Embed Size (px)
Citation preview
FUNCIONES DE DOS VARIABLES
• 1- Funciones de dos variables reales
• 2- Límites
• 3- Continuidad de funciones de dos variables
• 4- Derivabilidad de funciones de dos variables
• 5- Diferenciabilidad de funciones de dos variables
• 6- Derivada direccional. Vector gradiente
• 7- Derivada de la función compuesta. Regla de la cadena
• 8- Derivadas parciales de orden superior
• 9- Funciones implícitas
• 10- Extremos de funciones de dos variables
• 11- Extremos de funciones de dos variables con ligaduras
FUNCIONES REALES DE DOS VARIABLES REALES
DefiniciónUna función real de n variables reales es una aplicación
f: DŒ Ñn ö Ñ que hace corresponder a cada n-úpla
(x1,x2,...,xn) e D un número real z e Ñ
f: D Œ Ñn ö Ñ
(x1,x2,...,xn) ö z=f (x1,x2,...,xn)
Ejemplos: f : Ñ3 ö Ñ
(x1,x2,x3) ö z =
g: Ñ2 ö Ñ
g (x,y) ö z = 2x+3y
D= dominio de definición de f
2
3
2
2
2
1 xxx ++
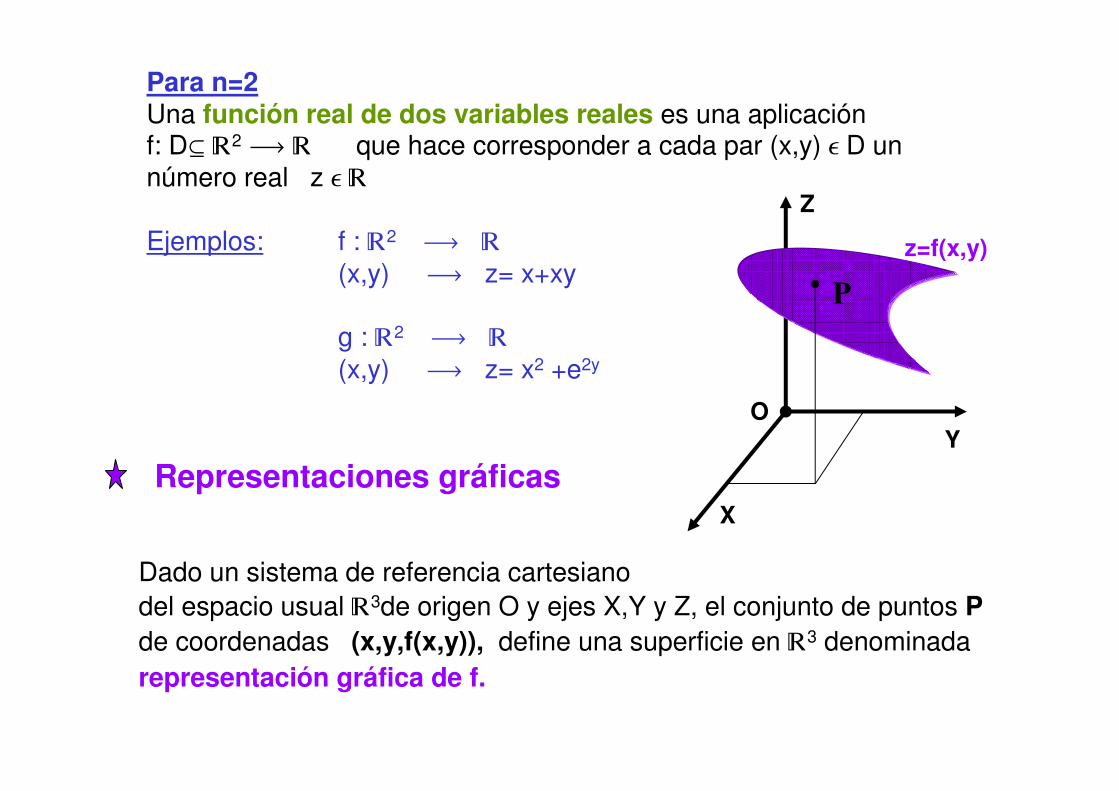
Para n=2Una función real de dos variables reales es una aplicaciónf: DŒ Ñ2 ö Ñ que hace corresponder a cada par (x,y) e D un número real z e Ñ
Ejemplos: f : Ñ2 ö Ñ
(x,y) ö z= x+xy
g : Ñ2 ö Ñ
(x,y) ö z= x2 +e2y
Representaciones gráficas
Dado un sistema de referencia cartesiano
del espacio usual Ñ3de origen O y ejes X,Y y Z, el conjunto de puntos Pde coordenadas (x,y,f(x,y)), define una superficie en Ñ3 denominada
representación gráfica de f.
O
X
Y
Z
P
z=f(x,y)

CURVAS DE NIVEL
Sea f: DŒ Ñ2 ö Ñ
Definición
Se llama curva de nivel m al conjunto
}my)f(x,/Dy)(x,{Cm =∈=
El conjunto Cm representa gráficamente la proyección
ortogonal, sobre el plano z=0, de la intersección de la
superficie de ecuación z=f(x,y) y el plano horizontal de
ecuación z=m.

LÍMITES
Sea f: D Œ Ñ2 ö Ñ y (x0,y0) un punto de acumulación
de D
Definición � e Ñ es el límite de f en el punto (x0,y0) si
se escribe:
∗∗ No es necesario que la función esté definida en el punto x0 sino en infinitos puntos a su alrededor
ε<−
⇒δ<−+−<∈∀>δ∃>ε∀ εε
�)y,x(f
)yy()xx(0:D)y,x(/00 20
20
�=→
)y,x(flim)y,x()y,x( 00

O
X
Y
Z
z=f(x,y)���� + e����
� � � � - e
(x0,y0)

DefiniciónSe llaman límites reiterados de f a los límites definidos por:
si es que existen.
Proposición
Si existe , es único
Proposición
Sean f y g dos funciones tales que:
1º) f está acotada en unentorno de (x0,y0)
2º)
→→
y)f(x,limlim00 xxyy
→→
y)f(x,limlim00 yyxx
�=→
)y,x(flim)y,x()y,x( 00
0)y,x(glim)y,x()y,x( 00
=→
0)]y,x(g)y,x(f[lim)y,x()y,x( 00
=→
entonces,
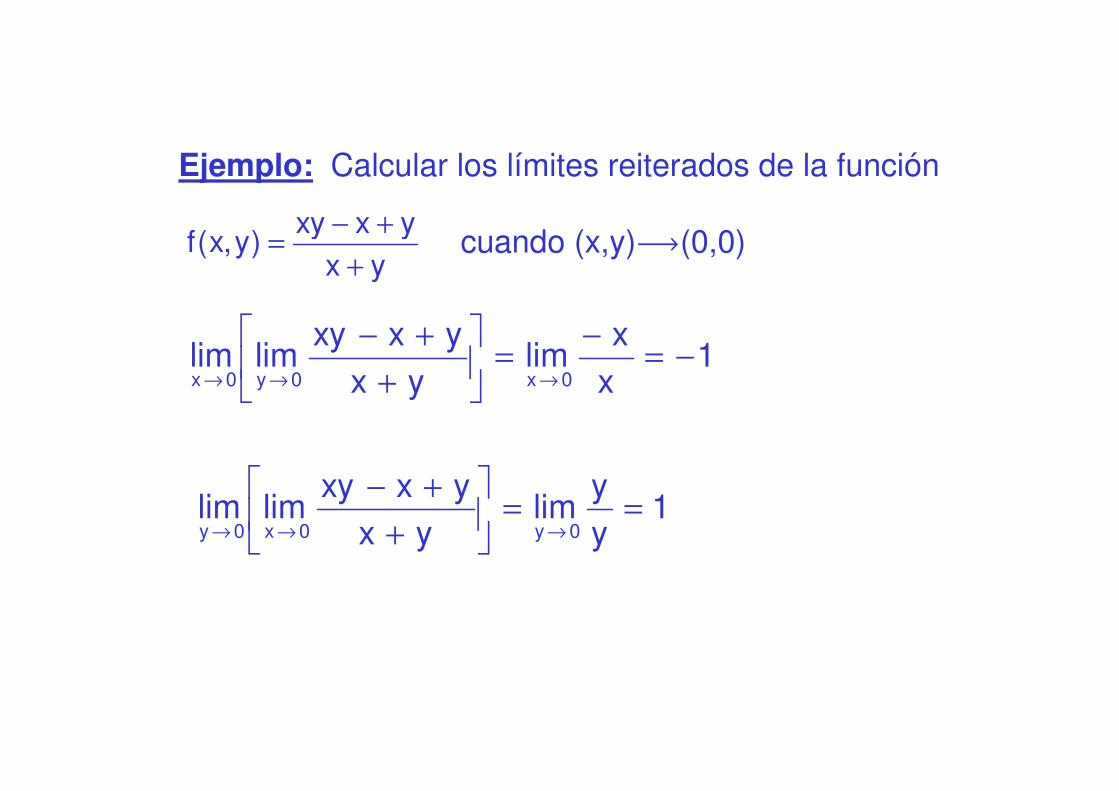
Ejemplo: Calcular los límites reiterados de la función
cuando (x,y)ö(0,0)xy x y
f(x,y)x y
− +=
+
1x
xlim
yx
yxxylimlim
0x0y0x−=
−=
+
+−→→→
1y
ylim
yx
yxxylimlim
0y0x0y==
+
+−→→→

Proposición
1º) Para que exista el el valor �
se debe obtener cualquiera que sea el camino por el que nos acerquemos a (x0,y0)
2º) Si existen y
es condición necesaria para que exista el
que los límites reiterados
coincidan y sean �
→→
y)f(x,limlim00 xxyy
→→
y)f(x,limlim00 yyxx
�=→
)y,x(flim)y,x()y,x( 00
�=→
)y,x(flim)y,x()y,x( 00

Esto quiere decir que:
Si ∫ entonces
no existe
La función tiene límites reiterados distintos en (0,0)
→→
y)f(x,limlim00 xxyy
→→
y)f(x,limlim00 yyxx
�=→
)y,x(flim)y,x()y,x( 00
22
2
yx
yxy)y,x(f
+
+=
11limy
ylim
yx
yxylimlim
00limx
0lim
yx
yxylimlim
0y2
2
0y22
2
0x0y
0x20x22
2
0y0x
===
+
+
===
+
+
→→→→
→→→→
Por tanto no existe el 22
2
)0,0()y,x( yx
yxylim
+
+→
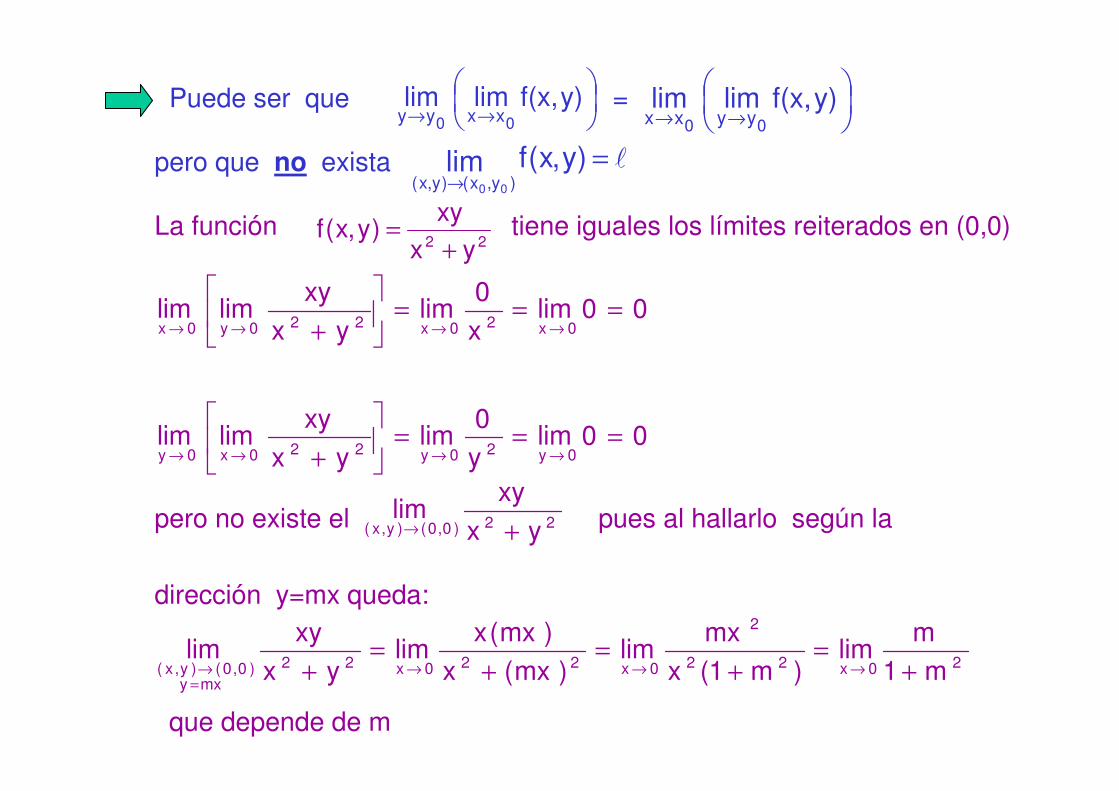
Puede ser que =
pero que no exista
La función tiene iguales los límites reiterados en (0,0)
→→
y)f(x,limlim00 xxyy
→→
y)f(x,limlim00 yyxx
�=→
)y,x(flim)y,x()y,x( 00
22 yx
xy)y,x(f
+=
00limy
0lim
yx
xylimlim
00limx
0lim
yx
xylimlim
0y20y220x0y
0x20x220y0x
===
+
===
+
→→→→
→→→→
pero no existe el pues al hallarlo según la
dirección y=mx queda:
22)0,0()y,x( yx
xylim
+→
20x22
2
0x220x22
mxy)0,0()y,x( m1
mlim
)m1(x
mxlim
)mx(x
)mx(xlim
yx
xylim
+=
+=
+=
+ →→→=→
que depende de m
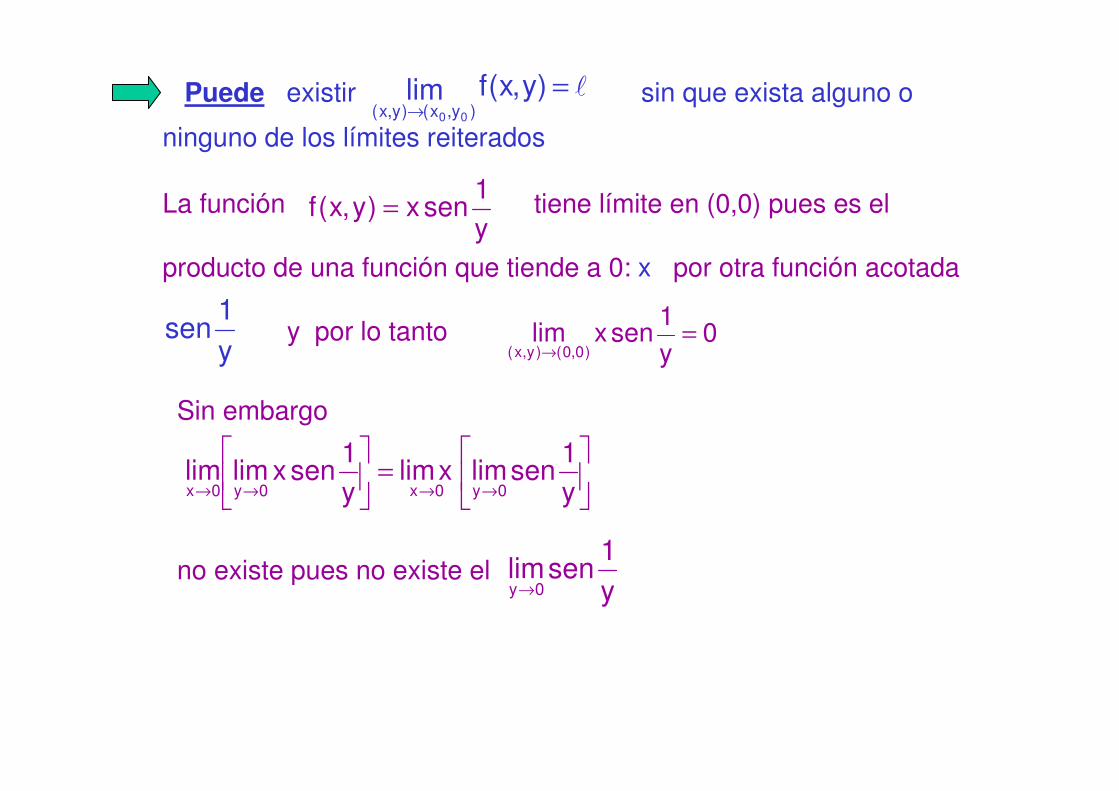
Puede existir sin que exista alguno o
ninguno de los límites reiterados
La función tiene límite en (0,0) pues es el
producto de una función que tiende a 0: x por otra función acotada
y por lo tanto
�=→
)y,x(flim)y,x()y,x( 00
y
1senx)y,x(f =
y
1sen 0
y
1senxlim
)0,0()y,x(=
→
Sin embargo
no existe pues no existe el
=
→→→→ y
1senlimxlim
y
1senxlimlim
0y0x0y0x
y
1senlim
0y→

Coordenadas polares de un punto
O x X
Y
y P(x,y)
q
Cartesianas (x,y)
Polares ( r, q )r
2 2x yρ = +
yarctg / ( , ]
x= ∈ −θ θ π π
Ecuaciones del cambio:x=r cos qy=r sen q

CONTINUIDAD
Sea f: D Œ Ñ2 ö Ñ y (x0,y0) un punto de D
Definición f es continua en el punto (x0,y0) si
Definición f es continua en un conjunto AŒ D si es continua en cada punto de A
Proposición
)y,x(f)y,x(flim 00)y,x()y,x( 00
=→
Si la función f es continua en (x0,y0), entonces existe un número
real tal que la función f está acotada en el conjunto D((x0,y0),d)…D.
es decir, f está acotada en un entorno del punto (x0,y0)
0>δ
Proposición Si dos funciones f y g son continuas en el punto (x0,y0), entonces las funciones f+g, f-g y f.g son también funciones continuas en (x0,y0).Además, si g(x0,y0)∫0, entonces la función f/g es también una función
continua en (x0,y0).
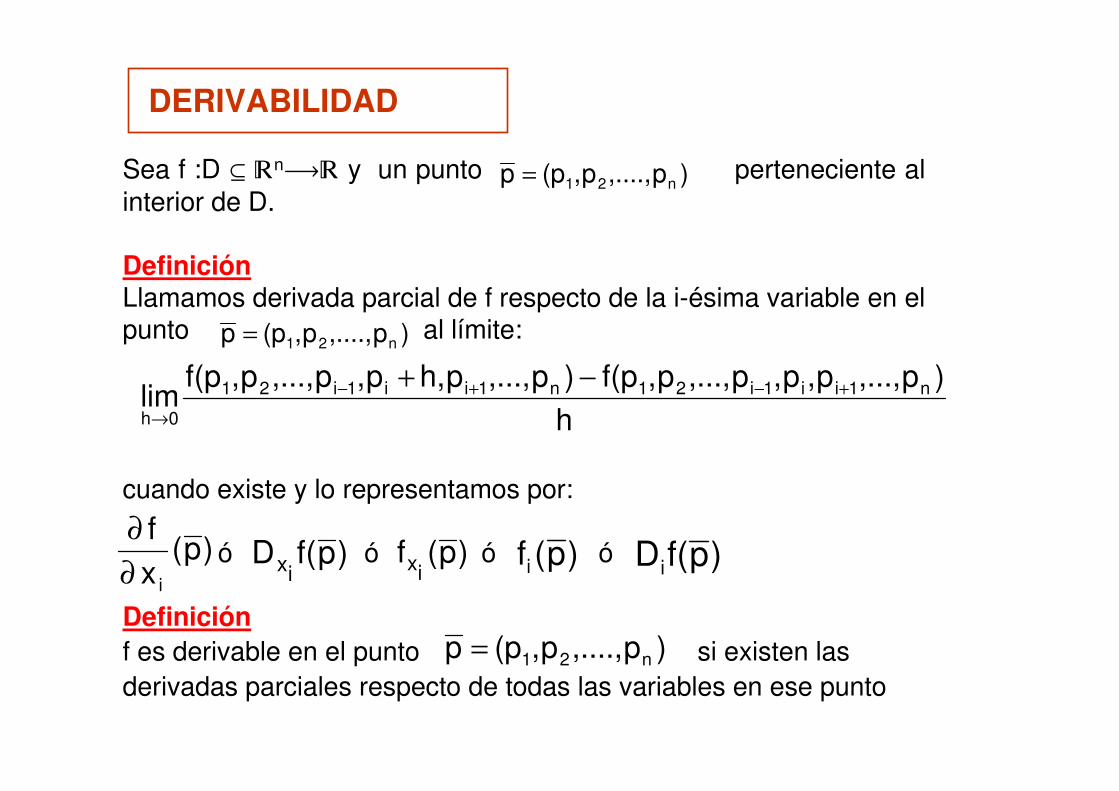
DERIVABILIDAD
Sea f :D Œ ÑnöÑ y un punto perteneciente al
interior de D.
DefiniciónLlamamos derivada parcial de f respecto de la i-ésima variable en el punto al límite:
cuando existe y lo representamos por:
ó ó ó ó
Definiciónf es derivable en el punto si existen las
derivadas parciales respecto de todas las variables en ese punto
)p,....,p,(pp n21=
)p,....,p,(pp n21=
h
)p,...,p,p,p,...,p,f(p)p,...,ph,p,p,...,p,f(plim n1ii1i21n1ii1i21
0h
+−+−
→
−+
)p(x
f
i∂
∂)pf(D
ix )pf(Di)p(f
ix )p(fi
)p,....,p,(pp n21=

Para hallar la derivada parcial respecto de la variable xi:
en un punto , se deriva f respecto esa variable
considerando constantes el resto de las variables y posteriormente se
asignan los valores p1,p2,...,pn a las variables x1,x2,...,xn
respectivamente.
Ejemplo: f(x,y,z)= x3z +x seny – ln(x+z)
)p(x
f
i∂
∂
)p,...,p,p(p n21=
]
2
1
2
11
zx
1x)1,0,1(
z
f
1ycosx)1,0,1(y
f
2
5
2
13
zx
1senyzx3)1,0,1(
x
f
)1,0,1(
3
)1,0,1(
)01,1(
2
=−=
+−=
∂
∂
==∂
∂
=−=
+−+=
∂
∂
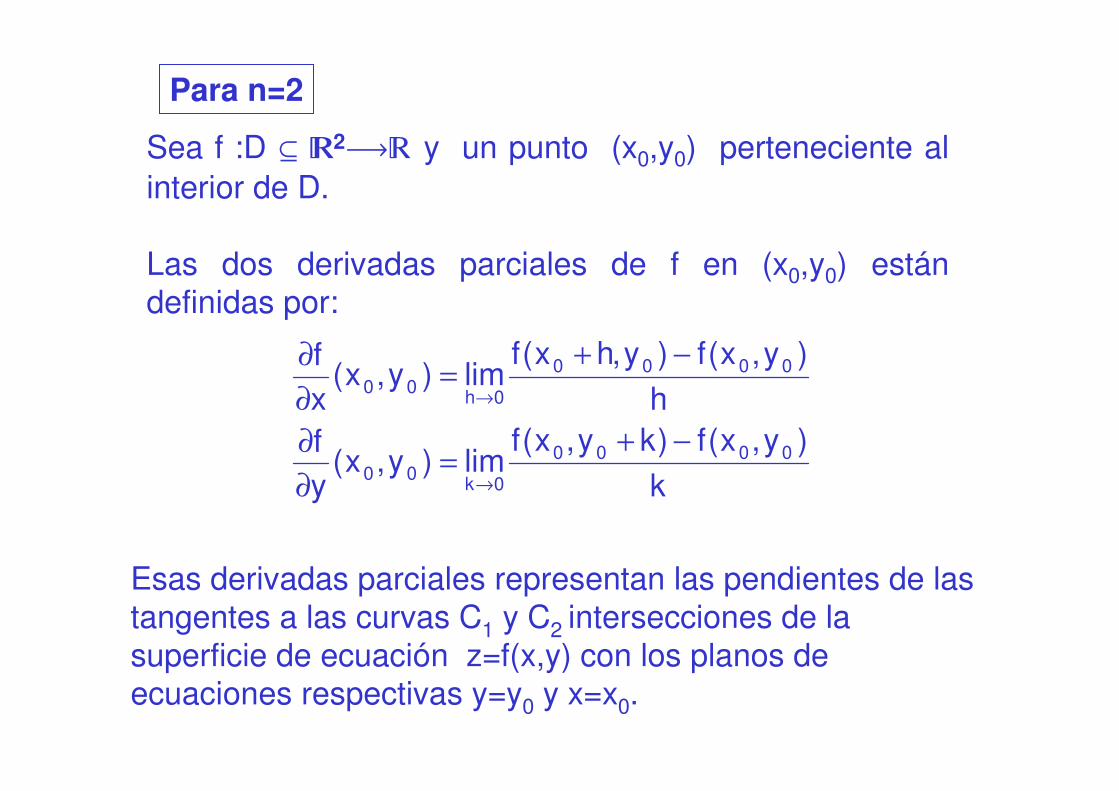
Sea f :D Œ Ñ2öÑ y un punto (x0,y0) perteneciente al
interior de D.
Las dos derivadas parciales de f en (x0,y0) están definidas por:
k
)y,x(f)ky,x(flim)y,x(
y
f
h
)y,x(f)y,hx(flim)y,x(
x
f
0000
0k00
0000
0h00
−+=
∂
∂
−+=
∂
∂
→
→
Esas derivadas parciales representan las pendientes de las tangentes a las curvas C1 y C2 intersecciones de la superficie de ecuación z=f(x,y) con los planos de ecuaciones respectivas y=y0 y x=x0.
Para n=2

Definición
Sea f :D Œ ÑnöÑ y un punto perteneciente a D.
Se denomina función derivada parcial de f respecto de la i-ésima
variable denotada ó ó ó fi ó Dif , a la aplicación
que hace corresponder a cada punto la derivada parcial de f respecto de esa variable en .
Ejemplo: f(x,y,z)= x3z +x seny – ln(x+z)
ix
f
∂
∂ fDix
ixf
)p,....,p,(pp n21=
p
p
zx
1x
z
f
ycosxy
f
zx
1senyzx3
x
f
3
2
+−=
∂
∂
=∂
∂
+−+=
∂
∂

Definición
Sea f :D Œ ÑnöÑ y un punto perteneciente a D.
Se denomina función derivada parcial segunda de f respecto de las
variables xi y xj y se denota ó ó
ó ó , a la derivada parcial de respecto de la
variable xj en el punto .
)p(xx
f
ji
2
∂∂
∂)pf(D
jxix
)p(fj
xix
)p,....,p,(pp n21=
p
)p(f ij)p(fDij
ix
f
∂
∂
Análogamente se definen las derivadas parciales de órdenes superiores

Ejemplo: f(x,y,z)= x3z +x seny – ln(x+z)
zx
1x
z
f
ycosxy
f
zx
1senyzx3
x
f
3
2
+−=
∂
∂
=∂
∂
+−+=
∂
∂
Hallar: en el punto (1,1,1)2 2 3
2 2
f f f, ,
x y x z x
∂ ∂ ∂
∂ ∂ ∂ ∂ ∂
]
4
23
)zx(
2x6
)zx(
1x3D
zx
1xDD
xz
f
4
25
)zx(
1xz6
zx
1senyzx3D
x
f
1cosycoszx
1senyzx3D
yx
f
)1,1,1(
3
)1,1,1(
2x
)1,1,1(
3xx2
3
)1,1,1(
2)1,1,1(
2x2
2
)1,1,1(
)1,1,1(
2y
2
2=
+−=
++=
+−=
∂∂
∂
=
++=
+−+=
∂
∂
==
+−+=
∂∂
∂

Proposición Si f y g son funciones derivables en el punto , entonces f+g, f-g, f.g, también son derivables en y si
también lo es la función f/g.
Teorema de SchwarzSea f :D Œ Ñ2öÑ y un punto (x0,y0) de D.
Si existen las derivadas parciales en un
entorno del punto (x0,y0) y es continua en (x0,y0),
entonces existe en el punto (x0,y0) y se
cumple que:
pp 0)p(g ≠
yx
fy
y
f,
x
f 2
∂∂
∂
∂
∂
∂
∂
yx
f2
∂∂
∂
xy
f2
∂∂
∂
)y,x(yx
f)y,x(
xy
f00
2
00
2
∂∂
∂=
∂∂
∂
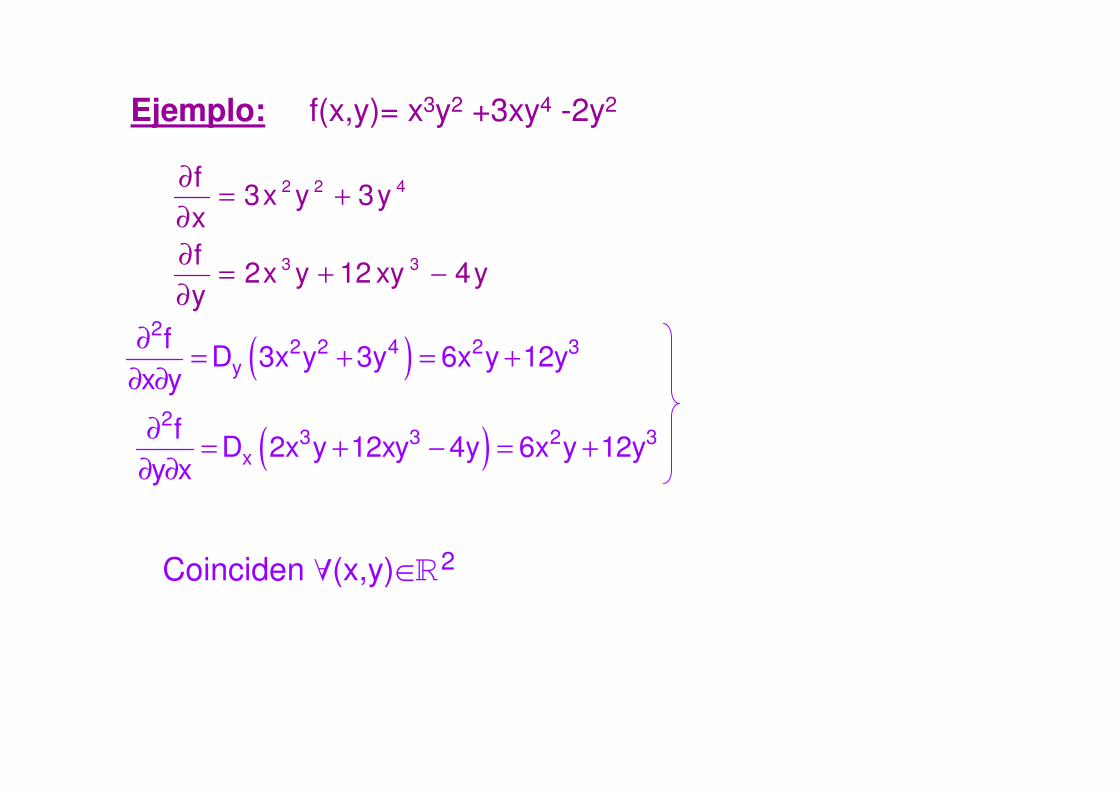
Ejemplo: f(x,y)= x3y2 +3xy4 -2y2
y4xy12yx2y
f
y3yx3x
f
33
422
−+=∂
∂
+=∂
∂
( )
( )
22 2 4 2 3
y
23 3 2 3
x
fD 3x y 3y 6x y 12y
x y
fD 2x y 12xy 4y 6x y 12y
y x
∂= + = +
∂ ∂
∂= + − = +
∂ ∂
Coinciden "(x,y)τ2

Definición
Sea f :D Œ Ñ2öÑ
f es de clase Cm en un abierto A ΠD, si existen todas las derivadas parciales hasta el orden m en A, y esas derivadas parciales son continuas en A.
f es de clase Cm en un punto si existe un abierto
A ΠD tal que y f es de clase Cm en A.
Dp ∈
Ap ∈
DIFERENCIALES
Sea f: D Œ Ñ2 ö Ñ y (x0,y0) un punto del interior de D
Definiciónf es diferenciable en (x0,y0) si existe una aplicación lineal
L: Ñ2 ö Ñ tal que:
Si f es diferenciable en (x0,y0) la aplicación lineal L es única ,se llama diferencial de f en (x0,y0) y se representa df (x0,y0)
0 0 0 0
2 2(h,k ) (0,0)
f(x h,y k) f(x ,y ) L(h,k)lim 0
h k→
+ + − −=
+
Proposición
Si existen las derivadas parciales en un
entorno del punto (x0,y0) y son continuas en (x0,y0), entonces f es diferenciable en el punto (x0,y0)
y
fy
x
f
∂
∂
∂
∂

Si f es diferenciable se llama diferencial total de f a laexpresión:
Si f no es diferenciable esta expresión no tiene ningún sentido
Se llaman diferenciales parciales de f a las expresiones:
x y
f fd f dx, d f dy
x y
∂ ∂= =
∂ ∂
f fdf dx dy
x y
∂ ∂= +
∂ ∂
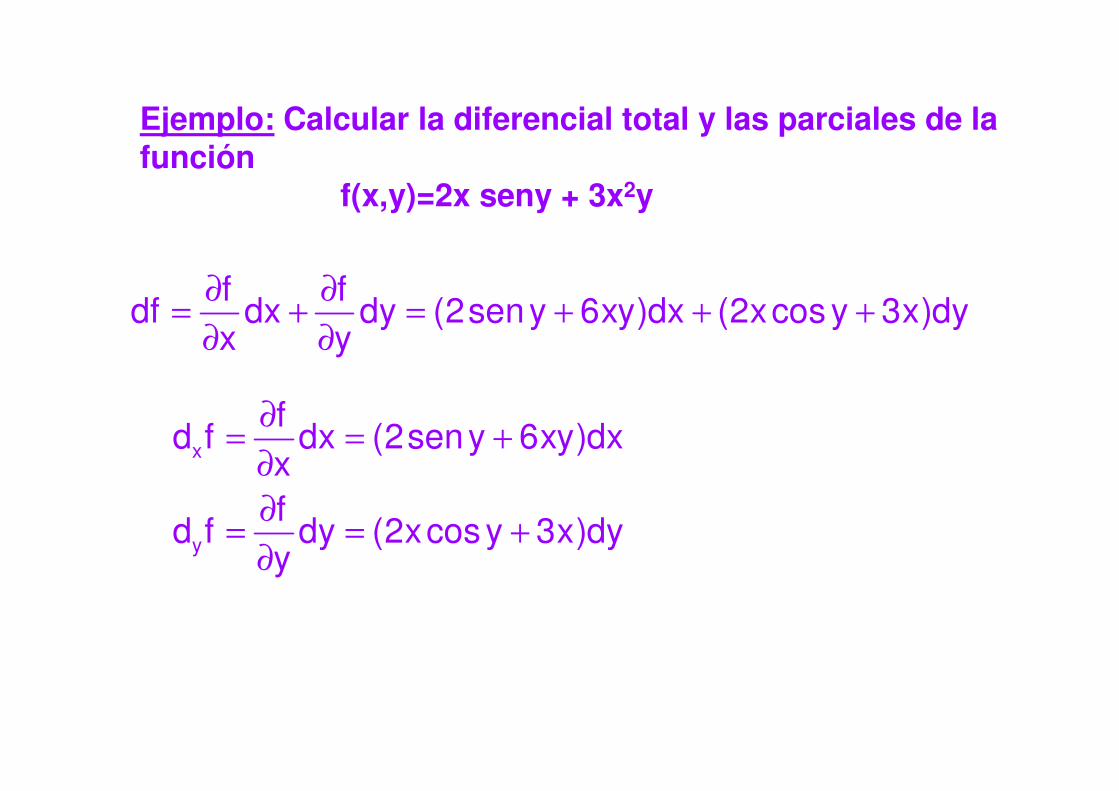
f fdf dx dy (2seny 6xy)dx (2xcos y 3x)dy
x y
∂ ∂= + = + + +
∂ ∂
x
y
fd f dx (2seny 6xy)dx
x
fd f dy (2xcosy 3x)dy
y
∂= = +
∂
∂= = +
∂
Ejemplo: Calcular la diferencial total y las parciales de la función
f(x,y)=2x seny + 3x2y

Proposición
Si f y g son funciones diferenciables en el punto ,
entonces f+g, f-g, f.g, también son diferenciables en
y si también lo es la función f/g.
p
p
0)p(g ≠
Proposición
Si f es diferenciable en (x0,y0) entonces f es continua y derivable en (x0, y0)
!! f derivable î f diferenciable !!
ProposiciónSea z=f(x,y) la ecuación de una superficie S definida en
un cierto dominio D.S tiene plano tangente en un punto (a,b,f(a,b)) de S si y
sólo si la función f es diferenciable en el punto (a,b).
La ecuación del plano tangente a S en el punto (a,b,f(a,b)) es
f fz (a,b) (x a) (a,b) (y b) f(a,b)
x y
∂ ∂= − + − + ∂ ∂

Ejemplo: Hallar la ecuación del plano tangente al paraboloide elíptico
de ecuación en el punto (2,0,1)6
y
4
xz
22
+=
f fz (a,b) (x a) (a,b) (y b) f(a,b)
x y
∂ ∂= − + − + ∂ ∂
03
y)0,2(
y
f
12
x)0,2(
x
f
)0,2(
)0,2(
=
=
∂
∂
=
=
∂
∂
Luego la ecuación del plano es: z = 1(x-2)+0(y-0)+1
Es decir: z = x-1

DERIVADA DE LA FUNCIÓN COMPUESTAREGLA DE LA CADENA
Sea z = f(u,v), donde u=u(x,y), y v=v(x,y).
Las derivadas parciales se pueden calcular haciendo la sustitución o bien con las siguientes fórmulas:
f f u f v
x u x v x
f f u f v
y u y v y
∂ ∂ ∂ ∂ ∂= +
∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂= +
∂ ∂ ∂ ∂ ∂

Ejemplo 1: Dada la función
z = 2u sen v donde
Hallar
u = ln(xy)v = xy
z zy
x y
∂ ∂
∂ ∂
z f u f v 12senv. 2ucosv.y
x u x v x x
z f u f v 12senv. 2ucosv.x
y u y v y y
∂ ∂ ∂ ∂ ∂= + = +
∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂= + = +
∂ ∂ ∂ ∂ ∂

Ejemplo 2: Dada la función
z = x2y –y2 donde
Hallar cuando t=0
x = senty =et
dz
dt
2 tdz z dx z dy2xy.cos t (x 2y)e
dt x dt y dt
∂ ∂= + = + −
∂ ∂
Para t=0 î x = sen0 = 0 Ÿ y= e0 =1
y por tanto
t 0
dz2
dt =
= −

Sean f :D Œ Ñnö Ñ y un punto
perteneciente al interior de D
Definición
Llamamos gradiente de f en el punto
y lo representamos por al vector definido por:
)p,....,p,(pp n21=
)p,....,p,(pp n21=
f(p)∇
1 2 n
f f ff(p) (p), (p), , (p)
x x x
∂ ∂ ∂∇ =
∂ ∂ ∂ …
GRADIENTE DE UNA FUNCIÓN

Sea f :D Œ ÑnöÑ , un punto
perteneciente al interior de D y un vector
Definición
Llamamos derivada de f según el vector en el punto
al límite:
si existe.
Se representa
Si es un vector unitario, a este límite se le llama
derivada direccional de f según el vector en el punto
)p,....,p,(pp n21=
)p,....,p,(pp n21=
t 0
f(p tv) f(p)lim
t→
+ −
v
f(p) = D f(p)
v
∂
∂
v
{ }nv 0∈ −�
1 2 nv (v ,v , ,v )= �
v p

Ejemplo: Hallar la derivada de la función
f(x,y,z)= x2z +x y en el punto (1,1,1) según el vector
)1,0,1(v −=
t 0
t 0
2
t 0 t 0
3 2
t 0
f f(p tv) f(p)(1,1,1) lim
v t
f[(1,1,1) t(1,0, 1)] f(1,1,1)lim
t
f(1 t,1,1- t) 2 (1 t) (1 t) (1 t) 2lim lim
t t
t 3t 4tlim 4
t
→
→
→ →
→
∂ + −= =
∂
+ − −= =
+ − + − + + −= = =
+ += =

Sean f :D Œ Ñ2öÑ y un punto perteneciente al
interior de D
Propiedades El gradiente de f en el punto es ortogonal en a la curva de
nivel que pasa por ese punto
El vector gradiente define la dirección, el sentido y la magnitud de la máxima pendiente, es decir, la dirección según la cual la derivada direccional es máxima
Las derivadas parciales son derivadas direccionales respecto a los vectores de la base canónica
La derivada direccional se puede escribir como el producto escalar del vector gradiente por un vector unitario
1 2p (p ,p )=
p
f(p)∇
p
v
vD f(p) = f(p).v∇1 2 n
1 2 n
f f f= (p)v (p)v (p)v
x x x
∂ ∂ ∂+ + +
∂ ∂ ∂�
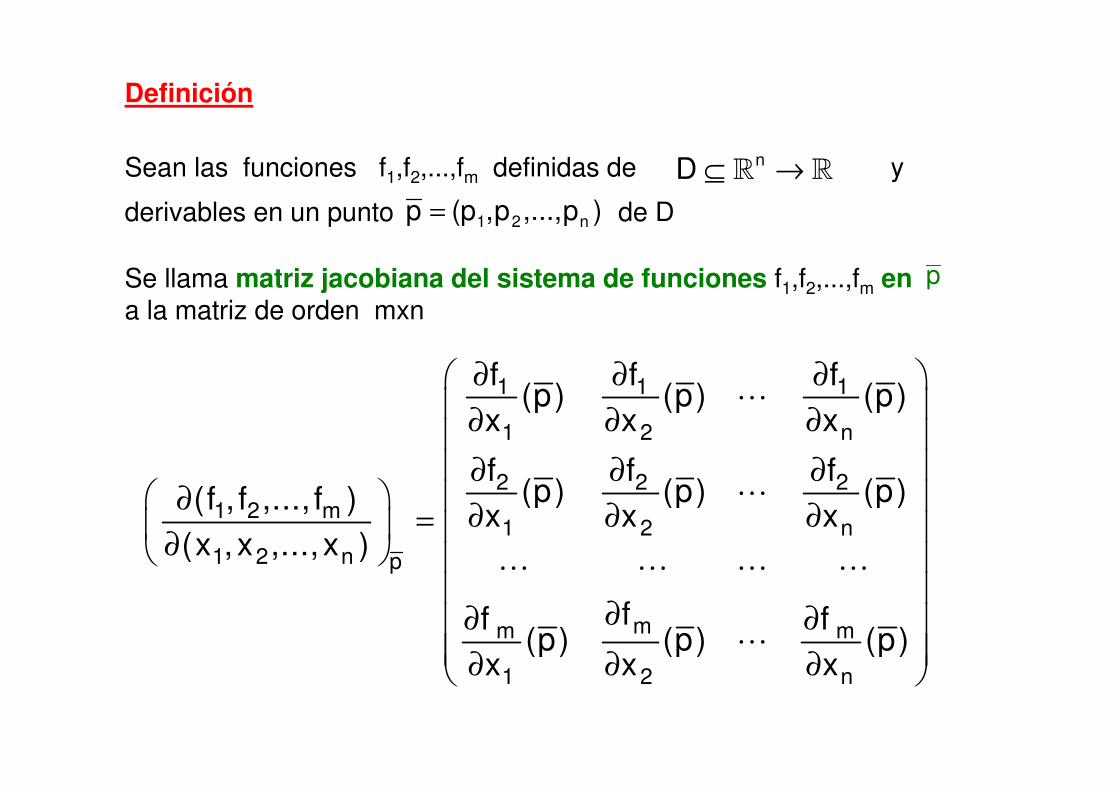
Definición
Sean las funciones f1,f2,...,fm definidas de y
derivables en un punto de D
Se llama matriz jacobiana del sistema de funciones f1,f2,...,fm ena la matriz de orden mxn
)p,...,p,p(p n21=
p
1 1 1
1 2 n
2 2 2
1 2 m1 2 n
1 2 n p
mm m
1 2 n
f f f(p) (p) (p)
x x x
f f f(p) (p) (p)(f , f ,..., f )
x x x(x ,x ,..., x )
ff f(p) (p) (p)
x x x
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
∂∂ ∂ ∂= ∂
∂∂ ∂
∂ ∂ ∂
�
�
� � � �
�
nD ⊆ →� �

Ejemplo: Hallar la matriz jacobiana de las funciones
en el punto (1,2,1)
1 1 2 3 1 2 2 1 2 3 2 3f (x ,x ,x ) x x ; f (x ,x ,x ) x 2x= = −
−=
−=
=
∂
∂
∂
∂
∂
∂∂
∂
∂
∂
∂
∂
=
210
012
)1,2,1(210
0xx
)1,2,1(x
f
x
f
x
fx
f
x
f
x
f
)1,2,1(J
12
3
2
2
2
1
2
3
1
2
1
1
1
f

Ejemplo: Hallar el jacobiano del sistema de funciones {f,g} definidas por:
f(x,y) = x2+y2 , g(x,y) = x(1-y) en el punto (1, -1)
24212
22
xy1
y2x2
y
g
x
gy
f
x
f
)y,x(
)g,f(Det
)1,1(
)1,1(
)1,1(
=+−=−
−=
=−−
=
∂
∂
∂
∂∂
∂
∂
∂
=
∂
∂
−
−
−
En particular, para m=n, la matriz jacobiana es cuadrada y podemos hallar su determinante que se llama jacobiano del sistema de funciones {f1,f2,...,fn} en p

FUNCIONES IMPLÍCITAS
Definición
Se dice que la ecuación F(x,y,z)=0 define la función de dos variables
z=f(x,y) en un dominio si se cumple que
Proposición Derivadas de primer orden
Sea F(x,y,z)=0
Derivando respecto a x
Derivando respecto a y
⊆ 2D Ñ
∂
∂ ∂ ∂ ∂ ∂ ∂∂+ = ⇒ = = − ≠
∂∂ ∂ ∂ ∂ ∂ ∂
∂
F
F F z f z Fx0 si 0
Fx z x x x z
z
= ∀ ∈F(x,y,f(x,y)) 0 (x,y) D
∂
∂ ∂ ∂ ∂ ∂ ∂∂+ = ⇒ = = − ≠
∂∂ ∂ ∂ ∂ ∂ ∂
∂
F
F F z f z Fx0 si 0
Fy z y y y z
z

EXTREMOS DE FUNCIONES DE VARIAS VARIABLES
Sea f :D Œ ÑnöÑ y un punto
perteneciente a D
Definición
f tiene un máximo local en D en el punto , si para todos
los puntos de un entorno de se verifica que
f tiene un mínimo local en D en el punto , si para todos los
puntos de un entorno de se verifica que
Los máximos y mínimos locales se llaman extremos locales.
)p,....,p,(pp n21=
x p
p
)x(f)p(f ≥
p
x p )x(f)p(f ≤

Definición
f tiene un máximo local estricto en D en el punto , si para todos
los puntos de un entorno de tales que se verifica que
f tiene un mínimo local estricto en D en el punto , si para todos
los puntos de un entorno de tales que se verifica que
Los máximos y mínimos locales estrictos se llaman extremos localesestrictos.
x p
p
)x(f)p(f >
p
x p
)x(f)p(f <
px ≠
px ≠

Sea f :D Œ ÑnöÑ y œ D
Definición
f tiene un máximo global o absoluto en D en el punto
si se verifica que
f tiene un mínimo global o absoluto en D en el punto
si se verifica que
Proposición
Si f es continua en un compacto (cerrado y acotado) D
entonces f alcanza un máximo global y un mínimo global en D.
Se pueden alcanzar en más de un punto
)p,....,p,(pp n21=
p
)x(f)p(f ≥
p
)x(f)p(f ≤
x D∀ ∈
x D∀ ∈

Proposición
Sea f una función derivable en un punto
Si es un extremo local de f entonces,
Es decir, para que haya un máximo o un mínimo local en un
punto es necesario que en ese punto se anulen todas
las derivadas parciales
Esta condición no es suficiente
p
p
p 0)p(f =∇
1 2 n
f f f(p) 0 (p) 0 (p) 0
x x x
∂ ∂ ∂= = =
∂ ∂ ∂…

Definición
Sea f una función derivable en D
Se llaman puntos críticos o estacionarios de f en D los puntos que verifican la condición
Definición
Se llama punto de silla a un punto crítico de f que no es
un máximo ni un mínimo local de f
p 0)p(f =∇

Definición Sea f de clase C2 en un entorno de un punto interior
La matriz :
de orden nxn se llama matriz hessiana de f en p
2 2 2
21 2 1 n1
2 2 2
2p 2 1 2 n2
2 2 2
2n 1 n 2 n
f f f(p) (p) (p)
x x x xx
f f f(p) (p) (p)
H(f ) x x x xx
f f f(p) (p) (p)
x x x x x
∂ ∂ ∂
∂ ∂ ∂ ∂∂
∂ ∂ ∂ = ∂ ∂ ∂ ∂∂
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
�
�
� � � �
�
p D∈
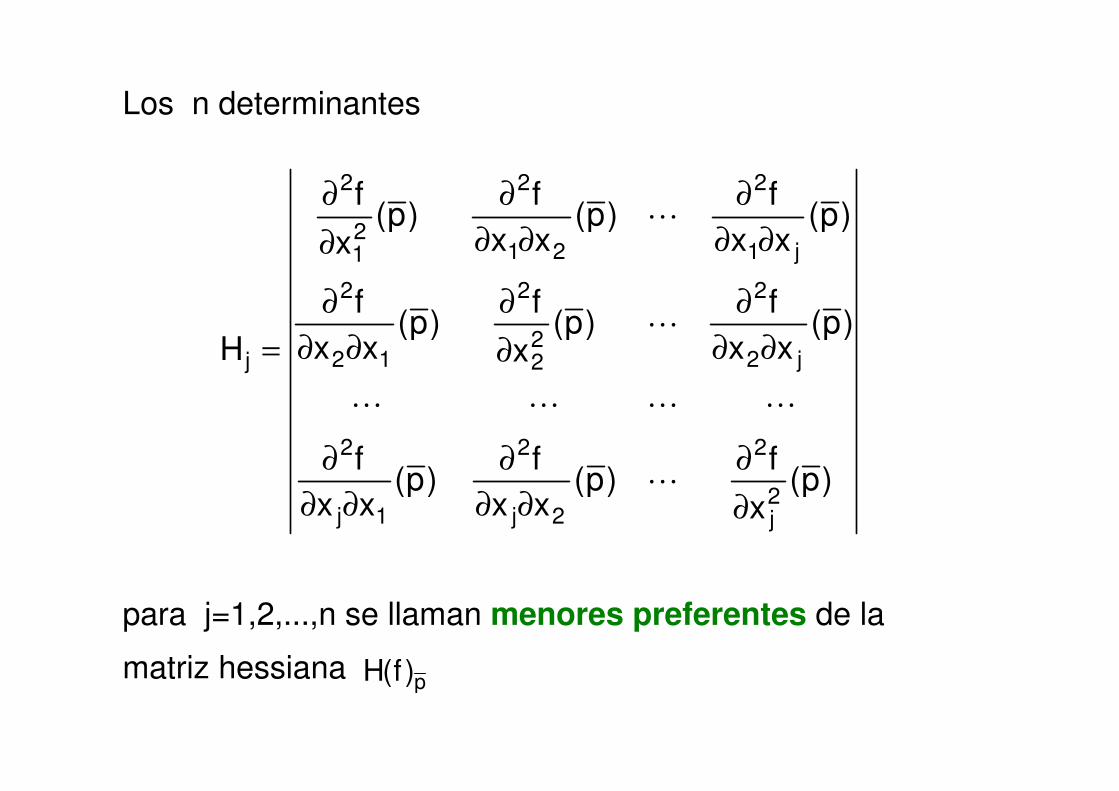
Los n determinantes
para j=1,2,...,n se llaman menores preferentes de la
matriz hessianapH(f)
2 2 2
21 2 1 j1
2 2 2
22 1 2 jj 2
2 2 2
2j 1 j 2 j
f f f(p) (p) (p)
x x x xx
f f f(p) (p) (p)
x x x xH x
f f f(p) (p) (p)
x x x x x
∂ ∂ ∂
∂ ∂ ∂ ∂∂
∂ ∂ ∂
∂ ∂ ∂ ∂= ∂
∂ ∂ ∂
∂ ∂ ∂ ∂ ∂
�
�
� � � �
�

Proposición Sea f de clase C2 en un entorno de un punto crítico
1º) Si para j =1,2,...,n, se cumple que Hj < 0 si j es impar y Hj>0 si j es par, entonces es un máximo local
2º) Si Hj > 0 para j =1,2,...,n, entonces es un mínimo local
3º) Si Hn ≠ 0 y no se cumple ninguno de los dos apartados anteriores, entonces es un punto de silla
Para n=2
1º) H1 < 0 y H2 > 0 ï Máximo local
2º) H1 > 0 y H2 > 0 ï Mínimo local
3º) H2 < 0 ï Punto de silla
p
p
p
p

EXTREMOS DE FUNCIONES DE VARIAS VARIABLES CONDICIONADOS
Sea f :D Œ ÑnöÑ , las m funciones f1,f2,...,fm ( m < n ) definidas en D
y un punto solución del sistema:
Definición f tiene un máximo local condicionado por el sistema de ecuaciones (1)en el punto si para todos los puntos de un entorno de se
verifica que
f tiene un mínimo local condicionado por el sistema de ecuaciones (1)en el punto si para todos los puntos de un entorno de se
verifica que
)p,....,p,(pp n21=
xp
p
)x(f)p(f ≥
p x
p
)x(f)p(f ≤
1 1 2 n
2 1 2 n
m 1 2 n
f (x ,x , , x ) 0
f (x ,x , ,x ) 0(1)
f (x ,x , , x ) 0
=
= =
…
…
��������
… ligaduras

Formamos la función auxiliar
y la matriz:1 1 1
1 2 n
2 2 2
1 2 n
m m m
1 2 n
f f f
x x x
f f f
x x xA
f f f
x x x
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
∂ ∂ ∂=
∂ ∂ ∂ ∂ ∂ ∂
�
�
� � � �
�
Los coeficientes l1, l2,...,lm son parámetros que hay que hallar y se llaman multiplicadores de Lagrange
1 1 2 2 m mh(x) f(x) f (x) f (x) f (x) x D= + λ + λ + + λ ∀ ∈�

Proposición
Supongamos que las funciones f,f1,f2,...,fm son de clase C1
en un conjunto abierto D ⊆ Ñn y consideremos un puntode S tal que la matriz A evaluada en el punto sea de rango fila completo (es decir, rango(A)=m). Entonces, si es un extremo local de f, condicionado
por el sistema de ecuaciones (1), resulta que existen λ1, λ2,..., λm∈ Ñ únicos tales que la función auxiliar h tiene en un punto crítico.
pp
p
p
Es decir, para hallar los extremos condicionados de f tenemos que hallar los multiplicadores de Lagrange y los puntos críticos de la función auxiliar h teniendo también en cuenta las ligaduras
¿ Son máximos o mínimos?

1 1 1
1 2 n
2 2 2
1 2 n
m m m
1 2 n
2 2 21 2 m
21 1 1 1 2 1 n1
2 2 21 2 m
22 2 2 2 1 2
f f f0 0 0
x x x
f f f0 0 0
x x x
f f f0 0 0
x x x
Bf f f h h h
x x x x x x xx
f f f h h h
x x x x x x
... ...
... ...
... ... ... ... ... ... ... ...
... ...
... ...
... ...
∂ ∂ ∂
∂ ∂ ∂
∂ ∂ ∂
∂ ∂ ∂
∂ ∂ ∂
∂ ∂ ∂=
∂ ∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂ ∂∂
∂ ∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂∂ 2 n
2 2 21 2 m
2n n n n 1 n 2 n
x x
f f f h h h
x x x x x x x x
... ... ... ... ... ... ... ...
... ...
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
Definición Si f, f1,f2,...,fm son de clase C2 en D, la matriz:
se llama matriz hessiana orlada
A
ATH
Proposición Consideremos la matriz hessiana orlada B evaluada en un
punto crítico de la función auxiliar h con los
multiplicadores de Lagrange obtenidos anteriormente
p
1º) Si los últimos n-m menores preferentes de la matriz B tienen como signo (-1)m, resulta que la función f tiene un mínimo local en el punto condicionado por el sistema de ecuaciones (1).
2º) Si los últimos n-m menores preferentes de la matriz B alternan su signo comenzando por el signo (-1)m+1, resulta que la función f tiene un máximo local en el punto condicionado por el sistema de ecuaciones (1).
p
p

Para n=2Proposición f: Ñ2ö Ñ y hay una única ligadura dada por la ecuación
f1(x,y)=0, la función auxiliar es h = f+λf1 y la matriz hessiana orlada queda:
1 1
1 2
2 21
21 1 21
2 21
22 2 1 2
f f0
x x
f h hB
x x xx
f h h
x x x x
∂ ∂
∂ ∂
∂ ∂ ∂ = ∂ ∂ ∂∂
∂ ∂ ∂ ∂ ∂ ∂ ∂
Evaluamos B en un punto crítico. Entonces:1º) Si |B|<0 la función f tiene un mínimo local condicionadoen ese punto2º) Si |B|>0 la función f tiene un máximo local condicionadoen ese punto





























