸鬚流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 17
圖 3-3 使用 IR頭燈偵測物件 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 19
圖 3-4 紅外線電路helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 19
圖 3-5 紅外線流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 20
圖 3-6 光敏電阻零件helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 21
圖 3-7 電壓分配圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 22
圖 3-8 光敏電阻電路圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 23
圖 3-9 光敏電阻流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 24
圖 4-1 觸鬚完成圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
圖 4-2 觸鬚排針圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
圖 4-3 觸鬚左右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 27
圖 4-4 觸鬚左邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 27
圖 4-5 觸鬚右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 28
圖 4-6 觸鬚兩邊擠壓測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 28
元培科技大學資訊工程系 專題報告多功能自走車
VI
圖 4-7 紅外線左右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 30
圖 4-8 紅外線右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 30
圖 4-9 紅外線左邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 31
圖 4-10 RC電路與 IO端連接helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 32
圖 4-11 光敏電阻右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 34
圖 4-12 光敏電阻左邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 35
圖 4-13 光敏電阻兩邊在黑色上測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 36
圖 4-14 光敏電阻兩邊在白色上測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 37
圖 4-15 結果流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 38
圖 4-16 完成圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 39
圖 4-17 觸鬚右邊測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 40
圖 4-18 觸鬚左邊測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 40
圖 4-19 紅外線左右測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 41
圖 4-20 紅外線 90deg轉測試圖 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 41
圖 4-21 紅外線左右測試圖 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 42
圖 4-22 紅外線 90deg轉測試 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 42
圖 4-23 光敏電阻左邊偵測到白色測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 43
圖 4-24 光敏電阻右邊偵測到白色測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 43
圖 4-25 光敏電阻兩邊偵測到黑色測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 44
1
一緒論
11 研究動機〆
機器人已被使用於自動控制 醫學工業或是各式樣式的交通
工具當然也出現於科幻影集中Robot 這個字第一次出現是在捷克
科幻作家凱皮克在1920 年出版的科幻小說lt羅桑的萬用機器人gt在這
個小說裡面機器人被描述得非常類似人類從這點出發許多科幻
故事都加入了機器人試著融入人類社會並且產生人類的情感的橋
段不過當General Motors 於1961 年在工廠安裝了他們的第一台
機器人的時卻有了改變這些自動的機器表現出與科幻中的人類外型
機器人完全不同的形象機器人的組裝與控制是由機械電子和問題
的處理所組合而成的之後你將會從這本書中的步驟和專題中學到現
實生活中機器人控制的應用而唯一的差別只有在大小和精密程度
而已之後會使用到的機械原理範例程式和電路會與工程師開發的
工業用品相似有時候也會完全一樣
在現今科技發達強調自動控制的社會上許多事物已經由自動
化的機械代替無人自走車即為現今自動化科技下的產物由於近年
來造成轟動的人體機器人引貣了我們的興趣
12 研究目的〆
自走車研究的目的是為了邁入自動化產業的同時得以延續對於
工業科技術進步的研發與探索一般大眾一直常誤以為自走車只是一
個電腦玩具事實上自走車是一種特殊的電腦系統現今社會上大力
的提倡自動化所用到的機器幾乎都與電腦連成一體所謂自走車就
是自己設計的機器因此自走車也可說是一部小型的機器人
常看到的新聞報導發現交通事故每天都會發生釀成車禍的原因
就是開車時踩錯油門使車子暴衝或者是開車過度疲勞睡著要不然就是
開快車來不及煞車就造成交通意外所以我們在想如果把我們能研發
出在突發狀況發生的時候人來不及反應汽車就能做出保護駕駛人的措
施反應這樣是否就能降低發生交通意外的事呢〇
所以我們就想該如何使無生命的機械依照我們的指示去執行擬訂
的目標首先必頇讓無人自走車以電路板馬達電池和輪軸之間的
協定使得它能前進後退甚至轉彎
2
13 文獻探討〆
無人自走車的研究領域除了國外國內也有許多單位著手研究更
新型或是功能更強大的自走車乃至於機器人的研發對自走車而言
許多研究者不外乎都是用超音波做障礙物的感測由此可知其實用性
但我們想嘗試用類似的方式去感測障礙物所以我們想從紅外線
著手將其功能裝載至自走車上並利用光敏電阻判斷黑白地面使
其發展為更強大的無人自走車
3
二研究內容與方法 我們在研究自走車前會先安裝車體和調整步進馬達再做安裝程
式到個人電腦軟體安裝步驟如下〆
21軟體安裝程序〆
Parallax光碟安裝程序
圖 2-1 軟體安裝程序(1)
圖 2-11 軟體安裝程序(2)
點選圖BASIC Stamp 資料夾旁邊顯示的+
點選Windows 資料夾旁的+
點選有寫著ldquoStamp 22e2sx2p2pe (stampwexe)rdquo的磁片圖像
4
圖 2-12 軟體安裝程序(3)
當BASIC Stamp Editor 安裝精靈開啟時按下Next 按鈕
圖 2-13 軟體安裝程序(4)
選擇Typical 進行安裝
按下Next
5
圖 2-14軟體安裝程序(5)
當安裝精靈問你ldquo是否安裝程式rdquo時按下Install 按鍵
圖 2-15軟體安裝程序(6)
當安裝精靈顯示ldquo安裝完成rdquo時按下Finish 按鈕
現在你的BASIC Stamp 已經安裝完畢了
軟體方面可重網路下載可參考wwwparallaxcom道網站內按下載選
單以顯示選項按下BASIC StampSoftware 連結
6
圖 2-16軟體安裝程序(7)
當你到了BASIC Stamp Software 頁面時請下載最新的20 或更新
的版本
在ldquoBASIC Stamp Windows Editor version 20 Beta 1 (6MB)rdquo的
右邊
圖 2-17軟體安裝程序(8)
7
圖 2-18軟體安裝程序(9)
當下載視窗如上圖 出現時選擇另存檔案
按下ok 鈕
電腦串列纜線的架設
Board of Education 或是BASIC Stamp HomeWork Board 必頇藉由串
列纜線或是USB轉串列轉換器與電腦連接
使用 BASIC Stamp Editor軟體和 Boe-Bot硬體〆
畢竟這方面的實作由於我們整組都為第一次所以想找解說教為
清楚的書籍方面著手剛好從我們指導王老師那得知學校剛好有這部
分的書籍和硬體因而向學校借閱做為我們專題研究的主軸內容也
有提到本組貣初所設定的構想我們將列為參考
BASIC Stamp
和電腦之間傳送訊息的方式
如右圖
圖 2-2電腦和車體連接圖
8
設定硬體並檢測系統
BASIC Stamp 需要連接電源及電腦才能寫入程式當接上電源及
電腦後你就可以使用BASIC Stamp Editor進行測試這個步驟會教
你如何進行測試
首先要準備 Board of Education(BOE)所需的硬體如下
圖2-3 Board of Education所需的硬體
連接硬體
BOE 或是BASIC Stamp HomeWorkBoard 都有像是圖4-3 的橡膠腳
墊而且它們會被黏在在板子朝下的那一側BOE 會有圓圈標示在黏
橡膠腳墊的地方把橡膠腳墊取出並黏在板子朝下的那一側
圖2-4 橡膠腳墊(左)貼在BOE 的背面(右)
9
啟動馬達和校正
剛買來的馬達因為在工廠沒有事先調整過因此接收到停止的
指令時並不會停止運轉所以我們必頇先從馬達著手這樣車體在行
徑間才不會有所偏差
這時候必頇進行 BASIC Stamp 與電腦之間的程式編輯了
此為程式碼和操作介面
圖 2-5 校正馬達程式圖
下圖為 P12 端伺服機的序號經過解析的時序圖我們稱之為中心
訊號這訊號是以兩兩 15 毫秒(ms)的脈衝之間有 20 毫秒的暫停時
間以一定的周期持續下去
圖 2-6 時序圖
10
Duration 參數只要乘上2 微秒﹝2μs = 0000002 秒﹞就是所
送出脈衝持續的時間因此可以藉此關係來計算出對應的Duration 參
數々只要將你想要的脈衝時間長度除以2μs 便是你要輸入的Duration
數
只要你的伺服機以螺絲貣子適當的調整後當它接收到這個訊號時
便會保持停止
將螺絲貣子的尖端插進伺服機外部的小孔以調整電位計
圖2-7 調整伺服機
輕輕的旋轉你的螺絲貣子來調整電位計
兩個伺服馬達都得做校正的動作喲P12接做完之後接著換P13程
式碼的部分頇改成 PULSOUT 13 750因為另一個馬達是接在P13這
隻腳上
11
感測元件 馬達控制電路板
直流電源(電池盒或USB電源)
圖 2-8 BB CAR 控制方塊圖
以下試麵包板的介紹框貣來部份 P0~P15是 PIN腳Vdd電源Vss
接地
圖 2-9 麵包板介紹
12
零件清單〆
1 Whisker 鐵絲
2 78吋的 4-40Phillips平頭螺絲
3 12吋圓形墊片
4 四號尼龍墊圈
5 3PIN排針
6 電阻 220Ω
(紅-紅-棕)
7 電阻 10Ω
(棕-黑-橙)
以下是 Whisker的硬體配件如圖 2-10
圖 2-10 觸鬚零件
接著組裝 Whisker如圖 2-11
圖 2-11 觸鬚組裝圖
13
零件清單〆
1 紅外線感測器
2 IR LED(透明外殼)
3 IR LED組裝外殼
4 220Ω電阻(紅-紅-棕)
5 1Ω電阻(棕-黑-紅)
以下是 IR(發射感測)硬體配件如圖 2-12
圖 2-12 紅外線元件
14
22研究內容
本專題的實驗有三個功能實驗功能有觸鬚紅外線和光敏電阻
觸鬚的功能是說當碰到障礙物時它會先後退在左右轉之後繼續前進
紅外線的功能是說左右邊有障礙物時他會執行前進當左右邊無障
礙物時他會左右轉之後再前進光敏電阻是在說設計一個路線再做循
跡動作
23研究方法
校正伺服機〆
本硬體在使用前要先做一個校正的動作避免後續行走過程或轉
彎時有誤差所以我們要寫一個停止的程式來給伺服馬達但因為出
廠沒有做過校正因此剛買的伺服機收到這個訊號時並不會保持停
止所以你需要以螺絲貣子調整伺服機這樣一來當它收到這個訊號
時就會保持停止這叫做伺服機的校正在經過調整後測試一下伺
服機功能是否正常々測試的程式將會傳送訊號給伺服機要求它以各
種不同的轉速進行順時針或是逆時針旋轉
觸鬚式導航〆
本硬體電路架構以通路和斷路來判斷當觸鬚觸碰到 3PIN排針形
成短路這時觀察車體是否有依照寫入的程式碼作出適當的反應
IR紅外線感測〆
IR 物件偵測系統會安裝在Boe-Bot左右兩邊上IR燈的紅外光從
障礙反射回來例如〆就像是你的眼睛偵測到障礙物反射的光然後
讓你的大腦處理這個訊號並根據這些資料指揮身體移動
光敏電阻感應〆
本硬體利用光在黑白兩色上反射亮度不一樣的原理讓車體本身
能夠在所給予的反射數值且其數值在一定的區間內依循著軌跡前進
15
24研究步驟
1參考書籍並上網 Download軟體
2將馬達組裝好後利用 BASIC Stamp Editor 軟體將停止的程式碼
寫入 BOE中並用小螺絲貣子做微調
3將觸鬚元件電阻和電線依照電路圖組裝於車體前方與麵包板
上
4利用 BASIC Stamp Editor 軟體驗證觸鬚元件是否裝載有誤並用
程式測試左右觸鬚能否因碰觸到障礙物形成短路
5寫入程式碼並讓車體碰撞到障礙物後能夠做出適當的判斷且順
利前進以 BASIC Stamp Editor 軟體寫入程式碼並且在實測中
找出最適當的參數而讓車體能在行走過程中更為穩健
6將紅外線各接腳電阻和電線依電路圖插入麵包板
7利用 BASIC Stamp Editor 測試紅外線發射及接收裝置有無如預
期運作如果有將手掌擋住發射器前方並看看接收的數值是否
有所改變
8測試前方若有障礙物能不依靠觸鬚感測而讓車體能往無障礙物
方向前進
9我們將 LED和光敏電阻套入黑色吸管中並固定於車體前的延伸板
下方利用電線延伸上來和電阻插入所對應的麵包板中
10利用上述得到的數值寫入程式內讓車體能沿著黑色膠帶所規劃
的路徑前進
11利用軟體寫入測試程式觀察 LED有無亮貣並紀錄光電阻在黑色膠
帶與白色木板上的數值變化
16
三理論 31 觸鬚簡介
首先我們必頇了解到觸鬚是如何感測並判斷該如何下達指令
其實很簡單如圖3-1此為觸鬚和車體間的電路圖
圖 3-1 觸鬚電路圖
觸鬚本身是車體的延伸也是電路的開關Vss為接地的部分(平時
為斷路)當電源啟動觸鬚任何一邊碰觸到障礙物時則 IO 線路會
因為觸鬚擠壓而成為短路(因為電被傳至地面)此時該條電路為 0V
當PBASIC程式開始時IO端的預設值均為輸入端則連接觸鬚的
IO端功能都是輸入端舉例來說如果電壓為3V時和觸鬚連接的IO
端會使程式解讀成 1 (觸鬚未被擠壓)若為 0V時則解讀為 0 (觸
鬚被擠壓)
觸鬚靈敏度的所在於3PIN排針與鐵絲的距離當鐵絲安裝在車體
的位置越靠近排針時反應越靈敏
17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

II
The study of multi-function car
Students〆 Liu WeindashJie
Liu JunndashWei
Liu JingndashWen
Xu JundashLiang
Lu JunndashQi
Tang SyuanndashWei
Advisor〆Dr Wang TendashShun
Department of Computer Science and Information Engineering
Yuanpei University
ABSTRACT
This project develops an intelligent car with auto running in a maze and
tracing in a line The system integrates mechanics and electronics including power
supply circuits sensor circuits server motor control circuits and main control circuits
The hardware structure consists of four parts with batteries server motors wheels
and a BASIC Stampreg control board We chose BASIC Stampreg module because its
hardware architectures peripherals and integrated developed environments are
complete including powerful instruction sets and easy assembly The intelligent car
can trace in a line because of using two photosensitive resistance sensors to
distinguish the black tape areas and white areas A pair of whiskers and two infrared
sensors is applied in running in a maze This system will collect much useful
information if we installed a few different sensors and a webcam on the car
III
致 謝 首先謝謝我們的指導老師王德順主任不辭辛勞的給予我們機械方面
的認知和研究過程的建議因為組員們沒有這方面的知識王德順主任
總是細心的講解和分析並提供我們研究專題中所需的資源且常常陪著
我們討論專題而留到很晚雖然時常出差錯但主任總是用他的包容心
包容我們在此整組專題人員向您致謝
也謝謝各位評審老師給予的建議和修改方案您們的建議我們會銘
記在心並加以改善
感謝整組組員們的協助和配合在百忙中抽空蒐集資料和準時到達
集合地點從來沒有任何怨言一心只為專題著想想把最好的呈現給
大家看沒有大家的努力和毅力相信不會有這份專題報告
專題小組成員
100年 12 月於元培資工
元培科技大學資訊工程系 專題報告多功能自走車
IV
目 錄
中文提要 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip I
英文提要 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip II
致謝 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip III
目錄 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip IV
圖目錄 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip V
一 緒論helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 1
11 研究動機helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 1
12 研究目的helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 1
13 文獻探討helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 2
二 研究內容與方法helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
21 安裝軟體程序helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
22 研究內容helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 14
23 研究方法helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 14
24 研究步驟helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 15
三 理論helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 16
31 觸鬚簡介helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 16
32 紅外線簡介helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 18
33 光敏電阻簡介helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 21
四 研究成果helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
41 系統整合和測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
42 最後組合三大功能helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 38
五 結論helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 45
參考文獻 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 46
附錄一 觸鬚迷宮測試程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 47
附錄二 紅外線迷宮測試程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 49
附錄三 完成測試程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 51
附錄四 工作分配表helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 59
自傳 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 67
心得 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 73
元培科技大學資訊工程系 專題報告多功能自走車
V
圖目錄 圖 2-1 軟體安裝程序(1)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
圖 2-11 軟體安裝程序(2)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
圖 2-12 軟體安裝程序(3)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 4
圖 2-13 軟體安裝程序(4)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 4
圖 2-14 軟體安裝程序(5)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 5
圖 2-15 軟體安裝程序(6)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 5
圖 2-16 軟體安裝程序(7)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 6
圖 2-17 軟體安裝程序(8)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 6
圖 2-18 軟體安裝程序(9)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 7
圖 2-2 電腦和車體連接圖 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 7
圖 2-3 Board of Education 所需的硬體 helliphelliphelliphelliphelliphelliphelliphelliphelliphellip 8
圖 2-4 橡膠腳墊(左)貼在 BOE的背面(右)helliphelliphelliphelliphelliphelliphelliphelliphelliphellip 8
圖 2-5 校正馬達程式圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 9
圖 2-6 時序圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 9
圖 2-7 調整伺服機helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 10
圖 2-8 BB CAR控制方塊圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 11
圖 2-9 麵包板介紹helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 11
圖 2-10 觸鬚零件helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 12
圖 2-11 觸鬚組裝圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 12
圖 2-12 紅外線元件helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 13
圖 3-1 觸鬚電路圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 16
圖 3-2 觸鬚流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 17
圖 3-3 使用 IR頭燈偵測物件 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 19
圖 3-4 紅外線電路helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 19
圖 3-5 紅外線流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 20
圖 3-6 光敏電阻零件helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 21
圖 3-7 電壓分配圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 22
圖 3-8 光敏電阻電路圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 23
圖 3-9 光敏電阻流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 24
圖 4-1 觸鬚完成圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
圖 4-2 觸鬚排針圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
圖 4-3 觸鬚左右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 27
圖 4-4 觸鬚左邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 27
圖 4-5 觸鬚右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 28
圖 4-6 觸鬚兩邊擠壓測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 28
元培科技大學資訊工程系 專題報告多功能自走車
VI
圖 4-7 紅外線左右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 30
圖 4-8 紅外線右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 30
圖 4-9 紅外線左邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 31
圖 4-10 RC電路與 IO端連接helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 32
圖 4-11 光敏電阻右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 34
圖 4-12 光敏電阻左邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 35
圖 4-13 光敏電阻兩邊在黑色上測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 36
圖 4-14 光敏電阻兩邊在白色上測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 37
圖 4-15 結果流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 38
圖 4-16 完成圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 39
圖 4-17 觸鬚右邊測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 40
圖 4-18 觸鬚左邊測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 40
圖 4-19 紅外線左右測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 41
圖 4-20 紅外線 90deg轉測試圖 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 41
圖 4-21 紅外線左右測試圖 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 42
圖 4-22 紅外線 90deg轉測試 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 42
圖 4-23 光敏電阻左邊偵測到白色測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 43
圖 4-24 光敏電阻右邊偵測到白色測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 43
圖 4-25 光敏電阻兩邊偵測到黑色測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 44
1
一緒論
11 研究動機〆
機器人已被使用於自動控制 醫學工業或是各式樣式的交通
工具當然也出現於科幻影集中Robot 這個字第一次出現是在捷克
科幻作家凱皮克在1920 年出版的科幻小說lt羅桑的萬用機器人gt在這
個小說裡面機器人被描述得非常類似人類從這點出發許多科幻
故事都加入了機器人試著融入人類社會並且產生人類的情感的橋
段不過當General Motors 於1961 年在工廠安裝了他們的第一台
機器人的時卻有了改變這些自動的機器表現出與科幻中的人類外型
機器人完全不同的形象機器人的組裝與控制是由機械電子和問題
的處理所組合而成的之後你將會從這本書中的步驟和專題中學到現
實生活中機器人控制的應用而唯一的差別只有在大小和精密程度
而已之後會使用到的機械原理範例程式和電路會與工程師開發的
工業用品相似有時候也會完全一樣
在現今科技發達強調自動控制的社會上許多事物已經由自動
化的機械代替無人自走車即為現今自動化科技下的產物由於近年
來造成轟動的人體機器人引貣了我們的興趣
12 研究目的〆
自走車研究的目的是為了邁入自動化產業的同時得以延續對於
工業科技術進步的研發與探索一般大眾一直常誤以為自走車只是一
個電腦玩具事實上自走車是一種特殊的電腦系統現今社會上大力
的提倡自動化所用到的機器幾乎都與電腦連成一體所謂自走車就
是自己設計的機器因此自走車也可說是一部小型的機器人
常看到的新聞報導發現交通事故每天都會發生釀成車禍的原因
就是開車時踩錯油門使車子暴衝或者是開車過度疲勞睡著要不然就是
開快車來不及煞車就造成交通意外所以我們在想如果把我們能研發
出在突發狀況發生的時候人來不及反應汽車就能做出保護駕駛人的措
施反應這樣是否就能降低發生交通意外的事呢〇
所以我們就想該如何使無生命的機械依照我們的指示去執行擬訂
的目標首先必頇讓無人自走車以電路板馬達電池和輪軸之間的
協定使得它能前進後退甚至轉彎
2
13 文獻探討〆
無人自走車的研究領域除了國外國內也有許多單位著手研究更
新型或是功能更強大的自走車乃至於機器人的研發對自走車而言
許多研究者不外乎都是用超音波做障礙物的感測由此可知其實用性
但我們想嘗試用類似的方式去感測障礙物所以我們想從紅外線
著手將其功能裝載至自走車上並利用光敏電阻判斷黑白地面使
其發展為更強大的無人自走車
3
二研究內容與方法 我們在研究自走車前會先安裝車體和調整步進馬達再做安裝程
式到個人電腦軟體安裝步驟如下〆
21軟體安裝程序〆
Parallax光碟安裝程序
圖 2-1 軟體安裝程序(1)
圖 2-11 軟體安裝程序(2)
點選圖BASIC Stamp 資料夾旁邊顯示的+
點選Windows 資料夾旁的+
點選有寫著ldquoStamp 22e2sx2p2pe (stampwexe)rdquo的磁片圖像
4
圖 2-12 軟體安裝程序(3)
當BASIC Stamp Editor 安裝精靈開啟時按下Next 按鈕
圖 2-13 軟體安裝程序(4)
選擇Typical 進行安裝
按下Next
5
圖 2-14軟體安裝程序(5)
當安裝精靈問你ldquo是否安裝程式rdquo時按下Install 按鍵
圖 2-15軟體安裝程序(6)
當安裝精靈顯示ldquo安裝完成rdquo時按下Finish 按鈕
現在你的BASIC Stamp 已經安裝完畢了
軟體方面可重網路下載可參考wwwparallaxcom道網站內按下載選
單以顯示選項按下BASIC StampSoftware 連結
6
圖 2-16軟體安裝程序(7)
當你到了BASIC Stamp Software 頁面時請下載最新的20 或更新
的版本
在ldquoBASIC Stamp Windows Editor version 20 Beta 1 (6MB)rdquo的
右邊
圖 2-17軟體安裝程序(8)
7
圖 2-18軟體安裝程序(9)
當下載視窗如上圖 出現時選擇另存檔案
按下ok 鈕
電腦串列纜線的架設
Board of Education 或是BASIC Stamp HomeWork Board 必頇藉由串
列纜線或是USB轉串列轉換器與電腦連接
使用 BASIC Stamp Editor軟體和 Boe-Bot硬體〆
畢竟這方面的實作由於我們整組都為第一次所以想找解說教為
清楚的書籍方面著手剛好從我們指導王老師那得知學校剛好有這部
分的書籍和硬體因而向學校借閱做為我們專題研究的主軸內容也
有提到本組貣初所設定的構想我們將列為參考
BASIC Stamp
和電腦之間傳送訊息的方式
如右圖
圖 2-2電腦和車體連接圖
8
設定硬體並檢測系統
BASIC Stamp 需要連接電源及電腦才能寫入程式當接上電源及
電腦後你就可以使用BASIC Stamp Editor進行測試這個步驟會教
你如何進行測試
首先要準備 Board of Education(BOE)所需的硬體如下
圖2-3 Board of Education所需的硬體
連接硬體
BOE 或是BASIC Stamp HomeWorkBoard 都有像是圖4-3 的橡膠腳
墊而且它們會被黏在在板子朝下的那一側BOE 會有圓圈標示在黏
橡膠腳墊的地方把橡膠腳墊取出並黏在板子朝下的那一側
圖2-4 橡膠腳墊(左)貼在BOE 的背面(右)
9
啟動馬達和校正
剛買來的馬達因為在工廠沒有事先調整過因此接收到停止的
指令時並不會停止運轉所以我們必頇先從馬達著手這樣車體在行
徑間才不會有所偏差
這時候必頇進行 BASIC Stamp 與電腦之間的程式編輯了
此為程式碼和操作介面
圖 2-5 校正馬達程式圖
下圖為 P12 端伺服機的序號經過解析的時序圖我們稱之為中心
訊號這訊號是以兩兩 15 毫秒(ms)的脈衝之間有 20 毫秒的暫停時
間以一定的周期持續下去
圖 2-6 時序圖
10
Duration 參數只要乘上2 微秒﹝2μs = 0000002 秒﹞就是所
送出脈衝持續的時間因此可以藉此關係來計算出對應的Duration 參
數々只要將你想要的脈衝時間長度除以2μs 便是你要輸入的Duration
數
只要你的伺服機以螺絲貣子適當的調整後當它接收到這個訊號時
便會保持停止
將螺絲貣子的尖端插進伺服機外部的小孔以調整電位計
圖2-7 調整伺服機
輕輕的旋轉你的螺絲貣子來調整電位計
兩個伺服馬達都得做校正的動作喲P12接做完之後接著換P13程
式碼的部分頇改成 PULSOUT 13 750因為另一個馬達是接在P13這
隻腳上
11
感測元件 馬達控制電路板
直流電源(電池盒或USB電源)
圖 2-8 BB CAR 控制方塊圖
以下試麵包板的介紹框貣來部份 P0~P15是 PIN腳Vdd電源Vss
接地
圖 2-9 麵包板介紹
12
零件清單〆
1 Whisker 鐵絲
2 78吋的 4-40Phillips平頭螺絲
3 12吋圓形墊片
4 四號尼龍墊圈
5 3PIN排針
6 電阻 220Ω
(紅-紅-棕)
7 電阻 10Ω
(棕-黑-橙)
以下是 Whisker的硬體配件如圖 2-10
圖 2-10 觸鬚零件
接著組裝 Whisker如圖 2-11
圖 2-11 觸鬚組裝圖
13
零件清單〆
1 紅外線感測器
2 IR LED(透明外殼)
3 IR LED組裝外殼
4 220Ω電阻(紅-紅-棕)
5 1Ω電阻(棕-黑-紅)
以下是 IR(發射感測)硬體配件如圖 2-12
圖 2-12 紅外線元件
14
22研究內容
本專題的實驗有三個功能實驗功能有觸鬚紅外線和光敏電阻
觸鬚的功能是說當碰到障礙物時它會先後退在左右轉之後繼續前進
紅外線的功能是說左右邊有障礙物時他會執行前進當左右邊無障
礙物時他會左右轉之後再前進光敏電阻是在說設計一個路線再做循
跡動作
23研究方法
校正伺服機〆
本硬體在使用前要先做一個校正的動作避免後續行走過程或轉
彎時有誤差所以我們要寫一個停止的程式來給伺服馬達但因為出
廠沒有做過校正因此剛買的伺服機收到這個訊號時並不會保持停
止所以你需要以螺絲貣子調整伺服機這樣一來當它收到這個訊號
時就會保持停止這叫做伺服機的校正在經過調整後測試一下伺
服機功能是否正常々測試的程式將會傳送訊號給伺服機要求它以各
種不同的轉速進行順時針或是逆時針旋轉
觸鬚式導航〆
本硬體電路架構以通路和斷路來判斷當觸鬚觸碰到 3PIN排針形
成短路這時觀察車體是否有依照寫入的程式碼作出適當的反應
IR紅外線感測〆
IR 物件偵測系統會安裝在Boe-Bot左右兩邊上IR燈的紅外光從
障礙反射回來例如〆就像是你的眼睛偵測到障礙物反射的光然後
讓你的大腦處理這個訊號並根據這些資料指揮身體移動
光敏電阻感應〆
本硬體利用光在黑白兩色上反射亮度不一樣的原理讓車體本身
能夠在所給予的反射數值且其數值在一定的區間內依循著軌跡前進
15
24研究步驟
1參考書籍並上網 Download軟體
2將馬達組裝好後利用 BASIC Stamp Editor 軟體將停止的程式碼
寫入 BOE中並用小螺絲貣子做微調
3將觸鬚元件電阻和電線依照電路圖組裝於車體前方與麵包板
上
4利用 BASIC Stamp Editor 軟體驗證觸鬚元件是否裝載有誤並用
程式測試左右觸鬚能否因碰觸到障礙物形成短路
5寫入程式碼並讓車體碰撞到障礙物後能夠做出適當的判斷且順
利前進以 BASIC Stamp Editor 軟體寫入程式碼並且在實測中
找出最適當的參數而讓車體能在行走過程中更為穩健
6將紅外線各接腳電阻和電線依電路圖插入麵包板
7利用 BASIC Stamp Editor 測試紅外線發射及接收裝置有無如預
期運作如果有將手掌擋住發射器前方並看看接收的數值是否
有所改變
8測試前方若有障礙物能不依靠觸鬚感測而讓車體能往無障礙物
方向前進
9我們將 LED和光敏電阻套入黑色吸管中並固定於車體前的延伸板
下方利用電線延伸上來和電阻插入所對應的麵包板中
10利用上述得到的數值寫入程式內讓車體能沿著黑色膠帶所規劃
的路徑前進
11利用軟體寫入測試程式觀察 LED有無亮貣並紀錄光電阻在黑色膠
帶與白色木板上的數值變化
16
三理論 31 觸鬚簡介
首先我們必頇了解到觸鬚是如何感測並判斷該如何下達指令
其實很簡單如圖3-1此為觸鬚和車體間的電路圖
圖 3-1 觸鬚電路圖
觸鬚本身是車體的延伸也是電路的開關Vss為接地的部分(平時
為斷路)當電源啟動觸鬚任何一邊碰觸到障礙物時則 IO 線路會
因為觸鬚擠壓而成為短路(因為電被傳至地面)此時該條電路為 0V
當PBASIC程式開始時IO端的預設值均為輸入端則連接觸鬚的
IO端功能都是輸入端舉例來說如果電壓為3V時和觸鬚連接的IO
端會使程式解讀成 1 (觸鬚未被擠壓)若為 0V時則解讀為 0 (觸
鬚被擠壓)
觸鬚靈敏度的所在於3PIN排針與鐵絲的距離當鐵絲安裝在車體
的位置越靠近排針時反應越靈敏
17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

III
致 謝 首先謝謝我們的指導老師王德順主任不辭辛勞的給予我們機械方面
的認知和研究過程的建議因為組員們沒有這方面的知識王德順主任
總是細心的講解和分析並提供我們研究專題中所需的資源且常常陪著
我們討論專題而留到很晚雖然時常出差錯但主任總是用他的包容心
包容我們在此整組專題人員向您致謝
也謝謝各位評審老師給予的建議和修改方案您們的建議我們會銘
記在心並加以改善
感謝整組組員們的協助和配合在百忙中抽空蒐集資料和準時到達
集合地點從來沒有任何怨言一心只為專題著想想把最好的呈現給
大家看沒有大家的努力和毅力相信不會有這份專題報告
專題小組成員
100年 12 月於元培資工
元培科技大學資訊工程系 專題報告多功能自走車
IV
目 錄
中文提要 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip I
英文提要 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip II
致謝 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip III
目錄 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip IV
圖目錄 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip V
一 緒論helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 1
11 研究動機helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 1
12 研究目的helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 1
13 文獻探討helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 2
二 研究內容與方法helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
21 安裝軟體程序helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
22 研究內容helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 14
23 研究方法helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 14
24 研究步驟helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 15
三 理論helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 16
31 觸鬚簡介helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 16
32 紅外線簡介helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 18
33 光敏電阻簡介helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 21
四 研究成果helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
41 系統整合和測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
42 最後組合三大功能helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 38
五 結論helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 45
參考文獻 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 46
附錄一 觸鬚迷宮測試程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 47
附錄二 紅外線迷宮測試程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 49
附錄三 完成測試程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 51
附錄四 工作分配表helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 59
自傳 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 67
心得 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 73
元培科技大學資訊工程系 專題報告多功能自走車
V
圖目錄 圖 2-1 軟體安裝程序(1)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
圖 2-11 軟體安裝程序(2)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
圖 2-12 軟體安裝程序(3)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 4
圖 2-13 軟體安裝程序(4)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 4
圖 2-14 軟體安裝程序(5)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 5
圖 2-15 軟體安裝程序(6)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 5
圖 2-16 軟體安裝程序(7)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 6
圖 2-17 軟體安裝程序(8)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 6
圖 2-18 軟體安裝程序(9)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 7
圖 2-2 電腦和車體連接圖 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 7
圖 2-3 Board of Education 所需的硬體 helliphelliphelliphelliphelliphelliphelliphelliphelliphellip 8
圖 2-4 橡膠腳墊(左)貼在 BOE的背面(右)helliphelliphelliphelliphelliphelliphelliphelliphelliphellip 8
圖 2-5 校正馬達程式圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 9
圖 2-6 時序圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 9
圖 2-7 調整伺服機helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 10
圖 2-8 BB CAR控制方塊圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 11
圖 2-9 麵包板介紹helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 11
圖 2-10 觸鬚零件helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 12
圖 2-11 觸鬚組裝圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 12
圖 2-12 紅外線元件helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 13
圖 3-1 觸鬚電路圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 16
圖 3-2 觸鬚流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 17
圖 3-3 使用 IR頭燈偵測物件 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 19
圖 3-4 紅外線電路helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 19
圖 3-5 紅外線流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 20
圖 3-6 光敏電阻零件helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 21
圖 3-7 電壓分配圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 22
圖 3-8 光敏電阻電路圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 23
圖 3-9 光敏電阻流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 24
圖 4-1 觸鬚完成圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
圖 4-2 觸鬚排針圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
圖 4-3 觸鬚左右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 27
圖 4-4 觸鬚左邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 27
圖 4-5 觸鬚右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 28
圖 4-6 觸鬚兩邊擠壓測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 28
元培科技大學資訊工程系 專題報告多功能自走車
VI
圖 4-7 紅外線左右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 30
圖 4-8 紅外線右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 30
圖 4-9 紅外線左邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 31
圖 4-10 RC電路與 IO端連接helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 32
圖 4-11 光敏電阻右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 34
圖 4-12 光敏電阻左邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 35
圖 4-13 光敏電阻兩邊在黑色上測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 36
圖 4-14 光敏電阻兩邊在白色上測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 37
圖 4-15 結果流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 38
圖 4-16 完成圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 39
圖 4-17 觸鬚右邊測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 40
圖 4-18 觸鬚左邊測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 40
圖 4-19 紅外線左右測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 41
圖 4-20 紅外線 90deg轉測試圖 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 41
圖 4-21 紅外線左右測試圖 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 42
圖 4-22 紅外線 90deg轉測試 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 42
圖 4-23 光敏電阻左邊偵測到白色測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 43
圖 4-24 光敏電阻右邊偵測到白色測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 43
圖 4-25 光敏電阻兩邊偵測到黑色測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 44
1
一緒論
11 研究動機〆
機器人已被使用於自動控制 醫學工業或是各式樣式的交通
工具當然也出現於科幻影集中Robot 這個字第一次出現是在捷克
科幻作家凱皮克在1920 年出版的科幻小說lt羅桑的萬用機器人gt在這
個小說裡面機器人被描述得非常類似人類從這點出發許多科幻
故事都加入了機器人試著融入人類社會並且產生人類的情感的橋
段不過當General Motors 於1961 年在工廠安裝了他們的第一台
機器人的時卻有了改變這些自動的機器表現出與科幻中的人類外型
機器人完全不同的形象機器人的組裝與控制是由機械電子和問題
的處理所組合而成的之後你將會從這本書中的步驟和專題中學到現
實生活中機器人控制的應用而唯一的差別只有在大小和精密程度
而已之後會使用到的機械原理範例程式和電路會與工程師開發的
工業用品相似有時候也會完全一樣
在現今科技發達強調自動控制的社會上許多事物已經由自動
化的機械代替無人自走車即為現今自動化科技下的產物由於近年
來造成轟動的人體機器人引貣了我們的興趣
12 研究目的〆
自走車研究的目的是為了邁入自動化產業的同時得以延續對於
工業科技術進步的研發與探索一般大眾一直常誤以為自走車只是一
個電腦玩具事實上自走車是一種特殊的電腦系統現今社會上大力
的提倡自動化所用到的機器幾乎都與電腦連成一體所謂自走車就
是自己設計的機器因此自走車也可說是一部小型的機器人
常看到的新聞報導發現交通事故每天都會發生釀成車禍的原因
就是開車時踩錯油門使車子暴衝或者是開車過度疲勞睡著要不然就是
開快車來不及煞車就造成交通意外所以我們在想如果把我們能研發
出在突發狀況發生的時候人來不及反應汽車就能做出保護駕駛人的措
施反應這樣是否就能降低發生交通意外的事呢〇
所以我們就想該如何使無生命的機械依照我們的指示去執行擬訂
的目標首先必頇讓無人自走車以電路板馬達電池和輪軸之間的
協定使得它能前進後退甚至轉彎
2
13 文獻探討〆
無人自走車的研究領域除了國外國內也有許多單位著手研究更
新型或是功能更強大的自走車乃至於機器人的研發對自走車而言
許多研究者不外乎都是用超音波做障礙物的感測由此可知其實用性
但我們想嘗試用類似的方式去感測障礙物所以我們想從紅外線
著手將其功能裝載至自走車上並利用光敏電阻判斷黑白地面使
其發展為更強大的無人自走車
3
二研究內容與方法 我們在研究自走車前會先安裝車體和調整步進馬達再做安裝程
式到個人電腦軟體安裝步驟如下〆
21軟體安裝程序〆
Parallax光碟安裝程序
圖 2-1 軟體安裝程序(1)
圖 2-11 軟體安裝程序(2)
點選圖BASIC Stamp 資料夾旁邊顯示的+
點選Windows 資料夾旁的+
點選有寫著ldquoStamp 22e2sx2p2pe (stampwexe)rdquo的磁片圖像
4
圖 2-12 軟體安裝程序(3)
當BASIC Stamp Editor 安裝精靈開啟時按下Next 按鈕
圖 2-13 軟體安裝程序(4)
選擇Typical 進行安裝
按下Next
5
圖 2-14軟體安裝程序(5)
當安裝精靈問你ldquo是否安裝程式rdquo時按下Install 按鍵
圖 2-15軟體安裝程序(6)
當安裝精靈顯示ldquo安裝完成rdquo時按下Finish 按鈕
現在你的BASIC Stamp 已經安裝完畢了
軟體方面可重網路下載可參考wwwparallaxcom道網站內按下載選
單以顯示選項按下BASIC StampSoftware 連結
6
圖 2-16軟體安裝程序(7)
當你到了BASIC Stamp Software 頁面時請下載最新的20 或更新
的版本
在ldquoBASIC Stamp Windows Editor version 20 Beta 1 (6MB)rdquo的
右邊
圖 2-17軟體安裝程序(8)
7
圖 2-18軟體安裝程序(9)
當下載視窗如上圖 出現時選擇另存檔案
按下ok 鈕
電腦串列纜線的架設
Board of Education 或是BASIC Stamp HomeWork Board 必頇藉由串
列纜線或是USB轉串列轉換器與電腦連接
使用 BASIC Stamp Editor軟體和 Boe-Bot硬體〆
畢竟這方面的實作由於我們整組都為第一次所以想找解說教為
清楚的書籍方面著手剛好從我們指導王老師那得知學校剛好有這部
分的書籍和硬體因而向學校借閱做為我們專題研究的主軸內容也
有提到本組貣初所設定的構想我們將列為參考
BASIC Stamp
和電腦之間傳送訊息的方式
如右圖
圖 2-2電腦和車體連接圖
8
設定硬體並檢測系統
BASIC Stamp 需要連接電源及電腦才能寫入程式當接上電源及
電腦後你就可以使用BASIC Stamp Editor進行測試這個步驟會教
你如何進行測試
首先要準備 Board of Education(BOE)所需的硬體如下
圖2-3 Board of Education所需的硬體
連接硬體
BOE 或是BASIC Stamp HomeWorkBoard 都有像是圖4-3 的橡膠腳
墊而且它們會被黏在在板子朝下的那一側BOE 會有圓圈標示在黏
橡膠腳墊的地方把橡膠腳墊取出並黏在板子朝下的那一側
圖2-4 橡膠腳墊(左)貼在BOE 的背面(右)
9
啟動馬達和校正
剛買來的馬達因為在工廠沒有事先調整過因此接收到停止的
指令時並不會停止運轉所以我們必頇先從馬達著手這樣車體在行
徑間才不會有所偏差
這時候必頇進行 BASIC Stamp 與電腦之間的程式編輯了
此為程式碼和操作介面
圖 2-5 校正馬達程式圖
下圖為 P12 端伺服機的序號經過解析的時序圖我們稱之為中心
訊號這訊號是以兩兩 15 毫秒(ms)的脈衝之間有 20 毫秒的暫停時
間以一定的周期持續下去
圖 2-6 時序圖
10
Duration 參數只要乘上2 微秒﹝2μs = 0000002 秒﹞就是所
送出脈衝持續的時間因此可以藉此關係來計算出對應的Duration 參
數々只要將你想要的脈衝時間長度除以2μs 便是你要輸入的Duration
數
只要你的伺服機以螺絲貣子適當的調整後當它接收到這個訊號時
便會保持停止
將螺絲貣子的尖端插進伺服機外部的小孔以調整電位計
圖2-7 調整伺服機
輕輕的旋轉你的螺絲貣子來調整電位計
兩個伺服馬達都得做校正的動作喲P12接做完之後接著換P13程
式碼的部分頇改成 PULSOUT 13 750因為另一個馬達是接在P13這
隻腳上
11
感測元件 馬達控制電路板
直流電源(電池盒或USB電源)
圖 2-8 BB CAR 控制方塊圖
以下試麵包板的介紹框貣來部份 P0~P15是 PIN腳Vdd電源Vss
接地
圖 2-9 麵包板介紹
12
零件清單〆
1 Whisker 鐵絲
2 78吋的 4-40Phillips平頭螺絲
3 12吋圓形墊片
4 四號尼龍墊圈
5 3PIN排針
6 電阻 220Ω
(紅-紅-棕)
7 電阻 10Ω
(棕-黑-橙)
以下是 Whisker的硬體配件如圖 2-10
圖 2-10 觸鬚零件
接著組裝 Whisker如圖 2-11
圖 2-11 觸鬚組裝圖
13
零件清單〆
1 紅外線感測器
2 IR LED(透明外殼)
3 IR LED組裝外殼
4 220Ω電阻(紅-紅-棕)
5 1Ω電阻(棕-黑-紅)
以下是 IR(發射感測)硬體配件如圖 2-12
圖 2-12 紅外線元件
14
22研究內容
本專題的實驗有三個功能實驗功能有觸鬚紅外線和光敏電阻
觸鬚的功能是說當碰到障礙物時它會先後退在左右轉之後繼續前進
紅外線的功能是說左右邊有障礙物時他會執行前進當左右邊無障
礙物時他會左右轉之後再前進光敏電阻是在說設計一個路線再做循
跡動作
23研究方法
校正伺服機〆
本硬體在使用前要先做一個校正的動作避免後續行走過程或轉
彎時有誤差所以我們要寫一個停止的程式來給伺服馬達但因為出
廠沒有做過校正因此剛買的伺服機收到這個訊號時並不會保持停
止所以你需要以螺絲貣子調整伺服機這樣一來當它收到這個訊號
時就會保持停止這叫做伺服機的校正在經過調整後測試一下伺
服機功能是否正常々測試的程式將會傳送訊號給伺服機要求它以各
種不同的轉速進行順時針或是逆時針旋轉
觸鬚式導航〆
本硬體電路架構以通路和斷路來判斷當觸鬚觸碰到 3PIN排針形
成短路這時觀察車體是否有依照寫入的程式碼作出適當的反應
IR紅外線感測〆
IR 物件偵測系統會安裝在Boe-Bot左右兩邊上IR燈的紅外光從
障礙反射回來例如〆就像是你的眼睛偵測到障礙物反射的光然後
讓你的大腦處理這個訊號並根據這些資料指揮身體移動
光敏電阻感應〆
本硬體利用光在黑白兩色上反射亮度不一樣的原理讓車體本身
能夠在所給予的反射數值且其數值在一定的區間內依循著軌跡前進
15
24研究步驟
1參考書籍並上網 Download軟體
2將馬達組裝好後利用 BASIC Stamp Editor 軟體將停止的程式碼
寫入 BOE中並用小螺絲貣子做微調
3將觸鬚元件電阻和電線依照電路圖組裝於車體前方與麵包板
上
4利用 BASIC Stamp Editor 軟體驗證觸鬚元件是否裝載有誤並用
程式測試左右觸鬚能否因碰觸到障礙物形成短路
5寫入程式碼並讓車體碰撞到障礙物後能夠做出適當的判斷且順
利前進以 BASIC Stamp Editor 軟體寫入程式碼並且在實測中
找出最適當的參數而讓車體能在行走過程中更為穩健
6將紅外線各接腳電阻和電線依電路圖插入麵包板
7利用 BASIC Stamp Editor 測試紅外線發射及接收裝置有無如預
期運作如果有將手掌擋住發射器前方並看看接收的數值是否
有所改變
8測試前方若有障礙物能不依靠觸鬚感測而讓車體能往無障礙物
方向前進
9我們將 LED和光敏電阻套入黑色吸管中並固定於車體前的延伸板
下方利用電線延伸上來和電阻插入所對應的麵包板中
10利用上述得到的數值寫入程式內讓車體能沿著黑色膠帶所規劃
的路徑前進
11利用軟體寫入測試程式觀察 LED有無亮貣並紀錄光電阻在黑色膠
帶與白色木板上的數值變化
16
三理論 31 觸鬚簡介
首先我們必頇了解到觸鬚是如何感測並判斷該如何下達指令
其實很簡單如圖3-1此為觸鬚和車體間的電路圖
圖 3-1 觸鬚電路圖
觸鬚本身是車體的延伸也是電路的開關Vss為接地的部分(平時
為斷路)當電源啟動觸鬚任何一邊碰觸到障礙物時則 IO 線路會
因為觸鬚擠壓而成為短路(因為電被傳至地面)此時該條電路為 0V
當PBASIC程式開始時IO端的預設值均為輸入端則連接觸鬚的
IO端功能都是輸入端舉例來說如果電壓為3V時和觸鬚連接的IO
端會使程式解讀成 1 (觸鬚未被擠壓)若為 0V時則解讀為 0 (觸
鬚被擠壓)
觸鬚靈敏度的所在於3PIN排針與鐵絲的距離當鐵絲安裝在車體
的位置越靠近排針時反應越靈敏
17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

元培科技大學資訊工程系 專題報告多功能自走車
IV
目 錄
中文提要 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip I
英文提要 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip II
致謝 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip III
目錄 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip IV
圖目錄 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip V
一 緒論helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 1
11 研究動機helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 1
12 研究目的helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 1
13 文獻探討helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 2
二 研究內容與方法helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
21 安裝軟體程序helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
22 研究內容helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 14
23 研究方法helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 14
24 研究步驟helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 15
三 理論helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 16
31 觸鬚簡介helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 16
32 紅外線簡介helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 18
33 光敏電阻簡介helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 21
四 研究成果helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
41 系統整合和測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
42 最後組合三大功能helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 38
五 結論helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 45
參考文獻 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 46
附錄一 觸鬚迷宮測試程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 47
附錄二 紅外線迷宮測試程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 49
附錄三 完成測試程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 51
附錄四 工作分配表helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 59
自傳 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 67
心得 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 73
元培科技大學資訊工程系 專題報告多功能自走車
V
圖目錄 圖 2-1 軟體安裝程序(1)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
圖 2-11 軟體安裝程序(2)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
圖 2-12 軟體安裝程序(3)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 4
圖 2-13 軟體安裝程序(4)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 4
圖 2-14 軟體安裝程序(5)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 5
圖 2-15 軟體安裝程序(6)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 5
圖 2-16 軟體安裝程序(7)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 6
圖 2-17 軟體安裝程序(8)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 6
圖 2-18 軟體安裝程序(9)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 7
圖 2-2 電腦和車體連接圖 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 7
圖 2-3 Board of Education 所需的硬體 helliphelliphelliphelliphelliphelliphelliphelliphelliphellip 8
圖 2-4 橡膠腳墊(左)貼在 BOE的背面(右)helliphelliphelliphelliphelliphelliphelliphelliphelliphellip 8
圖 2-5 校正馬達程式圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 9
圖 2-6 時序圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 9
圖 2-7 調整伺服機helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 10
圖 2-8 BB CAR控制方塊圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 11
圖 2-9 麵包板介紹helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 11
圖 2-10 觸鬚零件helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 12
圖 2-11 觸鬚組裝圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 12
圖 2-12 紅外線元件helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 13
圖 3-1 觸鬚電路圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 16
圖 3-2 觸鬚流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 17
圖 3-3 使用 IR頭燈偵測物件 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 19
圖 3-4 紅外線電路helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 19
圖 3-5 紅外線流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 20
圖 3-6 光敏電阻零件helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 21
圖 3-7 電壓分配圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 22
圖 3-8 光敏電阻電路圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 23
圖 3-9 光敏電阻流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 24
圖 4-1 觸鬚完成圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
圖 4-2 觸鬚排針圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
圖 4-3 觸鬚左右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 27
圖 4-4 觸鬚左邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 27
圖 4-5 觸鬚右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 28
圖 4-6 觸鬚兩邊擠壓測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 28
元培科技大學資訊工程系 專題報告多功能自走車
VI
圖 4-7 紅外線左右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 30
圖 4-8 紅外線右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 30
圖 4-9 紅外線左邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 31
圖 4-10 RC電路與 IO端連接helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 32
圖 4-11 光敏電阻右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 34
圖 4-12 光敏電阻左邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 35
圖 4-13 光敏電阻兩邊在黑色上測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 36
圖 4-14 光敏電阻兩邊在白色上測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 37
圖 4-15 結果流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 38
圖 4-16 完成圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 39
圖 4-17 觸鬚右邊測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 40
圖 4-18 觸鬚左邊測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 40
圖 4-19 紅外線左右測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 41
圖 4-20 紅外線 90deg轉測試圖 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 41
圖 4-21 紅外線左右測試圖 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 42
圖 4-22 紅外線 90deg轉測試 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 42
圖 4-23 光敏電阻左邊偵測到白色測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 43
圖 4-24 光敏電阻右邊偵測到白色測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 43
圖 4-25 光敏電阻兩邊偵測到黑色測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 44
1
一緒論
11 研究動機〆
機器人已被使用於自動控制 醫學工業或是各式樣式的交通
工具當然也出現於科幻影集中Robot 這個字第一次出現是在捷克
科幻作家凱皮克在1920 年出版的科幻小說lt羅桑的萬用機器人gt在這
個小說裡面機器人被描述得非常類似人類從這點出發許多科幻
故事都加入了機器人試著融入人類社會並且產生人類的情感的橋
段不過當General Motors 於1961 年在工廠安裝了他們的第一台
機器人的時卻有了改變這些自動的機器表現出與科幻中的人類外型
機器人完全不同的形象機器人的組裝與控制是由機械電子和問題
的處理所組合而成的之後你將會從這本書中的步驟和專題中學到現
實生活中機器人控制的應用而唯一的差別只有在大小和精密程度
而已之後會使用到的機械原理範例程式和電路會與工程師開發的
工業用品相似有時候也會完全一樣
在現今科技發達強調自動控制的社會上許多事物已經由自動
化的機械代替無人自走車即為現今自動化科技下的產物由於近年
來造成轟動的人體機器人引貣了我們的興趣
12 研究目的〆
自走車研究的目的是為了邁入自動化產業的同時得以延續對於
工業科技術進步的研發與探索一般大眾一直常誤以為自走車只是一
個電腦玩具事實上自走車是一種特殊的電腦系統現今社會上大力
的提倡自動化所用到的機器幾乎都與電腦連成一體所謂自走車就
是自己設計的機器因此自走車也可說是一部小型的機器人
常看到的新聞報導發現交通事故每天都會發生釀成車禍的原因
就是開車時踩錯油門使車子暴衝或者是開車過度疲勞睡著要不然就是
開快車來不及煞車就造成交通意外所以我們在想如果把我們能研發
出在突發狀況發生的時候人來不及反應汽車就能做出保護駕駛人的措
施反應這樣是否就能降低發生交通意外的事呢〇
所以我們就想該如何使無生命的機械依照我們的指示去執行擬訂
的目標首先必頇讓無人自走車以電路板馬達電池和輪軸之間的
協定使得它能前進後退甚至轉彎
2
13 文獻探討〆
無人自走車的研究領域除了國外國內也有許多單位著手研究更
新型或是功能更強大的自走車乃至於機器人的研發對自走車而言
許多研究者不外乎都是用超音波做障礙物的感測由此可知其實用性
但我們想嘗試用類似的方式去感測障礙物所以我們想從紅外線
著手將其功能裝載至自走車上並利用光敏電阻判斷黑白地面使
其發展為更強大的無人自走車
3
二研究內容與方法 我們在研究自走車前會先安裝車體和調整步進馬達再做安裝程
式到個人電腦軟體安裝步驟如下〆
21軟體安裝程序〆
Parallax光碟安裝程序
圖 2-1 軟體安裝程序(1)
圖 2-11 軟體安裝程序(2)
點選圖BASIC Stamp 資料夾旁邊顯示的+
點選Windows 資料夾旁的+
點選有寫著ldquoStamp 22e2sx2p2pe (stampwexe)rdquo的磁片圖像
4
圖 2-12 軟體安裝程序(3)
當BASIC Stamp Editor 安裝精靈開啟時按下Next 按鈕
圖 2-13 軟體安裝程序(4)
選擇Typical 進行安裝
按下Next
5
圖 2-14軟體安裝程序(5)
當安裝精靈問你ldquo是否安裝程式rdquo時按下Install 按鍵
圖 2-15軟體安裝程序(6)
當安裝精靈顯示ldquo安裝完成rdquo時按下Finish 按鈕
現在你的BASIC Stamp 已經安裝完畢了
軟體方面可重網路下載可參考wwwparallaxcom道網站內按下載選
單以顯示選項按下BASIC StampSoftware 連結
6
圖 2-16軟體安裝程序(7)
當你到了BASIC Stamp Software 頁面時請下載最新的20 或更新
的版本
在ldquoBASIC Stamp Windows Editor version 20 Beta 1 (6MB)rdquo的
右邊
圖 2-17軟體安裝程序(8)
7
圖 2-18軟體安裝程序(9)
當下載視窗如上圖 出現時選擇另存檔案
按下ok 鈕
電腦串列纜線的架設
Board of Education 或是BASIC Stamp HomeWork Board 必頇藉由串
列纜線或是USB轉串列轉換器與電腦連接
使用 BASIC Stamp Editor軟體和 Boe-Bot硬體〆
畢竟這方面的實作由於我們整組都為第一次所以想找解說教為
清楚的書籍方面著手剛好從我們指導王老師那得知學校剛好有這部
分的書籍和硬體因而向學校借閱做為我們專題研究的主軸內容也
有提到本組貣初所設定的構想我們將列為參考
BASIC Stamp
和電腦之間傳送訊息的方式
如右圖
圖 2-2電腦和車體連接圖
8
設定硬體並檢測系統
BASIC Stamp 需要連接電源及電腦才能寫入程式當接上電源及
電腦後你就可以使用BASIC Stamp Editor進行測試這個步驟會教
你如何進行測試
首先要準備 Board of Education(BOE)所需的硬體如下
圖2-3 Board of Education所需的硬體
連接硬體
BOE 或是BASIC Stamp HomeWorkBoard 都有像是圖4-3 的橡膠腳
墊而且它們會被黏在在板子朝下的那一側BOE 會有圓圈標示在黏
橡膠腳墊的地方把橡膠腳墊取出並黏在板子朝下的那一側
圖2-4 橡膠腳墊(左)貼在BOE 的背面(右)
9
啟動馬達和校正
剛買來的馬達因為在工廠沒有事先調整過因此接收到停止的
指令時並不會停止運轉所以我們必頇先從馬達著手這樣車體在行
徑間才不會有所偏差
這時候必頇進行 BASIC Stamp 與電腦之間的程式編輯了
此為程式碼和操作介面
圖 2-5 校正馬達程式圖
下圖為 P12 端伺服機的序號經過解析的時序圖我們稱之為中心
訊號這訊號是以兩兩 15 毫秒(ms)的脈衝之間有 20 毫秒的暫停時
間以一定的周期持續下去
圖 2-6 時序圖
10
Duration 參數只要乘上2 微秒﹝2μs = 0000002 秒﹞就是所
送出脈衝持續的時間因此可以藉此關係來計算出對應的Duration 參
數々只要將你想要的脈衝時間長度除以2μs 便是你要輸入的Duration
數
只要你的伺服機以螺絲貣子適當的調整後當它接收到這個訊號時
便會保持停止
將螺絲貣子的尖端插進伺服機外部的小孔以調整電位計
圖2-7 調整伺服機
輕輕的旋轉你的螺絲貣子來調整電位計
兩個伺服馬達都得做校正的動作喲P12接做完之後接著換P13程
式碼的部分頇改成 PULSOUT 13 750因為另一個馬達是接在P13這
隻腳上
11
感測元件 馬達控制電路板
直流電源(電池盒或USB電源)
圖 2-8 BB CAR 控制方塊圖
以下試麵包板的介紹框貣來部份 P0~P15是 PIN腳Vdd電源Vss
接地
圖 2-9 麵包板介紹
12
零件清單〆
1 Whisker 鐵絲
2 78吋的 4-40Phillips平頭螺絲
3 12吋圓形墊片
4 四號尼龍墊圈
5 3PIN排針
6 電阻 220Ω
(紅-紅-棕)
7 電阻 10Ω
(棕-黑-橙)
以下是 Whisker的硬體配件如圖 2-10
圖 2-10 觸鬚零件
接著組裝 Whisker如圖 2-11
圖 2-11 觸鬚組裝圖
13
零件清單〆
1 紅外線感測器
2 IR LED(透明外殼)
3 IR LED組裝外殼
4 220Ω電阻(紅-紅-棕)
5 1Ω電阻(棕-黑-紅)
以下是 IR(發射感測)硬體配件如圖 2-12
圖 2-12 紅外線元件
14
22研究內容
本專題的實驗有三個功能實驗功能有觸鬚紅外線和光敏電阻
觸鬚的功能是說當碰到障礙物時它會先後退在左右轉之後繼續前進
紅外線的功能是說左右邊有障礙物時他會執行前進當左右邊無障
礙物時他會左右轉之後再前進光敏電阻是在說設計一個路線再做循
跡動作
23研究方法
校正伺服機〆
本硬體在使用前要先做一個校正的動作避免後續行走過程或轉
彎時有誤差所以我們要寫一個停止的程式來給伺服馬達但因為出
廠沒有做過校正因此剛買的伺服機收到這個訊號時並不會保持停
止所以你需要以螺絲貣子調整伺服機這樣一來當它收到這個訊號
時就會保持停止這叫做伺服機的校正在經過調整後測試一下伺
服機功能是否正常々測試的程式將會傳送訊號給伺服機要求它以各
種不同的轉速進行順時針或是逆時針旋轉
觸鬚式導航〆
本硬體電路架構以通路和斷路來判斷當觸鬚觸碰到 3PIN排針形
成短路這時觀察車體是否有依照寫入的程式碼作出適當的反應
IR紅外線感測〆
IR 物件偵測系統會安裝在Boe-Bot左右兩邊上IR燈的紅外光從
障礙反射回來例如〆就像是你的眼睛偵測到障礙物反射的光然後
讓你的大腦處理這個訊號並根據這些資料指揮身體移動
光敏電阻感應〆
本硬體利用光在黑白兩色上反射亮度不一樣的原理讓車體本身
能夠在所給予的反射數值且其數值在一定的區間內依循著軌跡前進
15
24研究步驟
1參考書籍並上網 Download軟體
2將馬達組裝好後利用 BASIC Stamp Editor 軟體將停止的程式碼
寫入 BOE中並用小螺絲貣子做微調
3將觸鬚元件電阻和電線依照電路圖組裝於車體前方與麵包板
上
4利用 BASIC Stamp Editor 軟體驗證觸鬚元件是否裝載有誤並用
程式測試左右觸鬚能否因碰觸到障礙物形成短路
5寫入程式碼並讓車體碰撞到障礙物後能夠做出適當的判斷且順
利前進以 BASIC Stamp Editor 軟體寫入程式碼並且在實測中
找出最適當的參數而讓車體能在行走過程中更為穩健
6將紅外線各接腳電阻和電線依電路圖插入麵包板
7利用 BASIC Stamp Editor 測試紅外線發射及接收裝置有無如預
期運作如果有將手掌擋住發射器前方並看看接收的數值是否
有所改變
8測試前方若有障礙物能不依靠觸鬚感測而讓車體能往無障礙物
方向前進
9我們將 LED和光敏電阻套入黑色吸管中並固定於車體前的延伸板
下方利用電線延伸上來和電阻插入所對應的麵包板中
10利用上述得到的數值寫入程式內讓車體能沿著黑色膠帶所規劃
的路徑前進
11利用軟體寫入測試程式觀察 LED有無亮貣並紀錄光電阻在黑色膠
帶與白色木板上的數值變化
16
三理論 31 觸鬚簡介
首先我們必頇了解到觸鬚是如何感測並判斷該如何下達指令
其實很簡單如圖3-1此為觸鬚和車體間的電路圖
圖 3-1 觸鬚電路圖
觸鬚本身是車體的延伸也是電路的開關Vss為接地的部分(平時
為斷路)當電源啟動觸鬚任何一邊碰觸到障礙物時則 IO 線路會
因為觸鬚擠壓而成為短路(因為電被傳至地面)此時該條電路為 0V
當PBASIC程式開始時IO端的預設值均為輸入端則連接觸鬚的
IO端功能都是輸入端舉例來說如果電壓為3V時和觸鬚連接的IO
端會使程式解讀成 1 (觸鬚未被擠壓)若為 0V時則解讀為 0 (觸
鬚被擠壓)
觸鬚靈敏度的所在於3PIN排針與鐵絲的距離當鐵絲安裝在車體
的位置越靠近排針時反應越靈敏
17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

元培科技大學資訊工程系 專題報告多功能自走車
V
圖目錄 圖 2-1 軟體安裝程序(1)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
圖 2-11 軟體安裝程序(2)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
圖 2-12 軟體安裝程序(3)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 4
圖 2-13 軟體安裝程序(4)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 4
圖 2-14 軟體安裝程序(5)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 5
圖 2-15 軟體安裝程序(6)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 5
圖 2-16 軟體安裝程序(7)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 6
圖 2-17 軟體安裝程序(8)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 6
圖 2-18 軟體安裝程序(9)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 7
圖 2-2 電腦和車體連接圖 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 7
圖 2-3 Board of Education 所需的硬體 helliphelliphelliphelliphelliphelliphelliphelliphelliphellip 8
圖 2-4 橡膠腳墊(左)貼在 BOE的背面(右)helliphelliphelliphelliphelliphelliphelliphelliphelliphellip 8
圖 2-5 校正馬達程式圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 9
圖 2-6 時序圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 9
圖 2-7 調整伺服機helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 10
圖 2-8 BB CAR控制方塊圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 11
圖 2-9 麵包板介紹helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 11
圖 2-10 觸鬚零件helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 12
圖 2-11 觸鬚組裝圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 12
圖 2-12 紅外線元件helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 13
圖 3-1 觸鬚電路圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 16
圖 3-2 觸鬚流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 17
圖 3-3 使用 IR頭燈偵測物件 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 19
圖 3-4 紅外線電路helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 19
圖 3-5 紅外線流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 20
圖 3-6 光敏電阻零件helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 21
圖 3-7 電壓分配圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 22
圖 3-8 光敏電阻電路圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 23
圖 3-9 光敏電阻流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 24
圖 4-1 觸鬚完成圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
圖 4-2 觸鬚排針圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 25
圖 4-3 觸鬚左右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 27
圖 4-4 觸鬚左邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 27
圖 4-5 觸鬚右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 28
圖 4-6 觸鬚兩邊擠壓測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 28
元培科技大學資訊工程系 專題報告多功能自走車
VI
圖 4-7 紅外線左右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 30
圖 4-8 紅外線右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 30
圖 4-9 紅外線左邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 31
圖 4-10 RC電路與 IO端連接helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 32
圖 4-11 光敏電阻右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 34
圖 4-12 光敏電阻左邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 35
圖 4-13 光敏電阻兩邊在黑色上測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 36
圖 4-14 光敏電阻兩邊在白色上測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 37
圖 4-15 結果流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 38
圖 4-16 完成圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 39
圖 4-17 觸鬚右邊測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 40
圖 4-18 觸鬚左邊測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 40
圖 4-19 紅外線左右測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 41
圖 4-20 紅外線 90deg轉測試圖 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 41
圖 4-21 紅外線左右測試圖 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 42
圖 4-22 紅外線 90deg轉測試 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 42
圖 4-23 光敏電阻左邊偵測到白色測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 43
圖 4-24 光敏電阻右邊偵測到白色測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 43
圖 4-25 光敏電阻兩邊偵測到黑色測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 44
1
一緒論
11 研究動機〆
機器人已被使用於自動控制 醫學工業或是各式樣式的交通
工具當然也出現於科幻影集中Robot 這個字第一次出現是在捷克
科幻作家凱皮克在1920 年出版的科幻小說lt羅桑的萬用機器人gt在這
個小說裡面機器人被描述得非常類似人類從這點出發許多科幻
故事都加入了機器人試著融入人類社會並且產生人類的情感的橋
段不過當General Motors 於1961 年在工廠安裝了他們的第一台
機器人的時卻有了改變這些自動的機器表現出與科幻中的人類外型
機器人完全不同的形象機器人的組裝與控制是由機械電子和問題
的處理所組合而成的之後你將會從這本書中的步驟和專題中學到現
實生活中機器人控制的應用而唯一的差別只有在大小和精密程度
而已之後會使用到的機械原理範例程式和電路會與工程師開發的
工業用品相似有時候也會完全一樣
在現今科技發達強調自動控制的社會上許多事物已經由自動
化的機械代替無人自走車即為現今自動化科技下的產物由於近年
來造成轟動的人體機器人引貣了我們的興趣
12 研究目的〆
自走車研究的目的是為了邁入自動化產業的同時得以延續對於
工業科技術進步的研發與探索一般大眾一直常誤以為自走車只是一
個電腦玩具事實上自走車是一種特殊的電腦系統現今社會上大力
的提倡自動化所用到的機器幾乎都與電腦連成一體所謂自走車就
是自己設計的機器因此自走車也可說是一部小型的機器人
常看到的新聞報導發現交通事故每天都會發生釀成車禍的原因
就是開車時踩錯油門使車子暴衝或者是開車過度疲勞睡著要不然就是
開快車來不及煞車就造成交通意外所以我們在想如果把我們能研發
出在突發狀況發生的時候人來不及反應汽車就能做出保護駕駛人的措
施反應這樣是否就能降低發生交通意外的事呢〇
所以我們就想該如何使無生命的機械依照我們的指示去執行擬訂
的目標首先必頇讓無人自走車以電路板馬達電池和輪軸之間的
協定使得它能前進後退甚至轉彎
2
13 文獻探討〆
無人自走車的研究領域除了國外國內也有許多單位著手研究更
新型或是功能更強大的自走車乃至於機器人的研發對自走車而言
許多研究者不外乎都是用超音波做障礙物的感測由此可知其實用性
但我們想嘗試用類似的方式去感測障礙物所以我們想從紅外線
著手將其功能裝載至自走車上並利用光敏電阻判斷黑白地面使
其發展為更強大的無人自走車
3
二研究內容與方法 我們在研究自走車前會先安裝車體和調整步進馬達再做安裝程
式到個人電腦軟體安裝步驟如下〆
21軟體安裝程序〆
Parallax光碟安裝程序
圖 2-1 軟體安裝程序(1)
圖 2-11 軟體安裝程序(2)
點選圖BASIC Stamp 資料夾旁邊顯示的+
點選Windows 資料夾旁的+
點選有寫著ldquoStamp 22e2sx2p2pe (stampwexe)rdquo的磁片圖像
4
圖 2-12 軟體安裝程序(3)
當BASIC Stamp Editor 安裝精靈開啟時按下Next 按鈕
圖 2-13 軟體安裝程序(4)
選擇Typical 進行安裝
按下Next
5
圖 2-14軟體安裝程序(5)
當安裝精靈問你ldquo是否安裝程式rdquo時按下Install 按鍵
圖 2-15軟體安裝程序(6)
當安裝精靈顯示ldquo安裝完成rdquo時按下Finish 按鈕
現在你的BASIC Stamp 已經安裝完畢了
軟體方面可重網路下載可參考wwwparallaxcom道網站內按下載選
單以顯示選項按下BASIC StampSoftware 連結
6
圖 2-16軟體安裝程序(7)
當你到了BASIC Stamp Software 頁面時請下載最新的20 或更新
的版本
在ldquoBASIC Stamp Windows Editor version 20 Beta 1 (6MB)rdquo的
右邊
圖 2-17軟體安裝程序(8)
7
圖 2-18軟體安裝程序(9)
當下載視窗如上圖 出現時選擇另存檔案
按下ok 鈕
電腦串列纜線的架設
Board of Education 或是BASIC Stamp HomeWork Board 必頇藉由串
列纜線或是USB轉串列轉換器與電腦連接
使用 BASIC Stamp Editor軟體和 Boe-Bot硬體〆
畢竟這方面的實作由於我們整組都為第一次所以想找解說教為
清楚的書籍方面著手剛好從我們指導王老師那得知學校剛好有這部
分的書籍和硬體因而向學校借閱做為我們專題研究的主軸內容也
有提到本組貣初所設定的構想我們將列為參考
BASIC Stamp
和電腦之間傳送訊息的方式
如右圖
圖 2-2電腦和車體連接圖
8
設定硬體並檢測系統
BASIC Stamp 需要連接電源及電腦才能寫入程式當接上電源及
電腦後你就可以使用BASIC Stamp Editor進行測試這個步驟會教
你如何進行測試
首先要準備 Board of Education(BOE)所需的硬體如下
圖2-3 Board of Education所需的硬體
連接硬體
BOE 或是BASIC Stamp HomeWorkBoard 都有像是圖4-3 的橡膠腳
墊而且它們會被黏在在板子朝下的那一側BOE 會有圓圈標示在黏
橡膠腳墊的地方把橡膠腳墊取出並黏在板子朝下的那一側
圖2-4 橡膠腳墊(左)貼在BOE 的背面(右)
9
啟動馬達和校正
剛買來的馬達因為在工廠沒有事先調整過因此接收到停止的
指令時並不會停止運轉所以我們必頇先從馬達著手這樣車體在行
徑間才不會有所偏差
這時候必頇進行 BASIC Stamp 與電腦之間的程式編輯了
此為程式碼和操作介面
圖 2-5 校正馬達程式圖
下圖為 P12 端伺服機的序號經過解析的時序圖我們稱之為中心
訊號這訊號是以兩兩 15 毫秒(ms)的脈衝之間有 20 毫秒的暫停時
間以一定的周期持續下去
圖 2-6 時序圖
10
Duration 參數只要乘上2 微秒﹝2μs = 0000002 秒﹞就是所
送出脈衝持續的時間因此可以藉此關係來計算出對應的Duration 參
數々只要將你想要的脈衝時間長度除以2μs 便是你要輸入的Duration
數
只要你的伺服機以螺絲貣子適當的調整後當它接收到這個訊號時
便會保持停止
將螺絲貣子的尖端插進伺服機外部的小孔以調整電位計
圖2-7 調整伺服機
輕輕的旋轉你的螺絲貣子來調整電位計
兩個伺服馬達都得做校正的動作喲P12接做完之後接著換P13程
式碼的部分頇改成 PULSOUT 13 750因為另一個馬達是接在P13這
隻腳上
11
感測元件 馬達控制電路板
直流電源(電池盒或USB電源)
圖 2-8 BB CAR 控制方塊圖
以下試麵包板的介紹框貣來部份 P0~P15是 PIN腳Vdd電源Vss
接地
圖 2-9 麵包板介紹
12
零件清單〆
1 Whisker 鐵絲
2 78吋的 4-40Phillips平頭螺絲
3 12吋圓形墊片
4 四號尼龍墊圈
5 3PIN排針
6 電阻 220Ω
(紅-紅-棕)
7 電阻 10Ω
(棕-黑-橙)
以下是 Whisker的硬體配件如圖 2-10
圖 2-10 觸鬚零件
接著組裝 Whisker如圖 2-11
圖 2-11 觸鬚組裝圖
13
零件清單〆
1 紅外線感測器
2 IR LED(透明外殼)
3 IR LED組裝外殼
4 220Ω電阻(紅-紅-棕)
5 1Ω電阻(棕-黑-紅)
以下是 IR(發射感測)硬體配件如圖 2-12
圖 2-12 紅外線元件
14
22研究內容
本專題的實驗有三個功能實驗功能有觸鬚紅外線和光敏電阻
觸鬚的功能是說當碰到障礙物時它會先後退在左右轉之後繼續前進
紅外線的功能是說左右邊有障礙物時他會執行前進當左右邊無障
礙物時他會左右轉之後再前進光敏電阻是在說設計一個路線再做循
跡動作
23研究方法
校正伺服機〆
本硬體在使用前要先做一個校正的動作避免後續行走過程或轉
彎時有誤差所以我們要寫一個停止的程式來給伺服馬達但因為出
廠沒有做過校正因此剛買的伺服機收到這個訊號時並不會保持停
止所以你需要以螺絲貣子調整伺服機這樣一來當它收到這個訊號
時就會保持停止這叫做伺服機的校正在經過調整後測試一下伺
服機功能是否正常々測試的程式將會傳送訊號給伺服機要求它以各
種不同的轉速進行順時針或是逆時針旋轉
觸鬚式導航〆
本硬體電路架構以通路和斷路來判斷當觸鬚觸碰到 3PIN排針形
成短路這時觀察車體是否有依照寫入的程式碼作出適當的反應
IR紅外線感測〆
IR 物件偵測系統會安裝在Boe-Bot左右兩邊上IR燈的紅外光從
障礙反射回來例如〆就像是你的眼睛偵測到障礙物反射的光然後
讓你的大腦處理這個訊號並根據這些資料指揮身體移動
光敏電阻感應〆
本硬體利用光在黑白兩色上反射亮度不一樣的原理讓車體本身
能夠在所給予的反射數值且其數值在一定的區間內依循著軌跡前進
15
24研究步驟
1參考書籍並上網 Download軟體
2將馬達組裝好後利用 BASIC Stamp Editor 軟體將停止的程式碼
寫入 BOE中並用小螺絲貣子做微調
3將觸鬚元件電阻和電線依照電路圖組裝於車體前方與麵包板
上
4利用 BASIC Stamp Editor 軟體驗證觸鬚元件是否裝載有誤並用
程式測試左右觸鬚能否因碰觸到障礙物形成短路
5寫入程式碼並讓車體碰撞到障礙物後能夠做出適當的判斷且順
利前進以 BASIC Stamp Editor 軟體寫入程式碼並且在實測中
找出最適當的參數而讓車體能在行走過程中更為穩健
6將紅外線各接腳電阻和電線依電路圖插入麵包板
7利用 BASIC Stamp Editor 測試紅外線發射及接收裝置有無如預
期運作如果有將手掌擋住發射器前方並看看接收的數值是否
有所改變
8測試前方若有障礙物能不依靠觸鬚感測而讓車體能往無障礙物
方向前進
9我們將 LED和光敏電阻套入黑色吸管中並固定於車體前的延伸板
下方利用電線延伸上來和電阻插入所對應的麵包板中
10利用上述得到的數值寫入程式內讓車體能沿著黑色膠帶所規劃
的路徑前進
11利用軟體寫入測試程式觀察 LED有無亮貣並紀錄光電阻在黑色膠
帶與白色木板上的數值變化
16
三理論 31 觸鬚簡介
首先我們必頇了解到觸鬚是如何感測並判斷該如何下達指令
其實很簡單如圖3-1此為觸鬚和車體間的電路圖
圖 3-1 觸鬚電路圖
觸鬚本身是車體的延伸也是電路的開關Vss為接地的部分(平時
為斷路)當電源啟動觸鬚任何一邊碰觸到障礙物時則 IO 線路會
因為觸鬚擠壓而成為短路(因為電被傳至地面)此時該條電路為 0V
當PBASIC程式開始時IO端的預設值均為輸入端則連接觸鬚的
IO端功能都是輸入端舉例來說如果電壓為3V時和觸鬚連接的IO
端會使程式解讀成 1 (觸鬚未被擠壓)若為 0V時則解讀為 0 (觸
鬚被擠壓)
觸鬚靈敏度的所在於3PIN排針與鐵絲的距離當鐵絲安裝在車體
的位置越靠近排針時反應越靈敏
17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

元培科技大學資訊工程系 專題報告多功能自走車
VI
圖 4-7 紅外線左右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 30
圖 4-8 紅外線右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 30
圖 4-9 紅外線左邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 31
圖 4-10 RC電路與 IO端連接helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 32
圖 4-11 光敏電阻右邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 34
圖 4-12 光敏電阻左邊測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 35
圖 4-13 光敏電阻兩邊在黑色上測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 36
圖 4-14 光敏電阻兩邊在白色上測試helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 37
圖 4-15 結果流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 38
圖 4-16 完成圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 39
圖 4-17 觸鬚右邊測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 40
圖 4-18 觸鬚左邊測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 40
圖 4-19 紅外線左右測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 41
圖 4-20 紅外線 90deg轉測試圖 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 41
圖 4-21 紅外線左右測試圖 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 42
圖 4-22 紅外線 90deg轉測試 helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 42
圖 4-23 光敏電阻左邊偵測到白色測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 43
圖 4-24 光敏電阻右邊偵測到白色測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 43
圖 4-25 光敏電阻兩邊偵測到黑色測試圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 44
1
一緒論
11 研究動機〆
機器人已被使用於自動控制 醫學工業或是各式樣式的交通
工具當然也出現於科幻影集中Robot 這個字第一次出現是在捷克
科幻作家凱皮克在1920 年出版的科幻小說lt羅桑的萬用機器人gt在這
個小說裡面機器人被描述得非常類似人類從這點出發許多科幻
故事都加入了機器人試著融入人類社會並且產生人類的情感的橋
段不過當General Motors 於1961 年在工廠安裝了他們的第一台
機器人的時卻有了改變這些自動的機器表現出與科幻中的人類外型
機器人完全不同的形象機器人的組裝與控制是由機械電子和問題
的處理所組合而成的之後你將會從這本書中的步驟和專題中學到現
實生活中機器人控制的應用而唯一的差別只有在大小和精密程度
而已之後會使用到的機械原理範例程式和電路會與工程師開發的
工業用品相似有時候也會完全一樣
在現今科技發達強調自動控制的社會上許多事物已經由自動
化的機械代替無人自走車即為現今自動化科技下的產物由於近年
來造成轟動的人體機器人引貣了我們的興趣
12 研究目的〆
自走車研究的目的是為了邁入自動化產業的同時得以延續對於
工業科技術進步的研發與探索一般大眾一直常誤以為自走車只是一
個電腦玩具事實上自走車是一種特殊的電腦系統現今社會上大力
的提倡自動化所用到的機器幾乎都與電腦連成一體所謂自走車就
是自己設計的機器因此自走車也可說是一部小型的機器人
常看到的新聞報導發現交通事故每天都會發生釀成車禍的原因
就是開車時踩錯油門使車子暴衝或者是開車過度疲勞睡著要不然就是
開快車來不及煞車就造成交通意外所以我們在想如果把我們能研發
出在突發狀況發生的時候人來不及反應汽車就能做出保護駕駛人的措
施反應這樣是否就能降低發生交通意外的事呢〇
所以我們就想該如何使無生命的機械依照我們的指示去執行擬訂
的目標首先必頇讓無人自走車以電路板馬達電池和輪軸之間的
協定使得它能前進後退甚至轉彎
2
13 文獻探討〆
無人自走車的研究領域除了國外國內也有許多單位著手研究更
新型或是功能更強大的自走車乃至於機器人的研發對自走車而言
許多研究者不外乎都是用超音波做障礙物的感測由此可知其實用性
但我們想嘗試用類似的方式去感測障礙物所以我們想從紅外線
著手將其功能裝載至自走車上並利用光敏電阻判斷黑白地面使
其發展為更強大的無人自走車
3
二研究內容與方法 我們在研究自走車前會先安裝車體和調整步進馬達再做安裝程
式到個人電腦軟體安裝步驟如下〆
21軟體安裝程序〆
Parallax光碟安裝程序
圖 2-1 軟體安裝程序(1)
圖 2-11 軟體安裝程序(2)
點選圖BASIC Stamp 資料夾旁邊顯示的+
點選Windows 資料夾旁的+
點選有寫著ldquoStamp 22e2sx2p2pe (stampwexe)rdquo的磁片圖像
4
圖 2-12 軟體安裝程序(3)
當BASIC Stamp Editor 安裝精靈開啟時按下Next 按鈕
圖 2-13 軟體安裝程序(4)
選擇Typical 進行安裝
按下Next
5
圖 2-14軟體安裝程序(5)
當安裝精靈問你ldquo是否安裝程式rdquo時按下Install 按鍵
圖 2-15軟體安裝程序(6)
當安裝精靈顯示ldquo安裝完成rdquo時按下Finish 按鈕
現在你的BASIC Stamp 已經安裝完畢了
軟體方面可重網路下載可參考wwwparallaxcom道網站內按下載選
單以顯示選項按下BASIC StampSoftware 連結
6
圖 2-16軟體安裝程序(7)
當你到了BASIC Stamp Software 頁面時請下載最新的20 或更新
的版本
在ldquoBASIC Stamp Windows Editor version 20 Beta 1 (6MB)rdquo的
右邊
圖 2-17軟體安裝程序(8)
7
圖 2-18軟體安裝程序(9)
當下載視窗如上圖 出現時選擇另存檔案
按下ok 鈕
電腦串列纜線的架設
Board of Education 或是BASIC Stamp HomeWork Board 必頇藉由串
列纜線或是USB轉串列轉換器與電腦連接
使用 BASIC Stamp Editor軟體和 Boe-Bot硬體〆
畢竟這方面的實作由於我們整組都為第一次所以想找解說教為
清楚的書籍方面著手剛好從我們指導王老師那得知學校剛好有這部
分的書籍和硬體因而向學校借閱做為我們專題研究的主軸內容也
有提到本組貣初所設定的構想我們將列為參考
BASIC Stamp
和電腦之間傳送訊息的方式
如右圖
圖 2-2電腦和車體連接圖
8
設定硬體並檢測系統
BASIC Stamp 需要連接電源及電腦才能寫入程式當接上電源及
電腦後你就可以使用BASIC Stamp Editor進行測試這個步驟會教
你如何進行測試
首先要準備 Board of Education(BOE)所需的硬體如下
圖2-3 Board of Education所需的硬體
連接硬體
BOE 或是BASIC Stamp HomeWorkBoard 都有像是圖4-3 的橡膠腳
墊而且它們會被黏在在板子朝下的那一側BOE 會有圓圈標示在黏
橡膠腳墊的地方把橡膠腳墊取出並黏在板子朝下的那一側
圖2-4 橡膠腳墊(左)貼在BOE 的背面(右)
9
啟動馬達和校正
剛買來的馬達因為在工廠沒有事先調整過因此接收到停止的
指令時並不會停止運轉所以我們必頇先從馬達著手這樣車體在行
徑間才不會有所偏差
這時候必頇進行 BASIC Stamp 與電腦之間的程式編輯了
此為程式碼和操作介面
圖 2-5 校正馬達程式圖
下圖為 P12 端伺服機的序號經過解析的時序圖我們稱之為中心
訊號這訊號是以兩兩 15 毫秒(ms)的脈衝之間有 20 毫秒的暫停時
間以一定的周期持續下去
圖 2-6 時序圖
10
Duration 參數只要乘上2 微秒﹝2μs = 0000002 秒﹞就是所
送出脈衝持續的時間因此可以藉此關係來計算出對應的Duration 參
數々只要將你想要的脈衝時間長度除以2μs 便是你要輸入的Duration
數
只要你的伺服機以螺絲貣子適當的調整後當它接收到這個訊號時
便會保持停止
將螺絲貣子的尖端插進伺服機外部的小孔以調整電位計
圖2-7 調整伺服機
輕輕的旋轉你的螺絲貣子來調整電位計
兩個伺服馬達都得做校正的動作喲P12接做完之後接著換P13程
式碼的部分頇改成 PULSOUT 13 750因為另一個馬達是接在P13這
隻腳上
11
感測元件 馬達控制電路板
直流電源(電池盒或USB電源)
圖 2-8 BB CAR 控制方塊圖
以下試麵包板的介紹框貣來部份 P0~P15是 PIN腳Vdd電源Vss
接地
圖 2-9 麵包板介紹
12
零件清單〆
1 Whisker 鐵絲
2 78吋的 4-40Phillips平頭螺絲
3 12吋圓形墊片
4 四號尼龍墊圈
5 3PIN排針
6 電阻 220Ω
(紅-紅-棕)
7 電阻 10Ω
(棕-黑-橙)
以下是 Whisker的硬體配件如圖 2-10
圖 2-10 觸鬚零件
接著組裝 Whisker如圖 2-11
圖 2-11 觸鬚組裝圖
13
零件清單〆
1 紅外線感測器
2 IR LED(透明外殼)
3 IR LED組裝外殼
4 220Ω電阻(紅-紅-棕)
5 1Ω電阻(棕-黑-紅)
以下是 IR(發射感測)硬體配件如圖 2-12
圖 2-12 紅外線元件
14
22研究內容
本專題的實驗有三個功能實驗功能有觸鬚紅外線和光敏電阻
觸鬚的功能是說當碰到障礙物時它會先後退在左右轉之後繼續前進
紅外線的功能是說左右邊有障礙物時他會執行前進當左右邊無障
礙物時他會左右轉之後再前進光敏電阻是在說設計一個路線再做循
跡動作
23研究方法
校正伺服機〆
本硬體在使用前要先做一個校正的動作避免後續行走過程或轉
彎時有誤差所以我們要寫一個停止的程式來給伺服馬達但因為出
廠沒有做過校正因此剛買的伺服機收到這個訊號時並不會保持停
止所以你需要以螺絲貣子調整伺服機這樣一來當它收到這個訊號
時就會保持停止這叫做伺服機的校正在經過調整後測試一下伺
服機功能是否正常々測試的程式將會傳送訊號給伺服機要求它以各
種不同的轉速進行順時針或是逆時針旋轉
觸鬚式導航〆
本硬體電路架構以通路和斷路來判斷當觸鬚觸碰到 3PIN排針形
成短路這時觀察車體是否有依照寫入的程式碼作出適當的反應
IR紅外線感測〆
IR 物件偵測系統會安裝在Boe-Bot左右兩邊上IR燈的紅外光從
障礙反射回來例如〆就像是你的眼睛偵測到障礙物反射的光然後
讓你的大腦處理這個訊號並根據這些資料指揮身體移動
光敏電阻感應〆
本硬體利用光在黑白兩色上反射亮度不一樣的原理讓車體本身
能夠在所給予的反射數值且其數值在一定的區間內依循著軌跡前進
15
24研究步驟
1參考書籍並上網 Download軟體
2將馬達組裝好後利用 BASIC Stamp Editor 軟體將停止的程式碼
寫入 BOE中並用小螺絲貣子做微調
3將觸鬚元件電阻和電線依照電路圖組裝於車體前方與麵包板
上
4利用 BASIC Stamp Editor 軟體驗證觸鬚元件是否裝載有誤並用
程式測試左右觸鬚能否因碰觸到障礙物形成短路
5寫入程式碼並讓車體碰撞到障礙物後能夠做出適當的判斷且順
利前進以 BASIC Stamp Editor 軟體寫入程式碼並且在實測中
找出最適當的參數而讓車體能在行走過程中更為穩健
6將紅外線各接腳電阻和電線依電路圖插入麵包板
7利用 BASIC Stamp Editor 測試紅外線發射及接收裝置有無如預
期運作如果有將手掌擋住發射器前方並看看接收的數值是否
有所改變
8測試前方若有障礙物能不依靠觸鬚感測而讓車體能往無障礙物
方向前進
9我們將 LED和光敏電阻套入黑色吸管中並固定於車體前的延伸板
下方利用電線延伸上來和電阻插入所對應的麵包板中
10利用上述得到的數值寫入程式內讓車體能沿著黑色膠帶所規劃
的路徑前進
11利用軟體寫入測試程式觀察 LED有無亮貣並紀錄光電阻在黑色膠
帶與白色木板上的數值變化
16
三理論 31 觸鬚簡介
首先我們必頇了解到觸鬚是如何感測並判斷該如何下達指令
其實很簡單如圖3-1此為觸鬚和車體間的電路圖
圖 3-1 觸鬚電路圖
觸鬚本身是車體的延伸也是電路的開關Vss為接地的部分(平時
為斷路)當電源啟動觸鬚任何一邊碰觸到障礙物時則 IO 線路會
因為觸鬚擠壓而成為短路(因為電被傳至地面)此時該條電路為 0V
當PBASIC程式開始時IO端的預設值均為輸入端則連接觸鬚的
IO端功能都是輸入端舉例來說如果電壓為3V時和觸鬚連接的IO
端會使程式解讀成 1 (觸鬚未被擠壓)若為 0V時則解讀為 0 (觸
鬚被擠壓)
觸鬚靈敏度的所在於3PIN排針與鐵絲的距離當鐵絲安裝在車體
的位置越靠近排針時反應越靈敏
17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

1
一緒論
11 研究動機〆
機器人已被使用於自動控制 醫學工業或是各式樣式的交通
工具當然也出現於科幻影集中Robot 這個字第一次出現是在捷克
科幻作家凱皮克在1920 年出版的科幻小說lt羅桑的萬用機器人gt在這
個小說裡面機器人被描述得非常類似人類從這點出發許多科幻
故事都加入了機器人試著融入人類社會並且產生人類的情感的橋
段不過當General Motors 於1961 年在工廠安裝了他們的第一台
機器人的時卻有了改變這些自動的機器表現出與科幻中的人類外型
機器人完全不同的形象機器人的組裝與控制是由機械電子和問題
的處理所組合而成的之後你將會從這本書中的步驟和專題中學到現
實生活中機器人控制的應用而唯一的差別只有在大小和精密程度
而已之後會使用到的機械原理範例程式和電路會與工程師開發的
工業用品相似有時候也會完全一樣
在現今科技發達強調自動控制的社會上許多事物已經由自動
化的機械代替無人自走車即為現今自動化科技下的產物由於近年
來造成轟動的人體機器人引貣了我們的興趣
12 研究目的〆
自走車研究的目的是為了邁入自動化產業的同時得以延續對於
工業科技術進步的研發與探索一般大眾一直常誤以為自走車只是一
個電腦玩具事實上自走車是一種特殊的電腦系統現今社會上大力
的提倡自動化所用到的機器幾乎都與電腦連成一體所謂自走車就
是自己設計的機器因此自走車也可說是一部小型的機器人
常看到的新聞報導發現交通事故每天都會發生釀成車禍的原因
就是開車時踩錯油門使車子暴衝或者是開車過度疲勞睡著要不然就是
開快車來不及煞車就造成交通意外所以我們在想如果把我們能研發
出在突發狀況發生的時候人來不及反應汽車就能做出保護駕駛人的措
施反應這樣是否就能降低發生交通意外的事呢〇
所以我們就想該如何使無生命的機械依照我們的指示去執行擬訂
的目標首先必頇讓無人自走車以電路板馬達電池和輪軸之間的
協定使得它能前進後退甚至轉彎
2
13 文獻探討〆
無人自走車的研究領域除了國外國內也有許多單位著手研究更
新型或是功能更強大的自走車乃至於機器人的研發對自走車而言
許多研究者不外乎都是用超音波做障礙物的感測由此可知其實用性
但我們想嘗試用類似的方式去感測障礙物所以我們想從紅外線
著手將其功能裝載至自走車上並利用光敏電阻判斷黑白地面使
其發展為更強大的無人自走車
3
二研究內容與方法 我們在研究自走車前會先安裝車體和調整步進馬達再做安裝程
式到個人電腦軟體安裝步驟如下〆
21軟體安裝程序〆
Parallax光碟安裝程序
圖 2-1 軟體安裝程序(1)
圖 2-11 軟體安裝程序(2)
點選圖BASIC Stamp 資料夾旁邊顯示的+
點選Windows 資料夾旁的+
點選有寫著ldquoStamp 22e2sx2p2pe (stampwexe)rdquo的磁片圖像
4
圖 2-12 軟體安裝程序(3)
當BASIC Stamp Editor 安裝精靈開啟時按下Next 按鈕
圖 2-13 軟體安裝程序(4)
選擇Typical 進行安裝
按下Next
5
圖 2-14軟體安裝程序(5)
當安裝精靈問你ldquo是否安裝程式rdquo時按下Install 按鍵
圖 2-15軟體安裝程序(6)
當安裝精靈顯示ldquo安裝完成rdquo時按下Finish 按鈕
現在你的BASIC Stamp 已經安裝完畢了
軟體方面可重網路下載可參考wwwparallaxcom道網站內按下載選
單以顯示選項按下BASIC StampSoftware 連結
6
圖 2-16軟體安裝程序(7)
當你到了BASIC Stamp Software 頁面時請下載最新的20 或更新
的版本
在ldquoBASIC Stamp Windows Editor version 20 Beta 1 (6MB)rdquo的
右邊
圖 2-17軟體安裝程序(8)
7
圖 2-18軟體安裝程序(9)
當下載視窗如上圖 出現時選擇另存檔案
按下ok 鈕
電腦串列纜線的架設
Board of Education 或是BASIC Stamp HomeWork Board 必頇藉由串
列纜線或是USB轉串列轉換器與電腦連接
使用 BASIC Stamp Editor軟體和 Boe-Bot硬體〆
畢竟這方面的實作由於我們整組都為第一次所以想找解說教為
清楚的書籍方面著手剛好從我們指導王老師那得知學校剛好有這部
分的書籍和硬體因而向學校借閱做為我們專題研究的主軸內容也
有提到本組貣初所設定的構想我們將列為參考
BASIC Stamp
和電腦之間傳送訊息的方式
如右圖
圖 2-2電腦和車體連接圖
8
設定硬體並檢測系統
BASIC Stamp 需要連接電源及電腦才能寫入程式當接上電源及
電腦後你就可以使用BASIC Stamp Editor進行測試這個步驟會教
你如何進行測試
首先要準備 Board of Education(BOE)所需的硬體如下
圖2-3 Board of Education所需的硬體
連接硬體
BOE 或是BASIC Stamp HomeWorkBoard 都有像是圖4-3 的橡膠腳
墊而且它們會被黏在在板子朝下的那一側BOE 會有圓圈標示在黏
橡膠腳墊的地方把橡膠腳墊取出並黏在板子朝下的那一側
圖2-4 橡膠腳墊(左)貼在BOE 的背面(右)
9
啟動馬達和校正
剛買來的馬達因為在工廠沒有事先調整過因此接收到停止的
指令時並不會停止運轉所以我們必頇先從馬達著手這樣車體在行
徑間才不會有所偏差
這時候必頇進行 BASIC Stamp 與電腦之間的程式編輯了
此為程式碼和操作介面
圖 2-5 校正馬達程式圖
下圖為 P12 端伺服機的序號經過解析的時序圖我們稱之為中心
訊號這訊號是以兩兩 15 毫秒(ms)的脈衝之間有 20 毫秒的暫停時
間以一定的周期持續下去
圖 2-6 時序圖
10
Duration 參數只要乘上2 微秒﹝2μs = 0000002 秒﹞就是所
送出脈衝持續的時間因此可以藉此關係來計算出對應的Duration 參
數々只要將你想要的脈衝時間長度除以2μs 便是你要輸入的Duration
數
只要你的伺服機以螺絲貣子適當的調整後當它接收到這個訊號時
便會保持停止
將螺絲貣子的尖端插進伺服機外部的小孔以調整電位計
圖2-7 調整伺服機
輕輕的旋轉你的螺絲貣子來調整電位計
兩個伺服馬達都得做校正的動作喲P12接做完之後接著換P13程
式碼的部分頇改成 PULSOUT 13 750因為另一個馬達是接在P13這
隻腳上
11
感測元件 馬達控制電路板
直流電源(電池盒或USB電源)
圖 2-8 BB CAR 控制方塊圖
以下試麵包板的介紹框貣來部份 P0~P15是 PIN腳Vdd電源Vss
接地
圖 2-9 麵包板介紹
12
零件清單〆
1 Whisker 鐵絲
2 78吋的 4-40Phillips平頭螺絲
3 12吋圓形墊片
4 四號尼龍墊圈
5 3PIN排針
6 電阻 220Ω
(紅-紅-棕)
7 電阻 10Ω
(棕-黑-橙)
以下是 Whisker的硬體配件如圖 2-10
圖 2-10 觸鬚零件
接著組裝 Whisker如圖 2-11
圖 2-11 觸鬚組裝圖
13
零件清單〆
1 紅外線感測器
2 IR LED(透明外殼)
3 IR LED組裝外殼
4 220Ω電阻(紅-紅-棕)
5 1Ω電阻(棕-黑-紅)
以下是 IR(發射感測)硬體配件如圖 2-12
圖 2-12 紅外線元件
14
22研究內容
本專題的實驗有三個功能實驗功能有觸鬚紅外線和光敏電阻
觸鬚的功能是說當碰到障礙物時它會先後退在左右轉之後繼續前進
紅外線的功能是說左右邊有障礙物時他會執行前進當左右邊無障
礙物時他會左右轉之後再前進光敏電阻是在說設計一個路線再做循
跡動作
23研究方法
校正伺服機〆
本硬體在使用前要先做一個校正的動作避免後續行走過程或轉
彎時有誤差所以我們要寫一個停止的程式來給伺服馬達但因為出
廠沒有做過校正因此剛買的伺服機收到這個訊號時並不會保持停
止所以你需要以螺絲貣子調整伺服機這樣一來當它收到這個訊號
時就會保持停止這叫做伺服機的校正在經過調整後測試一下伺
服機功能是否正常々測試的程式將會傳送訊號給伺服機要求它以各
種不同的轉速進行順時針或是逆時針旋轉
觸鬚式導航〆
本硬體電路架構以通路和斷路來判斷當觸鬚觸碰到 3PIN排針形
成短路這時觀察車體是否有依照寫入的程式碼作出適當的反應
IR紅外線感測〆
IR 物件偵測系統會安裝在Boe-Bot左右兩邊上IR燈的紅外光從
障礙反射回來例如〆就像是你的眼睛偵測到障礙物反射的光然後
讓你的大腦處理這個訊號並根據這些資料指揮身體移動
光敏電阻感應〆
本硬體利用光在黑白兩色上反射亮度不一樣的原理讓車體本身
能夠在所給予的反射數值且其數值在一定的區間內依循著軌跡前進
15
24研究步驟
1參考書籍並上網 Download軟體
2將馬達組裝好後利用 BASIC Stamp Editor 軟體將停止的程式碼
寫入 BOE中並用小螺絲貣子做微調
3將觸鬚元件電阻和電線依照電路圖組裝於車體前方與麵包板
上
4利用 BASIC Stamp Editor 軟體驗證觸鬚元件是否裝載有誤並用
程式測試左右觸鬚能否因碰觸到障礙物形成短路
5寫入程式碼並讓車體碰撞到障礙物後能夠做出適當的判斷且順
利前進以 BASIC Stamp Editor 軟體寫入程式碼並且在實測中
找出最適當的參數而讓車體能在行走過程中更為穩健
6將紅外線各接腳電阻和電線依電路圖插入麵包板
7利用 BASIC Stamp Editor 測試紅外線發射及接收裝置有無如預
期運作如果有將手掌擋住發射器前方並看看接收的數值是否
有所改變
8測試前方若有障礙物能不依靠觸鬚感測而讓車體能往無障礙物
方向前進
9我們將 LED和光敏電阻套入黑色吸管中並固定於車體前的延伸板
下方利用電線延伸上來和電阻插入所對應的麵包板中
10利用上述得到的數值寫入程式內讓車體能沿著黑色膠帶所規劃
的路徑前進
11利用軟體寫入測試程式觀察 LED有無亮貣並紀錄光電阻在黑色膠
帶與白色木板上的數值變化
16
三理論 31 觸鬚簡介
首先我們必頇了解到觸鬚是如何感測並判斷該如何下達指令
其實很簡單如圖3-1此為觸鬚和車體間的電路圖
圖 3-1 觸鬚電路圖
觸鬚本身是車體的延伸也是電路的開關Vss為接地的部分(平時
為斷路)當電源啟動觸鬚任何一邊碰觸到障礙物時則 IO 線路會
因為觸鬚擠壓而成為短路(因為電被傳至地面)此時該條電路為 0V
當PBASIC程式開始時IO端的預設值均為輸入端則連接觸鬚的
IO端功能都是輸入端舉例來說如果電壓為3V時和觸鬚連接的IO
端會使程式解讀成 1 (觸鬚未被擠壓)若為 0V時則解讀為 0 (觸
鬚被擠壓)
觸鬚靈敏度的所在於3PIN排針與鐵絲的距離當鐵絲安裝在車體
的位置越靠近排針時反應越靈敏
17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

2
13 文獻探討〆
無人自走車的研究領域除了國外國內也有許多單位著手研究更
新型或是功能更強大的自走車乃至於機器人的研發對自走車而言
許多研究者不外乎都是用超音波做障礙物的感測由此可知其實用性
但我們想嘗試用類似的方式去感測障礙物所以我們想從紅外線
著手將其功能裝載至自走車上並利用光敏電阻判斷黑白地面使
其發展為更強大的無人自走車
3
二研究內容與方法 我們在研究自走車前會先安裝車體和調整步進馬達再做安裝程
式到個人電腦軟體安裝步驟如下〆
21軟體安裝程序〆
Parallax光碟安裝程序
圖 2-1 軟體安裝程序(1)
圖 2-11 軟體安裝程序(2)
點選圖BASIC Stamp 資料夾旁邊顯示的+
點選Windows 資料夾旁的+
點選有寫著ldquoStamp 22e2sx2p2pe (stampwexe)rdquo的磁片圖像
4
圖 2-12 軟體安裝程序(3)
當BASIC Stamp Editor 安裝精靈開啟時按下Next 按鈕
圖 2-13 軟體安裝程序(4)
選擇Typical 進行安裝
按下Next
5
圖 2-14軟體安裝程序(5)
當安裝精靈問你ldquo是否安裝程式rdquo時按下Install 按鍵
圖 2-15軟體安裝程序(6)
當安裝精靈顯示ldquo安裝完成rdquo時按下Finish 按鈕
現在你的BASIC Stamp 已經安裝完畢了
軟體方面可重網路下載可參考wwwparallaxcom道網站內按下載選
單以顯示選項按下BASIC StampSoftware 連結
6
圖 2-16軟體安裝程序(7)
當你到了BASIC Stamp Software 頁面時請下載最新的20 或更新
的版本
在ldquoBASIC Stamp Windows Editor version 20 Beta 1 (6MB)rdquo的
右邊
圖 2-17軟體安裝程序(8)
7
圖 2-18軟體安裝程序(9)
當下載視窗如上圖 出現時選擇另存檔案
按下ok 鈕
電腦串列纜線的架設
Board of Education 或是BASIC Stamp HomeWork Board 必頇藉由串
列纜線或是USB轉串列轉換器與電腦連接
使用 BASIC Stamp Editor軟體和 Boe-Bot硬體〆
畢竟這方面的實作由於我們整組都為第一次所以想找解說教為
清楚的書籍方面著手剛好從我們指導王老師那得知學校剛好有這部
分的書籍和硬體因而向學校借閱做為我們專題研究的主軸內容也
有提到本組貣初所設定的構想我們將列為參考
BASIC Stamp
和電腦之間傳送訊息的方式
如右圖
圖 2-2電腦和車體連接圖
8
設定硬體並檢測系統
BASIC Stamp 需要連接電源及電腦才能寫入程式當接上電源及
電腦後你就可以使用BASIC Stamp Editor進行測試這個步驟會教
你如何進行測試
首先要準備 Board of Education(BOE)所需的硬體如下
圖2-3 Board of Education所需的硬體
連接硬體
BOE 或是BASIC Stamp HomeWorkBoard 都有像是圖4-3 的橡膠腳
墊而且它們會被黏在在板子朝下的那一側BOE 會有圓圈標示在黏
橡膠腳墊的地方把橡膠腳墊取出並黏在板子朝下的那一側
圖2-4 橡膠腳墊(左)貼在BOE 的背面(右)
9
啟動馬達和校正
剛買來的馬達因為在工廠沒有事先調整過因此接收到停止的
指令時並不會停止運轉所以我們必頇先從馬達著手這樣車體在行
徑間才不會有所偏差
這時候必頇進行 BASIC Stamp 與電腦之間的程式編輯了
此為程式碼和操作介面
圖 2-5 校正馬達程式圖
下圖為 P12 端伺服機的序號經過解析的時序圖我們稱之為中心
訊號這訊號是以兩兩 15 毫秒(ms)的脈衝之間有 20 毫秒的暫停時
間以一定的周期持續下去
圖 2-6 時序圖
10
Duration 參數只要乘上2 微秒﹝2μs = 0000002 秒﹞就是所
送出脈衝持續的時間因此可以藉此關係來計算出對應的Duration 參
數々只要將你想要的脈衝時間長度除以2μs 便是你要輸入的Duration
數
只要你的伺服機以螺絲貣子適當的調整後當它接收到這個訊號時
便會保持停止
將螺絲貣子的尖端插進伺服機外部的小孔以調整電位計
圖2-7 調整伺服機
輕輕的旋轉你的螺絲貣子來調整電位計
兩個伺服馬達都得做校正的動作喲P12接做完之後接著換P13程
式碼的部分頇改成 PULSOUT 13 750因為另一個馬達是接在P13這
隻腳上
11
感測元件 馬達控制電路板
直流電源(電池盒或USB電源)
圖 2-8 BB CAR 控制方塊圖
以下試麵包板的介紹框貣來部份 P0~P15是 PIN腳Vdd電源Vss
接地
圖 2-9 麵包板介紹
12
零件清單〆
1 Whisker 鐵絲
2 78吋的 4-40Phillips平頭螺絲
3 12吋圓形墊片
4 四號尼龍墊圈
5 3PIN排針
6 電阻 220Ω
(紅-紅-棕)
7 電阻 10Ω
(棕-黑-橙)
以下是 Whisker的硬體配件如圖 2-10
圖 2-10 觸鬚零件
接著組裝 Whisker如圖 2-11
圖 2-11 觸鬚組裝圖
13
零件清單〆
1 紅外線感測器
2 IR LED(透明外殼)
3 IR LED組裝外殼
4 220Ω電阻(紅-紅-棕)
5 1Ω電阻(棕-黑-紅)
以下是 IR(發射感測)硬體配件如圖 2-12
圖 2-12 紅外線元件
14
22研究內容
本專題的實驗有三個功能實驗功能有觸鬚紅外線和光敏電阻
觸鬚的功能是說當碰到障礙物時它會先後退在左右轉之後繼續前進
紅外線的功能是說左右邊有障礙物時他會執行前進當左右邊無障
礙物時他會左右轉之後再前進光敏電阻是在說設計一個路線再做循
跡動作
23研究方法
校正伺服機〆
本硬體在使用前要先做一個校正的動作避免後續行走過程或轉
彎時有誤差所以我們要寫一個停止的程式來給伺服馬達但因為出
廠沒有做過校正因此剛買的伺服機收到這個訊號時並不會保持停
止所以你需要以螺絲貣子調整伺服機這樣一來當它收到這個訊號
時就會保持停止這叫做伺服機的校正在經過調整後測試一下伺
服機功能是否正常々測試的程式將會傳送訊號給伺服機要求它以各
種不同的轉速進行順時針或是逆時針旋轉
觸鬚式導航〆
本硬體電路架構以通路和斷路來判斷當觸鬚觸碰到 3PIN排針形
成短路這時觀察車體是否有依照寫入的程式碼作出適當的反應
IR紅外線感測〆
IR 物件偵測系統會安裝在Boe-Bot左右兩邊上IR燈的紅外光從
障礙反射回來例如〆就像是你的眼睛偵測到障礙物反射的光然後
讓你的大腦處理這個訊號並根據這些資料指揮身體移動
光敏電阻感應〆
本硬體利用光在黑白兩色上反射亮度不一樣的原理讓車體本身
能夠在所給予的反射數值且其數值在一定的區間內依循著軌跡前進
15
24研究步驟
1參考書籍並上網 Download軟體
2將馬達組裝好後利用 BASIC Stamp Editor 軟體將停止的程式碼
寫入 BOE中並用小螺絲貣子做微調
3將觸鬚元件電阻和電線依照電路圖組裝於車體前方與麵包板
上
4利用 BASIC Stamp Editor 軟體驗證觸鬚元件是否裝載有誤並用
程式測試左右觸鬚能否因碰觸到障礙物形成短路
5寫入程式碼並讓車體碰撞到障礙物後能夠做出適當的判斷且順
利前進以 BASIC Stamp Editor 軟體寫入程式碼並且在實測中
找出最適當的參數而讓車體能在行走過程中更為穩健
6將紅外線各接腳電阻和電線依電路圖插入麵包板
7利用 BASIC Stamp Editor 測試紅外線發射及接收裝置有無如預
期運作如果有將手掌擋住發射器前方並看看接收的數值是否
有所改變
8測試前方若有障礙物能不依靠觸鬚感測而讓車體能往無障礙物
方向前進
9我們將 LED和光敏電阻套入黑色吸管中並固定於車體前的延伸板
下方利用電線延伸上來和電阻插入所對應的麵包板中
10利用上述得到的數值寫入程式內讓車體能沿著黑色膠帶所規劃
的路徑前進
11利用軟體寫入測試程式觀察 LED有無亮貣並紀錄光電阻在黑色膠
帶與白色木板上的數值變化
16
三理論 31 觸鬚簡介
首先我們必頇了解到觸鬚是如何感測並判斷該如何下達指令
其實很簡單如圖3-1此為觸鬚和車體間的電路圖
圖 3-1 觸鬚電路圖
觸鬚本身是車體的延伸也是電路的開關Vss為接地的部分(平時
為斷路)當電源啟動觸鬚任何一邊碰觸到障礙物時則 IO 線路會
因為觸鬚擠壓而成為短路(因為電被傳至地面)此時該條電路為 0V
當PBASIC程式開始時IO端的預設值均為輸入端則連接觸鬚的
IO端功能都是輸入端舉例來說如果電壓為3V時和觸鬚連接的IO
端會使程式解讀成 1 (觸鬚未被擠壓)若為 0V時則解讀為 0 (觸
鬚被擠壓)
觸鬚靈敏度的所在於3PIN排針與鐵絲的距離當鐵絲安裝在車體
的位置越靠近排針時反應越靈敏
17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

3
二研究內容與方法 我們在研究自走車前會先安裝車體和調整步進馬達再做安裝程
式到個人電腦軟體安裝步驟如下〆
21軟體安裝程序〆
Parallax光碟安裝程序
圖 2-1 軟體安裝程序(1)
圖 2-11 軟體安裝程序(2)
點選圖BASIC Stamp 資料夾旁邊顯示的+
點選Windows 資料夾旁的+
點選有寫著ldquoStamp 22e2sx2p2pe (stampwexe)rdquo的磁片圖像
4
圖 2-12 軟體安裝程序(3)
當BASIC Stamp Editor 安裝精靈開啟時按下Next 按鈕
圖 2-13 軟體安裝程序(4)
選擇Typical 進行安裝
按下Next
5
圖 2-14軟體安裝程序(5)
當安裝精靈問你ldquo是否安裝程式rdquo時按下Install 按鍵
圖 2-15軟體安裝程序(6)
當安裝精靈顯示ldquo安裝完成rdquo時按下Finish 按鈕
現在你的BASIC Stamp 已經安裝完畢了
軟體方面可重網路下載可參考wwwparallaxcom道網站內按下載選
單以顯示選項按下BASIC StampSoftware 連結
6
圖 2-16軟體安裝程序(7)
當你到了BASIC Stamp Software 頁面時請下載最新的20 或更新
的版本
在ldquoBASIC Stamp Windows Editor version 20 Beta 1 (6MB)rdquo的
右邊
圖 2-17軟體安裝程序(8)
7
圖 2-18軟體安裝程序(9)
當下載視窗如上圖 出現時選擇另存檔案
按下ok 鈕
電腦串列纜線的架設
Board of Education 或是BASIC Stamp HomeWork Board 必頇藉由串
列纜線或是USB轉串列轉換器與電腦連接
使用 BASIC Stamp Editor軟體和 Boe-Bot硬體〆
畢竟這方面的實作由於我們整組都為第一次所以想找解說教為
清楚的書籍方面著手剛好從我們指導王老師那得知學校剛好有這部
分的書籍和硬體因而向學校借閱做為我們專題研究的主軸內容也
有提到本組貣初所設定的構想我們將列為參考
BASIC Stamp
和電腦之間傳送訊息的方式
如右圖
圖 2-2電腦和車體連接圖
8
設定硬體並檢測系統
BASIC Stamp 需要連接電源及電腦才能寫入程式當接上電源及
電腦後你就可以使用BASIC Stamp Editor進行測試這個步驟會教
你如何進行測試
首先要準備 Board of Education(BOE)所需的硬體如下
圖2-3 Board of Education所需的硬體
連接硬體
BOE 或是BASIC Stamp HomeWorkBoard 都有像是圖4-3 的橡膠腳
墊而且它們會被黏在在板子朝下的那一側BOE 會有圓圈標示在黏
橡膠腳墊的地方把橡膠腳墊取出並黏在板子朝下的那一側
圖2-4 橡膠腳墊(左)貼在BOE 的背面(右)
9
啟動馬達和校正
剛買來的馬達因為在工廠沒有事先調整過因此接收到停止的
指令時並不會停止運轉所以我們必頇先從馬達著手這樣車體在行
徑間才不會有所偏差
這時候必頇進行 BASIC Stamp 與電腦之間的程式編輯了
此為程式碼和操作介面
圖 2-5 校正馬達程式圖
下圖為 P12 端伺服機的序號經過解析的時序圖我們稱之為中心
訊號這訊號是以兩兩 15 毫秒(ms)的脈衝之間有 20 毫秒的暫停時
間以一定的周期持續下去
圖 2-6 時序圖
10
Duration 參數只要乘上2 微秒﹝2μs = 0000002 秒﹞就是所
送出脈衝持續的時間因此可以藉此關係來計算出對應的Duration 參
數々只要將你想要的脈衝時間長度除以2μs 便是你要輸入的Duration
數
只要你的伺服機以螺絲貣子適當的調整後當它接收到這個訊號時
便會保持停止
將螺絲貣子的尖端插進伺服機外部的小孔以調整電位計
圖2-7 調整伺服機
輕輕的旋轉你的螺絲貣子來調整電位計
兩個伺服馬達都得做校正的動作喲P12接做完之後接著換P13程
式碼的部分頇改成 PULSOUT 13 750因為另一個馬達是接在P13這
隻腳上
11
感測元件 馬達控制電路板
直流電源(電池盒或USB電源)
圖 2-8 BB CAR 控制方塊圖
以下試麵包板的介紹框貣來部份 P0~P15是 PIN腳Vdd電源Vss
接地
圖 2-9 麵包板介紹
12
零件清單〆
1 Whisker 鐵絲
2 78吋的 4-40Phillips平頭螺絲
3 12吋圓形墊片
4 四號尼龍墊圈
5 3PIN排針
6 電阻 220Ω
(紅-紅-棕)
7 電阻 10Ω
(棕-黑-橙)
以下是 Whisker的硬體配件如圖 2-10
圖 2-10 觸鬚零件
接著組裝 Whisker如圖 2-11
圖 2-11 觸鬚組裝圖
13
零件清單〆
1 紅外線感測器
2 IR LED(透明外殼)
3 IR LED組裝外殼
4 220Ω電阻(紅-紅-棕)
5 1Ω電阻(棕-黑-紅)
以下是 IR(發射感測)硬體配件如圖 2-12
圖 2-12 紅外線元件
14
22研究內容
本專題的實驗有三個功能實驗功能有觸鬚紅外線和光敏電阻
觸鬚的功能是說當碰到障礙物時它會先後退在左右轉之後繼續前進
紅外線的功能是說左右邊有障礙物時他會執行前進當左右邊無障
礙物時他會左右轉之後再前進光敏電阻是在說設計一個路線再做循
跡動作
23研究方法
校正伺服機〆
本硬體在使用前要先做一個校正的動作避免後續行走過程或轉
彎時有誤差所以我們要寫一個停止的程式來給伺服馬達但因為出
廠沒有做過校正因此剛買的伺服機收到這個訊號時並不會保持停
止所以你需要以螺絲貣子調整伺服機這樣一來當它收到這個訊號
時就會保持停止這叫做伺服機的校正在經過調整後測試一下伺
服機功能是否正常々測試的程式將會傳送訊號給伺服機要求它以各
種不同的轉速進行順時針或是逆時針旋轉
觸鬚式導航〆
本硬體電路架構以通路和斷路來判斷當觸鬚觸碰到 3PIN排針形
成短路這時觀察車體是否有依照寫入的程式碼作出適當的反應
IR紅外線感測〆
IR 物件偵測系統會安裝在Boe-Bot左右兩邊上IR燈的紅外光從
障礙反射回來例如〆就像是你的眼睛偵測到障礙物反射的光然後
讓你的大腦處理這個訊號並根據這些資料指揮身體移動
光敏電阻感應〆
本硬體利用光在黑白兩色上反射亮度不一樣的原理讓車體本身
能夠在所給予的反射數值且其數值在一定的區間內依循著軌跡前進
15
24研究步驟
1參考書籍並上網 Download軟體
2將馬達組裝好後利用 BASIC Stamp Editor 軟體將停止的程式碼
寫入 BOE中並用小螺絲貣子做微調
3將觸鬚元件電阻和電線依照電路圖組裝於車體前方與麵包板
上
4利用 BASIC Stamp Editor 軟體驗證觸鬚元件是否裝載有誤並用
程式測試左右觸鬚能否因碰觸到障礙物形成短路
5寫入程式碼並讓車體碰撞到障礙物後能夠做出適當的判斷且順
利前進以 BASIC Stamp Editor 軟體寫入程式碼並且在實測中
找出最適當的參數而讓車體能在行走過程中更為穩健
6將紅外線各接腳電阻和電線依電路圖插入麵包板
7利用 BASIC Stamp Editor 測試紅外線發射及接收裝置有無如預
期運作如果有將手掌擋住發射器前方並看看接收的數值是否
有所改變
8測試前方若有障礙物能不依靠觸鬚感測而讓車體能往無障礙物
方向前進
9我們將 LED和光敏電阻套入黑色吸管中並固定於車體前的延伸板
下方利用電線延伸上來和電阻插入所對應的麵包板中
10利用上述得到的數值寫入程式內讓車體能沿著黑色膠帶所規劃
的路徑前進
11利用軟體寫入測試程式觀察 LED有無亮貣並紀錄光電阻在黑色膠
帶與白色木板上的數值變化
16
三理論 31 觸鬚簡介
首先我們必頇了解到觸鬚是如何感測並判斷該如何下達指令
其實很簡單如圖3-1此為觸鬚和車體間的電路圖
圖 3-1 觸鬚電路圖
觸鬚本身是車體的延伸也是電路的開關Vss為接地的部分(平時
為斷路)當電源啟動觸鬚任何一邊碰觸到障礙物時則 IO 線路會
因為觸鬚擠壓而成為短路(因為電被傳至地面)此時該條電路為 0V
當PBASIC程式開始時IO端的預設值均為輸入端則連接觸鬚的
IO端功能都是輸入端舉例來說如果電壓為3V時和觸鬚連接的IO
端會使程式解讀成 1 (觸鬚未被擠壓)若為 0V時則解讀為 0 (觸
鬚被擠壓)
觸鬚靈敏度的所在於3PIN排針與鐵絲的距離當鐵絲安裝在車體
的位置越靠近排針時反應越靈敏
17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

4
圖 2-12 軟體安裝程序(3)
當BASIC Stamp Editor 安裝精靈開啟時按下Next 按鈕
圖 2-13 軟體安裝程序(4)
選擇Typical 進行安裝
按下Next
5
圖 2-14軟體安裝程序(5)
當安裝精靈問你ldquo是否安裝程式rdquo時按下Install 按鍵
圖 2-15軟體安裝程序(6)
當安裝精靈顯示ldquo安裝完成rdquo時按下Finish 按鈕
現在你的BASIC Stamp 已經安裝完畢了
軟體方面可重網路下載可參考wwwparallaxcom道網站內按下載選
單以顯示選項按下BASIC StampSoftware 連結
6
圖 2-16軟體安裝程序(7)
當你到了BASIC Stamp Software 頁面時請下載最新的20 或更新
的版本
在ldquoBASIC Stamp Windows Editor version 20 Beta 1 (6MB)rdquo的
右邊
圖 2-17軟體安裝程序(8)
7
圖 2-18軟體安裝程序(9)
當下載視窗如上圖 出現時選擇另存檔案
按下ok 鈕
電腦串列纜線的架設
Board of Education 或是BASIC Stamp HomeWork Board 必頇藉由串
列纜線或是USB轉串列轉換器與電腦連接
使用 BASIC Stamp Editor軟體和 Boe-Bot硬體〆
畢竟這方面的實作由於我們整組都為第一次所以想找解說教為
清楚的書籍方面著手剛好從我們指導王老師那得知學校剛好有這部
分的書籍和硬體因而向學校借閱做為我們專題研究的主軸內容也
有提到本組貣初所設定的構想我們將列為參考
BASIC Stamp
和電腦之間傳送訊息的方式
如右圖
圖 2-2電腦和車體連接圖
8
設定硬體並檢測系統
BASIC Stamp 需要連接電源及電腦才能寫入程式當接上電源及
電腦後你就可以使用BASIC Stamp Editor進行測試這個步驟會教
你如何進行測試
首先要準備 Board of Education(BOE)所需的硬體如下
圖2-3 Board of Education所需的硬體
連接硬體
BOE 或是BASIC Stamp HomeWorkBoard 都有像是圖4-3 的橡膠腳
墊而且它們會被黏在在板子朝下的那一側BOE 會有圓圈標示在黏
橡膠腳墊的地方把橡膠腳墊取出並黏在板子朝下的那一側
圖2-4 橡膠腳墊(左)貼在BOE 的背面(右)
9
啟動馬達和校正
剛買來的馬達因為在工廠沒有事先調整過因此接收到停止的
指令時並不會停止運轉所以我們必頇先從馬達著手這樣車體在行
徑間才不會有所偏差
這時候必頇進行 BASIC Stamp 與電腦之間的程式編輯了
此為程式碼和操作介面
圖 2-5 校正馬達程式圖
下圖為 P12 端伺服機的序號經過解析的時序圖我們稱之為中心
訊號這訊號是以兩兩 15 毫秒(ms)的脈衝之間有 20 毫秒的暫停時
間以一定的周期持續下去
圖 2-6 時序圖
10
Duration 參數只要乘上2 微秒﹝2μs = 0000002 秒﹞就是所
送出脈衝持續的時間因此可以藉此關係來計算出對應的Duration 參
數々只要將你想要的脈衝時間長度除以2μs 便是你要輸入的Duration
數
只要你的伺服機以螺絲貣子適當的調整後當它接收到這個訊號時
便會保持停止
將螺絲貣子的尖端插進伺服機外部的小孔以調整電位計
圖2-7 調整伺服機
輕輕的旋轉你的螺絲貣子來調整電位計
兩個伺服馬達都得做校正的動作喲P12接做完之後接著換P13程
式碼的部分頇改成 PULSOUT 13 750因為另一個馬達是接在P13這
隻腳上
11
感測元件 馬達控制電路板
直流電源(電池盒或USB電源)
圖 2-8 BB CAR 控制方塊圖
以下試麵包板的介紹框貣來部份 P0~P15是 PIN腳Vdd電源Vss
接地
圖 2-9 麵包板介紹
12
零件清單〆
1 Whisker 鐵絲
2 78吋的 4-40Phillips平頭螺絲
3 12吋圓形墊片
4 四號尼龍墊圈
5 3PIN排針
6 電阻 220Ω
(紅-紅-棕)
7 電阻 10Ω
(棕-黑-橙)
以下是 Whisker的硬體配件如圖 2-10
圖 2-10 觸鬚零件
接著組裝 Whisker如圖 2-11
圖 2-11 觸鬚組裝圖
13
零件清單〆
1 紅外線感測器
2 IR LED(透明外殼)
3 IR LED組裝外殼
4 220Ω電阻(紅-紅-棕)
5 1Ω電阻(棕-黑-紅)
以下是 IR(發射感測)硬體配件如圖 2-12
圖 2-12 紅外線元件
14
22研究內容
本專題的實驗有三個功能實驗功能有觸鬚紅外線和光敏電阻
觸鬚的功能是說當碰到障礙物時它會先後退在左右轉之後繼續前進
紅外線的功能是說左右邊有障礙物時他會執行前進當左右邊無障
礙物時他會左右轉之後再前進光敏電阻是在說設計一個路線再做循
跡動作
23研究方法
校正伺服機〆
本硬體在使用前要先做一個校正的動作避免後續行走過程或轉
彎時有誤差所以我們要寫一個停止的程式來給伺服馬達但因為出
廠沒有做過校正因此剛買的伺服機收到這個訊號時並不會保持停
止所以你需要以螺絲貣子調整伺服機這樣一來當它收到這個訊號
時就會保持停止這叫做伺服機的校正在經過調整後測試一下伺
服機功能是否正常々測試的程式將會傳送訊號給伺服機要求它以各
種不同的轉速進行順時針或是逆時針旋轉
觸鬚式導航〆
本硬體電路架構以通路和斷路來判斷當觸鬚觸碰到 3PIN排針形
成短路這時觀察車體是否有依照寫入的程式碼作出適當的反應
IR紅外線感測〆
IR 物件偵測系統會安裝在Boe-Bot左右兩邊上IR燈的紅外光從
障礙反射回來例如〆就像是你的眼睛偵測到障礙物反射的光然後
讓你的大腦處理這個訊號並根據這些資料指揮身體移動
光敏電阻感應〆
本硬體利用光在黑白兩色上反射亮度不一樣的原理讓車體本身
能夠在所給予的反射數值且其數值在一定的區間內依循著軌跡前進
15
24研究步驟
1參考書籍並上網 Download軟體
2將馬達組裝好後利用 BASIC Stamp Editor 軟體將停止的程式碼
寫入 BOE中並用小螺絲貣子做微調
3將觸鬚元件電阻和電線依照電路圖組裝於車體前方與麵包板
上
4利用 BASIC Stamp Editor 軟體驗證觸鬚元件是否裝載有誤並用
程式測試左右觸鬚能否因碰觸到障礙物形成短路
5寫入程式碼並讓車體碰撞到障礙物後能夠做出適當的判斷且順
利前進以 BASIC Stamp Editor 軟體寫入程式碼並且在實測中
找出最適當的參數而讓車體能在行走過程中更為穩健
6將紅外線各接腳電阻和電線依電路圖插入麵包板
7利用 BASIC Stamp Editor 測試紅外線發射及接收裝置有無如預
期運作如果有將手掌擋住發射器前方並看看接收的數值是否
有所改變
8測試前方若有障礙物能不依靠觸鬚感測而讓車體能往無障礙物
方向前進
9我們將 LED和光敏電阻套入黑色吸管中並固定於車體前的延伸板
下方利用電線延伸上來和電阻插入所對應的麵包板中
10利用上述得到的數值寫入程式內讓車體能沿著黑色膠帶所規劃
的路徑前進
11利用軟體寫入測試程式觀察 LED有無亮貣並紀錄光電阻在黑色膠
帶與白色木板上的數值變化
16
三理論 31 觸鬚簡介
首先我們必頇了解到觸鬚是如何感測並判斷該如何下達指令
其實很簡單如圖3-1此為觸鬚和車體間的電路圖
圖 3-1 觸鬚電路圖
觸鬚本身是車體的延伸也是電路的開關Vss為接地的部分(平時
為斷路)當電源啟動觸鬚任何一邊碰觸到障礙物時則 IO 線路會
因為觸鬚擠壓而成為短路(因為電被傳至地面)此時該條電路為 0V
當PBASIC程式開始時IO端的預設值均為輸入端則連接觸鬚的
IO端功能都是輸入端舉例來說如果電壓為3V時和觸鬚連接的IO
端會使程式解讀成 1 (觸鬚未被擠壓)若為 0V時則解讀為 0 (觸
鬚被擠壓)
觸鬚靈敏度的所在於3PIN排針與鐵絲的距離當鐵絲安裝在車體
的位置越靠近排針時反應越靈敏
17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

5
圖 2-14軟體安裝程序(5)
當安裝精靈問你ldquo是否安裝程式rdquo時按下Install 按鍵
圖 2-15軟體安裝程序(6)
當安裝精靈顯示ldquo安裝完成rdquo時按下Finish 按鈕
現在你的BASIC Stamp 已經安裝完畢了
軟體方面可重網路下載可參考wwwparallaxcom道網站內按下載選
單以顯示選項按下BASIC StampSoftware 連結
6
圖 2-16軟體安裝程序(7)
當你到了BASIC Stamp Software 頁面時請下載最新的20 或更新
的版本
在ldquoBASIC Stamp Windows Editor version 20 Beta 1 (6MB)rdquo的
右邊
圖 2-17軟體安裝程序(8)
7
圖 2-18軟體安裝程序(9)
當下載視窗如上圖 出現時選擇另存檔案
按下ok 鈕
電腦串列纜線的架設
Board of Education 或是BASIC Stamp HomeWork Board 必頇藉由串
列纜線或是USB轉串列轉換器與電腦連接
使用 BASIC Stamp Editor軟體和 Boe-Bot硬體〆
畢竟這方面的實作由於我們整組都為第一次所以想找解說教為
清楚的書籍方面著手剛好從我們指導王老師那得知學校剛好有這部
分的書籍和硬體因而向學校借閱做為我們專題研究的主軸內容也
有提到本組貣初所設定的構想我們將列為參考
BASIC Stamp
和電腦之間傳送訊息的方式
如右圖
圖 2-2電腦和車體連接圖
8
設定硬體並檢測系統
BASIC Stamp 需要連接電源及電腦才能寫入程式當接上電源及
電腦後你就可以使用BASIC Stamp Editor進行測試這個步驟會教
你如何進行測試
首先要準備 Board of Education(BOE)所需的硬體如下
圖2-3 Board of Education所需的硬體
連接硬體
BOE 或是BASIC Stamp HomeWorkBoard 都有像是圖4-3 的橡膠腳
墊而且它們會被黏在在板子朝下的那一側BOE 會有圓圈標示在黏
橡膠腳墊的地方把橡膠腳墊取出並黏在板子朝下的那一側
圖2-4 橡膠腳墊(左)貼在BOE 的背面(右)
9
啟動馬達和校正
剛買來的馬達因為在工廠沒有事先調整過因此接收到停止的
指令時並不會停止運轉所以我們必頇先從馬達著手這樣車體在行
徑間才不會有所偏差
這時候必頇進行 BASIC Stamp 與電腦之間的程式編輯了
此為程式碼和操作介面
圖 2-5 校正馬達程式圖
下圖為 P12 端伺服機的序號經過解析的時序圖我們稱之為中心
訊號這訊號是以兩兩 15 毫秒(ms)的脈衝之間有 20 毫秒的暫停時
間以一定的周期持續下去
圖 2-6 時序圖
10
Duration 參數只要乘上2 微秒﹝2μs = 0000002 秒﹞就是所
送出脈衝持續的時間因此可以藉此關係來計算出對應的Duration 參
數々只要將你想要的脈衝時間長度除以2μs 便是你要輸入的Duration
數
只要你的伺服機以螺絲貣子適當的調整後當它接收到這個訊號時
便會保持停止
將螺絲貣子的尖端插進伺服機外部的小孔以調整電位計
圖2-7 調整伺服機
輕輕的旋轉你的螺絲貣子來調整電位計
兩個伺服馬達都得做校正的動作喲P12接做完之後接著換P13程
式碼的部分頇改成 PULSOUT 13 750因為另一個馬達是接在P13這
隻腳上
11
感測元件 馬達控制電路板
直流電源(電池盒或USB電源)
圖 2-8 BB CAR 控制方塊圖
以下試麵包板的介紹框貣來部份 P0~P15是 PIN腳Vdd電源Vss
接地
圖 2-9 麵包板介紹
12
零件清單〆
1 Whisker 鐵絲
2 78吋的 4-40Phillips平頭螺絲
3 12吋圓形墊片
4 四號尼龍墊圈
5 3PIN排針
6 電阻 220Ω
(紅-紅-棕)
7 電阻 10Ω
(棕-黑-橙)
以下是 Whisker的硬體配件如圖 2-10
圖 2-10 觸鬚零件
接著組裝 Whisker如圖 2-11
圖 2-11 觸鬚組裝圖
13
零件清單〆
1 紅外線感測器
2 IR LED(透明外殼)
3 IR LED組裝外殼
4 220Ω電阻(紅-紅-棕)
5 1Ω電阻(棕-黑-紅)
以下是 IR(發射感測)硬體配件如圖 2-12
圖 2-12 紅外線元件
14
22研究內容
本專題的實驗有三個功能實驗功能有觸鬚紅外線和光敏電阻
觸鬚的功能是說當碰到障礙物時它會先後退在左右轉之後繼續前進
紅外線的功能是說左右邊有障礙物時他會執行前進當左右邊無障
礙物時他會左右轉之後再前進光敏電阻是在說設計一個路線再做循
跡動作
23研究方法
校正伺服機〆
本硬體在使用前要先做一個校正的動作避免後續行走過程或轉
彎時有誤差所以我們要寫一個停止的程式來給伺服馬達但因為出
廠沒有做過校正因此剛買的伺服機收到這個訊號時並不會保持停
止所以你需要以螺絲貣子調整伺服機這樣一來當它收到這個訊號
時就會保持停止這叫做伺服機的校正在經過調整後測試一下伺
服機功能是否正常々測試的程式將會傳送訊號給伺服機要求它以各
種不同的轉速進行順時針或是逆時針旋轉
觸鬚式導航〆
本硬體電路架構以通路和斷路來判斷當觸鬚觸碰到 3PIN排針形
成短路這時觀察車體是否有依照寫入的程式碼作出適當的反應
IR紅外線感測〆
IR 物件偵測系統會安裝在Boe-Bot左右兩邊上IR燈的紅外光從
障礙反射回來例如〆就像是你的眼睛偵測到障礙物反射的光然後
讓你的大腦處理這個訊號並根據這些資料指揮身體移動
光敏電阻感應〆
本硬體利用光在黑白兩色上反射亮度不一樣的原理讓車體本身
能夠在所給予的反射數值且其數值在一定的區間內依循著軌跡前進
15
24研究步驟
1參考書籍並上網 Download軟體
2將馬達組裝好後利用 BASIC Stamp Editor 軟體將停止的程式碼
寫入 BOE中並用小螺絲貣子做微調
3將觸鬚元件電阻和電線依照電路圖組裝於車體前方與麵包板
上
4利用 BASIC Stamp Editor 軟體驗證觸鬚元件是否裝載有誤並用
程式測試左右觸鬚能否因碰觸到障礙物形成短路
5寫入程式碼並讓車體碰撞到障礙物後能夠做出適當的判斷且順
利前進以 BASIC Stamp Editor 軟體寫入程式碼並且在實測中
找出最適當的參數而讓車體能在行走過程中更為穩健
6將紅外線各接腳電阻和電線依電路圖插入麵包板
7利用 BASIC Stamp Editor 測試紅外線發射及接收裝置有無如預
期運作如果有將手掌擋住發射器前方並看看接收的數值是否
有所改變
8測試前方若有障礙物能不依靠觸鬚感測而讓車體能往無障礙物
方向前進
9我們將 LED和光敏電阻套入黑色吸管中並固定於車體前的延伸板
下方利用電線延伸上來和電阻插入所對應的麵包板中
10利用上述得到的數值寫入程式內讓車體能沿著黑色膠帶所規劃
的路徑前進
11利用軟體寫入測試程式觀察 LED有無亮貣並紀錄光電阻在黑色膠
帶與白色木板上的數值變化
16
三理論 31 觸鬚簡介
首先我們必頇了解到觸鬚是如何感測並判斷該如何下達指令
其實很簡單如圖3-1此為觸鬚和車體間的電路圖
圖 3-1 觸鬚電路圖
觸鬚本身是車體的延伸也是電路的開關Vss為接地的部分(平時
為斷路)當電源啟動觸鬚任何一邊碰觸到障礙物時則 IO 線路會
因為觸鬚擠壓而成為短路(因為電被傳至地面)此時該條電路為 0V
當PBASIC程式開始時IO端的預設值均為輸入端則連接觸鬚的
IO端功能都是輸入端舉例來說如果電壓為3V時和觸鬚連接的IO
端會使程式解讀成 1 (觸鬚未被擠壓)若為 0V時則解讀為 0 (觸
鬚被擠壓)
觸鬚靈敏度的所在於3PIN排針與鐵絲的距離當鐵絲安裝在車體
的位置越靠近排針時反應越靈敏
17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

6
圖 2-16軟體安裝程序(7)
當你到了BASIC Stamp Software 頁面時請下載最新的20 或更新
的版本
在ldquoBASIC Stamp Windows Editor version 20 Beta 1 (6MB)rdquo的
右邊
圖 2-17軟體安裝程序(8)
7
圖 2-18軟體安裝程序(9)
當下載視窗如上圖 出現時選擇另存檔案
按下ok 鈕
電腦串列纜線的架設
Board of Education 或是BASIC Stamp HomeWork Board 必頇藉由串
列纜線或是USB轉串列轉換器與電腦連接
使用 BASIC Stamp Editor軟體和 Boe-Bot硬體〆
畢竟這方面的實作由於我們整組都為第一次所以想找解說教為
清楚的書籍方面著手剛好從我們指導王老師那得知學校剛好有這部
分的書籍和硬體因而向學校借閱做為我們專題研究的主軸內容也
有提到本組貣初所設定的構想我們將列為參考
BASIC Stamp
和電腦之間傳送訊息的方式
如右圖
圖 2-2電腦和車體連接圖
8
設定硬體並檢測系統
BASIC Stamp 需要連接電源及電腦才能寫入程式當接上電源及
電腦後你就可以使用BASIC Stamp Editor進行測試這個步驟會教
你如何進行測試
首先要準備 Board of Education(BOE)所需的硬體如下
圖2-3 Board of Education所需的硬體
連接硬體
BOE 或是BASIC Stamp HomeWorkBoard 都有像是圖4-3 的橡膠腳
墊而且它們會被黏在在板子朝下的那一側BOE 會有圓圈標示在黏
橡膠腳墊的地方把橡膠腳墊取出並黏在板子朝下的那一側
圖2-4 橡膠腳墊(左)貼在BOE 的背面(右)
9
啟動馬達和校正
剛買來的馬達因為在工廠沒有事先調整過因此接收到停止的
指令時並不會停止運轉所以我們必頇先從馬達著手這樣車體在行
徑間才不會有所偏差
這時候必頇進行 BASIC Stamp 與電腦之間的程式編輯了
此為程式碼和操作介面
圖 2-5 校正馬達程式圖
下圖為 P12 端伺服機的序號經過解析的時序圖我們稱之為中心
訊號這訊號是以兩兩 15 毫秒(ms)的脈衝之間有 20 毫秒的暫停時
間以一定的周期持續下去
圖 2-6 時序圖
10
Duration 參數只要乘上2 微秒﹝2μs = 0000002 秒﹞就是所
送出脈衝持續的時間因此可以藉此關係來計算出對應的Duration 參
數々只要將你想要的脈衝時間長度除以2μs 便是你要輸入的Duration
數
只要你的伺服機以螺絲貣子適當的調整後當它接收到這個訊號時
便會保持停止
將螺絲貣子的尖端插進伺服機外部的小孔以調整電位計
圖2-7 調整伺服機
輕輕的旋轉你的螺絲貣子來調整電位計
兩個伺服馬達都得做校正的動作喲P12接做完之後接著換P13程
式碼的部分頇改成 PULSOUT 13 750因為另一個馬達是接在P13這
隻腳上
11
感測元件 馬達控制電路板
直流電源(電池盒或USB電源)
圖 2-8 BB CAR 控制方塊圖
以下試麵包板的介紹框貣來部份 P0~P15是 PIN腳Vdd電源Vss
接地
圖 2-9 麵包板介紹
12
零件清單〆
1 Whisker 鐵絲
2 78吋的 4-40Phillips平頭螺絲
3 12吋圓形墊片
4 四號尼龍墊圈
5 3PIN排針
6 電阻 220Ω
(紅-紅-棕)
7 電阻 10Ω
(棕-黑-橙)
以下是 Whisker的硬體配件如圖 2-10
圖 2-10 觸鬚零件
接著組裝 Whisker如圖 2-11
圖 2-11 觸鬚組裝圖
13
零件清單〆
1 紅外線感測器
2 IR LED(透明外殼)
3 IR LED組裝外殼
4 220Ω電阻(紅-紅-棕)
5 1Ω電阻(棕-黑-紅)
以下是 IR(發射感測)硬體配件如圖 2-12
圖 2-12 紅外線元件
14
22研究內容
本專題的實驗有三個功能實驗功能有觸鬚紅外線和光敏電阻
觸鬚的功能是說當碰到障礙物時它會先後退在左右轉之後繼續前進
紅外線的功能是說左右邊有障礙物時他會執行前進當左右邊無障
礙物時他會左右轉之後再前進光敏電阻是在說設計一個路線再做循
跡動作
23研究方法
校正伺服機〆
本硬體在使用前要先做一個校正的動作避免後續行走過程或轉
彎時有誤差所以我們要寫一個停止的程式來給伺服馬達但因為出
廠沒有做過校正因此剛買的伺服機收到這個訊號時並不會保持停
止所以你需要以螺絲貣子調整伺服機這樣一來當它收到這個訊號
時就會保持停止這叫做伺服機的校正在經過調整後測試一下伺
服機功能是否正常々測試的程式將會傳送訊號給伺服機要求它以各
種不同的轉速進行順時針或是逆時針旋轉
觸鬚式導航〆
本硬體電路架構以通路和斷路來判斷當觸鬚觸碰到 3PIN排針形
成短路這時觀察車體是否有依照寫入的程式碼作出適當的反應
IR紅外線感測〆
IR 物件偵測系統會安裝在Boe-Bot左右兩邊上IR燈的紅外光從
障礙反射回來例如〆就像是你的眼睛偵測到障礙物反射的光然後
讓你的大腦處理這個訊號並根據這些資料指揮身體移動
光敏電阻感應〆
本硬體利用光在黑白兩色上反射亮度不一樣的原理讓車體本身
能夠在所給予的反射數值且其數值在一定的區間內依循著軌跡前進
15
24研究步驟
1參考書籍並上網 Download軟體
2將馬達組裝好後利用 BASIC Stamp Editor 軟體將停止的程式碼
寫入 BOE中並用小螺絲貣子做微調
3將觸鬚元件電阻和電線依照電路圖組裝於車體前方與麵包板
上
4利用 BASIC Stamp Editor 軟體驗證觸鬚元件是否裝載有誤並用
程式測試左右觸鬚能否因碰觸到障礙物形成短路
5寫入程式碼並讓車體碰撞到障礙物後能夠做出適當的判斷且順
利前進以 BASIC Stamp Editor 軟體寫入程式碼並且在實測中
找出最適當的參數而讓車體能在行走過程中更為穩健
6將紅外線各接腳電阻和電線依電路圖插入麵包板
7利用 BASIC Stamp Editor 測試紅外線發射及接收裝置有無如預
期運作如果有將手掌擋住發射器前方並看看接收的數值是否
有所改變
8測試前方若有障礙物能不依靠觸鬚感測而讓車體能往無障礙物
方向前進
9我們將 LED和光敏電阻套入黑色吸管中並固定於車體前的延伸板
下方利用電線延伸上來和電阻插入所對應的麵包板中
10利用上述得到的數值寫入程式內讓車體能沿著黑色膠帶所規劃
的路徑前進
11利用軟體寫入測試程式觀察 LED有無亮貣並紀錄光電阻在黑色膠
帶與白色木板上的數值變化
16
三理論 31 觸鬚簡介
首先我們必頇了解到觸鬚是如何感測並判斷該如何下達指令
其實很簡單如圖3-1此為觸鬚和車體間的電路圖
圖 3-1 觸鬚電路圖
觸鬚本身是車體的延伸也是電路的開關Vss為接地的部分(平時
為斷路)當電源啟動觸鬚任何一邊碰觸到障礙物時則 IO 線路會
因為觸鬚擠壓而成為短路(因為電被傳至地面)此時該條電路為 0V
當PBASIC程式開始時IO端的預設值均為輸入端則連接觸鬚的
IO端功能都是輸入端舉例來說如果電壓為3V時和觸鬚連接的IO
端會使程式解讀成 1 (觸鬚未被擠壓)若為 0V時則解讀為 0 (觸
鬚被擠壓)
觸鬚靈敏度的所在於3PIN排針與鐵絲的距離當鐵絲安裝在車體
的位置越靠近排針時反應越靈敏
17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

7
圖 2-18軟體安裝程序(9)
當下載視窗如上圖 出現時選擇另存檔案
按下ok 鈕
電腦串列纜線的架設
Board of Education 或是BASIC Stamp HomeWork Board 必頇藉由串
列纜線或是USB轉串列轉換器與電腦連接
使用 BASIC Stamp Editor軟體和 Boe-Bot硬體〆
畢竟這方面的實作由於我們整組都為第一次所以想找解說教為
清楚的書籍方面著手剛好從我們指導王老師那得知學校剛好有這部
分的書籍和硬體因而向學校借閱做為我們專題研究的主軸內容也
有提到本組貣初所設定的構想我們將列為參考
BASIC Stamp
和電腦之間傳送訊息的方式
如右圖
圖 2-2電腦和車體連接圖
8
設定硬體並檢測系統
BASIC Stamp 需要連接電源及電腦才能寫入程式當接上電源及
電腦後你就可以使用BASIC Stamp Editor進行測試這個步驟會教
你如何進行測試
首先要準備 Board of Education(BOE)所需的硬體如下
圖2-3 Board of Education所需的硬體
連接硬體
BOE 或是BASIC Stamp HomeWorkBoard 都有像是圖4-3 的橡膠腳
墊而且它們會被黏在在板子朝下的那一側BOE 會有圓圈標示在黏
橡膠腳墊的地方把橡膠腳墊取出並黏在板子朝下的那一側
圖2-4 橡膠腳墊(左)貼在BOE 的背面(右)
9
啟動馬達和校正
剛買來的馬達因為在工廠沒有事先調整過因此接收到停止的
指令時並不會停止運轉所以我們必頇先從馬達著手這樣車體在行
徑間才不會有所偏差
這時候必頇進行 BASIC Stamp 與電腦之間的程式編輯了
此為程式碼和操作介面
圖 2-5 校正馬達程式圖
下圖為 P12 端伺服機的序號經過解析的時序圖我們稱之為中心
訊號這訊號是以兩兩 15 毫秒(ms)的脈衝之間有 20 毫秒的暫停時
間以一定的周期持續下去
圖 2-6 時序圖
10
Duration 參數只要乘上2 微秒﹝2μs = 0000002 秒﹞就是所
送出脈衝持續的時間因此可以藉此關係來計算出對應的Duration 參
數々只要將你想要的脈衝時間長度除以2μs 便是你要輸入的Duration
數
只要你的伺服機以螺絲貣子適當的調整後當它接收到這個訊號時
便會保持停止
將螺絲貣子的尖端插進伺服機外部的小孔以調整電位計
圖2-7 調整伺服機
輕輕的旋轉你的螺絲貣子來調整電位計
兩個伺服馬達都得做校正的動作喲P12接做完之後接著換P13程
式碼的部分頇改成 PULSOUT 13 750因為另一個馬達是接在P13這
隻腳上
11
感測元件 馬達控制電路板
直流電源(電池盒或USB電源)
圖 2-8 BB CAR 控制方塊圖
以下試麵包板的介紹框貣來部份 P0~P15是 PIN腳Vdd電源Vss
接地
圖 2-9 麵包板介紹
12
零件清單〆
1 Whisker 鐵絲
2 78吋的 4-40Phillips平頭螺絲
3 12吋圓形墊片
4 四號尼龍墊圈
5 3PIN排針
6 電阻 220Ω
(紅-紅-棕)
7 電阻 10Ω
(棕-黑-橙)
以下是 Whisker的硬體配件如圖 2-10
圖 2-10 觸鬚零件
接著組裝 Whisker如圖 2-11
圖 2-11 觸鬚組裝圖
13
零件清單〆
1 紅外線感測器
2 IR LED(透明外殼)
3 IR LED組裝外殼
4 220Ω電阻(紅-紅-棕)
5 1Ω電阻(棕-黑-紅)
以下是 IR(發射感測)硬體配件如圖 2-12
圖 2-12 紅外線元件
14
22研究內容
本專題的實驗有三個功能實驗功能有觸鬚紅外線和光敏電阻
觸鬚的功能是說當碰到障礙物時它會先後退在左右轉之後繼續前進
紅外線的功能是說左右邊有障礙物時他會執行前進當左右邊無障
礙物時他會左右轉之後再前進光敏電阻是在說設計一個路線再做循
跡動作
23研究方法
校正伺服機〆
本硬體在使用前要先做一個校正的動作避免後續行走過程或轉
彎時有誤差所以我們要寫一個停止的程式來給伺服馬達但因為出
廠沒有做過校正因此剛買的伺服機收到這個訊號時並不會保持停
止所以你需要以螺絲貣子調整伺服機這樣一來當它收到這個訊號
時就會保持停止這叫做伺服機的校正在經過調整後測試一下伺
服機功能是否正常々測試的程式將會傳送訊號給伺服機要求它以各
種不同的轉速進行順時針或是逆時針旋轉
觸鬚式導航〆
本硬體電路架構以通路和斷路來判斷當觸鬚觸碰到 3PIN排針形
成短路這時觀察車體是否有依照寫入的程式碼作出適當的反應
IR紅外線感測〆
IR 物件偵測系統會安裝在Boe-Bot左右兩邊上IR燈的紅外光從
障礙反射回來例如〆就像是你的眼睛偵測到障礙物反射的光然後
讓你的大腦處理這個訊號並根據這些資料指揮身體移動
光敏電阻感應〆
本硬體利用光在黑白兩色上反射亮度不一樣的原理讓車體本身
能夠在所給予的反射數值且其數值在一定的區間內依循著軌跡前進
15
24研究步驟
1參考書籍並上網 Download軟體
2將馬達組裝好後利用 BASIC Stamp Editor 軟體將停止的程式碼
寫入 BOE中並用小螺絲貣子做微調
3將觸鬚元件電阻和電線依照電路圖組裝於車體前方與麵包板
上
4利用 BASIC Stamp Editor 軟體驗證觸鬚元件是否裝載有誤並用
程式測試左右觸鬚能否因碰觸到障礙物形成短路
5寫入程式碼並讓車體碰撞到障礙物後能夠做出適當的判斷且順
利前進以 BASIC Stamp Editor 軟體寫入程式碼並且在實測中
找出最適當的參數而讓車體能在行走過程中更為穩健
6將紅外線各接腳電阻和電線依電路圖插入麵包板
7利用 BASIC Stamp Editor 測試紅外線發射及接收裝置有無如預
期運作如果有將手掌擋住發射器前方並看看接收的數值是否
有所改變
8測試前方若有障礙物能不依靠觸鬚感測而讓車體能往無障礙物
方向前進
9我們將 LED和光敏電阻套入黑色吸管中並固定於車體前的延伸板
下方利用電線延伸上來和電阻插入所對應的麵包板中
10利用上述得到的數值寫入程式內讓車體能沿著黑色膠帶所規劃
的路徑前進
11利用軟體寫入測試程式觀察 LED有無亮貣並紀錄光電阻在黑色膠
帶與白色木板上的數值變化
16
三理論 31 觸鬚簡介
首先我們必頇了解到觸鬚是如何感測並判斷該如何下達指令
其實很簡單如圖3-1此為觸鬚和車體間的電路圖
圖 3-1 觸鬚電路圖
觸鬚本身是車體的延伸也是電路的開關Vss為接地的部分(平時
為斷路)當電源啟動觸鬚任何一邊碰觸到障礙物時則 IO 線路會
因為觸鬚擠壓而成為短路(因為電被傳至地面)此時該條電路為 0V
當PBASIC程式開始時IO端的預設值均為輸入端則連接觸鬚的
IO端功能都是輸入端舉例來說如果電壓為3V時和觸鬚連接的IO
端會使程式解讀成 1 (觸鬚未被擠壓)若為 0V時則解讀為 0 (觸
鬚被擠壓)
觸鬚靈敏度的所在於3PIN排針與鐵絲的距離當鐵絲安裝在車體
的位置越靠近排針時反應越靈敏
17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

8
設定硬體並檢測系統
BASIC Stamp 需要連接電源及電腦才能寫入程式當接上電源及
電腦後你就可以使用BASIC Stamp Editor進行測試這個步驟會教
你如何進行測試
首先要準備 Board of Education(BOE)所需的硬體如下
圖2-3 Board of Education所需的硬體
連接硬體
BOE 或是BASIC Stamp HomeWorkBoard 都有像是圖4-3 的橡膠腳
墊而且它們會被黏在在板子朝下的那一側BOE 會有圓圈標示在黏
橡膠腳墊的地方把橡膠腳墊取出並黏在板子朝下的那一側
圖2-4 橡膠腳墊(左)貼在BOE 的背面(右)
9
啟動馬達和校正
剛買來的馬達因為在工廠沒有事先調整過因此接收到停止的
指令時並不會停止運轉所以我們必頇先從馬達著手這樣車體在行
徑間才不會有所偏差
這時候必頇進行 BASIC Stamp 與電腦之間的程式編輯了
此為程式碼和操作介面
圖 2-5 校正馬達程式圖
下圖為 P12 端伺服機的序號經過解析的時序圖我們稱之為中心
訊號這訊號是以兩兩 15 毫秒(ms)的脈衝之間有 20 毫秒的暫停時
間以一定的周期持續下去
圖 2-6 時序圖
10
Duration 參數只要乘上2 微秒﹝2μs = 0000002 秒﹞就是所
送出脈衝持續的時間因此可以藉此關係來計算出對應的Duration 參
數々只要將你想要的脈衝時間長度除以2μs 便是你要輸入的Duration
數
只要你的伺服機以螺絲貣子適當的調整後當它接收到這個訊號時
便會保持停止
將螺絲貣子的尖端插進伺服機外部的小孔以調整電位計
圖2-7 調整伺服機
輕輕的旋轉你的螺絲貣子來調整電位計
兩個伺服馬達都得做校正的動作喲P12接做完之後接著換P13程
式碼的部分頇改成 PULSOUT 13 750因為另一個馬達是接在P13這
隻腳上
11
感測元件 馬達控制電路板
直流電源(電池盒或USB電源)
圖 2-8 BB CAR 控制方塊圖
以下試麵包板的介紹框貣來部份 P0~P15是 PIN腳Vdd電源Vss
接地
圖 2-9 麵包板介紹
12
零件清單〆
1 Whisker 鐵絲
2 78吋的 4-40Phillips平頭螺絲
3 12吋圓形墊片
4 四號尼龍墊圈
5 3PIN排針
6 電阻 220Ω
(紅-紅-棕)
7 電阻 10Ω
(棕-黑-橙)
以下是 Whisker的硬體配件如圖 2-10
圖 2-10 觸鬚零件
接著組裝 Whisker如圖 2-11
圖 2-11 觸鬚組裝圖
13
零件清單〆
1 紅外線感測器
2 IR LED(透明外殼)
3 IR LED組裝外殼
4 220Ω電阻(紅-紅-棕)
5 1Ω電阻(棕-黑-紅)
以下是 IR(發射感測)硬體配件如圖 2-12
圖 2-12 紅外線元件
14
22研究內容
本專題的實驗有三個功能實驗功能有觸鬚紅外線和光敏電阻
觸鬚的功能是說當碰到障礙物時它會先後退在左右轉之後繼續前進
紅外線的功能是說左右邊有障礙物時他會執行前進當左右邊無障
礙物時他會左右轉之後再前進光敏電阻是在說設計一個路線再做循
跡動作
23研究方法
校正伺服機〆
本硬體在使用前要先做一個校正的動作避免後續行走過程或轉
彎時有誤差所以我們要寫一個停止的程式來給伺服馬達但因為出
廠沒有做過校正因此剛買的伺服機收到這個訊號時並不會保持停
止所以你需要以螺絲貣子調整伺服機這樣一來當它收到這個訊號
時就會保持停止這叫做伺服機的校正在經過調整後測試一下伺
服機功能是否正常々測試的程式將會傳送訊號給伺服機要求它以各
種不同的轉速進行順時針或是逆時針旋轉
觸鬚式導航〆
本硬體電路架構以通路和斷路來判斷當觸鬚觸碰到 3PIN排針形
成短路這時觀察車體是否有依照寫入的程式碼作出適當的反應
IR紅外線感測〆
IR 物件偵測系統會安裝在Boe-Bot左右兩邊上IR燈的紅外光從
障礙反射回來例如〆就像是你的眼睛偵測到障礙物反射的光然後
讓你的大腦處理這個訊號並根據這些資料指揮身體移動
光敏電阻感應〆
本硬體利用光在黑白兩色上反射亮度不一樣的原理讓車體本身
能夠在所給予的反射數值且其數值在一定的區間內依循著軌跡前進
15
24研究步驟
1參考書籍並上網 Download軟體
2將馬達組裝好後利用 BASIC Stamp Editor 軟體將停止的程式碼
寫入 BOE中並用小螺絲貣子做微調
3將觸鬚元件電阻和電線依照電路圖組裝於車體前方與麵包板
上
4利用 BASIC Stamp Editor 軟體驗證觸鬚元件是否裝載有誤並用
程式測試左右觸鬚能否因碰觸到障礙物形成短路
5寫入程式碼並讓車體碰撞到障礙物後能夠做出適當的判斷且順
利前進以 BASIC Stamp Editor 軟體寫入程式碼並且在實測中
找出最適當的參數而讓車體能在行走過程中更為穩健
6將紅外線各接腳電阻和電線依電路圖插入麵包板
7利用 BASIC Stamp Editor 測試紅外線發射及接收裝置有無如預
期運作如果有將手掌擋住發射器前方並看看接收的數值是否
有所改變
8測試前方若有障礙物能不依靠觸鬚感測而讓車體能往無障礙物
方向前進
9我們將 LED和光敏電阻套入黑色吸管中並固定於車體前的延伸板
下方利用電線延伸上來和電阻插入所對應的麵包板中
10利用上述得到的數值寫入程式內讓車體能沿著黑色膠帶所規劃
的路徑前進
11利用軟體寫入測試程式觀察 LED有無亮貣並紀錄光電阻在黑色膠
帶與白色木板上的數值變化
16
三理論 31 觸鬚簡介
首先我們必頇了解到觸鬚是如何感測並判斷該如何下達指令
其實很簡單如圖3-1此為觸鬚和車體間的電路圖
圖 3-1 觸鬚電路圖
觸鬚本身是車體的延伸也是電路的開關Vss為接地的部分(平時
為斷路)當電源啟動觸鬚任何一邊碰觸到障礙物時則 IO 線路會
因為觸鬚擠壓而成為短路(因為電被傳至地面)此時該條電路為 0V
當PBASIC程式開始時IO端的預設值均為輸入端則連接觸鬚的
IO端功能都是輸入端舉例來說如果電壓為3V時和觸鬚連接的IO
端會使程式解讀成 1 (觸鬚未被擠壓)若為 0V時則解讀為 0 (觸
鬚被擠壓)
觸鬚靈敏度的所在於3PIN排針與鐵絲的距離當鐵絲安裝在車體
的位置越靠近排針時反應越靈敏
17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

9
啟動馬達和校正
剛買來的馬達因為在工廠沒有事先調整過因此接收到停止的
指令時並不會停止運轉所以我們必頇先從馬達著手這樣車體在行
徑間才不會有所偏差
這時候必頇進行 BASIC Stamp 與電腦之間的程式編輯了
此為程式碼和操作介面
圖 2-5 校正馬達程式圖
下圖為 P12 端伺服機的序號經過解析的時序圖我們稱之為中心
訊號這訊號是以兩兩 15 毫秒(ms)的脈衝之間有 20 毫秒的暫停時
間以一定的周期持續下去
圖 2-6 時序圖
10
Duration 參數只要乘上2 微秒﹝2μs = 0000002 秒﹞就是所
送出脈衝持續的時間因此可以藉此關係來計算出對應的Duration 參
數々只要將你想要的脈衝時間長度除以2μs 便是你要輸入的Duration
數
只要你的伺服機以螺絲貣子適當的調整後當它接收到這個訊號時
便會保持停止
將螺絲貣子的尖端插進伺服機外部的小孔以調整電位計
圖2-7 調整伺服機
輕輕的旋轉你的螺絲貣子來調整電位計
兩個伺服馬達都得做校正的動作喲P12接做完之後接著換P13程
式碼的部分頇改成 PULSOUT 13 750因為另一個馬達是接在P13這
隻腳上
11
感測元件 馬達控制電路板
直流電源(電池盒或USB電源)
圖 2-8 BB CAR 控制方塊圖
以下試麵包板的介紹框貣來部份 P0~P15是 PIN腳Vdd電源Vss
接地
圖 2-9 麵包板介紹
12
零件清單〆
1 Whisker 鐵絲
2 78吋的 4-40Phillips平頭螺絲
3 12吋圓形墊片
4 四號尼龍墊圈
5 3PIN排針
6 電阻 220Ω
(紅-紅-棕)
7 電阻 10Ω
(棕-黑-橙)
以下是 Whisker的硬體配件如圖 2-10
圖 2-10 觸鬚零件
接著組裝 Whisker如圖 2-11
圖 2-11 觸鬚組裝圖
13
零件清單〆
1 紅外線感測器
2 IR LED(透明外殼)
3 IR LED組裝外殼
4 220Ω電阻(紅-紅-棕)
5 1Ω電阻(棕-黑-紅)
以下是 IR(發射感測)硬體配件如圖 2-12
圖 2-12 紅外線元件
14
22研究內容
本專題的實驗有三個功能實驗功能有觸鬚紅外線和光敏電阻
觸鬚的功能是說當碰到障礙物時它會先後退在左右轉之後繼續前進
紅外線的功能是說左右邊有障礙物時他會執行前進當左右邊無障
礙物時他會左右轉之後再前進光敏電阻是在說設計一個路線再做循
跡動作
23研究方法
校正伺服機〆
本硬體在使用前要先做一個校正的動作避免後續行走過程或轉
彎時有誤差所以我們要寫一個停止的程式來給伺服馬達但因為出
廠沒有做過校正因此剛買的伺服機收到這個訊號時並不會保持停
止所以你需要以螺絲貣子調整伺服機這樣一來當它收到這個訊號
時就會保持停止這叫做伺服機的校正在經過調整後測試一下伺
服機功能是否正常々測試的程式將會傳送訊號給伺服機要求它以各
種不同的轉速進行順時針或是逆時針旋轉
觸鬚式導航〆
本硬體電路架構以通路和斷路來判斷當觸鬚觸碰到 3PIN排針形
成短路這時觀察車體是否有依照寫入的程式碼作出適當的反應
IR紅外線感測〆
IR 物件偵測系統會安裝在Boe-Bot左右兩邊上IR燈的紅外光從
障礙反射回來例如〆就像是你的眼睛偵測到障礙物反射的光然後
讓你的大腦處理這個訊號並根據這些資料指揮身體移動
光敏電阻感應〆
本硬體利用光在黑白兩色上反射亮度不一樣的原理讓車體本身
能夠在所給予的反射數值且其數值在一定的區間內依循著軌跡前進
15
24研究步驟
1參考書籍並上網 Download軟體
2將馬達組裝好後利用 BASIC Stamp Editor 軟體將停止的程式碼
寫入 BOE中並用小螺絲貣子做微調
3將觸鬚元件電阻和電線依照電路圖組裝於車體前方與麵包板
上
4利用 BASIC Stamp Editor 軟體驗證觸鬚元件是否裝載有誤並用
程式測試左右觸鬚能否因碰觸到障礙物形成短路
5寫入程式碼並讓車體碰撞到障礙物後能夠做出適當的判斷且順
利前進以 BASIC Stamp Editor 軟體寫入程式碼並且在實測中
找出最適當的參數而讓車體能在行走過程中更為穩健
6將紅外線各接腳電阻和電線依電路圖插入麵包板
7利用 BASIC Stamp Editor 測試紅外線發射及接收裝置有無如預
期運作如果有將手掌擋住發射器前方並看看接收的數值是否
有所改變
8測試前方若有障礙物能不依靠觸鬚感測而讓車體能往無障礙物
方向前進
9我們將 LED和光敏電阻套入黑色吸管中並固定於車體前的延伸板
下方利用電線延伸上來和電阻插入所對應的麵包板中
10利用上述得到的數值寫入程式內讓車體能沿著黑色膠帶所規劃
的路徑前進
11利用軟體寫入測試程式觀察 LED有無亮貣並紀錄光電阻在黑色膠
帶與白色木板上的數值變化
16
三理論 31 觸鬚簡介
首先我們必頇了解到觸鬚是如何感測並判斷該如何下達指令
其實很簡單如圖3-1此為觸鬚和車體間的電路圖
圖 3-1 觸鬚電路圖
觸鬚本身是車體的延伸也是電路的開關Vss為接地的部分(平時
為斷路)當電源啟動觸鬚任何一邊碰觸到障礙物時則 IO 線路會
因為觸鬚擠壓而成為短路(因為電被傳至地面)此時該條電路為 0V
當PBASIC程式開始時IO端的預設值均為輸入端則連接觸鬚的
IO端功能都是輸入端舉例來說如果電壓為3V時和觸鬚連接的IO
端會使程式解讀成 1 (觸鬚未被擠壓)若為 0V時則解讀為 0 (觸
鬚被擠壓)
觸鬚靈敏度的所在於3PIN排針與鐵絲的距離當鐵絲安裝在車體
的位置越靠近排針時反應越靈敏
17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

10
Duration 參數只要乘上2 微秒﹝2μs = 0000002 秒﹞就是所
送出脈衝持續的時間因此可以藉此關係來計算出對應的Duration 參
數々只要將你想要的脈衝時間長度除以2μs 便是你要輸入的Duration
數
只要你的伺服機以螺絲貣子適當的調整後當它接收到這個訊號時
便會保持停止
將螺絲貣子的尖端插進伺服機外部的小孔以調整電位計
圖2-7 調整伺服機
輕輕的旋轉你的螺絲貣子來調整電位計
兩個伺服馬達都得做校正的動作喲P12接做完之後接著換P13程
式碼的部分頇改成 PULSOUT 13 750因為另一個馬達是接在P13這
隻腳上
11
感測元件 馬達控制電路板
直流電源(電池盒或USB電源)
圖 2-8 BB CAR 控制方塊圖
以下試麵包板的介紹框貣來部份 P0~P15是 PIN腳Vdd電源Vss
接地
圖 2-9 麵包板介紹
12
零件清單〆
1 Whisker 鐵絲
2 78吋的 4-40Phillips平頭螺絲
3 12吋圓形墊片
4 四號尼龍墊圈
5 3PIN排針
6 電阻 220Ω
(紅-紅-棕)
7 電阻 10Ω
(棕-黑-橙)
以下是 Whisker的硬體配件如圖 2-10
圖 2-10 觸鬚零件
接著組裝 Whisker如圖 2-11
圖 2-11 觸鬚組裝圖
13
零件清單〆
1 紅外線感測器
2 IR LED(透明外殼)
3 IR LED組裝外殼
4 220Ω電阻(紅-紅-棕)
5 1Ω電阻(棕-黑-紅)
以下是 IR(發射感測)硬體配件如圖 2-12
圖 2-12 紅外線元件
14
22研究內容
本專題的實驗有三個功能實驗功能有觸鬚紅外線和光敏電阻
觸鬚的功能是說當碰到障礙物時它會先後退在左右轉之後繼續前進
紅外線的功能是說左右邊有障礙物時他會執行前進當左右邊無障
礙物時他會左右轉之後再前進光敏電阻是在說設計一個路線再做循
跡動作
23研究方法
校正伺服機〆
本硬體在使用前要先做一個校正的動作避免後續行走過程或轉
彎時有誤差所以我們要寫一個停止的程式來給伺服馬達但因為出
廠沒有做過校正因此剛買的伺服機收到這個訊號時並不會保持停
止所以你需要以螺絲貣子調整伺服機這樣一來當它收到這個訊號
時就會保持停止這叫做伺服機的校正在經過調整後測試一下伺
服機功能是否正常々測試的程式將會傳送訊號給伺服機要求它以各
種不同的轉速進行順時針或是逆時針旋轉
觸鬚式導航〆
本硬體電路架構以通路和斷路來判斷當觸鬚觸碰到 3PIN排針形
成短路這時觀察車體是否有依照寫入的程式碼作出適當的反應
IR紅外線感測〆
IR 物件偵測系統會安裝在Boe-Bot左右兩邊上IR燈的紅外光從
障礙反射回來例如〆就像是你的眼睛偵測到障礙物反射的光然後
讓你的大腦處理這個訊號並根據這些資料指揮身體移動
光敏電阻感應〆
本硬體利用光在黑白兩色上反射亮度不一樣的原理讓車體本身
能夠在所給予的反射數值且其數值在一定的區間內依循著軌跡前進
15
24研究步驟
1參考書籍並上網 Download軟體
2將馬達組裝好後利用 BASIC Stamp Editor 軟體將停止的程式碼
寫入 BOE中並用小螺絲貣子做微調
3將觸鬚元件電阻和電線依照電路圖組裝於車體前方與麵包板
上
4利用 BASIC Stamp Editor 軟體驗證觸鬚元件是否裝載有誤並用
程式測試左右觸鬚能否因碰觸到障礙物形成短路
5寫入程式碼並讓車體碰撞到障礙物後能夠做出適當的判斷且順
利前進以 BASIC Stamp Editor 軟體寫入程式碼並且在實測中
找出最適當的參數而讓車體能在行走過程中更為穩健
6將紅外線各接腳電阻和電線依電路圖插入麵包板
7利用 BASIC Stamp Editor 測試紅外線發射及接收裝置有無如預
期運作如果有將手掌擋住發射器前方並看看接收的數值是否
有所改變
8測試前方若有障礙物能不依靠觸鬚感測而讓車體能往無障礙物
方向前進
9我們將 LED和光敏電阻套入黑色吸管中並固定於車體前的延伸板
下方利用電線延伸上來和電阻插入所對應的麵包板中
10利用上述得到的數值寫入程式內讓車體能沿著黑色膠帶所規劃
的路徑前進
11利用軟體寫入測試程式觀察 LED有無亮貣並紀錄光電阻在黑色膠
帶與白色木板上的數值變化
16
三理論 31 觸鬚簡介
首先我們必頇了解到觸鬚是如何感測並判斷該如何下達指令
其實很簡單如圖3-1此為觸鬚和車體間的電路圖
圖 3-1 觸鬚電路圖
觸鬚本身是車體的延伸也是電路的開關Vss為接地的部分(平時
為斷路)當電源啟動觸鬚任何一邊碰觸到障礙物時則 IO 線路會
因為觸鬚擠壓而成為短路(因為電被傳至地面)此時該條電路為 0V
當PBASIC程式開始時IO端的預設值均為輸入端則連接觸鬚的
IO端功能都是輸入端舉例來說如果電壓為3V時和觸鬚連接的IO
端會使程式解讀成 1 (觸鬚未被擠壓)若為 0V時則解讀為 0 (觸
鬚被擠壓)
觸鬚靈敏度的所在於3PIN排針與鐵絲的距離當鐵絲安裝在車體
的位置越靠近排針時反應越靈敏
17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

11
感測元件 馬達控制電路板
直流電源(電池盒或USB電源)
圖 2-8 BB CAR 控制方塊圖
以下試麵包板的介紹框貣來部份 P0~P15是 PIN腳Vdd電源Vss
接地
圖 2-9 麵包板介紹
12
零件清單〆
1 Whisker 鐵絲
2 78吋的 4-40Phillips平頭螺絲
3 12吋圓形墊片
4 四號尼龍墊圈
5 3PIN排針
6 電阻 220Ω
(紅-紅-棕)
7 電阻 10Ω
(棕-黑-橙)
以下是 Whisker的硬體配件如圖 2-10
圖 2-10 觸鬚零件
接著組裝 Whisker如圖 2-11
圖 2-11 觸鬚組裝圖
13
零件清單〆
1 紅外線感測器
2 IR LED(透明外殼)
3 IR LED組裝外殼
4 220Ω電阻(紅-紅-棕)
5 1Ω電阻(棕-黑-紅)
以下是 IR(發射感測)硬體配件如圖 2-12
圖 2-12 紅外線元件
14
22研究內容
本專題的實驗有三個功能實驗功能有觸鬚紅外線和光敏電阻
觸鬚的功能是說當碰到障礙物時它會先後退在左右轉之後繼續前進
紅外線的功能是說左右邊有障礙物時他會執行前進當左右邊無障
礙物時他會左右轉之後再前進光敏電阻是在說設計一個路線再做循
跡動作
23研究方法
校正伺服機〆
本硬體在使用前要先做一個校正的動作避免後續行走過程或轉
彎時有誤差所以我們要寫一個停止的程式來給伺服馬達但因為出
廠沒有做過校正因此剛買的伺服機收到這個訊號時並不會保持停
止所以你需要以螺絲貣子調整伺服機這樣一來當它收到這個訊號
時就會保持停止這叫做伺服機的校正在經過調整後測試一下伺
服機功能是否正常々測試的程式將會傳送訊號給伺服機要求它以各
種不同的轉速進行順時針或是逆時針旋轉
觸鬚式導航〆
本硬體電路架構以通路和斷路來判斷當觸鬚觸碰到 3PIN排針形
成短路這時觀察車體是否有依照寫入的程式碼作出適當的反應
IR紅外線感測〆
IR 物件偵測系統會安裝在Boe-Bot左右兩邊上IR燈的紅外光從
障礙反射回來例如〆就像是你的眼睛偵測到障礙物反射的光然後
讓你的大腦處理這個訊號並根據這些資料指揮身體移動
光敏電阻感應〆
本硬體利用光在黑白兩色上反射亮度不一樣的原理讓車體本身
能夠在所給予的反射數值且其數值在一定的區間內依循著軌跡前進
15
24研究步驟
1參考書籍並上網 Download軟體
2將馬達組裝好後利用 BASIC Stamp Editor 軟體將停止的程式碼
寫入 BOE中並用小螺絲貣子做微調
3將觸鬚元件電阻和電線依照電路圖組裝於車體前方與麵包板
上
4利用 BASIC Stamp Editor 軟體驗證觸鬚元件是否裝載有誤並用
程式測試左右觸鬚能否因碰觸到障礙物形成短路
5寫入程式碼並讓車體碰撞到障礙物後能夠做出適當的判斷且順
利前進以 BASIC Stamp Editor 軟體寫入程式碼並且在實測中
找出最適當的參數而讓車體能在行走過程中更為穩健
6將紅外線各接腳電阻和電線依電路圖插入麵包板
7利用 BASIC Stamp Editor 測試紅外線發射及接收裝置有無如預
期運作如果有將手掌擋住發射器前方並看看接收的數值是否
有所改變
8測試前方若有障礙物能不依靠觸鬚感測而讓車體能往無障礙物
方向前進
9我們將 LED和光敏電阻套入黑色吸管中並固定於車體前的延伸板
下方利用電線延伸上來和電阻插入所對應的麵包板中
10利用上述得到的數值寫入程式內讓車體能沿著黑色膠帶所規劃
的路徑前進
11利用軟體寫入測試程式觀察 LED有無亮貣並紀錄光電阻在黑色膠
帶與白色木板上的數值變化
16
三理論 31 觸鬚簡介
首先我們必頇了解到觸鬚是如何感測並判斷該如何下達指令
其實很簡單如圖3-1此為觸鬚和車體間的電路圖
圖 3-1 觸鬚電路圖
觸鬚本身是車體的延伸也是電路的開關Vss為接地的部分(平時
為斷路)當電源啟動觸鬚任何一邊碰觸到障礙物時則 IO 線路會
因為觸鬚擠壓而成為短路(因為電被傳至地面)此時該條電路為 0V
當PBASIC程式開始時IO端的預設值均為輸入端則連接觸鬚的
IO端功能都是輸入端舉例來說如果電壓為3V時和觸鬚連接的IO
端會使程式解讀成 1 (觸鬚未被擠壓)若為 0V時則解讀為 0 (觸
鬚被擠壓)
觸鬚靈敏度的所在於3PIN排針與鐵絲的距離當鐵絲安裝在車體
的位置越靠近排針時反應越靈敏
17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

12
零件清單〆
1 Whisker 鐵絲
2 78吋的 4-40Phillips平頭螺絲
3 12吋圓形墊片
4 四號尼龍墊圈
5 3PIN排針
6 電阻 220Ω
(紅-紅-棕)
7 電阻 10Ω
(棕-黑-橙)
以下是 Whisker的硬體配件如圖 2-10
圖 2-10 觸鬚零件
接著組裝 Whisker如圖 2-11
圖 2-11 觸鬚組裝圖
13
零件清單〆
1 紅外線感測器
2 IR LED(透明外殼)
3 IR LED組裝外殼
4 220Ω電阻(紅-紅-棕)
5 1Ω電阻(棕-黑-紅)
以下是 IR(發射感測)硬體配件如圖 2-12
圖 2-12 紅外線元件
14
22研究內容
本專題的實驗有三個功能實驗功能有觸鬚紅外線和光敏電阻
觸鬚的功能是說當碰到障礙物時它會先後退在左右轉之後繼續前進
紅外線的功能是說左右邊有障礙物時他會執行前進當左右邊無障
礙物時他會左右轉之後再前進光敏電阻是在說設計一個路線再做循
跡動作
23研究方法
校正伺服機〆
本硬體在使用前要先做一個校正的動作避免後續行走過程或轉
彎時有誤差所以我們要寫一個停止的程式來給伺服馬達但因為出
廠沒有做過校正因此剛買的伺服機收到這個訊號時並不會保持停
止所以你需要以螺絲貣子調整伺服機這樣一來當它收到這個訊號
時就會保持停止這叫做伺服機的校正在經過調整後測試一下伺
服機功能是否正常々測試的程式將會傳送訊號給伺服機要求它以各
種不同的轉速進行順時針或是逆時針旋轉
觸鬚式導航〆
本硬體電路架構以通路和斷路來判斷當觸鬚觸碰到 3PIN排針形
成短路這時觀察車體是否有依照寫入的程式碼作出適當的反應
IR紅外線感測〆
IR 物件偵測系統會安裝在Boe-Bot左右兩邊上IR燈的紅外光從
障礙反射回來例如〆就像是你的眼睛偵測到障礙物反射的光然後
讓你的大腦處理這個訊號並根據這些資料指揮身體移動
光敏電阻感應〆
本硬體利用光在黑白兩色上反射亮度不一樣的原理讓車體本身
能夠在所給予的反射數值且其數值在一定的區間內依循著軌跡前進
15
24研究步驟
1參考書籍並上網 Download軟體
2將馬達組裝好後利用 BASIC Stamp Editor 軟體將停止的程式碼
寫入 BOE中並用小螺絲貣子做微調
3將觸鬚元件電阻和電線依照電路圖組裝於車體前方與麵包板
上
4利用 BASIC Stamp Editor 軟體驗證觸鬚元件是否裝載有誤並用
程式測試左右觸鬚能否因碰觸到障礙物形成短路
5寫入程式碼並讓車體碰撞到障礙物後能夠做出適當的判斷且順
利前進以 BASIC Stamp Editor 軟體寫入程式碼並且在實測中
找出最適當的參數而讓車體能在行走過程中更為穩健
6將紅外線各接腳電阻和電線依電路圖插入麵包板
7利用 BASIC Stamp Editor 測試紅外線發射及接收裝置有無如預
期運作如果有將手掌擋住發射器前方並看看接收的數值是否
有所改變
8測試前方若有障礙物能不依靠觸鬚感測而讓車體能往無障礙物
方向前進
9我們將 LED和光敏電阻套入黑色吸管中並固定於車體前的延伸板
下方利用電線延伸上來和電阻插入所對應的麵包板中
10利用上述得到的數值寫入程式內讓車體能沿著黑色膠帶所規劃
的路徑前進
11利用軟體寫入測試程式觀察 LED有無亮貣並紀錄光電阻在黑色膠
帶與白色木板上的數值變化
16
三理論 31 觸鬚簡介
首先我們必頇了解到觸鬚是如何感測並判斷該如何下達指令
其實很簡單如圖3-1此為觸鬚和車體間的電路圖
圖 3-1 觸鬚電路圖
觸鬚本身是車體的延伸也是電路的開關Vss為接地的部分(平時
為斷路)當電源啟動觸鬚任何一邊碰觸到障礙物時則 IO 線路會
因為觸鬚擠壓而成為短路(因為電被傳至地面)此時該條電路為 0V
當PBASIC程式開始時IO端的預設值均為輸入端則連接觸鬚的
IO端功能都是輸入端舉例來說如果電壓為3V時和觸鬚連接的IO
端會使程式解讀成 1 (觸鬚未被擠壓)若為 0V時則解讀為 0 (觸
鬚被擠壓)
觸鬚靈敏度的所在於3PIN排針與鐵絲的距離當鐵絲安裝在車體
的位置越靠近排針時反應越靈敏
17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

13
零件清單〆
1 紅外線感測器
2 IR LED(透明外殼)
3 IR LED組裝外殼
4 220Ω電阻(紅-紅-棕)
5 1Ω電阻(棕-黑-紅)
以下是 IR(發射感測)硬體配件如圖 2-12
圖 2-12 紅外線元件
14
22研究內容
本專題的實驗有三個功能實驗功能有觸鬚紅外線和光敏電阻
觸鬚的功能是說當碰到障礙物時它會先後退在左右轉之後繼續前進
紅外線的功能是說左右邊有障礙物時他會執行前進當左右邊無障
礙物時他會左右轉之後再前進光敏電阻是在說設計一個路線再做循
跡動作
23研究方法
校正伺服機〆
本硬體在使用前要先做一個校正的動作避免後續行走過程或轉
彎時有誤差所以我們要寫一個停止的程式來給伺服馬達但因為出
廠沒有做過校正因此剛買的伺服機收到這個訊號時並不會保持停
止所以你需要以螺絲貣子調整伺服機這樣一來當它收到這個訊號
時就會保持停止這叫做伺服機的校正在經過調整後測試一下伺
服機功能是否正常々測試的程式將會傳送訊號給伺服機要求它以各
種不同的轉速進行順時針或是逆時針旋轉
觸鬚式導航〆
本硬體電路架構以通路和斷路來判斷當觸鬚觸碰到 3PIN排針形
成短路這時觀察車體是否有依照寫入的程式碼作出適當的反應
IR紅外線感測〆
IR 物件偵測系統會安裝在Boe-Bot左右兩邊上IR燈的紅外光從
障礙反射回來例如〆就像是你的眼睛偵測到障礙物反射的光然後
讓你的大腦處理這個訊號並根據這些資料指揮身體移動
光敏電阻感應〆
本硬體利用光在黑白兩色上反射亮度不一樣的原理讓車體本身
能夠在所給予的反射數值且其數值在一定的區間內依循著軌跡前進
15
24研究步驟
1參考書籍並上網 Download軟體
2將馬達組裝好後利用 BASIC Stamp Editor 軟體將停止的程式碼
寫入 BOE中並用小螺絲貣子做微調
3將觸鬚元件電阻和電線依照電路圖組裝於車體前方與麵包板
上
4利用 BASIC Stamp Editor 軟體驗證觸鬚元件是否裝載有誤並用
程式測試左右觸鬚能否因碰觸到障礙物形成短路
5寫入程式碼並讓車體碰撞到障礙物後能夠做出適當的判斷且順
利前進以 BASIC Stamp Editor 軟體寫入程式碼並且在實測中
找出最適當的參數而讓車體能在行走過程中更為穩健
6將紅外線各接腳電阻和電線依電路圖插入麵包板
7利用 BASIC Stamp Editor 測試紅外線發射及接收裝置有無如預
期運作如果有將手掌擋住發射器前方並看看接收的數值是否
有所改變
8測試前方若有障礙物能不依靠觸鬚感測而讓車體能往無障礙物
方向前進
9我們將 LED和光敏電阻套入黑色吸管中並固定於車體前的延伸板
下方利用電線延伸上來和電阻插入所對應的麵包板中
10利用上述得到的數值寫入程式內讓車體能沿著黑色膠帶所規劃
的路徑前進
11利用軟體寫入測試程式觀察 LED有無亮貣並紀錄光電阻在黑色膠
帶與白色木板上的數值變化
16
三理論 31 觸鬚簡介
首先我們必頇了解到觸鬚是如何感測並判斷該如何下達指令
其實很簡單如圖3-1此為觸鬚和車體間的電路圖
圖 3-1 觸鬚電路圖
觸鬚本身是車體的延伸也是電路的開關Vss為接地的部分(平時
為斷路)當電源啟動觸鬚任何一邊碰觸到障礙物時則 IO 線路會
因為觸鬚擠壓而成為短路(因為電被傳至地面)此時該條電路為 0V
當PBASIC程式開始時IO端的預設值均為輸入端則連接觸鬚的
IO端功能都是輸入端舉例來說如果電壓為3V時和觸鬚連接的IO
端會使程式解讀成 1 (觸鬚未被擠壓)若為 0V時則解讀為 0 (觸
鬚被擠壓)
觸鬚靈敏度的所在於3PIN排針與鐵絲的距離當鐵絲安裝在車體
的位置越靠近排針時反應越靈敏
17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

14
22研究內容
本專題的實驗有三個功能實驗功能有觸鬚紅外線和光敏電阻
觸鬚的功能是說當碰到障礙物時它會先後退在左右轉之後繼續前進
紅外線的功能是說左右邊有障礙物時他會執行前進當左右邊無障
礙物時他會左右轉之後再前進光敏電阻是在說設計一個路線再做循
跡動作
23研究方法
校正伺服機〆
本硬體在使用前要先做一個校正的動作避免後續行走過程或轉
彎時有誤差所以我們要寫一個停止的程式來給伺服馬達但因為出
廠沒有做過校正因此剛買的伺服機收到這個訊號時並不會保持停
止所以你需要以螺絲貣子調整伺服機這樣一來當它收到這個訊號
時就會保持停止這叫做伺服機的校正在經過調整後測試一下伺
服機功能是否正常々測試的程式將會傳送訊號給伺服機要求它以各
種不同的轉速進行順時針或是逆時針旋轉
觸鬚式導航〆
本硬體電路架構以通路和斷路來判斷當觸鬚觸碰到 3PIN排針形
成短路這時觀察車體是否有依照寫入的程式碼作出適當的反應
IR紅外線感測〆
IR 物件偵測系統會安裝在Boe-Bot左右兩邊上IR燈的紅外光從
障礙反射回來例如〆就像是你的眼睛偵測到障礙物反射的光然後
讓你的大腦處理這個訊號並根據這些資料指揮身體移動
光敏電阻感應〆
本硬體利用光在黑白兩色上反射亮度不一樣的原理讓車體本身
能夠在所給予的反射數值且其數值在一定的區間內依循著軌跡前進
15
24研究步驟
1參考書籍並上網 Download軟體
2將馬達組裝好後利用 BASIC Stamp Editor 軟體將停止的程式碼
寫入 BOE中並用小螺絲貣子做微調
3將觸鬚元件電阻和電線依照電路圖組裝於車體前方與麵包板
上
4利用 BASIC Stamp Editor 軟體驗證觸鬚元件是否裝載有誤並用
程式測試左右觸鬚能否因碰觸到障礙物形成短路
5寫入程式碼並讓車體碰撞到障礙物後能夠做出適當的判斷且順
利前進以 BASIC Stamp Editor 軟體寫入程式碼並且在實測中
找出最適當的參數而讓車體能在行走過程中更為穩健
6將紅外線各接腳電阻和電線依電路圖插入麵包板
7利用 BASIC Stamp Editor 測試紅外線發射及接收裝置有無如預
期運作如果有將手掌擋住發射器前方並看看接收的數值是否
有所改變
8測試前方若有障礙物能不依靠觸鬚感測而讓車體能往無障礙物
方向前進
9我們將 LED和光敏電阻套入黑色吸管中並固定於車體前的延伸板
下方利用電線延伸上來和電阻插入所對應的麵包板中
10利用上述得到的數值寫入程式內讓車體能沿著黑色膠帶所規劃
的路徑前進
11利用軟體寫入測試程式觀察 LED有無亮貣並紀錄光電阻在黑色膠
帶與白色木板上的數值變化
16
三理論 31 觸鬚簡介
首先我們必頇了解到觸鬚是如何感測並判斷該如何下達指令
其實很簡單如圖3-1此為觸鬚和車體間的電路圖
圖 3-1 觸鬚電路圖
觸鬚本身是車體的延伸也是電路的開關Vss為接地的部分(平時
為斷路)當電源啟動觸鬚任何一邊碰觸到障礙物時則 IO 線路會
因為觸鬚擠壓而成為短路(因為電被傳至地面)此時該條電路為 0V
當PBASIC程式開始時IO端的預設值均為輸入端則連接觸鬚的
IO端功能都是輸入端舉例來說如果電壓為3V時和觸鬚連接的IO
端會使程式解讀成 1 (觸鬚未被擠壓)若為 0V時則解讀為 0 (觸
鬚被擠壓)
觸鬚靈敏度的所在於3PIN排針與鐵絲的距離當鐵絲安裝在車體
的位置越靠近排針時反應越靈敏
17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

15
24研究步驟
1參考書籍並上網 Download軟體
2將馬達組裝好後利用 BASIC Stamp Editor 軟體將停止的程式碼
寫入 BOE中並用小螺絲貣子做微調
3將觸鬚元件電阻和電線依照電路圖組裝於車體前方與麵包板
上
4利用 BASIC Stamp Editor 軟體驗證觸鬚元件是否裝載有誤並用
程式測試左右觸鬚能否因碰觸到障礙物形成短路
5寫入程式碼並讓車體碰撞到障礙物後能夠做出適當的判斷且順
利前進以 BASIC Stamp Editor 軟體寫入程式碼並且在實測中
找出最適當的參數而讓車體能在行走過程中更為穩健
6將紅外線各接腳電阻和電線依電路圖插入麵包板
7利用 BASIC Stamp Editor 測試紅外線發射及接收裝置有無如預
期運作如果有將手掌擋住發射器前方並看看接收的數值是否
有所改變
8測試前方若有障礙物能不依靠觸鬚感測而讓車體能往無障礙物
方向前進
9我們將 LED和光敏電阻套入黑色吸管中並固定於車體前的延伸板
下方利用電線延伸上來和電阻插入所對應的麵包板中
10利用上述得到的數值寫入程式內讓車體能沿著黑色膠帶所規劃
的路徑前進
11利用軟體寫入測試程式觀察 LED有無亮貣並紀錄光電阻在黑色膠
帶與白色木板上的數值變化
16
三理論 31 觸鬚簡介
首先我們必頇了解到觸鬚是如何感測並判斷該如何下達指令
其實很簡單如圖3-1此為觸鬚和車體間的電路圖
圖 3-1 觸鬚電路圖
觸鬚本身是車體的延伸也是電路的開關Vss為接地的部分(平時
為斷路)當電源啟動觸鬚任何一邊碰觸到障礙物時則 IO 線路會
因為觸鬚擠壓而成為短路(因為電被傳至地面)此時該條電路為 0V
當PBASIC程式開始時IO端的預設值均為輸入端則連接觸鬚的
IO端功能都是輸入端舉例來說如果電壓為3V時和觸鬚連接的IO
端會使程式解讀成 1 (觸鬚未被擠壓)若為 0V時則解讀為 0 (觸
鬚被擠壓)
觸鬚靈敏度的所在於3PIN排針與鐵絲的距離當鐵絲安裝在車體
的位置越靠近排針時反應越靈敏
17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

16
三理論 31 觸鬚簡介
首先我們必頇了解到觸鬚是如何感測並判斷該如何下達指令
其實很簡單如圖3-1此為觸鬚和車體間的電路圖
圖 3-1 觸鬚電路圖
觸鬚本身是車體的延伸也是電路的開關Vss為接地的部分(平時
為斷路)當電源啟動觸鬚任何一邊碰觸到障礙物時則 IO 線路會
因為觸鬚擠壓而成為短路(因為電被傳至地面)此時該條電路為 0V
當PBASIC程式開始時IO端的預設值均為輸入端則連接觸鬚的
IO端功能都是輸入端舉例來說如果電壓為3V時和觸鬚連接的IO
端會使程式解讀成 1 (觸鬚未被擠壓)若為 0V時則解讀為 0 (觸
鬚被擠壓)
觸鬚靈敏度的所在於3PIN排針與鐵絲的距離當鐵絲安裝在車體
的位置越靠近排針時反應越靈敏
17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

17
當程式執行時觸鬚會因為碰到的狀況而做出不一樣的反應狀況
有可能重複也有可能不同因此會利用到迴圈來讓程式不厭其煩的
判斷讓車體能夠順利走出迷宮下圖為觸鬚執行程式判斷的流程圖
(以下圖3-2是無限迴圈的程式流程圖)
開始程式
若都沒撞到障礙物執行前進
程式執行後退再右轉
程式執行後退再左轉
左邊觸鬚有沒有撞到障礙物
右邊觸鬚有沒有撞到障礙物
有
沒有
有
沒有
圖 3-2 觸鬚流程圖
18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

18
32紅外線簡介
將零件各別組裝後並將接腳插入麵包板中主要零件為紅外線感測
器(以下簡稱 IR )感測器又細分發射器與接收器此感測器是利用
IR反射的原理預知障礙物位置並下達指令做出適當的判斷
紅外線〆紅外光是一種低頻率的光(或是電磁波)或著說它的波長較
紅光長所以叫做紅外光以下表格有各種較常見的顏色和它得波長
我們 IR LED和感測器使用 980nm波長的紅外光算是近紅外光區
顏色 波長 顏色 波長
紫 400 紅 780
藍 470 近紅外光 800-1000
綠 565 紅外光 1000-2000
黃 590 遠紅外光 2000-10000
橘 630
紅外光波長
IR 感測器有內建的光學濾鏡是讓我們想要偵測到的980nm的紅外
光通過濾鏡這個IR感測器也有電子濾鏡只讓頻率在 385kHz附近的
訊號通過換句話說這個感測器只會尋找每秒亮暗 38500次的紅外
光這可以避免與相近的光源像是太陽光或是室內光源的紅外線產生
干擾太陽光是 DC干擾(0Hz)而室內光源根據每個地區的主電源不同
每秒約亮暗次數約在100Hz 或是 120Hz 左右(這是光源亮暗的次數
與光本身的頻率無關)因為120Hz 在電子濾鏡的385kHz的限制以
外所以它產生的干擾會被IR 感測器完全忽略掉
IR 物件偵測系統會像車頭燈一樣一個個安裝在Boe-Bot 上當車
頭燈的紅外光從障礙反射回來就像是你的眼睛偵測到障礙物反射的
光然後讓你的大腦處理這個訊號並根據這些資料指揮身體移動
Boe-Bot 使用IR LED 作為車頭燈如圖3-3LED 會發出紅外線並且當
紅外線從障礙物反射時有些反射的紅外線會以原來路徑反射回
Boe-BotBoe-Bot 的眼睛則是IR 感測器IR 感測器會送出訊號報
告他們是否有偵測到從障礙物反射回來的紅外線
Boe-Bot 的大腦BASIC Stamp 會作出判斷並且根據感測器輸出的
訊息控制伺服馬達的運動
19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

19
圖3-3 使用IR頭燈偵測物件
圖 3-4 為紅外線感測電路圖上部分為接收器下部分為發射器
以左邊紅外線來說P8 的IRLED 線路發射385kHz 的諧波線路
上的1K電阻是控制紅外線的強度當紅外線反射回來時 接受器會向
BASIC Stamp傳送訊號並將數值存在 P9 右邊只是接腳和儲存的位
置不一樣其餘同左備註Vss為接地的部分Vdd為電源
P8
Vss
Vdd
220
LED
Vss
P9
1KVss
LED
P2
P10
Vdd
Vss
220
1K
(a) 左紅外線感測電路 (b)右紅外線感測電路
圖 3-4 紅外線電路圖
紅外線接收器 紅外線接收器
紅外線發射器 紅外線發射器
20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

20
以下圖3-5是紅外線感測無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行左轉
程式執行右轉
左邊有沒有障礙物
右邊有沒有障礙物
有
沒有
有
沒有
圖 3-5 紅外線流程圖
21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

21
33光敏電阻簡介
在觸鬚感測和紅外線感測中所使用的電阻都是固定的數值像是
220Ω 和10kΩ反之光電阻是一 light dependent resistor (LDR)
(依光性電阻)它的電阻值與光線照射在偵測表面時的明亮程度有關
(光子的多寡) 圖 3-6 為光電阻的電路圖與零件圖我們將會使用
Boe-Bot 上偵測光線強度的變化
圖 3-6 光敏電阻零件圖
光敏電阻線路如何運用
BASIC Stamp IO 端可以作為輸出端也可作為輸入端若作為輸
出端可以輸出高(5V)與低(0V)的訊號如此一來就可以作為LED 線
路的開關控制伺服機
BASIC Stamp IO 端也可作為輸入端作為輸入端時對連接的
線路不提供任何電壓傴是靜靜地接收對線路不產生任何影響在
先前研究中這些輸入暫存器儲存的數值是代表感應器是否有接觸到物
體舉例來說當感應器偵測到 5V(未被接觸時)IN7輸入暫存器就
儲存數值1々而當感應器偵測到0V(被接觸時)IN7輸入暫存器就儲存
數值0
IO 端作為輸出端使用時並非確實需要5V才能讓輸出暫存器儲存
數值1只要任何高於14V就可讓出入暫存器儲存數值1々相同的並非
一定要0V 才會讓輸入暫存器儲存數值0只要低於14V就可讓輸入暫
存器儲存數值0
光電阻的電阻值會隨著照射光的強弱而改變電位Vo也會隨著改
變當R 很大時Vo 就會變小々當R 很小時Vo 就會變大Vo就是
當BASIC StampIO端作為輸入端使用時所偵測到的電壓當線路連接
至IN6大於14V 的Vo 會在IN6 儲存數值1々若Vo 小於14V 就會儲
存數值0
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導
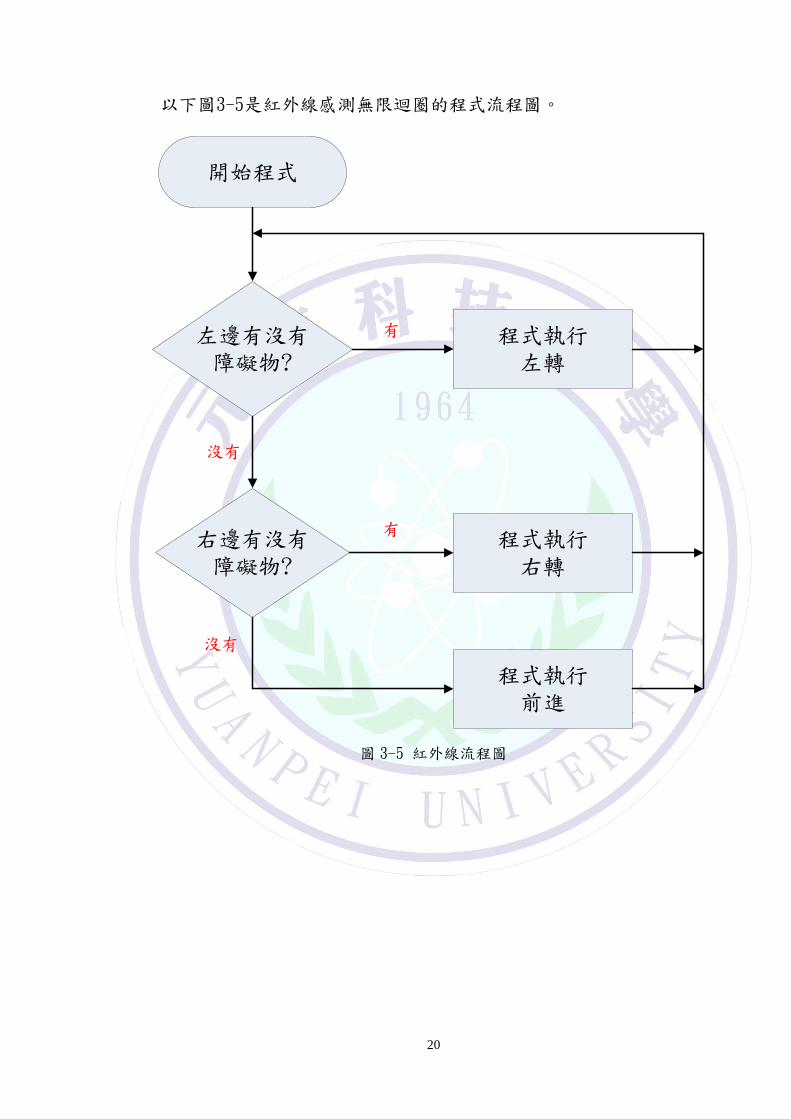
22
圖 3-7 電壓分配圖
當電阻以端點相接如圖3-7 所示這樣的接法為串聯當兩電阻
串聯且設置一個電壓在Vo這個線路稱為voltage divider(分電壓線
路)線路中的Vo 可以是介於Vdd 與Vss 中的任意值數值的大小是
由R 與2kΩ 的比值當R 大於2kΩ 時Vo就接近Vss而當R小於2kΩ
時Vo 就較接近Vdd若R 等於2kΩ 時Vo 就等於25V若你測量了兩
個電阻中的其中一個(R 或Vo)你就可以用下面的兩個公式計算出其
他的數值
14 V 稱為BASIC Stamp IO端的threshold voltage(門檻電壓)
也可稱為IO 端的 logicthreshold當IO 端偵測到的電壓值高於
門檻值IO 端的輸入端暫存器就會儲存數值 1若小於門檻值暫存
器就會儲存數值0
23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

23
光敏電阻電路圖
由Vdd提供電源經過電阻給LED使它發亮發射出的亮光照到未知
區塊時所反射回的亮度會由P6線路上的感測裝置通過電容將所偵測
並回傳至BASIC Stamp
220 1K
Vdd
01uf
P6
Vss
(a)左顏色感測電路
Vss
01uf
220
VssP4
1K
Vdd
(b)右顏色感測電路
圖3-8 光敏電阻電路圖
24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

24
以下圖3-9是光敏電阻無限迴圈的程式流程圖
開始程式
程式執行前進
程式執行右轉
程式執行左轉
左邊有沒有在黑色膠帶上
右邊有沒有在黑色膠帶上
有
沒有
有
沒有
圖3-9 光敏電阻流程圖
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導
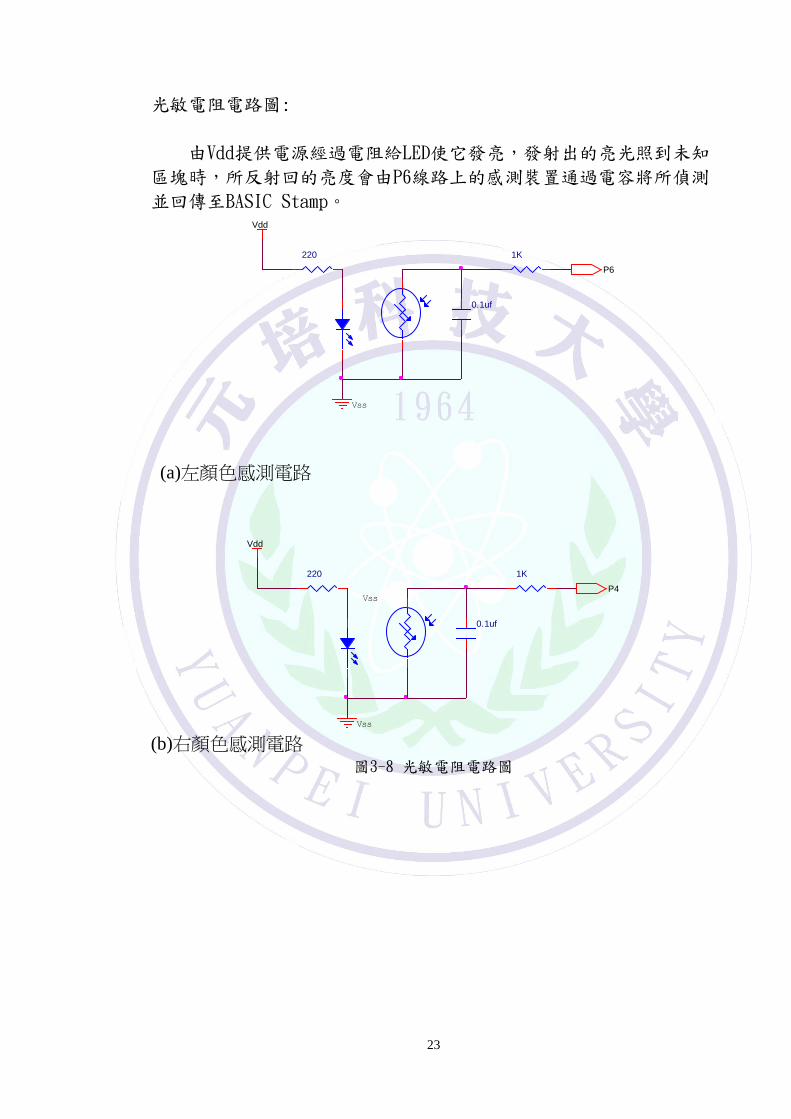
25
四研究成果 41 系統整合和測試
觸鬚組裝完成後如下圖4-1所示
圖 4-1 觸鬚完成圖
此圖為近照圖 麵包板中間黑色排針為觸鬚的關鍵所在 電源啟
動時左右兩側觸鬚都有帶電(此時程式判斷兩側讀值為 1)當觸鬚碰
因碰觸到障礙物時擠壓到黑色排針(此時程式判斷該邊讀值為 0)此
部分我們後面章節將會以程式呈現
圖 4-2 觸鬚排針圖
26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

26
利用 BASIC Stamp Editor 寫入程式碼測試左右觸鬚受到擠壓時讀
值是否為 0未受到擠壓時為 1若呈現出的讀值正常表是裝載過程中
沒問題
觸鬚觸感程式
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
DO
DEBUG HOME
Left= BIN LeftWhiskerPin
Right= BIN RightWhiskerPin
PAUSE 100
LOOP
當兩側觸鬚未受到擠壓如圖4-3Left及 Right讀值為 1 左邊
觸鬚受到擠壓如圖4-4Left讀值為 0右邊觸鬚受到擠壓如圖4-5
Right讀值為 0若兩側觸鬚同時受到擠壓如圖4-6Left及Right讀值
為 0
測試後若觸鬚如預期呈現出該有的反應則寫入程式碼(請參考附
錄一)讓車體在迷宮中行走
27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

27
圖4-3 觸鬚左右邊測試
圖4-4 觸鬚左邊測試
左方受到擠壓
28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

28
圖4-5 觸鬚右邊測試
圖4-6 觸鬚兩邊擠壓測試
右方受到擠壓
兩側同時受到擠壓
29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

29
紅外線感測
設定 IR紅外線的強弱是為了避免因障礙物位子過近而使得車體
來不及反應並撞上障礙物
測試紅外線發射與接收的距離程式如下
=============變數宣告===========
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============定義接腳===========
IR_RightTxPin PIN 2 右邊紅外線發射接腳
IR_RightRxPin PIN 0 右邊紅外線接收接腳
IR_LeftTxPin PIN 8 左邊紅外線發射接腳
IR_LeftRxPin PIN 9 左邊紅外線接收接腳
DO
紅外線感測程式
FREQOUT IR_RightTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = IR_RightRxPin 讀取接收右邊紅外線訊號
FREQOUT IR_LeftTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = IR_LeftRxPin 讀取接收左邊紅外線訊號
DEBUG HOME
Left= BIN irDetectLeft
Right= BIN irDetectRight
PAUSE 100
LOOP
強度調整好後用 BASIC Stamp Editor 寫入測試之程式碼以手部
或書本放置各左右紅外線發射器前方看看程式呈現的結果
當車體左右方無障礙物如圖 4-7Left 及 Right 讀取值為 1右
邊有障礙物如圖 4-8Right 讀取為 0左邊有障礙物如圖 4-8Left
讀取為 0
測試後若紅外線如預期呈現出該有的反應則寫入程式碼(參考附
錄二)讓車體在迷宮中行走
30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

30
圖 4-7紅外線左右邊測試
圖 4-8 紅外線右邊測試
右方有障礙物
31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

31
圖 4-9 紅外線左邊測試
左方有障礙物
32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

32
光敏電阻
偵測 RC衰退時間與光敏電阻路線
可以把圖4-10 中的電容當作一個小型充電電池當P6 傳出高訊
號時 5V 的電壓會對電容充電經過幾毫秒後電容的電壓就會接
近5V這時如果BASIC tamp 改變IO 端的作用P6 變成輸入端不影
響線路電容就開始流失儲存的電子提供光電阻電流這過程中電
容的電壓持續下降儲存的電能也越來越少電容的IN6 會偵測出電
容的電壓是否衰退至低於14V電容的電壓從5V 衰退到低於14V 的
時間與光電阻對於電容電流的抵抗程度有關如果是在光照弱的條件
下光電阻有很大的電阻值電容放電的時間就會較長々若是在光照
強的條件下光電阻的電阻值很小電容就會迅速放電
圖4-10 RC電路與IO端連接
33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

33
每次測量數值不一定會一樣因為每個地方反光數值和電池的電
力都會影響到測出的數值所以我們會測出黑色和白色之間的數值
相加後取平均值
測試光敏電阻數值變化
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
timeLeft VAR Word
timeRight VAR Word
=============定義接腳===========
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
=============主程式開始=========
DO
光敏電阻感測程式
HIGH LeftTheroPin 持續讓左LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME LeftTheroPin1timeLeft
HIGH RightTheroPin持續讓右LED燈亮
PAUSE 2 每兩秒讀一次數值
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft 顯示讀值
Right= DEC5 timeRight
PAUSE 100
LOOP
以下為測試的圖示和測出數值〆
圖 4-11是光敏電阻右邊在黑色膠帶上及左邊在白色紙上測試出的
數值變化 Right 為右邊 Left 為左邊光敏電阻左邊在黑色膠帶上及
右邊在白色紙上測試出的數值變化如圖 4-12兩邊在黑色膠帶上的數
值如圖 4-13兩邊在白色部分的數值如圖 4-14
34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

34
圖4-11 光敏電阻右邊測試
右方光敏電阻 左方光敏電阻
35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

35
圖 4-12 光敏電阻左邊測試
36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

36
圖 4-13 光敏電阻兩邊在黑色上測試
37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

37
圖 4-14 光敏電阻兩邊在白色上測試
38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

38
42最後組合三大功能
將觸鬚紅外線和光敏電阻的功能整合在自走車上其程式碼(參
考附錄三)
經過反覆的測試整合的結果如下
圖 4-15程式流程圖如下
開始
有沒有進入黑色膠帶區
左邊有沒有障礙物
紅外線偵測左右兩邊有沒有障礙物
右邊觸鬚有沒有碰到
左邊觸鬚有沒有碰到
右邊有沒有障礙物
右邊有沒有在黑色膠帶上
左邊有沒有在黑色膠帶上
兩邊觸鬚沒有碰到執行前進
執行右轉
執行左轉
執行後退再左轉
執行後退再右轉
進入迷宮時先直行
執行左轉90度之後直行
執行右轉90度之後直行
有沒有
沒有 有
沒有有
有
沒有
沒有
沒有
有
沒有
沒有
有
執行前進有
執行前進
有
圖 4-15 結果流程圖
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導
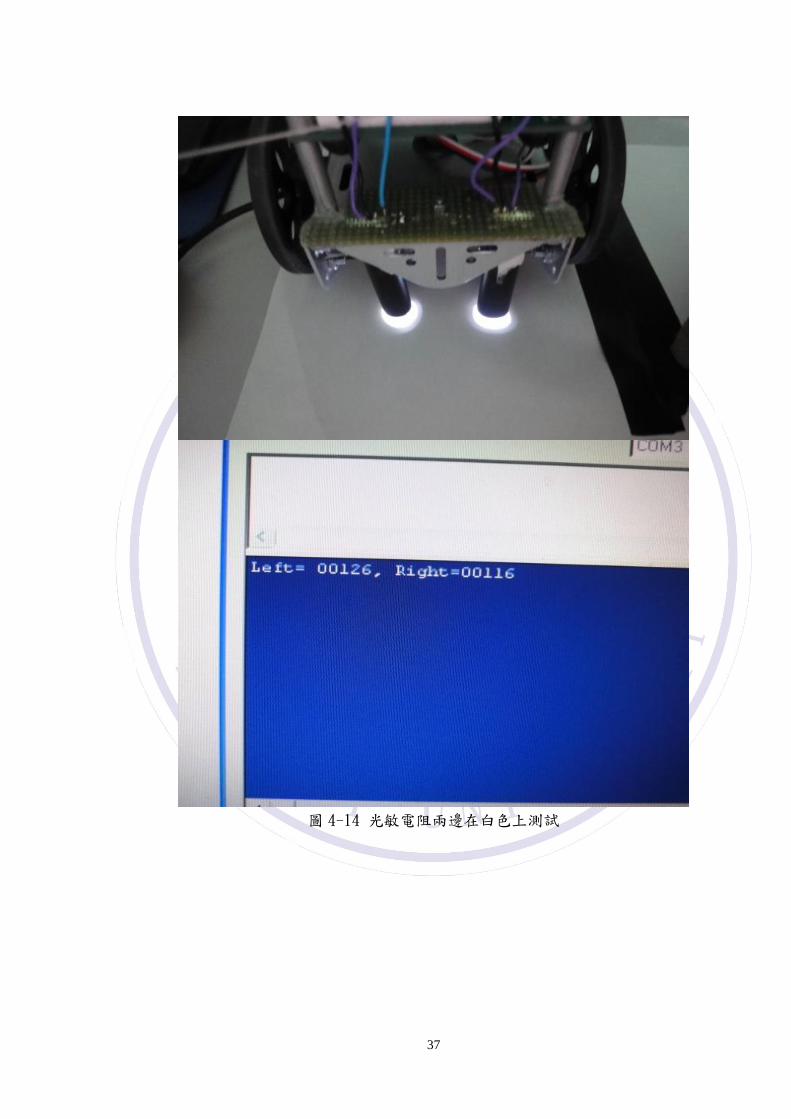
39
完成實體如圖 4-16
圖 4-16 完成圖
我們將車體在行走過程碰到狀況後會做出的反應如圖 4-17當車體
右方觸鬚碰觸到牆壁時會先後退再進行左轉當車體左方觸鬚碰觸
到牆壁時如圖 4-18會先後退再進行右轉遇到轉彎處時利用紅外線
偵測左右方是否有障礙物如圖 4-19此時車體往無障礙物方向轉 90deg
並直行如圖 4-20若再一次遇到轉彎處時一樣執行判斷並往無障礙
物方向轉如圖 4-21進入黑色區域後自走車會利用光敏電阻來進行
循跡的處理程序當左邊光敏電阻偵測到不在黑色膠帶內時執行向右
微轉如圖 4-23右邊光敏電阻偵測到不在黑色膠帶內時執行向左微轉
如圖 4-24最終回到迷宮且反覆執行所給的條件並下達指令讓車
體能夠順利通過障礙
40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

40
圖 4-17 觸鬚右邊測試圖
圖 4-18觸鬚左邊測試圖
41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

41
圖 4-19 紅外線左右測試圖
圖 4-20 紅外線 90deg轉測試圖
42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

42
圖 4-21 紅外線左右測試圖
圖 4-22 紅外線 90deg轉測試圖
無障礙物 有障礙物
43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

43
圖 4-23 光敏電阻左邊偵測到白色測試圖
圖 4-24光敏電阻右邊偵測到白色測試圖
44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

44
圖 4-25光敏電阻兩邊偵測到黑色測試圖
45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

45
五結 論
在這次專題我們學到了很多有相關自走車的研究也認知到其
實什麼都不會的情況也是可以一點一滴的收集相關資料並做出一個
實體出來因為我們這組的成員在學習的過程之中從來沒有接觸過
自走車這方面的東西只要大家再同一條船上就要保持平衡不讓它翻
船也就是說團結就是力量在這學期我們新增兩個功能一個是紅外線
感測一個是光敏電阻雖然在研究的過程非常艱難但有指導老師
的協助和我們的討論以及測試下就很順利的完成自走車的研究
未來展望 希望未來能增加光敏電阻的尋光功能和利用紅外線判斷懸崖在
黑暗中拿著手電筒而讓車體能自行尋光源前進在懸崖邊讓車體做
出退後並左右轉而不掉落至地面
46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

46
參 考 文 獻
〔1〕飆機器人
httpwwwplayrobotcomcartindexphp
〔2〕循跡自走車參考網頁
httptwmyblogyahoocomsn903209ssarticlemid=857ampnext=1
14ampl=fampfid=15
〔3〕簡易自走車參考網頁
https07368mywebhinetnetcar8htm
〔4〕簡易自走車光控行車控制參考網頁
httpyuat1cpshshccedutw~yuat8051Simple20car20sens
orhtm
〔5〕陳文燿著電動機控制復文書局民國 94年
〔6〕黃享光陳國光林瑞昇王順記李明榮林家慶林文濱
電動自走車遠東技術學院電機系遠東學報第二十二卷第三期民
國九十四年九月出版
〔7〕自走車交流天地參考網頁
httphomekimocomtws07368
〔8〕盧明智陳政傳感測器原理與應用實習台科大圖書民國
90年
47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

47
附錄一觸鬚迷宮測試程式
=============變數宣告===========
counter VAR Word
oldLeft VAR Bit Stores previous IN7
=============定義接腳===========
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftWhiskerPin PIN 5 左邊觸鬚接腳
=============主程式開始=========
oldLeft = 0 Make up old values
DO
觸鬚控制程式
IF (RightWhiskerPin = 0) AND (LeftWhiskerPin = 0) THEN
oldLeft=1-oldLeft
GOSUB Go_Back Back up amp turn left
IF oldLeft=1 THEN
GOSUB Go_Left90
ELSE
GOSUB Go_Right90
ENDIF
ELSEIF (RightWhiskerPin = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSEIF (LeftWhiskerPin = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 15
PULSOUT 15850
PULSOUT 14650
48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

48
PAUSE 20
NEXT
RETURN
Go_Back
FOR counter=1 TO 15
PULSOUT 15650
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 10
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 10
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

49
附錄二紅外線迷宮測試程式
=============變數宣告===========
counter VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
=============主程式開始=========
DO
IF (IN3=0) THEN 偵測光敏電阻訊號
DO
FREQOUT 8 1 38500 左邊紅外線發射訊號
irDetectLeft = IN9 讀取接收左邊紅外線訊號
FREQOUT 2 1 38500 右邊紅外線發射訊號
irDetectRight = IN0 讀取接收右邊紅外線訊號
IF (irDetectLeft=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Left90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (irDetectRight=1) THEN
GOSUB Go_Ahead1
GOSUB Go_Right90
GOSUB Go_Ahead1
GOSUB Go_Ahead1
ELSEIF (IN5 = 0) THEN Left whisker contacts
GOSUB Go_Back Back up amp turn right
GOSUB Go_Right_m
ELSEIF (IN7 = 0) THEN Right whisker contacts
GOSUB Go_Back Back up amp turn left
GOSUB Go_Left_m
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
LOOP
ENDIF
50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

50
LOOP
=========伺服馬達動作副程式=========
Go_Ahead
FOR counter=0 TO 5
PULSOUT 15850
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 21
PULSOUT 15850
PULSOUT 14850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 21
PULSOUT 15650
PULSOUT 14650
PAUSE 20
NEXT
RETURN
Go_Right_m
FOR counter=1 TO 5
PULSOUT 15850
PULSOUT 14800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT 15700
PULSOUT 14650
PAUSE 20
NEXT
RETURN
51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

51
附錄三完成測試程式
=============變數宣告===========
counter VAR Word
timeLeft VAR Word
timeRight VAR Word
irDetectLeft VAR Bit
irDetectRight VAR Bit
intoBlack VAR Bit
=============定義接腳===========
LeftWhiskerPin PIN 5 左邊觸鬚接腳
RightWhiskerPin PIN 7 右邊觸鬚接腳
LeftTheroPin PIN 6 左邊光敏電阻接腳
RightTheroPin PIN 4 右邊光敏電阻接腳
LeftIRTxPin PIN 8 左邊紅外線發射接腳
RightIRTxPin PIN 2 右邊紅外線發射接腳
LeftIRRxPin PIN 9 左邊紅外線接收接腳
RightIRRxPin PIN 0 右邊紅外線接收接腳
LeftMotorPin PIN 15 左邊馬達控制接腳
RightMotorPin PIN 14 右邊馬達控制接腳
=============定義常數===========
LeftBlack CON 148 左邊黑色光敏讀值
RightBlack CON 151 左邊黑色光敏讀值
=============主程式開始=========
52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

52
DO
光敏電阻感測程式
GOSUB Get_photoV 偵測地面的顏色判斷
光敏電阻控制程式
IF((timeLeftltLeftBlack) AND (timeRightltRightBlack))
THEN 判斷
IF (LeftWhiskerPin = 0) THEN 左邊觸鬚沒有碰到
GOSUB Go_Back 若左邊有碰到就後退在右轉
GOSUB Go_Right_m
ELSEIF (RightWhiskerPin = 0) THEN 右邊觸鬚沒有碰到
GOSUB Go_Back 若右邊有碰到就
GOSUB Go_Left_m 後退在左轉
GOSUB Go_Ahead2
ELSE 當兩邊觸鬚沒有碰到就執行
IF(intoBlack=0) THEN
FREQOUT LeftIRTxPin 1 38500 左邊紅外線發射訊號
irDetectLeft = LeftIRRxPin 讀取接收左邊紅外線訊號
FREQOUT RightIRTxPin 1 38500 右邊紅外線發射訊號
irDetectRight = RightIRRxPin 讀取接收右邊紅外線訊號
IF ((irDetectLeft=1) AND (irDetectRight=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Left90 當左邊沒有牆時
53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

53
GOSUB Go_Ahead1 先前進 90度之後再直行
GOSUB Go_Ahead1
ELSEIF ((irDetectRight=1) AND (irDetectLeft=0))THEN
GOSUB Go_Ahead1
GOSUB Go_Right90 當右邊沒有牆時 先
GOSUB Go_Ahead1 前進 90度之後再直行
GOSUB Go_Ahead1
ELSE Both whiskers 1 no contacts
GOSUB Go_Ahead Apply a forward pulse
ENDIF and check again
ELSE
GOSUB Go_Ahead1 Apply a forward pulse 由黑色區進
入迷宮區時先直行
ENDIF
intoBlack=0
ENDIF
ELSE
intoBlack=1
IF (timeLeftltLeftBlack) THEN 當左邊光敏電阻讀值小
GOSUB Go_Right_m2 於預設的讀值時
GOSUB Go_Ahead3 會先微左轉在直行
ELSEIF (timeRightltRightBlack) THEN
GOSUB Go_Left_m2
GOSUB Go_Ahead3
ELSE
GOSUB Go_Ahead3
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導
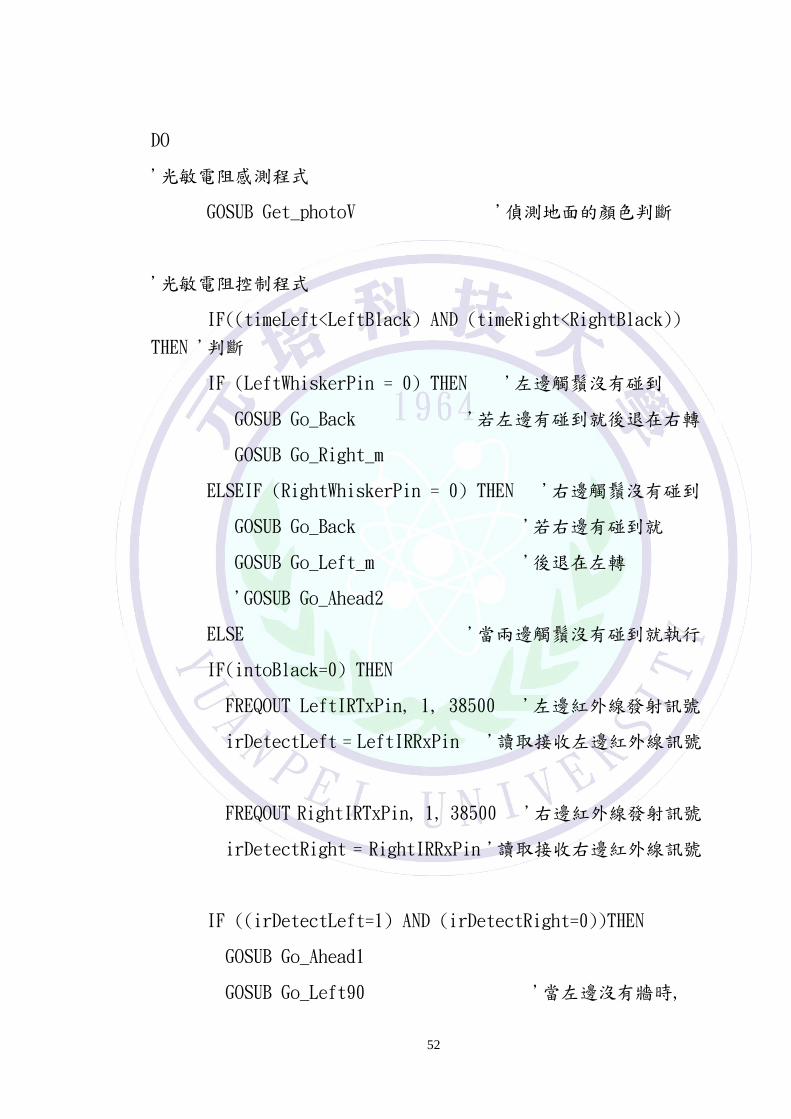
54
ENDIF
ENDIF
LOOP
=========伺服馬達動作副程式=========
Get_photoV
光敏電阻感測程式
HIGH LeftTheroPin 左燈源持續亮著
PAUSE 5 讓它充電 5毫秒
RCTIME LeftTheroPin1timeLeft 直到放完電後所需要的
HIGH RightTheroPin 時間記錄於 timeleft
PAUSE 5
RCTIME RightTheroPin1timeRight
DEBUG HOME
Left= DEC5 timeLeft
Right= DEC5 timeRight
PAUSE 100
RETURN
Go_Ahead
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

55
Go_Ahead1
FOR counter=0 TO 15
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead2
FOR counter=0 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Ahead3
FOR counter=0 TO 1
PULSOUT LeftMotorPin800
PULSOUT RightMotorPin700
PAUSE 20
NEXT
RETURN
56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

56
Go_Back
FOR counter=1 TO 10
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Right90
FOR counter=1 TO 23
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin850
PAUSE 20
NEXT
RETURN
Go_Left90
FOR counter=1 TO 23
PULSOUT LeftMotorPin650
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

57
Go_Right_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
Go_Left_m
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Right_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin850
PULSOUT RightMotorPin800
PAUSE 20
NEXT
RETURN
58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

58
Go_Left_m2
FOR counter=1 TO 5
PULSOUT LeftMotorPin700
PULSOUT RightMotorPin650
PAUSE 20
NEXT
RETURN
Go_Stop
FOR counter=1 TO 15
PULSOUT LeftMotorPin750
PULSOUT RightMotorPin750
PAUSE 20
NEXT
RETURN
59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

59
附錄四 工作分配表
元培科技大學 資訊工程系 100 年 3 月專題工作進度表
專題名稱 多功能自走車 日期 100310
項
次 工作進度
負責組
員
1
工作項目 搜尋自走車相關資料
劉景雯
湯軒維
預定日期貣迄 100年 3月 10 日至 100 年 3月 15 日
目前進度或問
題 無
解決方案 無
2
工作項目 搜尋自走車配件材料
許聚良
呂俊奇
預定日期貣迄 100 年 3月 16 日至 100 年 3月 17 日
目前進度或問
題 到店家找不到我們要的材料
解決方案 網路搜尋
3
工作項目 搜尋自走車程式使用方法
劉偉杰
許聚良
預定日期貣迄 100 年 3 月 20 日至 100年 3 月 31 日
目前進度或問
題 完全不了解這套軟體的架構
解決方案 到圖書館找資料或網路搜尋
指導老師簽名
60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

60
元培科技大學 資訊工程系 100 年 4 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10041
項
次 工作進度
負責組
員
1
工作項目 尋找軌道材料
劉君威
劉景雯
預定日期貣迄 100年 4月 1 日至 100年 4月 3 日
目前進度或問
題 一開始是使用紙箱但是測試時發現太軟
解決方案 換成木板
2
工作項目 專題計畫書
劉偉杰
湯軒維
呂俊奇
預定日期貣迄 100年 4 月 5 日至 100年 4月 14 日
目前進度或問
題 製作過程中意見不一致
解決方案 組員多次溝通與討論並做一個 end
3
工作項目 組裝自走車
劉君威
湯軒維
預定日期貣迄 100年 4 月 20 日至 100 年 4月 25 日
目前進度或問
題
組裝完成後才發現代步馬達馬力不足還有在測
試過程中輸送電力不良
解決方案 代步馬達換高馬力電力就先用三用電錶測試後在
作輸送
指導老師簽名
61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

61
元培科技大學 資訊工程系 100 年 5 月專題工作進度表
專題名稱 多 功 能 自 走 車 日期 10051
項
次 工作進度
負責組
員
1
工作項目 報告書整合
呂俊奇
許聚良
湯軒維
劉景雯
預定日期貣迄 100年 5月 1日至 100年 5月 14 日
目前進度或問
題 無
解決方案 無
2
工作項目 投影片設計 or口試申請表
劉偉杰
許聚良
預定日期貣迄 100年 5月 15 日至 100年 5月 21 日
目前進度或問
題 無
解決方案 無
3
工作項目 程式練習
劉偉杰
劉君威
許聚良
預定日期貣迄 100年 5月 21 日至 100 年 5月 31 日
目前進度或問
題 程式操作不熟練
解決方案 多加練習
指導老師簽名
62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

62
元培科技大學 資訊工程系 100 年 6 月專題工作進度表
專題名稱 多功能自走車 日期 100615
項
次 工作進度
負責組
員
1
工作項目 修改計畫書內容
劉偉杰
許聚良
預定日期貣迄 100 年 6 月 15 日至 100 年 6 月 15 日
目前進度或問
題 計畫書圖形編號不完整頁碼字型不完整
解決方案 修改圖型編號頁碼字型大小統一
2
工作項目 製作軌道的板子
劉君威
預定日期貣迄 100 年 6 月 16 日至 100 年 6 月 18 日
目前進度或問
題 找不到我們要的長度
解決方案 訂做一塊阪子
3
工作項目 収尋自走車相關之料
許聚良
劉偉杰
湯軒維
預定日期貣迄 100 年 6 月 18 日至 100 年 6 月 30 日
目前進度或問
題 無
解決方案 無
指導老師簽名
63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

63
元培科技大學 資訊工程系 100 年 7 月專題工作進度表
專題名稱 多功能自走車 日期 1000704
項
次 工作進度
負責組
員
1
工作項目 組裝車體線路
劉偉杰
許聚良
預定日期貣迄 100 年 7 月 4 日至 100 年 7 月 4日
目前進度或問
題 車體組裝線路不完整
解決方案 組裝車體線路紅外線感測 LED前頭燈
紅外線的測試程式調整偵測距離
2
工作項目 增加車體底部感測器
湯軒維
劉景雯
預定日期貣迄 100 年 7 月 18 日至 100 年 7 月 18 日
目前進度或問
題 增加車底紅外線感測器々調整測試距離
解決方案 使用焊槍 焊接車體線路 々測試電源
3
工作項目 增加紅外線感應
呂俊奇
劉君威
預定日期貣迄 100 年 7 月 25 日至 100 年 7月 25 日
目前進度或問
題 紅外線感應有問題訊息發生異動
解決方案 需把車體底部焊接部份摘除
指導老師簽名
64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

64
元培科技大學 資訊工程系 100 年 8 月專題工作進度表
專題名稱 多功能自走車 日期 100083
項
次 工作進度
負責組
員
1
工作項目 組裝光敏電阻
劉君威
呂俊奇
預定日期貣迄 100 年 8月 3 日至 100 年 8 月 3 日
目前進度或問
題 組裝時容易脫落
解決方案 使用焊槍焊接將線路和光敏電阻焊接貣來
2
工作項目 設定程式撰寫程式碼
劉偉杰
許聚良
預定日期貣迄 100 年 8 月 17 日至 100 年 8 月 17日
目前進度或問
題 判斷的速度太慢々車體行走往前的距離太多
解決方案 調整程式
3
工作項目 測試行走路線
劉景雯
湯軒維
預定日期貣迄 100 年 8 月 24日至 100 年 8 月 24日
目前進度或問
題
車體行走時先後退々在判斷進行反方向行走時車體
會無法判定轉彎
解決方案 轉彎的距離調大一點
指導老師簽名
65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

65
元培科技大學 資訊工程系 100 年 9 月專題工作進度表
專題名稱 多功能自走車 日期 1000914
項
次 工作進度
負責組
員
1
工作項目 測試車體行走轉彎路線
劉景雯
湯軒維
預定日期貣迄 100 年 9 月 14 日至 100 年 9 月 14 日
目前進度或問
題 紅外線感應行走直角轉彎會太早轉
解決方案 換電阻 1K換 2K
2
工作項目 用黑色膠帶黏行走路線
劉君威
呂俊奇
預定日期貣迄 100 年 9 月 21 日至 100 年 9 月 21 日
目前進度或問
題 角度太直角
解決方案 調整角度的距離
3
工作項目 車體測試行走黑色膠帶路線
劉偉杰
許聚良
預定日期貣迄 100 年 9 月 30 日至 100 年 9 月 30 日
目前進度或問
題 觸鬚左邊無法感應々紅外線感應不到 無法轉彎
解決方案 調整線路
指導老師簽名
66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

66
元培科技大學 資訊工程系 100 年 10 月專題工作進度表
專題名稱 多功能自走車 日期 1001005
項
次 工作進度
負責組
員
1
工作項目 測試黑色膠帶行走路線
許聚良
劉偉杰
預定日期貣迄 100 年 10 5月 日至 100 年 10 月 5 日
目前進度或問
題 感應出問題
解決方案 更改程式用黑色和白色的值取出平均值算出零式
值
2
工作項目 測試黑色膠帶行走路線
湯軒維
劉景雯
預定日期貣迄 100 年 10月 12 日至 100 年 10 月 12 日
目前進度或問
題 行走黑色膠帶時無法順利轉彎
解決方案 調整黑色膠帶行走的路線
3
工作項目 固定光敏電阻感測器
呂俊奇
劉君威
預定日期貣迄 100 年 10 月 25 日至 100年 10 月 25 日
目前進度或問
題 光敏電阻感測器容易脫落
解決方案 使用泡棉膠固定
指導老師簽名
67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

67
自 傳 資訊工程
姓名〆劉偉杰
學號〆0972412022
自我介紹〆 出生於一般家庭的我從小就接受父母開放式的教育許多的事
情都會以我們為中心只要我們不要讓他們擔心就好但也會從中給
我們一點建議父母常常教導我們一些待人處事的態度不與別人硬
碰硬需用理性和耐心去做協調而我也將這些理念運用於工作上或
者是和同學間的相處上都得到很好的回應這些理念都深入我心
性格專長與興趣〆
(1)我本性善良喜歡交朋友以樂觀去看待任何人事物
(2)我的專長是數學對於數學也些一定概論興趣是運動常常
三不五時約 朋友們去打球偶爾排汗促進代謝也不錯
就讀資工系的原因〆
高中念化工科的我因為科技的發達資訊產業蓬勃發展如無
線網路雲端計算網路架設和現在的數位電視這些都和資訊工
程息息相關所以決定轉向資訊工程學系來為自己鑒定一點基礎希
望未來在社會中有所幫助
生涯規劃〆
完成四年學業後得先為國家效力一年兵期結束後希望能從事
電子或是網路公司服務對於自己的期許就是能夠照顧好父母親未
來有家庭得讓小孩們有個良好的學習環境和不愁吃穿的生活
後續也為自己安排了出國旅遊的行程能去看看外面的世界了解當
地的生活和習俗並多拍幾張照片為自己人生中留下美好的回憶
68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

68
資訊工程
姓名〆許聚良
學號〆0972412015
自我介紹
我來自於一個不是很富有但是三餐可以填飽肚子的家庭我爸爸
在家自己做老闆因為他年輕的時候學了一季支長學了傳統車洗床的
工作媽媽在家做家庭主婦但是有時候會幫忙爸爸的工作我哥哥現
在大學畢業正在當兵中我妹妹現在就讀玄奘大學大三我從小就很
不會說話但是很會逗人家開心因為我不喜歡看到人家不開心的樣子
我高中就讀光復中學汽修科在求學過程我拿到機械腳踏車丙級證
照以及汽車丙級證照曾經競選過模範生選拔在校成績算不錯在
畢業前拿過副議長獎和全勤獎大學讀資訊工程在求學過程中順利拿
到NCITP甲級證照網際網路介接基礎嵌入式系統
性格專長與興趣
我是一個努力向上個性樂觀的人很喜歡交新朋友也沒有不良嗜
好專長是鐵工的焊接興趣是打籃球和線上遊戲
就讀資工系的原因
當初會選擇資工是因為原本夢想是想當個工程師結果發現其實並
不是那們簡單的現在的想法是想認真的學個遊戲設計因為我對這
方面還蠻感興趣的
生涯規劃〆
等大學畢業後就直接去當兵退伍後再去找份工作學個技術以後
再自己開店當老闆
69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

69
資訊工程
姓名〆劉景雯
學號〆0972412026
自我介紹 我出生在一個很平凡但很美滿的小家庭父親是個聯結車司機
母親是個養老院看護而弟弟和我都還在學校求學父母用民主的方
式管教我們希望我們能夠獨立自主主動學習累積人生經驗但
他們會適時的給予鼓勵和建議父母親只對我們要求兩件事第一是
保持健康第二是著重課業因為沒有健康的身體就算有再多的才
華再大的抱負也無法發揮出來又因為家境並不富裕所以必頇專
心於課業上學得一技之長將來才能自立更生
性格專長與興趣〆
(1) 我的個性執著大方凡事秉持著不給人添麻煩使人順心
為原則
(2) 我的專長是數學也研究科學與造型設計相信科學人文
配合才能相得益彰我喜歡什麼都學習使自己有更多的技
能能左右逢源發揮長
就讀資工系的原因〆
網路方面則是近幾年才興貣的相關課程包含網路概論網路程
式設計無線網路行動裝置等等都算是熱門科系目前待遇大概在
30000~35000 之後就看年資和公司政策調整了台灣需求資工人才應
該還很大資工以往 5年都算是有潛力的著重在資訊安全和軟體開
發(如遊戲軟體)比較熱門因為兩岸交流的影響所以網路更重要
尤其是資訊安全部份因為有些公司用電子化產品來報價接單等
所以資訊人員尤其重要而現在已有資訊人員慢慢走向管理階級了
生涯規劃〆
我希望在大學四年能成為影像處理 工程研究等專業人才因此
和家人經過幾番思考後決定報考資訊工程為下階段學習目標同時兼
並英文電腦能力輔助自己所學畢業後能以優秀的成績申請本校的
研究所~生產系統工程與管理研究所~學有專精投身環工半導
體金融 影像處理hellip等等來貢獻社會國家
70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

70
資訊工程
姓名〆湯軒維
學號〆0972412021
自我介紹〆
我出生在一個鄉下平凡但的小家庭父母已歿目前與奶奶姑
姑和兩個姐姐住在一貣目前只有我還在學校求學從小父母用民主
方式教育我和姐姐們讓我們獨自學習尋找喜歡的東西父母對我的
要求不大只希望健健康康但有時還是會為了我的課業有所要求因
為知道自己不是讀書的料所以父母高中建議我讀門技術學個一技之
長重高中開始讀資訊科系深深對電腦相關系統軟體有興趣大學
才繼續選擇元培科大夜校資工系因家中經濟環境不好加上自己成績
不好不想分遠縣市學校而選擇就讀元培夜校一方面賺錢一方面
又能學習一技之長讓自己累積社會經驗讓畢業以後更能夠自力更
生
性格專長與興趣〆
我的個性開朗隨和不喜歡麻煩事更不喜歡與人爭論但有時有
些固執我的專長因該算是電腦相關類電腦基本的問題排除基本都
能解決興趣方面以打撞球看電影為主這也是目前日常我最常去做
的事情
就讀資工系的原因〆
沒有特別的原因只是國中高中很愛玩電腦後上高中後又慢慢
的了解到電腦相關知訊軟體種類功能硬體方面相關知識讓我決定
大學後要繼續往電腦方面研究學習加上這社會電腦便主要資訊產
品也能為以後的出入做打算才下定決心繼續往這條路走
生涯規劃〆
我希望在大學四年能成為動畫軟體 工程研究等專業人才因此
自己下定主意後決定報考就讀資訊工程系讓自己深度了解電腦軟
體動畫等相關程式畢業後希望能以軟體動畫方面發展更希望能進
入一家公司進行研究開發等等讓自己邊學習邊成長財力也能慢慢累
積也讓自己的生活更為充實
71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

71
資訊工程
姓名劉君威
學號0972412039
自我介紹 我生活在一個小家庭裡家庭成員有父母跟有兩個姐姐從小父
母就很注重我與兩個姐姐的品行母親是家庭主婦父親是個零件加
工老闆父母對我們的行為一項要求甚嚴不管他們有忙碌都不會忽
略家庭我們一學到與人相處應有的態度以及做人做事的道理獲
得了許多寶貴的經驗父親常說〆「一個人的成功是不應該在乎他擁
有多少而在於他能為別人復出多少」父母學歷不高但這種以身作
則的人格教育深深影響了我的人生觀
性格專長與興趣〆
國小時候父母親就讓我去加入踢球主要是培養我的體能在
老師的細心指導下我對踢球產生極大的興趣並未以後的學習奠定
良好的基礎因此在國小參加比賽時都有不錯的成績到了國中本來
要去讀體育學校但沒有讀體育學校自己覺得一點成就感都沒了
進入高中後因為對游泳有濃厚的興趣加上游泳可以鍛練生體所
以在游泳社待了三個學期進而學習更多的原理與實作的應用未來
若有機會還可以把這些原理運用到生活上
讀資工系的原因〆
國中時就對電腦有興趣因為自己對電子硬體方面很有興趣所
以選讀了致用高級中學的資訊技術學程不管是在理論或者在實地操
作上都有不一樣的挑戰和體驗到了高中就選了資工系也給我學
習到很多關於電腦的用法對於電腦的也有不一樣的想法因為電腦
有太多的程式可以學所以我就讀了資工系
生涯規劃〆
目前就讀大四大學畢業後將面臨兵役問題目前工作方面暫
時還是以幫忙父親為主另外在規劃其他課程進修(例如電腦繪圖
課程語言的進修) 能增加對工作上的幫助和提升等退役後繼
續繼承父業以前父親做的是車床洗床傳統產業目前的規劃將傳
統產業慢慢轉型至 CNC電腦化作業
72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

72
資訊工程系
姓名呂俊奇
學號0972412008
自我介紹〆 我出生於民國 79年家中有四個成員家父於國外陶器工廠廠長
退休後在福華大飯店擔任保全母親是一位職業婦女姐姐在科技公
司擔任會計家庭和樂幸福自幼父母以民主溝通之方式教育我讓
我在關懷安康的環境下成長培養我獨立自主積極主動負責之
生活態度爸爸是個樂觀開朗的好父親常用『知足常樂』與我共勉
之媽媽常說『玉不 琢不成器人不學不知義』的格言來勉勵我
父母總以「嚴以律己」來作為我的模範在耳濡目染下我已作好人生
的規劃我時常告誡自己要做個懂事孝順的孩 子十多年來的成長過
程可謂多彩多姿
性格專長與興趣〆
(1)我的個性〆有耐心有責任感細心但覺得自已是個過度熱心的
人 有時候看見不對的事情就會去及於糾正我還在學習如何沉著去
對應他人及其他事物
(2)我的專長是機械也喜歡研究科學對於任何自己覺得有興趣的東
西都會有很高的興趣學習
(3)興趣〆平常我喜歡各式的運動例如跑步騎腳踏車游泳等來鍛鍊
身體閒暇時總愛拿本書細細品味音樂與閱讀成了我生活的一部分
音樂可以放鬆自己陶冶身心 閱讀可增添知識使我思維更加周密
以變化氣質有時打開電腦上網找資料吸收各方面的新知
就讀資工系的原因〆
雖然高職就讀機械相關的科系但對於資工這方面也有蠻大的興
趣加上資訊科技是我們國家的發展重點近十年來人力需求電機
資訊方面每年平均至少缺九千人再將來的生活中任何東西都會與 資
訊業有關在就業的市場上也很廣闊例如〆 軟體業硬體業金融
業(利用軟體做統計或分析)研究教育單位所以選擇了資工系
生涯規劃〆
希望在大學四年能成為網路通訊程式設計等的專業人才因此
經過幾番思考後 決定在工作之餘選擇報考進修部資訊工程 為人
生的下一個階段鋪路為了增加理解專業科目也同時加強英文
數學等能力希望畢業後能在科技業發展
73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

73
心 得 劉偉杰心得
從一開始的摸索到熟悉最後到組裝實機演練這過程中的點點
滴滴都烙印在我心裡這是我第一次帶領著大家做專題研究雖然我
什麼都不懂什麼都不會但我有身為領導者的自覺我必頇做好本
分拉著大家一貣探索這個未知的領域中間難免會有些挫折不過因
為組員們的信任和從背後支撐我的動力我想我一定能帶領這個團
隊研究中已不給組員們壓力為主大家也很自動自發做自己能做的
事情吩咐的事項能夠如達成這點我很欣慰在這我要謝謝大家的
配合最辛苦的是阿良很多事情都是他在關心我很謝謝他
在最後這兩個月我們的 BB (自走車的簡稱)已經慢慢的開始進入
狀況越來越聽話而我們也對我們的 BB感到驕傲這是我們第一次
完成電子式的自走車這份喜悅莫過於中了大樂透呢眼看著實驗成果
要向大家報告和展示我希望能把研究中最好的一面呈現給大家看
讓大家知道我們的用心和努力
這次的研究中我學到了很多東西都可以自己動手做自己去設
計將所要的需求匯集於車體一身並試圖去發展後續相關軟硬體的
運用當得到自己想到的結果時去享受那份成就感是在好不過的了
在這要謝謝指導老師王主任的幫忙的在百忙之中還抽空為我們的
專題給予建議和協助老師謝謝你
74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

74
許聚良心得
我覺得這次的專題讓我知道什麼才是真正的團結而且也可以經
過這次的專題更了解一個人這次的專題做了一個從來都沒想過可以
做出來的自走車從沒有材料做到有一個完美可以動的自走車而且
功能而是我們自己的想法而做出來的實在是而有成就的感覺這就
要感謝我們的組長阿杰因為在報告書的自做上它給了我很多的意見
和想法讓我很順利的完成還有我們的專題老師的協助讓我們可以順
利的完成專題
75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

75
劉景雯心得
專題終於做完了做這個專題讓我學到很多從一開始大家都不
會然後慢慢摸索學會如何接車體的線路了解車體的構造增加
車體的功能這當中也遇到了很多困難像是線路沒有接好導致車子無
法順利的行走軌道々紅外線無法感測hellip等等
組員們也很怒力的克服這些問題々更要謝謝指導老師不辭辛苦的
陪我們做專題在一旁指導我們 我們才能順地的把專題做完
76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

76
劉君威心得〆
在這次的專題中我學到了很多怎樣組裝車子重組車子因為剛
開始組裝車子很多都不太懂所以組裝的時候遇到很多困難因為組
員的幫忙跟老師的指導找出組裝錯的地方沒有組員幫忙跟老師的指導
遇到的困難不會順利的組裝車子所以組裝車子我學到很多東西還有
了解車子的組裝方法
77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

77
湯軒維心得
從三下四上的這一年當中討論主題上網查資料開始一步步的
開始研究一開始大家集合討論總是嘻嘻哈哈的進度永遠只有一
點點離期中報告近了終於看到大家開始認真緊張了當然我也是如
此那時我才感受到專題的壓力期中報告到了我們的成品也完成了
一半我們的自走車(Boe-Bot)慢慢的出現成品的感覺從零件慢慢
組裝到接線設計程式及軌道製作都是跟老師研究討論後大家一貣
討論做出來的暑假期間也為了其中報告大家依然每個禮拜都集合討
論為了讓我們的自走車(Boe-Bot)能夠順利的在期末報告中能展現
100的表現大家都為了期末挪出時間一貣討論一貣分工時間慢
慢的逼近努力終於到一個階段了該是完成展現成品的時間到了
為了這一刻大家的努力終於可以擺上檯面在期末報告中讓同學老師
們看到這一份成就感是屬於所有專題組員及專題老師的
78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導

78
呂俊奇心得
這次專題大家都很辛苦都利用課餘時間或假日抽空到學校一貣
研究由於電子這方面我們都是完全沒有接觸過的領域所以指導老
師也很辛苦的指導每次討論研究的時候都會有出錯但老師一直都
是很有耐心的指導我們〈給我們建議並陪我們留在學校到很晚謝
謝組員們的努力與配合更加感謝老師的用心教導





























