Embed Size (px)
Citation preview

Finite Automata
Dr. Neil T. Dantam
CSCI-561, Colorado School of Mines
Fall 2017
Dantam (Mines CSCI-561) Finite Automata Fall 2017 1 / 35

Outline
Dantam (Mines CSCI-561) Finite Automata Fall 2017 2 / 35

Languages Review
Outline
Dantam (Mines CSCI-561) Finite Automata Fall 2017 3 / 35
Languages Review
Alphabets
Symbol: An abstract, primitive, atomic “thing”
I Examples: a, x, 4, θ, ℵ, !, ♥Set: An unordered collection, without repetition
Alphabet: A non-empty, finite set of symbols
I ΣB = {0, 1}I ΣE = {a, b, c , d , e, f , g , h, i , j , k, l ,m, n, o, p, q, r , s, t, u, v ,w , x , y , z}I ΣC = {♠,♥,♣,♦}
Dantam (Mines CSCI-561) Finite Automata Fall 2017 4 / 35
Languages Review
String
Sequence: An ordered list of objects
Example: (1, 2, 3, 5, 8, . . .)Abbreviated Notation: 12358 . . .Empty (zero-length) sequence: ε
String: A sequence over some alphabet
I ΓB = 101010I ΓE = helloI ΓC = ♣♥♦
Dantam (Mines CSCI-561) Finite Automata Fall 2017 5 / 35

Languages Review
Languages
Language: A set of strings
Examples: I Alternations of 0 and 1:{ε, 01, 10, 0101, 1010, 010101, 101010, . . .}
I 0s and 1s with no consecutive 1s:{ε, 0, 1, 00, 01, 10, 000, 001, 010, 100, 101, 0000, 0001, 0010, 0100, 0101, . . .}
Dantam (Mines CSCI-561) Finite Automata Fall 2017 6 / 35
Traffic Light Example
Outline
Dantam (Mines CSCI-561) Finite Automata Fall 2017 7 / 35
Traffic Light Example
Traffic Light Example
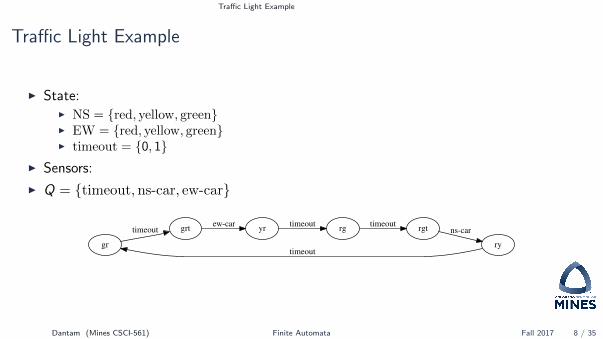
I State:I NS = {red, yellow, green}I EW = {red, yellow, green}I timeout = {0, 1}
I Sensors:
I Q = {timeout,ns-car, ew-car}
gr
grttimeout yrew-car
rgtimeout
rgttimeout
ry
ns-car
timeout
Dantam (Mines CSCI-561) Finite Automata Fall 2017 8 / 35
Traffic Light Example
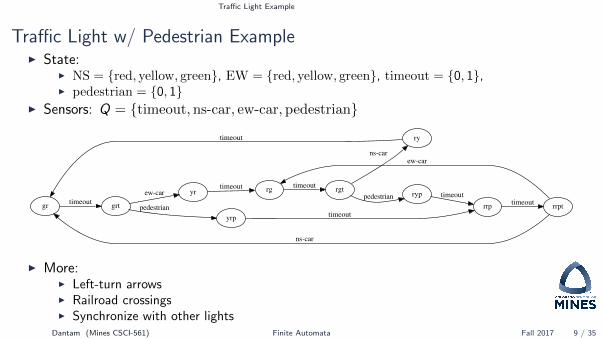
Traffic Light w/ Pedestrian ExampleI State:
I NS = {red, yellow, green}, EW = {red, yellow, green}, timeout = {0, 1},I pedestrian = {0, 1}
I Sensors: Q = {timeout, ns-car, ew-car,pedestrian}
gr grttimeout
yrew-car
yrp
pedestrian
rgtimeout rgttimeout
ry
ns-car
ryppedestrian
timeout
rrptimeout
rrpttimeout
timeout
ns-car
ew-car
I More:I Left-turn arrowsI Railroad crossingsI Synchronize with other lights
Dantam (Mines CSCI-561) Finite Automata Fall 2017 9 / 35

Traffic Light Example
Transition Table
gr
grttimeout yrew-car
rgtimeout
rgttimeout
ry
ns-car
timeout
state timeout ns-car ew-car
gr grt ∅ ∅grt ∅ ∅ yryr rg ∅ ∅rg rgt ∅ ∅rgt ∅ ry ∅ry gr ∅ ∅
/∗∗ SWITCH CASE ∗∗/e v e n t = n e x t e v e n t ( ) ;switch ( s t a t e ) {case GR :
switch ( e v e n t ) {case TIMEOUT: s t a t e = GRT;
break ;defau l t : s t a t e = DEAD;}/∗∗ . . . ∗∗/
}
/∗∗ LOOKUP TABLE ∗∗/e v e n t = n e x t e v e n t ( ) ;s t a t e = t a b l e [ s t a t e ] [ e v e n t ] ;
Dantam (Mines CSCI-561) Finite Automata Fall 2017 10 / 35

Deterministic Finite Automata
Outline
Dantam (Mines CSCI-561) Finite Automata Fall 2017 11 / 35
Deterministic Finite Automata
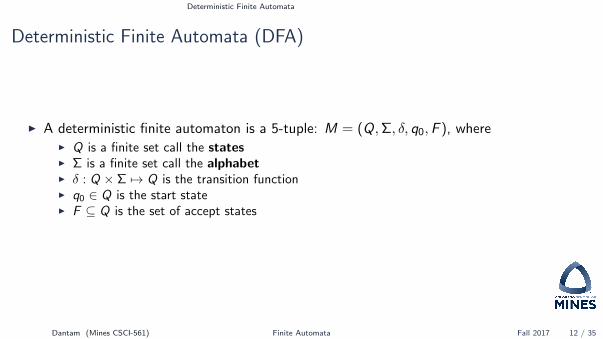
Deterministic Finite Automata (DFA)
I A deterministic finite automaton is a 5-tuple: M = (Q,Σ, δ, q0,F ), whereI Q is a finite set call the statesI Σ is a finite set call the alphabetI δ : Q × Σ 7→ Q is the transition functionI q0 ∈ Q is the start stateI F ⊆ Q is the set of accept states
Dantam (Mines CSCI-561) Finite Automata Fall 2017 12 / 35
Deterministic Finite Automata
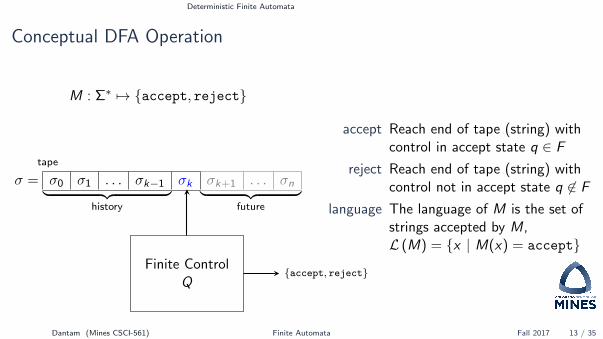
Conceptual DFA Operation
σ = σ0 σ1 . . . σk−1︸ ︷︷ ︸history
σk σk+1 . . . σn︸ ︷︷ ︸future
tape
Finite ControlQ
{accept, reject}
M : Σ∗ 7→ {accept, reject}
accept Reach end of tape (string) withcontrol in accept state q ∈ F
reject Reach end of tape (string) withcontrol not in accept state q 6∈ F
language The language of M is the set ofstrings accepted by M,L (M) = {x | M(x) = accept}
Dantam (Mines CSCI-561) Finite Automata Fall 2017 13 / 35
Deterministic Finite Automata
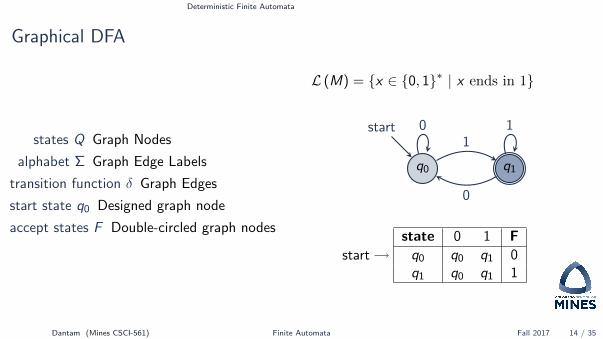
Graphical DFA
states Q Graph Nodes
alphabet Σ Graph Edge Labels
transition function δ Graph Edges
start state q0 Designed graph node
accept states F Double-circled graph nodes
L (M) = {x ∈ {0, 1}∗ | x ends in 1}
q0 q1
start 0 11
0
state 0 1 Fq0 q0 q1 0q1 q0 q1 1
start
Dantam (Mines CSCI-561) Finite Automata Fall 2017 14 / 35

Deterministic Finite Automata
Example: FA Design
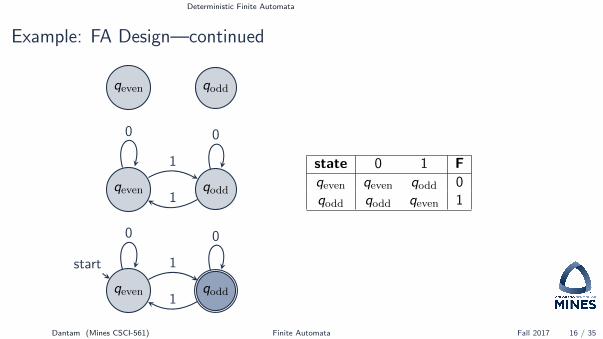
I L (M) ={w ∈ {0, 1}∗ | the number of 1s is odd}
I What state do we need to track?
I What are the state transitions?
I What are the start and accept states?
qeven qodd
qeven qodd
0 0
1
1
qeven qodd
start
0 0
1
1
Dantam (Mines CSCI-561) Finite Automata Fall 2017 15 / 35
Deterministic Finite Automata
Example: FA Design—continued
qeven qodd
qeven qodd
0 0
1
1
qeven qodd
start
0 0
1
1
state 0 1 Fqeven qeven qodd 0qodd qodd qeven 1
Dantam (Mines CSCI-561) Finite Automata Fall 2017 16 / 35
Deterministic Finite Automata
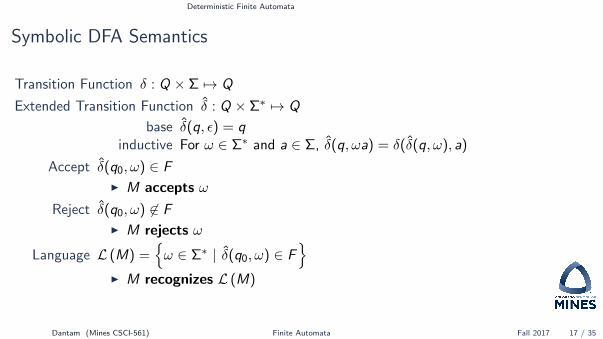
Symbolic DFA Semantics
Transition Function δ : Q × Σ 7→ Q
Extended Transition Function δ̂ : Q × Σ∗ 7→ Q
base δ̂(q, ε) = qinductive For ω ∈ Σ∗ and a ∈ Σ, δ̂(q, ωa) = δ(δ̂(q, ω), a)
Accept δ̂(q0, ω) ∈ F
I M accepts ω
Reject δ̂(q0, ω) 6∈ F
I M rejects ω
Language L (M) ={ω ∈ Σ∗ | δ̂(q0, ω) ∈ F
}I M recognizes L (M)
Dantam (Mines CSCI-561) Finite Automata Fall 2017 17 / 35
Deterministic Finite Automata
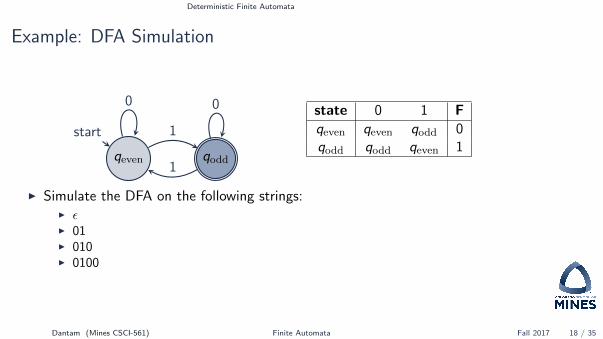
Example: DFA Simulation
qeven qodd
start
0 0
1
1
state 0 1 Fqeven qeven qodd 0qodd qodd qeven 1
I Simulate the DFA on the following strings:I εI 01I 010I 0100
Dantam (Mines CSCI-561) Finite Automata Fall 2017 18 / 35
Deterministic Finite Automata
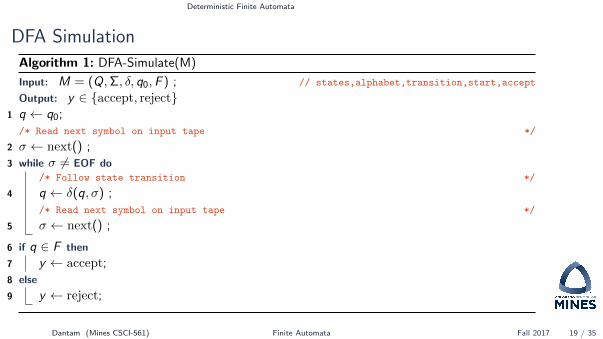
DFA Simulation
Algorithm 1: DFA-Simulate(M)
Input: M = (Q,Σ, δ, q0,F ) ; // states,alphabet,transition,start,accept
Output: y ∈ {accept, reject}1 q ← q0;
/* Read next symbol on input tape */
2 σ ← next() ;3 while σ 6= EOF do
/* Follow state transition */
4 q ← δ(q, σ) ;/* Read next symbol on input tape */
5 σ ← next() ;
6 if q ∈ F then
7 y ← accept;8 else
9 y ← reject;
Dantam (Mines CSCI-561) Finite Automata Fall 2017 19 / 35
Deterministic Finite Automata
Regular Languages
I The regular set is the set of languages that can be recognized by DFAsI R = {L (M) | M is a DFA}
I A language is a regular language if some DFA accepts itI (L ∈ R) ⇐⇒ ∃M, (L = L (M))
I What languages are not regular?
Dantam (Mines CSCI-561) Finite Automata Fall 2017 20 / 35

Nondeterministic Finite Automata
Outline
Dantam (Mines CSCI-561) Finite Automata Fall 2017 21 / 35
Nondeterministic Finite Automata
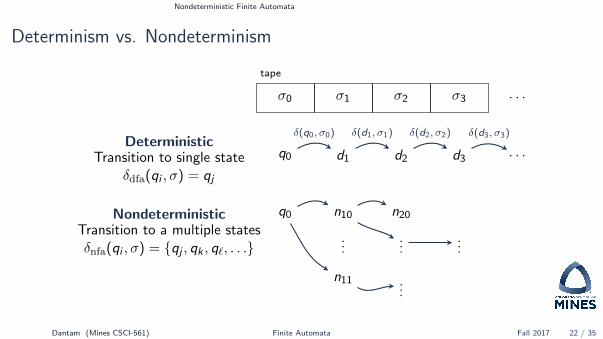
Determinism vs. Nondeterminism
σ0 σ1 σ2 σ3 . . .
tape
q0 d1 d2 d3. . .
δ(q0, σ0) δ(d1, σ1) δ(d2, σ2) δ(d3, σ3)
q0 n10
...
n11
n20
...
...
...
Deterministic
Nondeterministic
Transition to single stateδdfa(qi , σ) = qj
Transition to a multiple statesδnfa(qi , σ) = {qj , qk , q`, . . .}
Dantam (Mines CSCI-561) Finite Automata Fall 2017 22 / 35
Nondeterministic Finite Automata
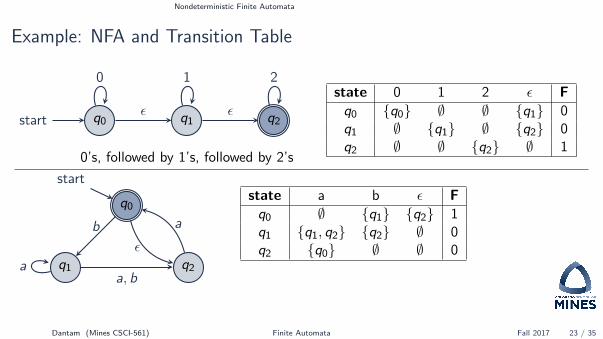
Example: NFA and Transition Table
q0 q1 q2startε ε
0 1 2
0’s, followed by 1’s, followed by 2’s
state 0 1 2 ε Fq0 {q0} ∅ ∅ {q1} 0q1 ∅ {q1} ∅ {q2} 0q2 ∅ ∅ {q2} ∅ 1
q0
q1 q2
start
b
aa, b
ε
a
state a b ε Fq0 ∅ {q1} {q2} 1q1 {q1, q2} {q2} ∅ 0q2 {q0} ∅ ∅ 0
Dantam (Mines CSCI-561) Finite Automata Fall 2017 23 / 35
Nondeterministic Finite Automata
Nondeterministic Finite Automata (NFA)
I A nondeterministic finite automaton is a 5-tuple: N = (Q,Σ, δ, q0,F ), whereI Q is a finite set call the statesI Σ is a finite set call the alphabetI δ : Q × Σ 7→ P (Q) is the transition functionI q0 ∈ Q is the start stateI F ⊆ Q is the set of accept states
Dantam (Mines CSCI-561) Finite Automata Fall 2017 24 / 35
Nondeterministic Finite Automata
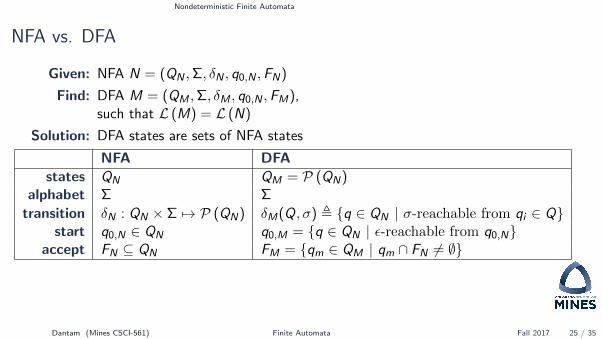
NFA vs. DFA
Given: NFA N = (QN ,Σ, δN , q0,N ,FN)
Find: DFA M = (QM ,Σ, δM , q0,N ,FM),such that L (M) = L (N)
Solution: DFA states are sets of NFA states
NFA DFAstates QN QM = P (QN)
alphabet Σ Σ
transition δN : QN × Σ 7→ P (QN) δM(Q, σ) , {q ∈ QN | σ-reachable from qi ∈ Q}start q0,N ∈ QN q0,M = {q ∈ QN | ε-reachable from q0,N}
accept FN ⊆ QN FM = {qm ∈ QM | qm ∩ FN 6= ∅}
Dantam (Mines CSCI-561) Finite Automata Fall 2017 25 / 35
Nondeterministic Finite Automata
Practical usage of DFAs vs. NFAs
I Today’s physical computers are deterministicI Options:
1. Simulate NFA by tracking all possible current states2. Convert NFA to DFA by constructing the subsets of NFA state set
I Which option is better?
Dantam (Mines CSCI-561) Finite Automata Fall 2017 26 / 35
Nondeterministic Finite Automata
NFA subset construction outines
ε–closure(q) States reachable from q on ε transitions
move-ε–closure(q, σ) States reachable from state q after reading symbol σ
Construct the reachable subsets of NFA states
Dantam (Mines CSCI-561) Finite Automata Fall 2017 27 / 35

Nondeterministic Finite Automata
ε-closure examples
q0 q1 q2startε ε
0 1 2
I ε-closure(q0) = {q0, q1, q2}I ε-closure(q1) = {q1, q2}I ε-closure(q2) = {q2}
q0
q1 q2
start
b
aa, b
ε
a I ε-closure(q0) = {q0, q2}I ε-closure(q1) = {q1}I ε-closure(q2) = {q2}
States reachable from initial state on only ε transitionsDantam (Mines CSCI-561) Finite Automata Fall 2017 28 / 35

Nondeterministic Finite Automata
ε–closure
Algorithm 2: ε-closure(NFA,S,C)
Input: NFA, S, C ; // NFA, unvisited states, initial closure
Output: C’ ; // final closure
/* visit: P (Q)× Q 7→ P (Q) */
1 Function visit(c,q) is
2 if q ∈ c then // base case
3 return c ;4 else // Recursive case
5 return ε−closure
NFA,
⋃
qε−→p∈NFA
p
︸ ︷︷ ︸ε-neighbors of q
,
{q} ∪ c︸ ︷︷ ︸add q to closure
;
6 C ′ ← fold-left(visit,C ,S) ;
Dantam (Mines CSCI-561) Finite Automata Fall 2017 29 / 35
Nondeterministic Finite Automata
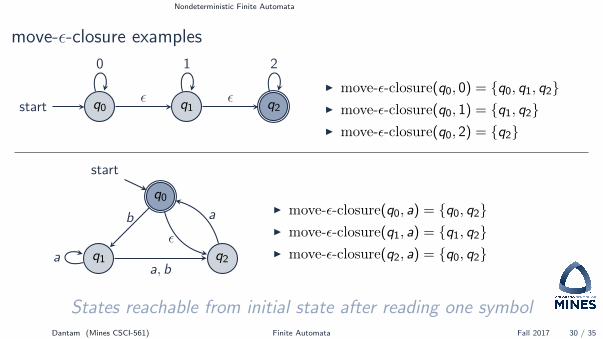
move-ε-closure examples
q0 q1 q2startε ε
0 1 2
I move-ε-closure(q0, 0) = {q0, q1, q2}I move-ε-closure(q0, 1) = {q1, q2}I move-ε-closure(q0, 2) = {q2}
q0
q1 q2
start
b
aa, b
ε
a I move-ε-closure(q0, a) = {q0, q2}I move-ε-closure(q1, a) = {q1, q2}I move-ε-closure(q2, a) = {q0, q2}
States reachable from initial state after reading one symbolDantam (Mines CSCI-561) Finite Automata Fall 2017 30 / 35
Nondeterministic Finite Automata
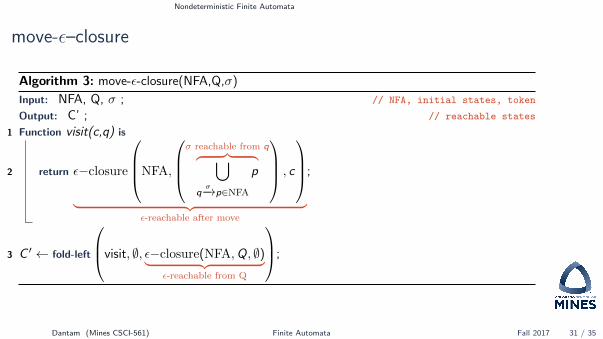
move-ε–closure
Algorithm 3: move-ε-closure(NFA,Q,σ)
Input: NFA, Q, σ ; // NFA, initial states, token
Output: C’ ; // reachable states
1 Function visit(c,q) is
2 return ε−closure
NFA,
σ reachable from q︷ ︸︸ ︷⋃
qσ−→p∈NFA
p
, c
︸ ︷︷ ︸
ε-reachable after move
;
3 C ′ ← fold-left
visit, ∅, ε−closure(NFA,Q, ∅)︸ ︷︷ ︸ε-reachable from Q
;
Dantam (Mines CSCI-561) Finite Automata Fall 2017 31 / 35
Nondeterministic Finite Automata
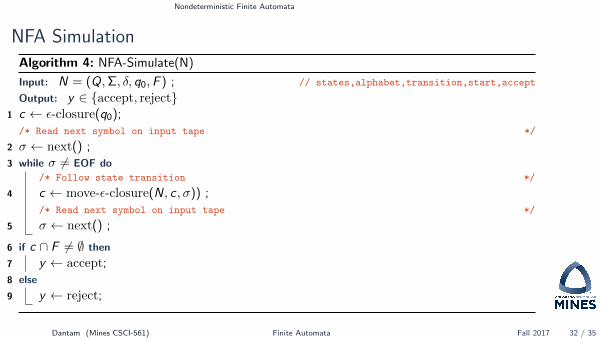
NFA Simulation
Algorithm 4: NFA-Simulate(N)
Input: N = (Q,Σ, δ, q0,F ) ; // states,alphabet,transition,start,accept
Output: y ∈ {accept, reject}1 c ← ε-closure(q0);
/* Read next symbol on input tape */
2 σ ← next() ;3 while σ 6= EOF do
/* Follow state transition */
4 c ← move-ε-closure(N, c , σ)) ;/* Read next symbol on input tape */
5 σ ← next() ;
6 if c ∩ F 6= ∅ then
7 y ← accept;8 else
9 y ← reject;
Dantam (Mines CSCI-561) Finite Automata Fall 2017 32 / 35
Nondeterministic Finite Automata
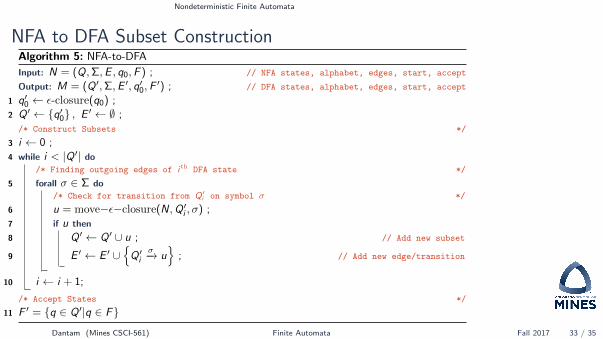
NFA to DFA Subset ConstructionAlgorithm 5: NFA-to-DFA
Input: N = (Q,Σ,E , q0,F ) ; // NFA states, alphabet, edges, start, accept
Output: M = (Q ′,Σ,E ′, q′0,F′) ; // DFA states, alphabet, edges, start, accept
1 q′0 ← ε-closure(q0) ;2 Q ′ ← {q′0} , E ′ ← ∅ ;
/* Construct Subsets */
3 i ← 0 ;4 while i < |Q ′| do
/* Finding outgoing edges of i th DFA state */
5 forall σ ∈ Σ do
/* Check for transition from Q ′i on symbol σ */
6 u = move−ε−closure(N,Q ′i , σ) ;7 if u then
8 Q ′ ← Q ′ ∪ u ; // Add new subset
9 E ′ ← E ′ ∪{Q ′i
σ−→ u}
; // Add new edge/transition
10 i ← i + 1;
/* Accept States */
11 F ′ = {q ∈ Q ′|q ∈ F}
Dantam (Mines CSCI-561) Finite Automata Fall 2017 33 / 35
Nondeterministic Finite Automata
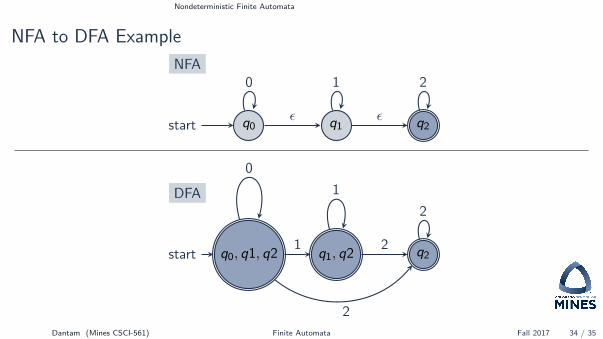
NFA to DFA Example
q0 q1 q2startε ε
0 1 2NFA
q0, q1, q2 q1, q2 q2start1 2
2
0
1
2DFA
Dantam (Mines CSCI-561) Finite Automata Fall 2017 34 / 35
Nondeterministic Finite Automata
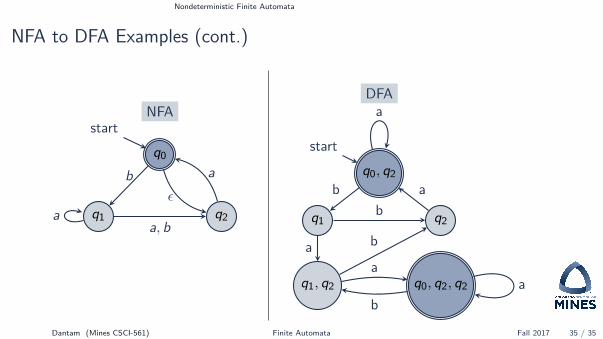
NFA to DFA Examples (cont.)
q0
q1 q2
start
b
aa, b
ε
a
NFA
q0, q2
q1 q2
q1, q2 q0, q2, q2
DFA
b
a
a
b
a b
aa
b
start
Dantam (Mines CSCI-561) Finite Automata Fall 2017 35 / 35