-
8/21/2019 Forrest Math148notes
1/199
Math 148: Calculus II
Instructor: Brian E. Forrest
December 30, 2009
-
8/21/2019 Forrest Math148notes
2/199
Chapter 1
Integration
This chapter is devoted to basic integral calculus; we explore
the definitions,properties, and techniques of integration. We will
prove the fundamental theo-rem of calculus —one of the
most important theorems in analysis.
1.0 Areas Under a Curve
Problem. How do we find areas under the graph of a function
f (x)?
Example 1.1. Determine the area bounded by the graph
of f (x) = x2, thelines x = 0,
x = 1, and y = 0.
1. Let A be the area of the region R.
2. We can approximate the area by a rectangle with height equal
to f (1)(i.e., f (1) = 12 = 1) and the base
over the interval [0, 1]. The area of thisrectangle is given by
E 0 = height × base = 1 × 1 = 1. Note
that A ≤ E 0.
3. Next we split the interval [0, 1] into two equal parts at
x = 12 . In this case,R =
R1 + R2 and we can estimate the area
of R by estimating the areasof R1
and R2. Let A1 and A2 denote the
area of R1 and R2, respectively.
Repeating these steps, we
estimate A1 and A2 just as before—with
rectanglesof heights, respectively, f ( 12) =
14 , f (1) = 1, and of bases, respectively,
12−0 = 12 ,
1 − 12 = 12 . Hence,
A1 ≈ f 121
2 − 0 = 1
221
2
= 18
and
A2 ≈ f (1)
1 − 12
= 12
1
2
=
1
2,
1
-
8/21/2019 Forrest Math148notes
3/199
whence A = A1 + A2 ≈ 18
+ 12 = 58 .In general, we can divide the
interval [0, 1] into n identical parts. Let
Ai
denote the area of Ri; then
R = R1 + R2 + · · · + Rn,A =
A1 + A2 + · · · + An.
We see that Ai ≈ f ( in)( in −
i−1n ) = ( in)2 · 1n . Hence
A = A1 + · · · + An =n
i=1
Ai
≈n
i=1
( i
n)2 · 1
n
= 1n3
ni=1
i2
= 1
n3
n(n + 1)(2n + 1)
6
= 1 · (1 + 1n)(2 + 1n)
6 .
Note that limn→∞n
i=1( in)2( 1n) = limn→∞
1·(1+ 1n )(2+ 1n )6
= 13 .
Question: Is 13 the area of the region
R?
We want A ≥ 13 , since this will show that A
= 13 .
Strategy: Instead of taking the right-hand sum, we take the
left-hand sum; weare now underestimating.
If we again divide [0, 1] into n equal parts to
generate subregions R1, . . . Rn,we can once more estimate
the area Ai of Ri by
approximating Ri with rectanglewhose base is on [ i−1n
,
in ] and whose height equals f (
i−1n ). In this case, we have
Ai ≈ f
i − 1n
· 1
n =
i − 1
n
2· 1
n = (i − 1)2
1
n3
,
A ≥n
i=1
(i−1)2· 1n3
= 1
n3
n−1i=1
i2 = 1
n3
(n − 1)(n)(2n − 1)
6
=
(1 − 1n)(1)(2 − 1n )6
,
and hence
A ≥ limn→∞
(1 − 1n)(1)(2 − 1n )6
= 13
.
Conclusion: A = 13 . With this section as our
motivation, we can now definewhat an integral is;
as a result, we will be able to define formally the
conceptof area .
2
-
8/21/2019 Forrest Math148notes
4/199
1.1 Integrals and Riemann Sums
Definition 1.1.1. Let [a, b] be a finite, closed
interval. A partition P of [a, b]is a
finite subset of [a, b] of the form
P = {xi : a = x0 <
x1 < · · · < xn = b}.
Definition 1.1.2. For a
partition P of [a, b] having n
elements,1. define ∆xi := xi − xi−1, and2. define the
norm of P , denoted as P,
by
P := max{∆xi : i = 1, 2, . . . , n}.
Example 1.2. For any n ∈
N we can construct the n-regular
partition P n of [a, b] by subdividing
[a, b] into n identical parts with the length of each
subin-terval being b−an . I.e., ∆xi =
b−an for each i, and P = b−an
. Note that
x1 = a + b − a
n ,
x2 = a + 2 · b − an
,
...
xi = a + i · b − an
,
.
..xn = a + n · b − a
n = b.
Assume that f (x) is bounded on [a, b].
Let P be a partition on [a, b]. LetM i =
sup{f (x) : x ∈ [xi−1, xi]},
and letmi = inf {f (x) : x ∈ [xi−1,
xi]}.
Then mi ≤ f (x) ≤ M i for all
x ∈ [xi−1, xi].
Definition 1.1.3. Given f (x), bounded on
[a, b], and a partition P of [a, b], wedefine
the upper Riemann sum of f (x) with
respect to P by
U(f, P ) := Uba(f, P ) =n
i=1
M i · ∆xi,
3
-
8/21/2019 Forrest Math148notes
5/199
and the lower Riemann sum of
f (x) with respect to P by
L(f, P ) := Lba(f, P ) =n
i=1
mi · ∆xi,
where M i and mi are defined as
above. Finally, for each i, choose ci ∈ [xi−1,
xi];a Riemann sum for f (x)
on [a, b] with respect
to P is defined by
Sba(f, P ) =n
i=1
f (ci)∆xi.
The bounds of summation a and b from
definition 1.1.3 are usually omitted.
Remark 1.1.4. Since mi ≤
f (ci)
≤M i and ∆xi > 0, we can conclude
that
Lba(f, P ) ≤ Sba(f, P ) ≤ Uba(f, P ).
Definition 1.1.5. Given a partition P , we say
that a partition Q is
a refinement of P if and only
if P ⊆ Q. We also say that Q
refines P or P is
refined by Q.
Theorem 1.1.6. Let f (x) be
bounded on [a, b]. Let P , Q
be partitions on [a, b]with Q a
refinement of P . Then
L(f,
P )≤
L(f,
Q)≤
U(f,
Q)≤
U(f,
P ).
Proof. Assume that Q = P ∪ {y0}
for some y0 ∈ [a, b] \ P .
Hence Q ={xi, y0 : a = x0
< x1 < · · · < xi−1
< y0 < xi < · · · < xn
= b} andP = {xi :
a = x0 < x1 < · · · < xn =
b}. Let
M j = sup{f (x) : x ∈ [xj−1, xj
]},mi = inf {f (x) : x ∈ [xj−1, xj]}.
Also let
M i,1 = sup{f (x) : x ∈ [xi−1, y0]},mi,1
= inf {f (x) : x ∈ [xi−1, y0]},M i,2
= sup
{f (x) : x
∈[y0, xi]
},
mi,2 = inf {f (x) : x ∈ [y0, xi]}.
Note that since f ([xi−1, xi]) ⊇
f ([xi−1, y0]) and f ([xi−1, xi]) ⊇
f ([y0, xi]), we
4
-
8/21/2019 Forrest Math148notes
6/199
have that M i,1 ≤ M i and
M i,2 ≤ M i. Similarly, mi,1 ≥ mi
and mi,2 ≥ mi. Now
U(f, P ) = nj=1
M j · ∆xj
=nj=1j=i
+M j · ∆xj + M i · ∆xi
=nj=1j=i
+M j · ∆xj + M i(y0 − xi−1) + M i(xi −
y0)
≥nj=1j=i
+M j · ∆xj + M i,1(y0 − xi−1) +
M i,2(xi − y0)
= U(f, Q).Similarly,
L(f, P ) =n
j=1
mj · ∆xj
=nj=1j=i
+mj · ∆xj + mi · ∆xi
=nj=1j=i
+mj · ∆xj + mi(y0 − xi−1) + mi(xi − y0)
≤nj=1j=i
+mj · ∆xj + mi,1(y0 − xi−1) + mi,2(xi − y0)
= L(f, Q).
Due to remark 1.1.4, we conclude that
L(f, P ) ≤ L(f, Q) ≤ U(f, Q) ≤ U(f, P ).
We can use induction on the number of points in
Q\P to establish the theorem.
Corollary 1.1.7. If P
and Q
are partitions of f (x)
on [a, b], then L(f,P
)≤U(f, Q).
Proof. Let T = P ∪ Q.
Then T refines both P and Q.
Hence L(f, P ) ≤L(f, T ) ≤ U(f, T ) ≤ U(f, Q),
as desired.
5
-
8/21/2019 Forrest Math148notes
7/199
Definition 1.1.8. Let f (x) be bounded on
[a, b]. The upper Riemann integral for
f (x) over [a, b] is b
a
f (x) dx = inf {U(f, P ) :
P a partition of [a, b]},
and the lower Riemann integral for f (x)
over [a, b] is ba
f (x) dx = sup{L(f, P ) : P a
partition of [a, b]},
Observation. ba
f (x) dx ≥ ba
f (x) dx.
1.2 Integrable Functions
Definition 1.2.1. We say that f (x)
is Riemann integrable on [a, b]
if ba
f (x) dx =
ba
f (x) dx,
in which case we denote this common value by ba
f (x) dx.
In definitions 1.1.8 and 1.2.1, we encountered new notations:
the is theintegral sign , a and
b are endpoints of integration ,
f (x) is the integrand , and dxrefers
to the variable of integration (also called the
dummy variable )—in thiscase it is x.
Example 1.3. Let
f (x) =
1 if x ∈ [0, 1] ∩Q,−1 if x ∈ [0, 1] \
Q.
If P = {xi : 0 = x0 <
x1 < · · · < xn = 1}, then letM i =
sup{f (x) : x ∈ [xi−1, xi]},mi =
inf {f (x) : x ∈ [xi−1, xi]}.
We have that
U(f, P ) =n
i=1
M i · ∆xi =n
i=1
∆xi = 1, and
L(f, P ) =n
i=1
mi · ∆xi =n
i=1
−∆xi = −1.
6
-
8/21/2019 Forrest Math148notes
8/199
Hence
10 f (x) dx = 1 = −1 =
1
0 f (x) dx,
and hence this function is not integrable on [0 , 1].
Observation. f (x) in the above example is
discontinuous everywhere on [a, b].
Theorem 1.2.2. Let f (x) be
bounded on [a, b]. Then f (x)
is integrable on [a, b] if and only if for
every > 0 there exists a
partition P of [a, b] such
that U(f, P ) − L(f, P ) < .Proof.
Assume that f (x) is integrable on [a, b].
I.e.,
ba
f (x) dx =
ba
f (x) dx.
Let > 0. Since ba
f (x) dx = inf {U(f, P ) :
P is a partition}, there exists
apartition P 1 such that b
a
f (x) dx ≤ U(f, P 1) < ba
f (x) dx +
2.
Similarly, since
b
af (x) dx = sup{L(f, P ) : P is
a partition}, there exists a par-
tition
P 2 such that b
a
f (x) dx − 2
-
8/21/2019 Forrest Math148notes
9/199
To prove the converse, assume that for each > 0
there exists a partition P of [a, b] such that
U(f, P ) − L(f, P ) < .However, by definition
1.1.8, we have that
L(f, P ) ≤ ba
f (x) dx ≤ ba
f (x) dx ≤ U(f, P ),
and hence
0 ≤ ba
f (x) dx − ba
f (x) dx < .
Since is arbitrary, we obtain
ba
f (x) dx = ba
f (x) dx;
therefore f (x) is integrable on [a, b], as
required.
Example 1.4. Let f (x) = x2. Let
P n be the n-regular partition of [0, 1]. Then
U10(f, P n) =n
i=1
f (xi)∆xi =n
i=1
i2
n2 · 1
n
and
L10(f,
P n) =
n
i=1 f (xi−1)∆xi =n
i=1(i − 1)2
n2
·
1
n
.
Then
U(f, P n) − L(f, P n) =
n2
n2 · 1
n
−
02
n2 · 1
n
=
1
n.
This shows that for all > 0, we can find a
partition P such that U(f, P ) −L(f, P )
< (simply select a large enough n by the
Archimedean Principle anduse the n-regular
partition P n). Hence by theorem 1.2.2, f (x)
is integrable on[0, 1]. Later, we will be able to show that
10
x2 dx = 13
.
Recall the following definition.
8
-
8/21/2019 Forrest Math148notes
10/199
Definition 1.2.3. We say that f (x) is
uniformly continuous on an interval I if for
every > 0, there exists a δ > 0 such
that for all x, y
∈I ,
|x − y| < δ implies |f (x) −
f (y)| < .Also recall the following theorem.
Theorem 1.2.4 [Sequential Characterization of
Uniform Continu-ity]. A function f (x)
is uniformly continuous on an interval
I if and only
if whenever {xn}, {yn} are sequences
in I ,
limn→∞(xn − yn) = 0 implies limn→∞(f (xn) − f (yn)) =
0.
Example 1.5. Let I = R
and f (x) = x2. Take
{xn
} = n + 1n, {yn} = {n}.Then limn→∞(xn
− yn) = limn→∞ 1n = 0, but
limn→∞(f (xn) − f (yn)) = limn→∞
n +
1
n
2− n2
= limn→∞
2 +
1
n2
= 2 = 0.
Hence f (x) = x2 is not uniformly continuous on
R.
One should already be familiar with the following theorem.
Theorem 1.2.5. If f (x) is
continuous on [a, b], then f (x)
is uniformly contin-uous on [a, b].
Proof. Assume that f (x) is continuous on [a,
b] but not uniformly continuouson [a, b]. Then by theorem 1.2.4,
there exists sequences {xn} and {yn}
withlimn→∞(xn − yn) = 0 but limn→∞(f (xn) −
f (yn)) = 0. (Note that this limitmay not even exist.) By
choosing a subsequence if necessary, we can assumewithout loss of
generality that there exists an 0 > 0 such
that
(1.1) |(f (xn) − f (yn)) − 0| = |f (xn) −
f (yn)| ≥ 0for all n ∈ N.
Since {xn} ⊂ [a, b], by the Bolzano-Weierstrass
Theorem {xn} has a subse-quence
{xnk}
with limk→∞
xnk
= x0 ∈
[a, b]. Note that limk→∞
(xnk −
ynk
) = 0,hence limk→∞ ynk = x0 also. By the
sequential characterization of continuity,we have
limk→∞
f (xnk) = f (x0),
limk→∞
f (ynk) = f (x0).
9
-
8/21/2019 Forrest Math148notes
11/199
Therefore, we can select a K ∈ N with
|f (xnk) − f (x0)| < 0
2 and
|f (ynk) − f (x0)| < 0
2
for all k ≥ K . Hence we have, for all k ≥
K ,0 ≤ |f (xnk) − f (ynk)| ≤ |f (xnk) −
f (x0)| + |f (ynk) − f (x0)|
< 0
2 +
0
2= 0,
directly contradicting equation (1.1). Hence f (x) is
uniformly continuous on[a, b].
Theorem 1.2.6 [Integrability Theorem for Continuous
Functions].If f (x) is continuous
on [a, b], then f (x) is
integrable on [a, b].
Proof. Let > 0. Since f (x)
is continuous on [a, b], f (x) is also
uniformlycontinous on [a, b] by theorem 1.2.5 above. We can find a
δ > 0 such thatif |x − y| <
δ , then |f (x) − f (y)| < b−a
. Let P be a partition of [a, b] withP =
max{∆xi} < δ . For example, we can choose the
n-regular partitionof [a, b] with n large enough
(chosen by the Archimedean Principle) so thatb−an = P n
< δ . After we have chosen P , let
M i = sup{f (x) : x ∈ [xi−1, xi]},mi
= inf {f (x) : x ∈ [xi−1, xi]}.
By the extreme value theorem, there exists ci, di ∈
[xi−1, xi] such that f (ci) =mi and
f (di) = M i; note that M i − mi
= |M i − mi| = |f (di) −
f (ci)|. Since|ci − di|
-
8/21/2019 Forrest Math148notes
12/199
Remark 1.2.7. Assume that f (x) is
continuous on [a, b]. For each n, let P n bethe
n-regular partition. Then if S(f,
P n) is any Riemann sum associated with
P n, we have ba
f (x) dx = limn→∞S(f, P n).
Proof. Given > 0, we can find an
N large enough so that if n ≥
N , thenb−an < δ as defined in theorem
1.2.6 above. Hence
U(f, P n) − L(f, P n) < ,via a similar
argument made in theorem 1.2.6. But U(f, P n) ≥
S(f, P n) ≥L(f, P n) and U(f, P n) ≥
ba
f (x) dx ≥ L(f, P n). This implies that
b
a
f (x) dx − S(f, P n) < and so limn→∞ S(f,
P n) =
ba
f (x) dx, as remarked.
Note that the above remark shows that if f (x)
is continuous, we have ba
f (x) dx = limn→∞
ni=1
f
a + i · b − a
n
b − a
n
.
Definition 1.2.8. Given a
partition P = {xi : a =
x0 < x1 0, there
exists δ > 0 such that
if P is a partition of [a, b]
with P < δ , then S(f, P )
− ba
f (x) dx
< for any Riemann sum S(f, P ).
11
-
8/21/2019 Forrest Math148notes
13/199
Proof. Since f (x) is integrable, we can find a
partition P 1 of [a, b] with U(f, P 1)−L(f,
P 1) <
2 . In particular, for any Riemann sum S(f,
P 1), we have U(f,
P 1)
≥S(f, P 1) ≥ L(f, P 1) and U(f,
P 1) ≥ ba f (x) dx ≥ L(f,
P 1). Suppose P 1 ={xi : a =
x0 < x1 < · · · < xn = b}.
Then letM = sup{f (x) : x ∈ [a, b]},m =
inf {f (x) : x ∈ [a, b]}.
If M −m = 0, then f (x) is
constant on [a, b], so say f (x) = c for
all x ∈ [a, b].In this case U(f, P ) = c(b − a) =
L(f, P ) for any partition P . Hence any δ
> 0would satisfy the theorem and we are done. So assume
M > m.
Let δ < 2n(M −m) . Let P =
{yi : a = y0 < y1 < · · ·
< yj < · · · < yk = b} beany
partition of [a, b] with P < δ . Let
T = { j : j ∈ {1, 2, . . . , k},
and [yj−1, yj ] ⊆ [xi−1, xi] for some i}.Also, let
M j = sup{f (x) : x ∈ [yj−1, yj ]},mj
= inf {f (x) : x ∈ [yj−1, yj]}.
Then we have that
U(f, P ) − L(f, P ) =k
j=1
M j · ∆yj −k
j=1
mj · ∆yj
=k
j=1
(M j − mj)∆yj
= j∈T(M
j − mj)∆yj + j∈{1,2,...,k}\T(M
j − mj)∆yj .
Note that j∈T
(M j − mj)∆yj ≤ U(f, P 1 ∪ P )
− L(f, P 1 ∪ P )
≤ U(f, P 1) − L(f, P 1)<
2.
Observe that {1, 2, . . . , k} \ T has at most n
elements (since for each j ∈ T, wehave a unique
i such that yj−1 < xi−1 <
yj < xi; conversely for each such ithere exists a
unique j ∈ T—but there are only n points in
P 1). Hence for each
j ∈ {0, 1, . . . , k} \ T, we have(M j −
mj)∆yj ≤ (M − m) ·P
< (M − m) · 2n(M − m)
=
2n.
12
-
8/21/2019 Forrest Math148notes
14/199
This shows that
j∈{1,2,...,k}\T
(M j − mj)∆yj < j∈{1,2,...,k}\T
2n
≤ 2n
· n
=
2.
Hence, if P < δ , U(f, P ) −L(f,
P ) < 2 + 2 = ;
therefore, if S(f, P ) is anyRiemann sum, then S(f, P )
−
ba
f (x) dx
< ,as required.
This thoerem is a generalization of remark 1.2.7. In particular,
this theoremprovides an easy, alternate proof of remark 1.2.7. Here
we state the remarkagain as a corollary.
Corollary 1.2.10. If f (x)
is integrable on [a, b], then ba
f (x) dx = limn→∞S(
f, P n) = limn→∞
ni=1
f (ci) · b − an
,
where P n is the n-regular
partition of [a, b] and ci ∈
[xi−1, xi]. ( S(f, P n) is any Riemann
sum.)
Proof. Let > 0. By the above theorem, we
can find δ > 0 so that if P n
=1n < δ , S(f, P n) −
ba
f (x) dx
< for any Riemann sum S(f, P n). The result follows by
choosing an N (using theArchimedean Principle) so
that 1n ≤ 1N < δ for
all n ≥ N .
In general, we write ba
f (x) dx = limP→0
S(f, P ).
Theorem 1.2.11. Let f (x) be
monotonic on [a, b]. Then f (x)
is integrable on [a, b].
13
-
8/21/2019 Forrest Math148notes
15/199
Proof. Let P n be the n-regular
partition. Assume, without loss of generality,that f (x)
is nondecreasing on [a, b]. Then
U(f, P n) = SR(f, P n) =n
i=1
f (xi) · b − an
, and
L(f, P n) = SL(f, P n) =n
i=1
f (xi−1) · b − an
.
So
U(f, P n) − L(f, P n) =n
i=1
f (xi) · b − an
−n−1i=0
f (xi) · b − an
= b − a
n
[(f (x1) +
· · ·+ f (xn))
−(f (x0) + · · · + f (xn−1))]=
b − an
(f (xn) − f (x0))
= b − a
n (f (b) − f (a)).
Since limn→∞ b−an (f (b) − f (a)) =
0, f (x) is integrable on [a, b] by theorem1.2.2.
Question: Assume that f (x) is continuous on
[a, b] except at c. (Note thatf (x) is bounded on [a,
b].) Is f (x) still integrable on [a, b]?
Theorem 1.2.12. Assume that f (x)
is continuous on [a, b] except
at c ∈ [a, b].Then f (x) is
integrable on [a, b].
Proof. Let P = {xi : a
= x0 < x1 0. Let
M = sup{f (x) : x ∈ [a, b]},m =
inf {f (x) : x ∈ [a, b]},
M i = sup{f (x) : x ∈ [xi−1, xi]},mi
= inf {f (x) : x ∈ [xi−1, xi]}.
We can choose P so that ∆xi0 <
3(M −m) . Then (M i0 − mi0)∆xi0
≤(M
−m)∆xi0 < (M
−m) 3(M
−m) =
3 . Since f (x) is uniformly continuous
on [a, xi0−1], by refining as necessary, we can assume that if
0 ≤ i ≤ i0, thenM i − mi <
3(xi0−a) . We now have
i0−1i=1
(M i − mi)∆xi <i0−1i=1
3(xi0−1 − a)∆xi =
3
i0−1i=1
∆xixi0−1 − a
=
3.
14
-
8/21/2019 Forrest Math148notes
16/199
A similar argument shows, by refining if necessary, that
ni=i0+1
(M i − mi)∆xi < 3
.
Then
U(f, P ) − L(f, P ) =n
i=1
(M i − mi)∆xi
=
i0−1i=1
(M i − mi)∆xi + (M i0 − mi0)∆xi0
+
n
i=i0+1(M i − mi)∆xi
<
3 +
3 +
3= .
This shows that f (x) is integrable on [a, b] by
theorem 1.2.2.
Observation. Observe the following facts:
1. If f (x) is bounded on [a, b] and continuous
except at possibly at finitelymany points, then f (x) is
integrable on [a, b].
2. If f (x) is integrable on [a, b] and
g(x) = f (x) except at finitely manypoints, then
g (x) is integrable and b
a
f (x) dx =
ba
g(x) dx.
In fact, much more is true. Let (a, b) be an open interval.
Define the length of (a, b) to be
l(a, b) = b −a. We say that a subset A ⊂ R
has Lebesgue measure zero if for each >
0, there exists a sequence {(an, bn)} of open
intervals suchthat
A ⊆∞i=1
(ai, bi) and
∞i=1
l(ai, bi) < .
Diversion. Suppose A ⊂ R is countable. Then
A has Lebesgue measure zero.Proof. Assume that
A = {x1, x2, . . . , xi, . . .} is
countable. Let > 0. Let
15
-
8/21/2019 Forrest Math148notes
17/199
(an, bn) = (x − 2n+1 , x + 2n+1 ). Clearly,
A ⊂∞i=1(an, bn). Also,
∞i=1
l(an, bn) =∞i=1
l(x − 2n+1
, x +
2n+1)
=∞i=1
x +
2n+1 − x +
2n+1
=
∞i=1
2n
= ,
implying that A has Lebesgue measure zero.
Diversion. Let f (x) be a function on [a, b]. If
the set of points of discontinuityof f (x) on [a,
b] has Lebesgue measure zero, then f (x) is integrable
on [a, b].
1.3 Properties of Integrals
Theorem 1.3.1. Assume that f (x)
is integrable on [a, b], then
1. (cf )(x) = c · f (x) is
integrable on [a, b] and ba
(cf )(x) dx = c ba f (x)
dx for all c ∈ R.
2. If g(x) is also integrable on [a,
b], then (f +g)(x) = f (x)+g(x) is
integrable
on [a, b] and ba (f +
g)(x) dx = ba f (x) dx + ba g (x)
dx.Proof. To prove (1), we consider three cases:
c = 0, c > 0, and c 0. Since
f (x) is integrable, we can choose(by theorem 1.2.2) a
partition P such that Uba(f, P ) − Lba(f,
P ) < |c| . It is clearthat
U(cf, P ) = c · U(f, P ), andL(cf,
P ) = c
·L(f,
P ),
if c > 0 and
U(cf, P ) = c · L(f, P ), andL(cf,
P ) = c · U(f, P ),
16
-
8/21/2019 Forrest Math148notes
18/199
if c
-
8/21/2019 Forrest Math148notes
19/199
Theorem 1.3.4. Suppose f (x)
is integrable on [a, b]. Then
ba f (x) dx ≤ ba |f (x)|
dx.Proof. ¿From the observation above, we have
that b
a
f (x) dx =
ba
[f +(x) − f −(x)] dx
=
ba
f +(x) dx − ba
f −(x) dx (by theorem 1.3.1),
and that
b
a
|f (x)| dx = b
a
[f +(x) + f −(x)] dx
=
ba
f +(x) dx +
ba
f −(x) dx (by theorem 1.3.1).
Since f +(x) ≥ 0 and
f −(x) ≥ 0 on [a, b], ba
f +(x) dx ≥ 0 and ba
f −(x) dx ≥ 0(all Riemann sums
Sba(f +, P ) and Sba(f −, P ) are greater than
or equal to 0 forall partitions P of [a, b]).
Hence we can now show that
ba
f (x) dx
= ba
f +(x) dx − ba
f −(x) dx
≤
ba
f +(x) dx
+
ba
f −(x) dx
= ba
f +(x) dx + ba
f −(x) dx
=
ba
|f (x)| dx,
as required.
Definition 1.3.5 [Geometric Interpretation of the
Definite Inte-gral]. If f (x) ≥ 0
on [a, b] and integrable on [a, b], then the area under
the curve bounded by y = f (x),
y = 0, x = a
and x = b is
b
a
f (x) dx.
Now suppose f (x) is no longer restricted to be
nonnegative on [a, b]. Then thearea above the x-axis
bounded by y = f (x), y = 0,
x = a and x = b
is b
a
f +(x) dx.
18
-
8/21/2019 Forrest Math148notes
20/199
Similarly, the area below the x-axis bounded
by y = f (x), y = 0,
x = a and x = b
is b
a
f −(x) dx.
¿From these, we can finally define the area bounded
by y = f (x), y = 0,
x = aand x = b, A,
as the sum of the area above the x-axis and the area below
thex-axis bounded by the same curves; i.e.,
A :=
ba
f +(x) dx +
ba
f −(x) dx = ba
|f (x)| dx.
Theorem 1.3.6. Let f (x) be
bounded on [a, b] and let a < c <
b. Then f (x) is integrable
on [a, b] if and only
if f (x) is integrable on [a, c]
and on [c, b]. In this case, we have
b
a
f (x) dx = ca
f (x) dx + bc
f (x) dx.
Proof. Assume that f (x) is integrable on [a,
b]. Let > 0. Since f (x) is
inte-grable, we can find a partition P with
P = {xi : a = x0 < x1
< · · · < xn = b}for which
U(f, P ) − L(f, P ) < .By refining if
necessary, we can assume that c = xk for
some 0 < k < n, sosuppose that
P =
{xi : a = x0 < x1 <
· · ·< xk = c <
· · ·< xn = b
}.
Now let P 1 = {xi : a =
x0 < x1
-
8/21/2019 Forrest Math148notes
21/199
This shows that f (x) is integrable on [a, c] and
[c, b] respectively, by theorem1.2.2.
Now assume the converse: f (x) is integrable on [a,
c] and on [a, b]. Let > 0.Let P 1
= {xi : a = x0 < x1
-
8/21/2019 Forrest Math148notes
22/199
Remark 1.3.8. All of our properties of integrals
are still valid with this ex-panded definition.
For example, we can show that the following theorem is true.
Theorem 1.3.9. Let f (x) be
bounded and integrable on an interval I
containing a and b, a = b. Suppose
that m ≤ f (x) ≤ M for all x
∈ I . Then
m ≤ 1b − a
ba
f (x) dx ≤ M.
Proof. We know that if a < b, then the
theorem holds. Indeed, if P = {xi :
a =x0 < x1 < . . . < xn =
b} is any partition of [a, b] and Lba(f, P ) is any
lowerRiemann sum, then we have
m(b − a) = m ni=1
∆xi
=n
i=1
m · ∆xi
≤n
i=1
mi · ∆xi
= Lba(f, P )
≤ ba
f (x) dx,
where mi := inf f ([xi−1, xi]).
Similarly, ba f (x) dx ≤ M (b−a). Dividing
these two inequalities by the positive
quantity b − a yields the theorem.To prove the
theorem for the case when a > b, we simply note that
1
b − a ba
f (x) dx = 1
a − b · − ba
f (x) dx = 1
a − b ab
f (x) dx
by definition 1.3.7. We now apply the first paragraph of the
proof to thisequivalent quantity with the roles of a
and b reversed and the theorem follows.
Definition 1.3.10. If f (x) is
integrable on [a, b], then we define the
average value or the mean value
of f on [a, b] as the
quantity
1
b − a ba
f (x) dx.
21
-
8/21/2019 Forrest Math148notes
23/199
We now give two intuitive justifications for the
terminology average value indefinition 1.3.10.
1. Geometric justification. The “signed area” spanned by
the curve of f over [a, b] indicates the “sum” of
all values of f over [a, b]. Dividing
thisby the length of the interval [a, b] indicates, on average, how
much eachvalue of f (x) contributed to the
area:
1
b − a ba
f (x) dx.
That is to say, the average value µ
of f should accomplish the
following:The area of the rectangle whose base is [a, b] and whose
height is µ is equalto the area of the region bounded
by f whose base is also [a, b]. One canview µ
as the average height of f on [a,
b].
2. Sampling. We can sample the values
of f at different points and simplyaverage
them (in the finite sense). Then we can let the number of
samplepoints go to infinity (in a way that we end up sampling each
part of the curve equally). To accomplish this,
let P n be the n-regular partitionof [a, b].
The average of the values of the right-hand endpoints of
thispartition is:
f (x1) + f (x2) + · · · + f (xn)n
= 1
b − a
f (x1)b − a
n + f (x2)
b − an
+ · · · + f (xn) b − an
=
1
b − an
i=1f (xi)∆xi
= 1
b − a SR(f, P n).
Letting n → ∞—i.e., letting the number of sample
points go to infinityin a way that different parts of the curve get
sampled equally—we obtain
limn→∞
1
b − a SR(f, P n) = 1
b − a ba
f (x) dx,
by theorem 1.2.10.
1.4 The Fundamental Theorem of CalculusIn this section we will
prove an important theorem: the fundamental theoremof calculus.
First we will prove something about integral functions—functionsof
the form F (x) =
xa
f (t) dt.
22
-
8/21/2019 Forrest Math148notes
24/199
Theorem 1.4.1. Assume that f (t)
is defined on an interval I
containing a point a and for
each x
∈I , the integral xa f (t) dt
exists. Also assume that there exists
an M ∈ R such
that |f (t)| ≤ M , for all t ∈
I . Then the function
F (x) :=
xa
f (t) dt
satisfies |F (x) − F (y)| ≤ M |x − y|
for all x, y ∈ I .Proof.
First note that
ψφ
f (t) dt
=
φψ
f (t) dt
.
for all φ, ψ ∈ I . With this observation,
we have, with the help of theorems 1.3.4and 1.3.6, that
|F (x) − F (y)| = xa
f (t) dt − ya
f (t) dt
=
xa
f (t) dt +
ay
f (t) dt
=
xy
f (t) dt
≤
x
y
|f (t)| dt
≤ x
y
M dt
= M |x − y|.The second inequality follows from an
exercise in Riemann sums.
Corollary 1.4.2. With notation the same as the
above theorem, F (x) is uni- formly continuous
on I .
Proof. Let > 0. Put δ =
M . Then if x, y ∈
I are such that |x − y| < δ , thenwe
have
|F (x)
−F (y)
| ≤M
|x
−y
|< M δ = M
M = ,
implying the theorem.
Question: Is it possible to show that F (x) is
also differentiable? If so, what isF (x)?
This major theorem answers the above question.
23
-
8/21/2019 Forrest Math148notes
25/199
Theorem 1.4.3 [First Fundamental Theorem of
Calculus]. Assume that f (t) is
defined on an interval I
containing a. Also suppose that xa
f (t) dtexists for all x ∈ I ;
define
F (x) :=
xa
f (t) dt.
Let x0 be in the interior
of I (i.e., there exists an
> 0 such that (x0−, x0+) ⊂I ).
If f (t) is continuous at x0,
then F (x) is differentiable
at x0 and
F (x0) = f (x0).
Proof. Consider
F (x0 + h)
−F (x0) =
x0+h
a
f (t) dt
− x0
a
f (t) dt
=
x0+hx0
f (t) dt.
Given > 0, since f (t) is continuous
at x0, we can find a δ > 0 such that if |t
− x0| < δ , then |f (t) − f (x0)| < . Hence
for each t ∈ (x0− δ, x0+ δ ), we have
(1.2) f (x0) − < f (t) < f (x0)
+ .
Let h be such that 0 < |h| < δ .
First note that,
F (x0 + h) − F (x0)h
= 1
h
x0+hx0
f (t) dt
and so by inequality (1.2) and theorem 1.3.9, we have that
(1.3) f (x0) − ≤ F (x0 + h) −
F (x0)h
≤ f (x0) + .
For all h satisfying 0 < |h| < δ ,
we can combine inequality (1.3) with inequality(1.2) (with t
= x0) to obtainF (x0 + h) − F (x0)h
− f (x0)
< .This implies that
F (x0) = limh→0 F (x
0 + h) − F (x0)h = f (x0)
and the proof is complete.
24
-
8/21/2019 Forrest Math148notes
26/199
Example 1.6. Let R+ = {x ∈ R : x > 0} =
(0, ∞). Let f : R+ → R be
definedby f (t) = 1t . Also, let
F : R
+
→R be defined by
F (x) =
x1
f (t) dt =
x1
1
t dt.
The first fundamental theorem of calculus shows that
F (x) = 1x for all x > 0.We
know that if H (x) = ln(x), then H (x)
= 1x for all x > 0. Let G(x)
=F (x) − H (x). Then
G(x) = F (x) − H (x) = 1x −
1
x = 0.
The mean value theorem shows that there exists a
C ∈ R such that G(x) = C for
all x > 0; however,
C = G(1) := F (1) − H (1) =
11
1t
dt − ln(1) = 0 − 0 = 0.
We conclude that
ln(x) =
x0
1
t dt
for all x ∈ R+.
Example 1.7. Evaluate ddx x0
et2
dt.
Note that et2
is continuous on R, and so the first fundamental theorem
of calculus shows that
d
dx x
0 e
t2
dt = e
x2
for all x ∈ R.
Example 1.8. Evaluate F (x), where
F (x) :=
x20
sin(t3) dt.
Let
H (u) :=
u0
sin(t3) dt,
then F (x) = H (x2), whence by the chain
rule, F (x) = H (x2) ddx
x2 = 2xH (x2).By the first fundamental theorem of
calculus, H (u) = sin(u3), and henceH (x2) =
sin(x6). We conclude that
F (x) = 2xH (x2) = 2x sin(x6).
25
-
8/21/2019 Forrest Math148notes
27/199
Example 1.9. Let F : R → R
be defined by
F (x) = x2x
sin(t3) dt.
Find F (x).Note that
F (x) =
x2x
sin(t3) dt
=
x2π
sin(t3) dt +
πx
sin(t3) dt
= x2
π
sin(t3) dt − x
π
sin(t3) dt,
and so by the fundamental theorem of calculus and the previous
example, wehave that
F (x) = 2x sin(x6) − sin(x3).
As seen from the previous examples, the first fundamental
theorem of cal-culus easily lends itself to the following
generalization.
Corollary 1.4.4. Assume that f (t),
g(x), and h(x) is defined on an
interval I . Also suppose that g(x)
and h(x) are both differentiable on the
interior of I ,
and that h(x)g(x) f (t) dt exists
for all x ∈ I . Define F
: I → R by F (x) :=
h(x)g(x)
f (t) dt.
Let x0 be in the interior
of I (i.e., there exists an
> 0 such that (x0−, x0+) ⊂I ).
If f (t) is continuous at x0,
then F (x) is differentiable
at x0 and
F (x0) = f (h(x0))h(x0) −
f (g(x0))g(x0).
Proof. This proof is left as an exercise. (Hint: Mimic
the procedure in theprevious examples.)
Recall the following definition.
Definition 1.4.5. Suppose that f (x) is
defined on an open interval containingan interval I . We
say that F (x) is
an antiderivative of f (x) on
I if F (x) = f (x)for
all x ∈ I .
26
-
8/21/2019 Forrest Math148notes
28/199
Example 1.10. If f (x) = x,
then F (x) = 12x2 is an antiderivative on
of f (x)
on R.
Observation. Recall that
if F (x), G(x) are continuous on an interval
[a, b] andare antiderivatives of f (x) on (a, b),
where a < b, then H (x) := F (x) −
G(x) issuch that H (x) = F (x) − G(x) for all
x ∈ (a, b). Since H (x) is continuous on[a, b],
the mean value theorem shows that H (x) =
C ∈ R is a constant for allx ∈ [a,
b]; therefore, all antiderivatives of f (x) on (a,
b) are of the form
F (x) + C.
Conversely, all such functions are antiderivatives
of f (x) on (a, b). Hence if wefind one
antiderivative of f (x) on (a, b), we have found
all of them. In general,if F (x) is an
antiderivative of f (x) on (a, b), we write
(1.4)
f (x) dx = F (x) + C.
The integral on the left side of (1.4) is called an
indefinite integral andrepresents the family of
antiderivatives of f (x) on (a, b). The
f (x) is, as before,called
the integrand and the dx refers to
the variable of (indefinite) integration .The following
theorem, the second fundamental theorem of calculus ,
relates theindefinite integral with the definite integral and
explains their similar notation.
Theorem 1.4.6 [Second Fundamental Theorem of
Calculus]. Assume that f (x) is
defined on an interval [a, b], a < b. Assume
that f (x) is continuous on
[a, b] and differentiable on (a, b).
If G(x) is continuous on [a, b]
and is an antiderivative of f (x)
on (a, b), then b
a
f (x) dx = G(b) − G(a).
Proof. First note that f (x) is integrable on
[a, b] by theorem 1.2.6. So let F :[a, b] → R
be defined by
F (x) =
xa
f (t) dt.
The first fundamental theorem of calculus shows that
F (x) = f (x) on (a, b);i.e., F (x) is
an antiderivative of f (x) on (a, b). In
observation 5, we noted (by
the mean value theorem) that G(x) = F (x)
+ C on [a, b] for some C ∈
R. We
27
-
8/21/2019 Forrest Math148notes
29/199
now have
G(b) − G(a) = [F (b) + C ] − [F (a) + C ]=
F (b) − F (a)
:=
ba
f (x) dx − aa
f (x) dx
=
ba
f (x) dx − 0
=
ba
f (x) dx,
as required.
Definition 1.4.7. Suppose f
: S → R with S ⊆ R.
If a, b ∈ S , then we definethe quantity
f (x)|ba as follows:
f (x)|ba := f (b) − f (a).With this
definition, the second fundamental theorem of calculus can be
rewritten as follows: ba
f (x) dx =
f (x) dx
ba
.
The second fundamental theorem allows us to compute exact
numeric valuesfor certain definite integrals. Let us return to the
first problem posed in thefirst section: What is the area bounded
by the curve y = x2 and the lines y =
0,x = 0, x = 1?
Problem. Find 10
x2 dx.
Solution. Note that
x2 dx = 13x3 + C is an
antiderivative. Let G(x) = 13x
3.By the second fundamental theorem of calculus, we have
that 1
0
x2 dx = G(x)|10 := G(1) − G(0)
= 1
3 − 0 = 1
3,
as expected.
Remark 1.4.8. Here is a list of common
antiderivatives. The integrands aredefined on their natural domains
and the antiderivatives are valid on thosedomains.
1.
c dx = cx + C ,
2.
xα dx = 1α+1xα+1 + C for all
α = −1,
28
-
8/21/2019 Forrest Math148notes
30/199
3.
x−1 dx =
1x dx = ln(|x|) + C ,
4. sin(x) dx = − cos(x) + C ,5.
cos(x) dx = sin(x) + C ,
6.
ex dx = ex + C ,
7. 1√ 1−x2 dx = arcsin(x) +
C ,
8. −1√ 1−x2 dx = arccos(x) +
C ,
9.
sec2(x) dx = tan(x) + C ,
10.
tan(x) dx = ln(| sec(x)|) + C ,11.
ln(x) dx = x(ln(x) − 1) + C .Proof. We will
check the last two items and leave the rest as exercises.10. Note
that
d
dx [ln(| sec(x)|) + C ] = 1| sec(x)| ·
d
dx| sec(x)|
+ 0
= 1
| sec(x)| ·
d
dx| sec(x)|
by the chain rule. For x ∈ −π2 + 2nπ, π2
+ 2nπ (n any natural number),sec(x) >
0, and so
1
| sec(x)| · d
dx | sec(x)| = 1
sec(x) · d
dx sec(x)
= 1
sec(x) · sec(x) tan(x)
= tan(x),
as claimed. The case where x ∈ π2 + 2nπ, 3π2
+ 2nπ is similar.11. Note that by the product
rule,
d
dx [x ln(x) − x + c] = 1 · ln(x) + x · 1
x − 1 + 0 = ln(x) + 1 − 1 = ln(x)
for all x > 0, as required.
Note that indefinite integration satisfy the linearity property
just as deriva-tives do. That is,
f (x) + g(x) dx =
f (x) dx +
g(x) dx and
c · f (x) dx =
c · f (x) dx, for all continuous
f (x), g(x) and c ∈ R. This is due to the
linearityof the derivative.
29
-
8/21/2019 Forrest Math148notes
31/199
1.5 Substitution and the Change of Variables
Theorem1.5.1 Substitution
Example 1.11. Evaluate
xex2
dx.
Observe that
xex2
dx = 12
(2x)ex2
dx = 12(ex2 + C 0) =
12e
x2 + C , where
C = 12C 0. To see this, note that the
chain rule shows ddx12
ex2
+ C = 12 · 2xex2
=
xex2
.
Observation. Suppose that f (x) and g(x)
are defined on an open interval I and differentiable on
I . Recall that the chain rule states
d
dx f (g(x)) = f (g(x))g(x),
valid on I . Now we have that d
dx f (g(x)) dx =
f (g(x))g(x) dx
and hence
f (g(x)) + C =
f (g(x))g(x) dx.
Also note that f (u) du =
f (u) + C.
Let u
= g
(x
); we get that f (g(x))g(x) dx =
f (g(x)) + C = f (u) +
C = f (u) + C =
f (u) du.
This suggests that if u = g(x), then
“du = g(x) dx.”
In this section, we will attempt to find antiderivatives by this
technique,known as (indefinite) integration by
substitution . It is, in essence, the chain rulebackwards.
Sample Question 1. Evaluate
2xex2
dx.
Strategy: We want to put this integral into the form
of f (g(x))g(x) dx.To do this, we try to
match each factor of 2xex2 to a factor of
f (g(x))g(x).The most promising match looks like
f (u) = eu with u = g(x) :=
x2, whereg(x) = 2x. In other words, we try to find a quantity in
the variable x—callit u—such that its
differential · · · dx absorbs most of the
difficult parts of theintegrand away into du; after this
“absorption,” what remains of the integral
30
-
8/21/2019 Forrest Math148notes
32/199
should be expressible in terms of the quantity u
only. With luck, whateverremains is easier to integrate.
In this question, if we choose our magic quantity to be
u = x2, then noticethat du = 2x dx
absorbs a large chunk of the integrand away into du, so
thatwhat remains is ex
2
du. Now ex2
is just eu, and so the integral turns into eu
du, a trivial integral. Usually, this magic quantity u
can be found inside
the integrand itself; in this case, it is found in the exponent
of e. Do not forget tore-express the result in terms of
the original variable by substituting the magicquantity u
back into the result.
Sample Solution 1. Let u = x2. We get
that du = 2x dx. After substitutingu = x2
and du = 2x dx into
2xex
2
dx, we get that
2xex2 dx = eu du = eu
+ C.We can now substitute u = x2 back into our
new antiderivative to get
2xex2
dx = eu + C = ex2
+ C.
Example 1.12. Evaluate
tan(x) dx := sin(x)cos(x)
dx. Let u = cos(x), whence
du = − sin(x) dx, or du− sin(x) = dx. Now
we have that
sin(x)cos(x) dx = sin(x)u
· du− sin(x)= −
1
u du
= −(ln(|u|) + C 0)= − ln(|u|) + C
(where C = −C 0)= ln
1
|u|
+ C
= ln
1cos(x)
+ C
= ln(| sec(x)|) + C.
Example 1.13. Evaluate
xx+1 dx.
31
-
8/21/2019 Forrest Math148notes
33/199
Note that
xx + 1 dx =
x + 1x + 1 dx − 1x +
1 dx
=
1 dx −
1
x + 1 dx.
We know that
1 dx = x + C 0. Now let u =
x + 1, whence du = dx and
1
x + 1 dx =
1
u du = ln(|u|) + C = ln(|x + 1|) +
C 1.
We conclude that x
x + 1 dx = (x + C 0) − (ln(|x + 1|) + C 1)
= x − ln(|x + 1|) + C,
where C = C 0 + C 1.
An alternate solution is to let u = x + 1
right away to obtain x
x + 1 dx =
u − 1
u du
=
1 − 1
u
du
=
1 du −
1
u du
= (u + C 0) − (ln(|u|) + C 1)= x − ln(|x + 1|)
+ 1 + C 0 − C 1= x − ln(|x + 1|) + C,
where C = 1 + C 0 − C 1.
Example 1.14. Evaluate
sec(θ) dθ.We make the not-so-trivial observation
that
sec(θ) dθ =
sec(θ)
sec(θ) + tan(θ)
sec(θ) + tan(θ)
dθ
=
sec2(θ) + sec(θ)tan(θ)
sec(θ) + tan(θ) dθ.(1.5)
We make the substitution u = sec(θ) + tan(θ), and
so du = [sec(θ)tan(θ) +sec2(θ)] dθ. Now note that the
entire numerator of 1.5 is absorbed into du andthe
entire denominator becomes u, so that we obtain
sec(θ) dθ = sec2(θ) + sec(θ)
tan(θ)
sec(θ) + tan(θ) dθ.
=
1
u du
= ln(|u|) + C = ln(| sec(θ) + tan(θ)|) + C.
32
-
8/21/2019 Forrest Math148notes
34/199
Example 1.15. Let f : [−1, 1] → R
be defined by f (x) = √ 1 − x2.
Evaluate f (x) dx =
1 − x2 dx,
valid on [−1, 1].The solution to this type of problem involves
an inverse trigonometric sub-
stitution , which will be explored in more detail in a
later section.Let θ = arcsin(x). Since
x ∈ [−1, 1], θ ∈ −π2 , π2
and so cos(θ) ≥ 0 on
this interval. We have that x = sin(θ), and so
dx = cos(θ) dθ. We now have
that√
1 − x2 =
1 − sin2(θ) =
cos2(θ) = | cos(θ)| = cos(θ). Putting thesetogether,
we have
1 − x2 dx =
cos(θ) cos(θ) dθ
=
cos2(θ) dθ
=
cos(2θ) + 1
2
= 1
2
cos(2θ) dθ +
1
2
1 dθ
= 1
2 · sin(2θ)
2 +
1
2θ + C
= 1
4
sin(2θ) + θ
2
+ C
= 1
4 sin(2 arcsin(x)) +
arcsin(x)
2 + C.
Checking, we have
d
dx
1
4 sin(2 arcsin(x)) +
arcsin(x)
2 + C
=
1
4 cos(2 arcsin(x)) · 2√
1 − x2 + 1
2√
1 − x2=
1
2√
1 − x2 (cos(2 arcsin(x)) + 1) dθ
= 1
2
√ 1 − x2 2cos
2(arcsin(x))
−1 + 1
= 1√
1 − x2 cos2(arcsin(x)).(1.6)
But observe that
cos2(arcsin(x)) + x2 = cos2(arcsin(x)) + sin2(arcsin(x)) =
1,
33
-
8/21/2019 Forrest Math148notes
35/199
and socos2(arcsin(x)) = 1
−x2.
Continuing from (1.6) above, we have that
d
dx
1
4 sin(2 arcsin(x)) +
arcsin(x)
2 + C
=
1√ 1 − x2 · (1 − x
2)
=
1 − x2,and we are done.
1.5.2 Change of Variables Theorem
How does substitution work for definite integrals? What happens
to the boundsof integration after we attempt to make a
substitution?
Definition 1.5.1. Suppose g(x) is defined on
an interval [a, b]. We say thatg(x) is continuously
differentiable on [a, b] if g(x) is
differentiable on (a, b), g (x)is continuous on (a, b), and
the one-sided limits limx→a+ g(x) and limx→b− g(x)exist.
Theorem 1.5.2 [Change of Variables]. Assume
that g(x) is defined and continuous on an
interval [a, b], a < b. Suppose also
that g(x) is continuously differentiable
on [a, b]. Suppose also that f (x)
is defined and continuous on g([a, b]). Then
b
a
f (g(x))g(x) dx = g(b)
g(a)
f (u) du,
where g(x) has been extended continuously
to [a, b].
Proof. Note that g([a, b]) is a closed, bounded
interval by the extreme valuetheorem. Also note that theorem 1.2.6
shows that f (u) is integrable on [a, b];let
F : I → R be defined by
F (t) =
tg(a)
f (u) du.
By the first fundamental theorem of calculus, F (t)
is differentiable on I ⊃g([a, b]) with
F (t) = f (t) on I ⊃ g([a,
b]). Let H : [a, b] → R be defined by
H (x) = F (g(x)) = g(x)
g(a)
f (u) du.
Since g(x) is differentiable on (a, b), the chain rule
shows that for all x ∈ (a, b),we have that
H (x) = F (g(x))g(x)=
f (g(x))g(x).
34
-
8/21/2019 Forrest Math148notes
36/199
That is, H (x) is an antiderivative
of f (g(x))g(x) on (a, b). Extend g(x)
con-tinuously to [a, b] so that f (g(x))g(x) is now
continuous on [a, b].
Note that H (x) = F (g(x)) is continuous on
[a, b]. To see this, first note thatg(x) is continuous on [a, b].
Next, note that by the extreme value theorem, f (x)is
bounded on g([a, b]), whence corollary 1.4.2 shows that
F (t) is (uniformly)continuous on g([a, b]). The
composition of F (t) with g(x) will
therefore becontinuous on [a, b].
All conditions of the second fundamental theorem of calculus are
now satis-fied. By that theorem,
H (b) − H (a) = ba
f (g(x))g(x) dx;
however, we also have
H (b) − H (a) := g(b)g(a)
f (u) du − g(a)g(a)
f (u) du
=
g(b)g(a)
f (u) du.
We conclude that ba
f (g(x))g(x) dx = g(b)g(a)
f (u) du.
Example 1.16. Evaluate e2e 1x
ln(x) dx.Let g(x) = ln(x). Then g (x) = 1x
; the change of variables theorem and the
second fundamental theorem of calculus show that
e2e
1
x ln(x) dx =
g(e2)g(e)
1
u du
=
ln(e2)ln(e)
1
u du
=
21
1
u du
= ln(
|u
|)
|21
= ln(2) − ln(1)= ln(2).
35
-
8/21/2019 Forrest Math148notes
37/199
1.6 Integration by Parts
Recall that the product rule states that
d
dx f · g =
df
dx
· g +
dg
dx
· f
= f (x)g(x) + g(x)f (x).
Hence for differentiable functions f (x) and g
(x), we have that
f (x)g(x) + C =
d
dx (f (x)g(x)) dx =
f (x)g(x) dx +
g(x)f (x) dx,
and thus we get the integration by parts
formula
g(x)f (x) dx = f (x)g(x) −
f (x)g(x) dx.
(Or equivalently, we can write it this way:
f (x)g(x) dx = f (x)g(x) −
g(x)f (x) dx.)
The constant C is accounted for by the
indefinite integration sign.Just as integration by substitution was
the reversal of the chain rule, this
technique is the reversal of the product rule.
Sample Question 2. Evaluate
xex dx.
Strategy: We want to rid the integrand of the x.
Integration by parts is ideal for
this maneuver. Our way of removing the x is to
differentiate it “downwards” toproduce the constant 1. As a
compensation, we must integrate the other factorex “upwards”;
however, integrating ex is not difficult at all. The
integration byparts formula tells us that
xex dx = xex −
1ex dx = xex − ex + C = (x − 1)ex +
C.
Sample Solution 2. Let f (x) = x, g
(x) = ex. Then f (x) = 1 and g (x) =
ex.Integrating by parts, we have
xex dx =
f (x)g(x) dx = f (x)g(x)
−
f (x)g(x) dx
= xex − 1ex dx= xex − ex + C =
(x − 1)ex + C.
36
-
8/21/2019 Forrest Math148notes
38/199
Sample Question 3. Evaluate
x2 sin(x) dx.
Strategy: As before, the integrand is a product of two
factors, one of whichis easy to remove by bringing it “downwards”
by differentiation. On the otherhand, we must bring the other
factor, sin(x), “upwards” by integration. Inte-grating sin(x) is
not difficult. Once we are done, we end up with this
integral:
2x(− cos(x)) dx.
There are still two factors in the integrand. It looks like we
need to apply thesame technique one more time: We differentiate 2x
“downwards” and integrate− cos(x) “upwards” again, finally
eliminating the original factor x2. We get
2(− sin(x)) dx.This integral is easy to
evaluate.
Sample Solution 3. Let f 1(x) = x2 and
g1(x) = − cos(x). Then f 1(x) = 2x
and g 1(x) = sin(x). Integrating by parts, we
get x2 sin(x) dx =
f 1(x)g
1(x) dx = f 1(x)g1(x) −
f 1(x)g1(x) dx
= x2(− cos(x)) −
2x(− cos(x)) dx.
Let f 2(x) = 2x and g2(x) = −
sin(x). Then f 2(x) = 2 and g2(x) = −
cos(x).Integrating by parts again, we get
2x(− cos(x)) dx =
f 2(x)g2(x) dx = f 2(x)g2(x)
−
f 2(x)g2(x) dx
= 2x(− sin(x)) − 2 − sin(x) dx
= −2x sin(x) − 2 cos(x) + C 0.
Putting these together, we have x2 sin(x) dx
= x2(− cos(x)) −
2x(− cos(x)) dx
= −x2 cos(x) − [−2x sin(x) − 2cos(x) + C 0]=
−x2 cos(x) + 2x sin(x) + 2 cos(x) + C
(where C = −C 0).
Sample Question 4. Evaluate
ex sin(x) dx.
37
-
8/21/2019 Forrest Math148notes
39/199
Strategy: It does not appear that we can eliminate any of
the two factorsthrough integration or differentiation, because
ex and sin(x) never vanish after
some differentiation or integration; however, we can use this
fact to our advan-tage. Note that ex is “invariant” under
integration and sin(x) is “cyclic” underdifferentiation. That
is, ex does not change when integrated, and sin(x) first
be-comes cos(x) and then becomes − sin(x) when differentiated.
To demonstrate,after the first integration by parts, our integral
transforms into
ex cos(x) dx.
After the second, we get ex(− sin(x)) dx =
−
ex sin(x);
we got back the negative of our original integral. This means we
can write theintegral in question in terms of itself and the other
items generated along theway, whence we do some algebra.
Observe the sample solution below.
Sample Solution 4. Let f 1(x) = sin(x) and
g(x) = ex. Then f 1(x) = cos(x)
and g (x) = ex. Integrating by parts, we
get ex sin(x) dx =
g(x)f 1(x) dx = g(x)f 1(x)
−
g(x)f 1(x) dx
= ex sin(x) −
ex cos(x) dx.
Let f 2(x) = cos(x). Then f 2(x) = −
sin(x). Integrating by parts again, we get
ex cos(x) dx =
g(x)f 2(x) dx = ex cos(x) −
g(x)f 2(x) dx
= ex cos(x) −
ex(− sin(x)) dx
= ex cos(x) +
ex sin(x) dx.
Putting these together, we get
ex sin(x) dx = ex sin(x) −
ex cos(x) dx
= ex sin(x) − [ex cos(x) +
ex sin(x) dx]
= ex sin(x) − ex cos(x) −
ex sin(x) dx.
38
-
8/21/2019 Forrest Math148notes
40/199
Moving
ex sin(x) dx to the left side, we obtain
ex sin(x) dx +
ex sin(x) dx = ex sin(x) − ex
cos(x),
which implies
2 ·
ex sin(x) dx = ex sin(x) − ex cos(x) +
C 0.
We conclude that ex sin(x) dx =
ex sin(x) − ex cos(x)2
+ C
(where C = C 02 ).
Example 1.17. Evaluate
ln(x) dx (valid on (0, ∞)).There is an invisible
second factor in the integrand: 1 · ln(x). With this
insight, we let f (x) = x and
g(x) = ln(x). Then f (x) = 1 and g(x) =
1x .Integrating by parts, we get
ln(x) dx =
f (x)g(x) dx = f (x)g(x)
−
g(x)f (x) dx
= x ln(x) −
1
x · x dx
= x ln(x) −
1 dx
= x ln(x) − x + C.Checking, we have that
d
dx [x ln(x) − x + C ] = 1 · ln(x) + x · 1
x − 1 + 0 = ln(x) + 1 − 1 = ln(x).
This indefinite integral is valid on (0, ∞), as required.
Example 1.18. Evaluate
arctan(x) dx.Using the same technique, we try to eliminate
arctan(x) by differentiation,
while at the same time integrating the invisible factor 1. Let
f (x) = x andg(x) = arctan(x). Then
f (x) = 1 and g(x) = 11+x2 . Integrating by
parts, we
obtain arctan(x) dx =
f (x)g(x) dx = f (x)g(x)
−
f (x)g(x) dx
= x arctan(x) −
x
1 + x2 dx.
39
-
8/21/2019 Forrest Math148notes
41/199
Making the substitution u = 1 + x2, we find
du = 2x dx and so we now have
x1 − x2 dx = 12
2x1 − x2 dx
= 1
2
1
u du
= 1
2 ln(|u|) + C 0
= 1
2 ln(|1 + x2|) + C 0.
Putting these together, we have that arctan(x) dx
= x arctan(x) −
x
1 + x2 dx
= x arctan(x) − 12
ln(|1 + x2|) + C 0= x arctan(x) − 1
2 ln(|1 + x2|) + C
(where C = −C 0).Below are some indefinite
integrals that integration by parts will solve par-
ticularly well:
• arcsin(x) dx,•
arccos(x) dx,
• xn sin(x) dx,• xn cos(x) dx,•
xnex dx,• cos(x)ex dx,•
sin(x)ex dx.
1.7 Partial Fractions
In this section, we will look at how we would integrate rational
functions—
functions of the form f (x) = p(x)
q(x)
, where p(x) and q (x)= 0 are both
polynomi-
als.
Problem. Evaluate 1x2−1 dx.
40
-
8/21/2019 Forrest Math148notes
42/199
Solution. Note that
1x2 − 1 dx =
1(x + 1)(x − 1) dx,
and so if there exists some A, B ∈ R
such that 1(x+1)(x−1) = Ax+1 +
Bx−1 , thenwe would have
1
x2 − 1 dx =
1
(x + 1)(x − 1) dx
=
A
x + 1 +
B
x − 1
dx
=
A
x + 1 dx +
B
x − 1 dx= A ln(
|x + 1
|) + B ln(
|x
−1|) + C.
Do such A and B exist? To find them, we
write
(1.7) 1
(x + 1)(x − 1) = A
x + 1 +
B
x − 1 = A(x − 1) + B(x + 1)
(x + 1)(x − 1) ,
whence1 = A(x − 1) + B(x + 1).
Setting x = 1, we obtain 1 = 2B, which means
B = 12 . Setting x = −1, weobtain 1
= −2A, which means A = −12 . Note
that this method is not yet
justified yet, since we would be dividing by 0 if we set
x = 1 or x =
−1 at
equation (1.7); however, we can justify this procedure in many
ways, and weleave the details as an exercise. Of course, we can
always just check that the Aand B does indeed
satisfy (1.7):
−12
x + 1 +12
x − 1 =−12 (x − 1) + 12(x + 1)
(x + 1)(x − 1) =−12 x + 12 + 12x
+ 12
(x + 1)(x − 1) = 1
x2 − 1 .
The solution above therefore yields 1
x2 − 1 dx = A ln(|x + 1|) + B ln(|x − 1|) +
C
= −1
2 ln(|x + 1|) + 1
2 ln(|x − 1|) + C.
So the general problem is the following.
Problem. Evaluate p(x)
q(x) dx, where p(x) and q (x) are
polynomials (q (x) is not
the zero polynomial).
41
-
8/21/2019 Forrest Math148notes
43/199
Definition 1.7.1. Given a polynomial p(x) =
a0 + a1x + a2x2 + · · · + anxn,
where n
≥1 and an
= 0, n is called the degree
of p(x) (notation: deg( p(x)) = n).
For p(x) = 0, we define deg( p(x)) := −∞.To simplify
the problem, we make the following assumptions and observa-
tions.
1. Without loss of generality, we will assume that
deg( p(x)) < deg(q (x)), forotherwise we
could use polynomial division to write
p(x) = p1(x) + p2(x)
q (x) ,
where deg( p2(x)) < deg(q (x)).
Integrating p1(x) is simple, and so theproblem reduces to
the case where deg( p(x)) < deg(q (x)).
2. By the fundamental theorem of algebra , given any
polynomial q (x), we canwrite
q (x) = a(q 1(x))m1(q 2(x))
m2 · · · (q k(x))mk ,where each q i(x) =
x − ai for some ai ∈ R or
q i(x) = x2 + bix + ci forsome
bi, ci ∈ R, where q i(x) is
irreducible. We will assume without lossof generality that a
= 1, so that q (x) is monic. Also, p(x) and
q (x) shareno common factors.
1.7.1 Type I Rational Functions
Definition 1.7.2. A rational function
f (x) = p(x)q(x) is said to be type
I if p(x)
and q (x) are polynomials satisfying
1. deg( p(x)) < deg(q (x)),
2. p(x) = 0 implies q (x) = 0, and3.
q (x) = (x − a1)(x − a2) · · · (x − ak) with
ai = aj if i = j .
Example 1.19. f (x) = 1x2−1
= 1(x+1)(x−1) is type I.
Remark 1.7.3. If f (x) =
p(x)q(x) is type I, then there exists constants
A1, A2, . . .,
Ak such that
(1.8) f (x) = A1
x − a1 + A2
x − a2 + · · · + Ak
x − ak ,
where q (x) = (x − a1)(x − a2) · · · (x − ak). The
quantity on the right side of (1.8) is called the
partial fraction decomposition of f (x).
Proof. This proof is omitted.
42
-
8/21/2019 Forrest Math148notes
44/199
With the constants A1, A2, . . ., Ak
described above, we have
f (x) dx =
A1x − a1 +
A2x − a2 + · · · +
Akx − ak
dx
=
A1
x − a1 dx +
A2
x − a2 dx + · · · +
Ak
x − ak dx= A1 ln(|x − a1|) + A2 ln(|x − a2|) +
· · · + Ak ln(|x − ak|) + C.
(1.9)
To find A1, A2, · · · , Ak, we multiply
both sides of (1.8) by
q (x) = (x − a1)(x − a2) · · · (x − ak)
to get
p(x) =
ki=1
Ai kj=1j=i
(x − aj) .
Setting x = am for m = 1, 2,
. . . , k yields
p(am) = Am
kj=1j=m
(am − aj).
Note thatk
j=1j=m
(am − aj) = 0;
therefore, we conclude that
Am = p(am)
C m
where
C m =k
j=1j=m
(am − aj),
for each m = 1, 2, . . . , k.
Example 1.20. Evaluate
x(x−1)(x−3) dx.
We write
x
(x − 1)(x − 3) = A
x − 1 + B
x − 3⇒ x = A(x − 3) + B(x − 1).
43
-
8/21/2019 Forrest Math148notes
45/199
Setting x = 1, we get that 1 = A(−2), which
means A = −12 . Setting x = 3,
weget that 3 = B (2), which means B = 32 .
Hence
x
(x − 1)(x − 3) dx = −12
x − 1 dx + 32
x−3x − 3 dx
= −1
2 ln(|x − 1|) + 3
2 ln(|x − 3|) + C.
1.7.2 Type II Rational Functions
Definition 1.7.4. A rational function
f (x) = p(x)q(x) is said to be type
II if p(x)
and q (x) are polynomials satisfying
1. deg( p(x)) < deg(q (x)),
2. p(x) = 0 implies q (x) = 0,3.
q (x) = (x − a1)m1(x − a2)m2 · · · (x − ak)mk
with ai = aj if i = j ,4.
mi ≥ 1 for all i = 1, 2, . . . k, and5.
mi > 1 for some i = 1, 2, . . .
k.
In this case, one can show that f (x) =
p(x)q(x) has a partial fraction decompo-
sition where each term (x − aj)mj of q (x)
contributes mj terms of the formAj,1
x − aj+
Aj,2
(x − aj)2
+ Aj,3
(x − aj)3
+
· · ·+
Aj,mj
(x − aj)mj
to the decomposition.Integrating this type of rational functions
is very similar to integrating those
of type I. We give an example below.
Example 1.21. Evaluate 1x2(x+1)
dx.
Here, q (x) = x2(x + 1), making
1x2(x+1) a type II rational function; the x2
will contribute two terms to the decomposition while the (x + 1)
will contributeone term:
1
x2(x + 1) =
A1,1
x +
A1,2
x2 +
A2,1
x + 1
:= A
x +
B
x2 +
C
x + 1.(1.10)
To find A, B , and C , we multiply the
entire equation by q (x) = x2(x +1) to get
(1.11) 1 = Ax(x + 1) + B(x + 1) + Cx2.
44
-
8/21/2019 Forrest Math148notes
46/199
Letting x = 0, we get that 1 = 0 + B · 1 + 0 =
B . Letting x = −1, we obtain1 = 0 + 0 +
C
·1 = C . Finally, we find A by comparing
coefficients in equation
(1.11):
1 = Ax2 + Ax + Bx + B + Cx2 = (A + 1)x2 + (A + 1)x +
1
⇒ 0 = (A + 1)x2 + (A + 1)x⇒ 0x2 = (A + 1)x2⇒
0 = A + 1⇒ A = −1.
After checking, we find that this combination of A,
B, and C satisfies (1.10).We therefore
have that
1
x2
(x + 1)
dx =
− 1
x
dx + 1
x2
dx + 1
x + 1
dx
= − ln(|x|) − 1x
+ ln(|x + 1|) + C.
1.7.3 Type III Rational Functions
Definition 1.7.5. A rational function
f (x) = p(x)q(x) is said to be type
III if p(x)
and q (x) are polynomials and f (x) is
neither type I nor type II. That is, f (x)satisfies
1. deg( p(x)) < deg(q (x)),
2. p(x) = 0 implies q (x) = 0,3.
q (x) is of the form
q (x) =
(x2 + b1x + c1)m1(x2 + b2x + c2)
m2 · · · (x2 + blx + cl)ml×
[(x − a1)ml+1(x − a2)ml+2 · · · (x − ak)ml+k ]
with 0 < l ≤ k and mi > 0 for
all i = 1, 2, . . . , l + k,4.
ai = aj if i = j , for l ≤
i, j ≤ k,5. (bi, ci) = (bj , cj) if i
= j , for 1 ≤ i, j ≤ l,6. (x2 + bix + ci) is
irreducible for all i ∈ {1, 2, . . . , l}, and7. (x2 + bix +
ci) is not a polynomial factor of p(x) for any i ∈
{1, 2, . . . , l}.Essentially, type III rational functions have at
least one irreducible quadratic
factor in their denominators. One can show that each term (x2+
bjx + cj)mj of
45
-
8/21/2019 Forrest Math148notes
47/199
q (x) will contribute mj terms to the partial
fraction decomposition of f (x) asfollows:
Aj,1x + Bj,1x2 + bjx + cj
+ Aj,2x + Bj,2(x2 + bjx + cj)2
+ Aj,3x + Bj,3(x2 + bjx + cj)3
+ · · · + Aj,mjx + Bj,mj(x2 + bjx + cj)mj
.
The linear factors of q (x) contribute terms to
the decomposition in the samemanner as before.
Example 1.22. Suppose that f (x) =
p(x)q(x) is a type III rational function where
q (x) = x(x2 + 1)2. Its partial decomposition takes
the form
p(x)
q (x) =
A1
x +
A2x + B2x2 + 1
+ A3x + B3(x2 + 1)2
.
Once we find the constants in the decomposition, we begin
integrating. Thelinear terms are integrated as before; the
quadratic terms are handled by thefollowing simple fact.
Example 1.23. 1x2+1 = arctan(x) +
C .
¿From this, we can solve the following.
Example 1.24. Evaluate
1x2+x+1 dx.
Note that this type III rational function is already in its
decomposition. We
first complete the square: x2+ x + 1 = x + 122+
34 . Then, we factor the 34 outto get
x2 + x + 1 = 3
4
4
3
x +
1
2
2+ 1
,
and so we get1
x2 + x + 1 =
4
3 · 1 2√ 3
x + 12
2+ 1
.
Let u = 2√ 3
x + 12
, so that du = 2√
3 dx ⇒ dx =
√ 32
du. Integrating, we get
1x2 + x + 1 dx = 4
3 · 1 2√ 3 x + 122 + 1
dx
= 4
3 ·
1
u2 + 1 ·
√ 3
2 du
46
-
8/21/2019 Forrest Math148notes
48/199
= 4
3 ·
√ 3
2 1
u2 du
= 2√
3· (arctan(u) + C 0)
= 2√
3· arctan
2√
3
x +
1
2
+ C.
In general, we get the following.
Example 1.25. Evaluate 1
x2+bx+c dx, where b2 − 4c < 0 (i.e.,
x2 + bx + c is
irreducible).Note that we can do the same algebra as the
previous example to obtain
1
x2 + bx + c =
1
D
1 1√ D
x + b2
2+ 1
,where D = c − b24 > 0. Making
the substitution u =
1√ D
x + b2
, we get that
du = 1√ D
dx ⇒ dx = √ D du, and so 1
x2 + bx + c dx =
1
D ·
1 1√ D
x + b2
2+ 1
dx
= 1
D ·
1
u2 + 1 ·
√ D du
=√ D
D ·
1
u2 + 1 du
= 1√
D(arctan(u) + C 0)
= 1√
Darctan
1√
D
x +
b
2
+ C.
We have found the general formula 1
x2 + bx + c dx =
1√ D
arctan
1√
D
x +
b
2
+ C,
where D = c − b2
4 > 0.We now look at how we would integrate an
irreducible quadratic term with
a linear polynomials as its numerator.
Example 1.26. Evaluate
xx2+1 dx.
47
-
8/21/2019 Forrest Math148notes
49/199
Let u = x2 + 1; then du = 2x dx ⇒ x
dx = du2 . Integrating, we have
x
x2 + 1 dx =
1u · du
2
= 1
2
1
u du
= 1
2(ln(|u|) + C 0)
= 1
2 ln(|x2 + 1|) + C.
Example 1.27. Evaluate
x+1x2+1 dx.
We first break this up into a sum of two integrals:
x + 1
x2 + 1 dx =
x
x2 + 1 dx +
1
x2 + 1 dx,
both of which we have already integrated in previous examples.
We get that x + 1
x2 + 1 dx =
1
2 ln(|x2 + 1|) + arctan(x) + C.
Example 1.28. Evaluate
xx2+x+1 dx.
We again break this up into two integrals, keeping in mind that
the substi-tution u = x2 + x + 1 has
differential du = (2x + 1) dx
⇒ du
2 = x + 12 dx. Wehave
x
x2 + x + 1 dx =
x + 12x2 + x + 1
dx +
−12x2 + x + 1
dx
=
1
u · du
2 − 1
2 ·
1
x2 + x + 1 dx
= 1
2 ln(|u|) − 1√
3· arctan
2√
3
x +
1
2
+ C
= 1
2 ln(|x2 + x + 1|) − 1√
3arctan
2√
3
x +
1
2
+ C.
We now have an algorithm to integrate every irreducible
quadratic term of the type Ax+Bx2+bx+c . But what about
the terms of the form
Ax+B(x2+bx+c)n , where
n > 1? We can break this up into two
integrals Ax + Ab2(x2 + bx + c)n
dx +
b − Ab
2
·
1
(x2 + bx + c)n dx.
48
-
8/21/2019 Forrest Math148notes
50/199
Here, we deliberately made the first integral easy to integrate:
simply let u =x2 + bx + c and we get du
= (2x + b) dx
⇒ A2 du = Ax + Ab2 dx. The
integralon the left now becomes the easy integral
1
un · A
2 du =
A
2 ·
1
un du.
The integral on the right is the more difficult one, and it
would require techniquesfrom the next section to solve.
1.8 Inverse Trignometric Substitutions
Problem. Evaluate 1(x2+1)2
dx.
Solution. Here, we make the substitution θ =
arctan(x) ⇒ x = tan(θ). Weget that dx
= sec2(θ) dθ and as a result
1
(x2 + 1)2 dx =
sec2(θ)
(tan2(θ) + 1)2 dθ
=
sec2(θ)
(sec2(θ))2 dθ
=
1
sec2(θ) dθ
=
cos2(θ) dθ
= cos(2θ)2 + 12 dθ=
1
2 · sin(2θ)
2 +
θ
2 + C
= 1
4(sin(2θ)) +
θ
2 + C,
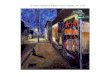
since cos2(θ) = cos(2θ)+12 . Recall that x
= tan(θ); from figure 1.1, we can see
1
1+x 2
x
θ
Figure 1.1: The subtitution θ = arctan(x).
49
-
8/21/2019 Forrest Math148notes
51/199
that sin(θ) = x√ x2+1
and cos(θ) = 1√ x2+1
. Then sin(2θ) = 2sin(θ) cos(θ) =2x
x2
+1. We therefore have
1
(x2 + 1)2 dx =
1
4(sin(2θ)) +
θ
2 + C =
x
2(x2 + 1) +
1
2 arctan(x) + C.
The substitution θ = arctan(x) is called an
inverse trigonometric substitu-tion , or simply an inverse
trig substitution. If we rewrite this particular substitu-tion
as x = tan(θ) and then take advantage of the identity
sec2(θ) = 1+ tan2(θ),we can evaluate many similar integrals.
Note. If the integrand has terms of the form (a2x2 +
b2)α, then make thesubstitution θ = arctanaxb
⇒ ax = b tan(θ). Use the substitution
ax =b tan(θ) to obtain
(a2x2 + b2)α = (b2 tan2(θ) + b2)α = b2α(tan2(θ) + 1)α
= b2α(sec2(θ))α.
Example 1.29. One should make the θ =
arctan x substitution to evaluate
1√ x2+1
dx.
Problem. Evaluate the definite integral
1
−1√
1 − x2 dx.
Solution. Here, we make the substitution θ =
arcsin(x) ⇒ x = sin(θ). Thendx = cos(θ) dθ,
valid on
−π2
, −π2
. Note that cos(θ) ≥ 0 on that interval. We
now have, by the change of variables theorem, that
1−1
1 − x2 dx =
arcsin(1)arcsin(−1)
1 − sin2(θ) · cos(θ) dθ
=
π2
−π2
cos2(θ) · cos(θ) dθ
=
π2
−π2
| cos(θ)| cos(θ) dθ
= π2
−π2
cos(θ) · cos(theta) dθ
=
π2
−π2
cos2(θ) dθ.
50
-
8/21/2019 Forrest Math148notes
52/199
We now use the fact that cos2(θ) = cos(2θ)+12
= cos(2θ)2 + 12 to get
π2−π2
cos2(θ) dθ = 12 · π2−π2
cos(2θ) dθ + π2−π2
12
dθ
= sin(2θ)
4
π2
−π2
+ θ
2
π2
−π2
=
π
4 − −π
4
+
sin
2 · π2
4
− sin
2 · −π2
4
= π
2 + (0 − 0)
= π
2.
We get that the area of the semicircle of radius 1 is
π
2 .The above solution demonstrates another inverse trig
substitution: θ =
arcsin(x). This substitution is used so that we could take
advantage of theidentity 1 − sin2(x) = cos2(x).
Note. If the integrand has terms of the form (b2 −
a2x2)α, then make thesubstitution θ = arcsin
axb
⇒ ax = b sin(θ). Use the substitution ax =
b sin(θ)to obtain
(b2 − a2x2)α = (b2 − b2 sin2(θ))α = b2α(1 − sin2(θ))α
= b2α(cos2(θ))α.
Problem. Evaluate 1√ x2−1 dx.
Solution. Here, we make the substitution θ =
arcsec(x) ⇒ x = sec(θ). Thendx = sec(θ)
tan(θ) dθ, valid on
0, π2
. Now tan(θ) ≥ 0 on that interval; hence,
we have that 1√
x2 − 1 dx =
sec(θ) tan(θ) sec2(θ) − 1 dθ
=
sec(θ) tan(θ)√
tan2 θdθ
= sec(θ) tan(θ)
tan θ dθ
=
sec(θ) dθ
= ln(| sec(θ) + tan(θ)|) + C.
51
-
8/21/2019 Forrest Math148notes
53/199
Recall that x = sec(θ); from the fact that tan(θ)
=√
sec2 θ − 1 = √ x2 − 1, weget
1√ x2 − 1 dx = ln(| sec(θ) + tan(θ)|) +
C = ln
x + x2 − 1 + C.
The above solution demonstrates the use of the substitution
θ = arcsec(x).It is most often used in conjunction with
the identity sec2(x) − 1 = tan2(x).
Note. If the integrand has terms of the form (a2x2 −
b2)α, then make thesubstitution θ = arcsec
axb
⇒ ax = b sec(θ). Use the substitution ax =
b sec(θ)to obtain
(a2
x2
− b2
)α
= (b2
sec2
(θ) − b2
)α
= b2α
(sec2
(θ) − 1)α
= b2α
(tan2
(θ))α
.
With these techniques, we can now integrate any rational
function f (x) = p(x)q(x) (where
q (x) is not the zero polynomial).
1.9 Applications of the Integral
1.9.1 Area Between Curves
Problem. Let R be the region bounded by the
graphs of f (x) and g(x) andthe lines
x = a and x = b. Suppose
that f (x) and g(x) are continuous on [a, b].
Find the area A of region R (figure
1.2).
g x( )
f x( )
x
y
a bR
Figure 1.2: Area between curves.
For convenience, we will in the future say that the region
R is bounded by (the graphs of)
f (x) and g(x) on [a,
b].
52
-
8/21/2019 Forrest Math148notes
54/199
Solution. We find A in three steps.
1. We begin by partitioning the interval [a, b] using
P := {xi : a = x0 <
x1 < · · · < xi−1 < xi < · · · <
xn = b}.Let Ri be the subregion
of R bounded by the graphs of y =
g(x) y = f (x)
g x( )
f x( )
x
y
a bxi-1 xi
Ri
Figure 1.3: Partitioning R into subregions.
on [xi−1, xi]. Let Ai be the area of
Ri. Then A = n
i=1Ai. Figure 1.3shows this step.
2. We estimate each Ai with the area of a rectangle
with its base on [xi−1, xi]and its top and bottom on the lines
y = max{g(xi), f (xi)} and y
=min{g(xi), f (xi)}, respectively. This rectangle has
width ∆xi := xi−xi−1and height
|g(xi)
−f (xi)
|. Thus,
Ai ≈ |g(xi) − f (xi)|∆xi,so that
A =n
i=1
Ai ≈n
i=1
|g(xi) − f (xi)|∆xi.
3. If f (x) and g(x) are continuous on [a,
b] and if P n is the n-regular partition,then
letting n → ∞ gives
A = limn→∞
ni=1
Ai
= limn→∞
ni=1
ga + i b − an − f a + i b − an · b − an=
ba
|g(x) − f (x)| dx,
where the last equality is given by corollary 1.2.10.
53
-
8/21/2019 Forrest Math148notes
55/199
The above solution can be used as the
definition of the area bounded by
(the graphs
of) f (x) and g(x) on [a,
b], where f (x) and g(x) are continuous
functions.
If f (x) and g(x) intersect at least twice
and at most a finite number of times,then we can define the
area bounded by (the graphs of) f (x)
and g(x) as thearea bounded by f (x)
and g(x) on [c, d], where x = c is the
leftmost point wherethe two functions intersect and d
is the rightmost point where the two functionsintersect.
Example 1.30. Let f (x) = x,
g(x) = x3. Find the area bounded by f (x)
andg(x).
Since we are not given bounds a and b, we
are finding the total boundedarea. We note that f (x) =
x and g(x) = x3 intersect three times: at
x = −1,at x = 0, and at x
= 1. To see this, note that x = x3 implies
that x3− x = 0 ⇒x(x + 1)(x
−1) = 0. Let A be the area bounded by the two
graphs. Then we
have that
A =
1−1
x3 − x dx=
0−1
x3 − x dx + 10
x3 − x dx=
0−1
(x3 − x) dx + 10
(x − x3) dx
=
x4
4 − x2
2
0−1
+
x2
2 − x4
4
10
(1.12)
= 1
4
+ 1
4=
1
2.
Equality (1.12) is due to the second fundamental theorem of
calculus.
1.9.2 Moments and Centers of Mass
Informal definition. A moment is the
product of the mass of an object timesthe “directed” distance from
a fixed point.
Assume that R is a region in R2 bounded by
f (x) and g(x) on [a, b] withf (x) ≤ g(x)
on [a, b]. Assume that f (x) and g (x) are
continuous on [a, b]. Alsoassume that the region R
has area A and represents a thin plate of
uniformdensity ρ and uniform thickness t. Then the
mass of the plate, m, is given by
m = ρtA.
Without loss of generality, we may assume that the constant
ρt is equal to 1, sothat
m = A =
ba
(g(x) − f (x)) dx.
54
-
8/21/2019 Forrest Math148notes
56/199
Problem. Find the moment of R relative to
the y -axis.
Solution. As before, we first partition the interval [a,
b] into n subintervalsusing
P := {xi : a = x0 <
x1 < · · · < xi−1 < xi < · · · <
xn = b}This subdivides R into n
regions Ri, i = 1, 2, . . . , n. The
moment M i associatedwith the region Ri
is approximately
M i ≈ mici = ci(g(ci) −
f (ci))∆xi,
where ci = xi−1+xi2 represents the
“x center,” or the “average distance from the
y-axis,” of the rectangle with its base on [xi−1, xi] and its
top and bottom atg(ci) and f (ci), respectively;
mi = (g(ci) − f (ci))∆xi is the area, which is
themass, of this rectangle. The total moment of R
relative to the y-axis , M x, is
the
sum of the individual moments
M x =n
i=1
M i ≈n
i=1
ci(g(ci) − f (ci))∆xi.
(See figure 1.4.) Letting n → ∞ gives
g x( )
f x( )
x
y
a bxi-1 xi
g( )ci
f ( )ci
ci
Figure 1.4: ci gives the shaded rectangle’s
“average distance” from the y -axis.
55
-
8/21/2019 Forrest Math148notes
57/199
M x = limn
→∞
n
i=1M i
= limn→∞
ni=1
ci(g(ci) − f (ci))∆xi
=
ba
x(g(x) − f (x)) dx.
The last equality is due to corollary 1.2.10. If we remove the
assumption thatf (x) ≤ g(x), then we can see that we would
get
M x =
ba
x|g(x) − f (x)| dx.
Informal definition. Suppose R is a region in
R2 bounded by f (x) and g(x)on [a, b], where
f (x) and g(x)