Embed Size (px)
Citation preview

This content has been downloaded from IOPscience. Please scroll down to see the full text.
Download details:
IP Address: 93.180.53.211
This content was downloaded on 20/11/2013 at 18:59
Please note that terms and conditions apply.
Fragility estimates of smart structures with sensor faults
View the table of contents for this issue, or go to the journal homepage for more
2013 Smart Mater. Struct. 22 125012
(http://iopscience.iop.org/0964-1726/22/12/125012)
Home Search Collections Journals About Contact us My IOPscience

IOP PUBLISHING SMART MATERIALS AND STRUCTURES
Smart Mater. Struct. 22 (2013) 125012 (12pp) doi:10.1088/0964-1726/22/12/125012
Fragility estimates of smart structureswith sensor faultsYeesock Kim1,3, Jong-Wha Bai2 and Leonard D Albano1
1 Civil and Environmental Engineering, Worcester Polytechnic Institute, Worcester, MA, USA2 Civil Engineering, California Baptist University, Riverside, CA, USA
E-mail: [email protected], [email protected] and [email protected]
Received 11 March 2013, in final form 12 March 2013Published 1 November 2013Online at stacks.iop.org/SMS/22/125012
AbstractIn this paper, the impact of sensor faults within smart structures is investigated using seismicfragility analysis techniques. Seismic fragility analysis is one of the methods used to evaluatethe vulnerability of structural systems under a broad range of earthquake events. It would playan important role in estimating seismic losses and in the decision making process based onvibration control performance of the smart structures during seismic events. In this study, athree-story building employing a highly nonlinear hysteretic magnetorheological (MR)damper is analyzed to estimate the seismic fragility of the smart control system. Differentlevels of sensor damage scenarios for smart structures are considered to provide a betterunderstanding of the expected fragility estimates due to the impact of sensor failures.Probabilistic demand models are constructed with a Bayesian updating approach while theseismic capacity of smart structures is estimated based on the approximate structuralperformance of semi-actively controlled structures. Peak ground acceleration (PGA) of groundmotion is used as a measure of earthquake intensity. Then the fragility curves for the smartstructures are developed and compared with those for the semi-active control systems withdifferent levels of sensor damage scenarios. The responses of an uncontrolled structure areused as a baseline. It is shown from the simulations that the proposed methodology is effectivein quantifying the impact of sensor faults within smart structures.
(Some figures may appear in colour only in the online journal)
1. Introduction
Structural control technology has attracted a great deal ofattention from civil engineers because the performance ofstructures can be improved in real-time during earthquakeevents without adding too much structural mass (Yao 1972,Adeli and Saleh 1999, Soong 1990, Soong and Reinhorn1993, Housner et al 1997, Spencer and Nagarajaiah 2003,Bitaraf et al 2012, Mitchell et al 2012, Cha et al 2012, 2013).Much of the research on structural control technology in thefield of civil engineering has been focused on investigating thereduced responses of structural systems, including attempts tounderstand salient properties of control/sensing devices andthe development of new control algorithms. There has beenlimited research regarding the probabilistic measure of the
3 Author to whom any correspondence should be addressed.
vulnerability of controlled structures under various dynamicexcitations (Kim and Bai 2010, Sharifi et al 2009, Kimet al 2012). Taylor (2007) developed fragility curves for theestimation of both passively and actively controlled structures.The impact of optimal locations of actuators/dampers inthe controlled building was also investigated. Casciati et al(2008) proposed seismic risk assessment of a passivelycontrolled cable-stayed bridge structure using the presentationof vulnerability information in the form of fragility curves.In their work, analytical fragility curves were developedthrough Monte Carlo simulations. The performance limitstates were considered as random variables that were definedin terms of displacement of the deck, shear forces and momentat the base, the tower, and cable tensions. Barnawi andDyke (2008) evaluated the fragility functions of a nonlinear20-story building structure equipped with passive, active, andsemi-active control devices.
10964-1726/13/125012+12$33.00 c© 2013 IOP Publishing Ltd Printed in the UK & the USA

Smart Mater. Struct. 22 (2013) 125012 Y Kim et al
The determination of seismic risk due to sensor/actuatorfaults is another open area for research. Although the controlperformance can degrade in the presence of sensor/actuatorfaults, relatively few studies have been devoted to thesystematic examination of the impact of sensor/actuatorfaults on the performance of structural control systems.For example, Choe and Baruh (1993) applied the modalcoordinates generated by the modal observers to theestimations of the sensors in a linear time-invariant (LTI)dynamic system. That method, however, requires an accuraterepresentation of the LTI mathematical model. It is onlyapplicable to linear dynamic systems. As a nonlinear modelthat does not require an accurate mathematical representation,a neural network approach has been proposed for sensorfault detection applications in linear structural control systems(Ankireddi and Yang 1999, Li et al 2007). Sharifi et al(2010) proposed a principal component analysis (PCA)-baseddiagnosis model for sensor fault isolation and detection of anonlinear time-varying dynamic system.
A review of the literature did not identify any studiesthat presented fragility analyses to investigate the impact offaulty sensors on the performance of nonlinear time-varyingsmart structures under a variety of seismic excitations.With this in mind, the present research emerged from thequestion: ‘Are time-varying nonlinear smart control systemsvulnerable to sensor faults?’ Hence, the aim of this study is toprovide a systematic framework to conduct a seismic fragilityassessment of smart building structures with sensor damage.Improved understanding of the dynamic behavior and seismicperformance of smart structures may lead to new advancesin structural control engineering. A general procedure forfragility analyses would contribute to a performance-basedapproach in which the design is based on various parameters,including the owner’s requirements, the functional utility ofthe smart structure, the seismic risk, and potential economiclosses (Hueste and Bai 2007a, 2007b). It is importantto evaluate the impact of sensor faults/failures of thesecontrolled structures and determine ways to improve theseismic resistance of controlled systems that might be foundto be vulnerable.
This paper is organized as follows: the fundamentals ofseismic fragility analysis are described briefly in section 2;section 3 presents an analytical model for a case study smartbuilding structure equipped with a magnetorheological (MR)damper; seismic fragility curves are developed to assessseismic vulnerability for the case study building-MR dampersystems with healthy, fully damaged, and partially damagedsensing units in section 4; concluding remarks are given insection 5.
2. Seismic fragility analysis
Seismic fragility is defined as the conditional probability ofattaining or exceeding a specific damage limit state during anearthquake event with a given intensity measure (IM), such asspectral acceleration (Sa) or peak ground acceleration (PGA).In general, the fragility can be written as
F(IM;Θ) = P[g(IM;Θ) ≤ 0|IM] (1)
where g(IM;Θ) = C − D(IM;Θ) is a limit state functionused to define the failure event, for which C and Drepresent the capacity and seismic demand imposed on thesmart building, respectively, and Θ is a vector of unknownparameters that contribute to uncertainties in the demandmodel. For frame building structures, demand models andcapacity limits are expressed in terms of limiting interstorydrifts which are defined as relative horizontal displacementsbetween the top and the bottom of each floor. The overallmaximum interstory drift over the height of a building is aconvenient measure to describe the structural response of abuilding to lateral loads. Fragility curves can be developedfrom statistical methods applied to physical data gatheredfrom building responses in past earthquake events or fromanalytical methods based on mathematical modeling andsimulation of building responses to a series of earthquakes.Since limited historical records and physical data are availableto estimate failure probabilities for smart structures of variouscharacteristics and control systems, the following sectionsprovide details on a proposed analytical method to determinethe conditional failure probabilities or fragility functions.Herein, PGA is used as a measure of earthquake intensitybecause Sa corresponding to the fundamental period can varyduring seismic excitation when the structure is equipped witha highly nonlinear hysteretic device. It is also noted that directcomparisons of fragility estimates for different structuralsystems are available when PGA is used as an earthquakeintensity measure.
2.1. Probabilistic capacity models
The structural capacity relates to a specific damage limitstate, and it can be defined in terms of a maximum forceor dynamic response characteristics, such as maximum dis-placement, maximum interstory drift, maximum acceleration,or maximum velocity. The practice of performance-basedseismic design requires definition of the acceptable damagelimit states for a given earthquake intensity, and theselimits are based on input from project stakeholders andconsideration of the building’s contents and function. Inthis research, ASCE/SEI 41-06 (2007) criteria are usedto express the seismic capacity of the case study smartbuilding. ASCE/SEI 41-06 (2007) provides guidance forperformance-based seismic evaluation and rehabilitation ofexisting building structures and is based on FEMA 356(ASCE 2000). ASCE/SEI 41-06 defines a set of performancelevels: immediate occupancy (IO), life safety (LS), andcollapse prevention (CP). Defining these levels conveysexpectations for the maximum damage sustained, or damagelimit states. For example, structures capable of providingthe IO performance level should have only minor damage.Structures exhibiting the LS performance level may havesustained significant damage, but still provide an appreciablemargin against collapse. The CP performance level describesstructures that are expected to remain standing, but with littlemargin against collapse. In addition to providing a standardvocabulary for discussing performance, ASCE/SEI 41-06 alsoprovides both global-level (drift) limits and member-level
2

Smart Mater. Struct. 22 (2013) 125012 Y Kim et al
(plastic rotation) limits to quantitatively define the damagelimit states for various types of construction. For an approx-imate global assessment, the guidelines suggest limiting driftvalues for steel moment frame structures to 0.7%, 2.5%, and5.0% for the IO, LS, and CP performance levels, respectively.For braced steel frames, the corresponding drift values are0.5%, 1.5%, and 2%, respectively. For the controlled casestudy building, it is assumed that the limiting drift valuesare close to those for braced steel frames. For fragility curvedevelopment, uncertainty associated with the capacity modelis assumed to be equal to 0.3 based on Wen et al (2004).
2.2. Probabilistic seismic demand model
Probabilistic demand models have been developed to describethe relationship between earthquake intensity and the overallmaximum interstory drift over the height of a building.Equation (2) shows the model form of a probabilistic linearmodel,
D(IM;Θ) = θ0 + θ1 ln(IM)+ σε (2)
where D(IM;Θ) = ln[δ(IM;Θ)] = the natural logarithm ofthe drift demand for a given earthquake intensity IM,Θ =(θ0, θ1, σ ) is a vector of unknown parameters, ε is a randomvariable representing the error in the model with zero meanand unit standard deviation, and σ is the standard deviationof the model error. The logarithmic transformation is usedto approximately satisfy the normality assumption (i.e., ε hasthe normal distribution) and the homoskedasticity assumption(i.e., σ is constant). The unknown parameters in this equationare estimated using the Bayesian updating rule (Box and Tiao1992).
f (Θ) = γL(Θ)p(Θ) (3)
where p(Θ) is the prior distribution of Θ, which is basedon previous knowledge before obtaining the observation;L(Θ) is the likelihood function representing the objectiveinformation on Θ, which is proportional to the conditionalprobability for given values of Θ; γ is a normalizing factor;f (Θ) is the posterior distribution of Θ that incorporatesthe prior information in p(Θ) and the information fromthe observation. The mean vector, MΘ, and the covariancematrix, 6ΘΘ, can be obtained once f (Θ) is known. Inthe analysis presented in this section, a non-informativeprior distribution is assumed to reflect that there is littleor no information available about Θ before collecting theobservation.
The posterior statistics of the unknown model parametersare obtained using an adaptive Markov chain Monte Carlo(MCMC) simulation method, the DRAM method, whichcombines the delayed rejection (DR) method and the adaptivemetropolis (AM) method (Laine 2008). Markov chains aregenerated with the likelihood formulation of the demandmodels based on the initial points and non-informative priordistribution until a convergence criterion is met. To checkthe convergence of the simulated Markov chains, the Gewekeconvergence criterion is used (Geweke 1992). More detailson the calculation of the likelihood formulation can be found
in Gardoni et al (2002). Drift is the seismic load effect ofinterest, and as previously indicated, this work uses the PGAas a measure of earthquake intensity.
3. Smart building description and analytical model
3.1. Magnetorheological (MR) damper
Smart systems have been adopted from many engineeringfields because the performance of structural/mechanicalsystems can be improved without either significantlyincreasing the mass of the structure or adding high costsfor control power. They may be called intelligent structures,adaptive structures, or active structures, and the relatedtechnologies adaptronics, structronics, etc (Hurlebaus andGaul 2006). In general, smart structures are developed throughthe integration of smart materials-based actuators/sensors,control units, signal processing units and a structuralsystem. The smart materials might include piezoelectrics,shape memory alloys, electrostrictive and magnetostrictivematerials, polymer gels, etc. Smart material-based actuators(or smart damping devices) have been proposed for large-scale civil engineering structures because semi-active controlstrategies combine favorable features of both active andpassive control systems, such as reliable operation, lowpower consumption, low manufacturing cost, etc. Semi-activecontrol devices include variable-orifice dampers, variable-stiffness devices, variable-friction dampers, controllable-fluiddampers, shape memory alloy actuators, piezoelectrics, etc(Kim et al 2009). In particular, one of the controllable-fluiddampers, a magnetorheological (MR) damper, has attractedattention from civil engineers in recent years because it hasmany attractive characteristics such as reliable operation andlow power consumption. In general, an MR damper consistsof a hydraulic cylinder, magnetic coils, and MR fluids thatconsist of micron-sized magnetically polarizable particlesfloating within oil-type fluids as shown in figure 1 (Yang et al2002).
To fully use the best features of the MR damper, amathematical model that portrays the nonlinear behavior ofthe MR damper has to be developed first. However, this ischallenging because the MR damper is a highly nonlinearhysteretic device. As shown in figure 2, Spencer et al (1997)proposed a modified version of the Bouc–Wen model
fMR = c1y+ k1(x− x0), (4)
zBW = −γ |x− y|zBW|zBW|n−1
− β(x− y)|zBW|n+ A(x− y), (5)
y = 1/(c0 + c1){αzBW + c0x+ k0(x− y)}, (6)
α = αa + αbu, (7)
c1 = c1a + c1bu, (8)
c0 = c0a + c0bu, (9)
u = −η(u− v), (10)
where zBW and α, called evolutionary variables, describe thehysteretic behavior of the MR damper; c0 is the viscous
3

Smart Mater. Struct. 22 (2013) 125012 Y Kim et al
Figure 1. Schematic of the prototype 20-ton large-scale MR damper.
Figure 2. Bouc–Wen model of the MR damper.
damping parameter at high velocities; c1 is the viscousdamping parameter for force roll-off at low velocities; k0
controls the stiffness at large velocities; k1 represents theaccumulator stiffness; x0 is the initial displacement of thespring with stiffness γ , β and A are adjustable shapeparameters of the hysteresis loops, i.e., the linearity inthe unloading and the transition between pre-yielding andpost-yielding regions; v and u are input and output voltagesof a first-order filter, respectively; and η is the time constantof the first-order filter.
Note that nonlinear phenomena occur when the highlynonlinear MR dampers are applied to structural systemsfor efficient energy dissipation (Mitchell et al 2012, Arsavaet al 2013). Such an integrated system behaves nonlinearlyalthough the structure itself is usually assumed to remainlinear. In what follows, the equations of motion for a buildingstructure (Kim et al 2011) employing MR dampers aredescribed.
3.2. Building equipped with MR dampers
In this section, a three-story building structure employing anMR damper is presented for use in the fragility analyses. TheMR damper is installed on the first floor through a chevronbrace as shown in figure 3. The introduction of this devicecreates a nonlinear building-MR system, and the associatedequations of motion are given by
Mx+ Cx+Kx = ΓfMR −MΛwg, (11)
where the system matrices are given by
M =
m1 0 0
0 m2 0
0 0 m3
(12)
is the mass matrix,
C =
c1 + c2 −c2 0
−c2 c2 + c3 −c3
0 −c3 c3
(13)
is the damping matrix,
K =
k1 + k2 −k2 0
−k2 k2 + k3 −k3
0 −k3 k3
(14)
is the stiffness matrix, and
fMR(t, x1, x1, v1) =
fMR(t, x1, x1, v1)
0
0
(15)
is the MR damper force matrix. The following notation isobserved: wg denotes the ground acceleration; mi is the mass
4

Smart Mater. Struct. 22 (2013) 125012 Y Kim et al
Figure 3. Integrated building structure–MR damper system.
of the ith floor; ki is the stiffness of the ith floor columns;ci is the damping of the ith floor columns; x, x, and x are thedisplacement, velocity, and acceleration relative to the ground,respectively; x1 and x1 are the displacement and the velocityat the first floor level, respectively, relative to the ground;v is the voltage level to be applied; Γ and Λ are locationvectors of control forces and disturbance signal, respectively.This second-order differential equation can be converted intostandard state-space form
z = Az+ BfMR − Ewg,
y = Cz+ DfMR + n,(16)
where
A =
[0 I
−M−1K −M−1C
], (17)
B =
[0
M−1F
], (18)
C =
I 0
0 I
−M−1K −M−1C
, (19)
D =
0
0
M−1F
, (20)
E =
[0
F
], (21)
F =
−1 1 0
0 −1 1
0 0 −1
. (22)
The dynamic properties of the three-story building structureare adopted from a scaled model (Dyke et al 1996) ofa prototype building structure: the mass of each floorm1 = m2 = m3 = 98.3 kg; the stiffness of each storyk1 = 516 000 N m−1, k2 = 684 000 N m−1, and k3 =
684 000 N m−1; for the damping coefficient of each floorc1 = 125 N s m−1, c2 = 50 N s m−1 and c3 = 50 N s m−1.For this case study, the SD-1000 MR damper is considered,and its parameters are given in Spencer et al (1997).
3.3. Smart control algorithm
In MR damper applications, the development of appropriatecontrol algorithms has an impact on the performance of smartcontrol systems (Jansen and Dyke 2000, Jung et al 2003,Bitaraf et al 2010). Effective smart control algorithms thathave been commonly used for hazard mitigation of civilengineering structures include modern control theory such aslinear quadratic Gaussian (LQG) and intelligent controls suchas fuzzy logic (Kim et al 2010a, 2010b, Reigles and Symans2006) and neuro/emotional controls (Kim et al 2004, 2010c).
5

Smart Mater. Struct. 22 (2013) 125012 Y Kim et al
Figure 4. Implementation of smart building systems integrated building structure–MR damper system.
In this study, the H2/LQG algorithm is used to implementcontrollers into the case study smart building model as shownin figure 4.
The H2/LQG algorithm consists of two components:LQR and Kalman filter. LQR is an optimization problemthat finds control input signals u(t) to minimize a quadraticperformance criterion or cost function defined in the followingequation:
J = limT→∞
12T
E
{∫ T
−T[xTQx(t)+ uTRu(t)] dt
}, (23)
where Q and R should be the positive semi-definite stateweighting matrix and the positive definite control weightingmatrix, respectively. The full state feedback gain matrix K isfound from
u = −Kx, (24)
where x is the Kalman estimate of the state vector, and K isgiven by
K = R−1BTP. (25)
The parameters of the LQR and Kalman filter are adoptedfrom Dyke et al (1996). However, the H2/LQG algorithmshould be modified to operate the MR damper for smartstructure applications because it generates control forcesignals while current signals are used as an input signal ofthe MR damper. Thus, an inversion algorithm that convertsthe control force into current or voltage is combined with theH2/LQG controller. The converting algorithm can be eitheran inverse MR damper model or a clipped algorithm. In thispaper, a clipped algorithm is utilized. A clipped algorithmproposed by Yoshida and Dyke (2004) is given by
v = VaH({
fH2/LQG − fm}
fm),
Va =
{µc · fH2/LQG for fH2/LQG ≤ fmax,
Vmax for fH2/LQG > fmax,
(26)
where v is the voltage level, H is a Heaviside step function,fm is a measured MR damper force, fH2/LQG is a control forcesignal generated by the H2/LQG controller, and µc is a valuerelating the MR damper force to the voltage.
Figure 5. Normalized error function used for simulating sensorfaults/failures within smart structures.
3.4. Sensor damage scenario
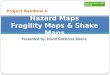
The smart structure employs three accelerometers to imple-ment the output feedback control system. An accelerometerfault is introduced into the simulations to investigate theseismic hazard due to sensor faults/failures. To explore anumber of representative fault conditions, the health status ofthe smart building is divided into four categories, defined asfollows. (1) Healthy smart structure: all of the actuators andsensors are optimally operated in the smart structure. (2) Fullydamaged structure: all of the acceleration sensors within thesmart structure have faults. (3) Partially damaged structure:in this case there is a fault in the third floor accelerometerof the smart structure while there is no fault on the first andsecond floor accelerometers. The reason that the third floorsensor is selected as a target in this study is that it produces theworst responses, compared to either the first or second flooraccelerometer fault cases. (4) Uncontrolled structure: this isthe original structure without any smart devices as a baselineof performance assessment. To mathematically model damagein the sensing units, uniform random noise signals, as shownin figure 5, with the signal-to-noise ratio (SNR) of 100 areadded into the original acceleration responses during 2–6 s.The magnitude of the noise signal (i.e., error function) isadjusted according to structural responses to a variety of
6

Smart Mater. Struct. 22 (2013) 125012 Y Kim et al
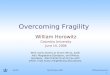
Figure 6. Median of response spectra for Fernandez and Rixmotions.
earthquake records because different earthquakes producedifferent levels of the magnitudes in seismic responses ofsmart structures.
4. Simulation outcomes
4.1. Synthetic ground motion data
To conduct nonlinear dynamic analysis, synthetic groundmotions for Memphis, Tennessee, developed by Fernandez
and Rix (2006) are used. A total of 40 ground motions areprovided for each of two earthquake hazard levels: 2% and10% probability of exceedance in 50 years. Each hazard levelhas 20 ground motions for each of two types of soil conditions(lowlands and uplands) for Memphis, Tennessee. Figure 6shows the median of response spectra for the ground motionrecords used in this study.
4.2. Probabilistic seismic demand models
A linear regression model based on the overall maximuminterstory drift for the entire building is used to predictthe seismic demand relationship. Equation (2) is used topredict the seismic demands. The posterior statistics of theunknown model parameters are obtained using an adaptiveMCMC simulation method. For example, figures 7–9 showthe one set of the Markov chains and the correspondingprobability distributions of the posterior estimates for thepartially damaged structure. These are generated with thelikelihood formulation of the demand models based on theinitial points and non-informative prior distribution until aconvergence criterion is met. To check the convergence of thesimulated Markov chains, the Geweke convergence criterionis used (Geweke 1992). It is based on the comparison betweenthe mean values of the first 10% and last 50% of the samples.If the difference of the mean values is less than 5%, theMCMC simulation is terminated.
Figure 7. Posterior statistics of θ0 for partially damaged structure. (a) Markov chains. (b) Probability distributions.
Figure 8. Posterior statistics of θ1 for partially damaged structure. (a) Markov chains. (b) Probability distributions.
7

Smart Mater. Struct. 22 (2013) 125012 Y Kim et al
Figure 9. Posterior statistics of σ for partially damaged structure. (a) Markov chains. (b) Probability distributions.
Figure 10. Probabilistic demand models for the case study structures. (a) Healthy smart structure. (b) Fully damaged structure. (c) Partiallydamaged structure. (d) Uncontrolled structure.
Figure 10 shows the relationship between maximuminterstory drift and the corresponding PGA values for the casestudy building with the sensor damage scenarios from thesimulation results. Equation (2) is used to predict the seismicdemands, as noted in the previous paragraph. It is also usedfor regression analysis. The predicted demands (solid line)are shown along with the one standard deviation confidenceinterval (dashed line) in the logarithmic space. A total of 40points are considered, where each data point represents thedemand relationship for one ground record.
As shown in figure 10, different slopes and variationsof the demand models, which are generated based on the
simulation results, indicate the level of damage in termsof the maximum interstory drift values. Table 1 shows theposterior statistics of the unknown parameters for all thescenarios. Based on the posterior statistics, the partiallydamaged structure has the highest uncertainty (σ ) in thedemand model.
4.3. Seismic fragility curves
In this study, the seismic fragility curves for the case studystructures are developed using the Monte Carlo simulations(Ditlevsen and Madsen 1996). As shown in equation (1),
8

Smart Mater. Struct. 22 (2013) 125012 Y Kim et al
Figure 11. Seismic fragility curves for the case study structures. (a) Healthy smart structure. (b) Fully damaged structure. (c) Partiallydamaged structure. (d) Uncontrolled structure.
Table 1. Posterior statistics of unknown parameters for the demand models.
Damage scenarios Parameters Mean Standard deviation
Correlation coefficient
θ0 θ1 σ
Healthy smart structure θ0 −0.108 0.127 1θ1 1.25 0.0791 0.950 1σ 0.244 0.0314 0.0216 −0.0052 1
Fully damaged structure θ0 0.0413 0.128 1θ1 1.07 0.0795 0.955 1σ 0.239 0.0286 0.0273 0.0297 1
Partially damagedstructure
θ0 0.388 0.188 1
θ1 1.31 0.116 0.955 1σ 0.353 0.0415 −0.0207 −0.0234 1
Uncontrolled structure θ0 1.68 0.168 1θ1 1.29 0.104 0.956 1σ 0.309 0.0359 −0.0022 0.005 1
probabilistic models of the structural capacity limits andseismic demand are needed to develop seismic fragilitycurves. Figure 11 shows the fragility curves based on theASCE/SEI 41-06 global-level limits for the smart structureequipped with healthy, fully damaged, and partially damaged
sensors while the uncontrolled system is used as a baseline.It can be observed that the four building categories aresimilar to a certain extent. For instance, the fragility curvestend to flatten as the ground motion intensity levels increaseand as the performance level shifts from IO to LS to CP.
9

Smart Mater. Struct. 22 (2013) 125012 Y Kim et al
Figure 12. Comparisons of seismic fragility curves: IOperformance level.
The steeper curves for the IO performance level representmuch more variability of maximum drift than for the othertwo performance levels. All four structures have highersensitivities to exceeding the IO performance level.
It is noted that direct comparison of fragility estimatesis available when PGA is used as an earthquake intensitymeasure. Therefore, the impact of the sensor faults within thesmart structures on the fragility curves for each limit state canbe assessed. Figures 12–14 provide comparisons of fragilitycurves for each performance level, immediate occupancy (IO),life safety (LS), and collapse prevention (CP). In all threefigures, the fragility curves for the healthy smart structureprovide lower probabilities of exceedance for comparablelimit states than those for the smart system with faulty sensors.Additionally, the unhealthy smart structures provide lowerprobabilities of exceedance for comparable limit states thanthose for the uncontrolled system. This shows the impact ofthe smart controller in terms of the seismic fragility, to provethat smart structures are effective in reducing the fragility forall the performance levels.
As shown in the figures, the fragilities of the smart controlsystem with fully faulty sensors are lower than partially faultysensors. These comparisons also show that the fragilitiesof the smart control system with fully faulty sensors aremarginally higher than the healthy smart control systemfor LS and CP performance levels. The reason could befound in the estimated state values that serve as feedbackto the linear quadratic regulator. The Kalman filter estimatesall the state values from three contaminated accelerationresponses measured from the fully damaged sensing units(i.e., three accelerometers). Because the damaged signalsare created through the addition of random noise signals(SNR of 100) into original accelerations, the higher level ofacceleration outputs is applied to the Kalman filter estimator.The much larger acceleration responses might have led to thelarger displacement and velocity response estimations. Thelarger state estimations would cause the control algorithm tocalculate larger control forces, i.e., higher levels of current
Figure 13. Comparisons of seismic fragility curves: LSperformance level.
Figure 14. Comparisons of seismic fragility curves: CPperformance level.
signals to be fed to the MR damper, eventually leadingto larger control forces (i.e., close to passive-on status).Although the larger control forces would be effective inreducing the drift responses of the smart structures, largercontrol forces would also increase the absolute accelerationat the installed location of the MR dampers because thepassive-on system attempts to lock up the floor on whichthe MR damper is installed (Jansen and Dyke 2000). Thus,the passive-on status would increase seismic base shearforces in the smart structures. In the near future, theresearch team plans to study systematically the impact ofthe state estimator on the performance of the smart controlsystems.
5. Conclusion
This paper has attempted to present a framework todevelop seismic fragility assessments and to investigate theimpact of faulty sensors on the smart structure performance
10

Smart Mater. Struct. 22 (2013) 125012 Y Kim et al
under a variety of seismic excitations, using fragilityanalysis techniques. A case study of a three-story buildingequipped with highly nonlinear hysteretic control devices,magnetorheological (MR) dampers, is investigated. Thecurrent signals providing feedback to the MR dampers aredetermined by a linear quadratic Gaussian (LQG) controlalgorithm. Probabilistic demand models using a Bayesianapproach are constructed. Fragility curves for the smartcontrol system with partially faulty sensors, with fully faultysensors, and with no sensor fault are developed. Fragilitycurves for the original three-story building without any smartdevices are also established as baselines. It is confirmed fromthe fragility analysis that: (1) seismic fragilities of buildingscan be reduced by adopting smart control technology asprevious studies have demonstrated, and (2) smart controlsystems are still stable when the sensing units have somefaults because semi-active control techniques are alwaysstable in general.
References
Adeli H and Saleh A 1999 Control, Optimization, and SmartStructures: High-Performance Bridges and Buildings of theFuture (New York: Wiley)
Ankireddi S and Yang H T Y 1999 Neural networks for sensor faultcorrection in structural control ASCE J. Struct. Eng.125 1056–64
Arsava S K, Kim Y, El-Korchi T and Park H S 2013 Nonlinearsystem identification of smart structures under high impactloads Smart. Mater. Struct. 22 055008
ASCE 2000 Prestandard and Commentary for the SeismicRehabilitation of Buildings (FEMA 356) (Washington, DC:Prepared by American Society of Civil Engineers for theFederal Emergency Management Agency)
ASCE/SEI 2007 Seismic rehabilitation of existing buildingsASCE/SEI (41-06) (Reston, VA: American Society of CivilEngineers)
Barnawi W and Dyke S J 2008 Fragility based analysis of a 20-storybenchmark building with smart device implementation Proc. ofthe 11th Aerospace Division Int. Conf. on Engineering,Science, Construction, and Operations in ChallengingEnvironments (Long Beach, CA, March)
Bitaraf M, Hurlebaus S and Barroso L 2012 Active and semi-activeadaptive control for undamaged and damaged buildingstructures under seismic load Comput.-Aided Civ. Infrastruct.Eng. 27 48–64
Bitaraf M, Ozbulut O E, Hurlebaus S and Barroso L 2010Application of semi-active control strategies for seismicprotection of buildings with MR dampers Eng. Struct.32 3040–7
Box G and Tiao G C 1992 Bayesian Inference in Statistical Analysis(Reading, MA: Wiley)
Casciati F, Cimellaro G P and Domaneschi M 2008 Seismicreliability of a cable-stayed bridge retrofitted with hystereticdevices Comput. Struct. 86 1769–81
Cha Y J, Agrawal A K, Kim Y and Raich A 2012 Multi-objectivegenetic algorithms for cost-effective distributions of actuatorsand sensors in large structures Expert Syst. Appl. 39 7822–33
Cha Y J, Kim Y, Raich A and Agrawal A K 2013 Multi-objectiveoptimization for actuator and sensor layouts of activelycontrolled 3D buildings J. Vib. Control 19 942–60
Choe K and Baruh H 1993 Sensor failure detection in flexiblestructures using model observers J. Dyn. Syst. Meas. Control115 411–8
Ditlevsen O and Madsen H O 1996 Structural Reliability Methods(New York, NY: Wiley)
Dyke S J, Spencer B F, Sain M K and Carlson J D 1996 Modelingand control of magnetorheological dampers for seismicresponse reduction Smart Mater. Struct. 5 565–75
Fernandez J A and Rix G J 2006 Soil attenuation relationships andseismic hazard analyses in the upper Mississippi embayment8th US National Conf. on Earthquake Engineering 8NCEE(San Francisco, CA) http://geosystems.ce.gatech.edu/soildynamics/research/groundmotionsembay/
Gardoni P, Der Kiureghian A and Mosalam K M 2002 Probabilisticcapacity models and fragility estimates for RC columns basedon experimental observations ASCE J. Eng. Mech.128 1024–38
Geweke J 1992 Evaluating the accuracy of sampling-basedapproaches to the calculation of posterior moments Bayes.Statist. 4 169–93
Housner G W, Bergman L A, Caughey T K, Chassiakos A G,Claus R O, Masri S F, Skelton R E, Soong T T, Spencer B Fand Yao T P 1997 Structural control: past, present, and futureASCE J. Eng. Mech. 123 897–971
Hueste M B D and Bai J-W 2007a Seismic retrofit of a reinforcedconcrete flat-slab structure: part I-seismic performanceevaluation Eng. Struct. 29 1165–77
Hueste M B D and Bai J-W 2007b Seismic retrofit of a reinforcedconcrete flat-slab structure: part II-seismic fragility analysisEng. Struct. 29 1178–88
Hurlebaus S and Gaul L 2006 Smart structure dynamics Mech. Syst.Signal Process. 20 255–81
Jansen L M and Dyke S J 2000 Semiactive control strategies for MRdampers: comparative study ASCE J. Eng. Mech. 126 795–803
Jung H J, Spencer B F and Lee I W 2003 Control of seismicallyexcited cable-stayed bridge employing magnetorheologicalfluid dampers ASCE J. Struct. Eng. 129 873–83
Kim D H, Seo S N and Lee I W 2004 Optimal neurocontroller fornonlinear benchmark structure ASCE J. Struct. Eng. 130 424–9
Kim Y and Bai J-W 2010 Seismic fragility analysis of smartstructures 5th World Conf. on Structural Control andMonitoring (Shinjuku, July)
Kim Y, Chong J W, Chon K and Kim J M 2012 Wavelet-basedAR-SVM for health monitoring of smart structures SmartMater. Struct. 22 015003
Kim Y, Hurlebaus S and Langari R 2010a Control of a seismicallyexcited benchmark building using linear matrixinequality-based semiactive nonlinear fuzzy control ASCE J.Struct. Eng. 136 1023–6
Kim Y, Langari R and Hurlebaus S 2009 Semiactive nonlinearcontrol of a building structure equipped with amagnetorheological damper system Mech. Syst. SignalProcess. 23 300–15
Kim Y, Langari R and Hurlebaus S 2011 MIMO nonlinearidentification of building-MR damper system Int. J. Intell.Fuzzy Syst. 22 185–205
Kim Y, Langari R and Hurlebaus S 2010b Model-based multi-input,multi-output supervisory semiactive nonlinear fuzzy controllerComput.-Aided Civ. Infrastruct. Eng. 25 387–93
Kim Y, Kim C and Langari R 2010c Novel bio-inspired smartcontrol for hazard mitigation of civil structures Smart Mater.Struct. 19 115009
Laine M 2008 Adaptive MCMC methods with applications inenvironmental and geophysical models PhD ThesisLappeenranta University of Technology, Finland
Li Z, Koh B H and Nagarajaiah S 2007 Detecting sensor failure viadecoupled error function and inverse input–output modelASCE J. Eng. Mech. 133 1222–8
Mitchell R, Kim Y and El-Korchi T 2012 System identification ofsmart structures using a wavelet neuro-fuzzy model SmartMater. Struct. 21 115009
11

Smart Mater. Struct. 22 (2013) 125012 Y Kim et al
Reigles D G and Symans M D 2006 Supervisory fuzzy control of abase-isolated benchmark building utilizing a neuro-fuzzymodel of controllable fluid viscous dampers Struct. ControlHealth Monit. 13 724–47
Sharifi R, Kim Y and Langari R 2009 Sensor fault detection of largesmart civil structures ASME Dynamic Systems and ControlConf. (Hollywood, CA, Oct.)
Sharifi R, Kim Y and Langari R 2010 Sensor fault isolation anddetection of smart structures Smart Mater. Struct. 19 105001
Soong T T 1990 Active Structural Control: Theory and Practice(Essex: Longman Scientific)
Soong T T and Reinhorn A M 1993 An overview of active andhybrid structural control research in the US Struct. Des. TallSpec. Build. 2 192–209
Spencer B F, Dyke S J, Sain M K and Carlson J D 1997Phenomenological model for magnetorheological dampersASCE J. Eng. Mech. 123 230–8
Spencer B F and Nagarajaiah S 2003 State of the art of structuralcontrol ASCE J. Struct. Eng. 129 845–56
Taylor E 2007 The development of fragility relationships forcontrolled structures MS Thesis Department of CivilEngineering, Washington University
Wen Y K, Ellingwood B R and Bracci J M 2004 Vulnerabilityfunction framework for consequence-based engineeringMid-America Earthquake Center Project DS-4 ReportUrbana, IL
Yang G, Spencer B F, Carlson J D and Sain M K 2002 Large-scaleMR fluid dampers: modeling and dynamic performanceconsiderations Eng. Struct. 24 309–23
Yao J T P 1972 Concept of structural control ASCE J. Struct. Div.98 1567–74
Yoshida O and Dyke S J 2004 Seismic control of a nonlinearbenchmark building using smart dampers ASCE J. Eng. Mech.130 386–92
12