Embed Size (px)
Citation preview

Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
Flight Envelope Calculation of aHypersonic Vehicle Using a
First Principles-Derived Model17th AIAA International Space Planes and Hypersonic Systems and
Technologies Conference
Derek J. DalleUniversity of Michigan, Ann Arbor, MI 48109
Michael A. BolenderU.S. Air Force Research Laboratory, Ohio, 45433
Sean M. Torrez, James F. DriscollUniversity of Michigan, Ann Arbor, MI 48109
April 14, 2011
CCCS
Scramjet Flight Envelope, HYTASP 2011 1/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
Motivation
Control science
Can you create a nonlinearsystem that runs in about asecond on a desktop computerand has at least some, buthopefully most, of thecharacteristics of anair-breathing hypersonicvehicle?
Engine science
Can a simplified model be usedto get a better understanding ofengine-wide phenomena in away that helps us designdual-mode scramjet engines?
Do it without one of these
Kraken supercomputer, Oak Ridge National Laboratory,Oak Ridge, TN, Image credit: Daderot (Wikipedia user),public domain
CCCS
Scramjet Flight Envelope, HYTASP 2011 2/39

Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
Why dual-mode ram/scram again?
Competition
Space access: rocket
High-speed, long-range:rocket with glide
High-speed loiter: ?
Maximum practical Machnumber is about 12
We’ve all seen this one before.
Mach Number
Spe
cifi
c Im
puls
e [s
]
8,000
7,000
6,000
5,000
4,000
3,000
2,000
1,000
00 2 4 6 8 10
Turbofan
Turbofan with afterburner Ramjet
Scramjet
Rocket
Theoretical maximumHydrocarbon fuel in air
Theoretical maximumHydrogen fuel in air
For applications where we use lift, doubling the specific impulseis a big increase
Wide range of applications
Possibility of a large flight envelope
CCCS
Scramjet Flight Envelope, HYTASP 2011 3/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
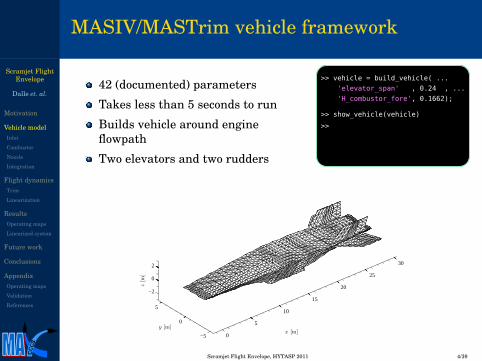
MASIV/MASTrim vehicle framework
42 (documented) parameters
Takes less than 5 seconds to run
Builds vehicle around engineflowpath
Two elevators and two rudders
>> vehicle = build_vehicle( ...
'elevator_span' , 0.24 , ...
'H_combustor_fore', 0.1662);
>> show_vehicle(vehicle)
>>
0
5
10
15
20
25
30
−5
0
5
−2
0
2
x [m]y [m]
z[m
]
CCCS
Scramjet Flight Envelope, HYTASP 2011 4/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
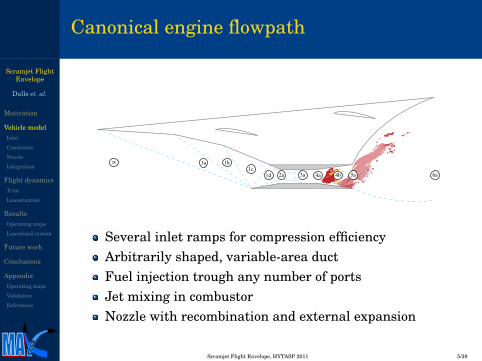
Canonical engine flowpath
8 1a 1b1c
1d 2a 3a 4a 4b 5a 6a
Several inlet ramps for compression efficiencyArbitrarily shaped, variable-area ductFuel injection trough any number of portsJet mixing in combustorNozzle with recombination and external expansion
CCCS
Scramjet Flight Envelope, HYTASP 2011 5/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
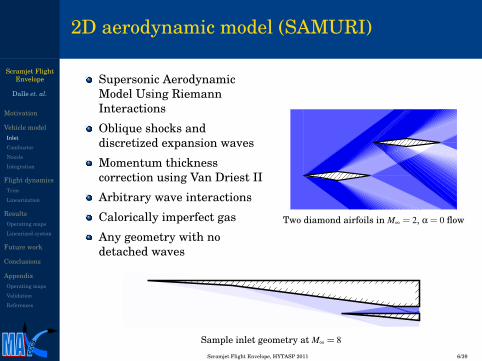
2D aerodynamic model (SAMURI)
Supersonic AerodynamicModel Using RiemannInteractions
Oblique shocks anddiscretized expansion waves
Momentum thicknesscorrection using Van Driest II
Arbitrary wave interactions
Calorically imperfect gas
Any geometry with nodetached waves
Two diamond airfoils in M∞ = 2, α = 0 flow
Sample inlet geometry at M∞ = 8
CCCS
Scramjet Flight Envelope, HYTASP 2011 6/39

Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
Riemann problem
Discontinuous regionscome in contact whenshocks intersectRegions B and C musthave the same pressureDensity and temperaturemay differFlow matches directionWaves separate regions Afrom B and D from CMain limiter of codeperformance
Zoom in on a generic flow
A
B
C
D
σA
βAθA
θB
θD
σC
σD
μC
μD
Sketch of two interacting waves.
CCCS
Scramjet Flight Envelope, HYTASP 2011 7/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
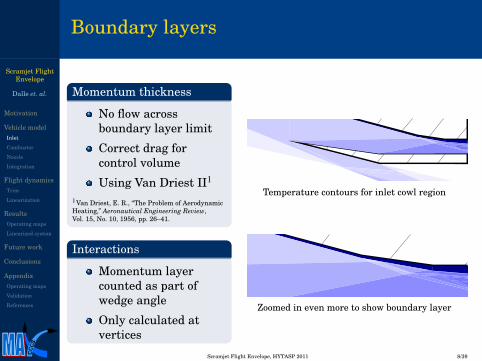
Boundary layers
Momentum thickness
No flow acrossboundary layer limit
Correct drag forcontrol volume
Using Van Driest II1
1Van Driest, E. R., “The Problem of AerodynamicHeating,” Aeronautical Engineering Review,Vol. 15, No. 10, 1956, pp. 26–41.
Interactions
Momentum layercounted as part ofwedge angle
Only calculated atvertices
Temperature contours for inlet cowl region
Zoomed in even more to show boundary layer
CCCS
Scramjet Flight Envelope, HYTASP 2011 8/39

Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
Comparison to CFD
Results from CFD++
Results from SAMURI
Darker colors represent higher pressures: maximum p/p∞ = 90
Maximum local error is about 6%Viscous CFD, no boundary layers in SAMURI
CCCS
Scramjet Flight Envelope, HYTASP 2011 9/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
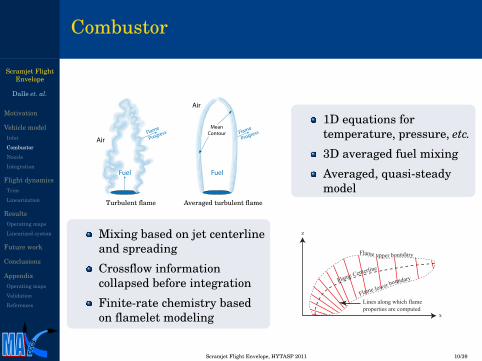
Combustor
Fuel
AirFlam
e
Progress
Fuel
Air
Flame
Progress
MeanContour
Turbulent flame Averaged turbulent flame
1D equations fortemperature, pressure, etc.
3D averaged fuel mixing
Averaged, quasi-steadymodel
Mixing based on jet centerlineand spreading
Crossflow informationcollapsed before integration
Finite-rate chemistry basedon flamelet modeling
Lines along which flameproperties are computed
z
x
Flame lower boundaryFlame Centerline
Flame upper boundary
CCCS
Scramjet Flight Envelope, HYTASP 2011 10/39

Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
Nozzle modelAlmost the same as the inlet
Results from CFD++
1200
700
200
400
400
Results from fundamental model
Pressure contours
This comparison included finite-rate chemistry
CFD model included viscosity
CCCS
Scramjet Flight Envelope, HYTASP 2011 11/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
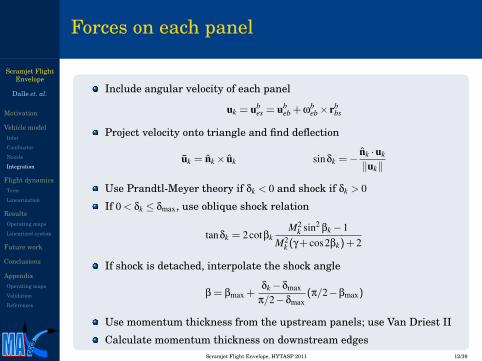
Forces on each panel
Include angular velocity of each panel
uk = ubes = ub
eb + ωbeb× rb
bs
Project velocity onto triangle and find deflection
uk = nk× uk sinδk =− nk ·uk
‖uk‖
Use Prandtl-Meyer theory if δk < 0 and shock if δk > 0
If 0 < δk ≤ δmax, use oblique shock relation
tanδk = 2cotβkM2
k sin2βk−1
M2k (γ + cos2βk) + 2
If shock is detached, interpolate the shock angle
β = βmax +δk−δmax
π/2−δmax(π/2−βmax)
Use momentum thickness from the upstream panels; use Van Driest II
Calculate momentum thickness on downstream edges
CCCS
Scramjet Flight Envelope, HYTASP 2011 12/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
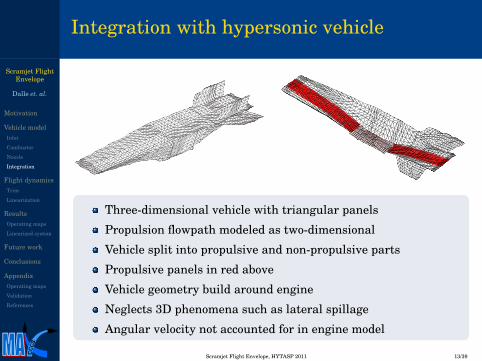
Integration with hypersonic vehicle
Three-dimensional vehicle with triangular panels
Propulsion flowpath modeled as two-dimensional
Vehicle split into propulsive and non-propulsive parts
Propulsive panels in red above
Vehicle geometry build around engine
Neglects 3D phenomena such as lateral spillage
Angular velocity not accounted for in engine model
CCCS
Scramjet Flight Envelope, HYTASP 2011 13/39

Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
Earth model
prime meridian
equatorxe
ye
ze
xn yn
zn
Equations of motion
Rotating, ellipsoidal Earthdefault (WGS84)
Options for flat or sphericalEarth
Rotation can be turned on oroff independently
Submodels
Somigliana gravity model
1976 standard atmosphere
Optional temperature offset
Optional wind and windderivatives
CCCS
Scramjet Flight Envelope, HYTASP 2011 14/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
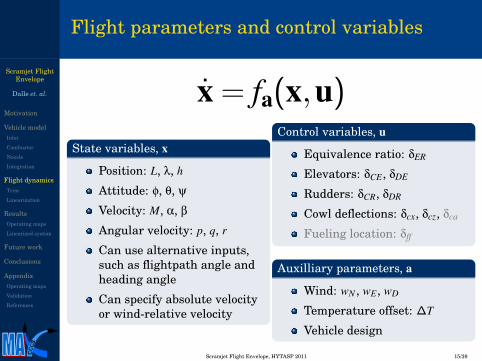
Flight parameters and control variables
x = fa(x,u)State variables, x
Position: L, λ, h
Attitude: φ, θ, ψ
Velocity: M, α, β
Angular velocity: p, q, r
Can use alternative inputs,such as flightpath angle andheading angle
Can specify absolute velocityor wind-relative velocity
Control variables, u
Equivalence ratio: δER
Elevators: δCE, δDE
Rudders: δCR, δDR
Cowl deflections: δcx, δcz, δca
Fueling location: δff
Auxilliary parameters, a
Wind: wN , wE, wD
Temperature offset: ∆T
Vehicle design
CCCS
Scramjet Flight Envelope, HYTASP 2011 15/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
Vehicle trim
Problem statement:
Find x and u such thatx = f(x,u)
where we pick the value of x beforehand. Usually we want x = 0.
Independent variables and dependent variables
We want to pick some of the state variables beforehand, but not all.
ξ = T1x υ =
[T2xu
]Now ξ has independent variables, and υ has dependent variables.
Implementation
Technically that’s only an equality constraint.
min φ(ξ,υ) subject to υ = g(ξ, x)
CCCS
Scramjet Flight Envelope, HYTASP 2011 16/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
Vehicle trim
Problem statement:
Find x and u such thatx = f(x,u)
where we pick the value of x beforehand. Usually we want x = 0.
Independent variables and dependent variables
We want to pick some of the state variables beforehand, but not all.
ξ = T1x υ =
[T2xu
]Now ξ has independent variables, and υ has dependent variables.
Implementation
Technically that’s only an equality constraint.
min φ(ξ,υ) subject to υ = g(ξ, x)
CCCS
Scramjet Flight Envelope, HYTASP 2011 16/39

Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
Vehicle trim
Problem statement:
Find x and u such thatx = f(x,u)
where we pick the value of x beforehand. Usually we want x = 0.
Independent variables and dependent variables
We want to pick some of the state variables beforehand, but not all.
ξ = T1x υ =
[T2xu
]Now ξ has independent variables, and υ has dependent variables.
Implementation
Solving for υ gives us a trim function.
υ = g(ξ, x)
Implementation
Technically that’s only an equality constraint.
min φ(ξ,υ) subject to υ = g(ξ, x)
CCCS
Scramjet Flight Envelope, HYTASP 2011 16/39

Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
Vehicle trim
Problem statement:
Find x and u such thatx = f(x,u)
where we pick the value of x beforehand. Usually we want x = 0.
Independent variables and dependent variables
We want to pick some of the state variables beforehand, but not all.
ξ = T1x υ =
[T2xu
]Now ξ has independent variables, and υ has dependent variables.
Implementation
Technically that’s only an equality constraint.
min φ(ξ,υ) subject to υ = g(ξ, x)
CCCS
Scramjet Flight Envelope, HYTASP 2011 16/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
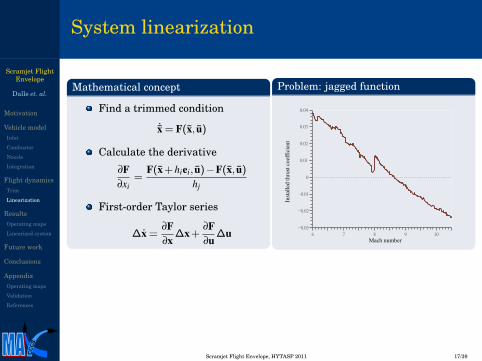
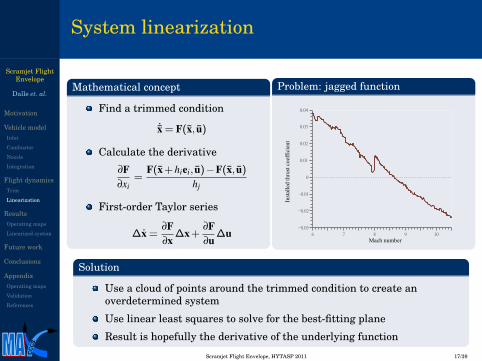
System linearization
Mathematical concept
Find a trimmed condition
˙x = F(x, u)
Calculate the derivative
∂F∂xi
=F(x + hiei, u)−F(x, u)
hj
First-order Taylor series
∆x =∂F∂x
∆x +∂F∂u
∆u
Problem: jagged function
6 7 8 9 10−0.03
−0.02
−0.01
0
0.01
0.02
0.03
0.04
Mach number
Inst
alle
d th
rust
coe
ffic
ient
Solution
Use a cloud of points around the trimmed condition to create anoverdetermined system
Use linear least squares to solve for the best-fitting plane
Result is hopefully the derivative of the underlying function
CCCS
Scramjet Flight Envelope, HYTASP 2011 17/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
System linearization
Mathematical concept
Find a trimmed condition
˙x = F(x, u)
Calculate the derivative
∂F∂xi
=F(x + hiei, u)−F(x, u)
hj
First-order Taylor series
∆x =∂F∂x
∆x +∂F∂u
∆u
Problem: jagged function
6 7 8 9 10−0.03
−0.02
−0.01
0
0.01
0.02
0.03
0.04
Mach number
Inst
alle
d th
rust
coe
ffic
ient
Solution
Use a cloud of points around the trimmed condition to create anoverdetermined system
Use linear least squares to solve for the best-fitting plane
Result is hopefully the derivative of the underlying function
CCCS
Scramjet Flight Envelope, HYTASP 2011 17/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
System linearization
Mathematical concept
Find a trimmed condition
˙x = F(x, u)
Calculate the derivative
∂F∂xi
=F(x + hiei, u)−F(x, u)
hj
First-order Taylor series
∆x =∂F∂x
∆x +∂F∂u
∆u
Problem: jagged function
6 7 8 9 10−0.03
−0.02
−0.01
0
0.01
0.02
0.03
0.04
Mach number
Inst
alle
d th
rust
coe
ffic
ient
Solution
Use a cloud of points around the trimmed condition to create anoverdetermined system
Use linear least squares to solve for the best-fitting plane
Result is hopefully the derivative of the underlying function
CCCS
Scramjet Flight Envelope, HYTASP 2011 17/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
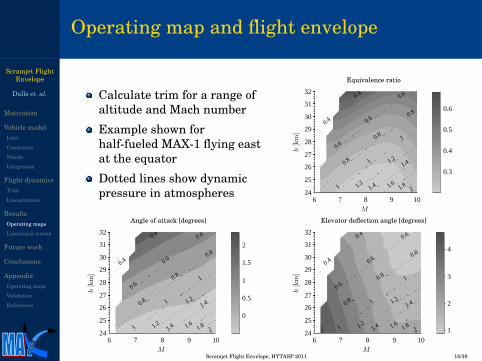
Operating map and flight envelope
Calculate trim for a range ofaltitude and Mach number
Example shown forhalf-fueled MAX-1 flying eastat the equator
Dotted lines show dynamicpressure in atmospheres
Equivalence ratio
0.4
0.4
0.6
0.6
0.6
0.8
0.8
0.8
1
1
1
1.2
1.2
1.4
1.4 1.6 1.8 2
M
h[km]
6 7 8 9 1024
25
26
27
28
29
30
31
32
0.3
0.4
0.5
0.6
Angle of attack [degrees]
0.4
0.4
0.6
0.6
0.6
0.8
0.8
0.8
1
1
1
1.2
1.2
1.4
1.4 1.6 1.8 2
M
h[km]
6 7 8 9 1024
25
26
27
28
29
30
31
32
0
0.5
1
1.5
2
Elevator deflection angle [degrees]
0.4
0.4
0.6
0.6
0.6
0.8
0.8
0.8
1
1
1
1.2
1.2
1.4
1.4 1.6 1.8 2
M
h[km]
6 7 8 9 1024
25
26
27
28
29
30
31
32
1
2
3
4
CCCS
Scramjet Flight Envelope, HYTASP 2011 18/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
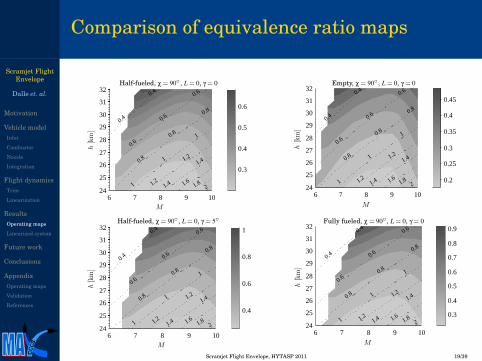
Comparison of equivalence ratio maps
Half-fueled, χ = 90◦ , L = 0, γ = 0
0.4
0.4
0.6
0.6
0.6
0.8
0.8
0.8
1
1
1
1.2
1.2
1.4
1.4 1.6 1.8 2
M
h[km]
6 7 8 9 1024
25
26
27
28
29
30
31
32
0.3
0.4
0.5
0.6
Half-fueled, χ = 90◦ , L = 0, γ = 5◦
0.4
0.4
0.6
0.6
0.6
0.8
0.8
0.8
1
1
1
1.2
1.2
1.4
1.4 1.6 1.8 2
M
h[km]
6 7 8 9 1024
25
26
27
28
29
30
31
32
0.4
0.6
0.8
1
Empty, χ = 90◦ , L = 0, γ = 0
0.4
0.4
0.6
0.6
0.6
0.8
0.8
0.8
1
1
1
1.2
1.2
1.4
1.4 1.6 1.8 2
M
h[km]
6 7 8 9 1024
25
26
27
28
29
30
31
32
0.2
0.25
0.3
0.35
0.4
0.45
Fully fueled, χ = 90◦ , L = 0, γ = 0
0.4
0.4
0.6
0.6
0.6
0.8
0.8
0.8
1
1
1
1.2
1.2
1.4
1.4 1.6 1.8 2
M
h[km]
6 7 8 9 1024
25
26
27
28
29
30
31
32
0.3
0.4
0.5
0.6
0.7
0.8
0.9
CCCS
Scramjet Flight Envelope, HYTASP 2011 19/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
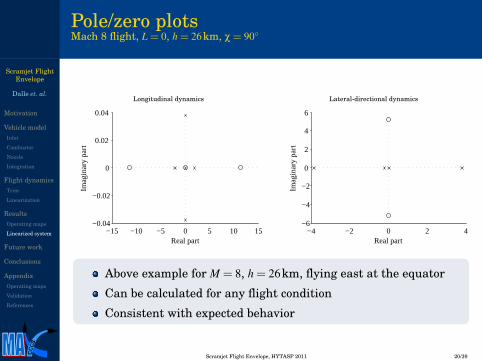
Pole/zero plotsMach 8 flight, L = 0, h = 26km, χ = 90◦
Longitudinal dynamics
−15 −10 −5 0 5 10 15−0.04
−0.02
0
0.02
0.04
Real part
Imag
inar
y pa
rt
Lateral-directional dynamics
−4 −2 0 2 4−6
−4
−2
0
2
4
6
Real part
Imag
inar
y pa
rt
Above example for M = 8, h = 26km, flying east at the equator
Can be calculated for any flight condition
Consistent with expected behavior
CCCS
Scramjet Flight Envelope, HYTASP 2011 20/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
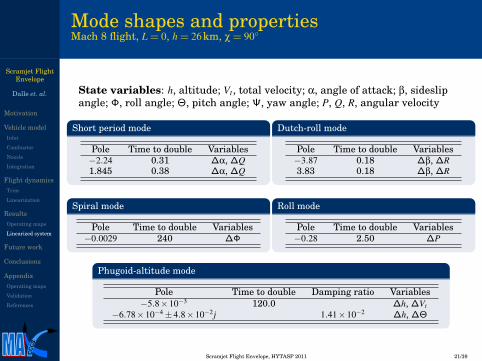
Mode shapes and propertiesMach 8 flight, L = 0, h = 26km, χ = 90◦
State variables: h, altitude; Vt, total velocity; α, angle of attack; β, sideslipangle; Φ, roll angle; Θ, pitch angle; Ψ, yaw angle; P, Q, R, angular velocity
Short period mode
Pole Time to double Variables−2.24 0.31 ∆α, ∆Q1.845 0.38 ∆α, ∆Q
Spiral mode
Pole Time to double Variables−0.0029 240 ∆Φ
Dutch-roll mode
Pole Time to double Variables−3.87 0.18 ∆β, ∆R3.83 0.18 ∆β, ∆R
Roll mode
Pole Time to double Variables−0.28 2.50 ∆P
Phugoid-altitude mode
Pole Time to double Damping ratio Variables−5.8×10−3 120.0 ∆h, ∆Vt
−6.78×10−4±4.8×10−2j 1.41×10−2 ∆h, ∆Θ
CCCS
Scramjet Flight Envelope, HYTASP 2011 21/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
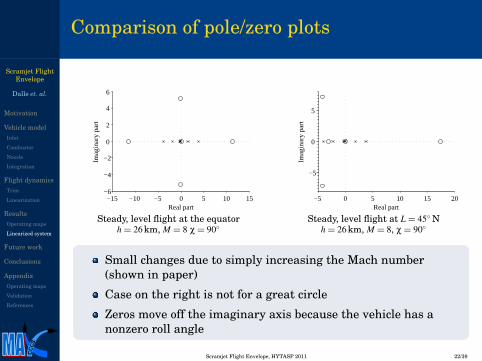
Comparison of pole/zero plots
−15 −10 −5 0 5 10 15−6
−4
−2
0
2
4
6
Real part
Imag
inar
y pa
rt
Steady, level flight at the equatorh = 26 km, M = 8 χ = 90◦
−5 0 5 10 15 20
−5
0
5
Real part
Imag
inar
y pa
rt
Steady, level flight at L = 45◦Nh = 26 km, M = 8, χ = 90◦
Small changes due to simply increasing the Mach number(shown in paper)
Case on the right is not for a great circle
Zeros move off the imaginary axis because the vehicle has anonzero roll angle
CCCS
Scramjet Flight Envelope, HYTASP 2011 22/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
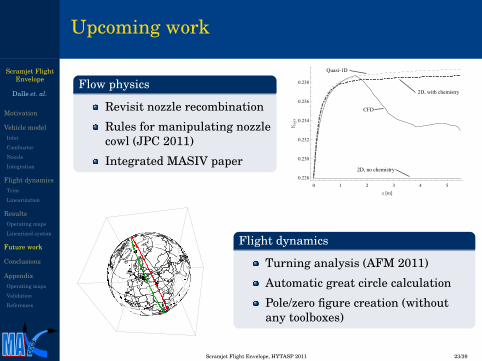
Upcoming work
Flow physics
Revisit nozzle recombination
Rules for manipulating nozzlecowl (JPC 2011)
Integrated MASIV paper
0 1 2 3 4 50.228
0.230
0.232
0.234
0.236
0.238
x [m]
Y H2O
Quasi-1D
CFD
2D, no chemistry
2D, with chemistry
Flight dynamics
Turning analysis (AFM 2011)
Automatic great circle calculation
Pole/zero figure creation (withoutany toolboxes)
CCCS
Scramjet Flight Envelope, HYTASP 2011 23/39

Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
Conclusions
Flight envelope
Approximately 1400 trimmedflight conditions
Initial estimation of operatingmap for altitude and Machnumber
Dynamics
Linearization about threeflight conditions
Stability and modal analysis
Rotating, ellipsoidal Earth
Does it mean anything?
Limited to medium fidelity for a limited class of vehicles
No proper upper bound on Mach number
Modeling physics directly gives some amount of predictive ability
Demonstrated ability to predict some non-obvious performance
CCCS
Scramjet Flight Envelope, HYTASP 2011 24/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
Acknowledgments
This research was supported by U.S. Air Force ResearchLaboratory grant FA 8650-07-2-3744 for the Michigan AirForce Research Laboratory Collaborative Center forControl Science.Approved for Public Release; Distribution Unlimited. CaseNumber 88ABW-2011-1250Nicolas LamorteScott G. V. FrendreisThis research was completed as part of theMichigan/AFRL Collaborative Center for Control Science
CCCS
Scramjet Flight Envelope, HYTASP 2011 25/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
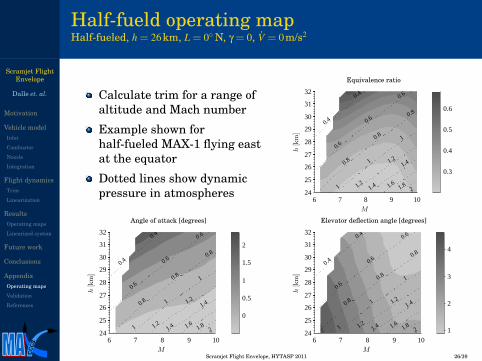
Half-fueld operating mapHalf-fueled, h = 26km, L = 0◦N, γ = 0, V = 0m/s2
Calculate trim for a range ofaltitude and Mach number
Example shown forhalf-fueled MAX-1 flying eastat the equator
Dotted lines show dynamicpressure in atmospheres
Equivalence ratio
0.4
0.4
0.6
0.6
0.6
0.8
0.8
0.8
1
1
1
1.2
1.2
1.4
1.4 1.6 1.8 2
M
h[km]
6 7 8 9 1024
25
26
27
28
29
30
31
32
0.3
0.4
0.5
0.6
Angle of attack [degrees]
0.4
0.4
0.6
0.6
0.6
0.8
0.8
0.8
1
1
1
1.2
1.2
1.4
1.4 1.6 1.8 2
M
h[km]
6 7 8 9 1024
25
26
27
28
29
30
31
32
0
0.5
1
1.5
2
Elevator deflection angle [degrees]
0.4
0.4
0.6
0.6
0.6
0.8
0.8
0.8
1
1
1
1.2
1.2
1.4
1.4 1.6 1.8 2
M
h[km]
6 7 8 9 1024
25
26
27
28
29
30
31
32
1
2
3
4
CCCS
Scramjet Flight Envelope, HYTASP 2011 26/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
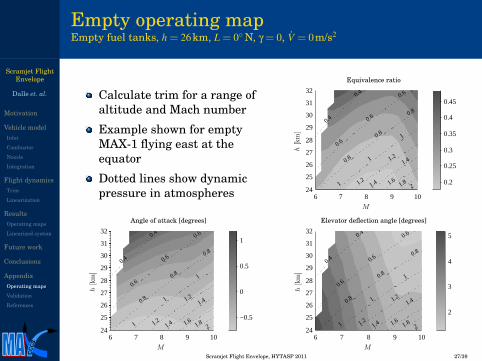
Empty operating mapEmpty fuel tanks, h = 26km, L = 0◦N, γ = 0, V = 0m/s2
Calculate trim for a range ofaltitude and Mach number
Example shown for emptyMAX-1 flying east at theequator
Dotted lines show dynamicpressure in atmospheres
Equivalence ratio
0.4
0.4
0.6
0.6
0.6
0.8
0.8
0.8
1
1
1
1.2
1.2
1.4
1.4 1.6 1.8 2
M
h[km]
6 7 8 9 1024
25
26
27
28
29
30
31
32
0.2
0.25
0.3
0.35
0.4
0.45
Angle of attack [degrees]
0.4
0.4
0.6
0.6
0.6
0.8
0.8
0.8
1
1
1
1.2
1.2
1.4
1.4 1.61.8
2
M
h[km]
6 7 8 9 1024
25
26
27
28
29
30
31
32
−0.5
0
0.5
1
Elevator deflection angle [degrees]
0.4
0.4
0.6
0.6
0.6
0.8
0.8
0.8
1
1
1
1.2
1.2
1.4
1.4 1.6 1.8 2
M
h[km]
6 7 8 9 1024
25
26
27
28
29
30
31
32
2
3
4
5
CCCS
Scramjet Flight Envelope, HYTASP 2011 27/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
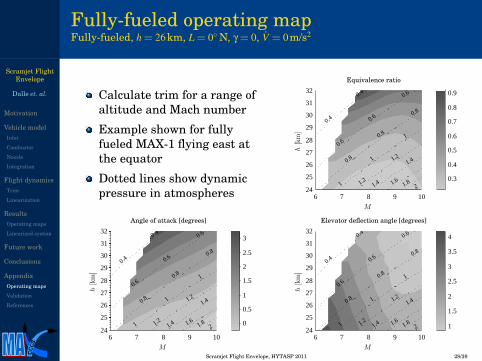
Fully-fueled operating mapFully-fueled, h = 26km, L = 0◦N, γ = 0, V = 0m/s2
Calculate trim for a range ofaltitude and Mach number
Example shown for fullyfueled MAX-1 flying east atthe equator
Dotted lines show dynamicpressure in atmospheres
Equivalence ratio
0.4
0.4
0.6
0.6
0.6
0.8
0.8
0.8
1
1
1
1.2
1.2
1.4
1.4 1.6 1.8 2
M
h[km]
6 7 8 9 1024
25
26
27
28
29
30
31
32
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Angle of attack [degrees]
0.4
0.4
0.6
0.6
0.6
0.8
0.8
0.8
1
1
1
1.2
1.2
1.4
1.4 1.6 1.8 2
M
h[km]
6 7 8 9 1024
25
26
27
28
29
30
31
32
0
0.5
1
1.5
2
2.5
3
Elevator deflection angle [degrees]
0.4
0.4
0.6
0.6
0.6
0.8
0.8
0.8
1
1
1
1.2
1.2
1.4
1.4 1.6 1.8 2
M
h[km]
6 7 8 9 1024
25
26
27
28
29
30
31
32
1
1.5
2
2.5
3
3.5
4
CCCS
Scramjet Flight Envelope, HYTASP 2011 28/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
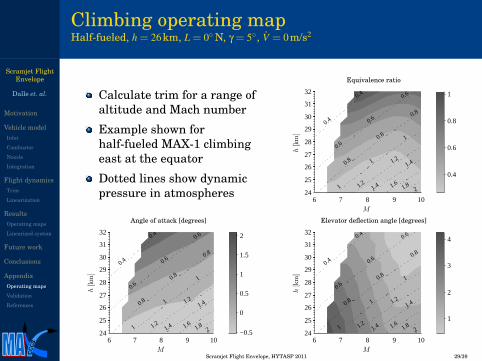
Climbing operating mapHalf-fueled, h = 26km, L = 0◦N, γ = 5◦, V = 0m/s2
Calculate trim for a range ofaltitude and Mach number
Example shown forhalf-fueled MAX-1 climbingeast at the equator
Dotted lines show dynamicpressure in atmospheres
Equivalence ratio
0.4
0.4
0.6
0.6
0.6
0.8
0.8
0.8
1
1
1
1.2
1.2
1.4
1.4 1.6 1.8 2
M
h[km]
6 7 8 9 1024
25
26
27
28
29
30
31
32
0.4
0.6
0.8
1
Angle of attack [degrees]
0.4
0.4
0.6
0.6
0.6
0.8
0.8
0.8
1
1
1
1.2
1.2
1.4
1.4 1.61.8
2
M
h[km]
6 7 8 9 1024
25
26
27
28
29
30
31
32
−0.5
0
0.5
1
1.5
2
Elevator deflection angle [degrees]
0.4
0.4
0.6
0.6
0.6
0.8
0.8
0.8
1
1
1
1.2
1.2
1.4
1.4 1.6 1.8 2
M
h[km]
6 7 8 9 1024
25
26
27
28
29
30
31
32
1
2
3
4
CCCS
Scramjet Flight Envelope, HYTASP 2011 29/39

Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
Turning operating mapHalf-fueled, h = 26km, L = 45◦N, γ = 0, V = 0m/s2
Calculate trim for a range ofaltitude and Mach number
Example shown forhalf-fueled MAX-1 flying eastat 45◦N
Dotted lines show dynamicpressure in atmospheres
Equivalence ratio
0.4
0.4
0.6
0.6
0.6
0.8
0.8
0.8
1
1
1
1.2
1.2
1.4
1.4 1.6 1.8 2
M
h[km]
6 7 8 9 1024
25
26
27
28
29
30
31
32
0.3
0.4
0.5
0.6
Angle of attack [degrees]
0.4
0.4
0.6
0.6
0.6
0.8
0.8
0.8
1
1
1
1.2
1.2
1.4
1.4 1.6 1.8 2
M
h[km]
6 7 8 9 1024
25
26
27
28
29
30
31
32
0
0.5
1
1.5
2
Elevator deflection angle [degrees]
0.4
0.4
0.6
0.6
0.6
0.8
0.8
0.8
1
1
1
1.2
1.2
1.4
1.4 1.6 1.8 2
M
h[km]
6 7 8 9 1024
25
26
27
28
29
30
31
32
1
2
3
4
CCCS
Scramjet Flight Envelope, HYTASP 2011 30/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
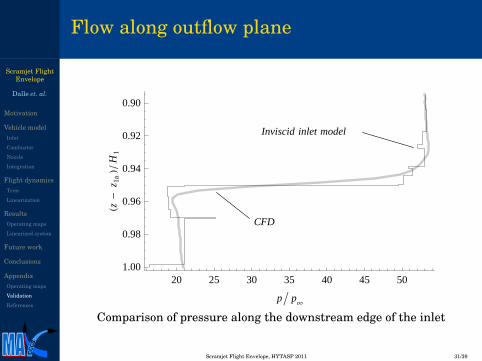
Flow along outflow plane
Inviscid inlet model
CFD
20 25 30 35 40 45 501.00
0.98
0.96
0.94
0.92
0.90
p � p¥
Hz -
z1a
L� H
1
Comparison of pressure along the downstream edge of the inlet
CCCS
Scramjet Flight Envelope, HYTASP 2011 31/39

Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
Experiment of Emami et. al.
Experimental apparatus schematica
aEmami, S., Trexler, C. A., Auslender, A. H., and Weidner, J. P., “Experimental Investigation of Inlet-Combustor Isolatorsfor a Dual-Mode Scramjet at a Mach Number of 4,” NASA Technical Paper 3502, May 1995
Inlet experiment, M∞ = 4.0
Movable cowl anglePressure taps along surfaceRelatively narrow inlet
CCCS
Scramjet Flight Envelope, HYTASP 2011 32/39

Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
Experiment of Emami et. al.
SAMURI solution for the Emami et. al.geometry with θcl = 6.5◦
DescriptionPrimary ramp angle is 11◦
Cowl angle range: 0◦ to 11◦
Three cowl lengthsAlso controls area ratioLength/width ratio 5.0
Coordinates
Surface LengthInlet ramp (horizontal) 24.816cmInlet ramp (vertical) 4.8260cmIsolator height 1.0160cmForward cowl length 11.176cmIsolator width 5.0800cm
CCCS
Scramjet Flight Envelope, HYTASP 2011 33/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
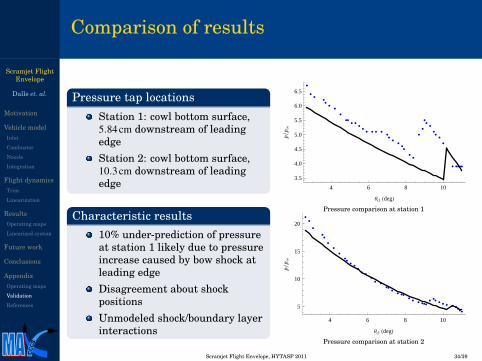
Comparison of results
Pressure tap locationsStation 1: cowl bottom surface,5.84cm downstream of leadingedgeStation 2: cowl bottom surface,10.3cm downstream of leadingedge
Characteristic results10% under-prediction of pressureat station 1 likely due to pressureincrease caused by bow shock atleading edgeDisagreement about shockpositionsUnmodeled shock/boundary layerinteractions
4 6 8 10
3.5
4.0
4.5
5.0
5.5
6.0
6.5
Θcl HdegL
p�p
¥
Pressure comparison at station 1
4 6 8 10
5
10
15
20
Θcl HdegL
p�p
¥
Pressure comparison at station 2
CCCS
Scramjet Flight Envelope, HYTASP 2011 34/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
ReferencesWorks by other authors (1/2)
1 Anon., “Department of Defense World Geodetic System 1984,” Tech. Rep.TR 8350.2, 3rd ed., National Imagery and Mapping Agency (now NGA),1997.
2 Broyden, C. G., “A Class of Methods for Solving Nonlinear SimultaneousEquations,” Mathematics of Computation, Vol. 19, No. 92, October 1965,pp. 577-593
3 Chavez, F. R. and Schmidt, D. K., “Analytical Aeropropulsive/AeroelasticHypersonic-Vehicle Model with Dynamic Analysis,” Journal of Guidance,Control, and Dynamics, Vol. 17, No. 6, 1994, pp. 1308–1319.
4 Chudoba, B. “Aircraft Volume and Mass Guidelines,” National Instituteof Aerospace, June 2008, Hypersonic Educational Initiative HypersonicVehicle System Integration Short Course.
5 Durham, B., “Aircraft Dynamics & Control,”<http://www.aoe.vt.edu/durhamAOE5214>, accessed March 3, 2011.
6 Frendreis, S. G. V. and Cesnik, C. E. S., “3D Simulation of a FlexibleHypersonic Vehicle,” Atmospheric Flight Mechanics Conference &Exhibit, 2010, AIAA Paper 2010-8229.
CCCS
Scramjet Flight Envelope, HYTASP 2011 35/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
ReferencesWorks by other authors (2/2)
7 Groves, P. D., Principles of GNSS, Inertial, and Multisensor IntegratedNavigations Systems, Artec House, 2008.
8 Hall, K. C., Thomas, J. P., and Dowell, E. H., “Proper OrthogonalDecomposition Technique for Transonic Unsteady Aerodynamic Flows,”AIAA Journal, Vol. 38, No. 10, 2000, pp. 1853–1862.
9 Savitzky, A. and Golay, M. J. E., “Smoothing and Differentiation of Databy Simplified Least Squares Procedures,” Analytical Chemistry, Vol. 36,No. 8, 1964, pp. 1627–1639.
10 Schöttle, U. M. and Hillesheimer, M., “Performance Optimization of anAirbreathing Launch Vehicle by a Sequential Trajectory Optimizationand Vehicle Design Scheme,” AIAA Guidance, Navigation, and ControlConference, 1991, AIAA Paper 91-2655.
11 Van Driest, E. R., “The Problem of Aerodynamic Heating,” AeronauticalEngineering Review, Vol. 15, No. 10, 1956, pp. 26–41.
12 White, F. M., Viscous Fluid Flow, McGraw-Hill, 3rd ed., 2006.13 Whittaker, S. E. and Robinson, G., The Calculus of Observations, Blackie
& Son, Limited, 1924.
CCCS
Scramjet Flight Envelope, HYTASP 2011 36/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
ReferencesWorks by the authors (1/3)
1 Bolender, M. A. and Doman, D. B., “Nonlinear Longitudinal DynamicalModel of an Air-Breathing Hypersonic Vehicle,” Journal of Spacecraftand Rockets, Vol. 44, No. 2, 2007, pp. 274–387.
2 Dalle, D. J., Fotia, M. L., and Driscoll, J. F., “Reduced-Order Modeling ofTwo-Dimensional Supersonic Flows with Applications to ScramjetInlets,” Journal of Propulsion and Power, Vol. 26, No. 3, 2010,pp. 545–555.
3 Dalle, D. J., Frendreis, S. G. V., Driscoll, J. F., and Cesnik, C. E. S.,“Hypersonic Vehicle Flight Dynamics with Copuled Aerodynamics andReduced-order Propulsive Models,” AIAA Atmospheric Flight MechanicsConference & Exhibit, 2010, AIAA Paper 2010-7930.
CCCS
Scramjet Flight Envelope, HYTASP 2011 37/39
Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
ReferencesWorks by the authors (2/3)
4 Parker, J. T., Serrani, A., Yurkovich, S., Bolender, M. A., and Doman, D.B., “Control-Oriented Modeling of an Air-Breathing Hypersonic Vehicle,”Journal of Guidance, Control, and Dynamics, Vol. 30, No. 3, 2007, pp.856–869.
5 Torrez, S. M., Driscoll, J. F., Dalle, D. J., Bolender, M. A., and Doman, D.B., “Hypersonic Vehicle Thrust Sensitivity to Angle of Attack and MachNumber,” AIAA Atmospheric Flight Mechanics Conference & Exhibit,2010, AIAA Paper 2010-7930.
6 Torrez, S. M., Driscoll, J. F., Dalle, D. J., and Fotia, M. L., “PreliminaryDesign Methodology for Hypersonic Engine Flowpaths,” 16thAIAA/DLR/DGLR International Space Plances and Hypersonic Systemsand Technologies Conference, 2009, AIAA Paper 2009-7289.
CCCS
Scramjet Flight Envelope, HYTASP 2011 38/39

Scramjet FlightEnvelope
Dalle et. al.
Motivation
Vehicle modelInlet
Combustor
Nozzle
Integration
Flight dynamicsTrim
Linearization
ResultsOperating maps
Linearized system
Future work
Conclusions
AppendixOperating maps
Validation
References
ReferencesWorks by the authors (3/3)
7 Torrez, S. M., Driscoll, J. F., Ihme, M., and Fotia, M. L., “Reduced-OrderModeling of Turbulent Reacting Flows with Aplication to Scramjets,”Journal of Propulsion and Power, 2011.
8 Dalle, D. J., Torrez, S. M., and Driscoll, J. F., “Reduced-Order Modeling ofReacting Supersonic Flows in Scramjet Nozzles,” 46thAIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit,2010.
9 Torrez, S. M., Dalle, D. J., and Driscoll, J. F. “Dual Mode Scramjet Designto Achieve Improved Operational Stability,” 46thAIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit,2010.
10 Torrez, S. M., Driscoll, J. F., Dalle, D. J., and Micka, D. J. “ScramjetEngine Model MASIV: Role of Mixing, Chemistry, and Wave Interaction.”45th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit,2009.
CCCS
Scramjet Flight Envelope, HYTASP 2011 39/39





























