Embed Size (px)
Citation preview

1
Forced Vibration of a Built-In Beam
Arnold Mukuvare
Group A1
Demonstrator: S. Mahabadi
SMOR: Dr N. Rockliff
Work carried out: April 24th
2013
Report completed: May 9th
2013
Abstract:
Forced vibration analysis is a very important phenomenon; these vibrations can give rise to a
lot of potential problems especially if the excitation force is periodic. The dynamic force can
either be externally applied or internally applied like the rotating machines. Oscillations can
be obtained from these vibrations and since all objects have a natural frequency which if the
forcing frequency reaches the system begins to oscillate with high amplitudes. The report is
taking the force to be a harmonic type ( ) Natural frequency results can be found in
many engineering tables but also can be determined experimentally or through calculations.
Theoretically it is shown in the report that the natural frequency is dependent on the Young’s
Modulus, length, breath, width and the total mass of that particular system. To investigate the
natural frequency a motor is used alongside with oscilloscopes to measure the circular
frequency and the amplitude relations. An error of 2.93% was obtained between the value of
the theoretical and experimental natural frequencies. Improvements could be made to this
experiment but the method proves to be a reliable way of predicting the value of the natural
frequency.
2
Contents
INTRODUCTION: ............................................................................................................................. 3
THEORY: ........................................................................................................................................... 3
PROCEDURES AND EQUIPMENT: ................................................................................................ 5
RESULTS: .......................................................................................................................................... 7
DISCUSSION: .................................................................................................................................... 9
CONCLUSION: ................................................................................................................................ 10
REFERENCES: ................................................................................................................................ 11
APPENDIX: ...................................................................................................................................... 12
3
INTRODUCTION:
One of the most common phenomena in engineering is the vibration of structures; there have
been many recorded failures of engineering systems as a result of not meeting excessive
vibration targets. In general if a dynamic system is acted upon by an applied external
harmonic force, the system begins to oscillate as a result. The oscillations can result in larger
amplitudes at certain frequency even at low periodic external forces. If the vibrations are such
that the frequency of the harmonic force is equal to the natural frequency of that particular
system then the system’s vibrations become excessive producing high amplitudes. This
phenomenon is known as resonance. The catastrophic collapse of the Tacoma Narrows
Bridge in 1940 shook engineers. At the time the most modern suspension bridge had failed as
a result of a light wind that caused the frequency of the vibrations to reach the bridge’s
natural frequency. On the day the bridge began to oscillate at exaggerated amplitudes and
collapsed.
Experimentally applying different frequencies to a system can give the natural frequency as
shown in figure (1). In this lab the frequency was found by using simple mass on a spring
analysis, changing the circular frequencies using a motor supported by a fixed beam.
Resonance can be obtained by the continued increase in the natural frequency which would
result in an increase in the amplitude from the oscillations.
It is worth noting that there are many several vibration types like (Free, Forced, Undamped
and Damped, Linear and Non-linear, and Deterministic and Random) vibrations. The
harmonic oscillations in this paper are induced by a periodic electric motor and are calculated
as Single Degree Of Freedom (SDOF).
THEORY:
The simplest system that can be used to demonstrate the steady state response of a single
degree of freedom oscillator is a mass on a spring system. (Nashif A.D., Jones D.I.G.,
Henderson J.P., 1985). An equation of motion can be considered in the analysis having
considered damping, acceleration and the spring constant. If a steady state harmonic
excitation is applied on the system would vibrate at amplitudes relating to the applied force’s
frequencies. Resonance will only be obtained only when the frequency from the excitation
force has reached the natural frequency of the system. The amplitudes of different forcing
frequencies can be decreased depending on the amount of damping that is available. The
presence of damping means that the maximum amplitude ratio occurs at a frequency lower
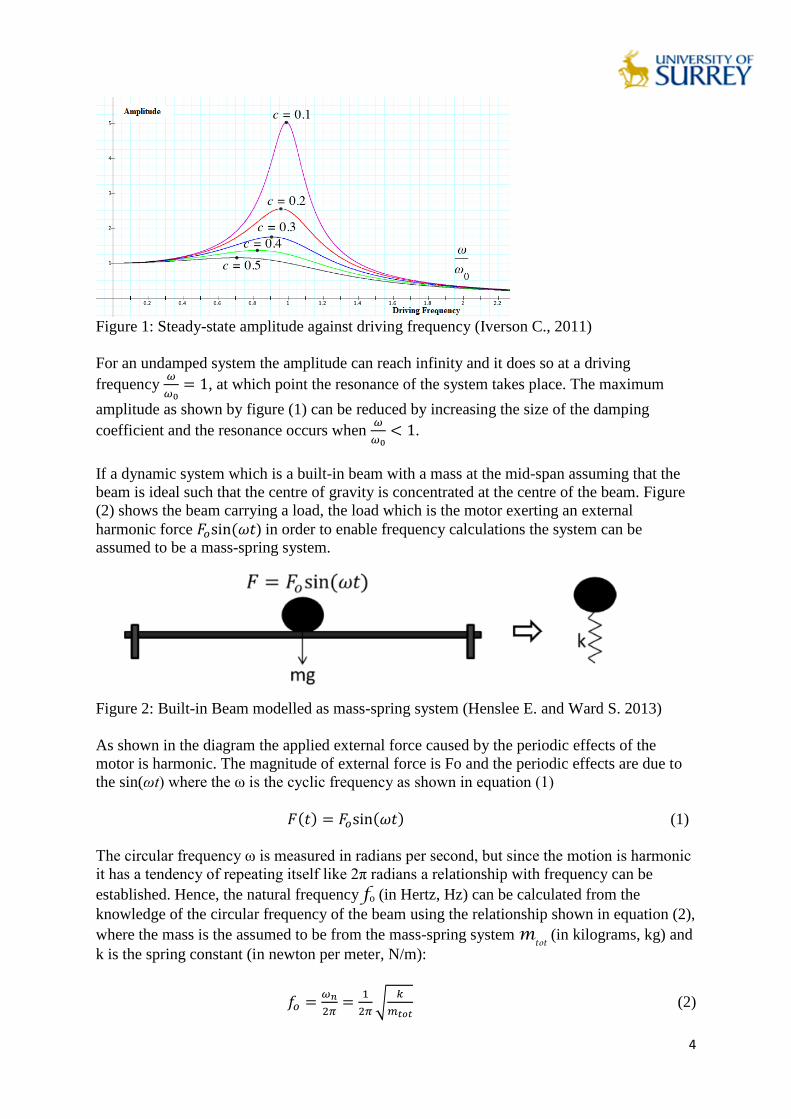
than the resonant frequency. Figure (1) shows the amplitude as a function of driving
frequency at different damping ratios ζ.
4
Figure 1: Steady-state amplitude against driving frequency (Iverson C., 2011)
For an undamped system the amplitude can reach infinity and it does so at a driving
frequency
, at which point the resonance of the system takes place. The maximum
amplitude as shown by figure (1) can be reduced by increasing the size of the damping
coefficient and the resonance occurs when
.
If a dynamic system which is a built-in beam with a mass at the mid-span assuming that the
beam is ideal such that the centre of gravity is concentrated at the centre of the beam. Figure
(2) shows the beam carrying a load, the load which is the motor exerting an external
harmonic force ( ) in order to enable frequency calculations the system can be
assumed to be a mass-spring system.
Figure 2: Built-in Beam modelled as mass-spring system (Henslee E. and Ward S. 2013)
As shown in the diagram the applied external force caused by the periodic effects of the
motor is harmonic. The magnitude of external force is Fo and the periodic effects are due to
the sin(ωt) where the ω is the cyclic frequency as shown in equation (1)
( ) ( ) (1)
The circular frequency ω is measured in radians per second, but since the motion is harmonic
it has a tendency of repeating itself like 2π radians a relationship with frequency can be
established. Hence, the natural frequency fo (in Hertz, Hz) can be calculated from the
knowledge of the circular frequency of the beam using the relationship shown in equation (2),
where the mass is the assumed to be from the mass-spring system mtot
(in kilograms, kg) and
k is the spring constant (in newton per meter, N/m):
√
(2)
5
The spring constant can be calculated using the length L, of the beam (measured in metres,
m), moment of inertia I (in metres raised to the fourth power, m4) and the Young’s modulus E
(in pascals, Pa) which is the material characteristic:
(3)
Moment of inertia is greatly affected by the cross section of the beam; meaning that if the
beam is circular, rectangular or any irregular shape will have a different moment of inertia
regardless the load is the same. This report however, is taking the cross section of the beam to
be rectangular which means that the inertia will rely on the breath b and width d (both in
meters, m):
(4)
Earlier it was mentioned that the system was an ideal mass-spring system which means that
the mass is a combination of the motor mmotor and the beam mbeam (both measured in
kilograms, kg):
(5)
The mass of the beam can be easily calculated from the relationship between mass, density
and volume. Where the volume is the determined from the length, width and breath:
(6)
Substituting equations (3, 4, 5, and 6) into equation (2), would give the natural frequency of
the beam:
√
( ) (7)
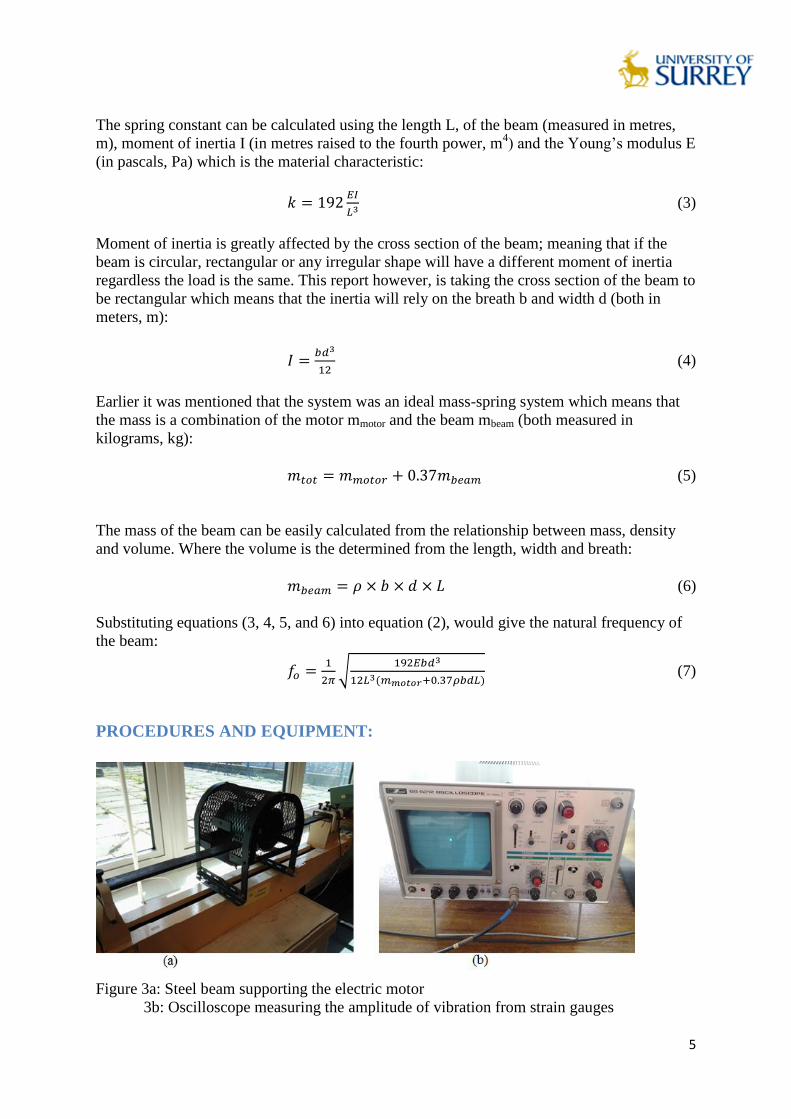
PROCEDURES AND EQUIPMENT:
Figure 3a: Steel beam supporting the electric motor
3b: Oscilloscope measuring the amplitude of vibration from strain gauges
6
Equipment
Frequency meter
Oscilloscope (which gave readings in revolutions per minute, rpm)
Rheostat
Steel beam clamped firmly at either end (with E=200GPa and ρ=7840kgm-3
)
Electric motor
Vernier calliper
Strain gauges
Procedures Before beginning the experiment, acquaintance with the instruments being used is important
as to limit the potential errors. Since the moment of inertia was not known the breath and
width was measured using a Vernier calliper. Ideal beams are not practical and as a result
many readings should be taken and an average calculated as is shown in the table (1).
Experiment 1:
Initial demonstrations were made by the demonstrator before the initial experiment readings
were taken. After the calibration the rheostat was slowly increased to the starting motor speed.
The oscilloscope and the frequency meter were to be taken at the same time so individuals
were tasked to specific tasks. The magnification factor of the oscilloscope was to be changed
when the peak of the wave on the display was reaching the maximum given peak. The motor
speed was adjusted until the starting frequency of 500rpm, the first four increments having to
be increased by 100rpm, followed by an increment of 50prm and further decrease in the
increment values as the frequency was tending towards the natural frequency of the beam the
lowest increment being 6rpm which was as we were approaching the theoretical natural
frequency as shown in table (2).
Once the natural frequency had been reached, the motor speed was reduced immediately to
avoid any accidents by turning the rheostat in a clockwise direction.
Experiment 2:
The second part of this lab the starting motor speed was adjusted to 1500rpm and this time
the motor speed was to be decreased. The decrements were initially 50rpm and made reduced
even further as the frequency of the motor was approaching the natural frequency of the bar.
This is a much quicker experiment that the first one, so greater care was taken on recording
the values. For each decrement the frequency, amplitude and magnification factor were
recorded as shown in table (3).
Both experiments were repeated to with greater care and the results recorded. Approximated
peaks were the frequency reached were carefully noted down and are shown in table (4)
7
RESULTS:
Table 1: Measurements of length, width and breath of the beam
1st 2nd 3rd 4th
5th
Average
Length (L)
±0.5mm
1115 1113 1114 - - 1114
Breath (b)
±0.01mm
50.18 50.08 50.02 50.10 50.08 50.09
Width (d)
±0.01mm
12.20 12.36 12.12 12.20 12.06 12.19
To calculate the moment of inertia of the beam the width and breath are substituted into
equation (4), where the width d is the smallest quantity, this is done when calculating the
moment of inertia to save as a safety minimal limit.
( )( )
The mass of the beam can be calculated using equation (6), since the quantities of the length;
breath and width have already been recorded. Mass of the beam will allow the calculation of
the theoretical frequency.
Table 2: Frequency-amplitude of first and repeated experiment of case 1
Where the frequency (f) and amplitude (δ)
Using the information in the table (2), the amplitude against frequency of experiment (1:a) is
plotted in figure (4). The results show an asymptotic curve that approaches a point of
Experiment (1:a) Experiment (1:b)
f±1rpm δ±0.01mm f±1rpm δ±0.01mm
500 0.052 500 0.048
600 0.096 600 0.064
700 0.275 700 0.072
800 0.5 800 0.09
850 0.525 850 0.1
900 0.55 900 0.3
950 1.3 950 0.45
1000 2 1000 0.65
1030 2.4 1050 1.4
1060 2.8 1100 2.4
1090 8.8 1125 3.1
1120 13 1135 5
1150 51 1145 12
1160 130 1155 18
1165 210 1165 22
1170 440 1175 100
1176 960 1184 400
8
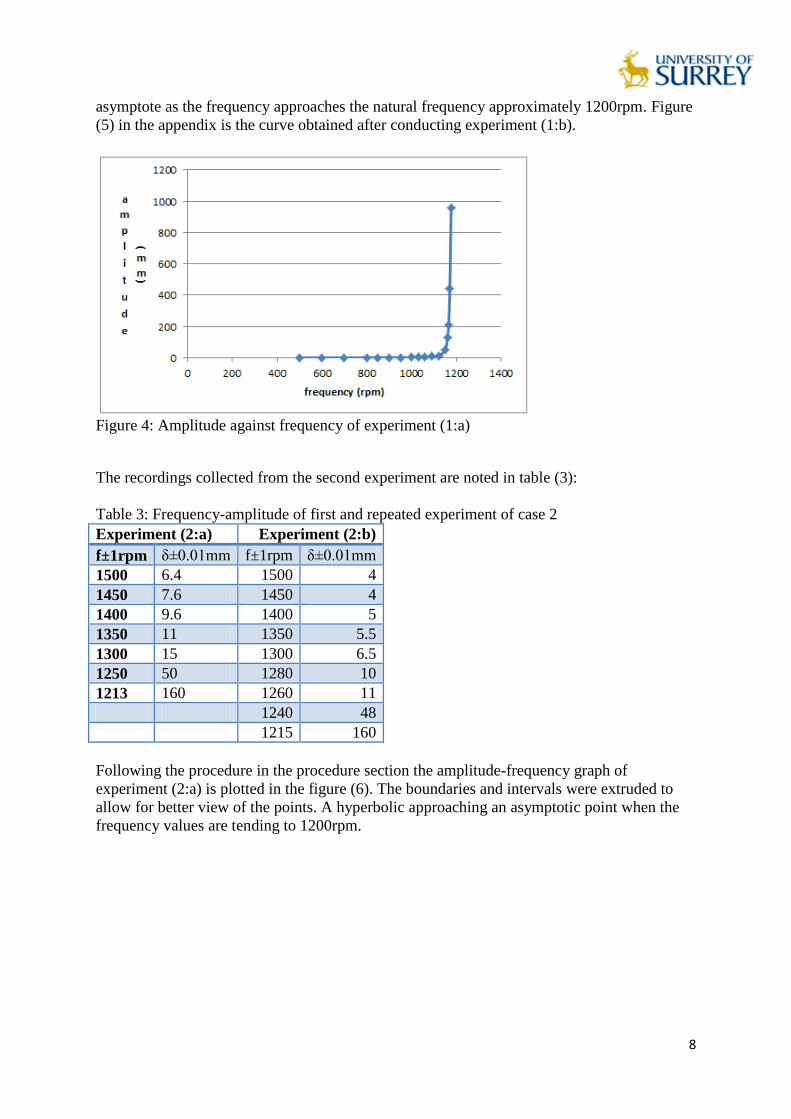
asymptote as the frequency approaches the natural frequency approximately 1200rpm. Figure
(5) in the appendix is the curve obtained after conducting experiment (1:b).
Figure 4: Amplitude against frequency of experiment (1:a)
The recordings collected from the second experiment are noted in table (3):
Table 3: Frequency-amplitude of first and repeated experiment of case 2
Experiment (2:a) Experiment (2:b)
f±1rpm δ±0.01mm f±1rpm δ±0.01mm
1500 6.4 1500 4
1450 7.6 1450 4
1400 9.6 1400 5
1350 11 1350 5.5
1300 15 1300 6.5
1250 50 1280 10
1213 160 1260 11
1240 48
1215 160
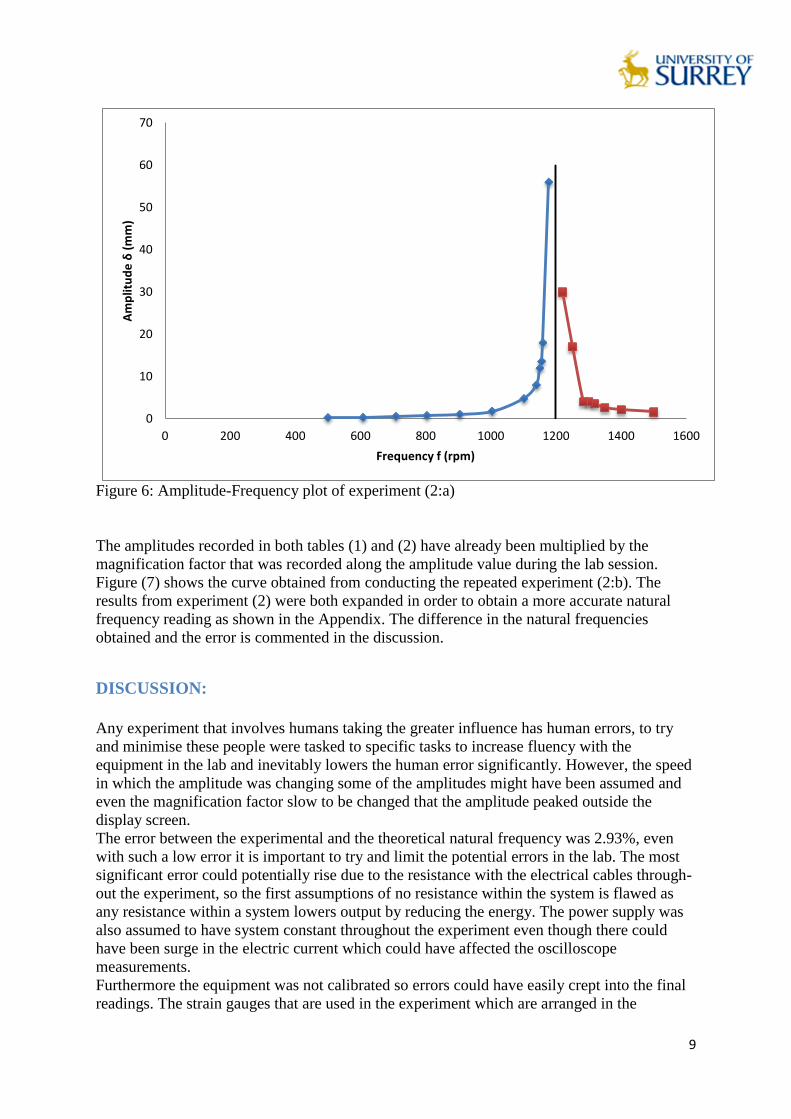
Following the procedure in the procedure section the amplitude-frequency graph of
experiment (2:a) is plotted in the figure (6). The boundaries and intervals were extruded to
allow for better view of the points. A hyperbolic approaching an asymptotic point when the
frequency values are tending to 1200rpm.
9
Figure 6: Amplitude-Frequency plot of experiment (2:a)
The amplitudes recorded in both tables (1) and (2) have already been multiplied by the
magnification factor that was recorded along the amplitude value during the lab session.
Figure (7) shows the curve obtained from conducting the repeated experiment (2:b). The
results from experiment (2) were both expanded in order to obtain a more accurate natural
frequency reading as shown in the Appendix. The difference in the natural frequencies
obtained and the error is commented in the discussion.
DISCUSSION:
Any experiment that involves humans taking the greater influence has human errors, to try
and minimise these people were tasked to specific tasks to increase fluency with the
equipment in the lab and inevitably lowers the human error significantly. However, the speed
in which the amplitude was changing some of the amplitudes might have been assumed and
even the magnification factor slow to be changed that the amplitude peaked outside the
display screen.
The error between the experimental and the theoretical natural frequency was 2.93%, even
with such a low error it is important to try and limit the potential errors in the lab. The most
significant error could potentially rise due to the resistance with the electrical cables through-
out the experiment, so the first assumptions of no resistance within the system is flawed as
any resistance within a system lowers output by reducing the energy. The power supply was
also assumed to have system constant throughout the experiment even though there could
have been surge in the electric current which could have affected the oscilloscope
measurements.
Furthermore the equipment was not calibrated so errors could have easily crept into the final
readings. The strain gauges that are used in the experiment which are arranged in the
0
10
20
30
40
50
60
70
0 200 400 600 800 1000 1200 1400 1600
Am
plit
ud
e δ
(m
m)
Frequency f (rpm)
10
Wheatstone bridge arrangement can measure different values in all of the resistors and
providing an error in the readings that are obtained. The temperature on the day rose steadily
and temperature can have a big effect on the material properties changing the ways in which
the atomic structures work due to excitement hence altering usual behaviours interestingly the
experiment considered that the temperature does not change and no reading were made
throughout the experiment. External forces vibrations were not considered this might have
had an additional effect to the external force.
The theoretical Young’s Modulus of the beam was not calculated and this can greatly affect
the final theoretical value also not determined was the density of the beam taking both
considerations into the theoretical calculations great differences might result in the final
theoretical value.
All the equipment in the experiment should be calibrated before the start of the experiment to
help obtain accurate values of and minimise the calibration error. A set power source that
supplies a steady current can also be used to eliminate the potential surge in the electric
current from the national grid. A computer can automatically receive the results and
simultaneously plotted, this would eliminate the human error caused by the delay.
Although there are many potential sources of errors as mentioned above, a low total
percentage error of 2.93% shows that the experiment is good way of finding the natural
frequency. This experiment is a very good way of finding the natural frequency and
improvement of the equipment can result in further reduction of the errors.
CONCLUSION:
The experiment was successful in obtaining the natural frequency of the beam with great
accuracy. Different beams with different Young’s modulus and lengths should be used to
validate the accuracy of our method. Also recording the room temperature before, during and
after the experiment should help improve the experiment. Ways of reducing the potential
errors in the lab have been discussed in the discussion section. The discussion section
outlines ways in which better results can be obtained.
11
REFERENCES:
[1] Rao S.S., 1990, Mechanical vibrations, Second Edition, Addison Wesley
[2] Steidel R.F Jr., 1979, An Introduction to Mechanical vibrations, Second Edition, John
Wiley and sons
[3] Thomson W.T., 1988, Theory of Vibration, Third Edition, Allen & Unwin
[4] Wahab M.A., 2008, Dynamics and Vibrations, An introduction, Revised First Edition,
John Wiley and sons
[5] Henslee. E. and Ward. S., 2013. Numerical and Experimental Methods: Background
Documents and Methods. University of Surrey
[6] Iverson C.. (11/01/11). Harmonically Driver Oscillators and Resonance. Available:
http://www.civerson.com/M275/pages/37.html. Last accessed 10th May 2015.
12
APPENDIX:
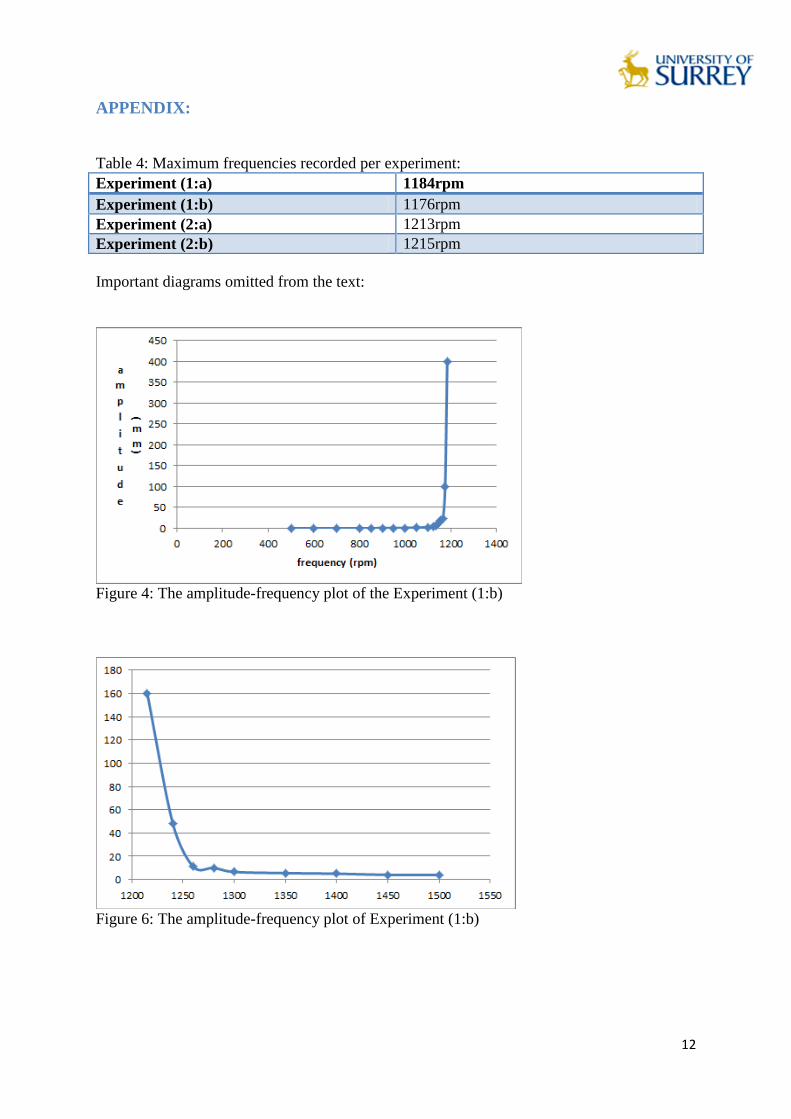
Table 4: Maximum frequencies recorded per experiment:
Experiment (1:a) 1184rpm
Experiment (1:b) 1176rpm
Experiment (2:a) 1213rpm
Experiment (2:b) 1215rpm
Important diagrams omitted from the text:
Figure 4: The amplitude-frequency plot of the Experiment (1:b)
Figure 6: The amplitude-frequency plot of Experiment (1:b)

13
Calculations:
Substituting the quantities into equation (3) the spring constant can be obtained:
( )
Therefore the total mass of the system:
( )
The theoretical frequency can be obtained since the spring constant and total mass has been
calculated. Substituting the values into the equation (2):
√
Then to convert the frequency to the revolutions per second:
( )
The average Experimental frequencies:
Errors:
Standard error of the experimental error:
( )
√ √
( )∑( ̅ )
The experimental natural frequency therefore is (1197±9.96) rpm





























