Embed Size (px)
Citation preview

IEEE TRANSACTIONS ON COMPUTERS, VOL. c-20, NO. 9, SEPTEMBER 1971
Finding Events in a Sea of Bubbles
HOWARD S. WHITE
Abstract-DAPR is a digital automatic pattern recognition system,designed to find and measure events in bubble chamber film withoutmanual intervention. It is able to measure film which has comedirectly from the photographic development process, and to produceon magnetic tape a digital abstraction of the information contained inthe film, from which a subsequent selection of desired events takesplace by means of a digital scanning process.
The DAPR system at Lawrence Radiation Laboratory, Berkeley,achieved production status earlier this year, and already has ab-stracted more than fifty thousand bubble chamber picture sets.Although development continues in some areas of the programs,DAPR measurements are being used by physics experimenters in theanalysis of their data. It is expected.that DAPR will process an in-creasing fraction of the data as the measurement of current experi-ments is completed, and that of new experiments is begun.
Index Terms-Automatic photointerpretation, bubble chamberevents, digital feature extraction, event recognition, nuclear inter-actions, optical digitization, track following, vertex finding.
DAPR SYSTEM GOALSI-N PLANNING DAPR, a number of goals were set as
standards by which its performance could be rated. TheHAZE system for manual scanning and automatic
measurement of bubble chamber data was chosen as thebasis for comparison, since extensive experience with it hadbeen gained in a wide variety of experiments [1] and be-cause of its excellent measurements at low cost. The basicinformation to be obtained from the bubble chamber pic-ture is the spatial orbit for each of the particles which formtracks, from which the particle's momentum can be de-termined, and the bubble density along the orbit, fromwhich the particle's velocity can be determined.The most important requirement was that DAPR per-
form as well as HAZE with regard to the accuracy of thepoints characterizing each track's locus, and to the measure-ment of the fractional digitizing which indicates the bubbledensity along the track. Another important goal relates tothe fidelity of the event: that the correct tracks be associatedwith the events found. Because of the desire to obviatemanual scanning, the discovery of all events within thesearch area is of great importance, as is also the absence offake events caused by identifying random configurations asevent vertices. Finally, DAPR must operate as cheaply asthe HAZE system to be justified economically.
DAPR HARDWAREThe hardware of the DAPR system has been in use since
1963 as part of the HAZE system. The system uses an IBM709411 computer, which is operated in a multiprogrammed
Manuscript received November 12, 1970. This work was supported bythe U.S. Atomic Energy Commission under Contract W-7405-eng-48. Apreliminary version of this paper was presented at the IEEE Symposiumon Feature Extraction and Selection in Pattern Recognition, Argonne, Ill.,October 5-7, 1970.
The author is with the Lawrence Radiation Laboratory, University ofCalifornia, Berkeley, Calif. 94720.
mode in a manner like that of contemporary systems. Filmis digitized by a flying spot digitizer (FSD) of the Hough-Powell type [2] which is operated on line to the computer.The scan line of the FSD is generated mechanically, thespot being formed by the intersection ofa fixed slit and a slitcarried by a rotating disk. A mercury vapor arc lampilluminates this aperture to produce a spot about 18 micronsin diameter which is mechanically constrained to move atuniform velocity along a straight line. Motion of the filmmounted on a precision measuring engine allows thedigitizing of a raster scan of the film image. The track widthin typical bubble chamber images is 25 microns, and in-dividual hits on a well separated track yield an rms scatterof about 1.5 microns. The bubble density is measured bycomparing the number of digitizings to the total number oftimes the spot intersects the track locus.
Since DAPR operates without manual guidance, it mustconduct a scan of the entire picture area for events of inter-est. On the other hand, the high inertia of the mechanicalstage precludes a random return to local areas of the image.The number of digitizings which are obtained from oneraster scan ofthe image is too great to store in core memory,and the staging of these on the disk is relatively expensivewith this computer. Therefore, DAPR was designed tooperate its track-following procedures in a real-time rela-tionship with the data acquisition hardware, so that only agreatly reduced set of data need be transmitted to the diskfor further processing. Since the FSD produces some 15 000words of input per second to the real-time program, thespeed ofthe computer places a moderately severe restrictionon the complexity of the track-following procedures.
TRACK FOLLOWINGThe real-time program controls the FSD and performs
the track-following process. Output for each track consist-ing of 18 well distributed master points and a measure ofbubble density, is staged to the disk for further processingby the programs which occupy the second priority levelwithin the multiprogrammed environment.When a few images have been accumulated on the disk,
this second phase of processing is activated. Fiducials areidentified, and unwanted measurements of recurrent marksin the chamber image are deleted. The point sets are com-bined or partitioned until ideally each actual track in thechamber image is represented by exactly one set ofpoints inthe measurement data. A track certification routine usesthe rms scatter from a fitted polynomial of appropriatedegree to achieve these decisions.
EVENT RECOGNITIONMany elements of pattern recognition have been used to
bring the data to this point in the reduction process, but
988

WHITE: FINDING EVENTS IN A SEA OF BUBBLES
XVi
ri
$1I'i..
x0 LS-Xof_X
(a)
H.
(b) (c)
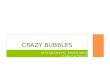
Fig. 1. Typical frame from LRL 72-in HBC showing DAPR extraction of 4-prong event. (a) Actual film image. (b) Display of geometricinformation describing image on DAT. (c) Desired event has been selected by DAPR process.
true feature extraction begins here. The primary aim of thispaper is to discuss these procedures of feature extractionwhich find and identify event vertices, and which associatethe correct tracks with them from all surrounding tracks.
Let us briefly review the characteristics of the data whichare presented to this feature extraction phase ofthe process-ing. In the ideal case, three image data sets, correspondingto the' three "stereo" yiews of the bubble chamber, wouldeach have their track data sets standing in one-to-onecorrespondence with the tracks which a person mightperceive upon viewing the film images. This ideal is closely
approximated when the beam tracks are well separated andthe event has an open configuration, as shown in Fig. 1. Alltoo frequently the event is obscured by a bundle of closelyspaced beam tracks, or by an electron spiral unrelated to theevent. In some of these regions of confusion, the trackimages are not resolved by the digitizer, so that digitizingsare made on the composite image of multiple tracks. Insome regions, the digitizings are so densely distributedthat no clustering along individual tracks can be discernedby the track-following program, and it is not able to cor-rectly associate digitizings with the proper point sets., Very-
989 :;
-1 - 1- - -. I - - --.. --
.. .1- 1. 1-..,- 1- - -. I - -1 ---1 --. -.....
... -- 1-
5
-,;.f-;SS

IEEE TRANSACTIONS ON COMPUTERS, SEPTEMBER 1971
X 1111 I11 I-1 I 11 11 l11ITX
..
X ~ '.
'. /; . :
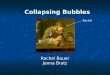
X'- I: I.11'11 I' '1 '1'.1 11 1 IXFig. 2. Image of LRL 25-in HBC which contains two problem events.
2-prong event at top is overlaid by two additional beam tracks and afiducial arm. 2-prong event with secondary contains a short connectingtrack that has only a small angle deviation from another track at eithervertex. Both events place a considerable demand upon track-followingprocedures.
short tracks are not found in the track-following process,.and some pairs of tracks which meet in the vertex at nearly180 degrees are followed as one continuous unit. The con-figuration of some events is such that serious overlappingmay occur from tracks of the event alone. Some examplesofthese images are given in Figs. 2-7. Our experience showsthat nearly halfthe events are in some degree affected by oneor more of these problems.As a basis for the vertex recognition, we therefore have
point sets which generally give a highly accurate representa-tion of the track images, but which may have a few distortedpoints due to confused regions. Generally, the entire track isrepresented, but sometimes a substantial part has not beenfollowed, usually the part nearest to the vertex. iGenerallythe point sets represent one track, but sometimes two arejoined at a kink which has not been partitioned, and some-times two point sets redundantly represent one track. Thefeature extraction process would nearly be trivial if onlyideal images were given; most of its complexity comes fromt processes which extract event vertices from the less thanidal images with which it must deal.
VERTEX FINNDINGFirst a list of candidate vertices is determined separately
in each view by searching for a cluster of endpoints. TheVprcess is illustrated in Fig. 8. A fairly large box is con-truted around each endpoint in the central region of the4bamber image, and all other endpoints within the box are
XI lllIIIIII 11111 11IlIllFig ~ ~ ~~~~ **.3.Eeto.pra,urltdt 2-pon evn,ovrasrcolpoo
- # \ .~ \> ; s. .''
XI ;,*
*-x,, .j
X .' '':''x*, ,;
.. i, ..
-I IxFig. 4. 2-prong events in upper right corner give problems. The earlier
event has a very small angle scatter with a short recoil track and ismade more difficult by being superimposed on an adjacent beam track.The other event has both outgoing tracks very forward, with a verysmall opening angle, so that the vertex location is subject to perturba-tion by small distortions of points representing tracks.
9%
I
XJ .'I 1111, 1-11.1 11 1- I

WHITE: FINDING EVENTS IN A SEA OF BUBBLES
X 1. 1 11 .III 11 11 I HX X., 11 11- 1 1 11.I
.... . "
_9> . .0
/ ,
a
,.. .8 ,
,
X i'..
..
r. :
4 1.t
j.. I
! -
_
', E.Q
:x. i* /
,;, xl
,x4~~~~~~~~~
X ,, i' ''
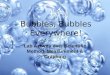
X. 1111'1- I1 11 I II-'I1-11 I 11XFig. 5. Production and decay of a V particle is shown above and to the
right ofchamber center. Short track was produced by X particle beforeits decay. It is important to keep the DAPR program from finding a2-prong event composed of all tracks except short I track. 2-prongevent below this is ideal for DAPR.
Is xL
* x
X II Ill li1 11 IxFig. 7. 2-prong event at lower right is also a problem due to its con-
figuration. A person would see'the few bubbles of lightly ionizing trackand infer that the two tracks are mostly superimposed, but these appearno different than other noise to DAPR as it stands now.
X 11 111 111 Il I IFig. 6. 2-prong event with secondary at lower right ofthis image obscures
itself. A person perceives the change in bubble density at vertex andinfers that track leading to secondary 2-prong must lie beneath recoiltrack. DAPR has not yet been able to do as well.
1660 yt
1- 6400 yL --e
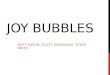
Fig. 8. Primary search for "view vertices." Vertex recognition algorithmdepends upon a cluster of endpoints and nearby intersection of trackorbits to locate provisional vertices.
considered. Throughout the event recognition process, eachtrack is represented by a circle. If the circle under considera-tion and one whose endpoint is within the box intersectquite close to at least one of the endpoints, that point ofintersection is taken as a provisional vertex. All circleswhose endpoints lie within the box are added to this provi-sional vertex if they pass close to it. The vertex is furtherscreened to eliminate redundant discoveries and somecommon classes of fakes. A best point of intersection iscalculated by a least squares procedure, which also developsa chi-squared estimator of the probability that all tracksintersect in a common point. Survivors of this process be-come "view vertices" and are collected into a table alongwith a list oftheir included tracks. When all ofthe endpoints
., I.,
'; I
A..
If -..1 t,
4'* .-
.
1%of -.
.4'. -~
.I
"'
.04..,,
a
I
r,
x
' .- --
I;,
, j
.1N.
/
.,x-
;'
L
.v
991
.x 1.1 III 11 I 11' 11 11 11 X-

IEEE TRANSACTIONS ON COMPUTERS, SEPTEMBER 1971
within the central area of the image have been considered,the other views are searched in the same way, without ref-erence to vertices found in previous views.When all three views have been searched, their tables of
"view vertices" are compared to find spatial agreements.Since the optical properties of the chamber and the cameralenses are known by the program, the three "view vertices"are highly constrained, and their constituent tracks can beused to develop a reliable location of the vertex within thechamber space, as well as a chi-squared estimator of proba-bility, that all intersect in a common spatial point. Thisintercomparison of views is also the most powerful testavailable to the human scanner for answering the questionof whether a vertex is a true event or an accidental con-figuration. All spatial vertices resulting from "viewvertices" found in two or three views and which lie withinthe chamber volume are retained. A vertex location ispredicted in the third view if it was not otherwise detected,and various redundancies due to tracks being split betweentwo vertices in the single-view process are cleared up at thistime.Some tracks may still remain unassociated with their
proper vertices for a variety of reasons. Sometimes thetrack-following process fails to produce a point set whichcovers the entire track. Sometimes two tracks intersectingat a 180° angle are followed as one, giving no end-point atthe vertex. Occasionally the vertex point is poorly de-termined by the single-view calculation, so that tracks arenot properly associated with it. And predicted verticesinitially have no associated tracks. Each surviving "viewvertex" is therefore compared to all tracks not yet associatedwith it in a process known as the exhaustive search.The program assumes that all tracks actually participat-
ing in the event will have been associated with their "viewvertices" at the conclusion of this process. Frequently othertracks such as nearby beam tracks and tracks which areunassociated with the vertex but point toward it, are in-cluded as well.
TRACK MATCHA track-matching procedure is used next to relate tracks
in the different views. Many tracks accidentally passingnear a "view vertex" can be excluded because no matchexists in other views. Ambiguities are flagged for furtherdiscrimination. Since the vertex point is well determined,point sets which included parts of two tracks can now bepartitioned, and their separate parts matched as appro-priate.Although no ambiguities would remain in the ideal event
at this point, many actual events need further work to re-duce them to the unambiguous status. The procedures usedto simplify vertices are mostly based on probabilistic argu-ments, but are really justified on empirical grounds. Wehave adopted the philosophy that tests based on properlyweighted geometric factors are compelling when noambiguities are present, and that ambiguities can be re-solved only by choices which are unlikely to be the result ofaccidental configurations. The cleanup procedures favor
three-view track matches over two-view matches, since anaccidental three-view agreement is very much less probablethan is a two-view match. Preference is given to sets whichdefine the same length of track-following coverage in thedifferent views. The tracks are classified into severalcategories in terms of their resemblance to beam tracks, andpreference is given to agreement of this classification be-tween views. Surviving ambiguities are resolved by meansof a chi-squared test applied to the agreement of radius inthe three views. Since only one beam track can participatein an event, and because many are often found in the closevicinity of the vertex as a consequence of the clustering ofbeam tracks into a tight bundle, the program selects thebeam track in each view which passes close to the vertexand yields the best fit to the true beam orbit. A final testuses the known fact of charge conservation at the vertex tofurther determine if the track set is completely plausible inthe context of the experiment.The best justification for these procedures is empirical: do
they reduce ambiguities, and yield the same final associa-tion of tracks and vertices which one would correctlychoose by manual processes? We find that they do reducemany ambiguities and almost never produce a false choice.For example, the radius chi-squared test was evaluated byreprocessing a large number of events that had been mea-sured in the HAZE mode, where track-matching assign-ments are made manually. A careful study was made of the128 tracks having disagreement between the manual HAZEchoice and the automatic DAPR choice. In 127 of these, theDAPR choice was clearly the correct one, while the remain-ing track was entirely indeterminate, and we found no wayof distinguishing which ambiguous choice was valid.
DATA ABSTRACT TAPEThe vertex recognition program writes a tape containing
all ofthe tracks as point sets, together with a table giving thespatial vertices and references to their associated tracks.This data abstract tape (DAT) is the digital equivalent ofthe film, but it contains a set of reduced measurements ofeach track, together with the physical vertices in perceivedform, all expressed in digital format convenient for thecomputer. On this tape, the features of the bubble chamberpictures have been extracted and written compactly forfuture use by the computer.The process of selecting events of a certain configuration
has long been achieved by visual scanning. Since scanningcould proceed much more rapidly than measurement, it wasfirst used to screen only the most suitable events for mea-surement. In the DAPR process, this sequence has beenreversed. It is necessary that some measurement has takenplace for digital "scanning" to occur, and since in DAPRthis has been a complete and highly accurate measurement,no further access to the film is required.The DAPR scanning process compares events described
on the DAT with scanning criteria which are supplied bythe experimenter. The criteria may be identical to thosegiven the manual scanner: a topological description of theevent, instructions for naming participant tracks, the area
992

WHITE: FINDING EVENTS IN A SEA OF BUBBLES
to be searched, and other such selection criteria. In addi-tion, since a very good estimate of the momentum vectorhas been developed for each track, much more sophisti-cated criteria can be given, including those which seek othertracks or vertices some distance away from the primaryvertex, and identify them by means of kinematical calcula-tions. Such calculations are not practical for manual scan-
ners.
The DAPR scanning program edits the data from theDAT to a magnetic tape, where they are completely equiv-alent to data from either conventional microscope or elseHAZE measurements. All vertices meeting the criteria ofany desired event are written in standard form, with thetracks named and ordered in accordance with the scanninginstructions, and with the point sets and ionization in-formation supplied from the data sets contained on theDAT. The DAPR scanning process is intentionally a very
rapid one, so that one may scan for events of interest with-out being burdened by the requirement of searching forothers of future interest because of prohibitive rescanningcosts. In practice, the DAT can be scanned at the rate ofabout 10 000 picture sets per hour ofcentral processor time.This compares with a maximum rate of 200 picture sets per
hour for manual scanning.
DAPR RESULTS
The success of DAPR can best be measured by compari-son to the basic goals previously mentioned. A very detailedcomparison was made between the measurements in bothHAZE and DAPR modes of about 3000 two-prong events[3]. This comparison established that the quality ofmeasurements of events output by DAPR is fully as goodas that from HAZE. Because the comparisons were madeon a track-by-track basis, histograms could be constructedof the difference between DAPR and HAZE measurementsof the final track orbital parameters, scaled by their ap-
propriate errors. Figs. 9-11 show these histograms for theangles and momentum which describe the tracks of 1741two-prong events. Not only do the central portions of thedistributions support the conclusion that the majority of thetracks have statistically equivalent measurements, but thesmall number of tracks having disagreements greater thanfour standard deviations indicates that almost invariablythe same tracks were associated with the events by DAPRas by HAZE. A study of the few discrepancies showed thatby far the most frequent cause for disagreement was a
difference in track length over which the measurement was
made. In these cases a small kink was often unknowinglyincluded-in either the DAPR or HAZE measurement. Thuswe find that the fidelity of the track association is as good in
DAPR as in HAZE. Although a few fake events were foundby the DAPR scanner, it was clear that most of these couldhave been excluded by more complete scanning instruc-tions.
Since completion of the test experiment, considerablework has been done to improve the fraction of events whichare output by the DAPR scanner. Remembering that only
INI-CH HWDR'OCEH CHArME:ER FAIR OIJTPUT_tH O'53-S5'9.-3 ['ATE 7 2 -1 9 ASHt *GP AA03LE'EL 1l4 HIST NO 12U6Q-, C.ELL -S S241 POINT3"
988-
912-
760-684-
6028-S32-456-
( 380-u 7.54-.u228-
E 152-76-
-6.0 -3.6 -1.2 1.2 3.6 6.0FLFE 4 0 - -
Fig. 9. Comparison of DAPR and HAZE measurements of track ele-vation angle shows excellent agreement between two systems. Indi-vidual track angle measurements were differenced and normalized bytheir stated errors.
5 IHCH HY'EIRI-GEHS CHAMEER FAIR OUTPUTFRNL*I'ri3 DATE 700219 ASN*GP AA03LE'..'EL 14 HIST HO 8U.LI CELLS 2-5241 POINTS
624-576-
528-480-
472-384-336-
288-o 240-w 192-U 144-
X 96-48-
-6a0 -3.6 -1.2 1.2 3.6 6.0BETE 4A 0 - -
Fig. 10. Comparison similar to Fig. 9, but of azimuth angle.
those events which can be reduced to unambiguous statuscan be handled by the DAPR scanning program, we rec-ognize that even though most vertices are found, some arenot in form to be edited to the output set. On the other hand,since their frame number and vertex location is known, ahighly satisfactory finding list for events to be manuallyreviewed exists. Present results with film of reasonablygood quality show that 80 percent ofthe vertices are writtenout in unambiguous form for final analysis.
993

IEEE TRANSACTIONS ON COMPUTERS, SEPTEMBER 1971
S ItHCH H'DROG3E1 CHAMEEFR FAIF OUTPLUTPFlltS !S-C'E DATE 7Qa'1 4 ASt!&.P AA,3LE'V.!EL G 4 HI-.T ri0 4Lit- C.ELLS !.2CC' .241 PF'QNTTS
871-
804-
737-
670-
603-
536-
469-
402-
3 3,5-
'J 268-LIJ 2 e- P,iw20±-
LE j34-
6?-
-6.000 -3.600 -±.200 ±.2 0
OPINJT 4R 0 -
Fig. 11. Comparison similar to Figs. 9 and 10,
of momentum.
3.600 6.000
but of measured value
I$I CH H'YDF'-DcGEt FCHAt1MBER FARFLATF,TFIT TRLIN 04911.3 DATE 'i A,-,tASH GPRACFAl 3
LE'V!EL AOF-'EI HIST H-Il 1U 4c' CELLS-; C'- 95r 4 F' IrAIITSCSTHC-M FOIR DAF'R ELA'T
143-
130-.
9ii-
7, So_ .--
39-
-.600 -200 .200 600 ±. 00
CSTHCM 3 A022-i - -
Fig. 12. Comparison of proton recoil angle in center of mass system forelastic events demonstrates lack of bias in DAPR finding process,
except for events having extremely small scattering angle. Dotted line-HAZE measurement, solid line-DAPR measurement. Central 37histogram cells (omitting two at left and one at right of distribution)were used for normalization and yield a chi-square value of 8.0 for a
20 degree-of-freedom fit.
The distribution of cos 0* (the recoil angle of the protontrack in the center ofmass system of elastic events) providesA further confirmation of the quality ofthe DAPR measure-
ment. This is shown in Fig. 12. The normalized HAZE dataareg represented by the dotted line, and the DAPR data bythe solid line. The depletion ofDAPR data in the first two
cells and in the last cell is due to the predicted bias from theas yet incomplete vertex algorithm and short stub pro-cedures of DAPR. When the data in the central 37 cellswere compared, a chi-square value of 8.0 was calculatedfor a 20-degree-of-freedom fit. Thus, except for predictablebiases, the DAPR measurements are seen to be in excellentagreement with the HAZE measurements.
EXPERIMENTAL USE OF DAPR
The DAPR system has been used for measurement ofexperimental physics data at the Lawrence RadiationLaboratory since February 1970. More than 50 000 picturesets have been measured. We are presently measuring in theDAPR mode a second set of 60 000 events, with measure-ments proceeding at the rate of about 15 000 per week.System capacity with our existing hardware should reach20 000 events per week for data from small chambers likethe LRL 25-in HBC, and will be further increased to30 000 per week with the completion of a tandem FSD unitwhich is now under construction. This means that a systemis now in operation which is capable ofmeasuring 1 000 000hydrogen bubble chamber events per year without anymanual assistance.We are continuing to develop some areas of the system
in the light of experience which has been gained from earlyresults. Three areas of track following need to be improved:the following of short tracks, the following of tracks inregions filled with beam tracks, and the earlier initializa-tion of tracks leaving the vertices. All of these needs havelong been evident, but it was felt that other parts of the sys-tem were more urgent. Similiarly, improvements are neededin track certification, so that better linking and partitioningprocedures can result in better data sets being presented tothe vertex recognition program. This latter needs improvedprocedures for separating close vertices and for associatingthe proper tracks with each.
THE FUTUREWe expect the use of HAZE to diminish in favor of
DAPR. HAZE has been used to measure several experi-ments ranging in volume from 100 000 to 500 000 events,and the future appears to portend even larger experimentsto be done entirely automatically with DAPR. Not only isthe saving in cost of the manual scanning significant, buteven more important, the great efforts required to coordi-nate and maintain consistent scanning of such large experi-ments by manual methods are prohibitive.As large chambers of the five-meter class come into use
within the next few years, we hope that experience which isbeing obtained with data from the current two-meter classwill lead to an easy transition. Because these new chamberswill use fish-eye lenses in contact with the liquid, theirimages will suffer severe optical distortions that will makemanual scanning extremely difficult, if not impossible.DAPR will not be bothered by these effects, although thelarge number of line elements produced by chamber fea-tures other than tracks may be a problem. If reasonableattention is given to clean operation of the chamber, we
994

IEEE TRANSACTIONS ON COMPUTERS, VOL. C-20, NO. 9, SEPTEMBER 1971
expect that DAPR's entirely automatic scanning processwill be the most satisfactory means offinding and measuringevents in this class of chambers.We view DAPR as a step toward the analysis of bubble
chamber data concurrently with the actual experiment.Presently, bubble chamber pictures are exposed at the rateof 4000 per hour, while their analysis proceeds many timesmore slowly. With the tandem FSD, DAPR will operatewithin a factor of 10-15 of this exposure rate using therelatively slow IBM 7094 computer. Given the develop-ment of suitable data acquisition hardware which can lookdirectly at the chamber and can digitize the information inreal time, several computers exist even now with centralprocessor speeds sufficient to perform the DAPR processin real-time synchronism with the chamber operation. Thusa DAT could replace the photographic film as the primarystore ofinformation from the experimental run. Concurrentanalysis would not only relieve the massive bottleneck indata analysis, but also could serve to feed back importantinformation useful in guiding the course of the experimentwhile it is still in process.We believe that entirely automatic feature extraction
has been achieved for bubble chamber data by the DAPRsystem. This process is already more economical than
manual systems. Furthermore, it is rapidly becoming moreeffective. The complete automation of this process opensnew vistas for bubble chamber experimentation.
ACKNOWLEDGMENTThe development ofDAPR has been truly the result ofthe
efforts of many people. D. Hall has made invaluable con-tributions to all parts of the DAPR system, and is primarilyresponsible for the design and implementation of the trackcertification, matching, and cleanup procedures. Pro-grammers Joan Franz, Barbara Britton, and Wen-Sue Geehave made the programs reliable and versatile tools forfeature extraction. The continued support of LRL DirectorE. McMillan has made this development possible.
REFERENCES[1] H. S. White, "Status of the LRL flying spot digitizer," in 1966 Proc.
Int. Conf. Instrumentation for High Energy Physics (Stanford, Calif.).Springfield, Va.: Clearinghouse for Federal Scientific and TechnicalInformation, NBS.
[2] P. V. C. Hough and B. W. Powell, "A method for faster analysis ofbubble chamber photographs," in 1960 Proc. Int. Conf. Instrumenta-tion for High Energy Physics (Berkeley, Calif.). New York: Inter-science, 1961.
[3] H. S. White and D. E. Hall, "Performance of the DAPR system," inProc. 10th Int. Co/i'f Data Handling Systems in High Energy Physics(Cambridge, England, March 1970), in press.
Global Transformations in PatternRecognition of Bubble Chamber
Photographs
PIERRE L. BASTIEN AND LAWRENCE A. DUNN
Abstract-In this paper we present some new ideas on patternrecognitiQrl of bubble chamber photographs. We have found globaltransformations that reduce circular tracks to a point in a two-dimensional angle-curvature space. The performance of this trackingmethod on a sample of bubble chamber events is presented andplanned irmprovements are discussed.
Index Terms-Angle-curvature space, bubble chamber photo-graphs, clustering techniques, global tracking, image processing,orthogonal transformations, pattern recognition.
Manuscript received January 4, 1971; revised April 12, 1971. This workwas supported by the National Science Foundation under Grant USDG,GU-2655. A preliminary version of this paper was presented at the IEEESymposium on Feature Extraction and Selection in Pattern Recognition,Argonne, Ill., October 5-7, 1970.
The authors are with the Visual Techniques Laboratory, Departmentof Physics, University of Washington, Seattle, Wash. 98105.
I. INTRODUCTIONUBBLE chambers have been used since 1954 to studyhigh-energy collisions. Millions of bubble chamberphotographs are being produced and analyzed
through various systems each year. Many systems are nowperforming well; however, one would like to further im-prove the speed and especially the efficiency with whichbubble chamber events can be extracted from film. The ulti-mate goal is to implement a practical, full pattern recogni-tion system.We present some new ideas on pattern recognition of
bubble chamber photographs. Global transformations areused on the raw data obtained by scanning the pictures witha CRT device. These transformations allow the extraction
995