Embed Size (px)
Citation preview

Filtros Digitales 2
Juan-Pablo CaceresCCRMA
Stanford University
Agosto, 2007
Contents
A simple lowpass filter
Determining the frequency reponse
Transfer Function
Linearity and Time Invariance properties
Canonical Forms
Impulse Response
Filtering as Convolution
Z Transform
Basic Filter Sections

A simple lowpass filter
Let’s get back to our Echoplex example.Let’s consider that the Delay is just 1 Sample
x[n] z−1
x[n − 1]y[n]
This filter can be described by the following Difference Equation:
y[n] = x[n] + x[n − 1], n = 0, 1, 2, 3, . . .
Remember that if T is the sampling period, then:
y(nT ) = x(nT ) + x((n − 1)T ), n = 0, 1, 2, 3, . . .
Usage example
Let’s use this x[n] = {1, 2, 3, 4, 5, 6, 7, 8} it our equation
y[n] = x[n] + x[n − 1]
Time Actual time Delayed input Outputn x[n] x[n − 1] y[n]
0 1 - -1 2 1 32 3 2 53 4 3 74 5 4 95 6 5 116 7 6 137 8 7 15
Note that y[0] is not defined as x[−1] is not defined either.
Determining the frequency response
We can determine the frequency response in three ways:
1. Experimental : we send different frequencies to the filter andwe measure the magnitude response
2. Analitic: we insert various sine waves in the Difference
Equation
3. Theoretical : we derive a formula for the response directlyfrom the Difference Equation
Experimental determination of the frequency
response
We feed our system with different frequencies and we measure theresponse.
For a sampling rate fs, the Nyquist sampling theorem tells us thata sinusoidal generator can generate frequencies in the range ±fs/2

Experimental determination of the frequency
response
We feed out system with sines of 8 different frequencies and weget an approximation to the frequency response:
Analitical determination of the frequency response
Instead of feeding out system signals we can analyze itmathematically, with the following advantages:
◮ We get exact results
◮ We avoid experimental errors
Out test signal will be a cosine
In the difference equation y[n] = x[n] + x[n − 1] we use:
x[n] = A cos[2πfnT + φ]
with A: amplitude, f : frequency, T : sampling period
y[n] = A cos[2πfnT + φ] + A cos[2πf(n − 1)T + φ]

Evaluation for some particular cases
y[n] = A cos[2πfnT + φ] + A cos[2πf(n − 1)T + φ]
Let’s evaluate what happens for the two limit frequencies for oursignal
1. f = 0: DC (Direct Current)
2. f = fs/2: Nyquist frequency
for f = 0:
y[n] = A cos φ + A cos φ
= 2A cos φ
for A = 1 and φ = 0
y[n] = 2
for f = fs/2:1
y[n] = A(−1)n cos φ + A(−1)n−1 cos φ
= A(−1)n cos φ − A(−1)n cos φ
= 0
y[n] = 0
1home work: prove that
A cos(πn + φ) = A(−1)n cos φ
Theoretical determination of the frequency response
Problems with the two previous methods:
We test one frequency at a time
So, let’s use as input a complex sine:
x[n] = Aej(2πfnt+φ)
With ω = 2πf , A = 0 y φ = 0 ⇒ x[n] = ejωnT ,
y[n] = x[n] + x[n − 1]
= ejωnT + ejω(n−1)T
= ejωnT + ejωnT e−jωT
= (1 + e−jωT )ejωnT
= (1 + e−jωT )x[n]

Transfer Function
y[n] = (1 + e−jωT )x[n]
Transfer Function of the lowpass filter
H(ejωT ) = (1 + e−jωT )
We can rewrite our equation as:
y[n] = H(ejωT )x[n]
for f = 0:
H(ejωT ) = H(e0)
= (1 + e−0)
= (1 + 1) = 2
for f = fs/2:
H(ejωT ) = H(ejπ)
= (1 + e−jπ)
= (1 − 1) = 0
Transfer Function
Transfer Function of the lowpass filter
H(ejωT ) = (1 + e−jωT )
Some properties of the Transfer Function:
◮ It is Time Invariant: it does not depend on n (time index)
◮ Only depends on ω, the frequency of the input

Amplitud Response, Phase Response
There are two things a filter does to a signal:
1. Changes the Amplitude as a function of frequency
2. Changes the Phase as a function of frequency
So, we can define:
1. Amplited Response: the frequency dependent attribute ofthe Gain Transfer Function
2. Respuesta de Fase: the frequency dependent attribute ofthe Delay de la Transfer Function
G(ω) , |H(ejωT )| Amplitude Response
Θ(ω) , ∠H(ejωT ) Phase Response
H(ejωT ) = G(ω)︸ ︷︷ ︸
Amplitud
ejΘ(ω)︸ ︷︷ ︸
Fase
Amplitude and Phase response of the lowpass filterFor our lowpass filter:
H(ejωT ) = (1 + e−jωT )
= (ejωT/2 + e−jωT/2)e−jωT/2
= 2cosωT
2(e−jωT/2)
It is easy to get:
G(ω) = |2 cosωT
2(e−jωT/2)|
= 2| cosωT
2|
= 2cosωT
2= 2 cos(πfT ), −fs/2 ≤ f ≤ fs/2
and
Θ(ω) = −ωT
2= −πfT = −π
f
fs, −fs/2 ≤ f ≤ fs/2

Amplitude and Phase response fo the lowpass filter
G(ω) = 2 cosωT
2− π ≤ ω ≤ π
Θ(ω) = −ωT
2, −π ≤ ω ≤ π
How to we interpret this linear phase?
Linearity and Time Invariance properties
A filter is Linear if:
1. Its input is proportional to its output
2. The ouput is the same for:◮ Input signals are first added and then filtered◮ Input signals are first filtered and then added
L{αx1 + βx2} = αL{x1} + βL{x2}
Dynamic compression is anexample of Non-Linear Filter

Linearity and Time Invariance properties
A filter is Time Invariant if no parameters of the Transfer
Function change over time.
An example of a Time Variant filter
Canonical Forms
The general difference equation for a causal, finite-order, linear
and time invariant filter is,
y[n] = b0x[n] + b1x[n − 1] + · · · + bMx[n − M ]
− a1y[n − 1] + · · · + aNy[n − N ]
y[n] =
M∑
i=0
bix[n − i] −
M∑
j=0
ajy[n − j]
Causal: only refers to present and past inputs and past outputs

Canonical Forms, Flow Diagram
y[n] = b0x[n] + b1x[n − 1] + b2x[n − 2] − a1y[n − 1] + a2y[n − 2]
Impulse Response
To characterize filters in the time domain (as opposed to thefrequency domain):
◮ We could apply signals at different frequenciers
◮ We could apply one signal that contains all frequencies
The Unitary Impulse function contains all frequencies
δ[n] ,
{1 n = 00 n 6= 0
Unitary Impulse Function
We define Impulse Response as:
h[n] , L{δ[·]} 2
So we have two characterizations of filters:
1. H(ejωT ): Frequency Response (frequency domain)
2. h[n]: Impulse Response (time domain)
2δ[·] notation is equivalent to δ[n], for n = 0, 1, 2, 3, . . .

An example of impulse response
y[n] = x[n] + 0.9y[n − 1]
= x[n] + 0.9x[n − 1] + 0.92x[n − 1] + · · ·
The reponse to the impulse will be,
h[n] =
{(0.9)n, n ≥ 0
0, n < 0
Filtering as Convolution
Let’s consider the following sampled sin,
x[n] = {0, 0.707, 1, 0.707, 0,−0.707,−1,−0.707, . . . }
We can write x[n] as,
x[n] = [0·δ[n]]+[0.707·δ[n−1]]+[1·δ[n−2]]+[0.707·δ[n−3]]+. . .
Which gives us:
y[n] =
n∑
k=0
x[k]δ[n − k]
= x[n] ∗ δ[n]
= δ[n] ∗ x[n]
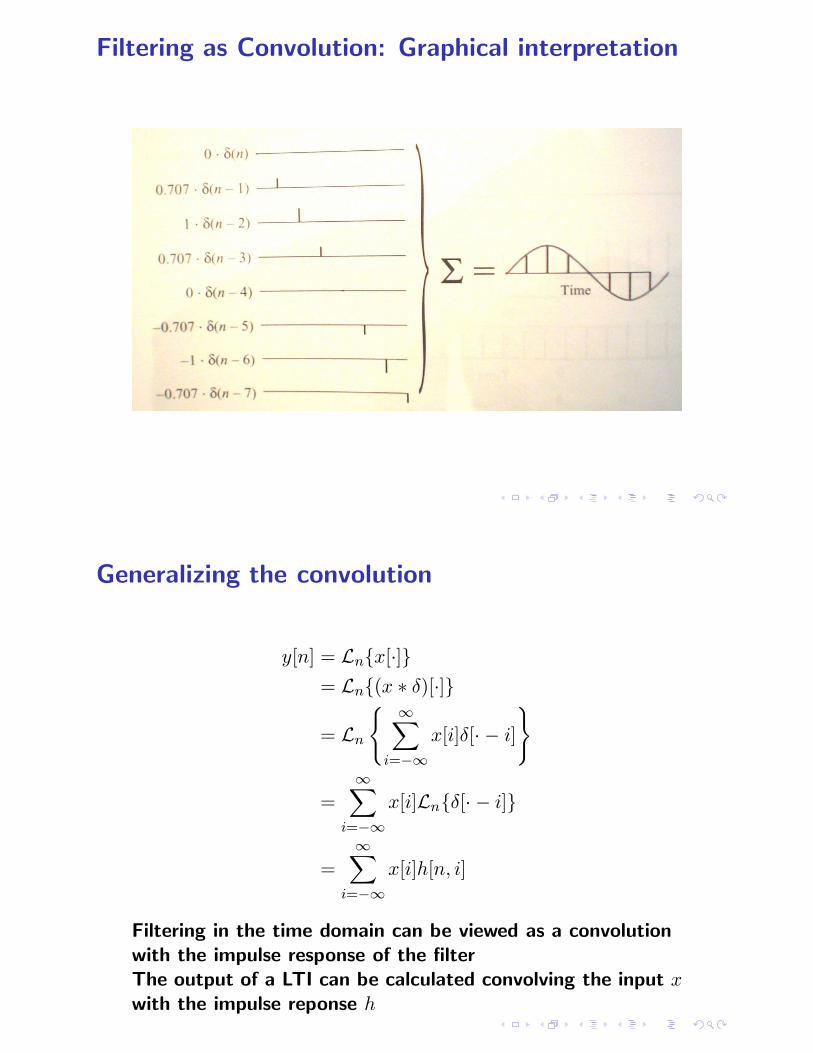
Filtering as Convolution: Graphical interpretation
Generalizing the convolution
y[n] = Ln{x[·]}
= Ln{(x ∗ δ)[·]}
= Ln
{∞∑
i=−∞
x[i]δ[· − i]
}
=
∞∑
i=−∞
x[i]Ln{δ[· − i]}
=
∞∑
i=−∞
x[i]h[n, i]
Filtering in the time domain can be viewed as a convolutionwith the impulse response of the filterThe output of a LTI can be calculated convolving the input xwith the impulse reponse h

Z Transform
Z(z) =
∞∑
n=0
x[n]z−n Z Transform
A shorthand for this notation is
X = Z{x}
Z Transform theorems
Theorem (Shift)
x[n −△] ↔ z−△X(z), △ ≥ 0
Theorem (Convolution)
x ∗ y ↔ X · Y

Z Transform of the Convolution
If we have,y[n] = (h ∗ x)[n]
Take the Z transform on both sides of the equaction,
Y (z) = H(z) · X(z)
We can finally obtain the Transfer Function,
H(z) =Y (z)
X(z)Transfer Function
This comes directly from the Convolution Theorem and appliesprovided that the filter is LTI.
Z Transform of the Difference Equation
For our generic difference equation case,
y[n] = b0x[n] + b1x[n − 1] + · · · + bMx[n − M ]
− a1y[n − 1] + · · · + aNy[n − N ]
Taking the Z Transform on both sides of the equation,
Z{y[·]} = Z{b0x[n] + b1x[n − 1] + · · · + bMx[n − M ]
− a1y[n − 1] + · · · + aNy[n − N ]}
= Z{b0x[n]} + Z{b1x[n − 1]} + · · · + Z{bMx[n − M ]}
− Z{a1y[n − 1]} + · · · + aNZ{y[n − N ]}
= b0X(z) + b1z−1X(z) + · · · + bMz−MX(z)
− a1z−1Y (z) + · · · + aNz−NY (z)

Z Transform of the Difference Equation
We define,A(z) = 1 + a1z
−1 + · · · + aNz−N
B(z) = b0 + b1z−1 + · · · + bMz−M
Rearranging the equations,
H(z) =Y (z)
X(z)=
b0 + b1z−1 + · · · + bMz−M
1 + a1z−1 + · · · + aNz−N=
B(z)
A(z)
Deriving the Frequency Response
To obtain the Frequency Response it is enough to replace z in thetransfer function with,
z = ejωT
That is, if we have a transfer function H(z), the frequencyresponse is,
H(ejωT )

Basic Filter Sections: One Zero
One Zero filters,
y[n] = b0x[n] + b1x[n − 1]
One Zero

One Pole
One Pole filters,
y[n] = b0x[n] − a1y[n − 1]
One Pole

Two PoleTwo Pole filters,
y[n] = b0x[n] − a1y[n − 1] − a2y[n − 2]
Two Pole

Two Zero
Two Zero filters,
y[n] = b0x[n] + b1x[n − 1] + b2x[n − 2]
Two Zero

Allpass Filters
If we take a Biquad transfer function,
H(z) = g1 + β1z
−1 + β2z−2
1 + a1z−1 + a2z−2
An Allpass filter requires that,
|H(ejωT )| = 1
For this to be true the Biquad has to meet this requirement,
B(z) = z−2A(z−1) = a2 + a1z−1 + z−2
Conclusions
The selection of a filter implies a compromise between,
◮ Precision of desired response vs. computational load
◮ “Warm-up” time
◮ Selecting between IIR and FIR,◮ IIR are more efficient but introduce phase distortion.◮ Longer impulse responses are needed to get the same
frequency response with a FIR filter





























