Embed Size (px)
Citation preview

BioSystems 91 (2008) 388–400
Available online at www.sciencedirect.com
From a homeostatic to a homeodynamic self
Takashi Ikegami ∗, Keisuke SuzukiDepartment of General Systems Sciences, The Graduate School of Arts and Sciences,
The University of Tokyo, 3-8-1 Komaba, Tokyo 153-8902, Japan
Received 10 February 2007; received in revised form 16 March 2007; accepted 17 May 2007
Abstract
Life as an autonomous homeostatic system is discussed. A mechanism that drives a homeostatic state to an autonomous self-moving state is examined with two computational cell models. The mechanism is met with Ashby’s ultrastability, where random
parameter searching is activated when a system breaks a viability constraint. Such a random search process is replaced by themembrane shape in the first model and by chaotic population dynamics in the second model. Emergence of sensors, motors and therecursive coupling between them is shown to be a natural outcome of an autonomous homeostatic system.© 2007 Elsevier Ireland Ltd. All rights reserved.s; Senso
Keywords: Autonomy; Autopoieisis; Self-reproduction; Chemotaxisi1. Background
The mission of artificial life study is to constructlife-like forms in computer simulations and to create atheory for a possible evolutionary scenario from protocells to higher order cognitive agents. The definitionof a life form is provided only vaguely, and we try torefine the definition step by step by synthesizing newlife forms.
But there are basic properties we reserve for under-standing life forms, which we tend to synthesize inartificial life systems. A most well known property thatwe think essential for a life form is “self-reproduction”.First, we briefly describe how this idea has developedsince its definition by John von Neumann (1966). Then
we discuss the fundamental problems with this ideaand propose a second idea, i.e., life as a “homeostaticsystem”. The advantage of this second line is that we∗ Corresponding author. Tel.: +81 3 5454 6541.E-mail address: [email protected] (T. Ikegami).
0303-2647/$ – see front matter © 2007 Elsevier Ireland Ltd. All rights reservdoi:10.1016/j.biosystems.2007.05.014
ry–motor coupling
can make a connection between cognitive functions andbasic life processes. This paper is to pursue this ideaof the homeostatic nature of life with new perspec-tives.
The idea of life as self-reproduction was formulatedfor the first time by John von Neumann with 29 states oftwo-dimensional cellular automata (CA). He designed aCA rule set to make a special spatial configuration capa-ble of reproducing itself. A message from the study isthat self-reproduction needs a self-description “tape” todo exact copying. A universal constructor was defined asa universal cell configuration that can build any machinestructure coded on the description tape, where this tapewas also given by a spatial configuration.
Since this pioneering work, a new design principle forself-reproducing machines has been studied using two-dimensional CA. In particular, Langton (1984), Tempesti(1995), Reggia et al. (1993), and more recently Sayama
and Salzberg (Sayama, 1998, 1999; Salzberg et al., 2003;Salzberg and Sayama, 2004), and Suzuki and Ikegami(2006)’s works have made certain progress in this line.Those systems show not only beautiful replicating pat-ed.

ioSystems 91 (2008) 388–400 389
tw
btreuwiaramtfosbdaM
soiotoCdlpmstlsaa
2
mdshaehf
T. Ikegami, K. Suzuki / B
erns, but also evolutions of new replicating patterns byay of mutual interactions among replicators.A major drawback is that reproduction in CA cannot
e stable against noise. A self-reproducing state turns outo be very rare because a single bit flipping is fatal to self-eproduction. This cannot be a problem if the system isssentially noisy. Alan Turing (1952)’s approach was tose a reaction diffusion system to understand life forms,hich is much more robust than CA. Turing’s approach
s now represented by the Gray and Scott (1983) modelnd the reproducing machine in CA is replaced by aeproducing chemical spot. Turing did not take intoccount the self-description tape. Instead, he assumedutual reacting activator and inhibitor chemicals. Under
he condition that the inhibitor chemical diffuses muchaster than the activators, the system generates a varietyf spatio-temporal patterns, called Turing patterns. Oneuch pattern produces self-reproducing spots. A particle-ased simulation with a minimal chemical network alsoemonstrates robust self-reproduction, particularly withrigid cell boundary (Ono and Ikegami, 2000, 2003,adina and Ikegami, 2004).But most of the Turing pattern models lack “univer-
al reproductivity”, i.e., you cannot reproduce any kindf pattern. More seriously, self-replicating spots have nonternal structures, so it is difficult for them to have mem-ry or heritability. Too much robust self-reproductionhus loses essential properties of life systems. On thether hand, a robust self-replicator in one-dimensionalA is proposed by Gacs (2001). He elaborated a systemesign that can repair any given pattern under any noiseevel. Gacs’ CA can self-emulate the “right” self-imageattern to repair the perturbed pattern, which requiresany complex instructions. This complex rule is for
elf-repair, not self-reproduction. We have to get backo rudimentary levels of simulating life forms. In the fol-owing, we examine the necessary conditions for life aself-preservation. We study Turing pattern dynamics andset of chemical networks used for self-reproduction asbasic platform for self-preservation.
. Ashby’s Ultrastability
Different from the approaches of John von Neu-ann and Turing, Ashby (1960) raised an interesting
esign principle for brain (and life forms) outsideelf-reproduction. Ashby was mainly concerned withomeostasis. He thought life’s adaptive behavior is only
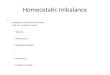
n outcome of homeostatic property. We can further gen-ralize this idea by saying that “self” is an outcome ofomeostasis. We know that the living condition involvesar non-equilibrium states, and this sustains a type ofFig. 1. An illustration of Ashby’s ultrastability (modified from Ashby(figure 7/5/1 1960)).
identical states as a kind of “self” in the form of attrac-tors. Assume that we have a set of chemicals. Thosechemicals can constitute a dynamic state comparable toa self-preserving attractor, which we like to label as aprimitive sign of self. But these self-preserving attrac-tors can exist only when we hold an adequate parameterset that controls their stability. Thus, we call the param-eter range a viability constraint because out of the range,no self-preserving property appears.
This idea of viability constraint can be found inAshby’s ultrastable system, where he illustrated dou-ble feedback interactions between a system (reactingpart) and an environment (Fig. 1). A primary feedbackloop is a mutual interaction between complex sensoryand motor channels and the environment. Another feed-back goes from viability constraints to a reacting partthrough essential variables that control the reacting part.Usually, the second feedback loop is executed intermit-tently because it changes the meta-parameters of thesystem. When the parameter values are out of the viabil-ity constraints, the second feedback adjusts the essentialparameters to let the system move towards the attractors.
The difference between variables and parameters ismade explicit when writing down equations. Variablestemporally evolve, and parameter values are fixed intime. In real systems, the difference is not that sim-ple. Variables change much faster than parameters. Forexample, in modeling evolutionary ecosystems, the pop-ulation of each species changes in time, but the mutationrate is usually fixed during the simulation. A mutationrate is a parameter of such a system. However, in realevolutionary ecosystems, the mutation rate itself mustchange over a long time span. We have studied a sys-tem in which both population and mutation rate evolvein time. There we discussed a weak chaos with largedegrees of freedom, called “homeochaos”, which serves
as a mechanism for dynamic homeostasis (= homeo-dynamics) (Kaneko and Ikegami, 1992; Ikegami andKaneko, 1992). In this paper, we will also argue for adynamic mechanism of homeostasis.
ioSyste
390 T. Ikegami, K. Suzuki / BAshby’s viability constraint and the second feedbackmechanism deliver an important message to artificiallife studies because most artificial life creatures neverdie. Any adaptive behavior should be grounded in theviability constraint, if the behavior is truly adaptive.For example, assume that artificial agents are attractedby light targets like the one discussed in Braitenberg(1984)’s vehicle. The tendency to move toward the lighthas nothing to do with the survivability of the agent.The light seeking tendency has been decoupled from thebasic requirement of viability. An important lesson fromAshby’s ultrastability is that the second feedback loopthrough the essential variables of the system is indepen-dent of how a system copes with the environment. Thisis why the second feedback can provide adaptive behav-ior. But a link from homeostasis to adaptive behaviorand to further cognitive functions is not yet well under-stood (Di Paolo, 2003). Regarding these points, we willstudy the missing link from homeostatic states to adap-tive and cognitive behaviors. In the next section, weclarify our starting point by introducing the notion of sen-sorimotor couplings, autonomous motion and a theory ofautopoiesis.
3. Sensorimotor Couplings
Sensorimotor coupling (See e.g. Scheier and Pfeifer,1995; Pfeifer and Scheier, 2001; Ikegami and Zlatev,2007) is a way to understand life forms, particularlywhen we deal with cognitive functions. A definition ofsensorimotor coupling is an agent’s mapping from motorsensory input patterns to motor outputs, but the mappingis not necessarily fixed all the time. Evolutionary roboticstakes a synthetic approach toward cognitive behaviors bygenerating adequate sensori-motor couplings. Usually,the sensorimotor coupling is developed using evolution-ary techniques, e.g., genetic algorithms (Morimoto andIkegami, 2004). The outcome of the sensorimotor cou-pling is to provide a new way of perceiving the world. Byexploring the environment using its own action patterns,an agent obtains sensorimotor-based knowledge, whichwe call a dynamic categorization.
The concept of dynamic categorization originatesfrom Gibson’s (1962, 1979)“ecological” theory of per-ception and in particular his emphasis on perception asa form of activity, which is often referred to as activeperception. Gibson’s insights have been developed andre-interpreted in multiple ways. Sasaki (2000, 2002)
applied a Gibsonian analysis to various situations, suchas a blind man’s navigation patterns in a town, people’susage of the visual landscape, and the action structure ofbreaking an egg. According to Costall (2007), the mostms 91 (2008) 388–400
important characteristics of Gibson’s concept is that it isequivalent neither to external sensory input, nor to “rep-resentations” generated in one’s brain, but constitutesa dynamic, relational category that arises as an activeperceiver interacts with an environment. The followingthree aspects are particularly important in rethinking theconcepts of active perception (see Sasaki, 2000, 2002,O’Regan and Noe, 2001):
(i) Perception can emerge via self-movement; (ii) per-ceiving the environment means to explore it; (iii) anyaction has inherent multiplicity.
An instance of the first aspect is active touch. Gibson(1962) reports on experiments with blind subjects touch-ing different shapes of cookie cutters. If the cutter wasplaced on the subjects’ palms, they could tell the cor-rect shape with only 50% accuracy. When the cutter waspushed randomly on their palms, the subjects could tellthe shape with 72% accuracy. Only by touching the cutterin a self-guided manner could they recognize the objectin more than 95% of the cases. This study also illustratespoint (ii) that perception is a form of exploration: As wewill discuss in this paper, exploration is not just a methodto arrive at perception; rather perception is equivalent toan on-going exploratory process.
The third aspect is especially important for simula-tions of artificial agents. An issue that often comes upin this context is how to select the most appropriate setof actions. However, aspect (iii) implies that no discreteaction set (a “plan”) needs to be prepared in advance.Our body schema (Gallagher, 2005) has a huge num-ber of degrees of freedom. Even a simple action pattern(e.g., sitting down on a chair) consists of multiple sub-level actions, and the exact sequence will be afforded bythe environment as the action proceeds.
The notion of active perception is often evoked withinthe “embodied cognition” approach in the field of cogni-tive robotics (Pfeifer and Scheier, 2001). In this context“embodiment” refers to spatial/temporal dynamics andthe physical constraints of a robot’s body with respectto a given environment. Of course, there is no reasonto suppose that such “artificial creatures” have any kindof phenomenal experience. Nevertheless, the agents canillustrate how categorization can result from masteringsensorimotor coordination with certain aspects of theenvironment, and in the process creating dynamic cat-egories of them without forming concepts.
Recently, many studies of dynamic categorizationhave involved “artificial creatures”. Some of these stud-
ies involve actual, physical robots (Scheier and Pfeifer,1995), whereas others involve computational simula-tions (Morimoto and Ikegami, 2004). Although somescholars, such as Brooks (1999) and Steels (1994), insist
ioSyste
o“l
4
difpttimoecccacda
rsibtcsastscfib
cbaec
t2(ccD
T. Ikegami, K. Suzuki / B
n the importance of using real physical devices inembodied AI”, there are good reasons to rely on simu-ations as well.
. Autopoiesis and the Beyond
One purpose of this paper is to see how homeostaticynamics generate sensorimotor coupling. A basic ideas taken from autopoiesis, which is a central frameworkor understanding life systems from an organizationaloint of view (Varela, 1992, 1979). Autopoiesis treatshe essence of a life system as an autonomous organiza-ion of boundary structures/conditions. This definitions particularly relevant for chemical life systems. First,
etabolic chemicals create membrane chemicals by wayf catalytic processes. Those membrane chemicals coop-ratively create a closed membrane structure. A catalytichemical is spatially trapped by a closed membranehain, and the reproduction of membrane chemicals isarried on. This preserved closed membrane is calledboundary. Indeed, a chemical synthesis of a proto
ell has been experimentally studied under such con-itions (Toyota et al., 2006). A boundary should beutonomously produced in a proto cell.
The interaction between a cell system and the envi-onment in autopoiesis becomes what F. Varela callstructural coupling. When an autopoietic cell systems acting in an environment, it receives various feed-ack from the environment. Some effects are fatal tohe system. But once the system has survived a severeondition, it is engraved as the survival limit. Under theurvival limit, a system undergoes structural changes,nd the interaction with the environment that causes atructural change is called a structural coupling. Whenhe structure of a system changes, the system can pre-erve its organization. But as Di Paolo (2003) arguedarefully, autopoiesis and structural coupling are insuf-cient to generate adaptive behaviors or “sense-making”ehaviors in life systems.
So there is a missing link between autopoiesis andognitive behavior which should be addressed. A hint cane found in what Ashby calls the second feedback loop;utonomous and unintentional controlling of a system’sssential variables when the system leaves the viabilityonstraint (see Fig. 1).
There are studies on the relationship between cogni-ion and the viability constraint. (Moreno and Etxeberria,005). argue that the adaptive behavior of a single cell
e.g., moving toward a fertile environment by sensing thehemical gradient) is the result of satisfying the viabilityonstraint by means of an internal metabolic network.i Paolo (2000) simulated homeo-adaptive behavior inms 91 (2008) 388–400 391
a neural net with a special Hebbian dynamics. Therehe actually showed that the right and left eyes can beexchangeable even after development – unless the adap-tation (this time developing visual sensors) is not evolvedfunctionally – by simply rewiring neural circuits. Wehave this robust adaptability only when the model isbased on homeostatic dynamics that maintain the via-bility range.
But if we superimpose homeostasis on an alreadydeveloped sensorimotor system, the system becomesdifficult to motivate. We need to follow the syntheticorder, and there should exist an intermediate stagebetween homeostasis and well-developed sensorimotorcouplings. Such an intermediate stage is what we mainlydiscuss in this paper.
In the following sections, we start by introducingtwo different computational models of abstract chemicalagents. In Section 5, we investigate the viability con-straint with motile cell modeling. By extending Varela’soriginal model on autopoiesis, we discuss membranefluctuation as a source for autonomy and adaptability.Membrane dynamics that cause entire cell movementcan be varied by local membrane morphology. In Sec-tion 6, we introduce another chemical agent usingDaisy world homeostasis. An explorative action pat-tern with homeodynamics is discussed. We will showthat this homeostatic mechanism is the outcome ofspatio-temporal chaotic dynamics. By preparing anadequate motor computation, we can develop an explo-rative sensorimotor coupling, which is necessary foractivating the second feedback loop in ultrastable sys-tems. Then again, a sophisticated membrane structurehas an important role in connecting the homeostaticproperty and sensorimotor coupling. In the last sec-tion, we discuss the viability condition in terms ofhomeostasis.
5. Autopoietic Cell Model
5.1. Basic Metabolism
In a proto cell system, sensory and motor systemscannot be independent of the self-maintaining process.In primitive cell systems, the metabolism of membranecomponents is regarded as reconfiguration of the sen-sory device, in the sense that it changes penetrativeproperties. Furthermore, the same membrane can workas a primitive form of actuator. There is evidence that
such a dichotomy happens in real-life systems. Themovement of slime mould is achieved by the contin-ual dissolution and recreation of the membrane withthe protoplasm flow. Moreno et al. (2005) argue that
ioSystems 91 (2008) 388–400
(iii) Each of the bonded L chemicals can move randomlyat the rate Pm without breaking the link. A cell as awhole shows random Brownian motion (Fig. 3b).
392 T. Ikegami, K. Suzuki / B
the adaptive behavior of a single cell moving towarda fertile environment by sensing the chemical gradientis the result of evolving metabolic networks. And theyalso argue that self-preservation and self-motility mightoccur synchronously in a proto cell system. Emergenceof a nervous system can segregate self preservation andautonomous movement.
Below, we show a simple cell model that exhibitschemotactic behavior owing to dynamic changes of themembrane. By considering proto cell systems, we wouldlike to analyze the relationship between homeostasis andsensorimotor coordination in organisms.1
5.2. Substrate/Catalyst/Link Model
A simple computational model of autopoiesis hasbeen proposed by Varela et al. (1974). The model hasthree kinds of chemicals (substrate/catalyst/link). There-fore it is called the SCL model in this paper. S, C and Lare mutually reactive chemicals. The reaction betweencatalyst C and substrate S makes a chemical L, whichis mutually connected, and finally generates a circularboundary to enclose catalyst C. We regard this membraneboundary and the area enclosed within the membrane asa cell. When this membrane breaks up, the catalyst willescape, and the membrane will no longer be sustained.By successfully enclosing the catalyst, the inner regionsurrounded by the membrane maintains the reaction. Itrepairs the membrane by keeping the catalyst inside it.This circular relationship provides an example of self-preserving cell dynamics. We extend this SCL model todiscuss the development of cell motion and of primitivesensors on the membrane.
5.3. Mobile SCL Model
In the original SCL model, chemicals can diffuseon two-dimensional lattice space. S or L chemicals canshare the same lattice site, but neither S and C nor L andC can. By this constraint, S chemicals can freely crossbonded L chemicals (which we call the membrane), buta C chemical is trapped by the membrane. Two L chemi-cals can form a linear bond when they occupy the Mooreneighborhood. But each L particle can bond with at most
two other L chemicals (See Fig. 2).The basic reaction is the following. When two Schemicals occupy the Moore neighborhood of the cat-alytic chemical, they will become a single L chemical.
1 The detail discussion of this secsion should be referred to Suzukiand Ikegami (2007).
Fig. 2. An example of spatial configuration of the cell region of theSCL model.
S + S + C → L + C we inherited these basic settingsfrom the original model. Our main modification is in themetabolic process of L chemicals on the membrane. Inthe original model, the L chemicals dissolve into twoS chemicals at a certain probability, so that the cellshould repair a hole on the membrane with the extraL chemicals inside it. Instead of indiscriminate disso-lution of L chemicals, we introduce the following newrules:
(i) A produced L chemical is absorbed into theneighboring link boundary with a rate Pi, if theneighboring link is formed from the L chemicalsin its Neumann neighborhood.
(ii) The reverse process, releasing L chemical from thelink when three L chemicals form a right angle,is concerned/allowed. The released L chemicalbecomes two S chemicals. This process occurs withthe rate Pr (Fig. 3 a). Additionally, we introduce themovement of the bonding membrane.
Fig. 3. Reactions and movements of L chemicals are illustrated. (a)Production, insertion and re-moval of L chemicals. (b) Three kinds ofrandom-lined L chemicals.

T. Ikegami, K. Suzuki / BioSystems 91 (2008) 388–400 393
F smootf
5
amniahIwsultaoc
fawtc6cstiintat
cell, that value is much larger than that in the round cell.It means that the L chemicals are more distributed in thesharp cell than in the round cell. However, the sharp cellhas more pinning sites in the membrane, so that the local
ig. 4. Two different cell configurations with different removal rates. Aorm with the rate at 0.05 (below).
.4. Chemotaxis with Shape Dynamics
It should be noticed that, under the new conditions,cell can change its size, but it never breaks (the mini-al cell size is four particles). But this assumption does
ot spoil the original model. The size of the membranes controlled by two parameters, the insertion rate (Pi)nd the removal rate (Pr). If the removal parameter isigh enough, the size will shrink to the minimal size.f the insertion rate is high enough, the membrane sizeill increase. There is an adequate parameter range that
ustains moderate cell size. We see different cell config-rations by changing the removal rate in Fig. 4. With aarge removal rate, a membrane has a smooth configura-ion with a large curvature. But with a small rate, it hasrugged spiky configuration with a small curvature. Inther words, by changing the removal rate, the membranean take different configurations.
We demonstrate that different configurations have dif-erent sensitivities to the chemical gradient when puttingsource and a sink of S chemicals at different positions,hich creates a flow of S chemicals from the source to
he sink. In Fig. 5, we compute the distance from the Shemical source as a function of time. The space size is0 ×60; the center of source is placed at (48, 0), and theenter of the sink is placed at (30, 30). The source/sinkize is 3 × 3. By increasing the removal rate, we noticedhat the cell approaches the source more swiftly. Thats due to the spontaneous symmetry breaking, whichs why circular forms can climb up the gradient. We
oticed that spiky forms generate a more complicatedangled surface structure, so that their free movementsre highly restricted. Circular forms are more sensitive tohe environmental gradient than spiky forms. By draw-h circular form with a removal rate at 0.15 (above) and a spiky rugged
ing a transition diagram among different configurations,we noticed that the spiky forms are easily trapped by themeta-stable configurations.
This tendency can be explained from the microscopicpoint of view. S chemicals do not distribute equally inthe area surrounded by the membrane. Fig. 6(a) demon-strates that they have different concentrations in the foreand rear sides of the cell with respect to the source side.A membrane is more frequently broken and repaired inthe sites where the S chemical has a low concentration,which occurs on the rear side of the cell. L chemical hasa higher concentration at the same site (Fig. 6(b)). InFig. 6(b), we computed that on which part of the mem-brane the motile L chemicals was detected. In the sharp
Fig. 5. Distance from an S chemical source as a function of time.Different colors correspond to different removal rates.

394 T. Ikegami, K. Suzuki / BioSystems 91 (2008) 388–400
L cheml, and Mrane fro
Fig. 6. The spatial fluctuation of the number of S, free L, and bondedforms(left). The spatial fluctuation of the number of Insertion, Removathe number of particles on the left side of the barycenter of the memb
L chemicals may sometimes move only in the oppositedirection to the source site. Thus, the sharp cell as a wholecannot simply follow the outside gradient. We hypothe-size that this pinning effect surpresses the chemotaxis incase of the sharp cell.
In other words, the spatial metabolic organizationgenerates self-movement as well. Therefore, chemotaxisappears to be guided naturally by the membrane form.
5.5. Viability and Behavioral Constraints
As mentioned above, the balance of the removal rateand the insertion rate expands the area where L chemi-cals are generated. Both extremes of the two parametersmake the cell fall into a “dead” state with a shrunkenarea. In this sense, the insertion and removal rates canwork as viability constraints to cell activity. When wesee the cell as a sensorimotor system, the metabolic pro-cess that determines the physiological limit becomes anew factor determining the sensitivity to the substrategradient in the environment. The gradient-climbing-uptendency of the cell naturally emerges from the con-tinuing flow of the metabolic process of L chemicalsand incoming S chemicals through the membrane. Thisspontaneous chemotactic behavior is caused by the cellmetabolism in our model. The cell does not just sustainits existence passively, but actively moves toward theregion of high substrate density so that it continues toexist.
On the other hand, we showed that the different mem-brane shapes, which are controlled by the Pr parameter,
lead to different motion patterns of the cell system.Here, the motion patterns are whether the cell climbsup the gradient or walks around rather randomly. Theconfiguration of the membrane can be seen as a kind oficals inside the membrane are computed for two different membraneovement events are computed The values are calculated by subtractingm the number on the right side.
constraint determining cell behaviors. It is worth notic-ing that this membrane configuration is also constructedby the metabolic self-maintaining process.
When the cell responds toward the environment onlyin a self-maintaining process, its viability constraint canbe described as a pure physiological property, such as thedensity of the substrate or the extent of the reaction area.However, once a cell performs as a sensorimotor system,and certain constraints are required to maintain consis-tent sensorimotor activity, cell viability becomes centralto this behavioral constraint because the membrane con-figuration as a behavioral constraint originated with basicmetabolism. There is a mutual constraint between thephysiological constraint and the behavioral constraint.The cell should sustain itself within the metabolic lim-itation, and that constrains its behavior. Conversely, thecell should demonstrate consistent sensorimotor behav-ior, and that constrains the metabolic process. Thus theviability constraint in a motile cell system is effectivelychanged.
6. Modeling by the Daisyworld Agent
6.1. Daisyworld Model
Global regulation of the atmosphere of a planet witha biosphere is named the Gaia hypothesis (Lovelock,1972). A complex hierarchical network of living speciescan behave cooperatively to regulate temperature at theearth’s surface, so that the network itself can be pre-served. This feedback mechanism is demonstrated using
a simplified ecosystem with two competing species ofdaisies, black and white (Watson and Lovelock, 1983).The simple story is that white and black daisies have dif-ferent albedo (reflection of the sunlight) and their growth
ioSyste
rwlttwtsLSschiistem
ttafdFcsawshltasc
6
iaitnteitat
T. Ikegami, K. Suzuki / B
ate depends on the local temperature. Because black andhite daisies have opposite tendencies toward the sun-
ight, they can self-regulate the temperature by tuningheir population size. If there are more black daisies, theemperature goes up as the average albedo gets lower,hereas if there are more white daisies, the tempera-
ure goes down due to the higher albedo value. Thisimple scenario is certainly realized with Watson andovelock’s modeling and with other variations (e.g.,taley, 2002; Harvey, 2004). Harvey (2004) did furtherimplifications and demonstrated robust homeo-staticontrol. What is interesting with Inman’s work is thate used the homeostatic mechanism to model a sens-ng system. A circular body agent can rotate aroundts center with the force from a tentacle with a sen-or. Many tentacles on the surface cooperatively worko “correctly” rotate the agent toward a light source, forxample. This is an example of a homeostatic sensingechanism.Although the original paper on Daisyworld paid lit-
le attention to the population dynamics of the daisies,here are several arguments that population dynamics doffect the system (Staley, 2002; Zeng et al., 1990). Apartrom the Daisyworld modeling, population dynamicso affect environmental conditions (e.g., Tyrrell, 1999).rom theoretical points of view, population dynamicsan have rich properties that may be useful for homeo-tatic control. Actually, we have demonstrated (Kanekond Ikegami, 1992; Ikegami and Kaneko, 1992) thateak chaos with large degrees of freedom can sustain
pecies diversity. Thus, in the following, we study aomeodynamic regulation mechanism of daisy popu-ation dynamics. Then, in the next part, we will usehe mechanism to model the navigation behavior of angent. The purpose is, as we have discussed so far, toee how homeodynamic regulation leads to sensorimotorouplings.
.2. Simulation Model
The Daisyworld is theoretically equivalent to Tur-ng’s reaction diffusion system. A black daisy has a lowlbedo, so it raises the local surface temperature wheret grows. Whereas white daisies have a high albedo, sohey lower the temperature where they grow. We assumeo direct interaction between black and white daisies;hey interact only by way of the surface temperature. Wexpress the population size of black daisies at spatial site
as xi and that of white daisies by yi. The local tempera-ure at that site is expressed as Ti. Due to heat conductiont the rate DT, we have the following equation for theime evolution of the local temperature for each locationms 91 (2008) 388–400 395
i (i = 1 . . . N):
∂Ti
∂t= α(Te − Ti) + k(xi − yi) +DT∇2Ti (1)
where Te is the external temperature (e.g., the tempera-ture of the sunlight) and the third term is the conductionprocess given by DT∇2
i Ti = D(Ti+1 + Ti−1 − Ti/2)where we assume that the Daisyworld is the one-dimensional with a periodic boundary.
The second term is a feedback from the black andwhite daisies, which corresponds to Ashby’s first feed-back. Here we simply assume that the feedback effectis proportional to the difference in population size ofblack and white daisies. Population growth and decay ofdaisies are governed by the following equation for eachlocation i:
∂xi
∂t= R(Ti)x−K(xi) +DB∇2
i xi (2)
∂yi
∂t= R(Ti)y −K(yi) +DW∇2
i yi (3)
where R(Ti) is a reproduction rate that is a function ofthe local temperature Ti, and K(xi) is the death rate.In the Daisyworld models, R(T ) is usually given as aparabolic function. In other words, the growth rate takes apositive value between T1 and T2, and it vanishes outsidethat range. We simply assume thatR(T ) takes a constantvalue β in between T1 and T2 andK(x) is proportional topopulation size when it is large (i.e., larger thanXc) but itis a given constant −γ , when population size is small. Weuse this threshold death process in order to have a longmemory effect. The dynamic equation of daisies containsa diffusion (immigration) process with the rates Db andDW, whereD∇2
i xi = D(xi+1 + xi−1 − xi/2). Similar tothe Turing instability, we use the inequality condition s.a.DW ≥ Db. Additionally to the above settings, we use aone-dimensional periodic boundary condition, and thesystem size N is 200.
6.3. Simulation Results
Depending on the parameter values, the externaltemperature, and the initial configuration of the daisypopulation, different attracting states emerge, such asattractors with no daisies (dead state), with only whiteor black daisies or with both daisies. When both daisiescoexist, the stationary state can be further classified bythe population dynamics. Basically, the attractor state
consists of traveling clusters of black and white daisies,which we call daisy solitons (See Fig. 7). This daisysoliton is organized by a population of black daisies fol-lowed by that of white daisies. There can exist many
396 T. Ikegami, K. Suzuki / BioSystems 91 (2008) 388–400
the Daily sprea
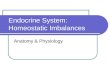
Fig. 7. A spatial (vertical axis)-temporal (horizontal axis) pattern ofwhite daisies. The transverse waves denote solitons and other gradual
solitons at the same time, and each of them can runeither directions. When solitons meet, they are annihi-lated in pairs or passed through. But sometimes theycreate a turbulent state, where unstable waves of daisiesare localized in some regions. This turbulent state oftenexpands slowly in both directions and finally dominatesthe whole space, but it also decays out or shoots newsolitons. This rather complicated situation is sometimesobserved in specific cellular automata rules and otherspatially extended chaotic systems. In terms of tem-perature, daisy solitons carry heat pulses (singular hightemperatures), and the soliton turbulent state creates heatturbulence.
When soliton turbulence over-dominates the wholespace, the average temperature is well regulated aslong as the external temperature lies between 0.26 and0.63(see Fig. 8). This region is greater than the givenviability range of 0.4 and 0.6 for the growth functionR. A known regulation mechanism (e.g., Harvey, 2004)is that a population is temporally fixed, but the ratio of
black and white daisy regulates the average temperature.Here, the mechanism is more dynamic as the temporalstructure of the daisy population regulates the tempera-ture. Due to this new mechanism, the local temperature isFig. 8. The surface temperature as the function of the external temper-ature. The flat temperature region found in (0.26, 0.63) is a homeostaticregion associated with chaotic population dynamics.
syworld. The grey scale represents the mixture pattern of black andding regions denote turbulent states.
intensively fluctuating locally. Daisyworld is regulatingthe average temperature by the chaotic dynamics.
When there is no soliton turbulence, it is difficultto have homeostasis. When the daisies are decaying,the average temperature simply obeys the external tem-perature. Around the upper regulatory temperature (thistime around 0.63), a partially turbulent state or simplesoliton-coexistence phase emerges. In such cases, aver-age temperature is not simply determined by the externaltemperature. This region has a strong hysteresis, so thatthe final state (and the outcome of the average tempera-ture) is very sensitive to the profile of the system. This isalso true in the lower temperature region. When we raisethe external temperature to greater than around 1.4, theaverage temperature obeys the external temperature.
In sum, this dynamic and complicated version of theDaisyworld regulatory dynamics reproduces the basichomeostatic result of the usual version. The observedmechanism is very general and results from the Tur-ing instability, so we can use it for a general regulatorymechanism.
6.4. Simulating Mobile Agents
Using the Daisyworld modeling, we now simulate amobile agent with a circular body of a radius r whose sur-face is covered with the daisy population (see Fig. 9). Weassume that mobility of the agent is determined by thesurface temperature. As a simple example, we assumedthat when a local temperature is lower than the averagetemperature, there is a force vector from that site to thedirection of the center of the circular body. Also we com-puted the population size difference at each site and usedit to determine the amplitude of the force:
�Fi = −k1θ
(Ti −
∑Ti
)�ni cos(ψi) (4)
iN
�τi = −k2θ
(Ti −
∑i
Ti
N
)�τi sin(ψi) (5)

T. Ikegami, K. Suzuki / BioSystems 91 (2008) 388–400 397
Fd
waaψ
ttwctrilfisc
tfebpIaastisioas
aw
Fig. 10. An example of heat sources distributed in the two-dimensionalspace, where the daisy at the position r receives the sum of heat flux∑
iHmaxexp−|r−ri|/rh from each source. A brighter color represents a
ig. 9. An illustration of an agent that has a Daisies (black and whiteaisies are represented by pins) on its surface.
here �ni is the normal vector and �ti the tangential vectort that site of the body and θ is the step function. Themplitude of the force is given by the k1 cos(ψi), wherei = tan−1(xi − yi) Also in the tangential direction,
here is a torque vector whose amplitude is proportionalo the k2 sin(ψi). This setting provides that the agentalks randomly when the temperature distribution is
haotically varying over space and time. But when theemperature distribution is fixed spatially and tempo-ally, the agent shows a marching movement. If theres an equal amount of white and black daisies, or if theocal temperature is higher than the averaged value, noorce or torque exists. This set of the equation of motions found by trial and error, however, the result of theimulation below is not too sensitive to the details of thishoice.
We now put the agent in an environment with dis-ributed heat sources, that is, Te in Eq. (1) becomes theunction of space. Due to the finite body size, daisies gen-rally have different Te depending on the body sites. Theusiness of the Daisy world is to regulate the body tem-erature, but this time the agent moves autonomously.n this model, no explicit sensors are prepared for thegent. Instead, adequate heat flux from the environmentctivates the daisies on the agent’s surface, which sub-titutes for the agent’s sensory system. It happens thathe daisy soliton bifurcates when the heat flux becomesntense. When that happens, the agent becomes doubleensitive to the heat flux because it has two solitons onts surface. In other words, a population cluster of daisiesn the body surface constitutes a sensory system of thisgent and a temperature regulation mechanism at the
ame time.Using the environment in Fig. 10, we have tested thegent’s behavior in an “inhomogeneous” environmentith several heat sources distributed in a space. Each
higher temperature region. An agent is located in the center of this fig-ure. The boundary pattern of the circular agent represents temperaturedistribution.
heat source radiates a heat flux radially whose ampli-tude decays exponentially as a function of distance, andeach portion of the agent’s body surface integrates allthe heat flux from the environment. In a homogeneousenvironment, each portion receives the same heat radi-ation. A temperature caused by the integrated heat fluxis inserted as Te in the above Eq. (1). Therefore, whenan agent moves around, Te will vary accordingly. Here,the controlling parameters are the maximum heat ampli-tude (hmax), the half-decaying distance (rh), the radius ofthe agent body (bd), and the amplitude of the navigationforce vector (k1 and k2) in Eqs. (4) and (5). Depend-ing on the heat distribution, and those parameters, theagent demonstrates several kinds of navigation patterns,which are controlled by the daisy population dynamics.The navigation behavior is terminated when the daisydynamics fallsdown to a simple attractor.
When the dynamics is in a fully chaotic state, thenavigation space is highly limited. The agent’s behaviorbecomes a random fluctuating pattern around a singleheat source. Our concern here is the emergence of explo-rative behaviors because the exploration is a paraphraseof trial and error, which can be a cause of Ashby’s secondfeedback dynamics. In this experiment, the explorativebehavior is defined as an itinerant behavior from oneheat source to the other. To have this behavior, the agentfirst approaches a heat source, then it must change itsinternal state and leave that source. This navigation pro-cess is sustained by the itinerant behavior between partial
soliton turbulence and two three-soliton states. There-fore, the itinerant behavior is terminated when the daisydynamics attains the chaotic attractor or the dead state.
398 T. Ikegami, K. Suzuki / BioSyste
Fig. 11. The surface temperature as the function of the maximal heatamplitude .16 heat sources, and each source is put regularly in a space.The effective Te perceived by the agent is overlaid in the figure.
As indicated in Fig. 11, dynamic states with aregion that show fluctuating average temperatures aftera flat temperature region are the candidates for suchexplorative navigation. The fate of the itinerant behav-ior is determined by the environment and the internaldynamics. An agent can develop various spatio-temporalattractors on its surface, which create the profile (longterm memory) of the agent. In other words, the agent’sexploration behavior differs depending on its previoussensory experience in an environment. The length of thismemory effect is determined by the size of the agent andthe environmental structures.
So far, we have focused on the regulation mechanismdriven by the population dynamics of the Daisyworldbecause the population dynamics is sufficiently unstableto break the homeostatic state and cause the explorativenavigation. But it should be remarked that daisy popu-lation dynamics is not strictly determined by the surfacetemperature. This weak correlation is a prerequisite forultrastability.
7. Discussion
In the middle of the 20th century, a movement ofcybernetics drew attention to a new theory of life. Cyber-netics was the first interdisciplinary science that attractednot only biologists but also mathematicians, physicists,psychologists and people from many other fields. A mainmessage from cybernetics was to take homeostasis as abasis of life forms. But we still have a missing link fromthe homeostatic state to cognitive behaviors.
When building a machine, we design sensorimotorcoordination to produce a desired action pattern. But wecan barely give a motivation or intention to the machine,because the entire desired action pattern is given from the
ms 91 (2008) 388–400
external designer. A light-seeking machine merely stopsmoving when there are no lights. Therefore we have togo back to the origin of life and pursue the evolutionaryprocess all the way up to cognitive states.
Autopoiesis is a theory that deals with an organiza-tion of physical membranes or a metabolic (re)cyclingof essential chemicals. But autopoiesis does not sim-ply study physical chemical properties. It provides ahint to think about a self-boundary without any inputsor outputs. Ashby’s ultrastability is about a homeo-static mechanism with two kinds of feedback, which aresomehow missing in Autopoietic theory. In particular,a second feedback loop through a viability constraint isan important mechanism often neglected in autopoiesis.The viability constraint is, as we redefined in the first sec-tion, a physiological range that supports the homeostaticstate of a system. A second feedback loop determinedby the viability constraint is uncorrelated with a senso-rimotor coupling between a system and its environment.Because of this uncorrelated relationship, sensorimotorcoupling is repaired without sacrificing the homeostaticstate.
We have developed the idea a step further. In orderto bootstrap evolution from the homeostatic state, weinsist on autonomous movement. By having autonomousmovement, a system can distinguish likes from dislikesand prey from predators. But more important, a systemshould develop a new type of homeostasis conservedunder the autonomous movement. Because autonomousmovement perturbs the system in qualitatively differentways, the latter must distinguish which is its own motionand which is not. A boundary between self and an envi-ronment is varied by autonomous movement. Therefore,the viability constraint is expected to be updated. Thispicture is what we have examined with our computa-tional models.
Ashby argued, “almost any machine or physical sys-tem will break if its variables are driven far enough awayfrom their usual values”, and he then went on to say thata “widespread tendency for systems to show changesof step-function form if their variables are driven farfrom some usual value”. (Ashby, 1960, p. 93). This hap-pens for both models by changing a membrane shape inthe first model or by changing the population dynamicsin the second model. However, when a system movesaround, the same viability condition is no longer avail-able. In the first model, only an autonomous mobile agentwith a round membrane shape can survive. In the second
model, an autonomous mobile agent must sacrifice thechaotic attractor to explore. But the explorative behaviorrisks killing the Daisyworld. Therefore, Ashby’s secondfeedback loop is realized by the homeodynamic process.
ioSyste
fcacwsshof
A
sbtCoJ
R
A
B
B
C
D
D
G
G
G
G
G
H
T. Ikegami, K. Suzuki / B
It is difficult to make a direct link between cognitiveunctions and homeostatic behaviors. There is an intri-ate step from homeostatic proto cells to self mobilend homeostatic cells, which we call homeodynamicells. The transition from homeodynamic cells to thoseith sensors is what we have to understand in the next
tep. Then the homeodynamic cells elaborate to haveensori-motor coordination, which is when we expectigh cognitive functions to appear. In this paper, we havenly demonstrated a possible step of the first transitionrom a homeostatic to a homeodynamic self.
cknowledgments
T.I. thank Ezequiel di Paolo for valuable discus-ions and comments. This work is partially supportedy Grant-in aid (No. 09640454) and by the 21st Cen-ury COE (Center of Excellence) program (Researchenter for Integrated Science) both from the Ministryf Education, Culture, Sports, Science, and Technology,apan.
eferences
shby, W.R., 1960. Design for a Brain: The Origin of AdaptiveBehaviour, 2nd ed. Chapman and Hall, London.
raitenberg, V., 1984. Vehicles: Experiments in Synthetic Psychology.MIT Press, Cambridge, MA.
rooks, R.A., 1999. Cambrian Intelligence: The Early History of theNew AI. MIT Press, Bradford Books, Cambridge, MA.
ostall, A., 2007. Bringing the body back to life: James Gibson’s ecol-ogy of agency. In: Zlatev, J., Ziemke, T., Frank, R., Dirven, R.(Eds.), Body, Language and Mind, vol. 2. Mouton de Gruyter.
i Paolo, E.A., 2003. Organismically-inspired robotics: homeostaticadaptation and natural teleology beyond the closed sensorimo-tor loop. In: Murase, K., Asakura, T. (Eds.), Dynamical SystemsApproach to Embodiment and Sociality. Advanced KnowledgeInternational, Adelaide, pp. 19–42.
i Paolo, E.A., 2000. Homeostatic adaptation to inversion of the visualfield and other sensorimotor disruptions. In: Meyer, J.-A., Berthoz,A., Floreano, D., Roitblat, H., Wilson, S. (Eds.), From Animals toAnimats 6: Proceedings of the Sixth International Conference onthe Simulation of Adaptive Behavior. MIT Press, Cambridge, MA.
acs, P., 2001. Reliable Cellular Automata with Self-Organization. J.Stat. Phys. 103, 45–267.
allagher, S., 2005. How the Body Shapes the Mind. Oxford UniversityPress.
ibson, J.J., 1962. Observations on active touch. Psychol. Rev. 69,477–491.
ibson, J.J., 1979. The Ecological Approach to Visual Perception.Houghton Mifflin, Boston.
ray, P., Scott, S.K., 1983. Autocatalytic reactions in the isothermal,
continuous stirred tank reactor: isolas and other forms of multista-bility. Chem. Eng. Sci. 38 (1), 29–43.arvey, I., 2004. Homeostasis and rein control: from daisyworld toactive perception. In: Pollack, J., Bedau, M., Husbands, P., Ikegami,T., Watson, R.A. (Eds.), Proceedings of the Ninth International
ms 91 (2008) 388–400 399
Conference on the Simulation and Synthesis of Living Systems,ALIFE’9. MIT Press, Cambridge, MA, pp. 309–314.
Ikegami, T., Zlatev, J., 2007. From pre-representational cognition tolanguage. In: Zlatev, J., Ziemke, T., Roz, F., Dirven, R. (Eds.),Body, Language and Mind, vol. 2. Mouton de Gruyter, Berlin, pp.241–283.
Ikegami, T., Kaneko, K., 1992. Evolution of host-parasitoid networkthrough homeochaotic dynamics. CHAOS 2, 397–408.
Kaneko, K., Ikegami, T., 1992. Homeochaos: dynamical stability ofsymbiotic network with population dynamics and evolving muta-tion rates. Physica D 56, 406–429.
Langton, C.G., 1984. Self-reproduction in cellular automata. PhisicaD 10, 135–144.
Lovelock, J.E., 1972. Gaia as seen through the atmosphere. Atmos.Environ. 6, 579–580.
Madina, D., Ikegami, T., 2004. Cellular formation in a 3D moleculardynamics system with chemistry. In: Artificial Life IX: Proceed-ings of the Ninth International Conference on the Simulation andSynthesis of Living Systems. MIT Press, pp. 461–465.
Moreno, A., Etxeberria, A., 2005. Agency in natural and artificialsystems. Artif. Life 11, 161–175.
Morimoto, G., Ikegami, T., 2004. Evolution of plastic sensory–motorcoupling and dynamic categorization. In: Pollack, J., Bedau, M.,Husbands, P., Ikegami, T., Watson, R.A. (Eds.), Artificial Life IX:Proceeding of the Ninth International Conference on the Simula-tion and Synthesis of Living Systems. MIT Press, Cambridge, MA,pp. 209–214.
Neumann, J.V., 1966. Theory of Self-Reproducing Automata. Univer-sity of Illinois Press Urbana, Illinois.
Ono, N., Ikegami, T., 2000. Self-maintenance and self-reproduction inan abstract cell model. J. Theor. Biol. 206, 243–253.
Ono, N., Ikegami, T., 2003. Selection of Catalysts through CellularReproduction in Artificial Life VIII, Standish, R.K., Bedau, M.A.,Abbass, H.A. (Eds), MIT.
O’Regan, J.Kevin., Noe, A., 2001. A sensorimotor account of visionand visual consciousness. Behav. Brain Sci. 24 (5).
Pfeifer, R., Scheier, C., 2001. Understanding Intelligence. MIT Press,Cambridge, MA, USA.
Reggia, J.A., Armentrout, S.L., Chou, H.H., Peng, Y., 1993. Sim-ple systems that exhibit self-directed replication. Science 259,1282–1287.
Salzberg, C., Antony, A., Sayama, H., 2003. Genetic diversificationand adaptation of self-replicators discovered in simple cellularautomata. In: Proceedings of the Sixth International Conferenceon Humans and Computers (HC-2003). University of Aizu, Japan,pp. 194–199.
Salzberg, C., Sayama, H., 2004. Complex genetic evolution of artificialself-replicators in cellular automata. Complexity 10 (2), 33–39.
Sasaki, M., 2000. Chikaku ha Owaranai [Perception NeverStops—Introduction to Affordance] Tokyo: Seidosha. 2002 Sentai-Shinrigaku no Kousou [Grand Design of Affordance]. Universityof Tokyo Press, Tokyo.
Sayama, H., 1998. Introduction of structural dissolution into Lang-ton’s self-reproducing loop. In: Artificial Life VI: Proceedings ofthe Sixth International Conference on Artificial Life. MIT Press,Cambridge, MA, pp. 114–122.
Sayama, H., 1999. A new structurally dissolvable self-reproducing
loop evolving in a simple cellular automata space. Artif. Life 5 (4),343–365.Scheier, C., Pfeifer, R., 1995. Classification as sensory–motor coor-dination. In: Proceedings of the European conference on artificiallife, ECAL-95, pp. 656–667.

ioSyste
Watson, V., Lovelock, J.E., 1983. Biological homeostasis of theglobal environment: the parable of daisyworld. Tellus 35B, 284–
400 T. Ikegami, K. Suzuki / B
Staley, M., 2002. Darwinian selection leads to Gaia. J. Theor. Biol.218, 35–46.
Steels, L., 1994. The artificial life roots of artificial intelligence. Artif.Life 1 (1/2), 76–110.
Suzuki, K., Ikegami, T., 2006. Spatial pattern induced evolution ofself-replicating loop net-work. J. Artif. Life 12 (4), 461–485.
Suzuki, K., Ikegami, T., in press. Shapes and Self-Movement in Proto-Cell System Artificial Life.
Tempesti, G., 1995. A new self-reproducing cellular automaton capableof construction and computation. In: F.M., et al. (Ed.), Advancesin Artificial Life, LNAI-929, Springer-Verlag, pp. 555–563.
Toyota, T., Tsuha, H., Yamada, K., Takakura, K., Yasuda, K.,
Sugawara, T., 2006. Fluorescence microscopic investigation onmorphological changes of giant multilamellar vesicles induced byamphiphilic additives. Langmuir 22, 1976–1981.Turing, A.M., 1952. The chemical basis of morphogenesis. Philos.Trans. R. Soc. London B 237, 37–72.
ms 91 (2008) 388–400
Tyrrell, T., 1999. The relative influence of nitrogen and phosphorus onoceanic primary producton. Nature 400, 525–531.
Varela, F.R., 1992. Autopoiesis and a biology of intentionality.In: Proceedings of a workshop on Autopoiesis an Perception,pp. 4–14.
Varela, F.R., 1979. Principles of Biological Autonomy. North Hol-landk, New York.
Varela, F.R., Maturana, V., Uribe, V., 1974. Autopoiesis: the organiza-tion of living systems, its characterization and a model. Bio. Syst.5, 187.
289.Zeng, X., Pielke, R.A., Eykholt, R., 1990. Chaos in Daisy-world. Tellus
42B, 309–318.