Embed Size (px)
Citation preview

Running head: Rotary Cookie Depositor 1
Rotary Cookie Depositor
Bryan Malmquist, Taher Abdulalatif
Purdue University Northwest
MET 497
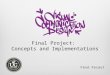
Figure 1, Solidworks isometric view of assembly
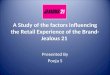
Figure 2, View of assembly inside of frame

Running head: Rotary Cookie Depositor 2
Abstract
For our project we designed and built a cookie depositor that will have rotating wires that will cut dough being extruded out of a die. The purpose of designing this machine is to get a faster deposit ratio so bakeries can increase their profit margins by being able to produce more cookies in less time. The arms will be on a rotating ¾” shaft that will be driven by a ¼ hp motor rotating at 30 rpm. With the 30 rpms of the motor and having 2 wires we will be able to get 60 cuts per minute. This is higher than the average 30-40 cuts per minute by most of the cookie depositing machines in the field now. The goal of this paper is to show how we built the machine and the customizability of the shape and sizes of the cookies being deposited.

Running head: Rotary Cookie Depositor 3
ContentsAbstract.......................................................................................................................................................2
Table of Figures...........................................................................................................................................4
Introduction.................................................................................................................................................5
Specifications...............................................................................................................................................5
Calculations.................................................................................................................................................6
Shaft Stress Calculations..........................................................................................................................6
Motor and Gearbox Calculations.............................................................................................................7
Bearing Calculations................................................................................................................................8
Theoretical Background.............................................................................................................................10
Methodology.............................................................................................................................................11
Customizable Shapes and Sizes.................................................................................................................12
Assembly Instructions................................................................................................................................13
Conclusion.................................................................................................................................................13
Budget.......................................................................................................................................................14
Project Schedule........................................................................................................................................15
Risk Assessment........................................................................................................................................16
Bibliography...............................................................................................................................................17
Appendix and mechanical drawings..........................................................................................................18
Table of FiguresFigure 1, Solidworks isometric view of assembly.........................................................................................1Figure 2, View of assembly inside of frame................................................................................................1Figure 3, 304 Stainless Steel Yield Strength (Solidworks, 2016).................................................................22Figure 4, Motor and Gear Specs (Dayton Motors, 2016)...........................................................................23Figure 5, Ball bearing speed and life factors .............................................................................................24Figure 6, Flange bearing being used on machine (Mcmaster Carr: 2016)..................................................25Figure 7, Current industrial extruding cookie depositor............................................................................26Figure 8, Side view of arm assembly show travel path..............................................................................27Figure 9, Die blank to show usable surface...............................................................................................28Figure 10, Different sized cookie dies........................................................................................................28Figure 11, Final assembly budget..............................................................................................................30Figure 12, Gantt chart of our project schedule..........................................................................................31Figure 13, arm assembly............................................................................................................................35

Running head: Rotary Cookie Depositor 4
Figure 14, Final assembly view with frame hidden....................................................................................36Figure 15, Coupler Assembly.....................................................................................................................37Figure 16, Motor coupler Spider connector..............................................................................................38Figure 17, ¾” Motor coupler.....................................................................................................................39Figure 18, 16” Die Blank............................................................................................................................40Figure 19, Die Holder.................................................................................................................................41Figure 20, Frame Weldment Assembly......................................................................................................42Figure 21, Frame front guard.....................................................................................................................43Figure 22, Frame Back wall........................................................................................................................44Figure 23, Frame Side Wall........................................................................................................................45Figure 24, ¾ Shaft......................................................................................................................................46Figure 25, Rotary Arm................................................................................................................................47Figure 26, UHMW Paddle..........................................................................................................................48Figure 27, Lovejoy motor Coupler.............................................................................................................49Figure 28, Blue UHMW..............................................................................................................................50Figure 29, ¼ hp gear motor.......................................................................................................................51Figure 30, Front View of assembly.............................................................................................................52Figure 31, Front View with die...................................................................................................................53Figure 32, Custom Sized Dies.....................................................................................................................54

Running head: Rotary Cookie Depositor 5
Introduction
The object of this project was to build a different styled cookie depositor then other depositors currently on the market. All of the current wire cut cookie depositors are using a linear motion to cut cookies. The problem with using the linear motion depositors, is that there is wasted time of waiting for the wire to travel back to its home position. Our idea was to make a machine with two wires, that way after the first wire finish’s its cut, the second wire will already be on its way to make the next cut. Our machine will be able to be integrated with and dough feeding system, by creating an 18.5 inch by 8 inch hopper that will slide between the die and die holder. This report will give all of the detail drawings and models of how the machine will be machined and assembled.
Specifications
¼ hp motor 30 RPM’s 10 inch diameter travel path 304 Stainless Steel ¾ inch stainless steel shaft. 24”x24”x16” frame

Running head: Rotary Cookie Depositor 6
Calculations
Shaft stress calculations Motor and Gearbox calculations Bearing calculations
Shaft Stress Calculations
t max= T(D)/J
T=Torque from gear box
D = Diameter of shaft
J = Polar Moment of Inertia
826LBF*in (.75in)/.497in^4
=1,246 PSI
Yield Strength of SS-304 = 30,000 PSI
(Material Properties for 304 stainless steel pictured below)
1,246 is well below the yield strength of 304 stainless steel, so we are able to keep our ¾” shaft
Figure 3, 304 Stainless Steel Yield Strength (Solidworks, 2016)

Running head: Rotary Cookie Depositor 7
Motor and Gearbox Calculations
We will be using a motor that has 1/4 Hp and a max speed of 1,725 RPM’s paired with a 57:1 ratio gear box( Motor and gearing specs pictured below). Doing this will give us close to our desired 30 RPM.
1,725RPM/57:1 ratio = 30.26 RPM
Figure 4, Motor and Gear Specs (Dayton Motors, 2016)

Running head: Rotary Cookie Depositor 8
Bearing Calculations
P=VRP = (1.0) (20 lbs)
(1.0 given from inner race of bearing rotating, 20 taken from radial load to cut dough)
C=P(fL)/fn
C = Basic dynamic load rating
P= Equivalent load (solved above)
fL= Life Factor (Taken from chart below)
fN= Speed Factor (Taken from chart below)
Figure 5, Ball bearing speed and life factors (Machine Elements in Mechanical Design by: Robert L. Mott)
C= 20lbs(1.6)/1.05 = 30.47 lbs
With this Basic dynamic load being so low we are able to use the flange mounted bearing below, which has a dynamic radial load capacity of 2,877 lbs.

Running head: Rotary Cookie Depositor 9
Figure 6, Flange bearing being used on machine (Mcmaster Carr: 2016)

Running head: Rotary Cookie Depositor 10
Theoretical Background
Right now there are two types of cookie depositors that are used. There are extruders where the machine uses small nozzles pushing the dough out to the desired shape that you are looking for. These machines are very complicated and very expensive being in the $100,000 range. Then the other type of machine is a wire cut depositor which use a wire to cut the dough being extruded from a die. The wire travels across the die making a cut and depositing cookies onto a conveyor, then drops and travels back to its home position getting ready to make another cut. These machines are less expensive than the extruders, but are slower in production.
The depositor we want to make has a similar idea as the wire cut, also using a stainless steel wire to cut through the cookie dough. We want to make our have a rotational cut though instead of traveling along the x-axis then dropping and coming back to the home position. This is a large waste of time waiting for this machine to come back to its home position waiting to make a cut.
Figure 7, Current industrial extruding cookie depositor

Running head: Rotary Cookie Depositor 11
Methodology
Our machine will have two wires instead of 1, constantly travelling in a circular path. We will not get such a wasted time using a circular path, which will increase production. One problem we will have with our machine is getting the cookies to drop cleanly onto the conveyor belt without hitting the second wire. We have planned that when the top wire is finished making its cut, the bottom wire should have traveled far enough so the cookies will be able to drop right between the two wires. If we are not able to get the cookies to drop between the two wires we will have to make a piece of plastic that will insert into our arms, which will help push the cookies forward a little bit, to get out of the way of the other wire.
Figure 8, Side view of arm assembly show travel path

Running head: Rotary Cookie Depositor 12
Customizable Shapes and Sizes
Cookie shapes and sizes will be customizable within the restraints of the die blanks that will be used. The die blanks have a useable surface area of 16.5inches x 5 inches (See figure 7 below for example). Any size and shape can machined onto the die blank (See figure 8 below for example of shapes and sizes), but cannot promise that all shapes will cut correctly because of the radius from the radial motion being used by the wire cutters. This machine will be best used for regular circle shaped cookies and the diameter of the cookie can be changed to the desire of the customer within the limits of the die blank. Cookie weights can also be adjusted by increasing the speed of the feed rollers, to help extrude more dough through the die. The customer will have to test the motor speed and adjust it until they get the desired results.
Figure 9, Die blank to show usable surface
Figure 10, Different sized cookie dies

Running head: Rotary Cookie Depositor 13
Assembly Instructions
Step 1 - Bolt bearings to frame
Step 2 – Slide shaft through first bearing
Step 3 – Slide on the two rotary arms and keep 18 inches apart from inside to inside
Step 4 – Place UHMW paddles in bottom slots of arms and bolt both sides.
Step 5 – Place wire holders in tops holes of arms and thread wingnuts on back side.
Step 6 – Place wire in wire holder and twist tight
Step 7 – Place couplers on motor and shaft with spider connector
Step 8 – Place Die holder in the cutout of frame.
Step 9 – Place die inside of die holder
Step 10 – Assembly is complete and motor is ready to be started. Customer should set up their dough feeding system before starting machine.
Conclusion
Our project was moderately successful. Our machine is fully assembled and operational with a couple of flaws. The 30 rpms that we had chosen may have been a little too fast causing an inconsistent drop in our cookies. The shaft is spinning so fast, that if the dough stick a little bit to the wire that it does not fully contact the paddle to kick it forward. While the cookies all drop, there is no uniformity as to how they drop onto the pan. This would be a problem with a conveyor belt traveling underneath it at a constant speed, which could potentially cause the cookies to stack on top of each other from the inconsistent drops. Some slight modifications to the speed of the shaft or to the UHMW paddles could give us the uniform drop we are looking for. Customers who would purchase this machine would have to adjust their machines and use some trial and error, when they first get them to also get a uniform drop.

Running head: Rotary Cookie Depositor 14
Budget
Figure 11, Final assembly budget
Cost was a big thing that hindered our project. The $1,670 price is quite high. We were able to reduce some costs by buying a gear motor that had a gear box built into it, saving us money from having to buy a gear box. The biggest of our costs was the motor, Die, Die holder and labor. The costs of the die and Die holder are so high because of all the material and machining being done to the parts.

Running head: Rotary Cookie Depositor 15
Project Schedule
Figure 12, Gantt chart of our project schedule
Our project was delayed quite a bit from having to wait for our arms to be waterjet cut. The fabricator making the arms for us were over 3 weeks late, setting us way back in the assembling of our machine.

Running head: Rotary Cookie Depositor 16
Risk Assessment
The Possibility of the operator’s finger coming into contact without the guard in place is easily possible, putting a clear plexiglass guard on the front of the machine blocks the operator from touching the wire on the machine, but still gives visibility of the operation.
Electric Shock could come from the motor, so placing a caution sticker on the motor will warn the operator to be cautious of the possibility of electric shock.
Plastic scrapings in the dough is a possibility if anything comes into contacts with the UHMW paddle. Changing the UHMW from white to blue, does not make their any less of a possibility of this happening and doesn’t change the severity, but does make the UHMW highly visible so you and see it in the dough and throw the batch away
Your finger being pinched between the bearing and the arm is not likely to happen with the plexiglass guard in place, but a caution sticker will be placed on the frame warning the operator of a nippoint

Running head: Rotary Cookie Depositor 17
Cutting your skin on the frame was a good possibility when the frame was first welded. Grinding the welds and surfaces smooth and getting rid of all the burs will lower the likeliness of this happening.

Running head: Rotary Cookie Depositor 18
Bibliography
Manley, D. J. R. Manley's Technology of Biscuits, Crackers and Cookies. Cambridge: Woodhead, 2011. Print.
Ellis, Peter E. Cookie & Cracker Manufacturing. Washington, D.C.: Biscuit and Cracker Manufacturers' Association, 1990. Print.
"What Is Food Science & Technology? Learn What Food Science Is All about and Hear from People That Work in the Profession about What It's like to Work in Food Science." What Is Food Science & Technology? N.p., n.d. Web. 05 Oct. 2015.
"Industrial Dough Mixers." Industrial Dough Mixers. N.p., n.d. Web. 05 Oct. 2015. http://www.cmc-america.com/
"4 Innovative Finds at PROCESS EXPO." Chem.Info. N.p., n.d. Web. 05 Oct. 2015.
"IMAGES: Cookie-Cutter Math." Science 282.5389 (1998): n. pag. Web.
Mott, Robert L. Machine Elements in Mechanical Design. Upper Saddle River, NJ: Pearson/Prentice Hall, 2004. Print.
"McMaster-Carr." McMaster-Carr. N.p., n.d. Web. 21 Apr. 2016.
Oberg, E., Jones, F. D., Horton, H. L., & Ryffel, h. H. (1996). Machinery's Handbok. In E. Oberg, F. D. Jones, H. L. Horton, & h. H. Ryffel, Machinery's Handbok
"Dayton Electric Motors." Dayton Electric Co., LLC. N.p., n.d. Web. 21 Apr. 2016.

Running head: Rotary Cookie Depositor 19
Appendix and mechanical drawings

Running head: Rotary Cookie Depositor 20
Figure 13, arm assembly

Running head: Rotary Cookie Depositor 21
Figure 14, Final assembly view with frame hidden

Running head: Rotary Cookie Depositor 22
Figure 15, Coupler Assembly

Running head: Rotary Cookie Depositor 23
Figure 16, Motor coupler Spider connector

Running head: Rotary Cookie Depositor 24
Figure 17, ¾” Motor coupler

Running head: Rotary Cookie Depositor 25
Figure 18, 16” Die Blank

Running head: Rotary Cookie Depositor 26
Figure 19, Die Holder

Running head: Rotary Cookie Depositor 27
Figure 20, Frame Weldment Assembly

Running head: Rotary Cookie Depositor 28
Figure 21, Frame front guard

Running head: Rotary Cookie Depositor 29
Figure 22, Frame Back wall

Running head: Rotary Cookie Depositor 30
Figure 23, Frame Side Wall

Running head: Rotary Cookie Depositor 31
‘ Figure 24, ¾ Shaft

Running head: Rotary Cookie Depositor 32
Figure 25, Rotary Arm

Running head: Rotary Cookie Depositor 33
Figure 26, UHMW Paddle

Running head: Rotary Cookie Depositor 34
Figure 27, Lovejoy motor Coupler

Running head: Rotary Cookie Depositor 35
Figure 28, Blue UHMW

Running head: Rotary Cookie Depositor 36
Figure 29, ¼ hp gear motor

Running head: Rotary Cookie Depositor 37
Figure 30, Front View of assembly

Running head: Rotary Cookie Depositor 38
Figure 31, Front View with die

Running head: Rotary Cookie Depositor 39
Figure 32, Custom Sized Dies