Embed Size (px)
Citation preview
AVL List GmbH (Headquarters)
Frontloaded e-AWD development
with automated system
optimizationEAWD19 - Electrification and All-wheel Drive Congress
Graz / Spielberg May 9. – 10. 5. 2019
Joachim ECKER
Mario OSWALD

Market Situation & ChallengeElectric vehicles worldwide sales
Source: https://about.bnef.com/blog/cumulative-global-ev-sales-hit-4-million/https://www.best-selling-cars.com/global/2018-full-year-international-worldwide-car-sales-and-global-market-analysis/
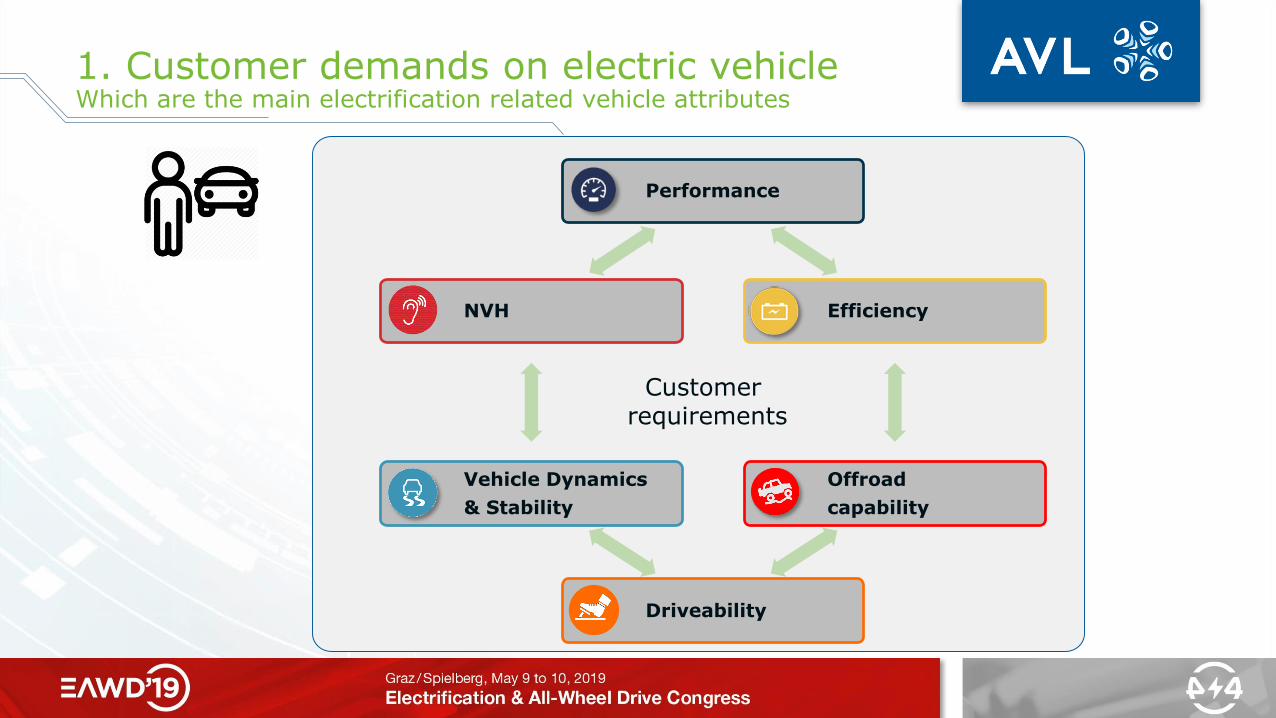
Performance
Efficiency
Offroad
capability
Driveability
Vehicle Dynamics
& Stability
NVH
1. Customer demands on electric vehicleWhich are the main electrification related vehicle attributes
Customer requirements
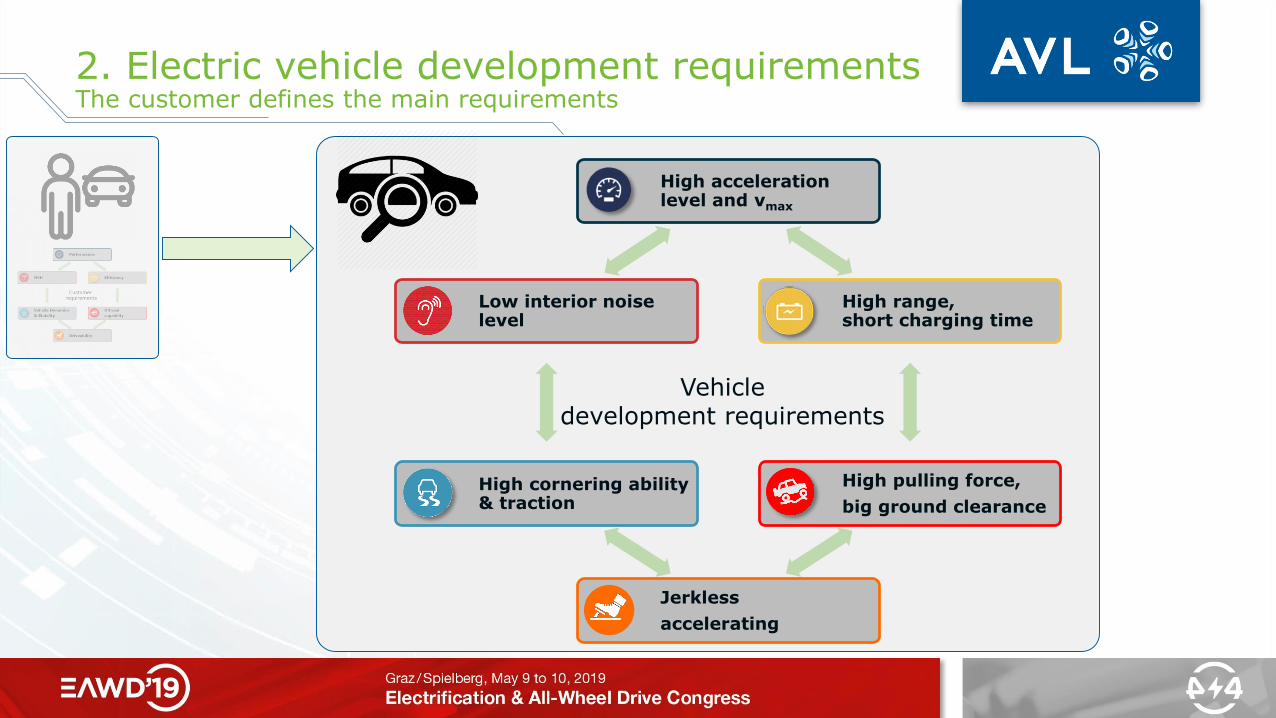
2. Electric vehicle development requirementsThe customer defines the main requirements
High acceleration level and vmax
High range, short charging time
High pulling force,
big ground clearance
Jerkless
accelerating
High cornering ability & traction
Low interior noise level
Vehicledevelopment requirements
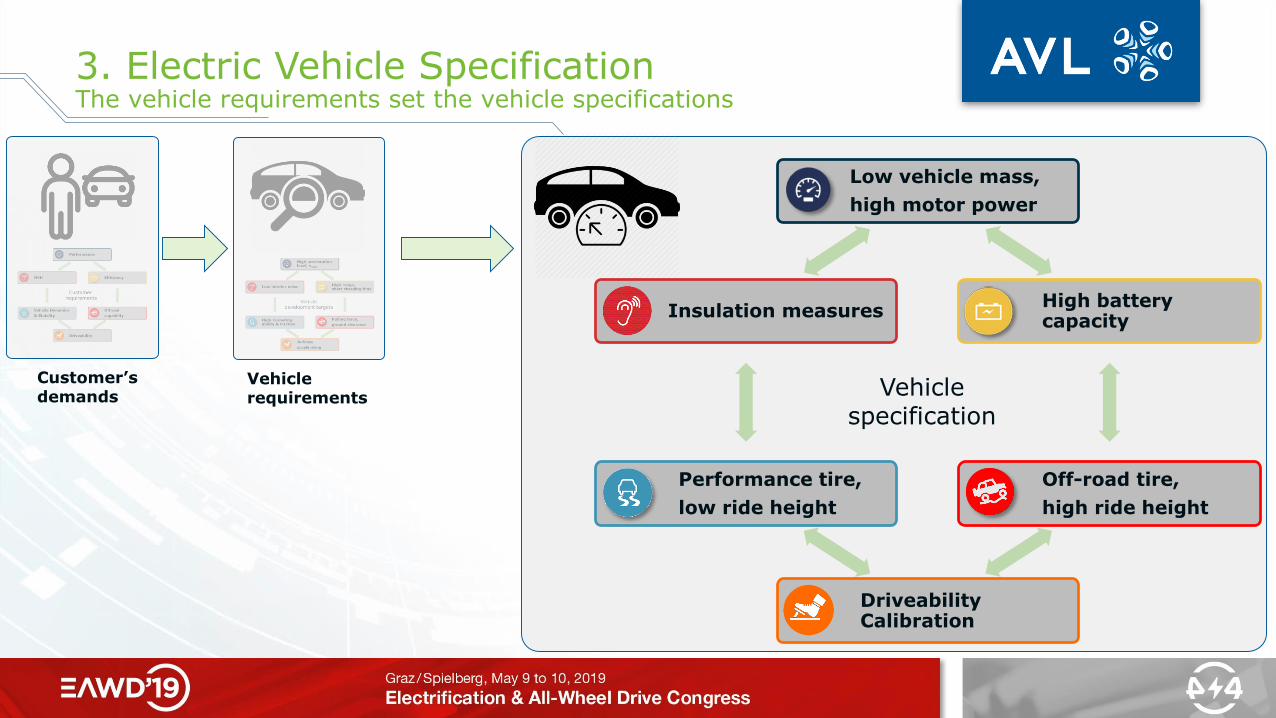
3. Electric Vehicle SpecificationThe vehicle requirements set the vehicle specifications
Low vehicle mass,
high motor power
High battery capacity
Off-road tire,
high ride height
Driveability Calibration
Performance tire,
low ride height
Insulation measures
Vehiclespecification
Customer’s demands
Vehicle requirements
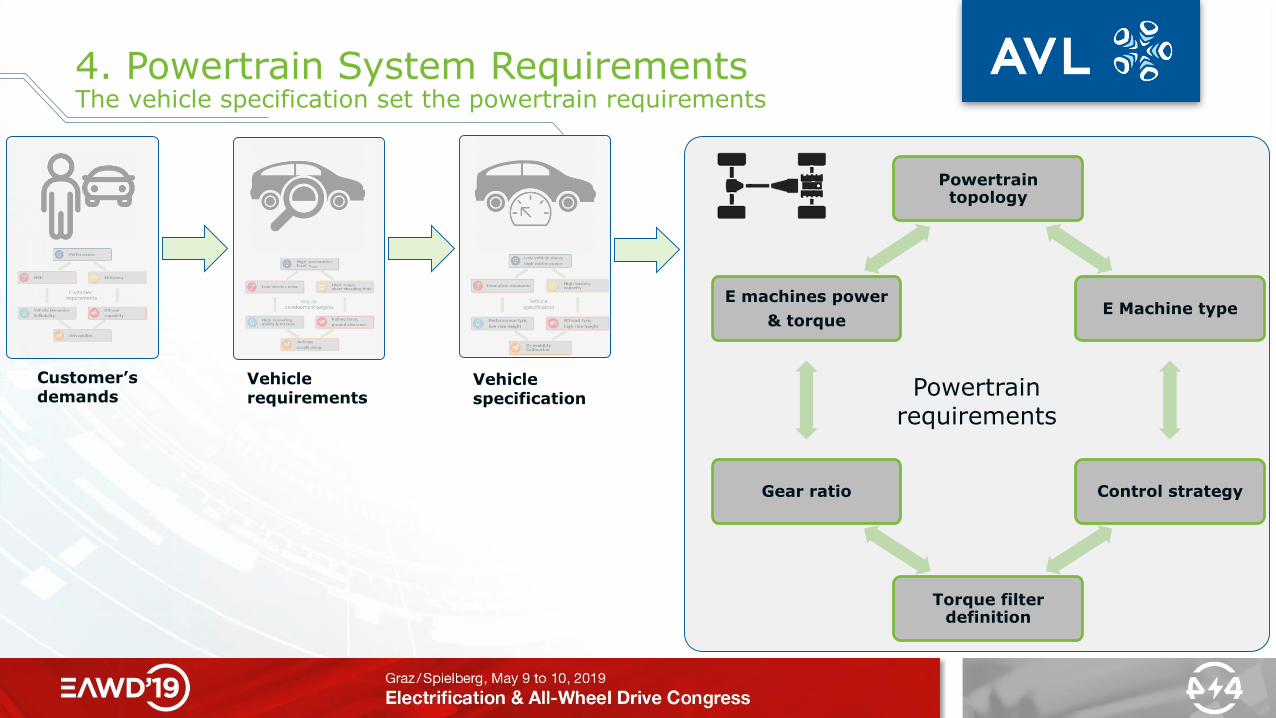
4. Powertrain System RequirementsThe vehicle specification set the powertrain requirements
Powertrain topology
E Machine type
Control strategy
Torque filter definition
Gear ratio
E machines power
& torque
Powertrainrequirements
Customer’s demands
Vehicle requirements
Vehicle specification
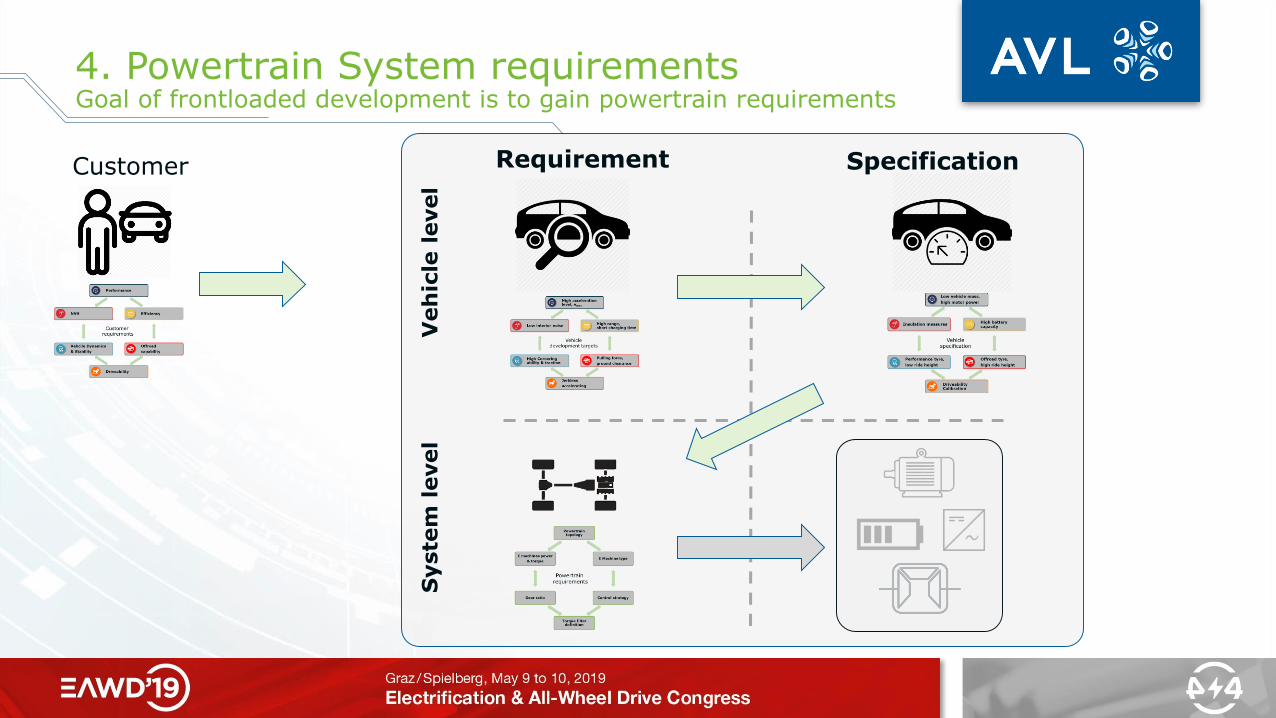
Syste
m level
Veh
icle
level
4. Powertrain System requirementsGoal of frontloaded development is to gain powertrain requirements
Customer Requirement Specification
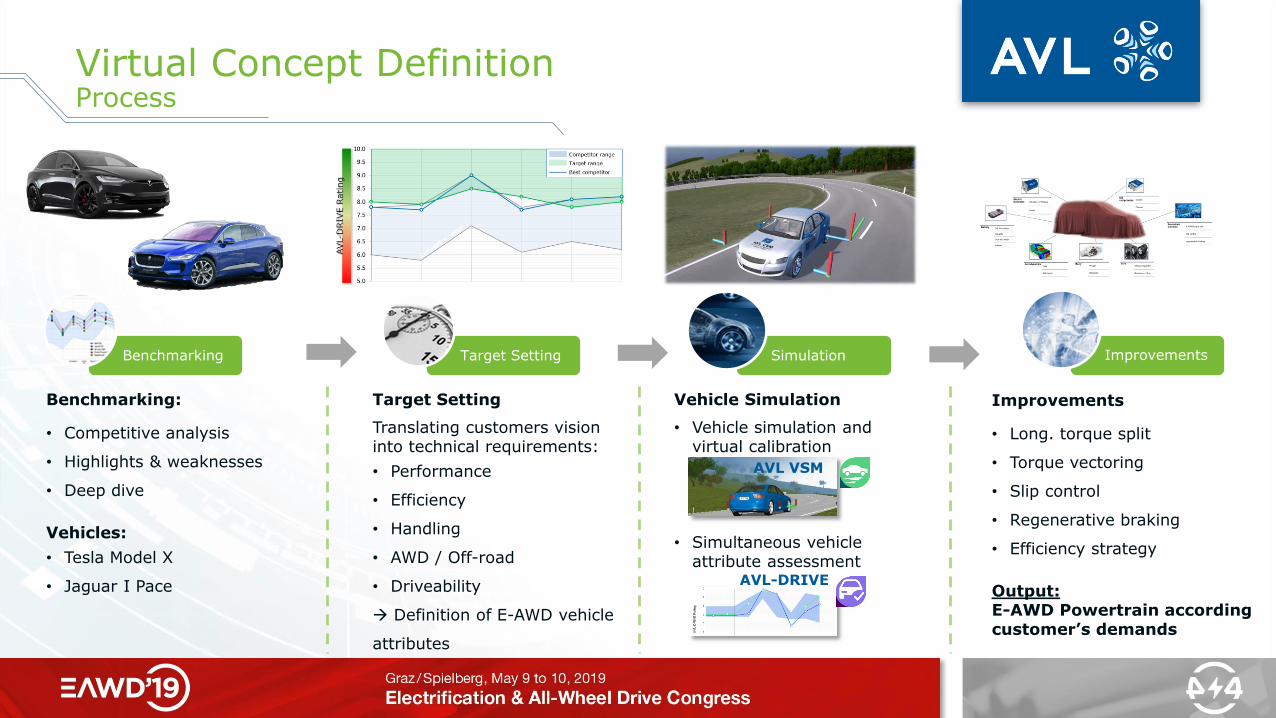
Virtual Concept DefinitionProcess
Benchmarking:
• Competitive analysis
• Highlights & weaknesses
• Deep dive
Vehicles:
• Tesla Model X
• Jaguar I Pace
Vehicle Simulation
• Vehicle simulation and virtual calibration
• Simultaneous vehicle attribute assessment
Improvements
• Long. torque split
• Torque vectoring
• Slip control
• Regenerative braking
• Efficiency strategy
Output:E-AWD Powertrain according customer’s demands
Benchmarking Target Setting Simulation Improvements
Target Setting
Translating customers vision into technical requirements:
• Performance
• Efficiency
• Handling
• AWD / Off-road
• Driveability
Definition of E-AWD vehicle
attributes
AVL VSM
AVL-DRIVE
PERFORMANCE EFFICIENCY CONTROL SYSTEMOFF-ROAD / AWD
3
4
5
6
7
8
9
10
0-100[s]
max.Accerelation
[m/s²]
max.Speed[kph]
Range[km]
Real Worlddriving
consumption[kWh/100km]
ChargingEfficiency
[%]
Gradeability dirt[%]
Control qualityHDC[DR]
Pulling Forcegravel
[N]
Brake in a turn[DR]
Acceleration µ-split
[m/s²]
TorqueInterventionCornering
[DR]
Att
ribute
Rating
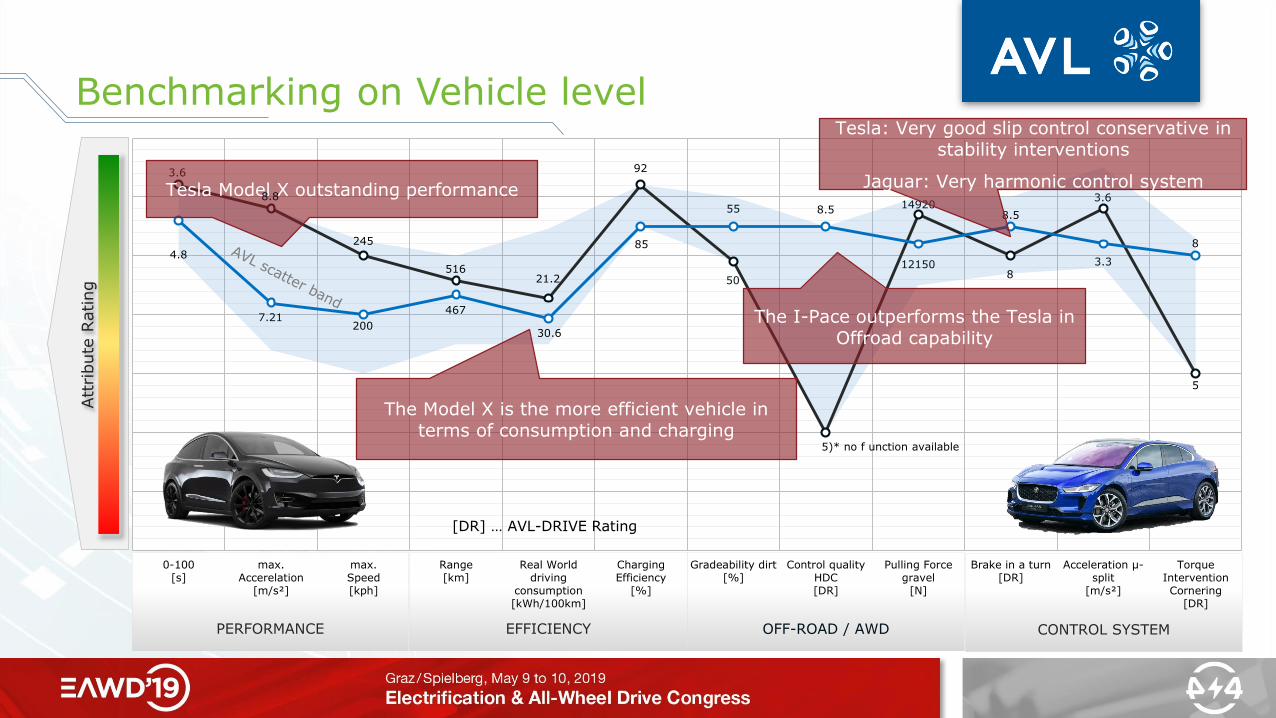
[DR] … AVL-DRIVE Rating
Benchmarking on Vehicle level
516
3.6
245
467
92
85
55
30.6
8.5
5)* no f unction available
12150
14920
4.8
2007.21
21.2
8
8.5
8
3.6
3.3
50
The I-Pace outperforms the Tesla in Offroad capability
Tesla: Very good slip control conservative in stability interventions
Jaguar: Very harmonic control systemTesla Model X outstanding performance
The Model X is the more efficient vehicle in terms of consumption and charging
5
8.8
PERFORMANCE EFFICIENCY CONTROL SYSTEMOFF-ROAD / AWD
3
4
5
6
7
8
9
10
0-100[s]
max.Accerelation
[m/s²]
max.Speed[kph]
Range[km]
Real Worlddriving
consumption[kWh/100km]
ChargingEfficiency
[%]
Gradeabilitydirt[%]
Control qualityHDC[DR]
Pulling Forcegravel
[N]
Brake in a turn[DR]
Acceleration µ-split
[m/s²]
TorqueInterventionCornering
[DR]
Att
ribute
Rating
[DR] … AVL-DRIVE Rating
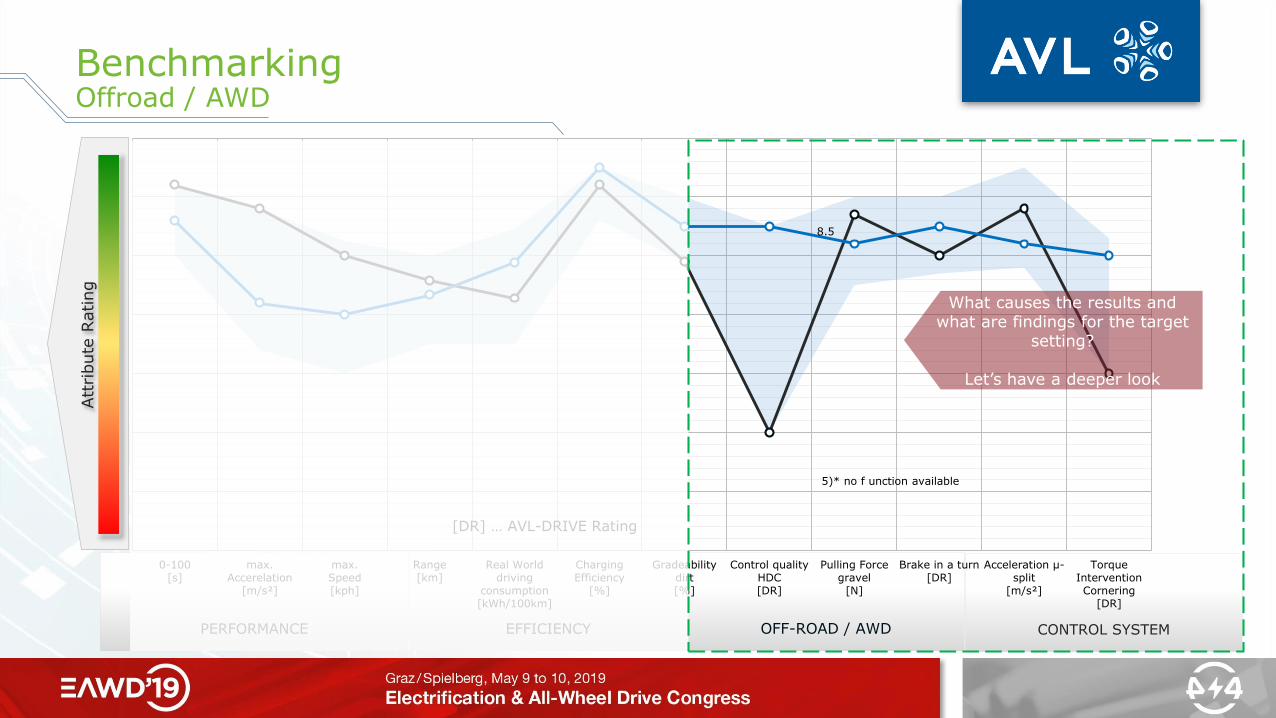
BenchmarkingOffroad / AWD
8.5
5)* no f unction available
What causes the results and what are findings for the target
setting?
Let’s have a deeper look
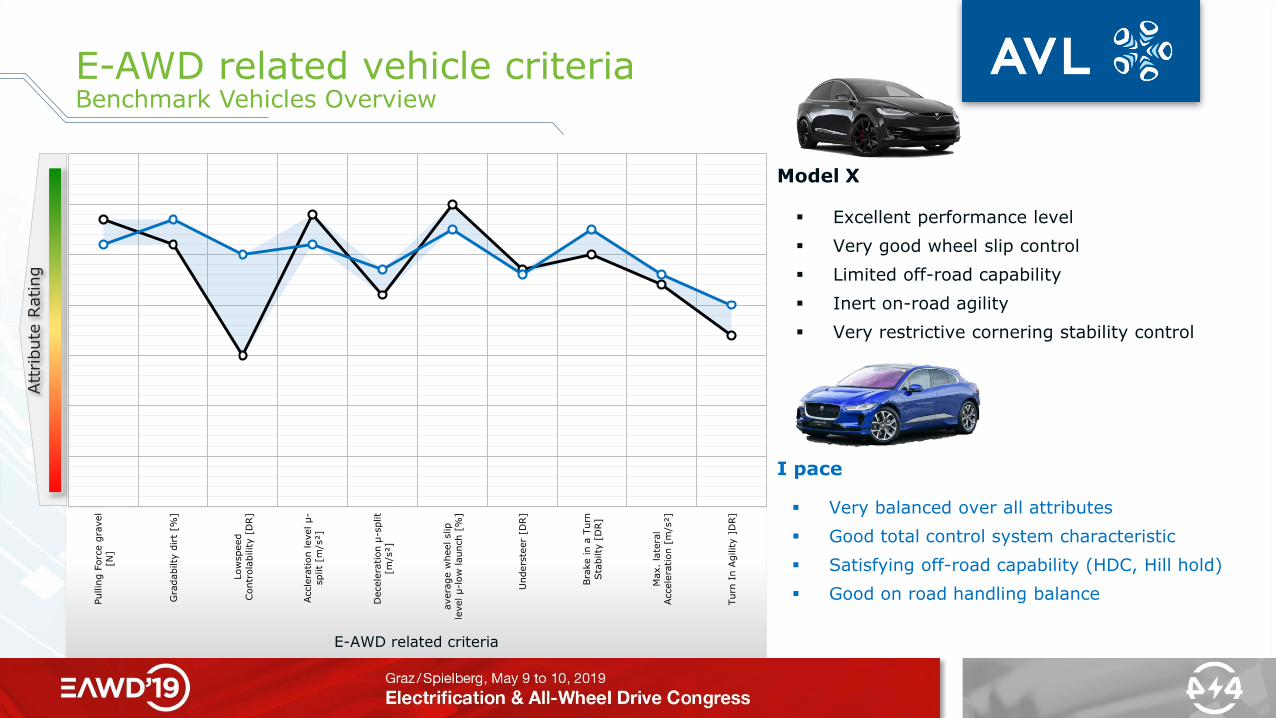
Excellent performance level
Very good wheel slip control
Limited off-road capability
Inert on-road agility
Very restrictive cornering stability control
Very balanced over all attributes
Good total control system characteristic
Satisfying off-road capability (HDC, Hill hold)
Good on road handling balance
Model X
I pace
E-AWD related vehicle criteriaBenchmark Vehicles Overview
E-AWD related criteria
3
4
5
6
7
8
9
10
Pullin
g F
orc
e g
ravel
[N]
Gra
dabilty
dirt
[%]
Low
speed
Contr
ola
bility [
DR
]
Accle
ration level µ-
split
[m/s
²]
Decele
ration µ
-split
[m/s
²]
avera
ge w
heel slip
level µ-l
ow
launch [
%]
Unders
teer
[DR
]
Bra
ke in a
Turn
Sta
bilty
[D
R]
Max.
late
ral
Accele
ration [
m/s
²]
Turn
In A
gility ]
DR]
Att
ribute
Rating
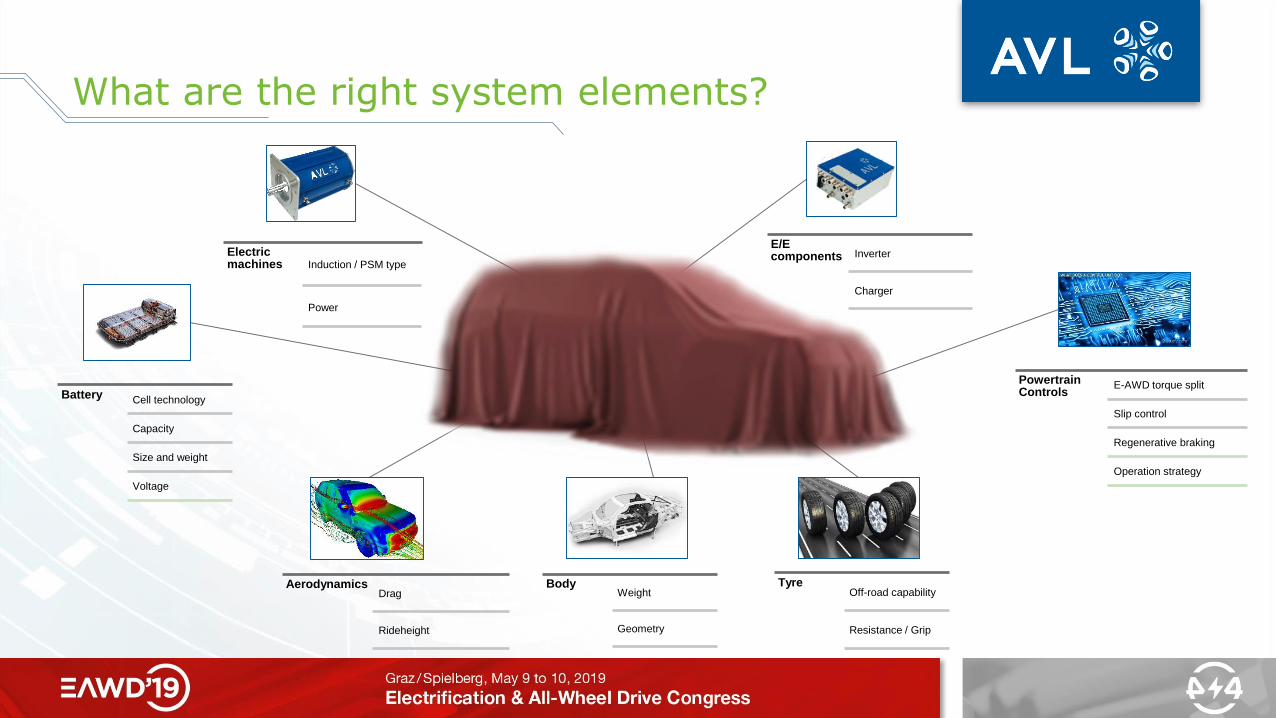
What are the right system elements?
E/E components Inverter
Charger
TyreOff-road capability
Resistance / Grip
AerodynamicsDrag
Rideheight
BodyWeight
Geometry
Electric machines Induction / PSM type
Power
Powertrain Controls
E-AWD torque split
Slip control
Regenerative braking
Operation strategy
Battery Cell technology
Capacity
Size and weight
Voltage
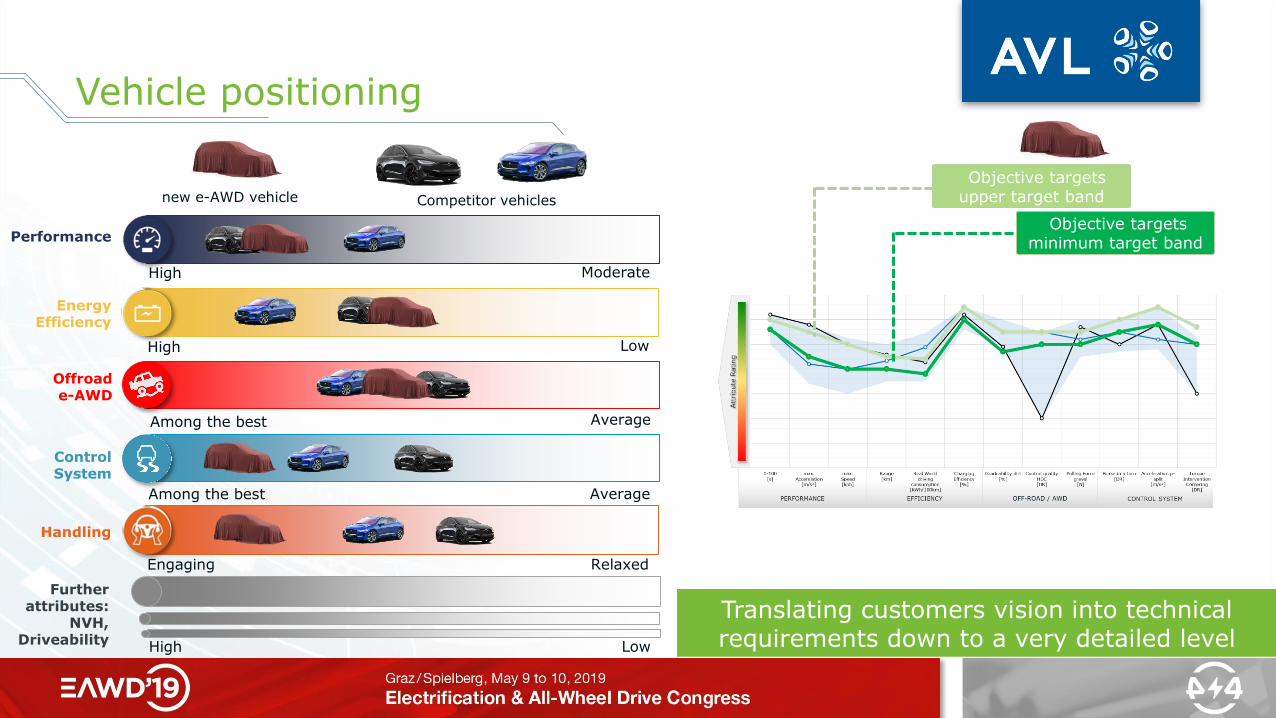
Performance
High Moderate
Engaging Relaxed
Handling
High Low
Energy Efficiency
Translating customers vision into technical requirements down to a very detailed level
Competitor vehicles
High Low
Further attributes:
NVH, Driveability
Vehicle positioning
new e-AWD vehicle
Control System
Among the best Average
Offroade-AWD
Among the best Average
Objective targets upper target band
Objective targets minimum target band
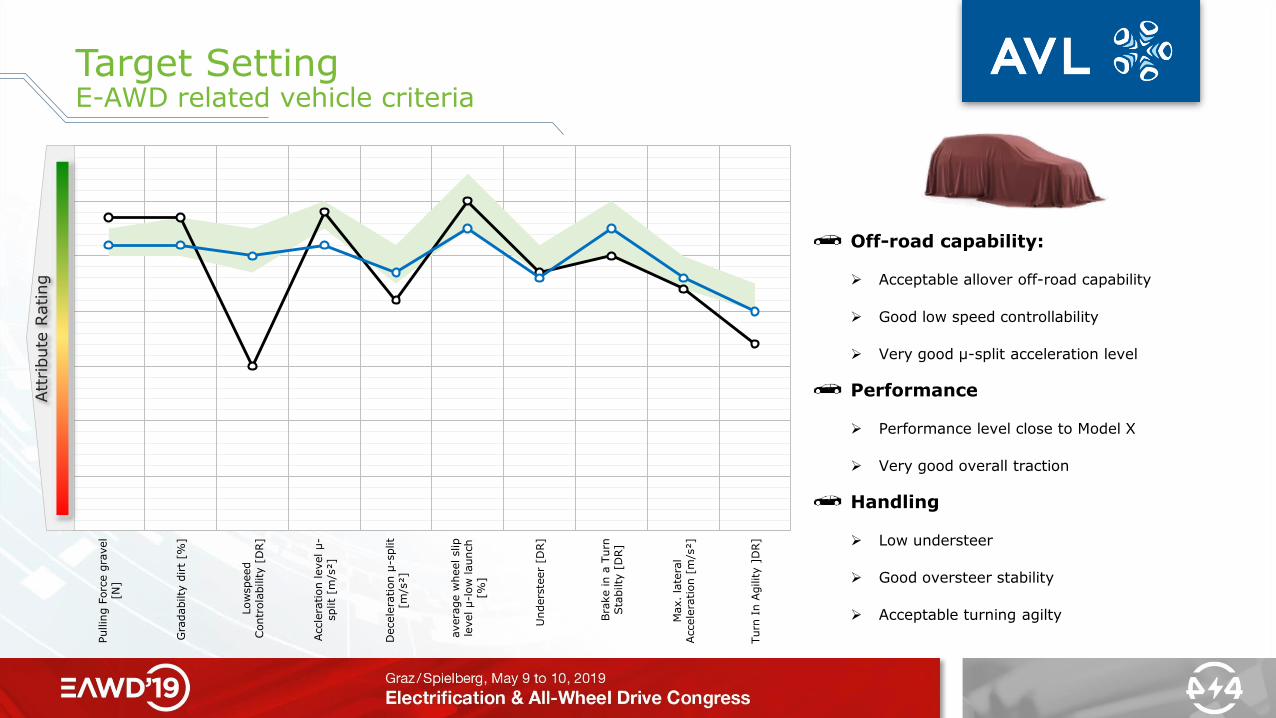
Off-road capability:
Acceptable allover off-road capability
Good low speed controllability
Very good µ-split acceleration level
Performance
Performance level close to Model X
Very good overall traction
Handling
Low understeer
Good oversteer stability
Acceptable turning agilty
Target SettingE-AWD related vehicle criteria
3
4
5
6
7
8
9
10
Pullin
g F
orc
e g
ravel
[N]
Gra
dabilty
dirt
[%]
Low
speed
Contr
ola
bility [
DR]
Accle
ration level µ-
split
[m/s
²]
Decele
ration µ
-split
[m/s
²]
avera
ge w
heel slip
level µ-l
ow
launch
[%]
Unders
teer
[DR]
Bra
ke in a
Turn
Sta
bilty
[D
R]
Max. la
tera
lAccele
ration [
m/s
²]
Turn
In A
gility ]
DR]
Att
ribute
Rating
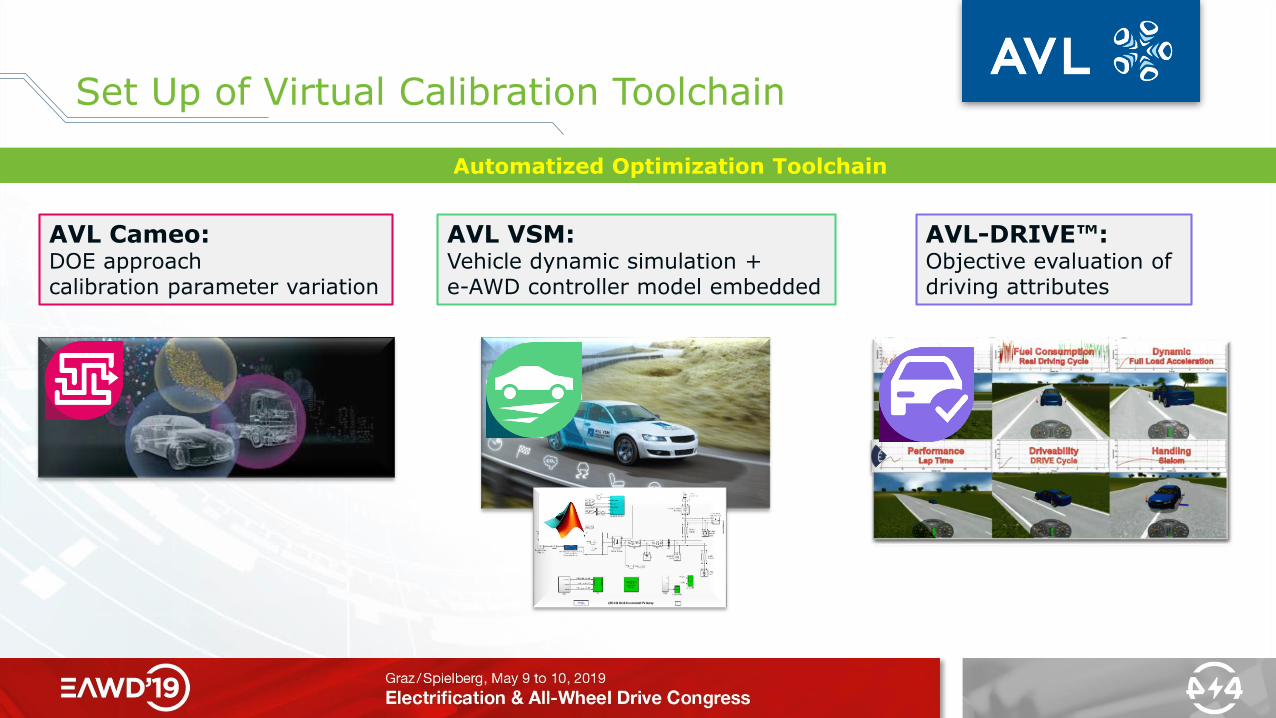
Set Up of Virtual Calibration Toolchain
Automatized Optimization Toolchain
AVL Cameo:DOE approachcalibration parameter variation
AVL VSM:Vehicle dynamic simulation +e-AWD controller model embedded
AVL-DRIVE™:Objective evaluation of driving attributes
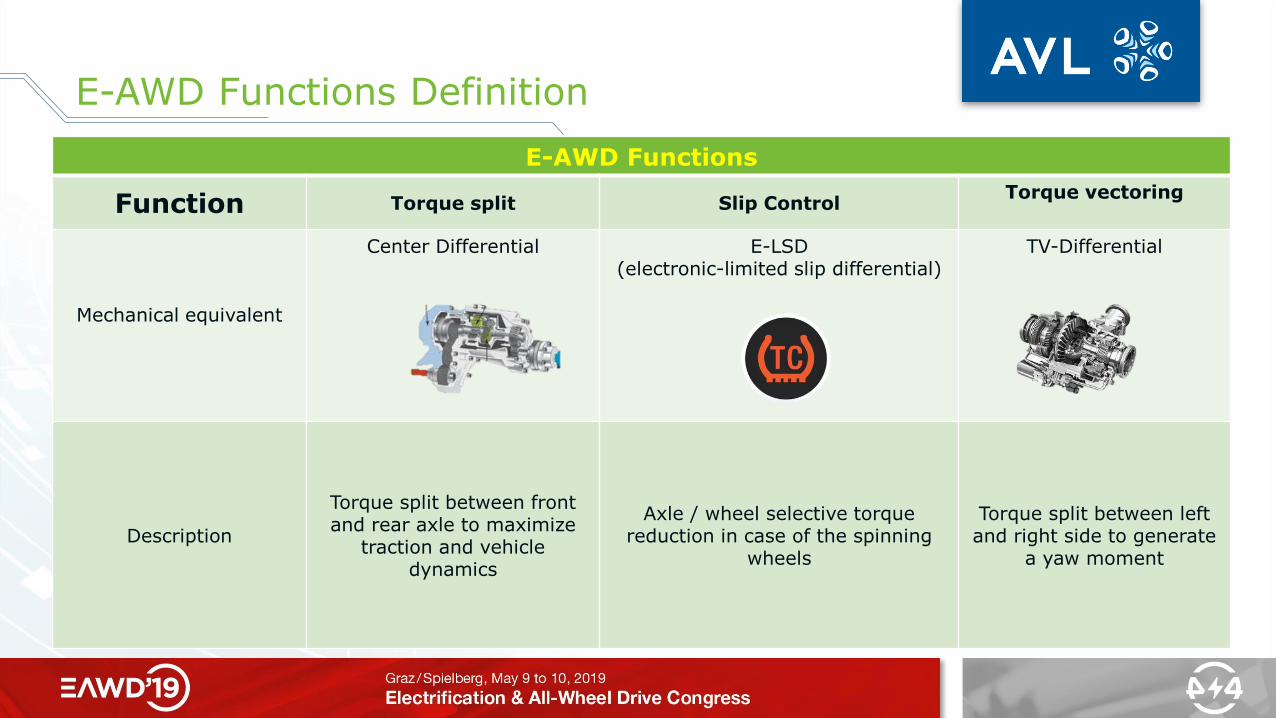
E-AWD Functions
Function Torque split Slip ControlTorque vectoring
Mechanical equivalent
Center Differential E-LSD(electronic-limited slip differential)
TV-Differential
Description
Torque split between front and rear axle to maximize
traction and vehicle dynamics
Axle / wheel selective torque reduction in case of the spinning
wheels
Torque split between left and right side to generate
a yaw moment
E-AWD Functions Definition

Virtual Calibration and Optimization
AWD CONTROLS parameter
variation
SIMULATION vehicle, driver, road
SPECIFIC MANEUVERS
Traction, Gradeability, Pulling force
ATTRIBUTES ASSESSMENT
Offroad, Handling, Performance, WLTP
Optimization
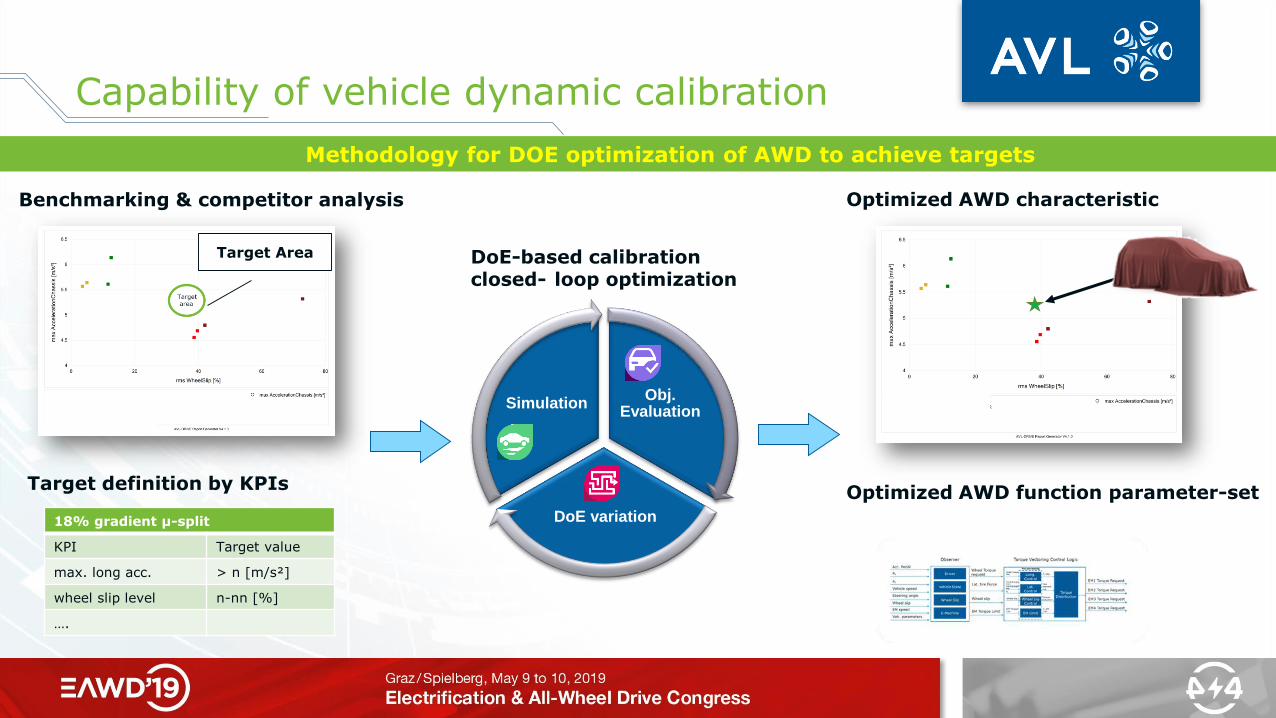
Capability of vehicle dynamic calibration
Obj. Evaluation
DoE variation
Simulation
Benchmarking & competitor analysis Optimized AWD characteristic
DoE-based calibrationclosed- loop optimization
Target definition by KPIs Optimized AWD function parameter-set
Methodology for DOE optimization of AWD to achieve targets
Target Area
18% gradient µ-split
KPI Target value
max. long acc. > n [m/s²]
wheel slip level n-nn [%]
….
Optimization Result Video e-AWD
AVL VSM
Optimization Result Video Torque Vectoring – ISO T2 Lane Change
AVL VSM
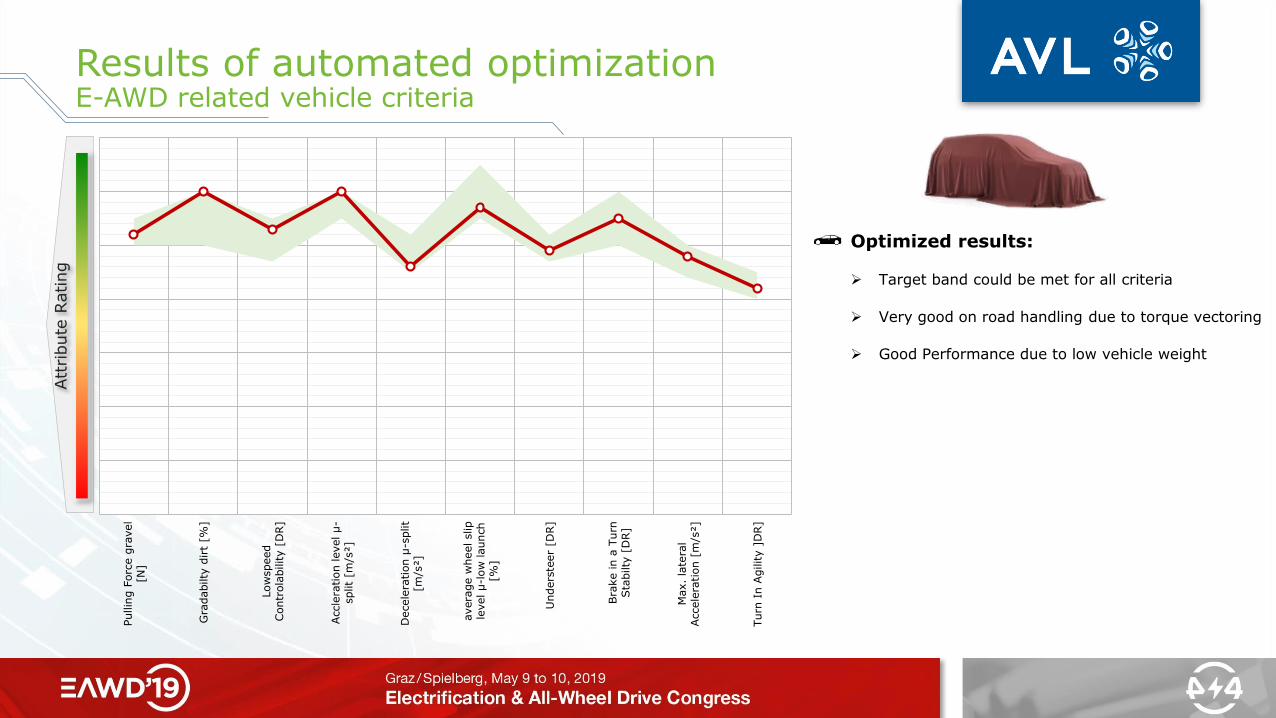
Optimized results:
Target band could be met for all criteria
Very good on road handling due to torque vectoring
Good Performance due to low vehicle weight
Results of automated optimization E-AWD related vehicle criteria
3
4
5
6
7
8
9
10Pullin
g F
orc
e g
ravel
[N]
Gra
dabilty
dirt
[%]
Low
speed
Contr
ola
bility [
DR]
Accle
ration level µ-
split
[m/s
²]
Decele
ration µ
-split
[m/s
²]
avera
ge w
heel slip
level µ-l
ow
launch
[%]
Unders
teer
[DR]
Bra
ke in a
Turn
Sta
bilty
[D
R]
Max. la
tera
lAccele
ration [
m/s
²]
Turn
In A
gility ]
DR]
Att
ribute
Rating

Optimization Result Video Nürburgring Nordschleife
AVL VSM

www.avl.com
Thank You










![AWD Profiles [Compatibility Mode]](https://img.pdfslide.net/doc/110x75/577dad331a28ab223f8ee62f/awd-profiles-compatibility-mode.jpg)

















