Embed Size (px)
Citation preview

Formación de imágenes ultrasónicas por Difracción de Tiempo de Vuelo (TOFD)A. Rodríguez, M. Hernández, E. Forero
25Intekhnia | Vol. 6 | No. 1| Enero - junio de 2011 | ISSN: 1900-7612 | pp. 25 - 34
Formación de imágenes ultrasónicas por Difracción de Tiempo de Vuelo (TOFD)
A. Rodríguez, M. Hernández, E. Forero
(Recibido: 28 de noviembre de 2010; aprobado: 31 de mayo de 2011)
rEsumEn
En el presente artículo se describen los progresos logrados en un sistema de ultrasonido diseñado para exploración de cor-dones de soldadura por medio de la técnica Time of Flight Diffraction (TOFD). Se mostrará el incremento en la rapidez de exploración al compararla con la lograda en trabajos previos. Con la aplicación realizada es posible generar una imagen D-Scan de forma casi inmediata, y para lograrlo se diseñó e implementó en Matlab un programa, con el que la tarea se re-duce a desplazar un arreglo de transductores sobre una trayectoria rectilínea paralela a la región que se desea examinar. Una vez almacenadas las señales, el programa se encarga de su respectiva alineación, y posteriormente construir con estas una imagen bidimensional, en la que se exhiben los perfiles de posibles discontinuidades embebidas en el cordón de soldadura..
Palabras clave - TOFD, barrido tipo A, barrido tipo D, ultrasonido, cordón de soldadura.
Alejandro Rodríguez Martínez: Físico, Especialista Universitario en Ingeniería de Telecomunicaciones, Máster en Ingeniería de Telecomunicaciones, [email protected]. Facultad de Ingeniería Electrónica, Universidad Santo Tomás, Bogotá., Carrera 9 No. 51 - 11 Bogotá, Colombia.
Miguel Hernández: [email protected]. Facultad de Ingeniería Electrónica, Universidad Santo Tomás, Carrera 9 No. 51 - 11 Bogotá.
Edwin Francisco Forero García: Ingeniero Eléctrico, Máster en Ingeniería Electrónica, [email protected], Facultad de Ingeniería Electró-nica, Universidad Santo Tomás, Carrera 9 No. 51 - 11 Bogotá.
El artículo es resultado del proyecto de investigación “Diseño y construcción de un sistema de ultrasonido para ensayos no destructivos”, desarrollado por el grupo Tecnologías Ultrasónicas y financiado por la Universidad Santo Tomás a través de la convocatoria interna de proyectos con recursos del Fondo de Investigaciones de la Universidad Santo Tomás (FODEIN- USTA).El objetivo del proyecto es evaluar y detectar discontinuidades en materiales sólidos, los cuales podrían menguar su resistencia y alterar negativamente las propiedades mecánicas.

26
Formación de imágenes ultrasónicas por Difracción de Tiempo de Vuelo (TOFD)A. Rodríguez, M. Hernández, E. Forero
Intekhnia | Vol. 6 | No. 1| Enero - junio de 2011 | ISSN: 1900-7612 | pp. 25 - 34
Ultrasonic Imaging Formation by Time of Flight TOFD Diffraction
The present paper describes the progress achieved in an ultrasound system designed to scan cord welds by means of the Time of Flight Diffraction technique TOFD. An increase in the speed of the exploration will be shown when comparing it to previous works.With the application made it is possible to generate a D-Scan image almost immediately. To achieve these images a program written in Matlab platform was designed and implemented, so that having this tool reduces compu-tational task to move an array of transducers on a straight path parallel to the region you want to examine. Once the signals are stored, the program designed handles their alignment and then builds with these a two-dimensional image in which the profiles of potential discontinuities embedded in the cord weld are displayed.
Keywords – TOFD, A-Scan, D-Scan, ultrasound, welds.
Formação de Imagem ultrasonicas por difracção de tempo de vôo TOFD
Nesta artigo se descreve os progresso alcançados em um sistema de ultrasonido projetado para exploração de soldas através da técnicaTime of Flight Diffraction TOFD . se mostrara o aumento na velocidade de exploração ao comparar a com estu-dos anteriores. Com o aplicação feita é possível gerar uma imagem de D-Scan, de maneira quase imediatamente, e para ser alcançado foi projetado e implementado em Matlab um programa que reduz a tarefa de mover um conjunto de transdutores em um caminho paralelo direto para a região que se deseja examinar. Uma vez armazenados os sinais, o programa cuida de seu alinhamento respectivo, e então construir com estas uma imagem bidimensional em a que se exibem os perfis de possíveis descontinuidades na solda.
Palavras-chave – TOFD, t varredura tipo A, varredura tipo B, ultra-sônico solda.

Formación de imágenes ultrasónicas por Difracción de Tiempo de Vuelo (TOFD)A. Rodríguez, M. Hernández, E. Forero
27Intekhnia | Vol. 6 | No. 1| Enero - junio de 2011 | ISSN: 1900-7612 | pp. 25 - 34
i. introducción
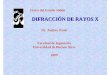
Los ensayos no destructivos permiten la evaluación de un cuerpo con miras a la detección en su interior de posibles discontinuidades, grietas u otros tipos de imperfecciones sin necesidad de alterar su integridad. Ahora bien, como se sabe, el ultrasonido es una perturbación elástica que se propaga en forma ondulatoria, de modo que cuando el campo acústico de la onda incidente interactúa con una discontinuidad aparece una serie de fenómenos secundarios tales como: reflexión, dispersión, transmisión y difrac-ción. La reflexión por ejemplo, constituye la base para la técnica de pulso-eco, consistente en que una onda elástica enviada por un transductor al interior de la muestra bajo estudio se refleja en una eventual falla, produciéndose de esta manera un eco que posteriormente es recogido por el mismo transductor. Aunque la citada metodología facilita la localización de fallas al interior del espécimen exami-nado, no permite diagnosticar las dimensiones de estas, lo que constituye una dificultad cuya solución subyace en la distorsión que experimenta un campo acústico más allá de las fallas; es decir, la difracción producida cuando la onda intenta rodear los bordes de una discontinuidad. Fue con base en esta propiedad de las ondas que en 1970, en el National NDT Centre de Inglaterra, un equipo encabezado por Maurice Silk propuso una metodología para la solución de ese crucial problema; esto es, determinar el tamaño de las discontinuidades utilizando ultrasonido. El fundamento físico que subyace al fenómeno de difracción es la diferencia entre el lapso de tiempo invertido por las ondas difractadas al recorrer distintas distancias detrás de los bordes de un defecto, lo cual exige dos transductores, uno que oficia como transmisor T del campo acústico y otro como receptor R del mismo (Figura 1).
Figura 1. Esquema que ilustra la interacción de una onda elástica con un defecto embebido en el cordón de soldadura
adicional a las trayectorias seguidas por las ondas difractadas, se muestran dos más; una que discurre paralela a la superficie de la probeta llamada onda lateral, y otra producto de la reflexión en la superficie inferior de la probeta, y denominada eco de fondo.
Fuente: Autores.
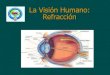
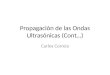
Los cuatro tipos de ondas que aparecen en la figura anterior ponen de manifiesto el amplio campo acústico de los trans-ductores utilizados con esta técnica denominada difracción de tiempo de vuelo(TOFD - Time of Flight Diffraction), y las señales correspondientes a las ondas recibidas por el transductor receptor se denominan A-Scan debido a que representan variaciones de la amplitud en función del tiempo. Al examinar una probeta con ausencia de defectos, la señal A-Scan muestreada y digitalizada no exhibe las ondas difractadas; por el contrario, si la probeta tuviese un defecto la señal A-Scan mostraría los cuatro tipos de ondas: la lateral, las difractadas tanto por el borde inferior y superior del defecto y el eco de fondo Figuras 2 y 3).
Figura 2. A-Scan procedente de la región dentro de un cordón de soldadura libre de discontinuidades
Fuente: Autores.
T R
Onda difractada por el borde inferior del defecto.
Onda difractada por el borde superior del defecto.
Defecto o discontinuidad
Sección transversal de probeta bajo estudio
Cordón de soldadura

28
Formación de imágenes ultrasónicas por Difracción de Tiempo de Vuelo (TOFD)A. Rodríguez, M. Hernández, E. Forero
Intekhnia | Vol. 6 | No. 1| Enero - junio de 2011 | ISSN: 1900-7612 | pp. 25 - 34
Figura 3. Típica forma de la señal A-Scan cuando el campo acústico del emisor interactúa con una falla
Fuente: Autores.
Con base en trabajos llevados a cabo por el grupo, en anteriores artículos se han presentado los fundamentos de los ensayos no destructivos con ultrasonido ENDU [1], el diseño y montaje de un sistema de ultrasonido para ensayos no destructivos [2] [3] y el procesamiento digital de señales TOFD [4] [5]. La dificultad inherente a las investigaciones que los gestaron radicaba en la lentitud para llevar a cabo tales ensayos. Consideraciones de versatilidad, rapidez y utilidad práctica, condujeron a la implementación de refor-mas al sistema inicial en términos de software y algoritmos de procesamiento [6] [7] [8] [9] [10], logrando con ello sustanciales cambios en la metodología para la adquis-ición, almacenamiento y presentación de los resultados de exploraciones con la técnica de Difracción de Tiempo de Vuelo (TOFD).
La organización del presente artículo será la siguiente. La sección inicial se dividirá en dos partes: en la primera parte se detalla la metodología inicialmente utilizada para el proceso de obtención de la información; y en la segunda, se muestra una alternativa novedosa para llevar a cabo el mismo proceso. Posteriormente, una tercera parte constituye una breve descripción de la técnica de exploración ultra-sónica utilizada y, así mismo, de la formación de la imagen TOFD. En la cuarta sección se presentarán dos algoritmos para corregir el desalineamiento de las señales A-Scan y, por último, la quinta sección incluirá las conclusiones.
ii. mEtodología dE adquisición dE datos
A. AntecedentesUn sistema prototipo de ultrasonido para ENDU consta de un excitador, un receptor, transductores o palpadores, un módulo de procesamiento y otro para exhibición de los resultados [11] [12].
En las primeras exploraciones con la técnica TOFD se rea-lizó la adquisición de los datos por medio del osciloscopio TDS210 de Tektronix mediante una conexión RS232 a un computador. El procedimiento proporciona un arreglo bidi-mensional de datos con muestras conteniendo la duración y la amplitud de las señales. Para completar la transmisión de datos desde el osciloscopio es necesario esperar entre 2.0 y 3.0 segundos después de solicitar el envío desde el computador. Luego de transmitidos, los datos deben ser almacenados por medio de instrucciones manuales en algún dispositivo de memoria no volátil; por ende, la adquisición y almacenamiento de una muestra puede tardar de 7.0 a 15 segundos dependiendo de la habilidad del inspector encargado.
Si se consideran exploraciones de alta resolución es nece-sario tomar muestras con pasos de 1,0 mm, lo que implica cientos de muestras en trayectos relativamente cortos. Las probetas exploradas durante la investigación tienen una longitud útil de aproximadamente 15 centímetros, lo que acarrea una duración de 18 a 38 minutos. Posteriormente, es necesario extraer los 2.500 datos de cada paso de avan-ce para incluirlos en un programa de procesamiento de señales que permita operar sobre las muestras, para lo cual es necesario realizar un proceso de “copiar y pegar” con destino a un archivo en Matlab que permite ensamblar una matriz bidimensional. Este proceso es manual y requiere la inversión de 10 a 15 segundos por cada muestra. De nuevo el proceso demanda un tiempo considerable de entre 25 y 38 minutos para una exploración completa de la probeta, además de someter al operario a una tarea que produce fatiga, lo que a su vez puede inducir errores de apreciación cuando el inspector examina las señales.

Formación de imágenes ultrasónicas por Difracción de Tiempo de Vuelo (TOFD)A. Rodríguez, M. Hernández, E. Forero
29Intekhnia | Vol. 6 | No. 1| Enero - junio de 2011 | ISSN: 1900-7612 | pp. 25 - 34
B. Innovaciones en la metodologíaSe logró optimizar significativamente el proceso de adqui-sición, ya que el nuevo procedimiento se realiza por medio del osciloscopio TDS1002B de Tektronix a través de co-nexión USB al computador. Para administrar la conexión es necesario disponer de la herramienta “Instrument Control” de Matlab. Luego de instalar los programas requeridos y configurarlos adecuadamente se obtiene una comunicación USB con el osciloscopio que permite su control remoto así como la adquisición y almacenamiento de los datos.
Se diseñaron dos algoritmos: uno que permite establecer la comunicación con el osciloscopio y seleccionar el canal a través del cual se logra el control sobre la adquisición de datos, y otro que permite la captura de los valores de la amplitud correspondientes a la visualización actualizada en el osciloscopio. Los citados algoritmos reciben las etiquetas de identificación que se crean al establecer la conexión y permiten que el usuario elija el canal. En el siguiente paso, se le proporcionan dos metodologías de adquisición al usua-rio. Con la primera la adquisición es continua e indefinida, mientras que en la segunda el usuario determina la cantidad de muestras que desea almacenar. En uno y otro caso se llama a una función que establece una interfaz gráfica fa-cilitando la identificación de la tecla pulsada por el usuario y que permite pausar, continuar o concluir la adquisición sin importar en qué momento sea requerido. Luego del inicio de dicha función, comienza un ciclo que ordena al osciloscopio la transmisión de los datos correspondientes a las amplitudes(ignorando el vector correspondiente a su posición temporal) y los almacena en una posición particular de una matriz bidimensional. Para concluir la fase de dicho ciclo, se emite una señal sonora que indica al usuario que el proceso ha concluido y comienza una nueva repetición del ciclo dando paso a la siguiente muestra. El ciclo concluye según la opción elegida por el usuario o si lo ha indicado por medio de la interfaz gráfica. Una vez concluido este, los datos son almacenados en un fichero de nombre configurable de extensión DAT, y el algoritmo requiere 3.0 segundos para comenzar el proceso de adquisición y tarda entre 1.5 y 2.0 segundos en recibir y almacenar los 2.500 datos provenien-tes de las amplitudes de una muestra. Esta tarea demanda 5.0 minutos para finiquitar el proceso sin necesidad de la intervención continua del inspector, lo que representa una
reducción de 70 minutos (92%) en el proceso y elimina el esfuerzo mecánico que requiere la instrucción manual
iii. técnica tofd
Como ya se mencionó en la introducción, la difracción de tiempo de vuelo TOFD [13] [14] requiere la utilización de dos transductores de ultrasonido, uno de los cuales actúa como emisor y el otro como receptor. Previamente el trans-ductor emisor ha sido estimulado por una fuente excitadora, y en consecuencia envía un haz de ondas acústicas al interior del espécimen bajo estudio. Dado que los campos acústi-cos de los transductores para estas tareas son amplios, en ausencia de discontinuidades o grietas su frente de onda se despliega de modo tal que una parte del mismo se propaga casi paralela a la superficie en la que están situados ambos transductores, y otra parte se refleja en la pared posterior para dar origen a un eco de fondo (Figura 1).
Una de las características más relevantes en la exploración de soldaduras por medio de la técnica TOFD, consiste en la obtención de un plano bidimensional conformado por una sucesión de señales A-Scan [15], que generalmente se representa en escala de grises, de modo tal que el tono correspondiente se obtiene de forma proporcional a la am-plitud relativa entre las señales. De manera más concreta, el D-Scan se forma al agrupar una serie de barridos tipo A-Scan, visualizando una vista superior de dicho agrupamiento y asignando tonalidades de gris asociadas a la amplitud relativa de la señal en cada posición, obteniéndose así un plano que representa un corte transversal de la exploración, en donde la región superior corresponde a la superficie de la misma, la región media a la difracción causada por las discontinuidades de la soldadura [16][17][18][19][20], mientras que la región inferior representa los ecos de fondo reflejados por la cara posterior del espécimen bajo examen.
iV. alinEamiEnto dE las sEñalEs a-scan
Un problema que frecuentemente surge en las imágenes obtenidas después de una exploración TOFD consiste en una falta de homogeneidad en la posición relativa de las muestras, la cual es causada por pequeños movimientos perpendiculares al cordón de soldadura y variación del

30
Formación de imágenes ultrasónicas por Difracción de Tiempo de Vuelo (TOFD)A. Rodríguez, M. Hernández, E. Forero
Intekhnia | Vol. 6 | No. 1| Enero - junio de 2011 | ISSN: 1900-7612 | pp. 25 - 34
espesor del acoplante acústico, lo que produce la ilusión de que la superficie del material es curva o rugosa, dificultando, por tanto, la conclusión por parte del inspector respecto a la existencia y naturaleza de los defectos. En la Figura 4 se puede observar un D-Scan que presenta esa problemática.
Figura 4. Imagen D-Scan con carencia de linealidad en la posición relativa de las trazas
Fuente: Autores.
Para solucionar la dificultad señalada anteriormente es necesario que el material explorado tenga una superficie plana; de lo contrario, la incertidumbre sobre la naturaleza de la misma no permite diseñar algoritmos que reflejen el modelo real.
Una primera alternativa consiste en un algoritmo que per-mite detectar el punto máximo de cada muestra A-Scan en la matriz de la exploración D-Scan, para luego hallar cuál es la distancia con respecto a una posición determinada y corregir su posición agregando o eliminando datos en los extremos según sea necesario. La eliminación de los datos extremos no altera la información relevante a la exploración, ya que está contenida en la región media de cada barrido; es decir, limitada por las ondas difractadas. En las figuras 5 y 6 se observa este proceso para dos muestras de la matriz.
Sin embargo, el algoritmo únicamente funciona en aque-llos casos en los que la superficie y el fondo de material explorado son planos y equidistantes en todo punto; en caso contrario, la alineación se realizaría asumiendo la inexistencia de dichas imperfecciones.
Teniendo en cuenta la limitación descrita, es necesario implementar otro algoritmo que no dependa de las con-diciones del fondo del material; esto es, una metodología basada en la onda lateral, que sí constituye un sistema de referencia fiable al momento de establecer la posición relativa de las observaciones con respecto a la superficie
de la placa. El algoritmo aísla una muestra de la matriz general, y posteriormente le resta el promedio de sí misma (centrando su posición alrededor del cero en la vertical); luego se determina la desviación estándar de los primeros datos correspondientes a la zona previa a la onda lateral, para poder establecer un patrón de oscilación alrededor de cero, y que debe ser ignorado al buscar la citada onda.
Figura 5. Detalle de dos muestras A-Scan sin alineamiento de posición
Fuente: Autores.
Figura 6. Detalle de dos muestras A-Scan luego de aplicado el algoritmo
Fuente: Autores.
Se realiza entonces un barrido dentro de la muestra en busca de los valores mayores a un umbral proporcional a la desviación estándar calculada, para de esta manera ase-gurar la obtención de picos significativos en la misma. En la Figura 7 se observa una comparación entre una muestra y el resultado de la metodología descrita.

Formación de imágenes ultrasónicas por Difracción de Tiempo de Vuelo (TOFD)A. Rodríguez, M. Hernández, E. Forero
31Intekhnia | Vol. 6 | No. 1| Enero - junio de 2011 | ISSN: 1900-7612 | pp. 25 - 34
Figura 7. Muestra A-Scan aislada (superior) y picos mayores que el umbral de referencia (inferior)
Fuente: Autores.
Una vez se han obtenido los picos se realiza un barrido a través de la muestra, deteniéndose el proceso cuando se detecta una inversión de la pendiente que determina el pri-mer pico de izquierda a derecha. La posición de este pico es almacenada temporalmente para fijar el desplazamiento que se debe aplicar con el objeto de alinear la muestra con respecto a las demás. Una vez concluido el proceso para una muestra, se continúa consecutivamente con todas las muestras hasta finalizar la matriz de datos. El resultado de alinear un par de muestras se observa en las figuras 8 y 9.
Figura 8. Vista y detalle de dos muestras A-Scan sin alineamiento
Fuente: Autores.
Figura 9. Vista y detalle de dos muestras A-Scan luego de aplicado el algoritmo
Fuente: Autores.
Después de realizado el alineamiento el programa muestra la imagen correspondiente a la matriz original y la imagen de la matriz alineada. Esta visualización permite encontrar posibles errores en el alineamiento tal y como se evidencia en la Figura 10 (obsérvese el círculo que contiene un error de alineación).
Figura 10. Imagen de la matriz original (superior) y de la alineada (inferior)
Fuente: Autores.
Si se encuentran errores en la imagen inferior atribuidos a variaciones imprevistas en la forma típica del A-Scan, entonces es necesario corregir la posición deseada para la muestra. El proceso debe ser realizado manualmente después de analizarse la muestra, debido a que el cambio

32
Formación de imágenes ultrasónicas por Difracción de Tiempo de Vuelo (TOFD)A. Rodríguez, M. Hernández, E. Forero
Intekhnia | Vol. 6 | No. 1| Enero - junio de 2011 | ISSN: 1900-7612 | pp. 25 - 34
de forma que produjo el error de alineamiento puede ser un desperfecto real en la superficie del material, caso en el cual la posición no correspondería a la calculada por el algoritmo sino a una posición prevista por el inspector. En la Figura 11 se observa la muestra que presenta el error de alineamiento, donde la línea representa la posición ideal de la onda lateral.
Figura 11. Muestra alineada erróneamente
Fuente: Autores.
Luego de corregir el desplazamiento se observa la muestra seleccionada y la matriz general para verificar que no per-sista el error (Figura 12).
Figura 12. Visualización de la muestra A-Scan corregida
Fuente: Autores.
El resultado del procesamiento de todas las muestras por medio de este programa permite observar los detalles con una mayor claridad, mostrando una posición relativa más acorde con las condiciones físicas de la placa explorada (Figura 13). Se observan imperfecciones en el fondo que hubiesen producido errores con el primer algoritmo.
Figura 13. Imagen D-Scan con alineamiento de muestras
Fuente: Autores.
En la Figura 14 se presenta un diagrama de bloques que muestra el algoritmo descrito en la sección IV del artículo; esto es, tanto la parte que realiza la alineación de los A-Scan, como el encargado de formar las imágenes D-Scan.
Figura 14. Diagrama de bloques que ilustra el algoritmo
Fuente: Autores.
V. conclusionEs
Se consiguió solucionar el problema de falsas indicaciones de eventuales defectos causadas por muestras no alineadas que se presenta en las imágenes D-Scan obtenidas en eva-luación de cordones de soldadura. El procedimiento imple-mentado introduce un algoritmo de alineación de muestras una vez se han obtenido las señales en forma digital. Este avance hace más confiable el resultado de la inspección, por cuanto corrige el desalineamiento de los barridos por amplitud, introducido por heterogeneidades tanto de la sustancia de acople, como por rugosidades en la superficie del espécimen bajo exploración.
De otra parte, los logros de la investigación realizada condujeron a una notable reducción en la metodología de adquisición de datos de la técnica de difracción de tiempo de vuelo; específicamente, de una duración de alrededor de
Conjunto de
barridos A-Scan por
exploración de una
probeta
Cálculo de la
desviación estándar
Fijar un umbral para
la ventana
Extraer el primer
A-Scan
Extraer una nueva
A-Scan
Determinación del
signo de la
pendiente
Extracción de los
valores superiores a
la ventana
Detección y
almacenamientodel
primer pico

Formación de imágenes ultrasónicas por Difracción de Tiempo de Vuelo (TOFD)A. Rodríguez, M. Hernández, E. Forero
33Intekhnia | Vol. 6 | No. 1| Enero - junio de 2011 | ISSN: 1900-7612 | pp. 25 - 34
80.0 minutos a únicamente 5.0 minutos, lo cual se refleja en una gran disminución de la fatiga asociada al trabajo de inspección.
Con la optimización del sistema de ultrasonido desarrollado, el grupo se beneficia al contar con la instrumentación acorde para futuros proyectos de investigación.
La combinación de algoritmos implementados constituye un gran avance en la investigación en tanto que reduce el tiem-po y esfuerzo que implica la exploración ultrasónica para la búsqueda de discontinuidades en cordones de soldadura.
Vi. rEfErEncias
[1] J. A. Rodríguez, S. Sandoval, J. Vitola, “Fundamentos Teórico-Prácticos de Ultrasonido”, Revista Tecnura, año 10 No. 20, pp. 4-18. 2007,
[2] J. A. Rodríguez, J. Vitola, y S. Sandoval, “Diseño y Construcción de un Sistema de Ultrasonido para la detección de Discontinuidades en Soldadura”, Revista Colombiana de Física, Vol. 41 No. 1, pp. 159-161. 2009.
[3] J. A. Rodríguez, J. Vitola, S. Sandoval y E. Forero, “Diseño y construcción de un sistema para examen no destructivo de fallas y defectos en metales utilizando señales ultrasónicas”, Revista EIA, No. 12, pp. 9-21. 2009.
[4] E. Forero, J. A. Rodríguez, “Procesamiento Digital de Señales TOFD”, Journal STSIVA. 2008.
[5] Z. Wang, Y. Zhou and J. Tian, “TOFD Scan Imaging Based on Synthetic, Aperture Focusing Technique”, 17th World Conference on Nondestructive Testing, 25-28 Oct. 2008, Shanghai, China, pp. 1-7.
[6] J. Verkooijien and A. McLay, “Integrated of Flight Diffraction Set Up Software”, 17th World Confe-rence on Nondestructive Testing, 25-28 Oct. 2008, Shanghai, China, pp. 1-7.
[7] S. W. Lawson and G. A. Parker, “Automatic Detection of Defects in Industrial Ultrasound Images Using a Neural Networks”, 17th World Conference on Non-destructive Testing, 25-28 Oct. 2008, Shanghai, China, pp. 1-7.
[8] S. Baby, T. Balassubramanian, R. J. Pardikar, M. Palaniappan and R. Subbaratnam, Time of Flight Diffraction (TOFD) Technique for Accurate Sizing of Surface Breaking Cracks, Institute of Materials and Minig, 2007, pp. 1-6.
[9] Y. Teng, D. Wu and Z. Zhao, “Application of Full Data Acquisition Technology in Automatica Ultrasonic Ins-pection”, 17th World Conference on Nondestructive Testing, 25-28 Oct. 2008, Shanghai, China, pp. 1-8.
[10] C. Shekhar, N.Shitole, O.Zahran and W. Al-Nuaimy, “Combining Fuzzy Logic and Neural Networks in Classification of Weld Defects using Ultrasonic Time of Flight Diffraction”, 45th Annual British Conference on NDT, Stratford-upon-Avon, UK, Sept. 2006, pp. 1-4.
[11] J. P. Bentley, Sistemas de Medición, México: Com-pañía Editorial Continental, S.A., 1993, pp. 475-496.
[12] L. Svilainis and V. Puodziunas, “Ultrasonic NDE: The Harware Concept”, Ultragarsas,Vol. 29 No. 1, 1998, pp. 1-7.
[13] J. J. P. Charlesworth, Engineering Applications of Ultrasonic Time of Flight, Research Studies Press, 2001.
[14] A. Volker and M. Van Der Heiden, “Controlled Excitation of Ultrasonic Transducers”, 17th World Conference on Nondestructive Testing, 25-28 Oct. 2008, pp. 1-8.
[15] K.Y. Yuang, W.A. Song and Y.F. Cheng, “Simulation of Scattering Acoustic Field in Rod and Identify of Ultrasonic Flaw Detecting Signal”, 17th World Con-ference on Nondestructive Testing, 25-28 Oct. 2008, Shanghai, China, pp. 1-9.

34
Formación de imágenes ultrasónicas por Difracción de Tiempo de Vuelo (TOFD)A. Rodríguez, M. Hernández, E. Forero
Intekhnia | Vol. 6 | No. 1| Enero - junio de 2011 | ISSN: 1900-7612 | pp. 25 - 34
[16] M. Moles and S. Labbé, “Weld Inspections, Phased Arrays and Diffraction Sizing”, 17th World Confe-rence on Nondestructive Testing, 25-28 Oct. 2008, Shanghai, China, pp. 1-7.
[17] T. Gang, and D. Z. Chi, Novel Approach to Enhan-cement of Ultrasonic TOFD B- Scan Image for Mea-surement of Weld, Institute of Materials and Mining, 2007, pp. 87-93.
[18] T. Gang and D. Chi, “Ultrasonic TOFD Testing Model for Crack Measurement in Thick Wall Weldment”, 17th World Conference on Nondestructive Testing, 25-28 Oct. 2008, Shanghai, China, pp. 1-6.
[19] M. Rialú and M. R. Abolhasanv, “Substitution of the Time of Flight Diffraction Technique for Nondes-tructive Testing of Welds and Thick Layers”, Russian Journal of Nondestructive Testing, Vol. 42 No. 12, pp. 794-801. 2006.
[20] R. Martínez, T.S. Viggianiello and A. Bleuze, Quali-fication of TOFD Technique for Austenitic Stainless Steel Welds Inspection, ECNDT, 2006, pp. 1-7.