Embed Size (px)
Citation preview
Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
ALGORITMO BIOINSPIRADO EN COLONIAS DE HORMIGAS PARA LA OPTIMIZACION DE LA SEMAFORIZACION
BIOINSPIRED ALGORITHM FOR ANT COLONY OPTIMIZATION IN THE TRAFFIC LIGHT
Santos M Zambrano S. Oscar J Abella G.**Frank N Giraldo R***. Nelson Becerra.
Resumen: Los semáforos son unos dispositivos indispensables en el control del transito en
cualquier ciudad, puesto que permiten regular el flujo de vehículos en las diferentes
intercesiones y así proporcionar seguridad a los peatones y usuarios que se movilizan en la
ciudad, pero su eficacia se ve comprometida cuando los tiempos de manejo del semáforo no
responden de una forma eficiente al flujo de vehículos ocasionando así largas filas de
vehículos, para evitar esta congestión en la actualidad se están empleando los semáforos
inteligentes basados en algoritmos sofisticados que mejoran los tiempos de respuesta en los
cambios de luces de los semáforos, este proyecto esta basado en el algoritmo de colonia de
hormigas que por su naturaleza probabilística permite optimizar los tiempos de respuesta, lo
cual se ve reflejado en la reducción del tiempo en que los vehículos salen de una intercesión
y en el aumento del flujo de la misma.
Palabras clave: Algoritmo bioinspirado, colonia de hormigas, optimización, flujo, tiempos,
probabilidad.
Abstract: Semaphores are a few essential devices in controlling traffic in any city, since that
can regulate the flow of vehicles in different intercessions and thus provide safety to
Tecnologo en sistematización de datos. Universidad Distrital Francisco José de Caldas. [email protected] Tecnólogo en electrónica. Universidad Distrital Francisco José de Caldas. [email protected] Ingeniero de control. Universidad Distrital Francisco José de Caldas. [email protected]
Ingeniero de sistema. Universidad Distrital Francisco José de Caldas. [email protected]

pedestrians and users who move into the city, but its effectiveness is compromised when time
management of traffic lights do not respond efficiently to the flow of vehicles and causing long
queues of vehicles, to avoid this congestion are currently using smart traffic lights based on
sophisticated algorithms that improve response times changes traffic lights, this project is
based on the ant colony algorithm by its probabilistic nature optimizes response times, which
is reflected in the reduction of the time the vehicles leave intercession and increased flow
thereof.
Key Words: Bio-inspired algorithm, ant colony optimization, flow, time, probability.
1 Introducción
En la actualidad el aumento de carros particulares y las motos ha ocasionado que el sistema
de transito colapse, puesto que las calles no fueron diseñadas en un principio para soportar
flujo vehicular constante y rápido, además los tiempos de respuesta de los semáforos no son
eficientes puesto que el cambio de luz a verde puede darse en intercesiones en la cuales no
se encuentren vehículos o simplemente realizan el cambio de luz bastante rápido y esto
interrumpe el flujo vehicular.
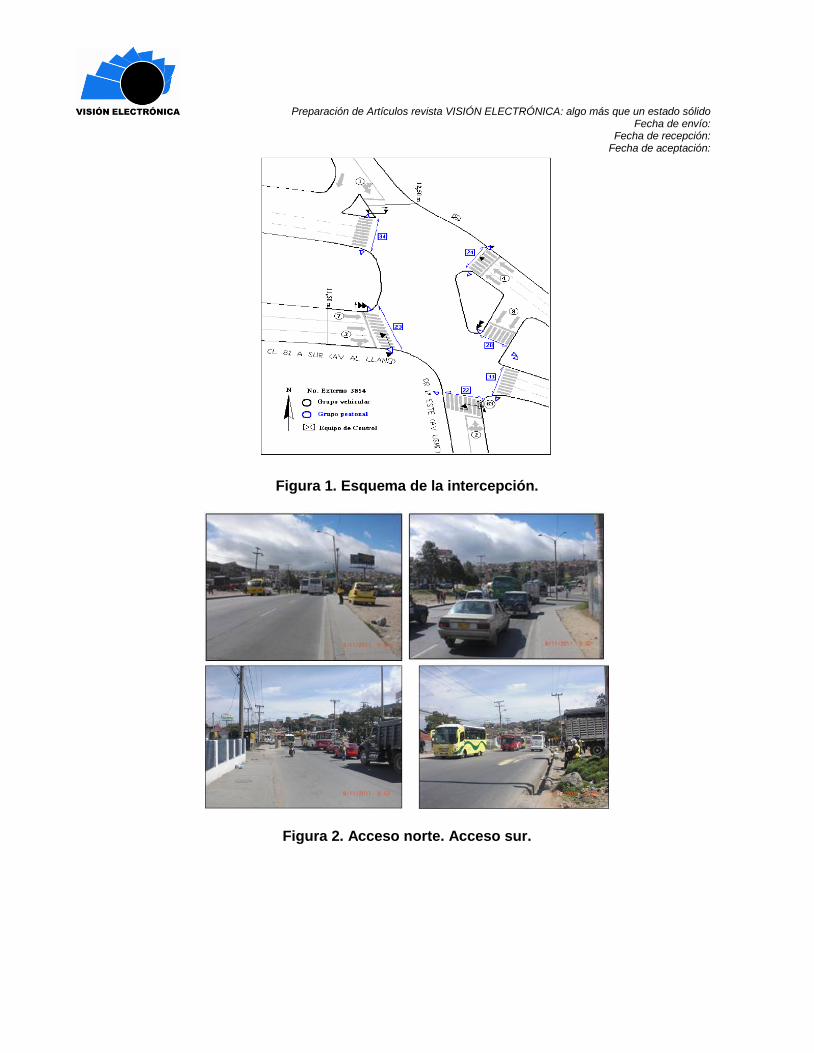
Con el presente trabajo se simulo la intercesión numero 23 de la ciudad de Bogotá, a la cual
se le aplico dos tipos de algoritmo, SIGCAP que es el empleado actualmente para el manejo
de los semáforos y el de colonia de hormigas que es el propuesto para el mejoramiento en
los tiempos de respuesta o cambios de luces, con esta investigación se demostró que el
algoritmo propuesto es mas eficiente ya que se evidencio un aumento en el nivel del flujo
vehicular y una disminución en los tiempos en el cual salen los vehículos de la intercesión.
Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
Figura 1. Esquema de la intercepción.
Figura 2. Acceso norte. Acceso sur.

Figura 3. Acceso occidente. Acceso oriente.
2 Terminología del tráfico
En la terminología empleada en la dinámica de tráfico una intersección es considerada como
un conjunto de movimientos permitidos en un cruce, para regular o permitir el flujo en cada
cruce es necesario el uso de semáforos que indiquen si un vehículo puede atravesar el área
o si por el contrario tiene que esperar para transitar esa área, cada semáforo consta de una
fase la cual es el tiempo que permaneció en verde, antes que el semáforo este en el estado
de verde se encuentra en el estado de amarillo el cual indica a los vehículos que se
encuentren en el estado de rojo que se preparen para iniciar la marcha y los que se
encuentran en estado de verde que se dispongan a detener la marcha.
Un ciclo es cuando se le ha dado el paso a todos los semáforos contando el tiempo total, la
partición de verde es el porcentaje para el cual el semáforo estuvo en el estado de verde y se
tomo con respecto al ciclo. La mínima distancia que hay entre vehículos se denomina
intervalo mínimo y se mide en segundos, el tiempo que tarda el próximo vehículo en llegar a
la intersección se denomina tiempo de llegada, y el tiempo que tardo cada vehículo en salir
de la intersección es la resta del tiempo de llegada con el tiempo de salida.

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
2.1 Flujo del tráfico
Cuando la luz esta en verde los vehículos comienzan a salir, el primero que está en la fila
sale sin ningún retardo y luego el siguiente sale hw segundos después así sucede hasta el
último en la cola, si en ese intervalo llegan nuevos vehículos y la cola no está vacía entonces
tiene que esperar hw segundos multiplicado por el número que ocupe en la fila, si la cola
está vacía no tiene que esperar nada y continua. Cuando hay cambio de fase se pasa de la
luz verde a la amarilla terminando en la roja por un lado y por otro se pasa de la luz roja a
amarilla para quedar luego en verde, cuando la luz es amarilla y roja pueden llegar vehículos
entonces la suma de estos dos tiempos es un intervalo para el cual llegan vehículos pero no
salen.
2.2 Tiempo en la intersección
El algoritmo colonia de hormigas al inicio de cada fase evalúa los tiempos, de acuerdo al
tiempo se obtiene el intervalo de tiempo para salir de la intersección; este proceso tiene dos
partes una que es conocida debido a que es el tiempo necesario para vaciar la intercepción
y el otro que es desconocido ya que es el número de vehículos que pueden llegar, este dato
es necesario porque solo sabiendo el número de posibles nuevos vehículos es como se
optimiza el algoritmo, para esto se asume un dato el cual es la tasa con la que llegan nuevos
vehículos por calzada.
3. Algoritmo colonia de Hormigas
3.1 Inspiración del algoritmo
El algoritmo está inspirado en el comportamiento de las hormigas, esto se representa con el
experimento del doble puente (ver figura 6), en donde su primera versión pusieron dos

puentes de igual tamaño, al comenzar las hormigas se aventuran por un camino, al
transcurrir el tiempo uno de los caminos acumula más feromona y este es el que siguen
escogiendo.
Figura 4. Doble puente de igual longitud.
En la figura 7, se muestra la segunda versión del experimento, en este el puente inferior es
el doble de grande al superior, y al hacer el mismo proceso observaron que las hormigas
después de un tiempo escogían el camino más corto debido a la acumulación de feromona.
Figura 5. Doble puente con diferente longitud.
3.2 Framework para el algoritmo de colonia de hormigas
Al aplicar el comportamiento de las hormigas para el desarrollo de problemas
computacionales se crean hormigas artificiales que con la ayuda de la feromona recorren un
grafo, en términos matemáticos su representación es la siguiente: (S, f, Ω), donde S es el
conjunto de posibles soluciones, f es la función objetivo y Ω son las reglas para el problema,
el objetivo es encontrar la solución más óptima que minimice f. Aunque hay varias versiones
Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
para el algoritmo todas siguen los mismos pasos lo único en que se diferencian es la manera
en que se actualiza la feromona, los pasos son los siguientes:
1. Se inicializan las rutas: Para recorrer el grafo, con la misma cantidad de feromona.
2. Se construyen las soluciones: Cada hormiga construye una solución guiándose por los
niveles de feromona, la solución es un conjunto de nodos por los cuales pasa la
hormiga, una hormiga va de un punto i a un punto j.
3. Actualizar feromona: Primero la feromona se evapora.
4. Pasó 2 y 3 se repiten hasta que se llegue a la condición conocida [10].
3.3 Algoritmo SIGCAP
SIGCAP: ”A computer program for assessing the traffic capacity of signal-controlled road
junctions", este algoritmo es del tipo offline en el cual el tiempo de fase y ciclo se obtiene sin
tener en cuenta semáforos de otras intersecciones y la duración de fase y ciclo se establece
por periodos prolongados, donde se asume que las variables del tráfico son constantes, este
tipo de funcionamiento es el más barato de implementar pero es uno de los más ineficientes
debido a que el tráfico en una intersección tan importante como la AV al llano varia
frecuentemente.
3.4 Tecnologías
Para la simulación de la intersección se uso el simulador SUMO “Simulation Urban Movility”
debido a que es un software libre y tiene las potentes cualidades como VISIM “Verkehr In
Städten - SIMulation”, el cual es licenciado, además de ser libre tiene la ventaja de permitir
desarrollar scripts en Python para el control de los semáforos, Python es un poderoso y fácil

lenguaje para el uso de estructuras de datos complejas como lo son los grafos, a
continuación se dan unas breves características.
3.4.1 Sumo
Sumo es un simulador de trafico microscópico que ofrece varias herramientas para el estudio
de las variables que interactúan en el tráfico, las principales razones por las cuales se eligió
para el desarrollo de este proyecto fue porque ofrece detectores que permiten conocer el
estado actual del tráfico y por qué ofrece una interfaz llamada traci que le permite interactuar
con programas hechos en Python para el control semafórico. El tipo de detectores que se
uso fue induction loops (bucles de inducción) y estos se programan para que envíen
información de la velocidad, tiempo que han permanecido los vehículos, flujo en un tiempo
que se establezca este tiempo se conoce como frecuencia.
3.4.2 Python
Python es un lenguaje fácil de aprender y en comparación con otros lenguajes el código para
hacer ciertas tareas se reduce en un 30%, además con las librerías Numpy y matplotlib,
python queda igual de potente que matlab para operaciones con vectores y representación
en graficas de la información.
4 MODELADO DEL SIMULADOR
4.1 Flujo Principal
El flujo principal del programa inicia con los datos iniciales que serán dados por el usuario, si
estos no se dan se generaran por defecto; los datos iniciales son la hora, la demanda de
cada calzada, el número de hormigas a utilizar y el número de iteraciones por elección de
tiempo en cada fase. Teniendo la demanda por calzada se prosigue a suscitar el flujo
vehicular el cual se almacena en un archivo; este archivo tendrá el número de vehículos a
simular con la ruta a realizar en la simulación; la creación del archivo es necesaria ya que
sin este el simulador sumo no funciona. Luego el usuario escoge el tipo de algoritmo con el

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
cual se va hacer la simulación para así conectarse con SUMO y darle el tipo de control a
ejecutar, la simulación se realizara hasta que se acabe el intervalo de tiempo o hasta que ya
no hallan más vehículos para simular, en el transcurso de la simulación se van almacenando
datos en unos archivos que serán utilizados después para llenar las tablas y hacer la
comparación entre los algoritmos. Cuando acaba la simulación los datos se representan en
tabla por cada acceso y en intervalos de cada 15 minutos, y se generan los totales también
en tablas.
Si la simulación se hizo ya con los dos tipos de algoritmos se le puede solicitar al programa
hacer las comparaciones las cuales son flujo de vehículos por acceso y tiempo que
permaneció cada vehículo que se haya simulado en los dos algoritmos para salir de la
intersección. Las comparaciones se representan a través de gráficas de dispersión e
histogramas. Si solo se ha simulado con un algoritmo solo se muestra en grafica el flujo de
vehículos por intervalo de tiempo de cada acceso, el diagrama de flujo se representa en la
figura 6.
Figura 6. Diagrama de flujo del programa.

Para realizar la simulación se usan dos archivos el primero en el que se detalla la estructura
de la intersección y el segundo el flujo vehicular la figura 7 muestra el diagrama.
Figura 7. Diagrama de flujo simulacion SUMO.
4.2 Control
El sistema de control semafórico se hace utilizando la interfaz de TRACI la cual permite
comunicar a SUMO con un programa que se realice en python para el control semafórico, en
este caso el programa puede solicitar información como flujo de vehículos, y así utilizando un
algoritmo que se haya escrito determinar el tiempo en cada fase. La figura 8 muestra el
diagrama para el control semafórico usando (TLS).
Figura 8. Diagrama de flujo SIGCAP.
Al comenzar una fase se obtienen el número de vehículos detectados por cada acceso en
cada calzada luego de esto se escoge la calzada que tenga el mayor número de vehículos
detectado, en el caso del acceso 3 y 4 se escoge entre ellos el mayor número de vehículos
que se detectó, lo mismo se hace para el acceso 7 y 8, esto se hace para obtener el tiempo
para vaciar la fila, el cual se va a signar como tiempo mínimo, y este valor se multiplica por el

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
flujo que hubo en ese intervalo y luego se divide por el headway obteniendo el posible
número de vehículos que llegaran en ese tiempo se calcula el tiempo necesario para vaciar
la calzada de vehículos y se asigna como tiempo máximo, el tiempo máximo y mínimo se
restan para obtener el número de nodos que va a tener el grafo en ese nivel, y así se hace
para cada acceso, si no se detectaron vehículos para las calzadas que hacen parte de la
fase entonces no se incluyen en el grafo, cuando se va a escoger el tiempo para una fase se
analiza el tiempo de ciclo luego que se obtiene el tiempo y este pasa se repite el proceso la
figura 9 muestra el proceso iterativo.
t1 t2 t3 t4
A1 G R R R
A3 R G R R
A4 R G R R
A7 R R G R
A8 R R G R
A2 R R R G
t1 t2 t3 t4
A3 G R R R
A4 G R R R
A7 R G R R
A8 R G R R
A2 R R G R
A1 R R R G
t1 t2 t3 t4
A4 R R R G
A7 G R R R
A8 G R R R
A2 R G R R
A1 R R G R
A3 R R R G
Figura 9. Asignacion tiempo de fase.
Donde t1 es el tiempo de la fase para el correspondiente semáforo, la columna representa en
qué fase que accesos están en verde y cuales en rojo siendo los tn los intervalos de
duración.
Como ejemplo de ilustración de cómo queda el grafo cuando se obtienen los datos arriba
mencionados, se supondrá que la fase se encuentra en el acceso 1, y que los tiempos que

son la resta entre el tiempo máximo y mínimo son los siguientes: a1=3 a3,a4=2 a7,a8=2
a2=1.
Figura 10. Ejemplo creacion de grafo.
Después de que las hormigas construyen la solución se le da un costo esto se repite hasta
que todas las hormigas tengan su solución con su respectivo costo, luego de que todas ya lo
han hecho se procede a actualizar, y se vuelve hacer lo ya expuesto hasta que se llegue al
número de iteraciones establecido
Figura 11. Simulacion con algoritmo colonia de hormigas.
4.3 Alcance del proyecto
El tiempo máximo de simulación es un día y el mínimo es de 15 minutos, se modelan solo un
tipo de autos y motos, y dos de buses y camiones, al momento de correr la simulación en
SIGCAP se puede correr con un delay de 0 milisegundos pero al momento de correrlo con el
algoritmo colonia de hormigas la velocidad de ejecución tiene que ser mayor a 150
milisegundos para así apreciar la efectividad del algoritmo propuesto esta asignasion de
Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
delay varía dependiendo de las características de la maquina en donde se ejecute el
programa. Los únicos tipos de comparación que se van a desarrollar son el flujo de vehículos
por acceso por un único tipo de vehículo en un intervalo de 15 minutos y el tiempo que tardo
cada vehículo en salir de la intersección, para hacer esta comparación es necesario que el
vehículo haya sido simulado en los dos algoritmos.
6 RESULTADOS
Como el proyecto se basa en la implementación de un algoritmo bio-inspirado en colonias de
hormigas y este se deriva de la inteligencia artificial se realizaron una serie de pruebas en
diferentes tipos de computadora las cuales posen distintas característica, con esto se buscó
poder demostrar la eficacia del algoritmo.
La simulación demostró que el algoritmo colonia de hormigas es más eficiente que SIGCAP,
para llegar a esta conclusión se hizo la simulación con diferentes datos obteniendo en todos
los casos donde se aplicó un delay apropiado un mayor flujo en cada acceso y un menor
tiempo de permanencia en la intersección, en el presente artículo solo se muestran dos de
las pruebas para no hacerlo muy extenso pero el lector puede corroborarlo cuando haga sus
propias simulaciones. En las dos pruebas mostradas se tomó un intervalo de 30 minutos, se
hizo así para no generar tablas tan largas pero el máximo intervalo con el que se puede
hacer la simulación es de 24 horas. Se dejaron los valores por defecto con los cuales se
programó el algoritmo colonia de hormiga.
Según el procesador la velocidad de la simulación es más rápida, esto claro solo es evidente
en la implementación del algoritmo colonia de hormiga ya que por el costo computacional
que se requiere para el recorrido del grafo y la obtención de la solución más óptima se debe
asignar un número determinado de Delay, el rango del delay se encuentra entre 150ms a
500ms en donde los resultado obtenidos son favorables para el algoritmo colonia de
hormigas.
Los resultados obtenidos fueron de la siguiente forma:
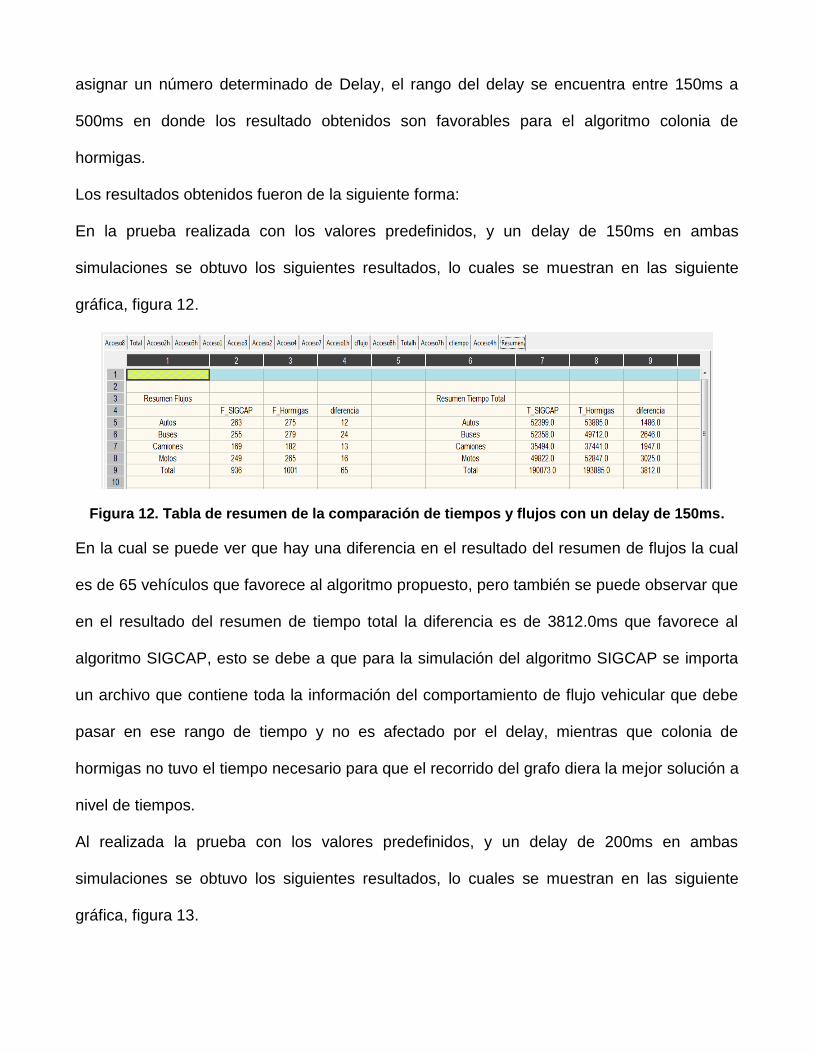
En la prueba realizada con los valores predefinidos, y un delay de 150ms en ambas
simulaciones se obtuvo los siguientes resultados, lo cuales se muestran en las siguiente
gráfica, figura 12.
Figura 12. Tabla de resumen de la comparación de tiempos y flujos con un delay de 150ms.
En la cual se puede ver que hay una diferencia en el resultado del resumen de flujos la cual
es de 65 vehículos que favorece al algoritmo propuesto, pero también se puede observar que
en el resultado del resumen de tiempo total la diferencia es de 3812.0ms que favorece al
algoritmo SIGCAP, esto se debe a que para la simulación del algoritmo SIGCAP se importa
un archivo que contiene toda la información del comportamiento de flujo vehicular que debe
pasar en ese rango de tiempo y no es afectado por el delay, mientras que colonia de
hormigas no tuvo el tiempo necesario para que el recorrido del grafo diera la mejor solución a
nivel de tiempos.
Al realizada la prueba con los valores predefinidos, y un delay de 200ms en ambas
simulaciones se obtuvo los siguientes resultados, lo cuales se muestran en las siguiente
gráfica, figura 13.

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
Figura 13. Tabla de resumen de la comparación de tiempos y flujos con un delay de 200ms.
Se puede ver que los resultados obtenidos favorecen al algoritmo colonia de hormigas ya
que la diferencia de resumen de flujo es de 112 y de tiempo total es de 18602.0ms esto se
debe a que con esta asignación se le da un rango mayor de tiempo para que el programa
pueda recorrer el grafo y así encuentre una solución más óptima.
El análisis de las gráficas se hace tomando una clase de vehículo (autos, buses, camiones o
motos), para así poder obtener una muestra confiable de la cantidad total que podría estar
circulando en ese intervalo de tiempo.
Retomando el caso anterior en donde se realiza la simulación con un delay de 150ms
obtenemos las siguientes gráficas al tomar como base de datos las tablas generadas por el
programa en el acceso3 y acceso3h, seleccionando los datos obtenidos en el ítem de autos
que circulan de frente, cuyas tablas se muestran a continuación.
Figura 14. Tablas de datos de los acceso3 y acceso3h con un delay de 150ms.

Figura 15. Grafica de comparación acceso3h y acceso3 para autos con un delay de 150ms.
La gráfica de la figura 15, de dispersión muestra el nivel de flujo vehicular que obtiene el
algoritmo colonia de hormigas al ser comparado con el de SIGCAP en el mismo acceso de la
intersección, ya que en promedio circularon 34 autos con la implementación de SIGCAP
mientras que con colonia de hormiga el promedio fue de 31, estos datos se toma evaluando
solo un sentido de la intersección no quiere decir que sea el promedio total.
Figura 16. Grafica de dispersion que muestra la comparacion de tiempos para autos con un
delay de 150ms.
La grafica de la figura 16, de dispersión de tiempo para autos muestra que hay una gran
agrupación de vehículos en el rango de 100ms a 300ms para ambos algoritmos pero es
evidente que fuera de este rango hay más puntos relacionados al algoritmo colonia de
hormigas que de SIGCAP lo cual quiere decir que se tardó más tiempo en colonia de
hormigas, por lo tanto no se puede ver una gran mejora a nivel de tiempo pero si a nivel de
flujo vehicular, lo cual se puede asumir como una eficacia del 50% sobre el actual sistema
implementado.
Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
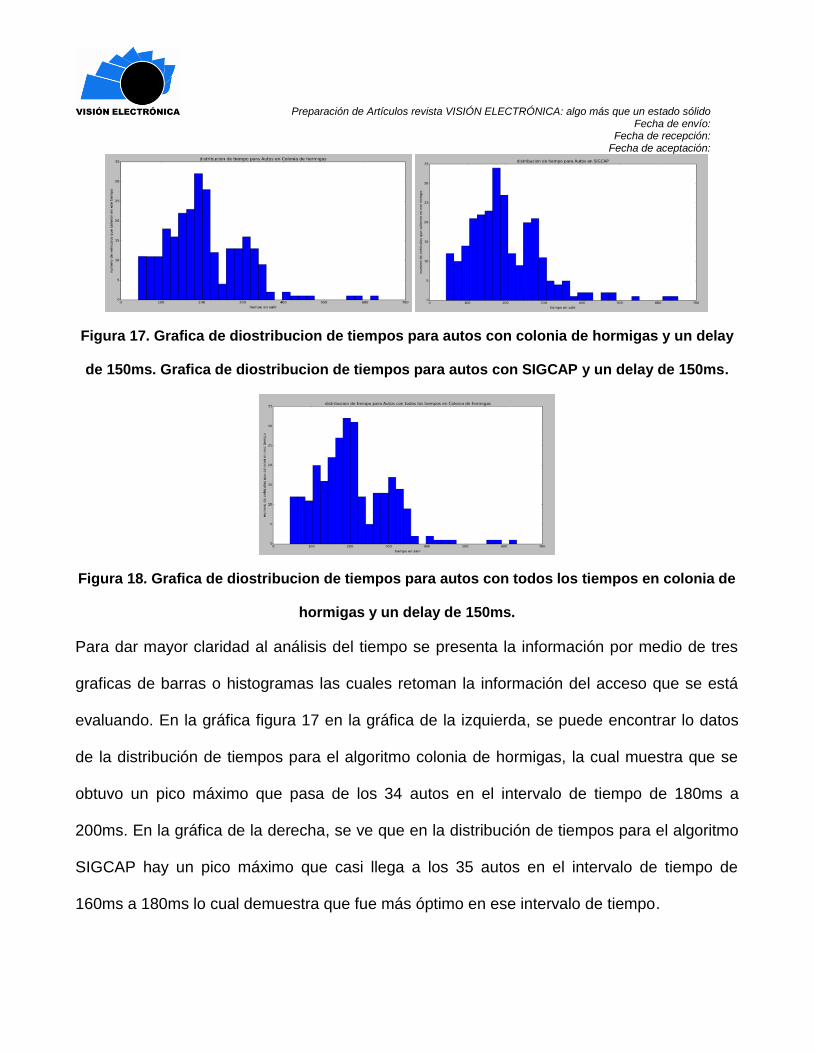
Figura 17. Grafica de diostribucion de tiempos para autos con colonia de hormigas y un delay
de 150ms. Grafica de diostribucion de tiempos para autos con SIGCAP y un delay de 150ms.
Figura 18. Grafica de diostribucion de tiempos para autos con todos los tiempos en colonia de
hormigas y un delay de 150ms.
Para dar mayor claridad al análisis del tiempo se presenta la información por medio de tres
graficas de barras o histogramas las cuales retoman la información del acceso que se está
evaluando. En la gráfica figura 17 en la gráfica de la izquierda, se puede encontrar lo datos
de la distribución de tiempos para el algoritmo colonia de hormigas, la cual muestra que se
obtuvo un pico máximo que pasa de los 34 autos en el intervalo de tiempo de 180ms a
200ms. En la gráfica de la derecha, se ve que en la distribución de tiempos para el algoritmo
SIGCAP hay un pico máximo que casi llega a los 35 autos en el intervalo de tiempo de
160ms a 180ms lo cual demuestra que fue más óptimo en ese intervalo de tiempo.

Pero si analizamos la gráfica de la figura 18, la cual permite observar la distribución de
tiempo para autos con todos los tiempos en colonia de hormigas se puede llegar a la
conclusión que en promedio existe un mayor flujo vehicular ya que se puede observar que la
mayoría de barras están concentradas en el intervalo de 40ms a 300ms con rango que va
desde los 15 autos hasta un aproximado de 33 autos lo cual comprueba que el algoritmo
colonia de hormigas es más eficiente a nivel de flujo vehicular.
Ahora se presenta las gráficas generadas por el programa cuando se le aplica un delay de
200ms, esto con el fin de demostrar la importancia de dar una correcta asignación para que
el programa pueda recorrer el grafo y dar una solución óptima.
Figura 19. Tablas de datos de los acceso3 y acceso3h con un delay de 200ms.
Figura 20. Grafica de comparación acceso3h y acceso3 para autos con un delay de 200ms.
La gráfica de la figura 20, de dispersión muestra el nivel de flujo vehicular que obtiene el
algoritmo colonia de hormigas al ser comparado con el de SIGCAP en el mismo acceso de la
intersección, ya que en promedio circularon 34 autos con la implementación de SIGCAP
mientras que con de colonia de hormiga el promedio fue de 32.

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
Figura 21. Grafica de dispersion que muestra la comparacion de tiempos para autos con un
delay de 150ms.
La grafica de la figura 21, de dispersión de tiempo para autos muestra que hay una gran
agrupación de vehículos en el rango de 50ms a 350ms para ambos algoritmos pero es
evidente que fuera de este rango hay más puntos relacionados al de SIGCAP que al
algoritmo colonia de hormigas lo cual quiere decir que se tardó más tiempo el de SIGCAP,
por lo tanto ya se puede ver una gran mejora a nivel de tiempo y a nivel de flujo vehicular, lo
cual se puede asumir como una eficacia del 95% sobre el actual sistema implementado.
Figura 22. Grafica de diostribucion de tiempos para autos con colonia de hormigas y un delay
de 200ms.Grafica de diostribucion de tiempos para autos con SIGCAP y un delay de 200ms.

Figura 23. Grafica de diostribucion de tiempos para autos con todos los tiempos en colonia de
hormigas y un delay de 200ms.
Como se puede ver en la gráfica figura 22 en la gráfica de la izquierda, se puede encontrar
los datos de la distribución de tiempos para el algoritmo colonia de hormigas, la cual muestra
que se obtuvo un pico máximo que pasa de los 28 autos en el intervalo de tiempo de 120ms
a 140ms. En la gráfica de la derecha, se ve que en la distribución de tiempos para el
algoritmo SIGCAP hay un pico máximo que casi llega a los 35 autos en el intervalo de tiempo
de 160ms a 180ms lo cual demuestra que fue más óptimo en ese intervalo de tiempo. Pero si
analizamos la gráfica de la figura 23, la cual permite observar la distribución de tiempo para
autos con todos los tiempos en colonia de hormigas se puede llegar a la conclusión que en
promedio existe un mayor flujo vehicular ya que se puede observar que la mayoría de barras
están concentradas en el intervalo de 50ms a 220ms con rango que va desde los 15 autos
hasta un aproximado de 28 autos lo cual comprueba que el algoritmo colonia de hormigas es
más eficiente a nivel de flujo vehicular.
7 CONCLUSIONES
1. En el peor caso de ejecución para el algoritmo colonia de hormigas es cuando se
asigna el número de iteraciones a 149, el número de hormigas a 49 y el grafo que se
crea es de 137269 el cual es el máximo, el tiempo necesario para obtener el tiempo de
fase que se le va a signar al semáforo es de 48.375 segundos

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
2. El aspecto más importante que se debe tener en cuenta a la hora de verificar el
algoritmo colonia de hormigas es la correcta asignación de delay, ya que de este
depende la rapidez y la eficacia que tendrá la respuesta del programa frente a la
asignación de tiempos óptimos para los semáforos.
3. La mejor ventaja que muestra el algoritmo de SIGCAP frente al de colonia de
hormigas es que no depende directamente de la asignación de algún delay en
especial para generar los datos, ya que estos están pregrabados en una base de
datos que solo se importa, por lo tanto en casi todos los casos en el primer intervalo
de las tablas tiene un mejor resultado.
4. En condiciones ideales la diferencia en el flujo vehicular es en promedio de 112 a 360
vehículos y de tiempo.
5. Al evaluar el sistema de control semafórico se debe tener en cuenta el siclo de cambio
de luces ya que en condiciones reales también es necesario dar un tiempo optimo
para que los peatones puedan cruzar por la intercepción.
6. Dependiendo del equipo en donde se ejecute el programa se debe tener extremo
cuidado al momento que se asigne los parámetros para la simulación, por ejemplo si
se posee un buen equipo se puede reducir los niveles de flujos iniciales y se obtendría
buenos resultados, pero sí en cambio se cuenta con un equipo con un bajo poder de
procesador se debe aumentar el nivel de flujo para obtener buenos resultados.

8 REFERENCIAS
[1] Consorcio Monitoreo Tránsito y Transporte Urbano Bogotá (2012), Toma de información
de campo para el programa de monitoreo, seguimiento y planeación del tránsito y el
transporte de Bogotá D.C.
[2] Fernando, L., César, P., Hernández, A., & Alfonso, D. (2012). Control de tráfico vehicular
usando ANFIS Vehicular traffic control using ANFIS, Paginas 79–88.
[3] Oliveira, D. De, & Bazzan, A. (2006). Traffic lights control with adaptive group formation
based on swarm intelligence, Retrieved from
http://link.springer.com/chapter/10.1007/11839088_61
[4] Flores, J. F., & Troya, R. J. (2012). Semaforización inteligente adquisición de datos e
implementación de control difuso en tiempo real para la optimización del flujo en la ciudad.
Retrieved from http://repositorio.usfq.edu.ec/handle/23000/1419
[5] Gerardo, M. C. C, Sánchez, M., Juan, I, & Cortés, C. (2009). Evaluación de un Sistema
Inteligente de Semaforización Mediante Simulación para la Ciudad de Orizaba, Veracruz, (1),
1–23.
[6] Javier Ferre, José García Nieto, Enrique Alba, F. C. (n.d.) (2010). Validación Inteligente
para la Sincronización de Semáforos Basada en FeatureModel.
[7] Jaramillo Ramírez Daniel. (2005). Simulación Y Control De Tráfico Vehicular por
semaforización, Universidad Pontificia Bolivariana Escuela De Ingeniería. Obtenido de
http://eav.upb.edu.co/banco/sites/default/files/files/TesisSIMULACIONTRAFICO.pdf.
[8] Dr. Tom V Mathew, (2014), Traffic Engineering & Management (Web), IIT Bonbay.
[9] TRAFFIC SIGNAL CONTROL WITH ANT COLONY OPTIMIZATION, (2009) David
Renfrew, University San Luis Obispo.
[10] M. Dorigo and T. Stutzle, Ant colony optimization,(2004). Cambridge, assachusetts: MIT
Press.





























