Embed Size (px)
DESCRIPTION
Control
Citation preview
“Whenever you feel like criticizing any one –he told
me,- just remember that all the people in the world
haven’t had the advantages that you’ve had”
The Great Gatsby
F.S.Fitzgerald
Fundamentos Elementos
de Control
Nicanor Quijano, PhD
Profesor Asociado
Depto de Ingeniería Eléctrica y Electrónica
Facultad de Ingeniería
Director GIAP
Lineamientos del Curso
MODELAMIENTO DE
SISTEMAS LINEALES E
INVARIANTES EN EL TIEMPO
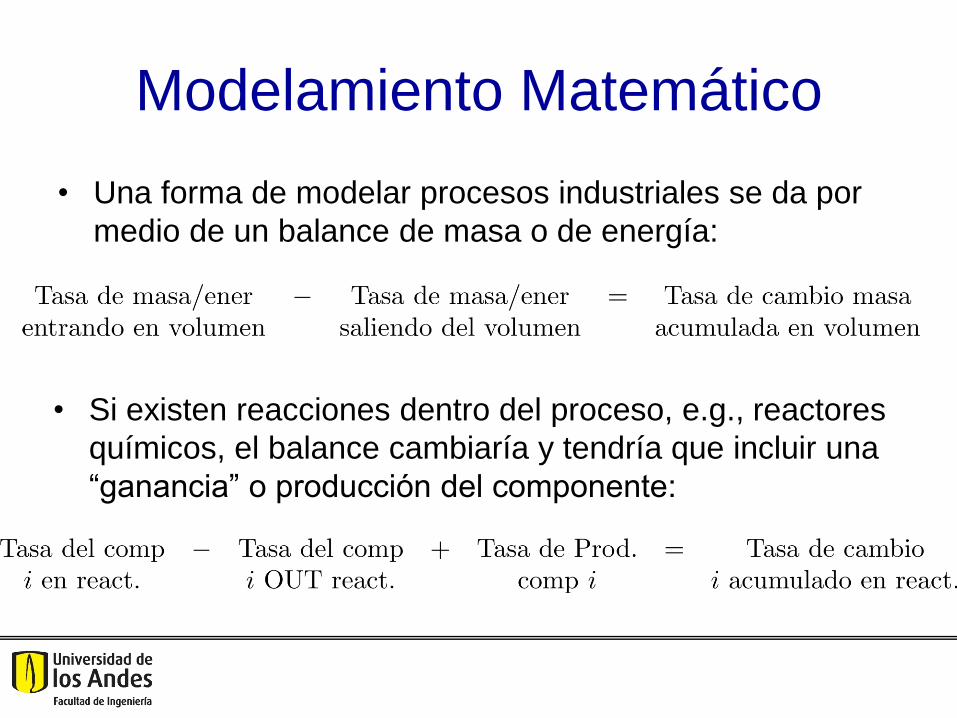
Modelamiento Matemático
• Una forma de modelar procesos industriales se da por
medio de un balance de masa o de energía:
• Si existen reacciones dentro del proceso, e.g., reactores
químicos, el balance cambiaría y tendría que incluir una
“ganancia” o producción del componente:
• Para otro tipo de sistemas, se recurre al
modelamiento físico del mismo.
• En muchos casos se hacen analogías
(e.g., sistemas eléctricos).
• El sistema estará descrito por una primera
abstracción en términos de ODEs.
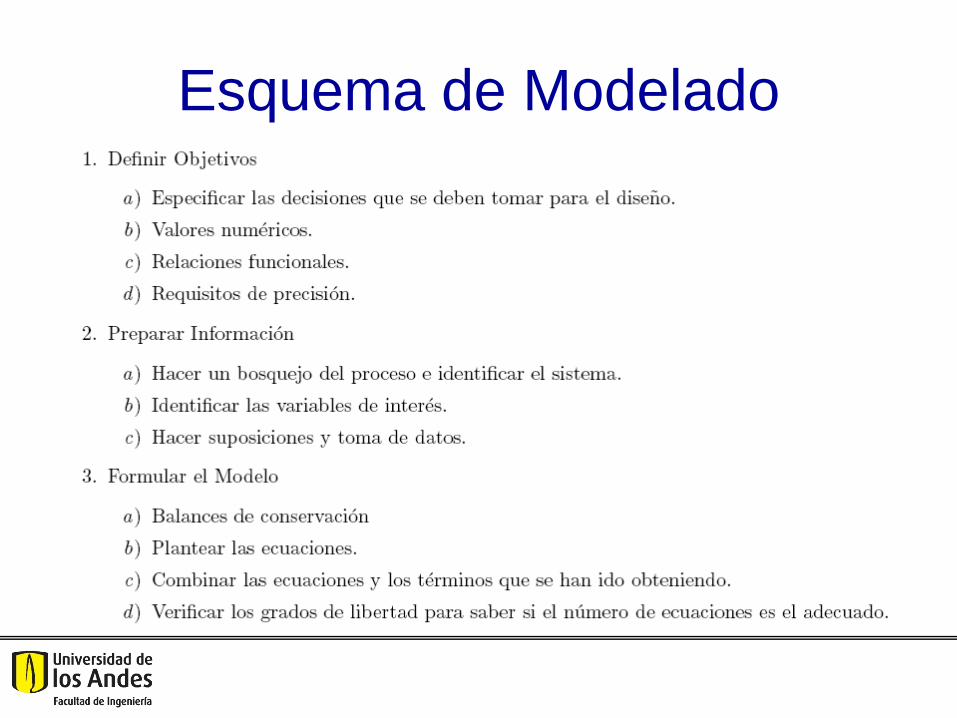
Esquema de Modelado
Esquema de Modelado
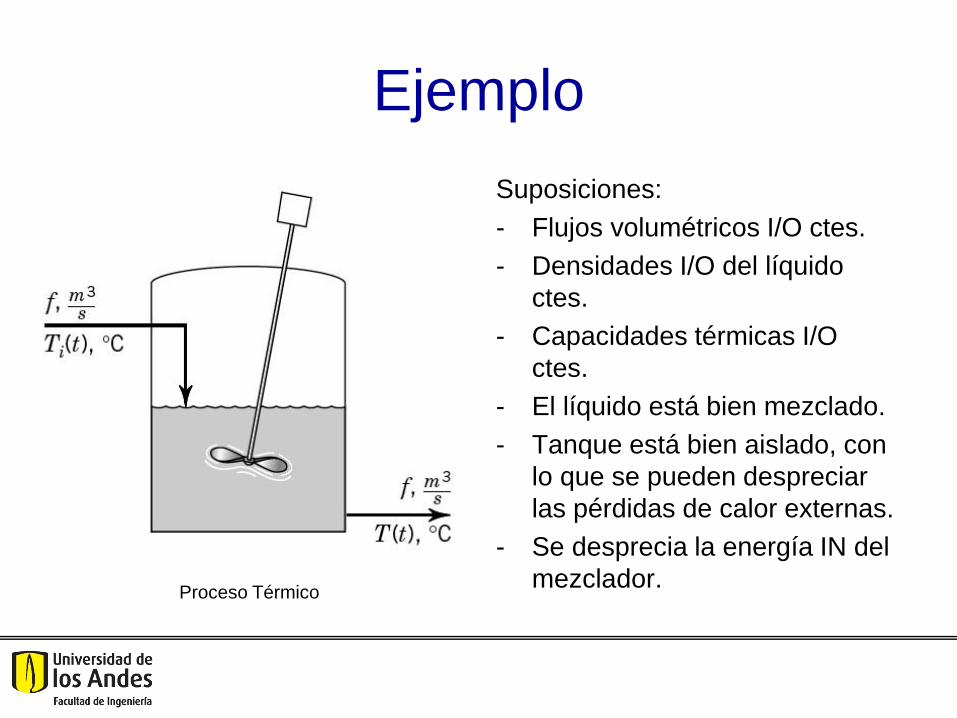
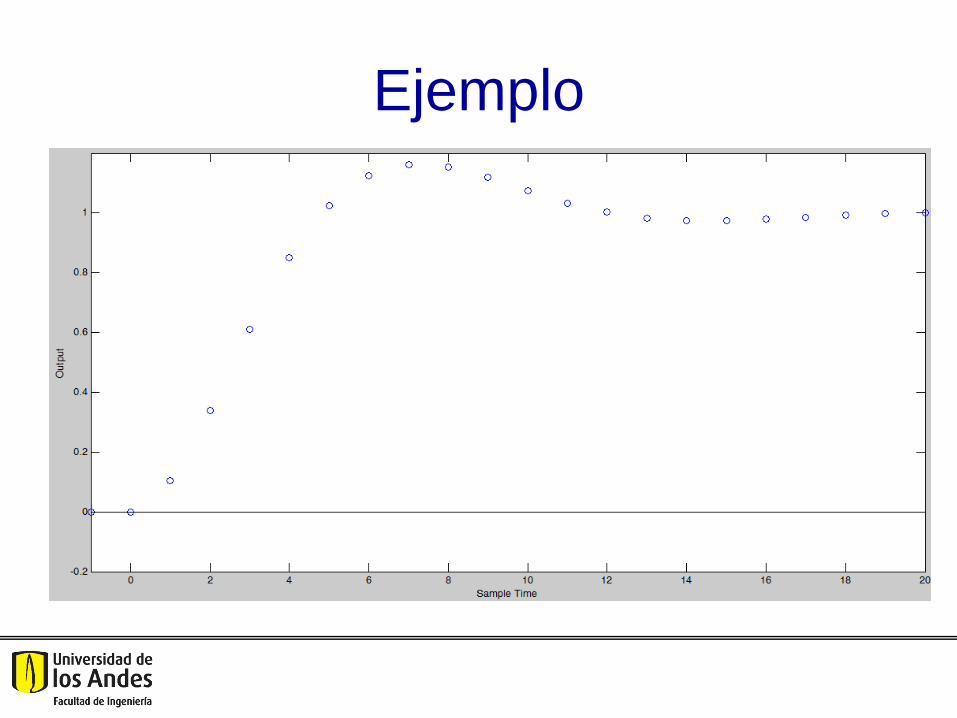
Ejemplo
Suposiciones:
- Flujos volumétricos I/O ctes.
- Densidades I/O del líquido
ctes.
- Capacidades térmicas I/O
ctes.
- El líquido está bien mezclado.
- Tanque está bien aislado, con
lo que se pueden despreciar
las pérdidas de calor externas.
- Se desprecia la energía IN del
mezclador. Proceso Térmico
Objetivo
Desarrollar un modelo matemático y una
función de transferencia que describa
cómo la temperatura de salida T(t)
responde a un cambio de temperatura de
entrada Ti(t).
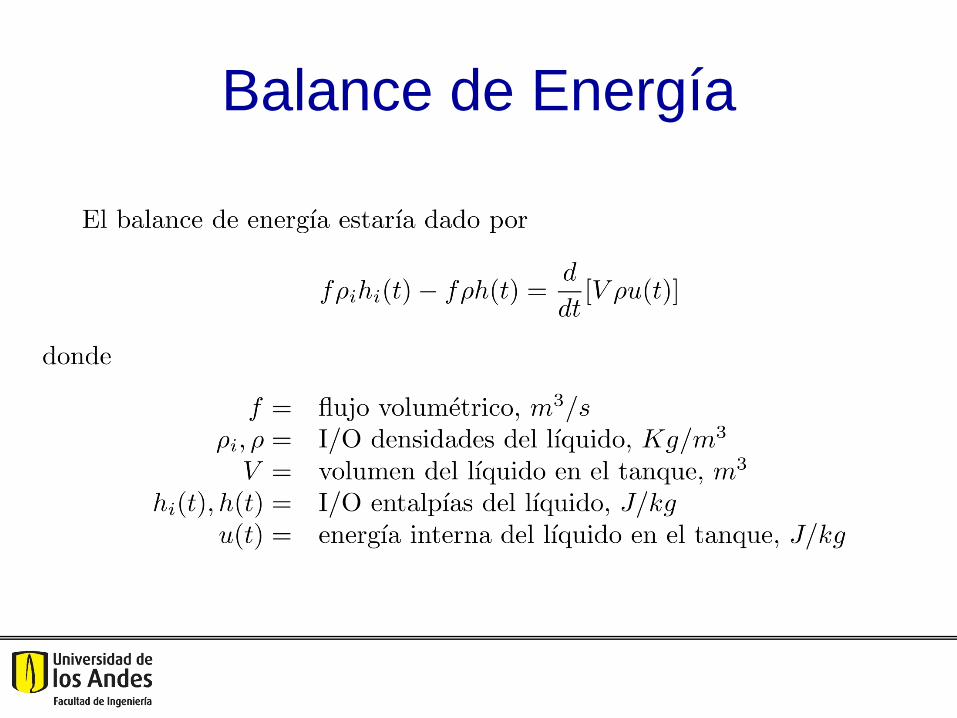
Balance de Energía
Cómo se puede pasar de una ODE a otra representación??
Qué es una función de transferencia??
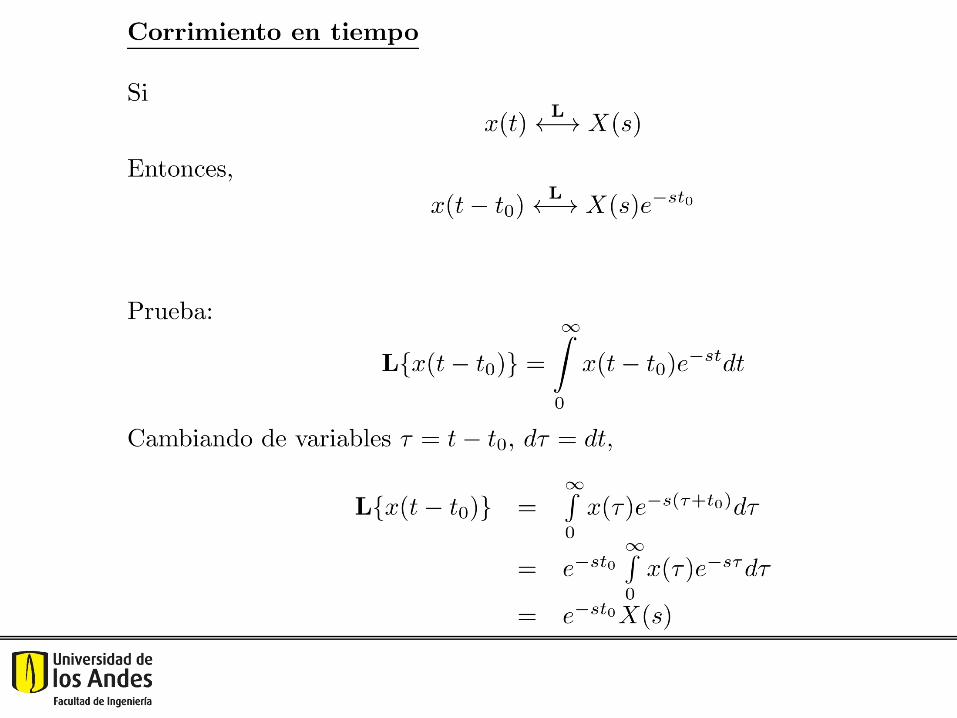
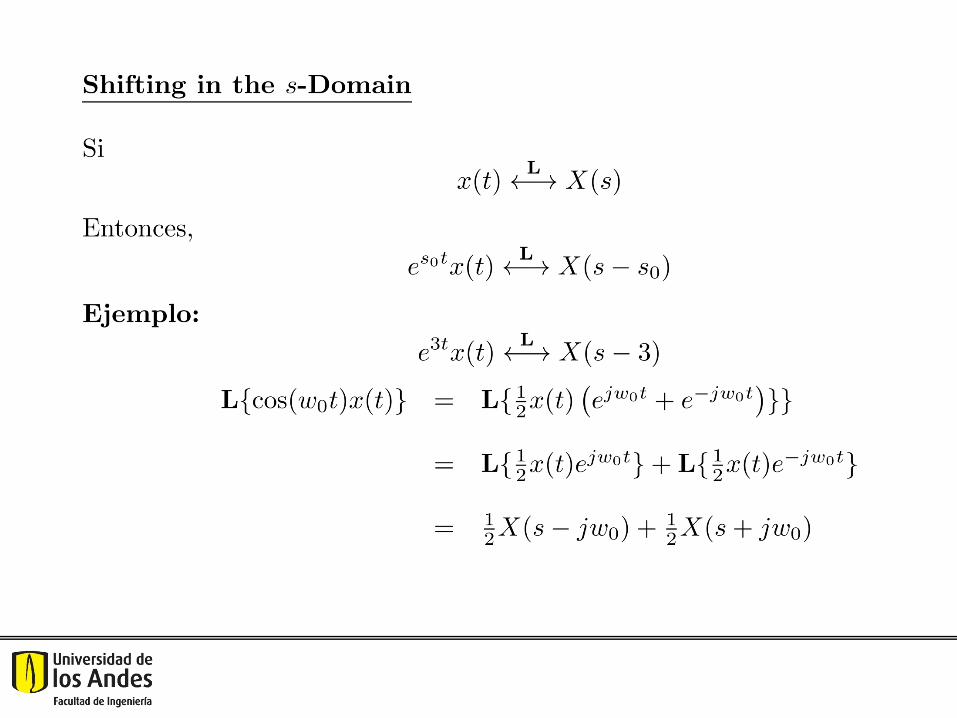
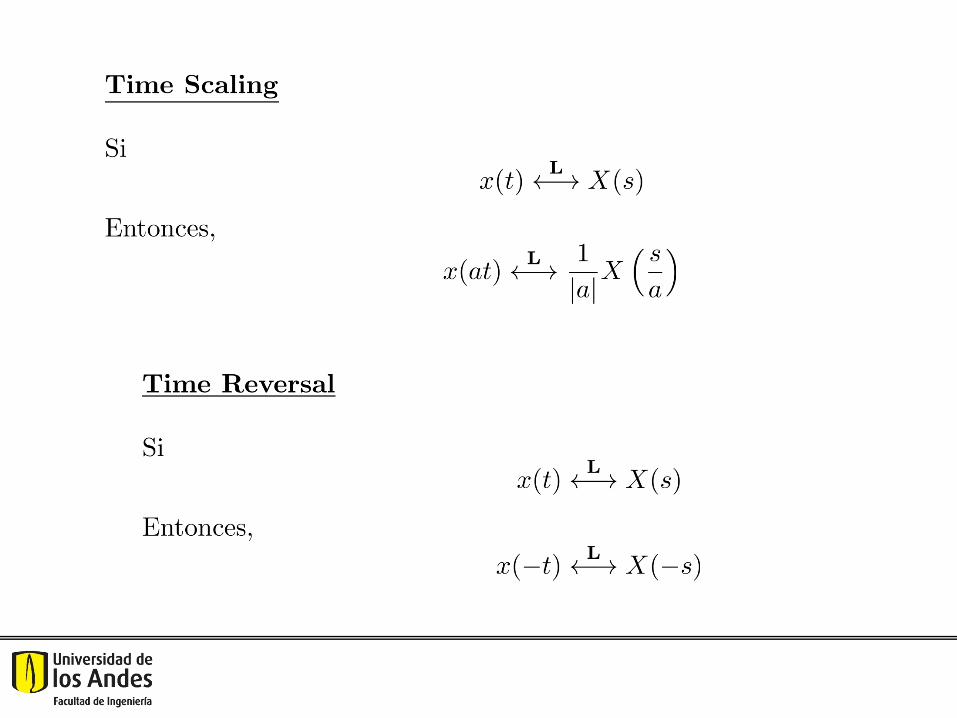
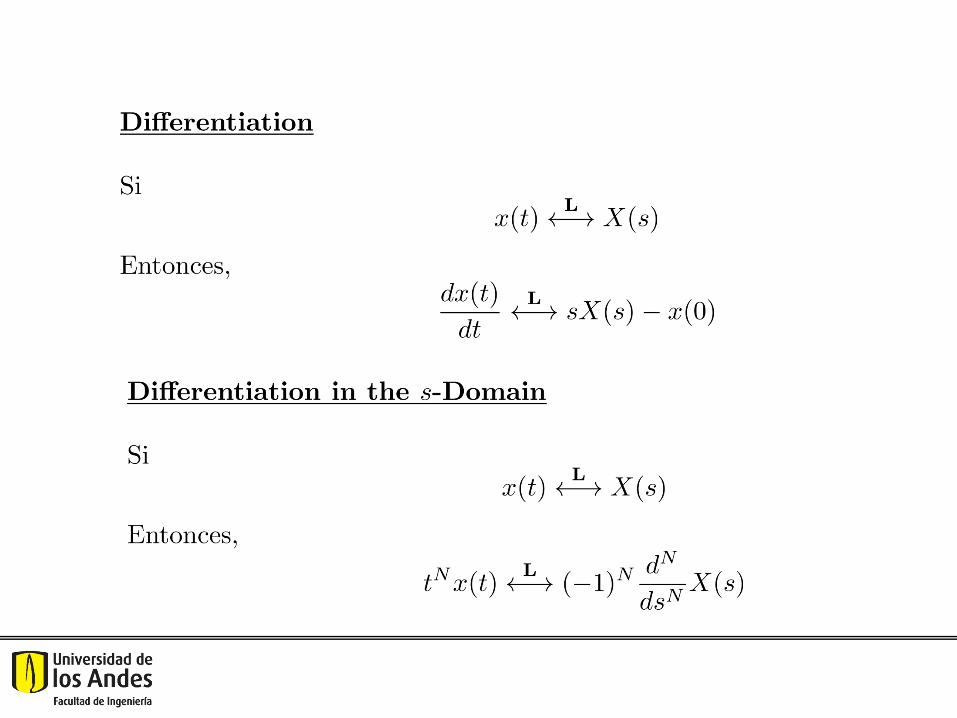
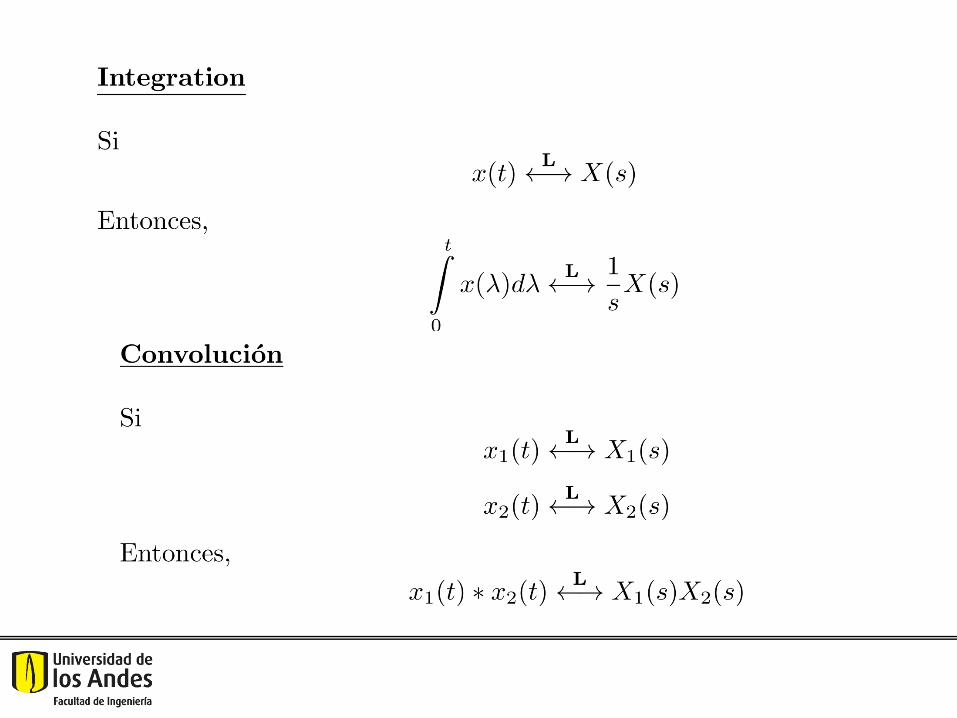
Laplace
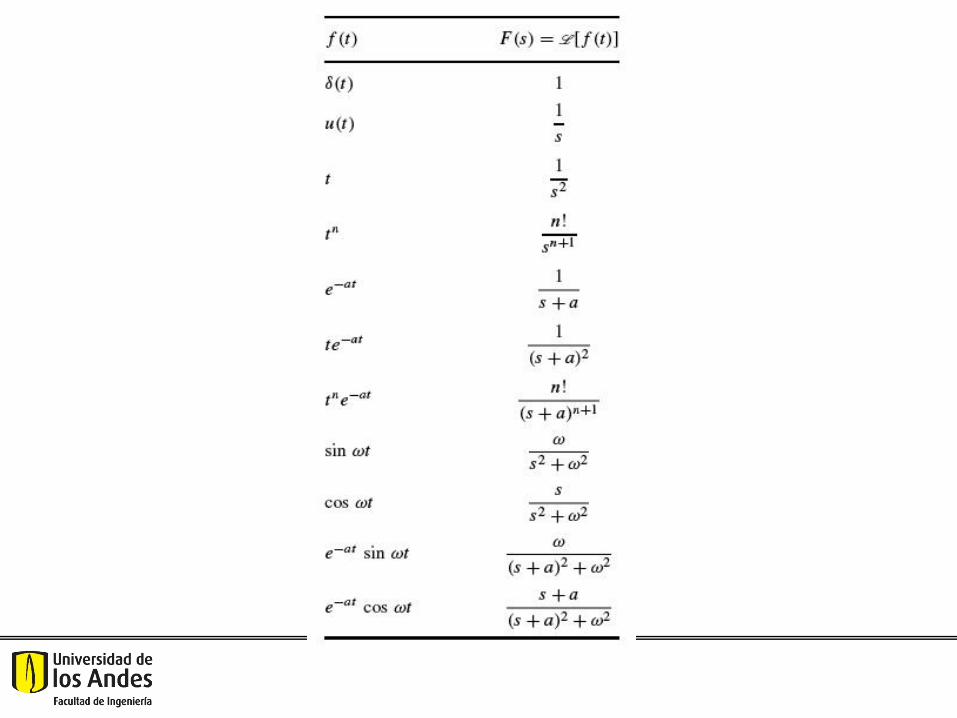
Transformada de Laplace
Propiedades
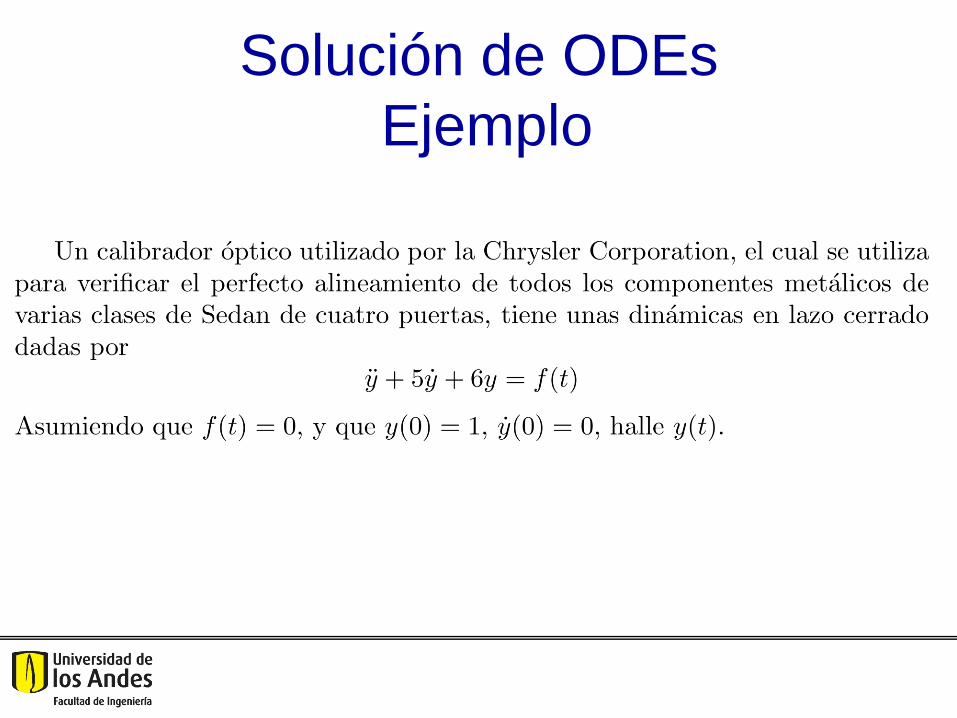
Solución de ODEs
Ejemplo
Solución
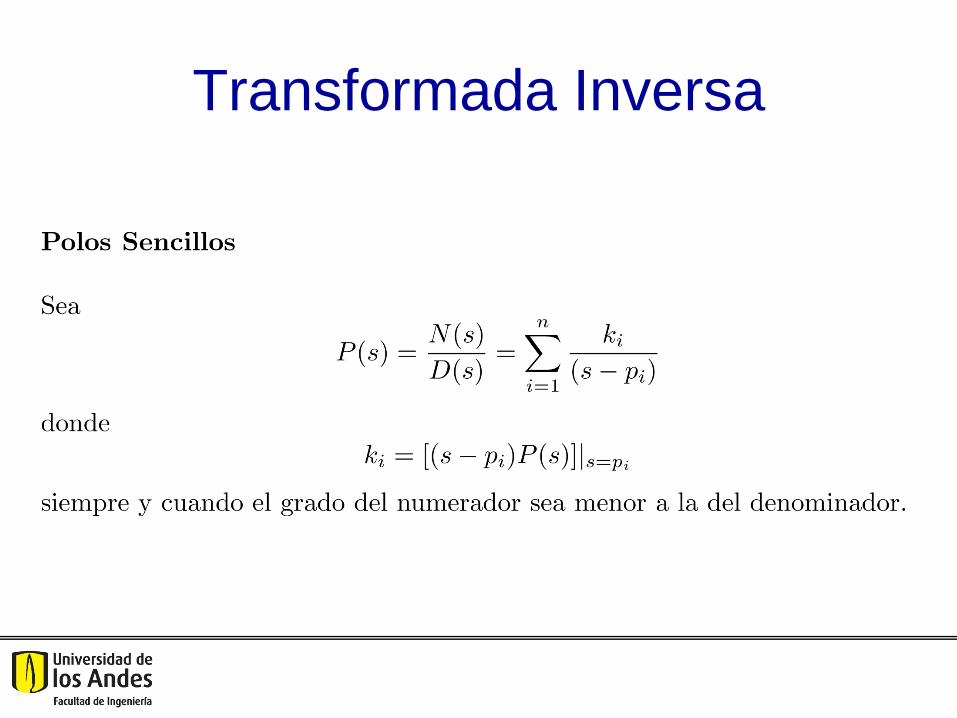
Transformada Inversa
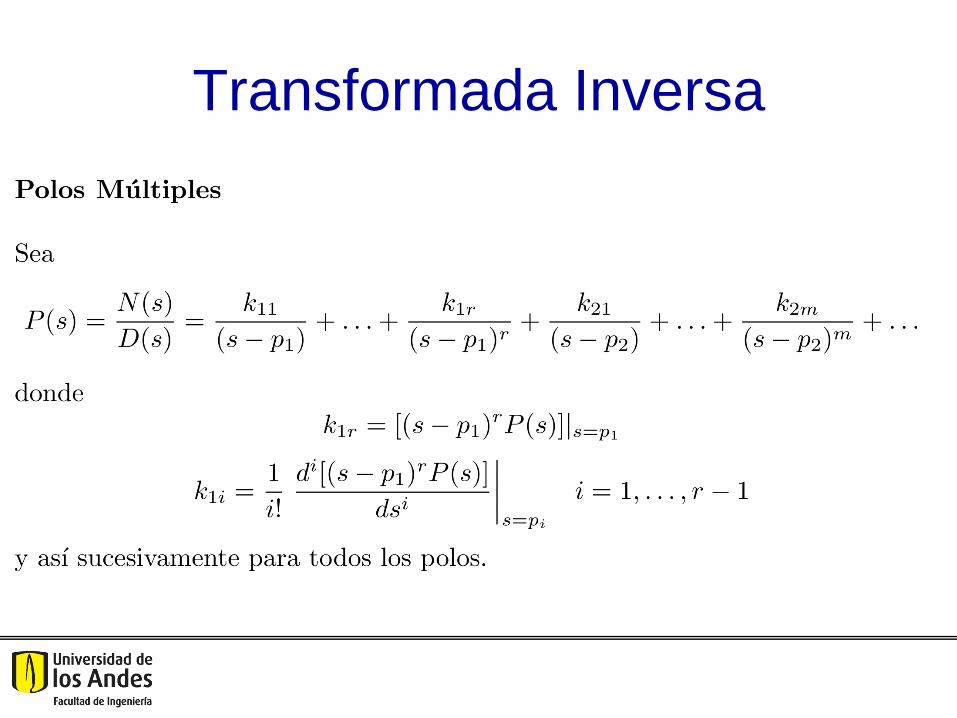
Transformada Inversa
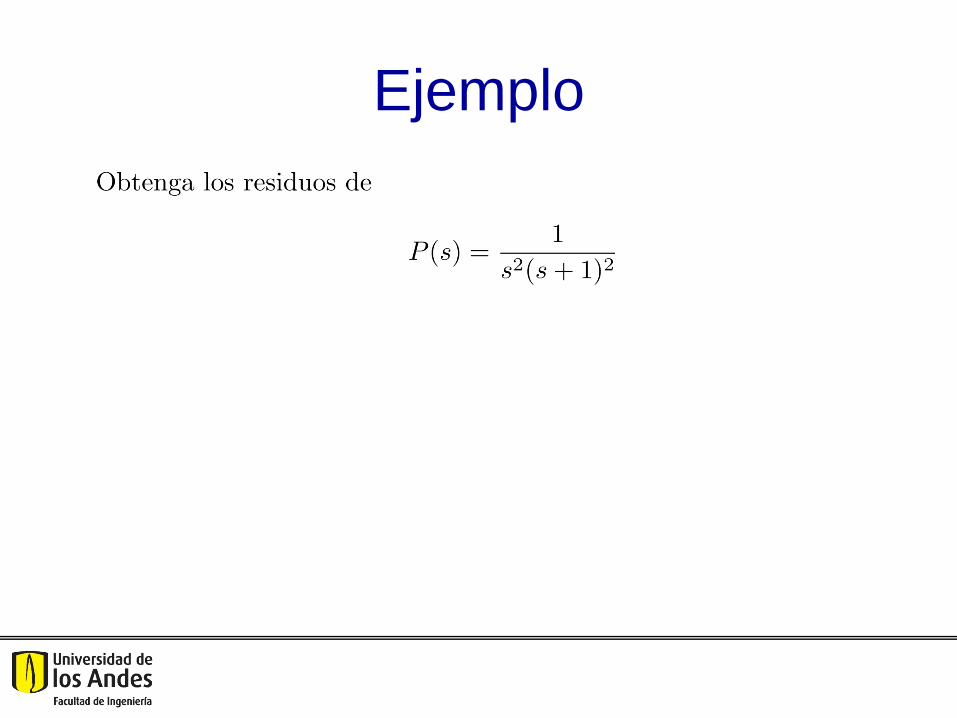
Ejemplo
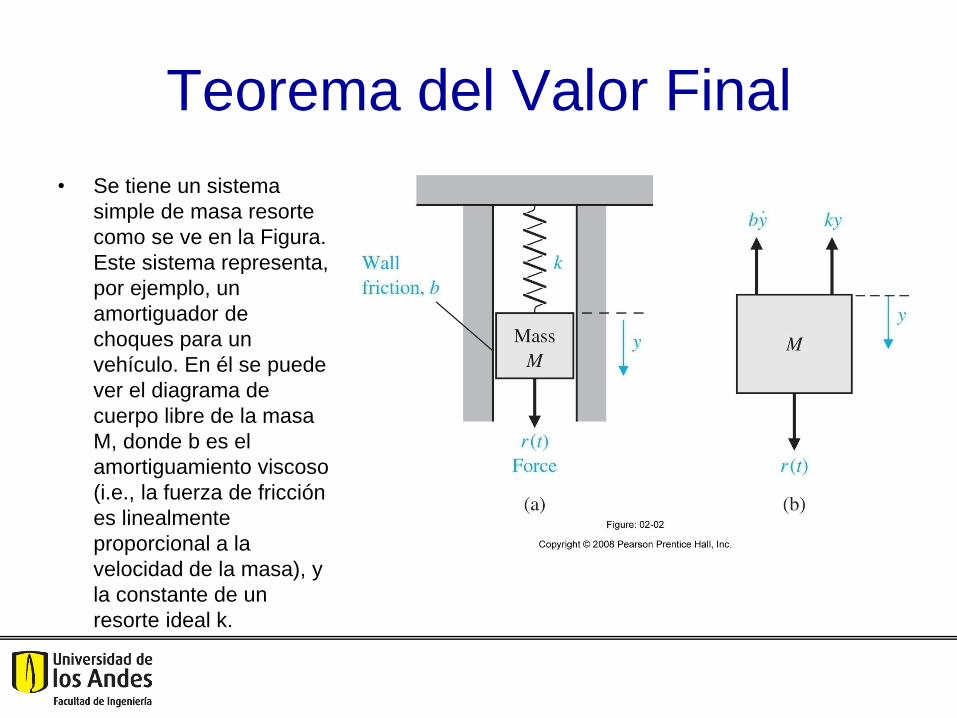
Teorema del Valor Final
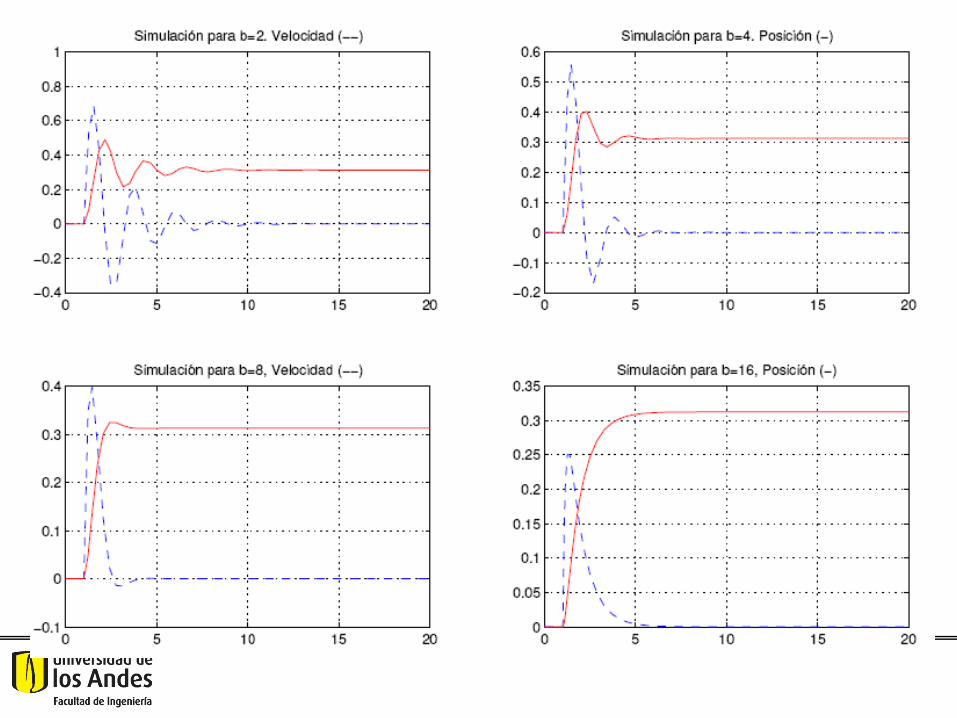
• Se tiene un sistema
simple de masa resorte
como se ve en la Figura.
Este sistema representa,
por ejemplo, un
amortiguador de
choques para un
vehículo. En él se puede
ver el diagrama de
cuerpo libre de la masa
M, donde b es el
amortiguamiento viscoso
(i.e., la fuerza de fricción
es linealmente
proporcional a la
velocidad de la masa), y
la constante de un
resorte ideal k.

Solución
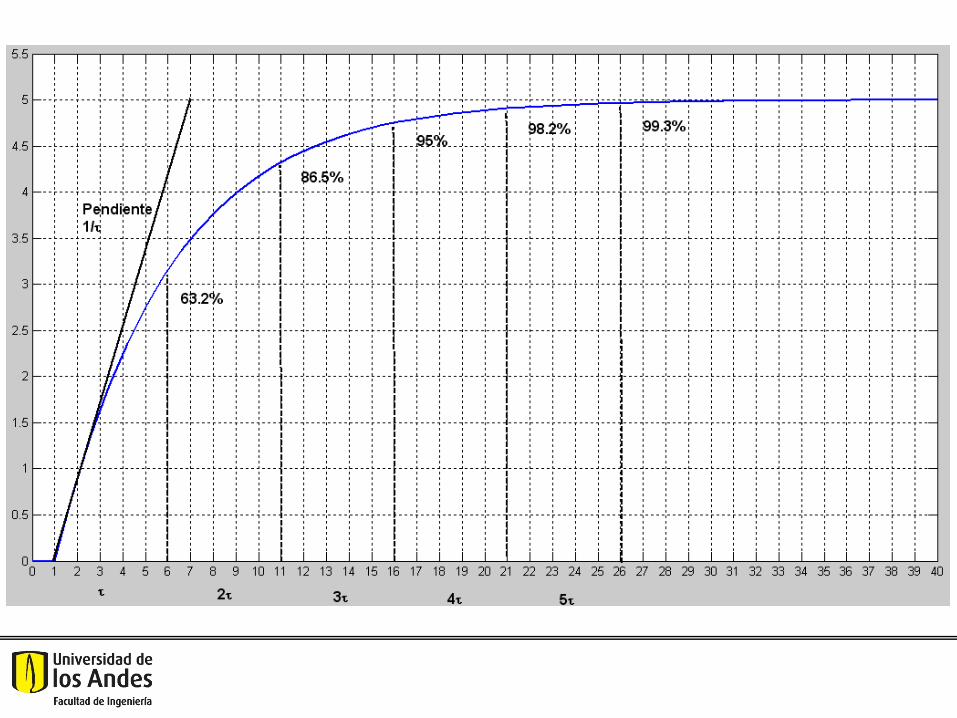
Teorema del Valor Final
Ejemplo
Función de Transferencia
Recordando el ejemplo anterior…
Resumiendo…
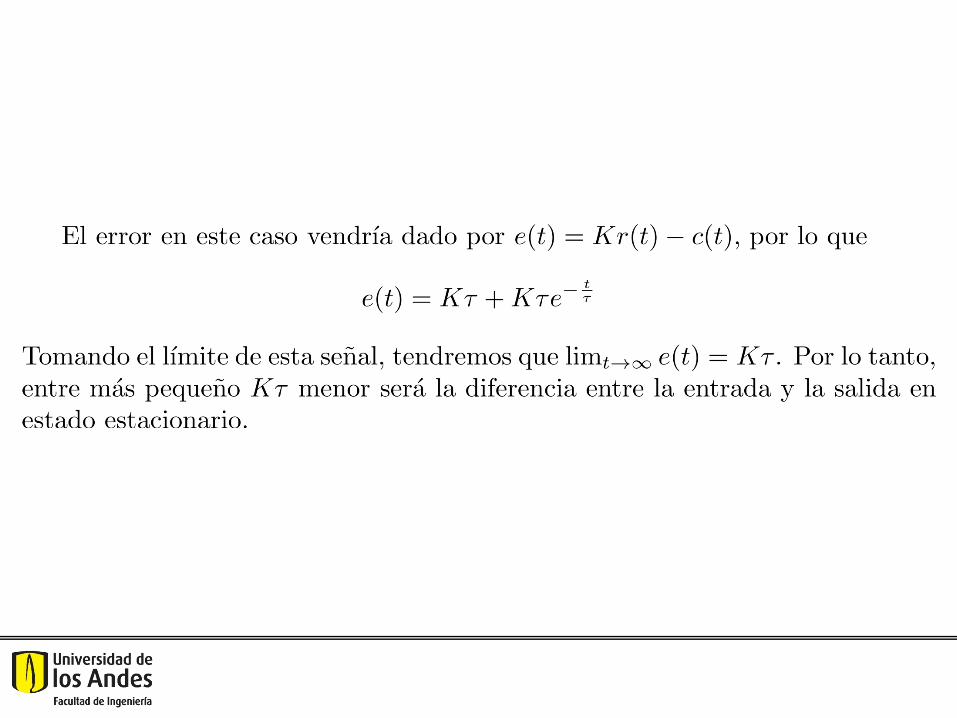
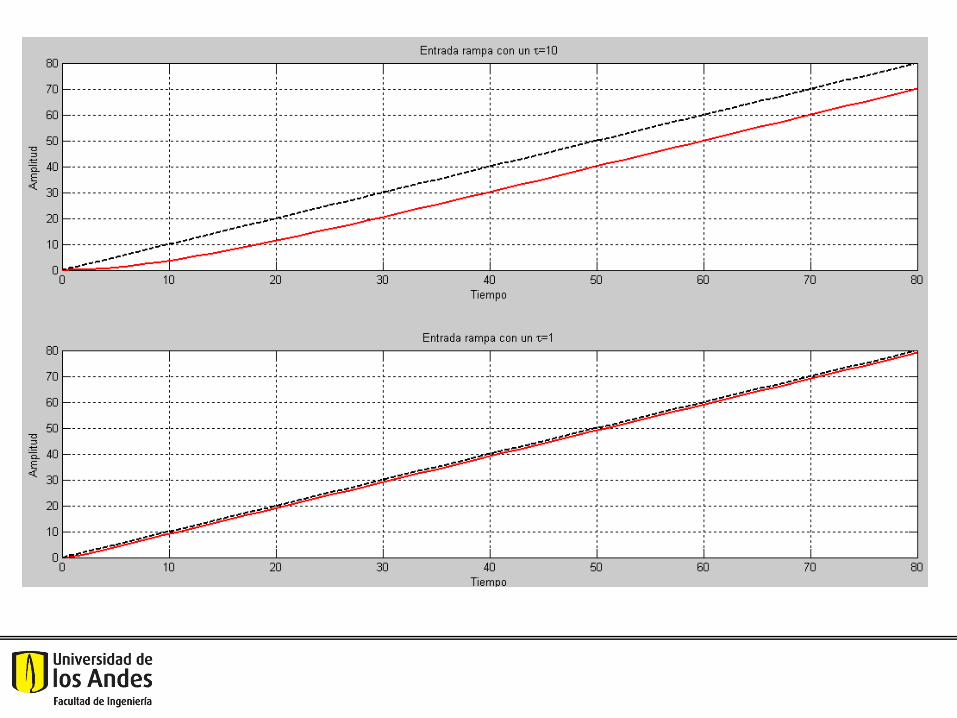
Qué pasaría si la entrada fuera
una rampa?
• Cómo sería C(s) para un sistema de primer orden y una
entrada rampa??
Qué pasaría si el sistema es no lineal??
• No se puede utilizar la transformada de
Laplace.
• El análisis cambia, y por lo general en
dichos casos lo que se busca es más un
análisis cualitativo que cuantitativo.
• Habría alguna solución utilizando la teoría
que conocemos??
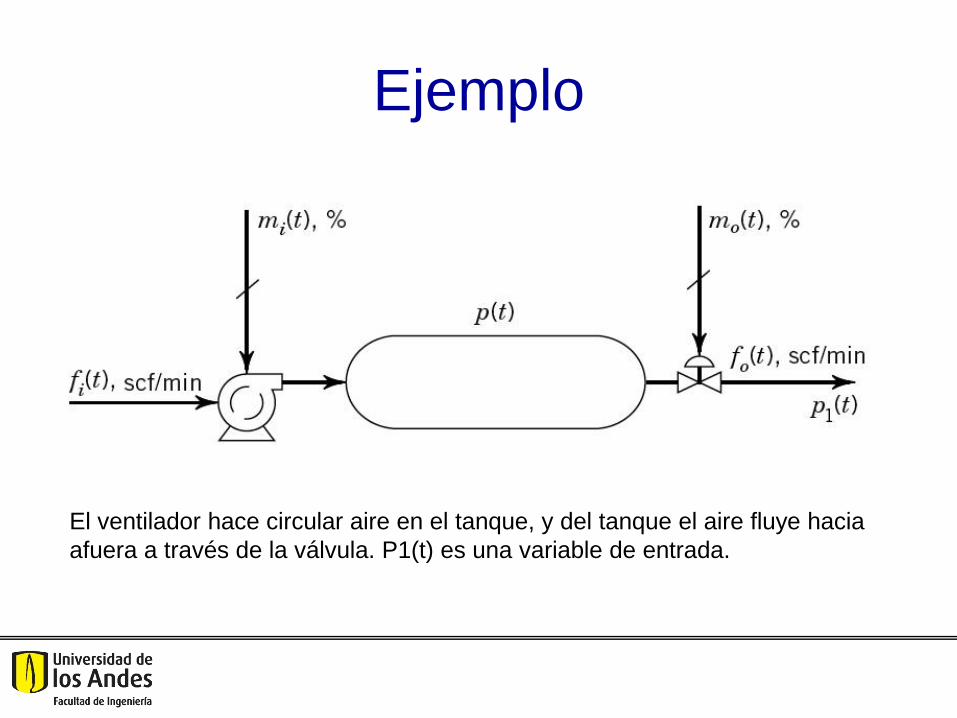
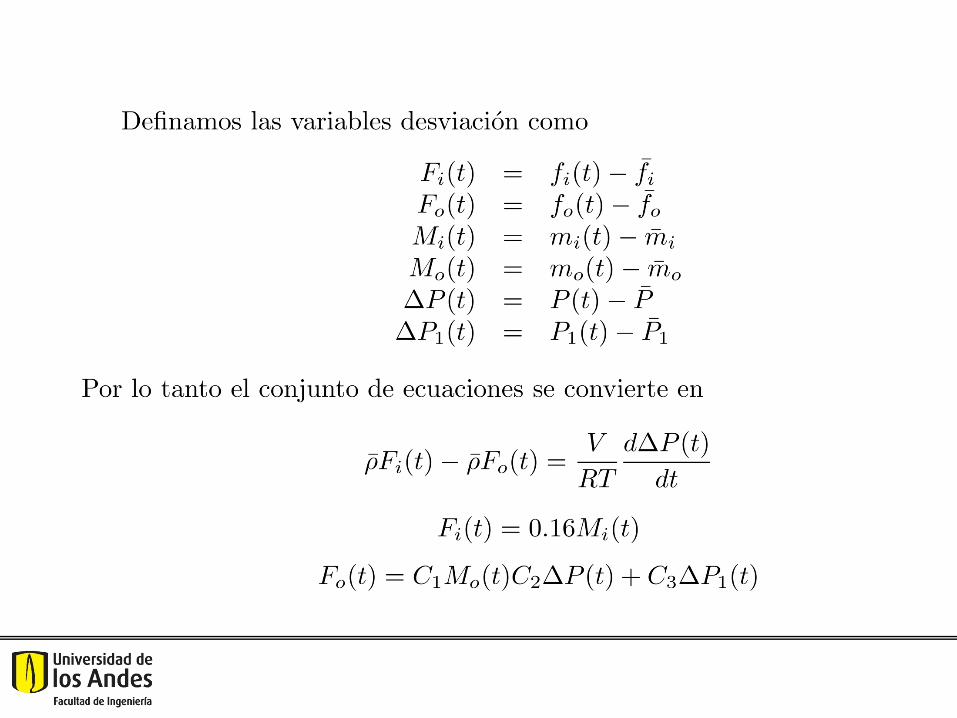
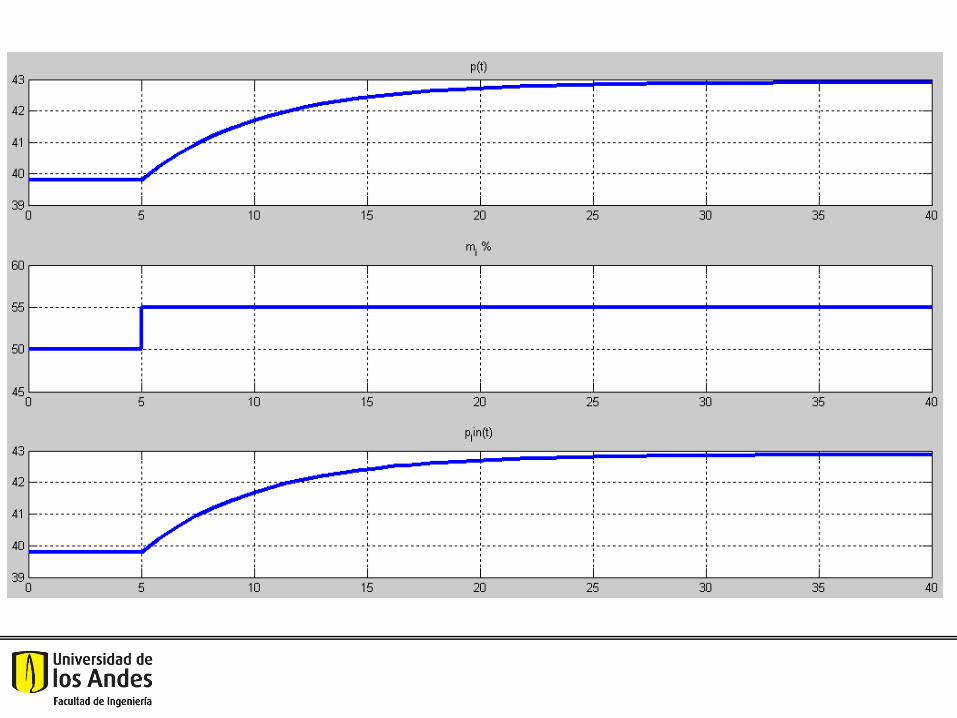
Ejemplo
El ventilador hace circular aire en el tanque, y del tanque el aire fluye hacia
afuera a través de la válvula. P1(t) es una variable de entrada.
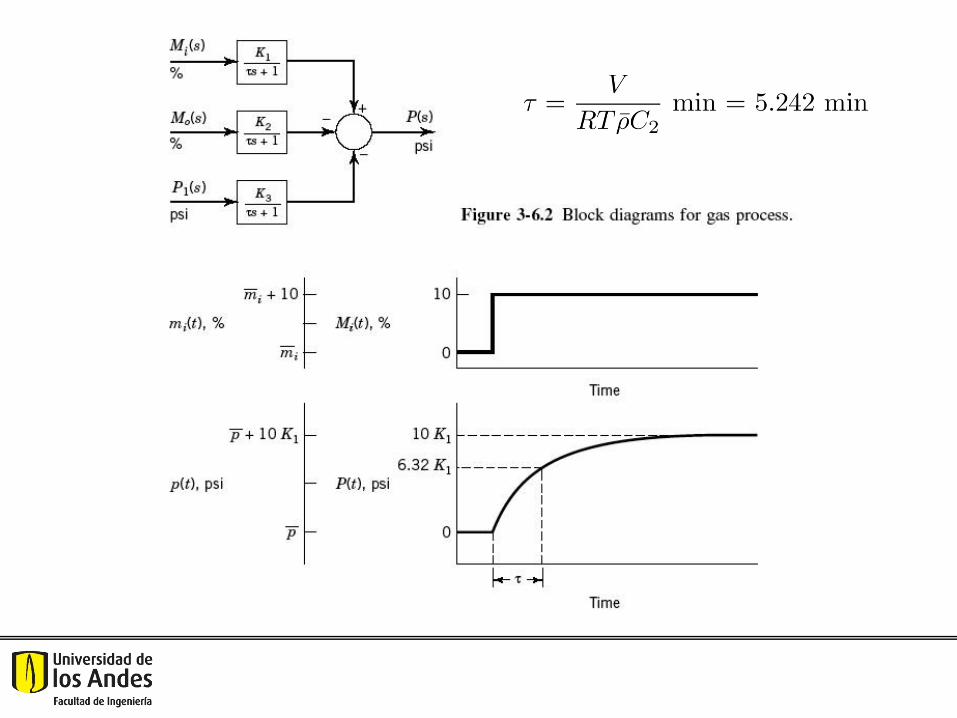
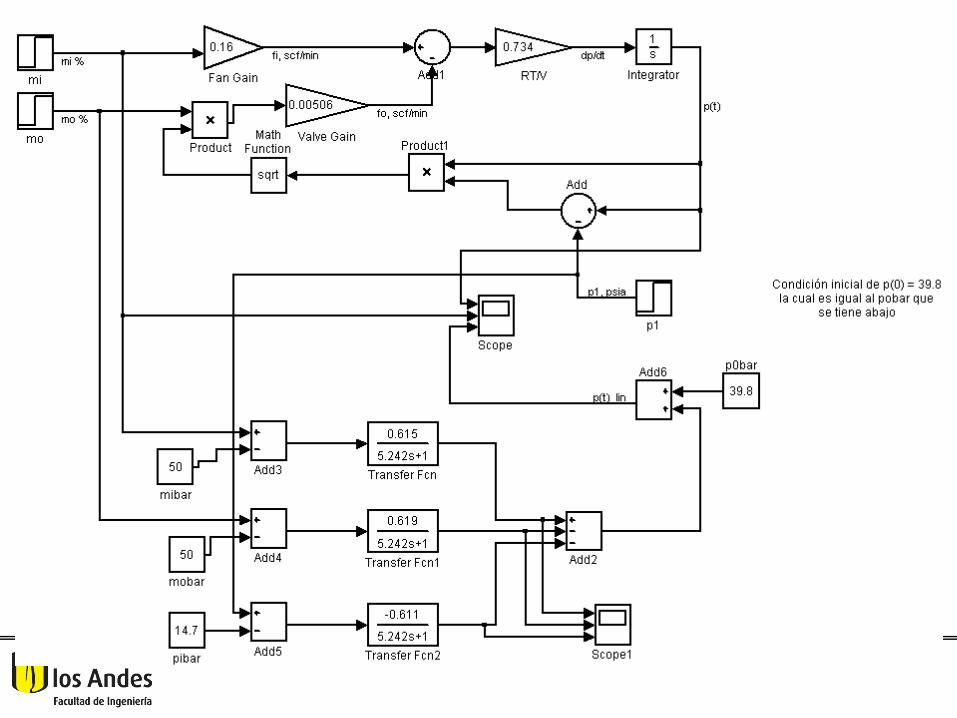
Objetivo
Obtener un modelo matemático, funciones
de transferencia, y diagrama en bloques
que relacionen la presión en el tanque con
los cambios en la señal del ventilador,
mi(t), de la válvula mo(t), y de la presión
de salida P1(t).
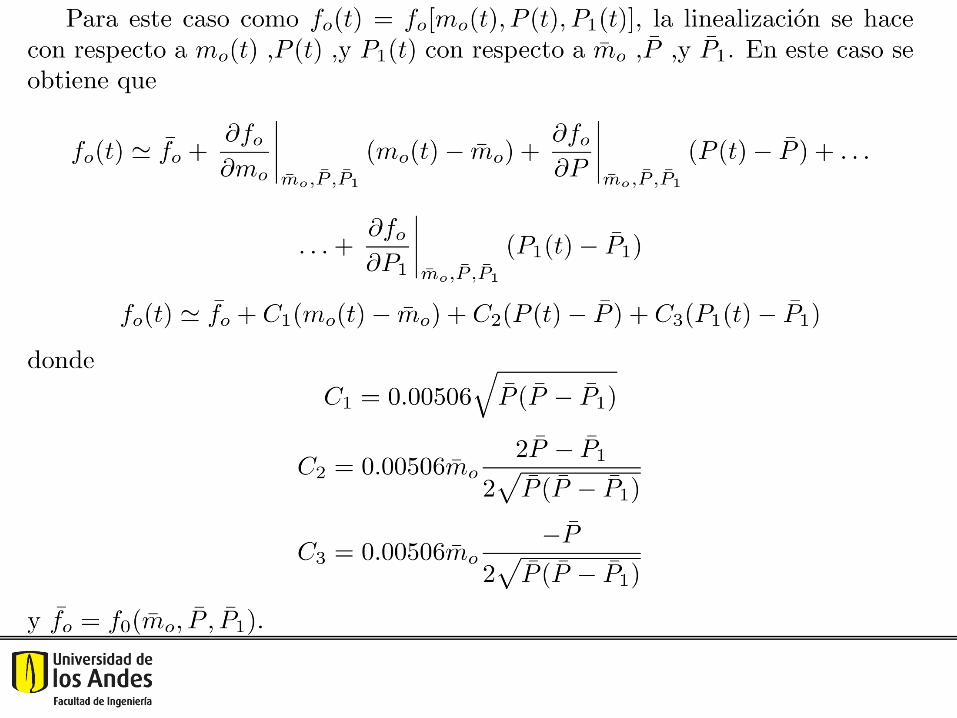
Cómo Analizar sin Transformar?
• Utilizar representaciones de estado.
• Esta emerge de tomar el sistema no lineal
y aproximarlo por medio de una serie de
Taylor tomando como puntos de
operación los valores de estado
estacionario.
Motivación
• La representación en espacio de estado es la más
natural para físicos y matemáticos.
• Este tipo de representación apareció en los Estados
Unidos a finales de los 50s gracias al aporte de Solomon
Lefschetz (creador del grupo Research Institute of
Advaced Studies (RIAS) en Baltimore, MD).
• Otro grupo que comenzó a trabajar fuertemente
alrededor de este tipo de ideas fue el de Columbia
University bajo la égida de J.R.Ragazzini, y en el que se
encontraban R.E.Kalman y J.E.Bertram entre otros.
• 1st IFAC (International Federation of Automatic Control)
Congress fue realizado en Moscú.
Definición
El estado de un sistema dinámico es un conjunto de
cantidades físicas, cuya especificación (si no se tiene
una excitación externa) determina de forma completa la
evolución del sistema
B. Friedland, Control System Design
Comentario: Esto implicaría que el número de condiciones iniciales que
deben ser especificadas constituye el orden del sistema, y por ende el
número de variables de estado necesarias para determinar el mismo.
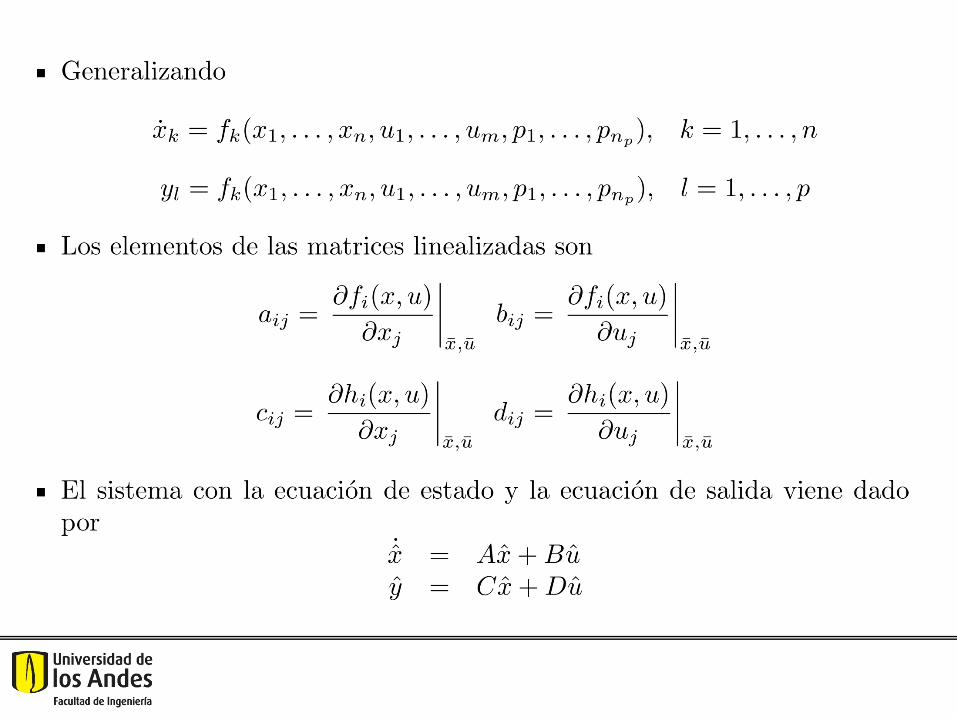
Forma General
Forma General: Definiciones
Forma General: Definiciones
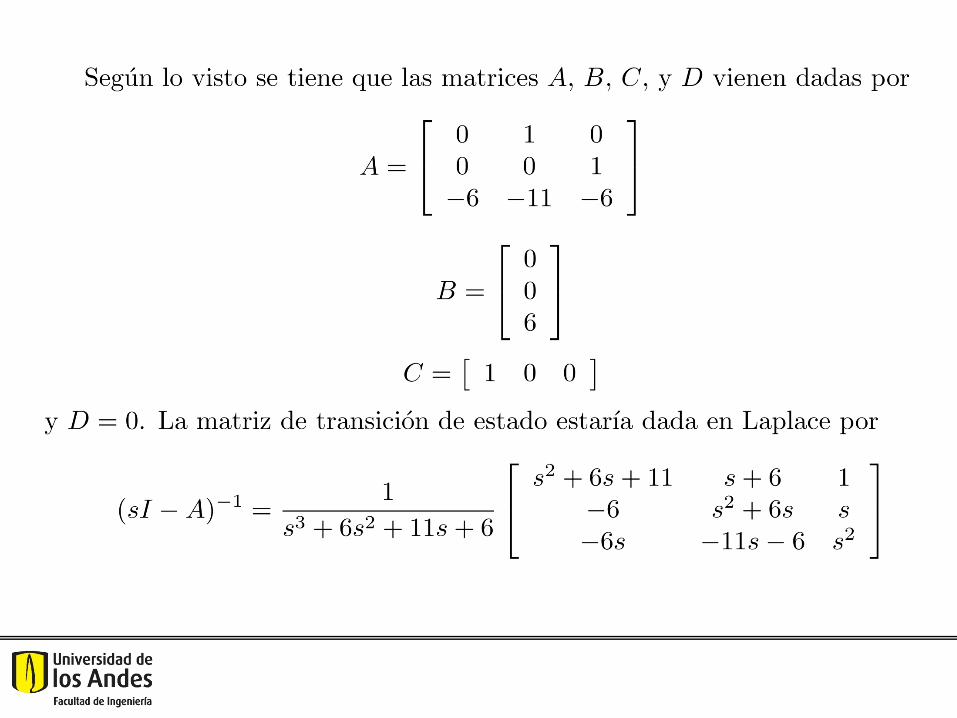
Ejemplos
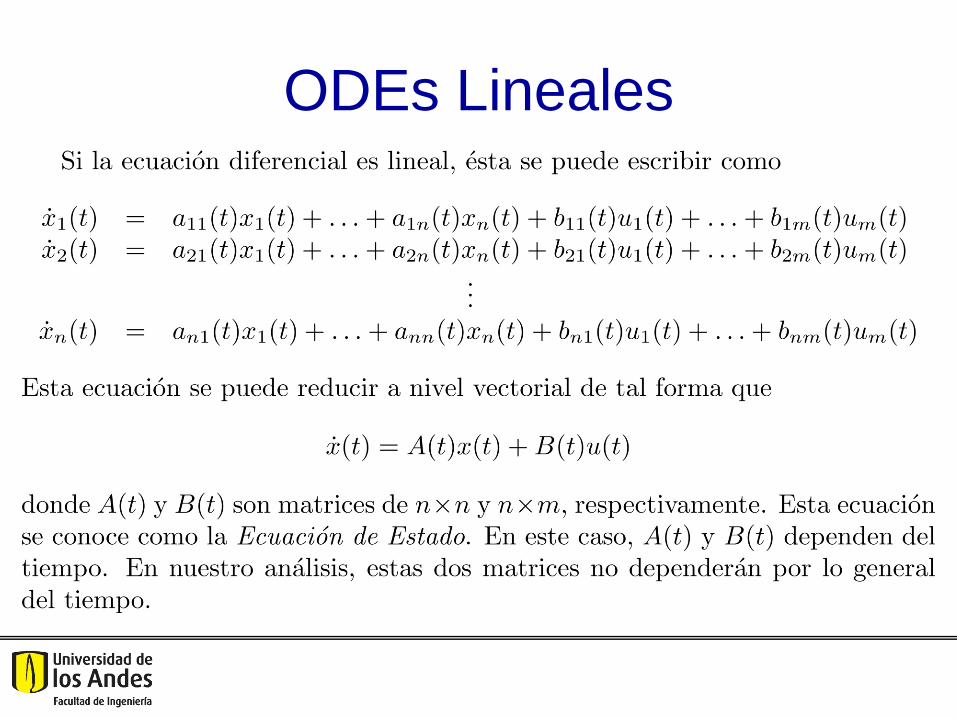
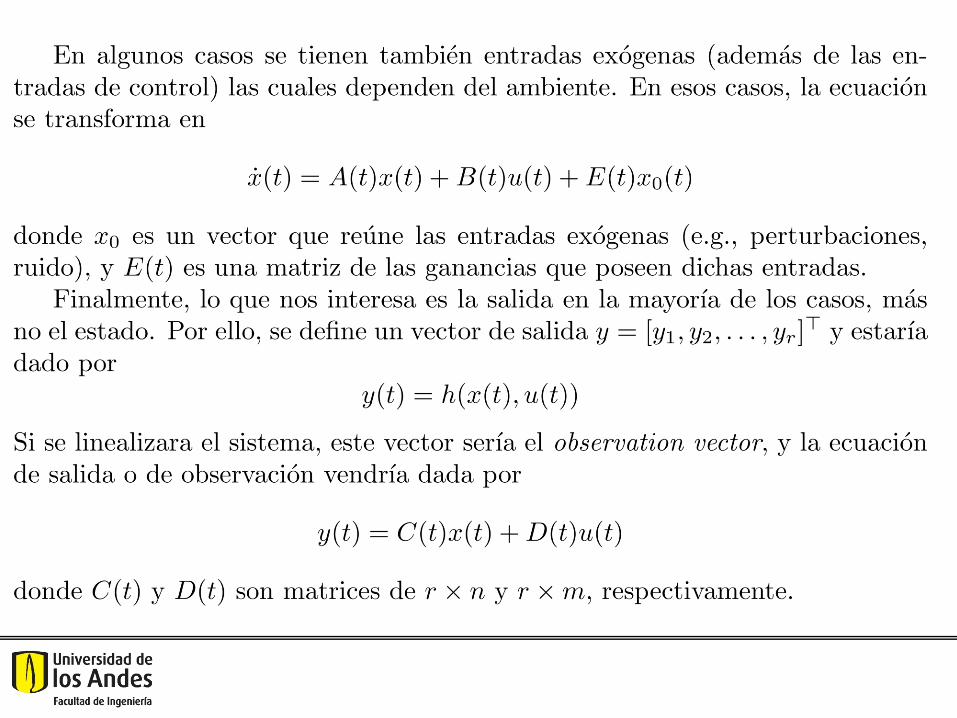
ODEs Lineales
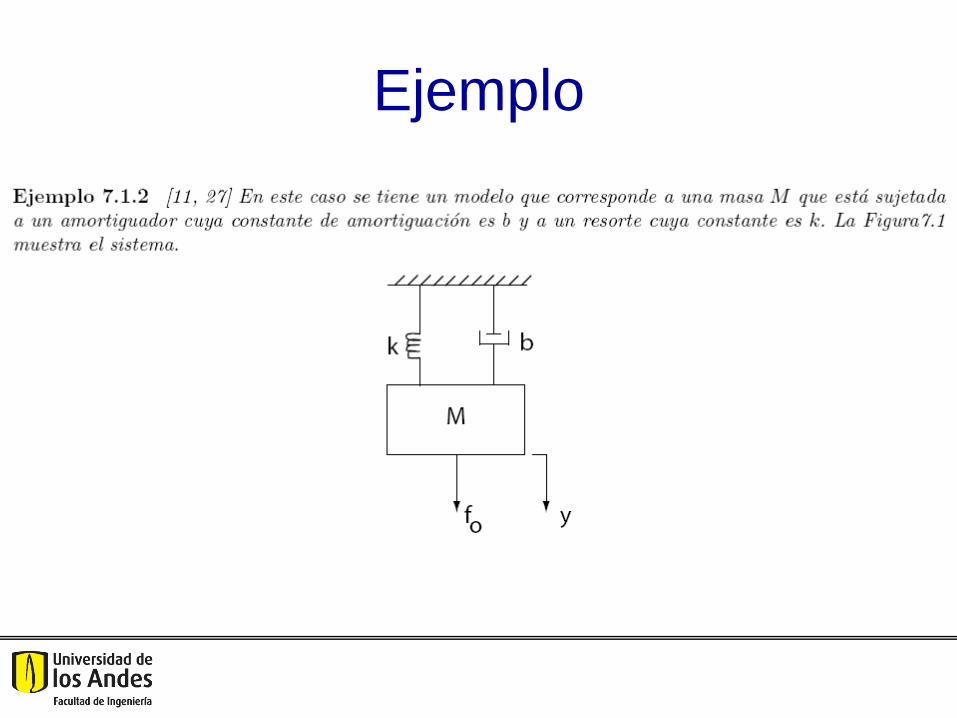
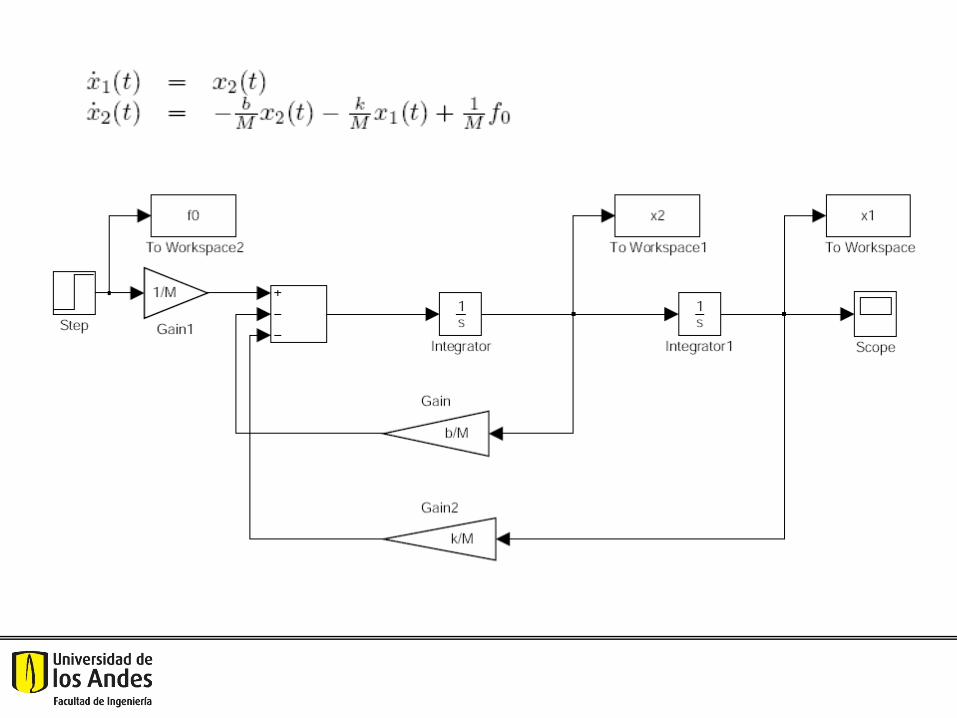
Ejemplo
Solución Ecuación de Estado
Propiedades de la Matriz de
Transición de Estado
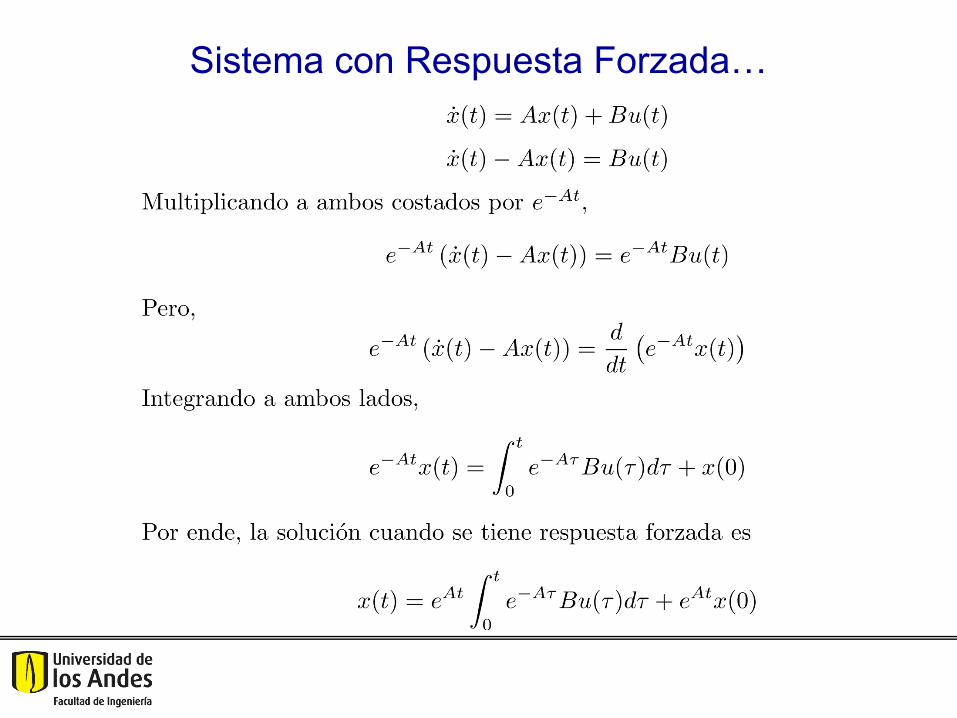
Sistema con Respuesta Forzada…
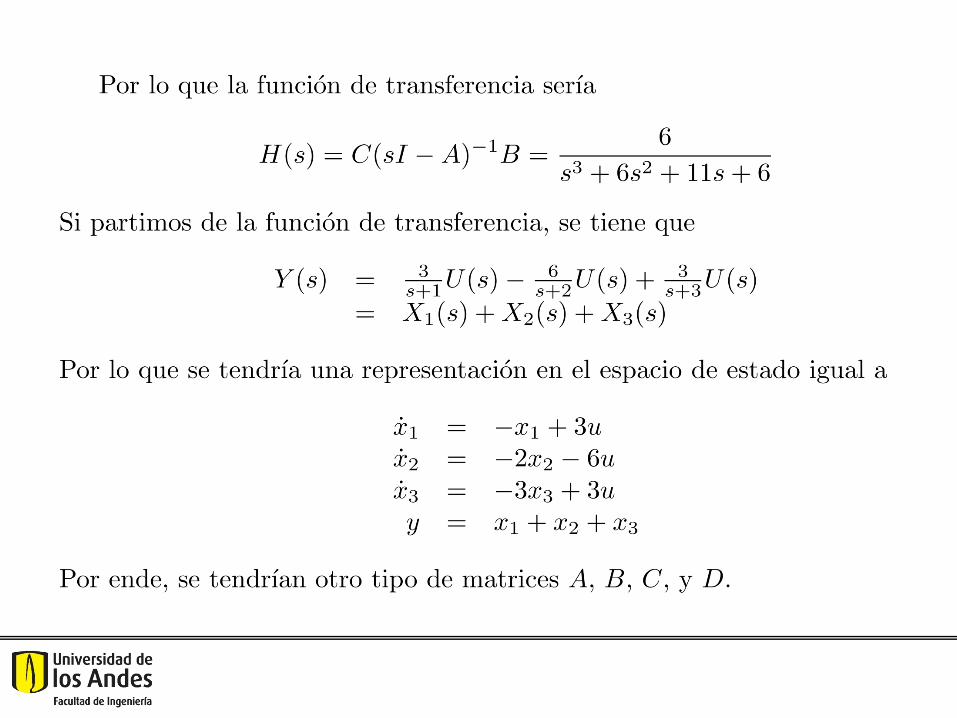
Funciones de Transferencia
Ejemplo
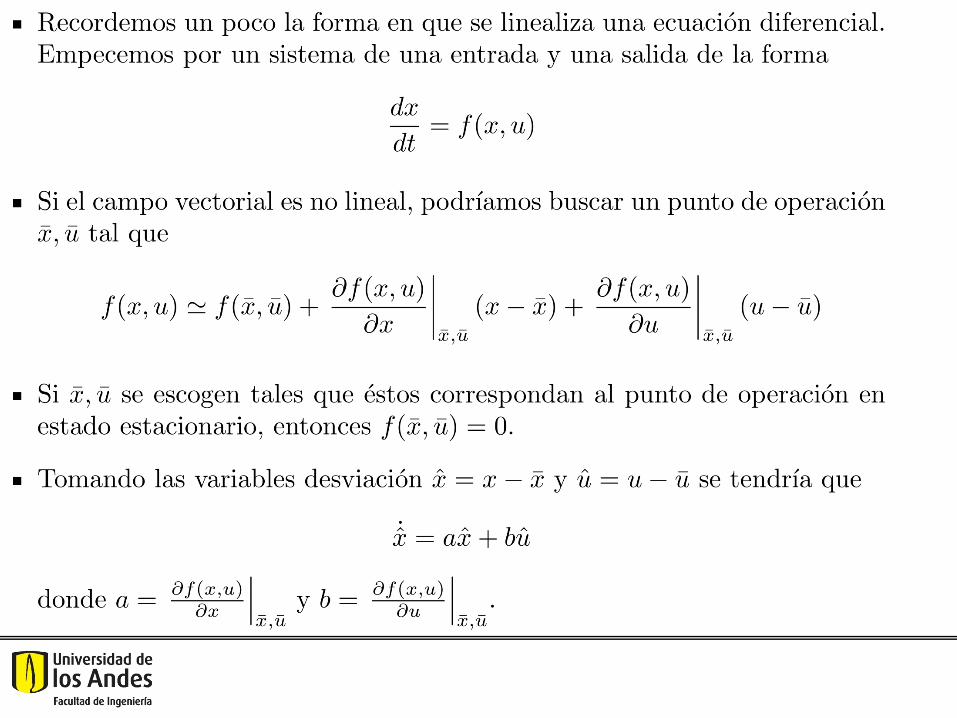
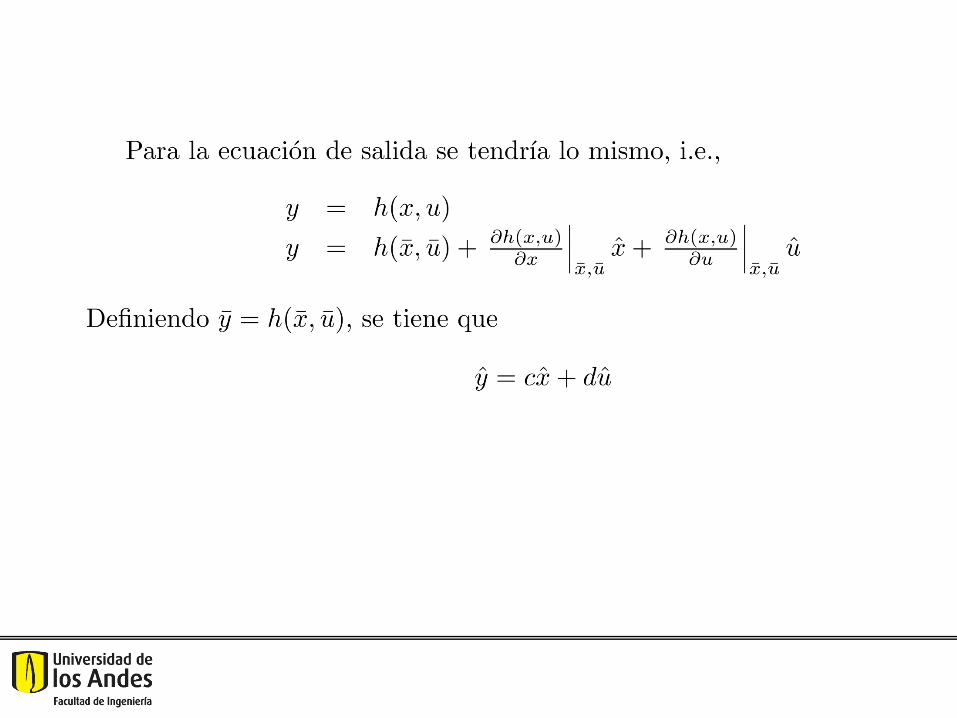
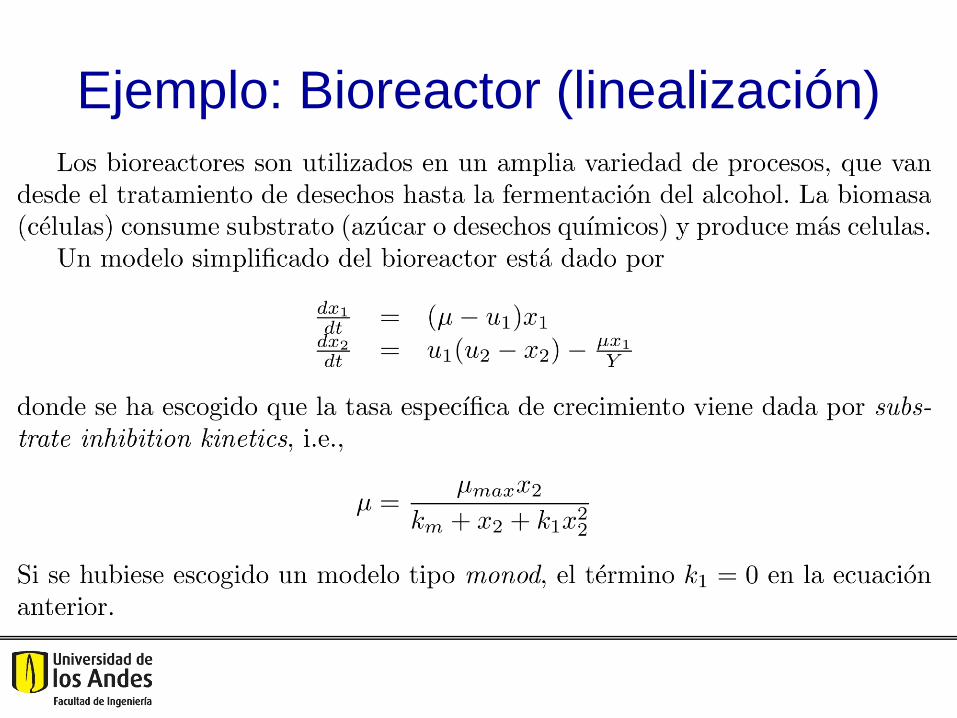
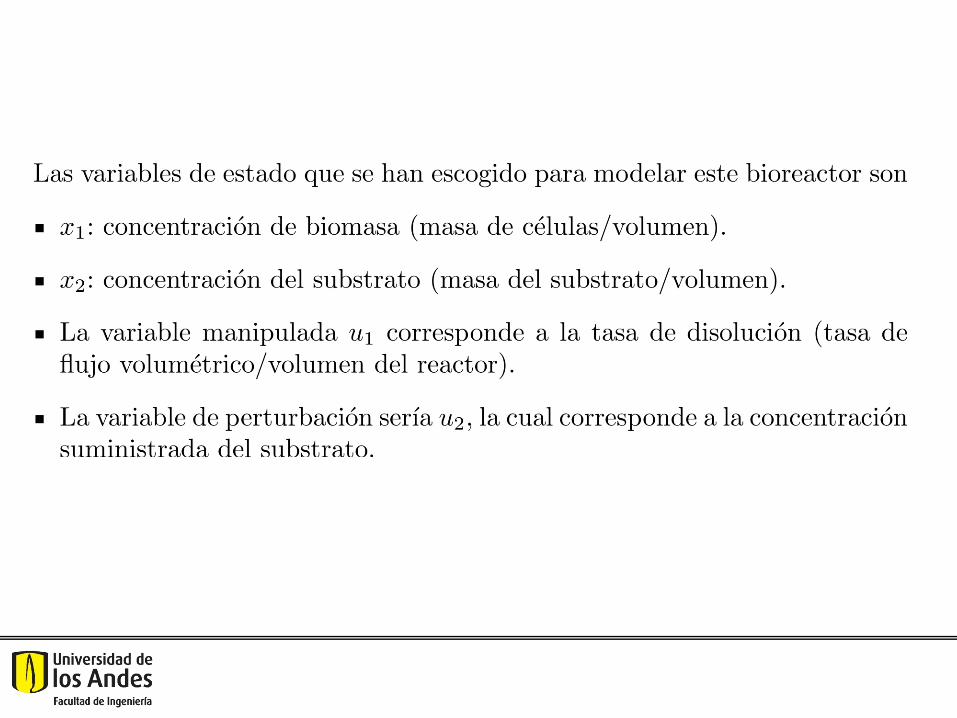
Ejemplo: Bioreactor (linealización)
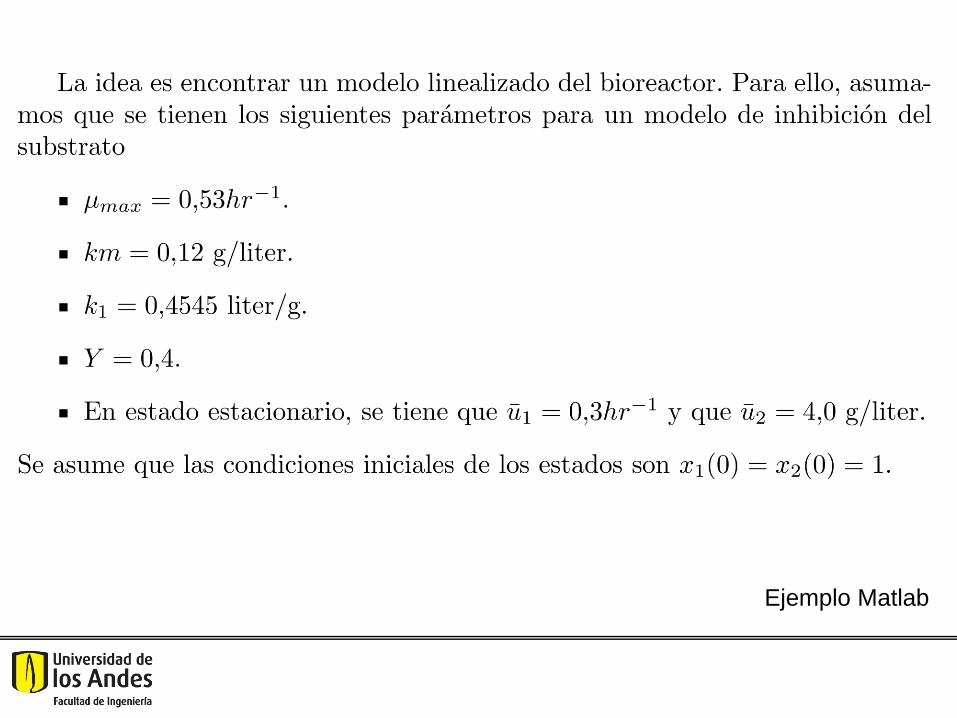
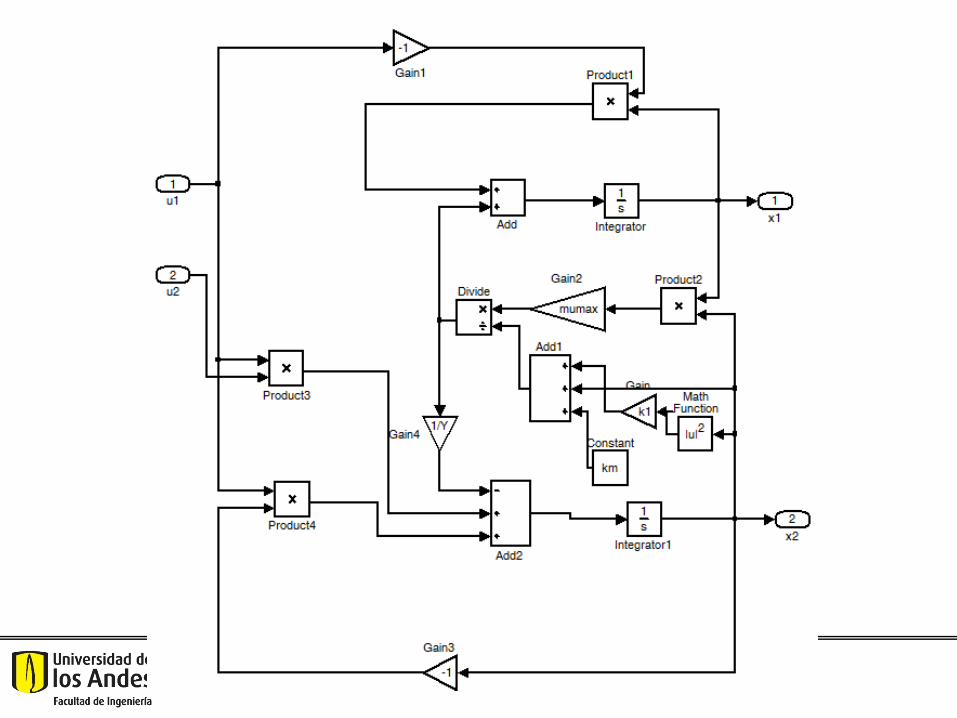
Ejemplo Matlab
RESPUESTA DE SISTEMAS DE
ORDEN 2 Y SUPERIOR
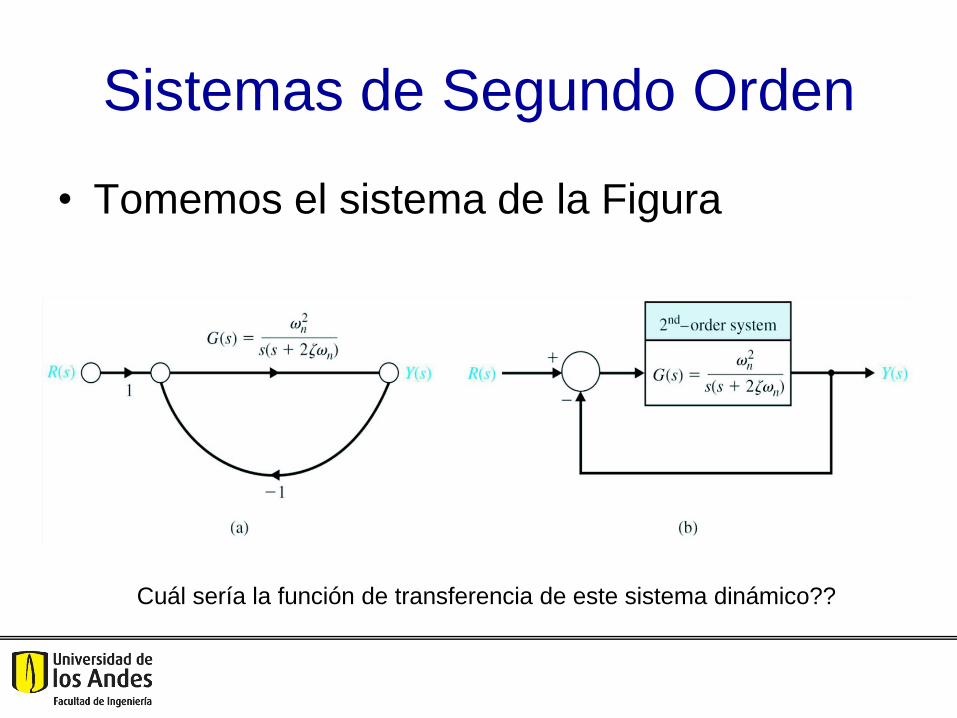
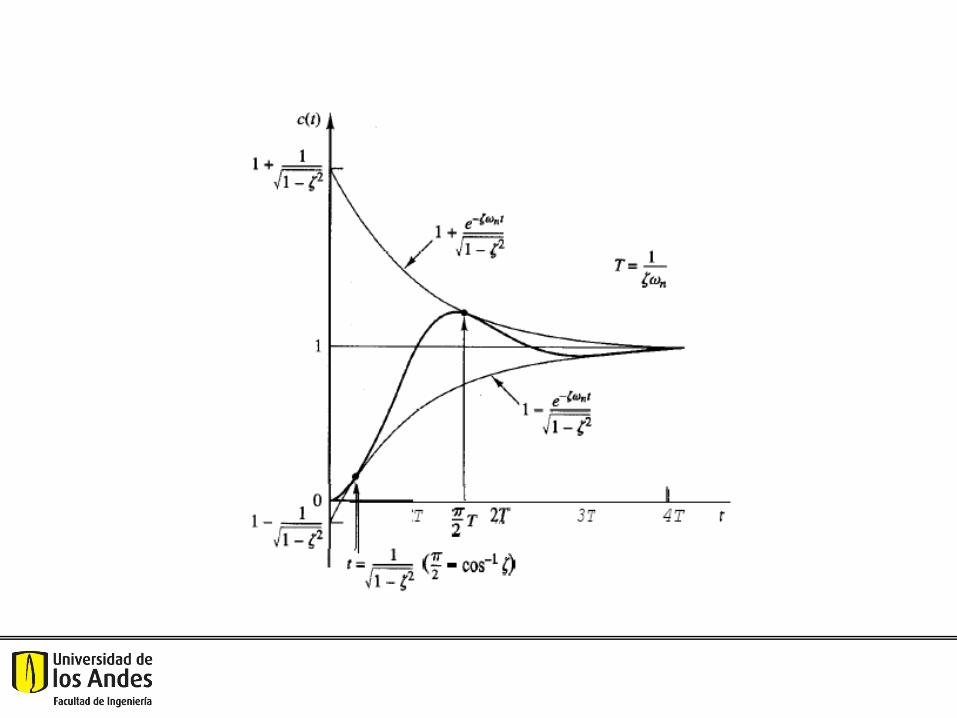
Sistemas de Segundo Orden
• Tomemos el sistema de la Figura
Cuál sería la función de transferencia de este sistema dinámico??
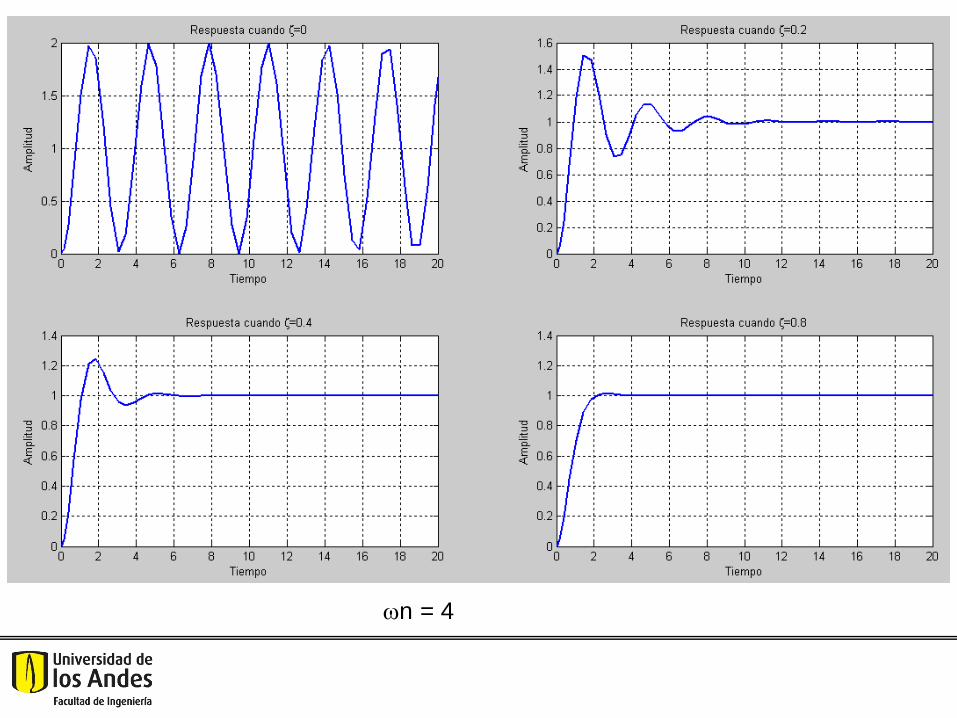
wn = 4
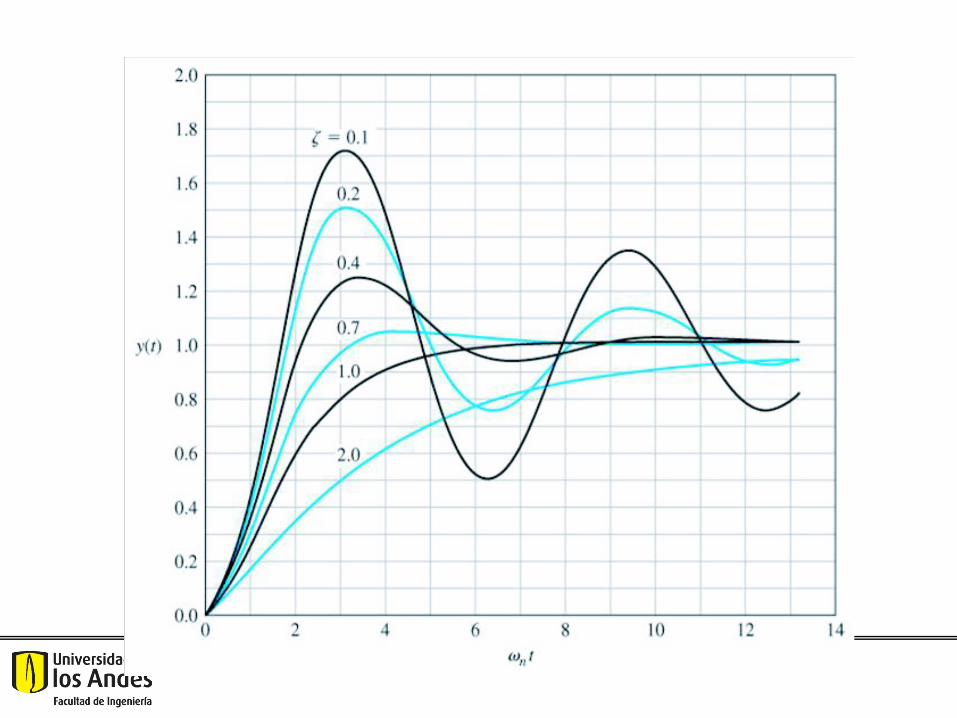
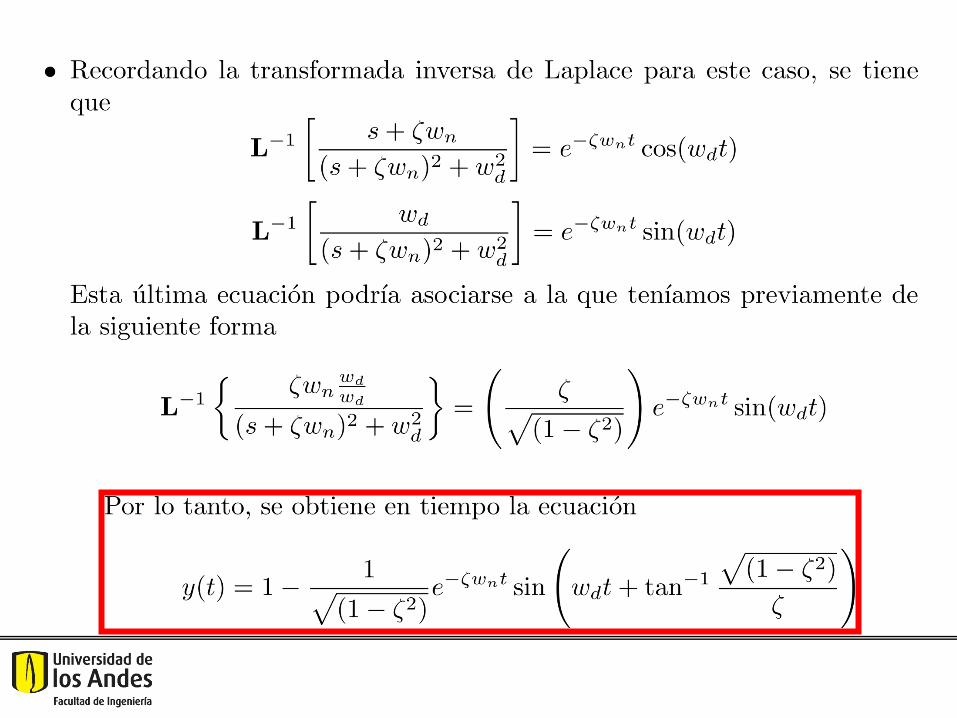
Caso Subamortiguado (0<z<1)
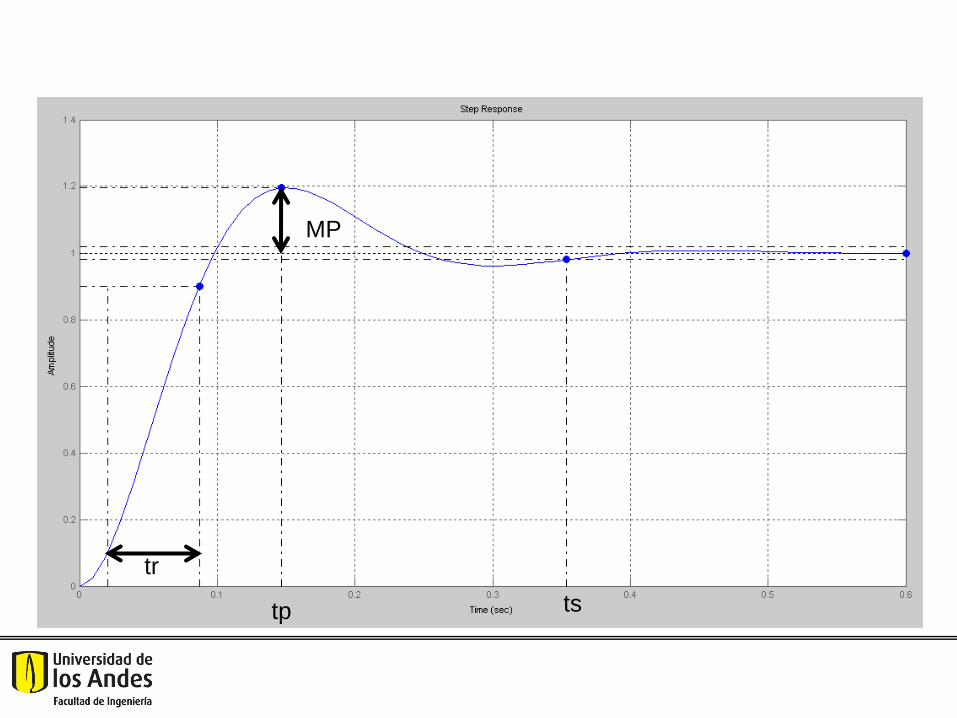
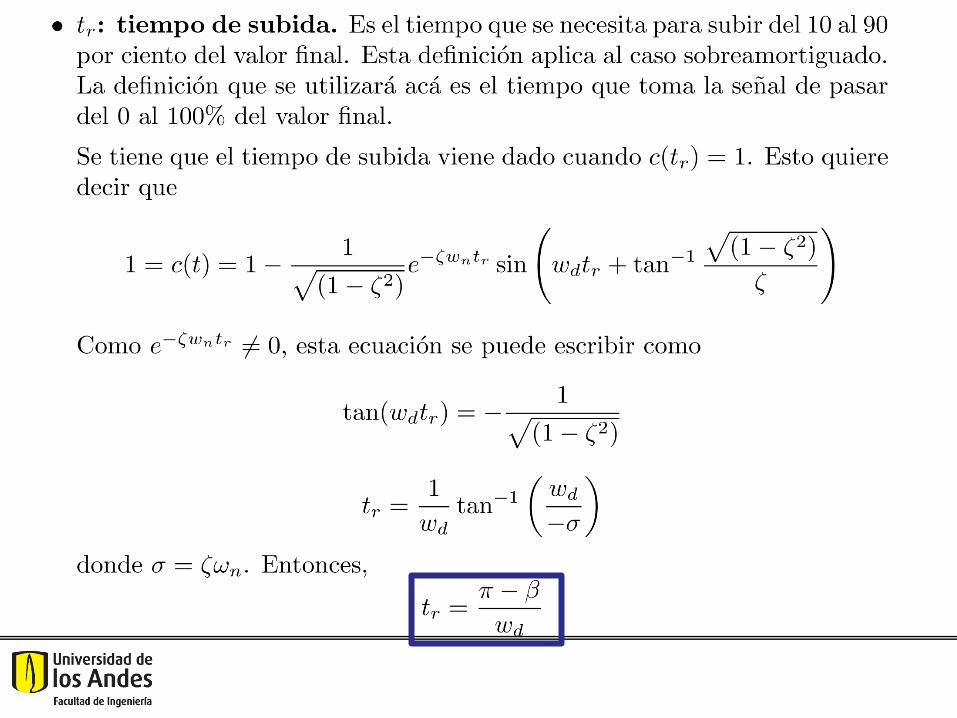
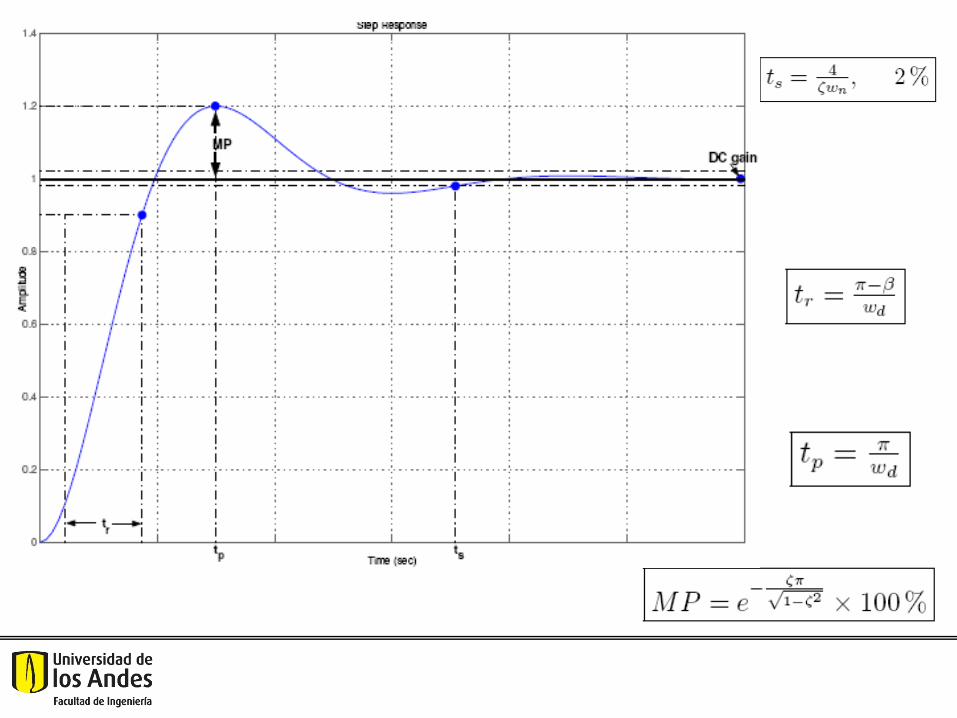
tr
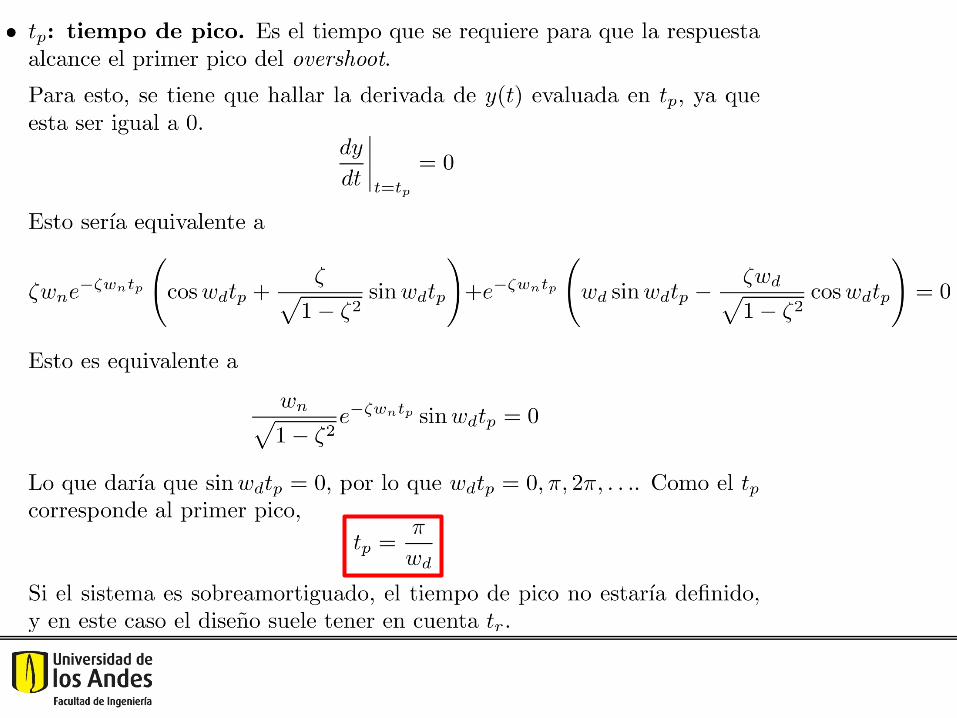
tp
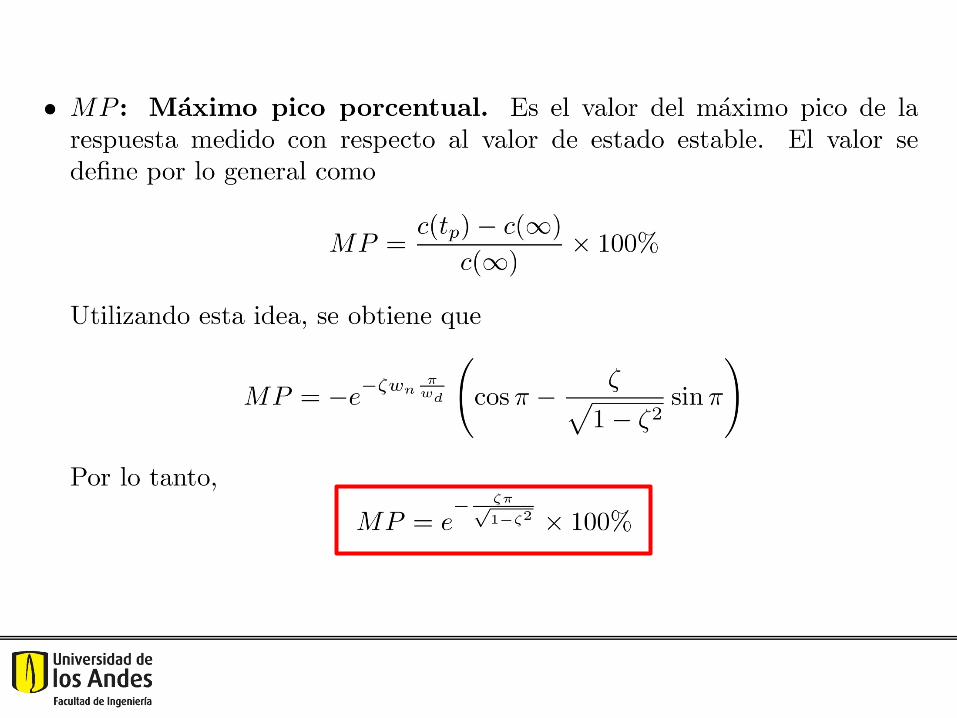
MP
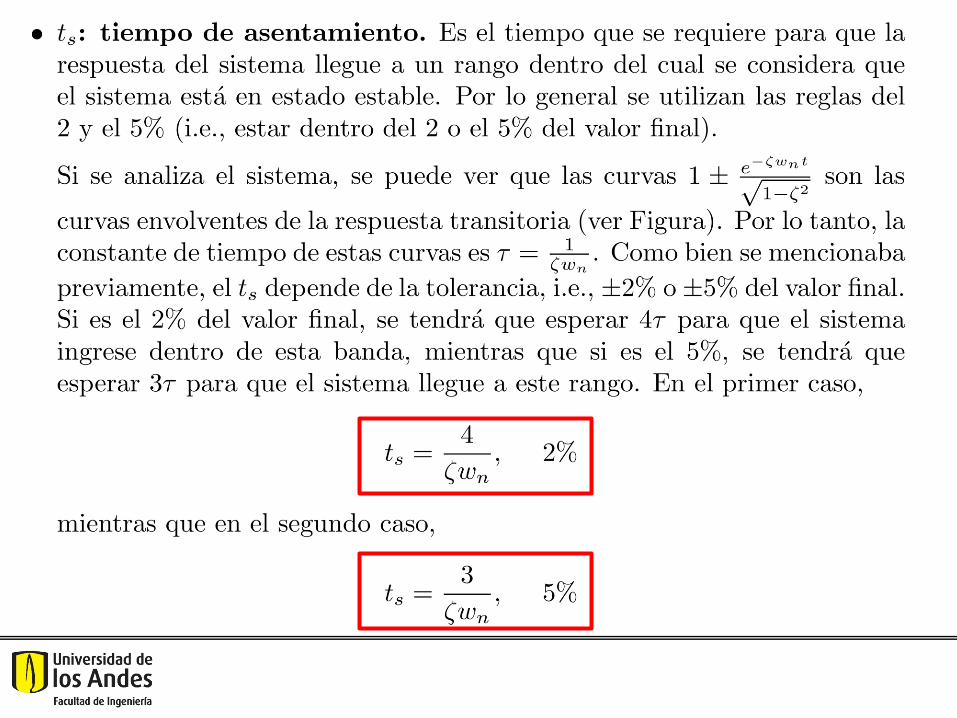
ts
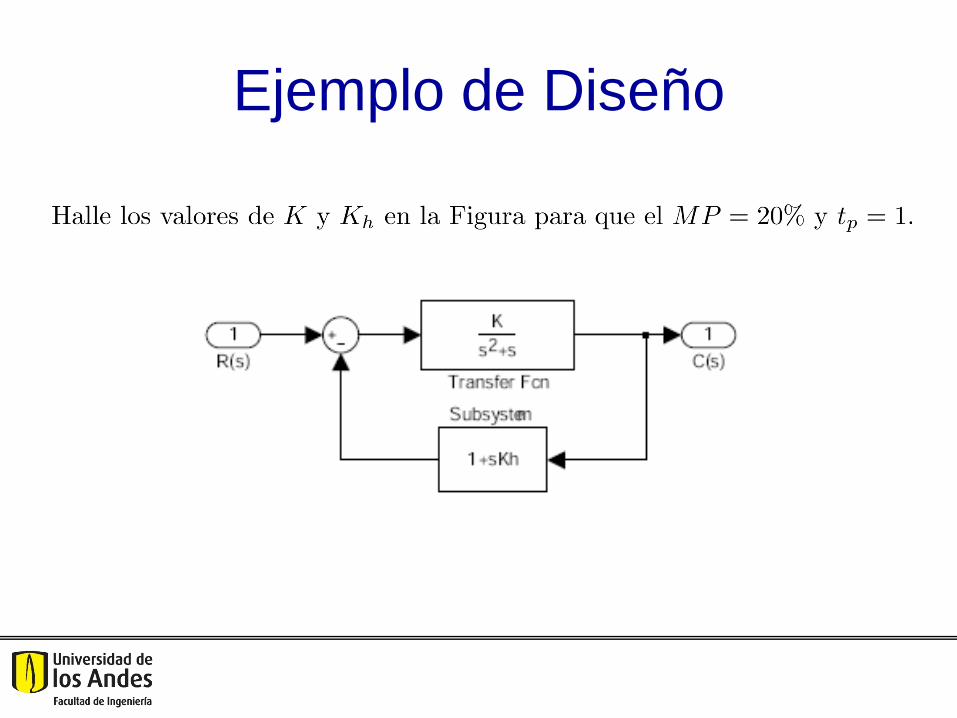
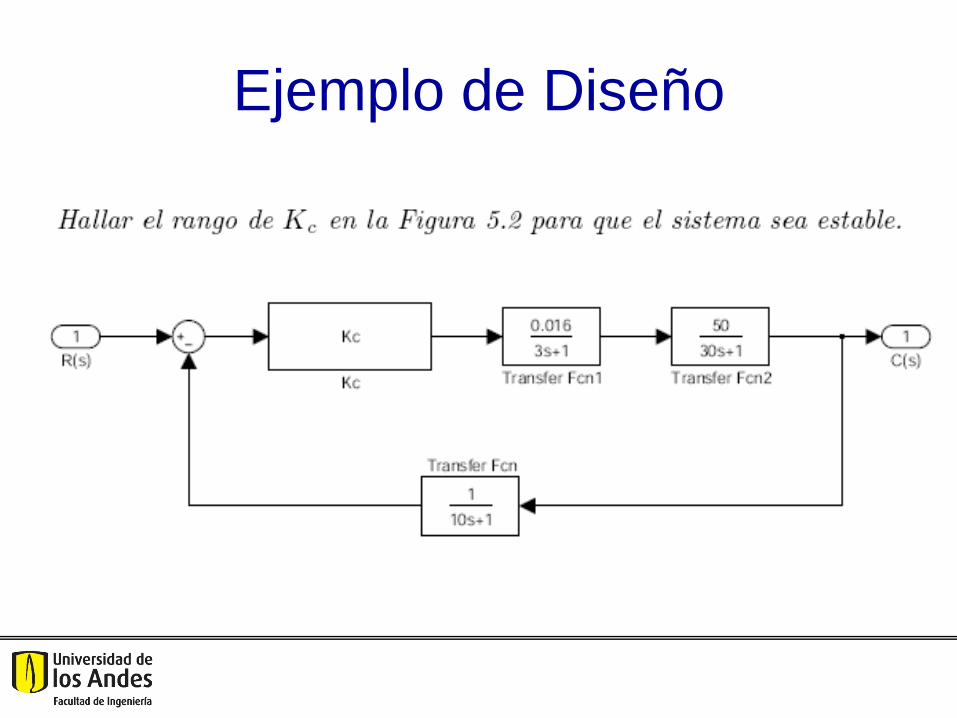
Ejemplo de Diseño
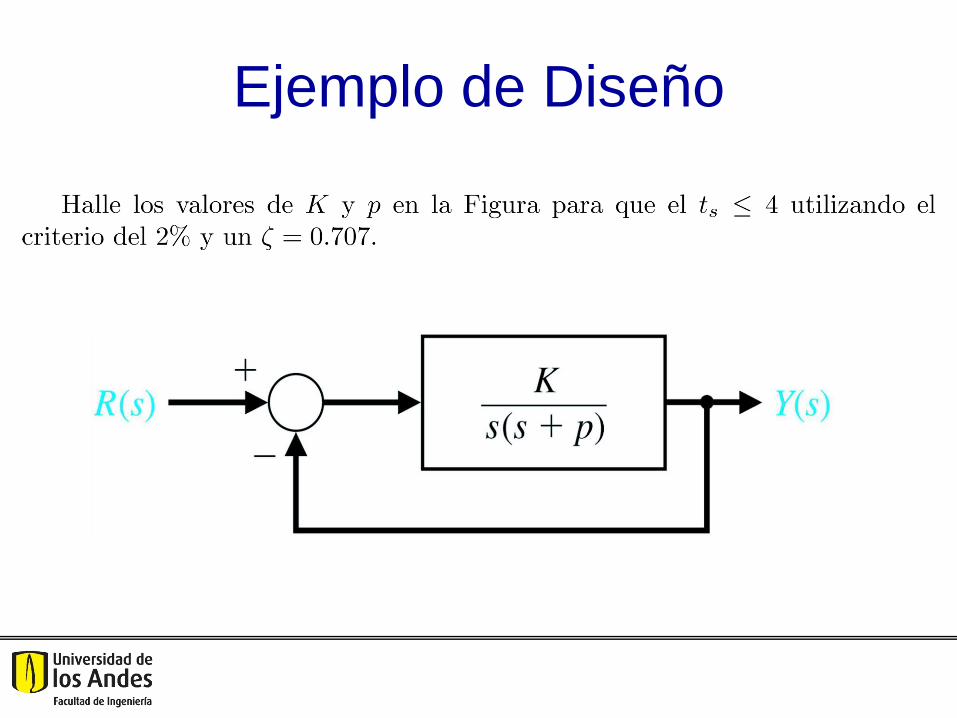
Ejemplo de Diseño
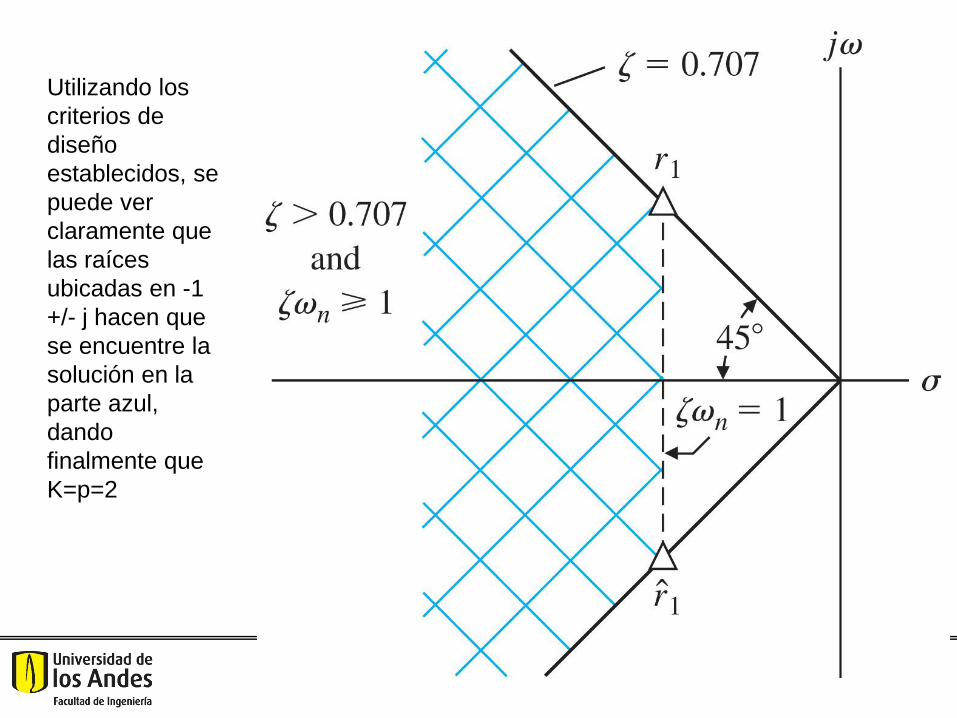
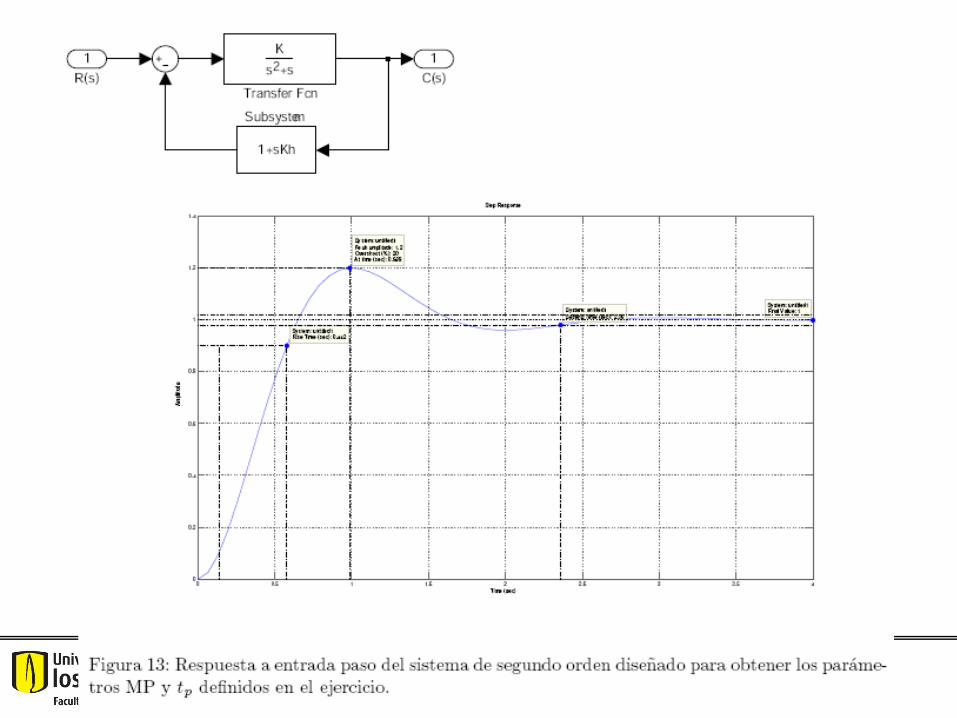
Utilizando los
criterios de
diseño
establecidos, se
puede ver
claramente que
las raíces
ubicadas en -1
+/- j hacen que
se encuentre la
solución en la
parte azul,
dando
finalmente que
K=p=2
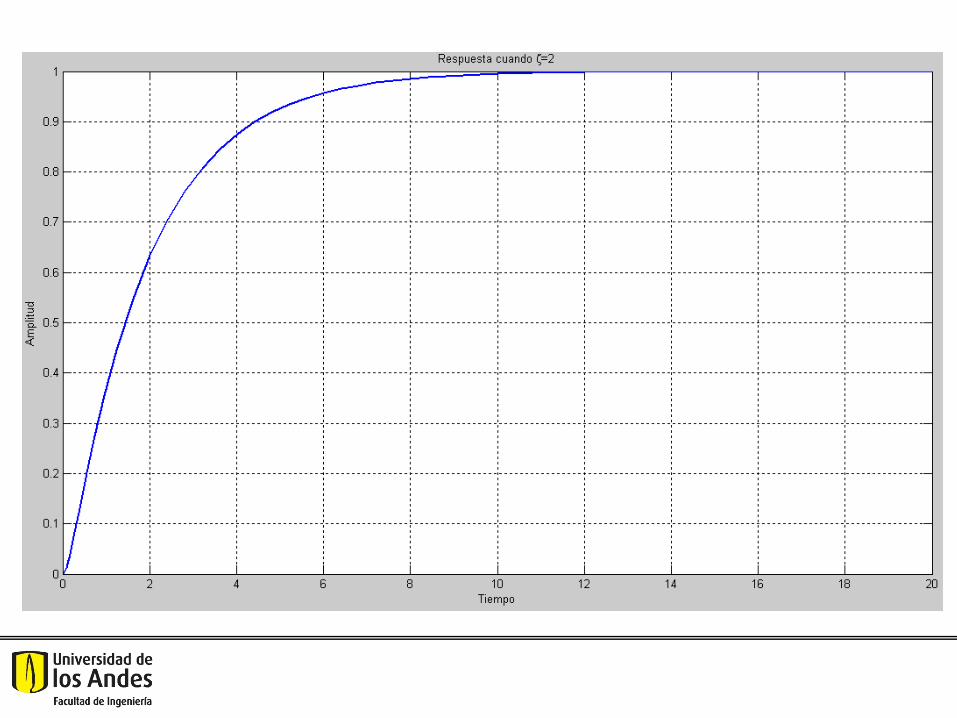
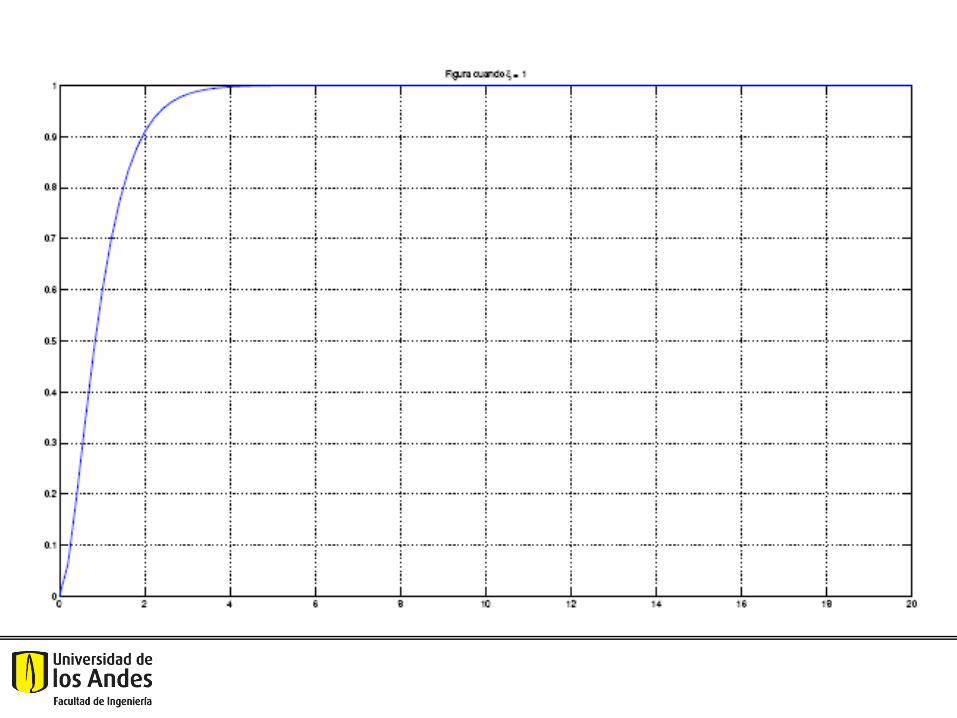
Caso Críticamente Amortiguado z=1
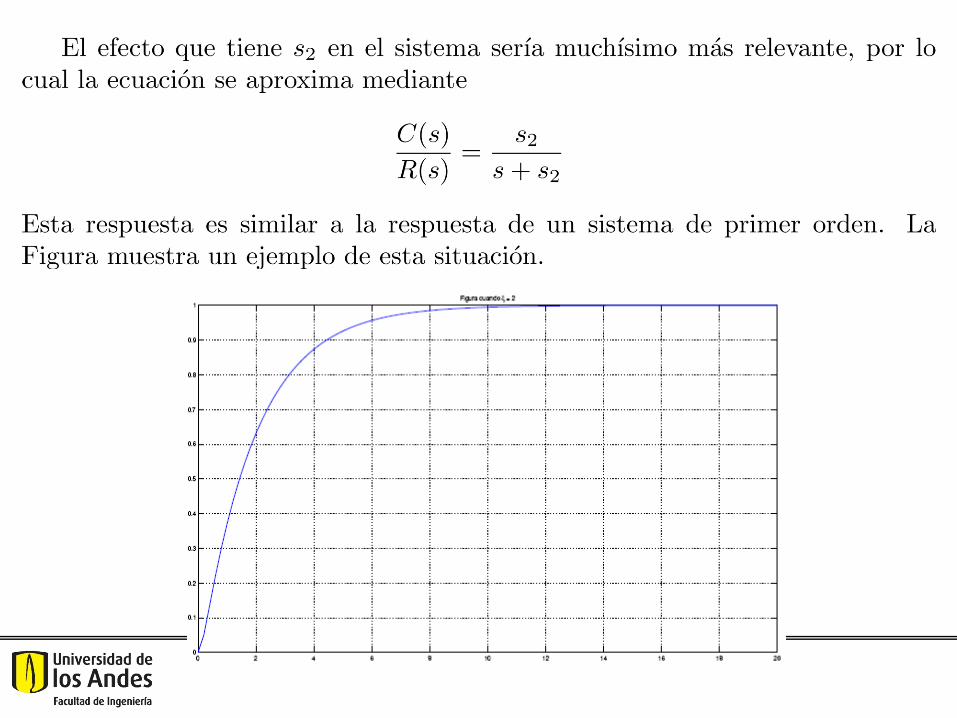
Caso Sobreamortiguado (z>1)
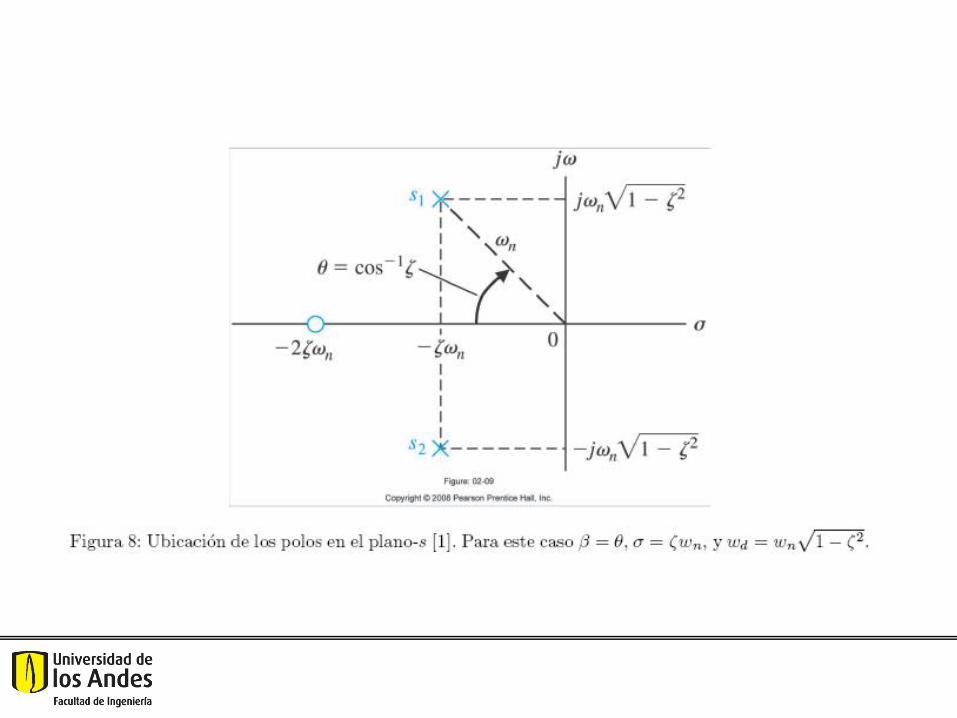
Ubicación Raíces en Plano-s
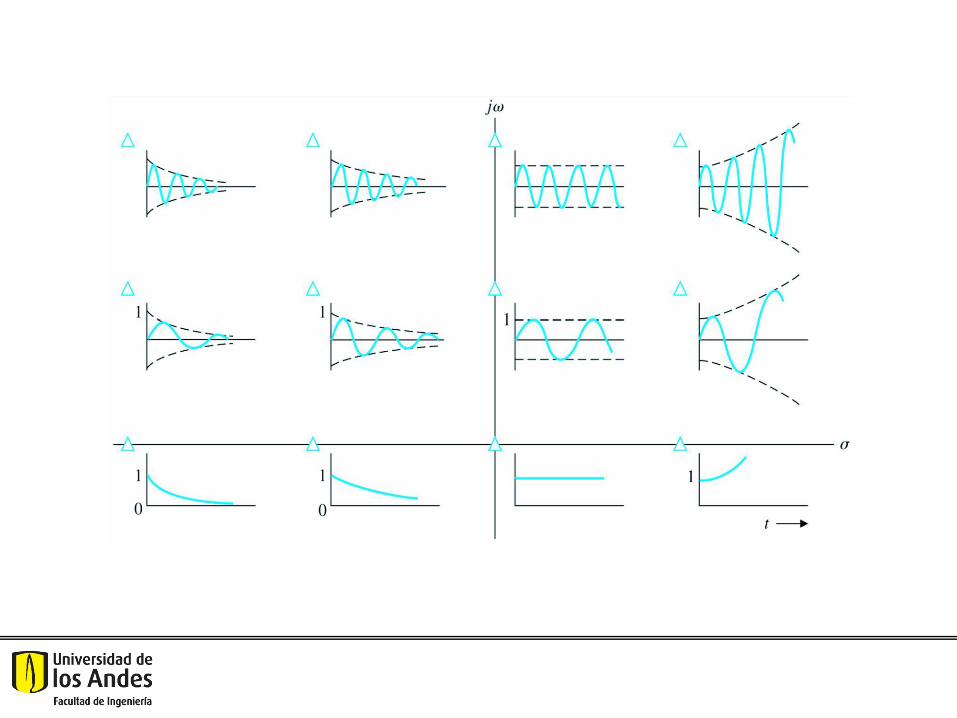
Resumiendo…
• La respuesta está determinada por los
polos y los residuos.
• Los polos cercanos al eje imaginario
corresponden a los componentes lentos
de la solución.
• Los polos cercanos al eje imaginario
determinan la forma de la respuesta, a no
ser que los residuos sean pequeños.
Otro método sería…
Ejemplo
ESTABILIDAD DE SISTEMAS
Criterio de Estabilidad de
Routh-Hurwitz
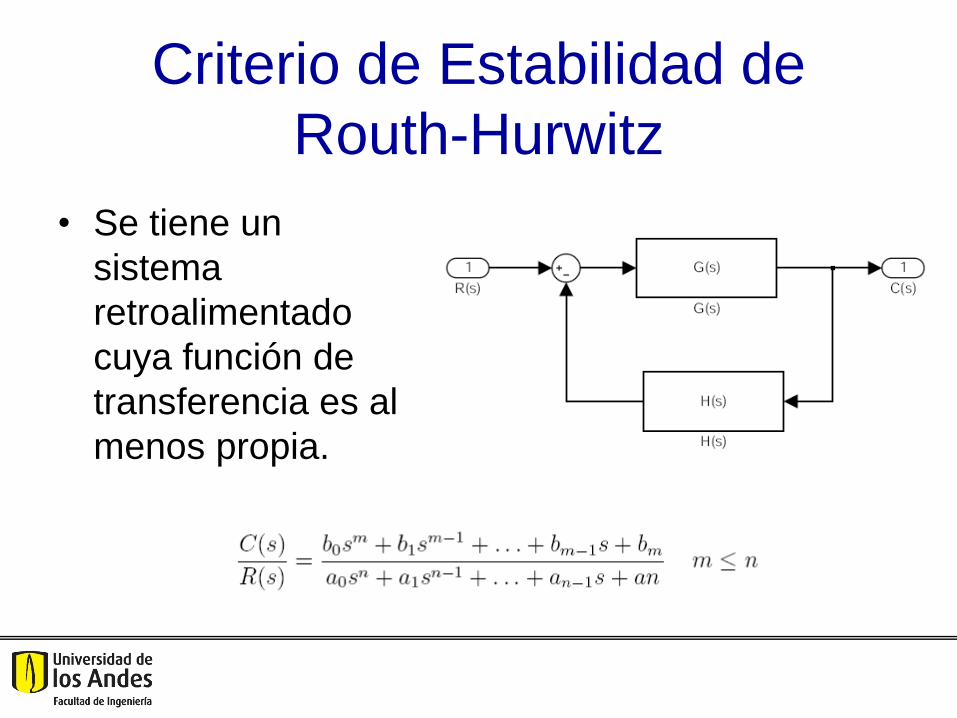
• Se tiene un
sistema
retroalimentado
cuya función de
transferencia es al
menos propia.
Ejemplo
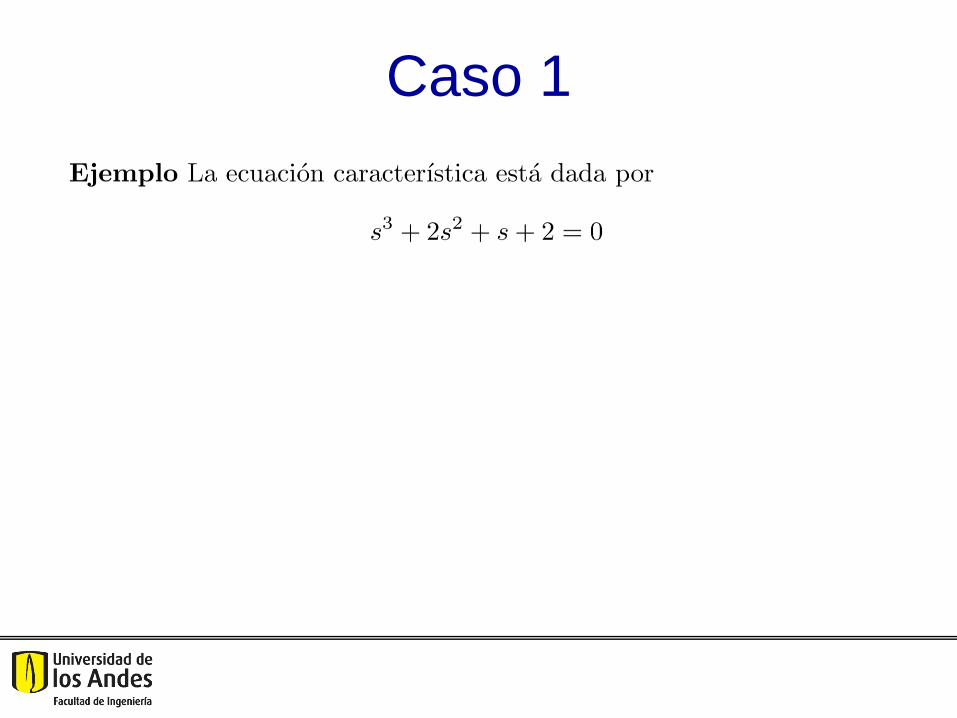
Caso 1
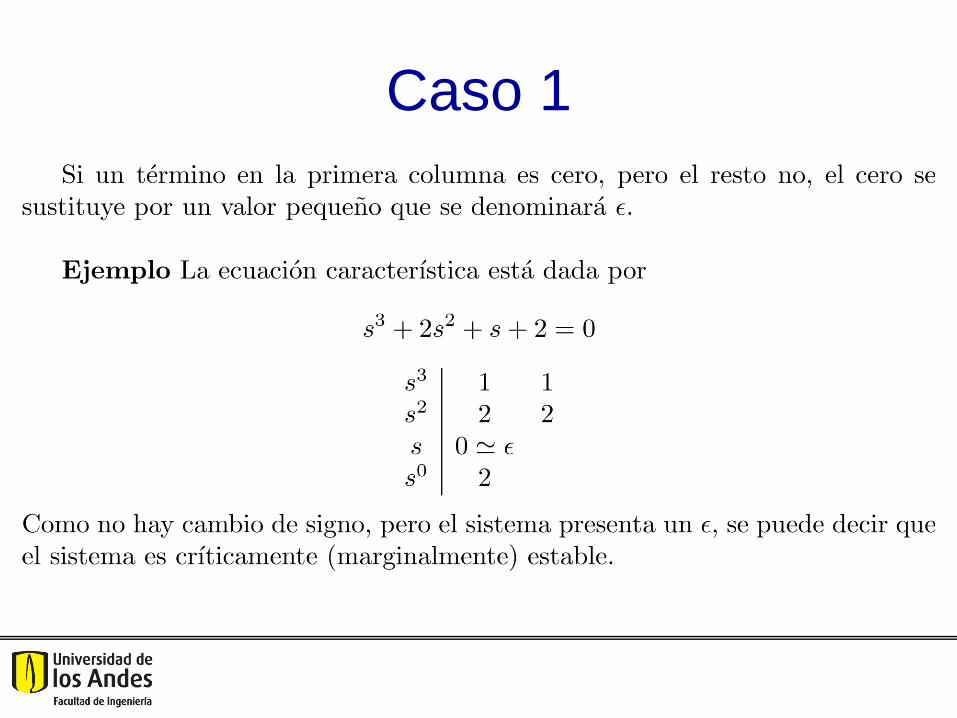
Caso 1
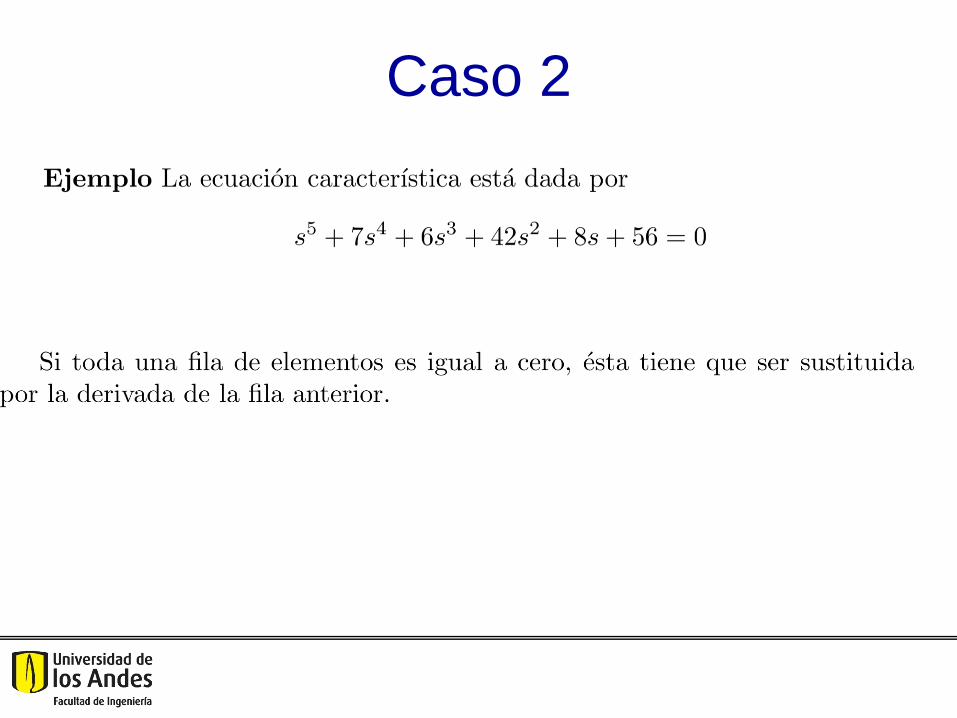
Caso 2
Caso 2
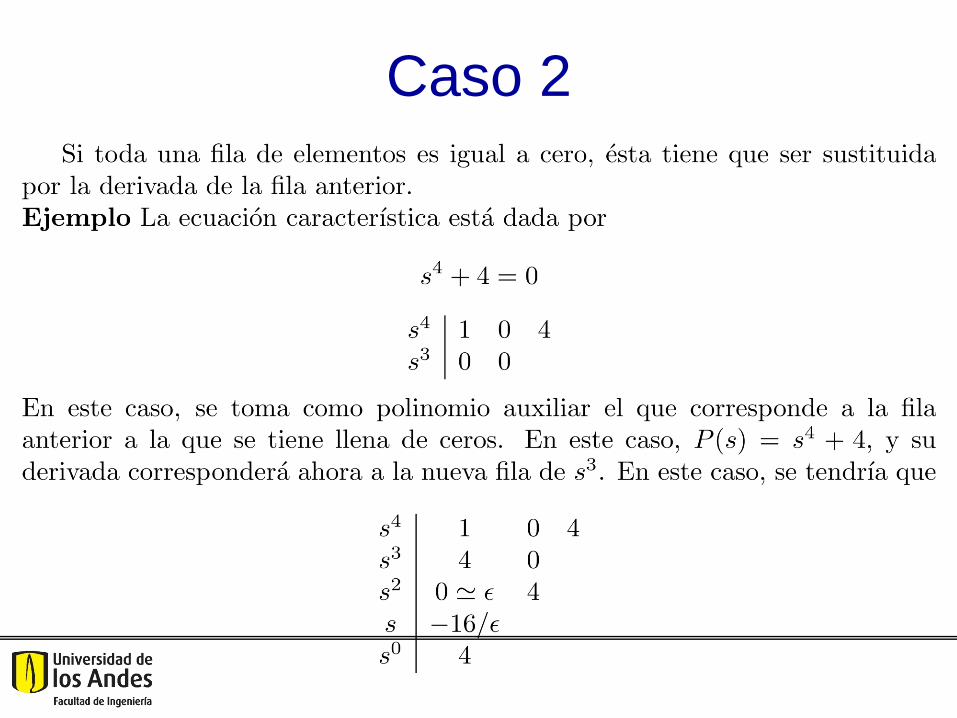
Caso 2
Ejemplo de Diseño
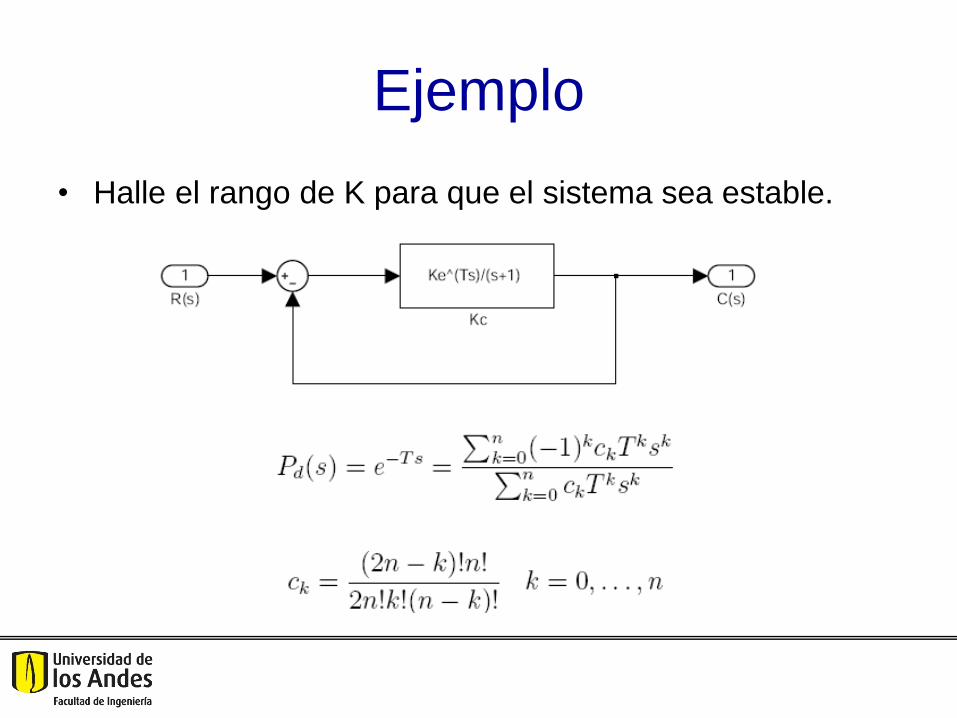
Ejemplo
• Halle el rango de K para que el sistema sea estable.
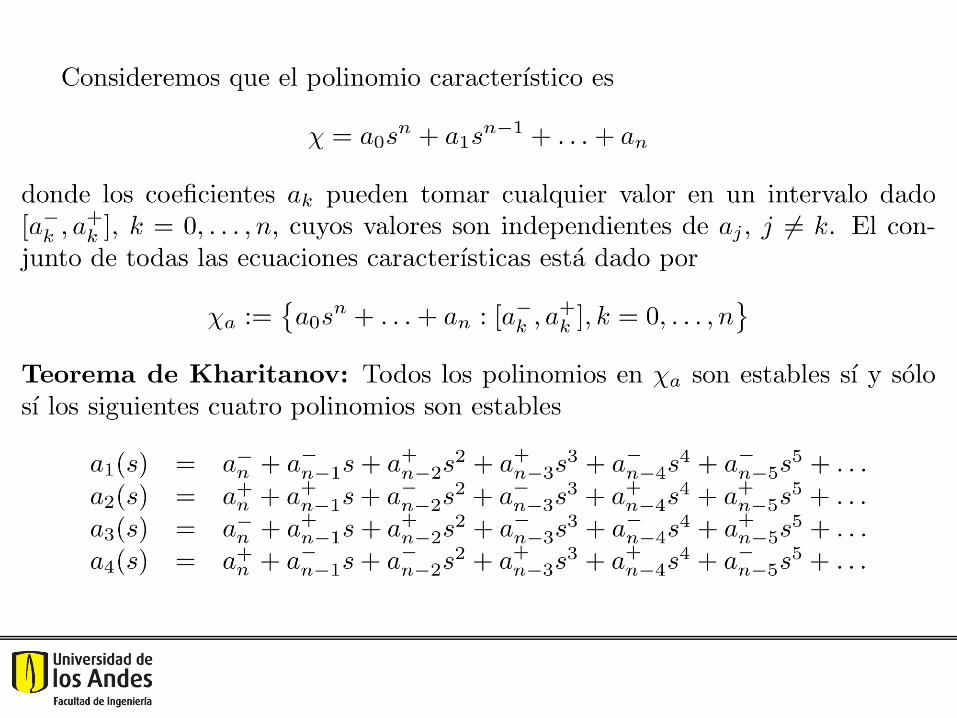
Criterio de Estabilidad de
Kharitanov
• Es un método basado en las ideas
expuestas por Routh-Hurwitz para
entender la robustez de un sistema lineal.
• Existen varios métodos.
• Se busca entender la estabilidad de un
sistema a variación en los parámetros de
un sistema.
Ejemplo

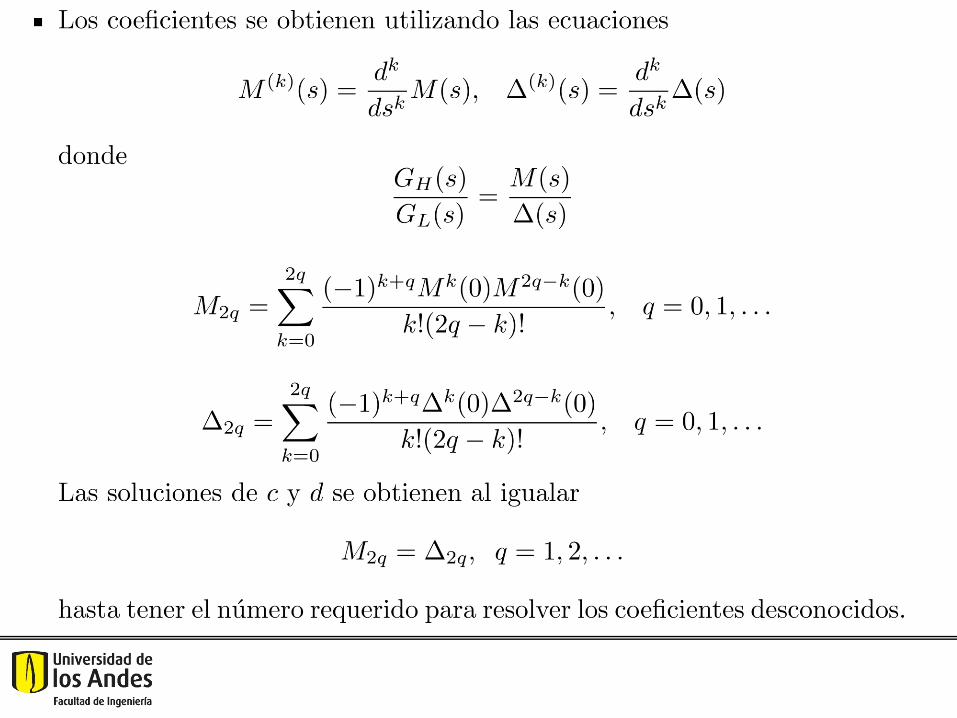
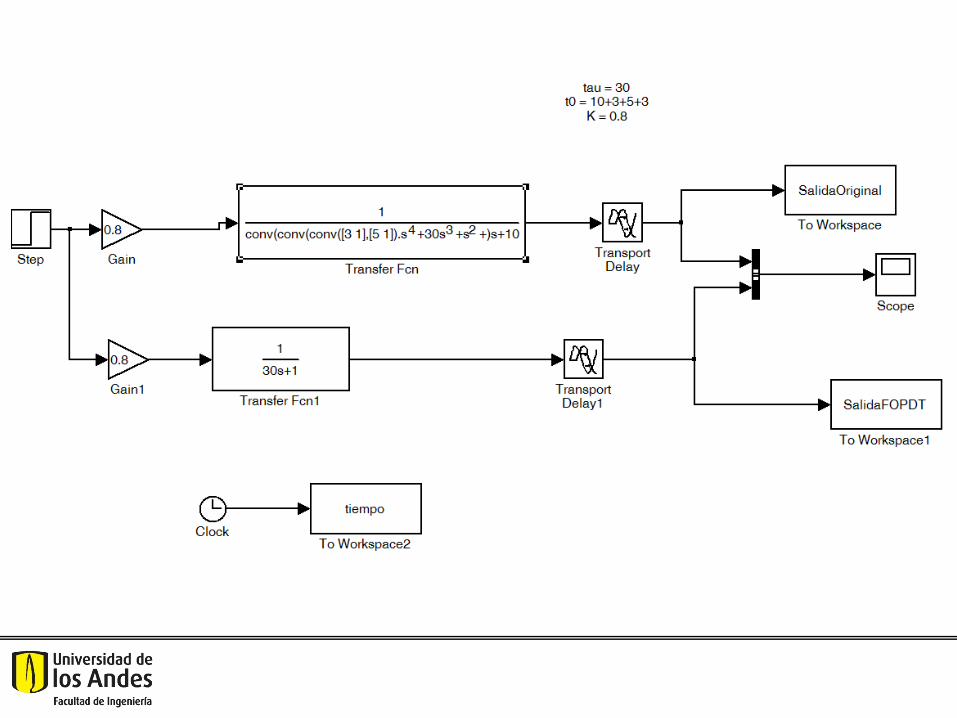
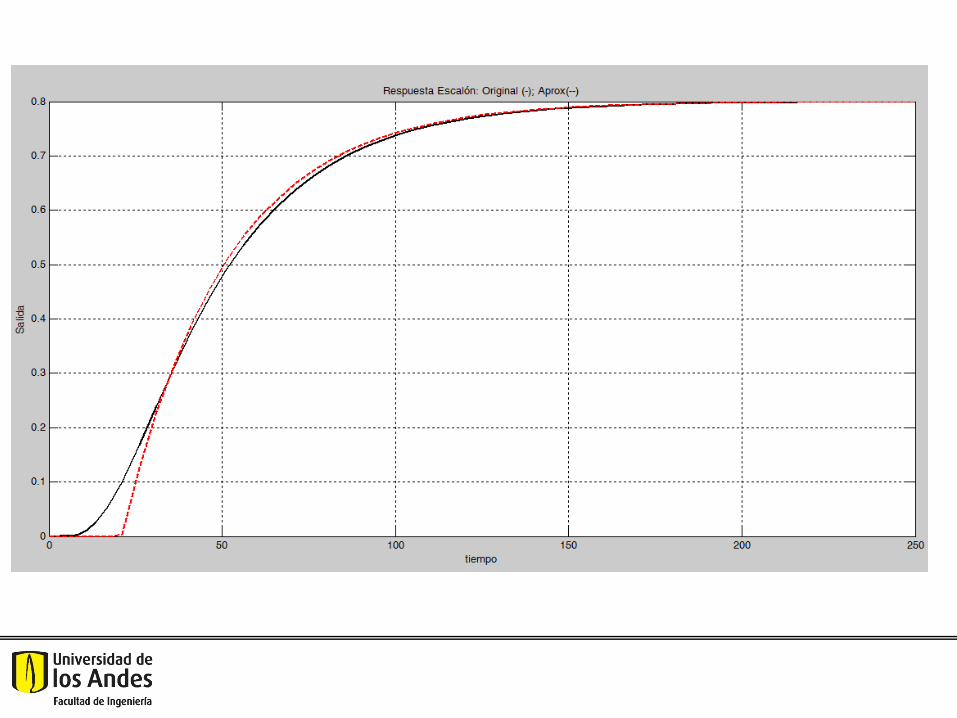
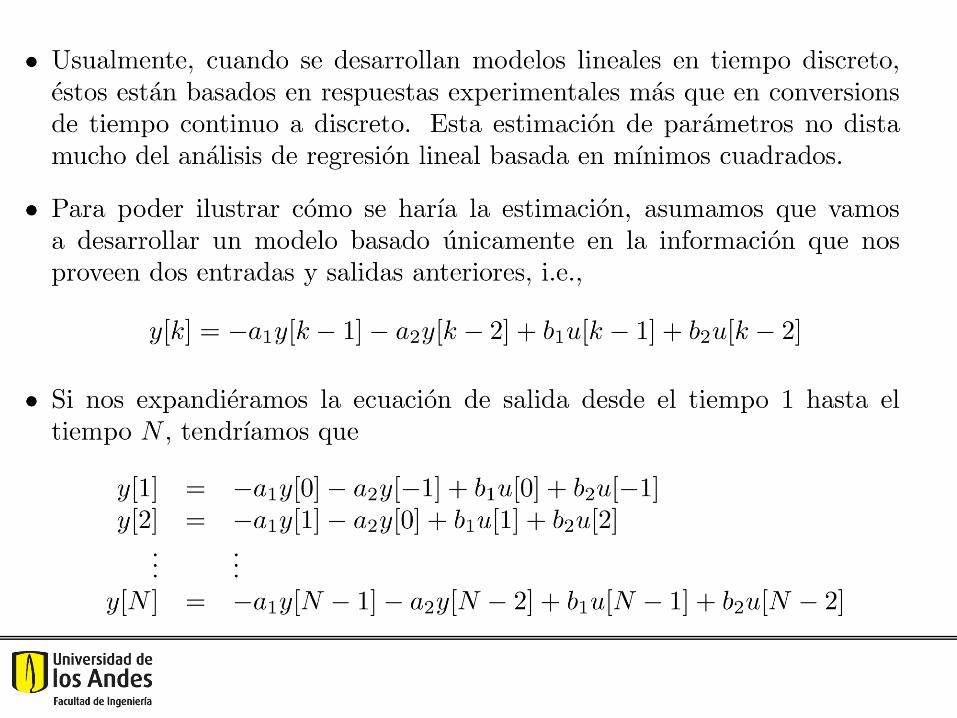
MODELAMIENTO EMPIRICO
• Basado en las ideas que plantea Rovira para la
sintonización de controladores, si uno tuviese
los parámetros de una función de transferencia
de un orden alto, y quisiera estimar el modelo
equivalente de FOPDT, podría seguir un
estimado.
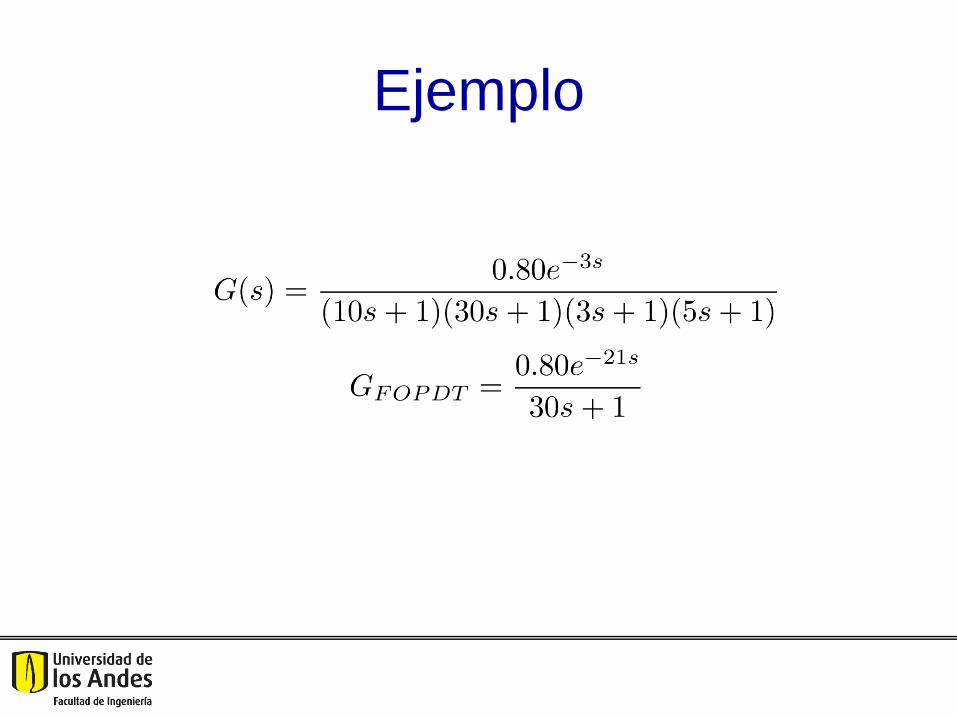
• Si una de las constantes de tiempo del modelo
de orden superior es mucho mayor que las
otras, entonces el tiempo tau es igual a esta
constante. El tiempo muerto sería la suma de
las constantes de tiempo que queden, más el
tiempo muerto del sistema de orden superior.
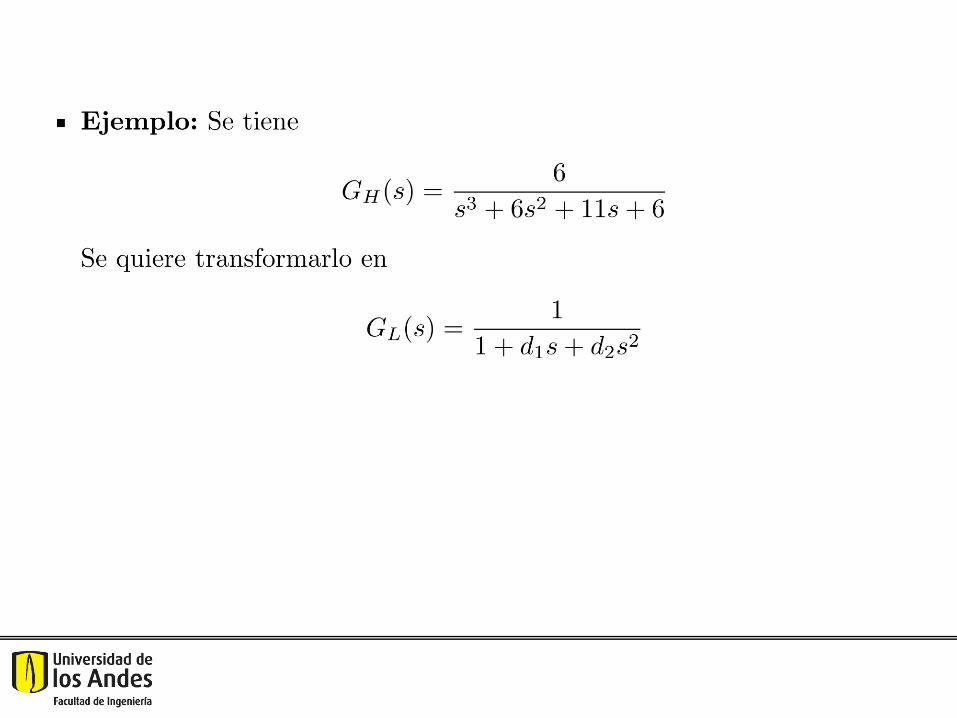
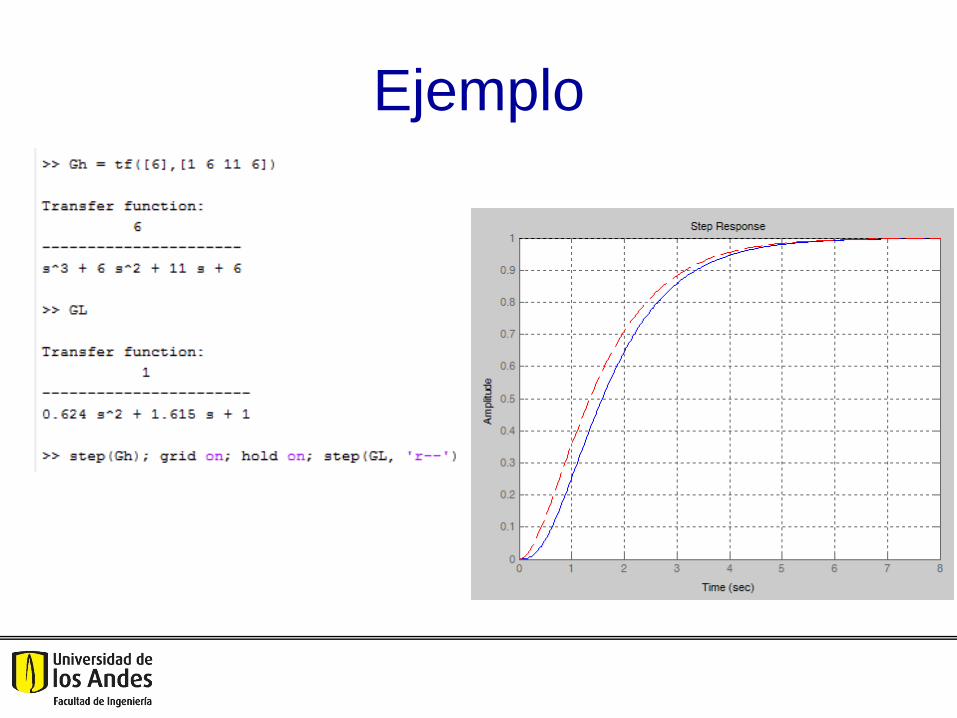
Ejemplo
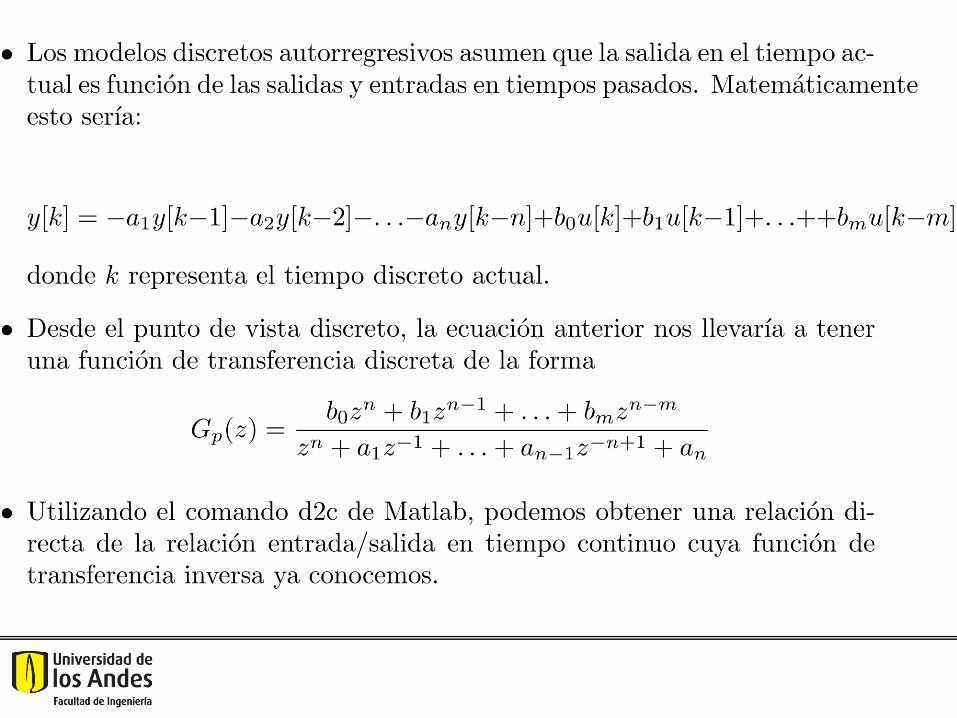
MODELOS
AUTORREGRESIVOS
SISTEMAS EN TIEMPO
DISCRETO
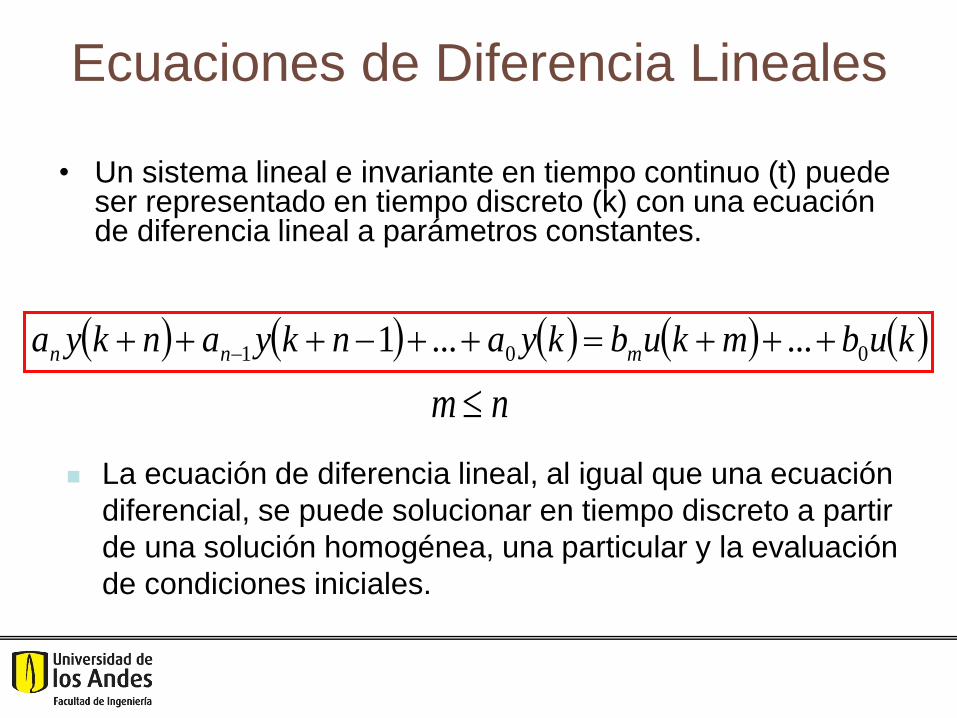
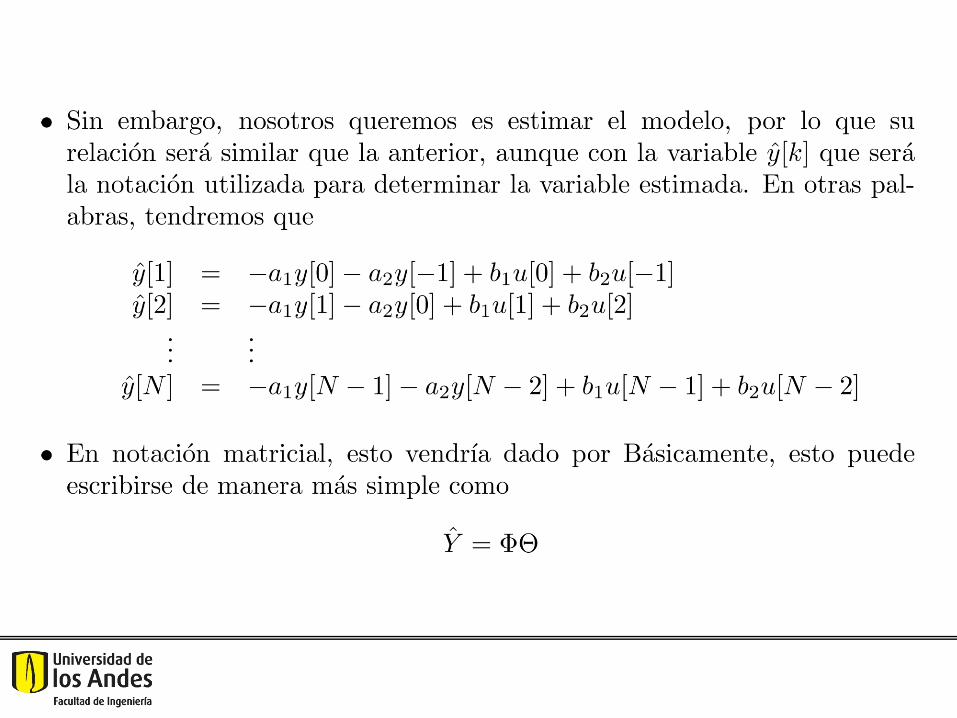
Ecuaciones de Diferencia Lineales
• Un sistema lineal e invariante en tiempo continuo (t) puede ser representado en tiempo discreto (k) con una ecuación de diferencia lineal a parámetros constantes.
kubmkubkyankyankya mnn 001 ......1
La ecuación de diferencia lineal, al igual que una ecuación
diferencial, se puede solucionar en tiempo discreto a partir
de una solución homogénea, una particular y la evaluación
de condiciones iniciales.
nm
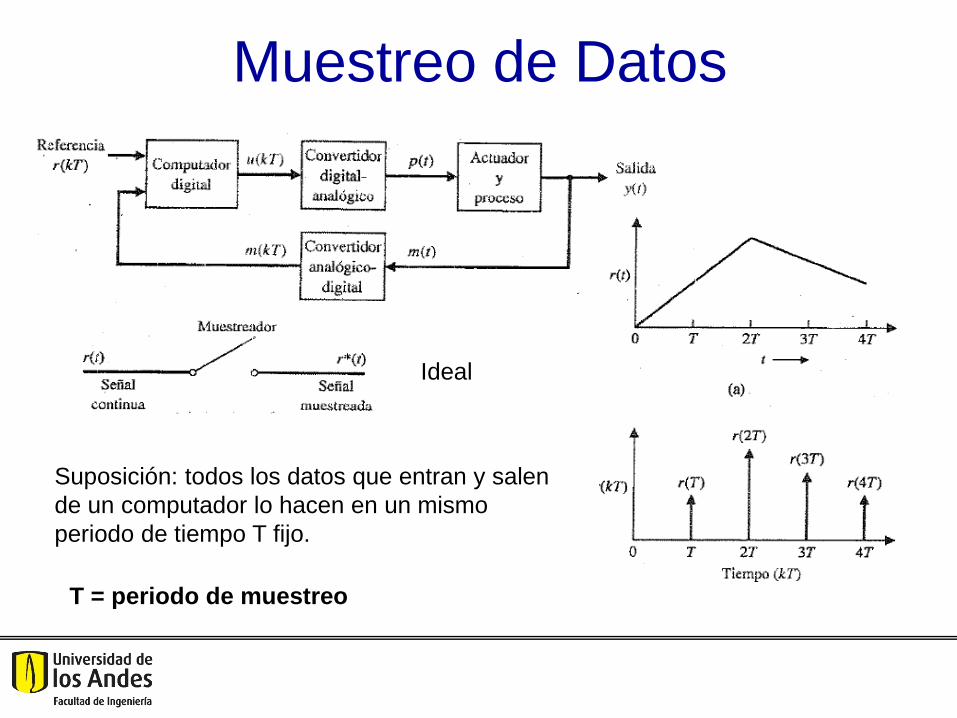
Muestreo de Datos
Suposición: todos los datos que entran y salen
de un computador lo hacen en un mismo
periodo de tiempo T fijo.
T = periodo de muestreo
Ideal
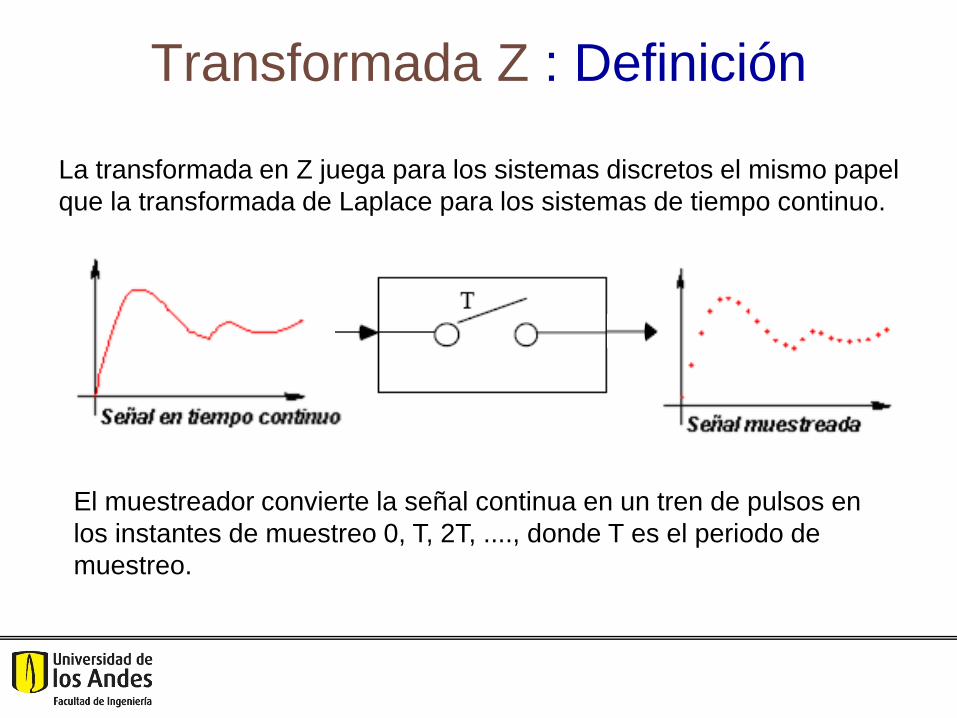
Transformada Z : Definición
La transformada en Z juega para los sistemas discretos el mismo papel
que la transformada de Laplace para los sistemas de tiempo continuo.
El muestreador convierte la señal continua en un tren de pulsos en
los instantes de muestreo 0, T, 2T, ...., donde T es el periodo de
muestreo.
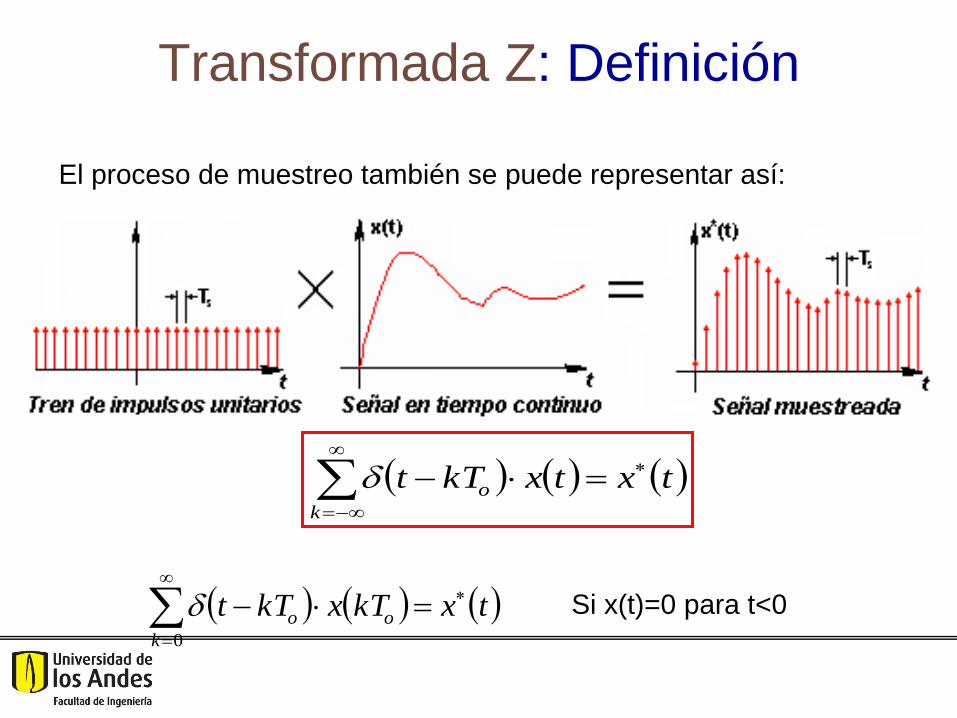
El proceso de muestreo también se puede representar así:
txtxkTtk
o
txkTxkTtk
oo
0
Si x(t)=0 para t<0
Transformada Z: Definición
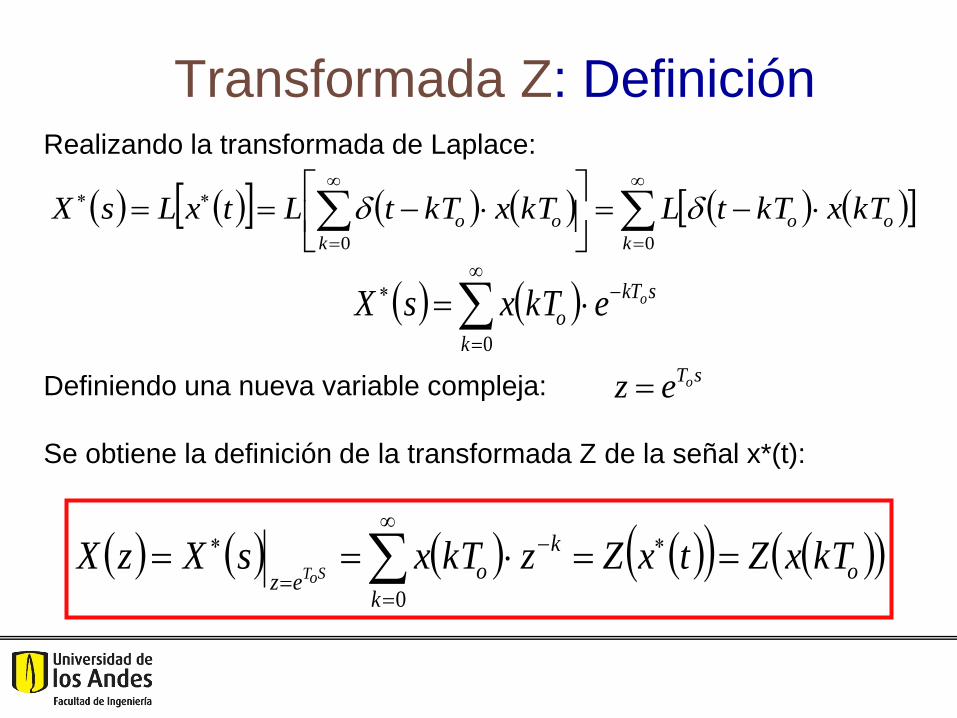
Realizando la transformada de Laplace:
o
k
k
oez
kTxZtxZzkTxsXzXSoT
0
00 k
oo
k
oo kTxkTtLkTxkTtLtxLsX
skT
k
ooekTxsX
0
Definiendo una nueva variable compleja: sToez
Se obtiene la definición de la transformada Z de la señal x*(t):
Transformada Z: Definición
Transformada Z: Cálculo
• Serie infinita. (Poco práctico)
• Método de la integral de convolución
• Utilizar tablas. (Caso práctico), eventualmente con
descomposición en fracciones parciales de X(s)
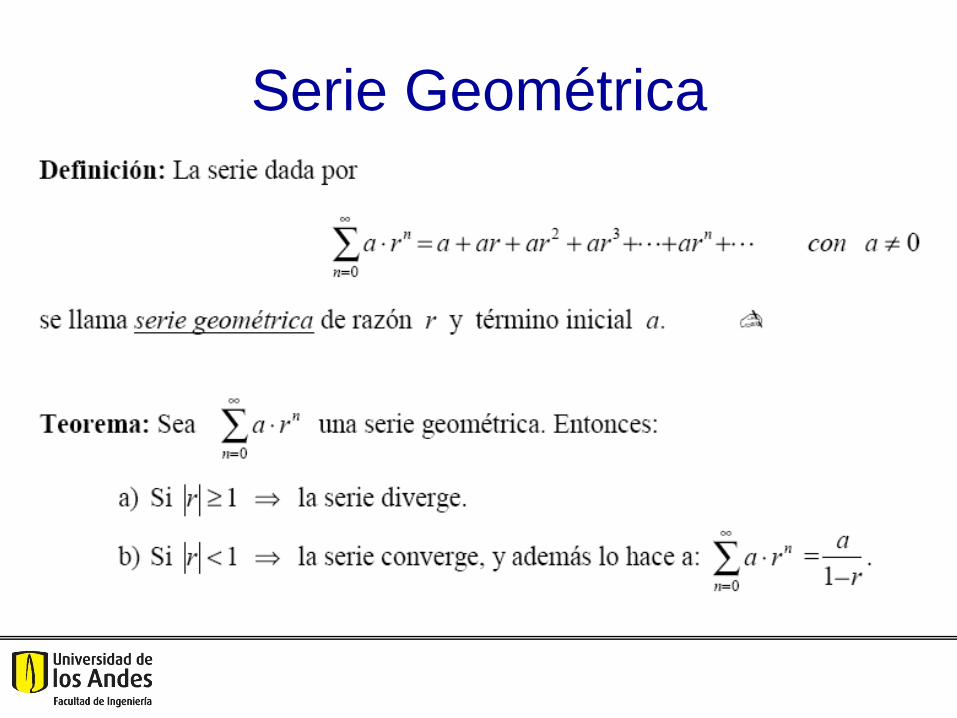
Serie Geométrica
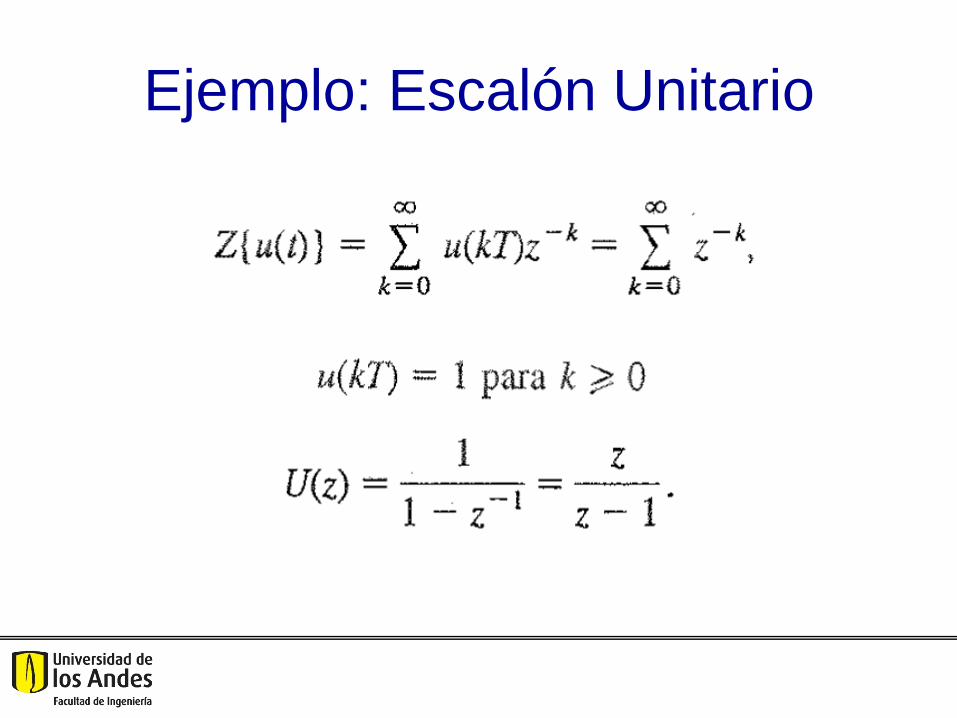
Ejemplo: Escalón Unitario
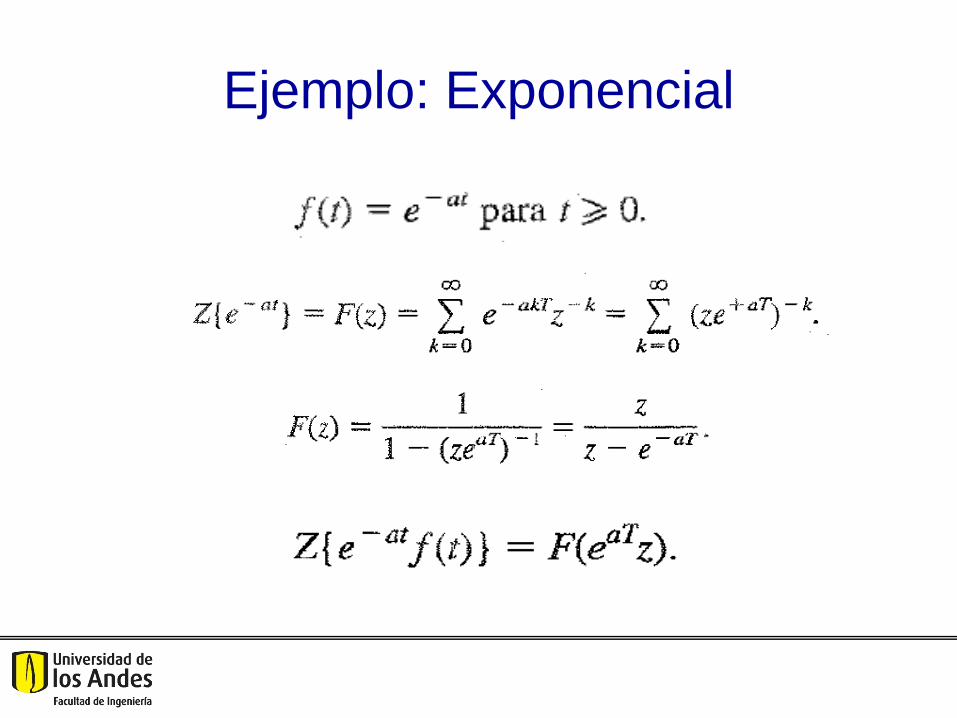
Ejemplo: Exponencial
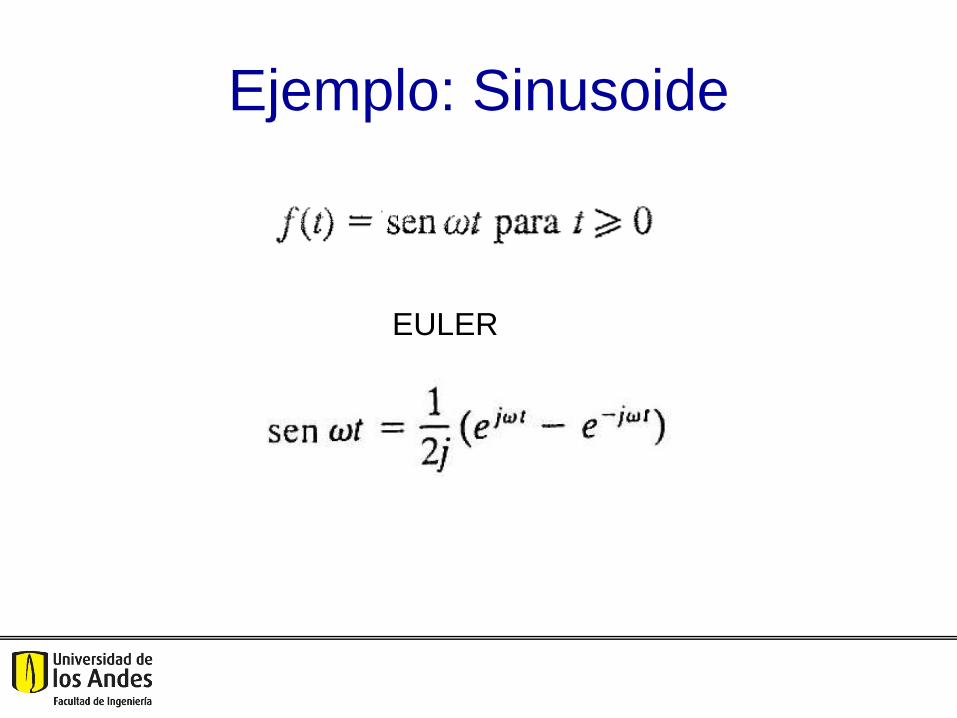
Ejemplo: Sinusoide
EULER
Transformada Z: Cálculo
Utilizar tablas
X(s) se puede expandir en fracciones parciales y utilizar
una tabla de equivalencias entre la transformada de
Laplace y la transformada Z
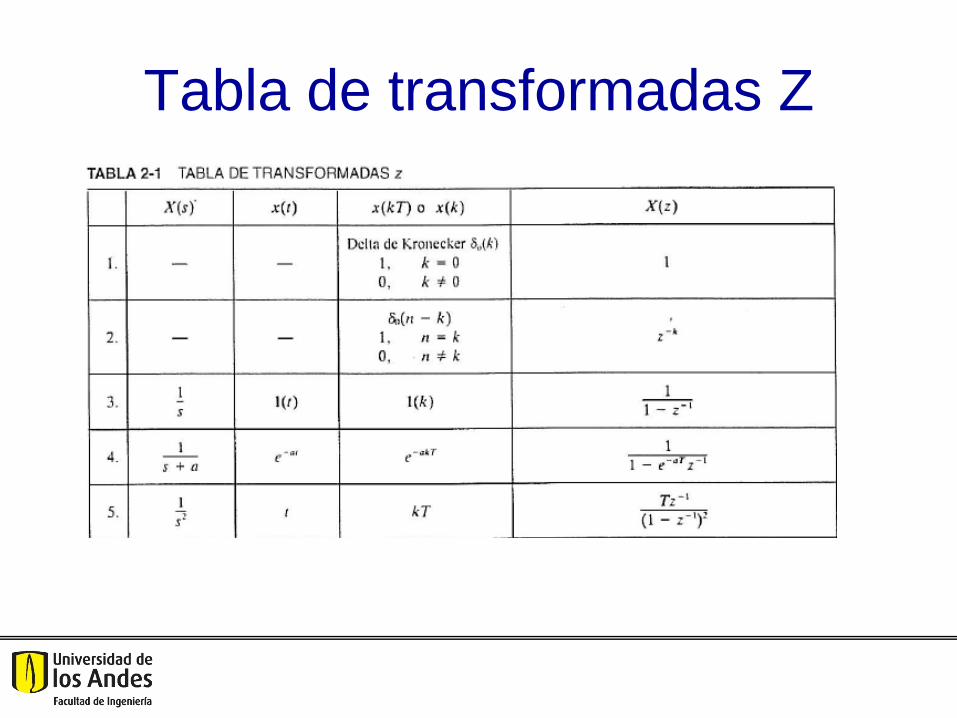
Tabla de transformadas Z
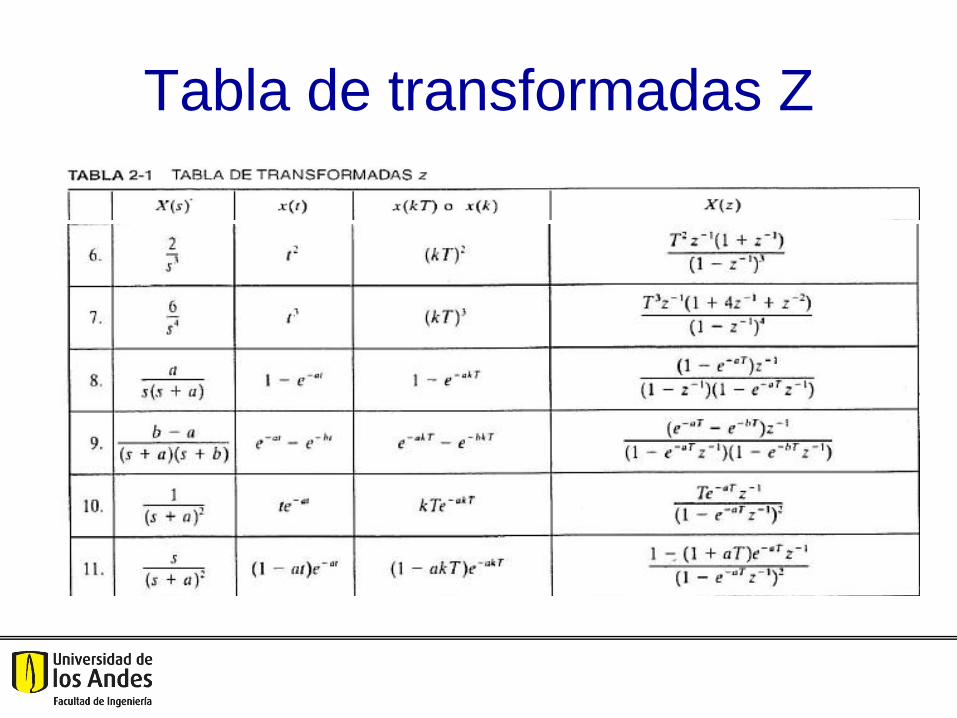
Tabla de transformadas Z
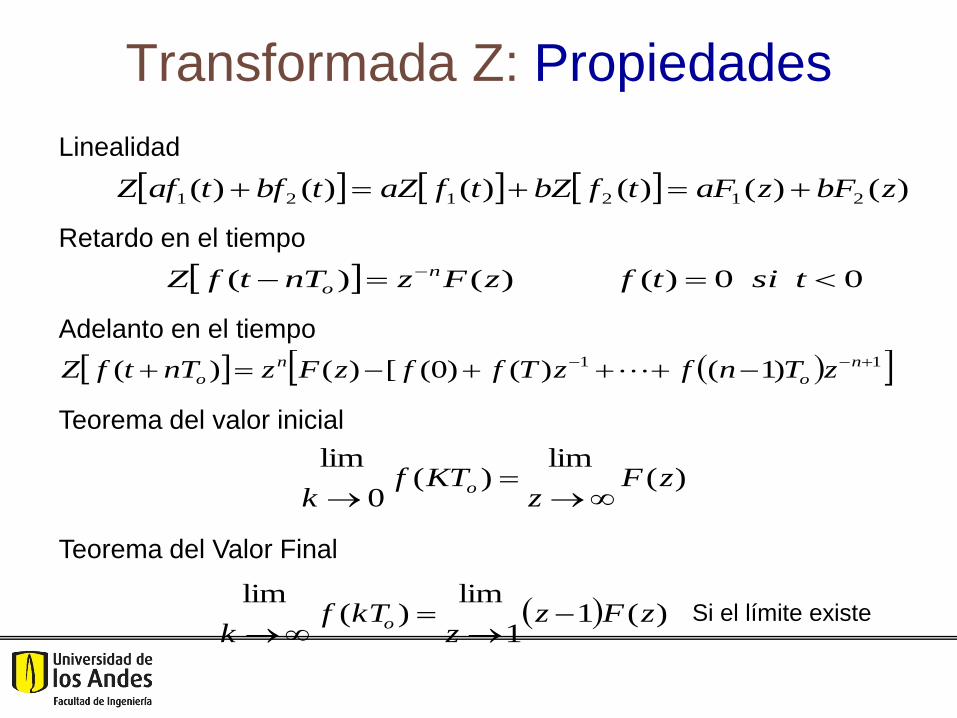
Transformada Z: Propiedades
Linealidad
Retardo en el tiempo
Adelanto en el tiempo
Teorema del valor inicial
Teorema del Valor Final
)()()()()()( 212121 zbFzaFtfbZtfaZtbftafZ
00)()()( tsitfzFznTtfZ n
o
)(11
lim)(
limzFz
zkTf
ko
Si el límite existe
11 )1()()0([)()( n
o
n
o zTnfzTffzFznTtfZ
)(lim
)(0
limzF
zKTf
ko
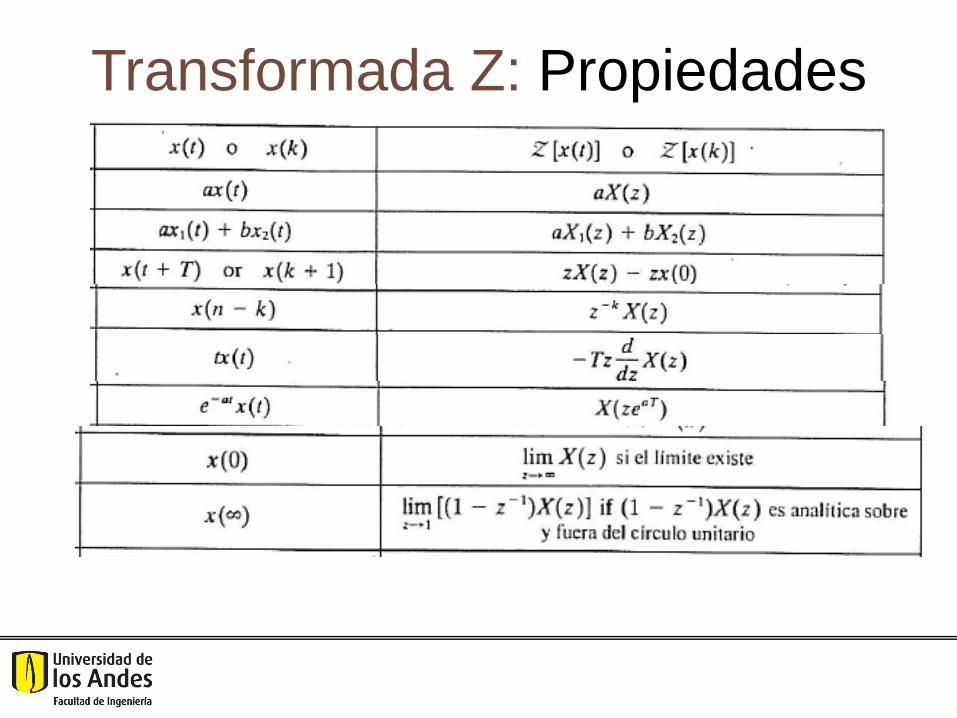
Transformada Z: Propiedades
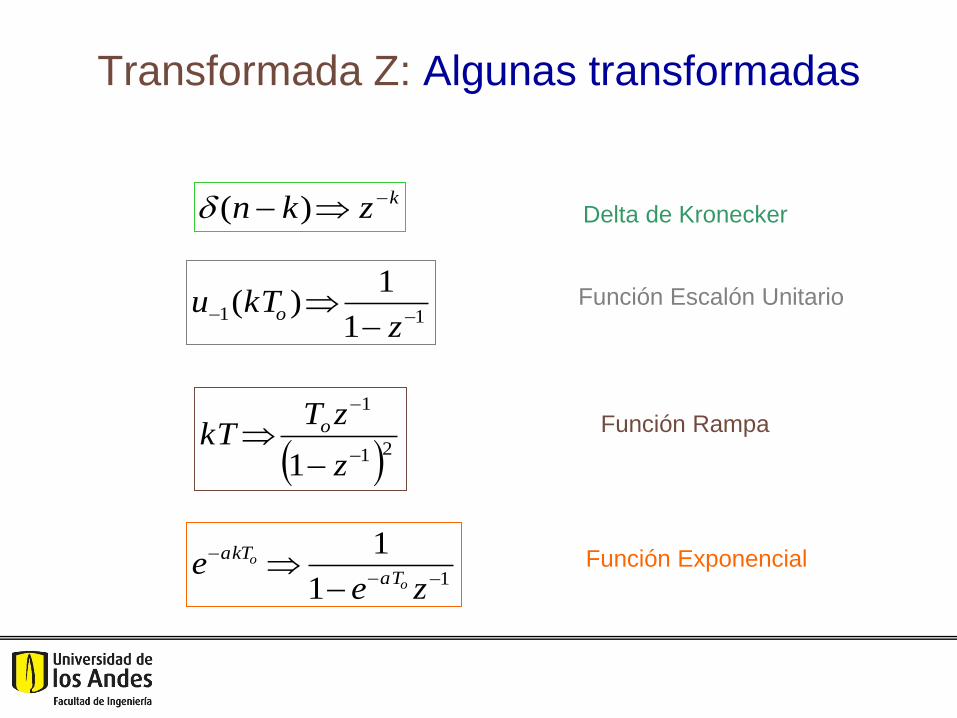
Transformada Z: Algunas transformadas
11
1
zee
o
o
aT
akT
kzkn )(
111
1)(
z
kTu o
21
1
1
z
zTkT o
Delta de Kronecker
Función Escalón Unitario
Función Rampa
Función Exponencial
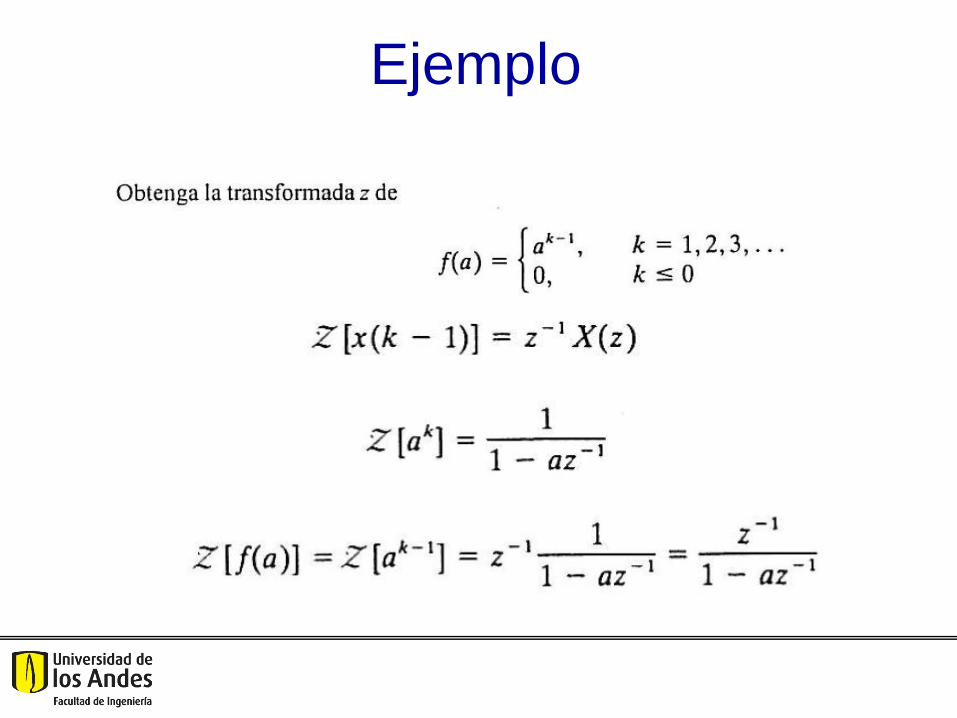
Ejemplo
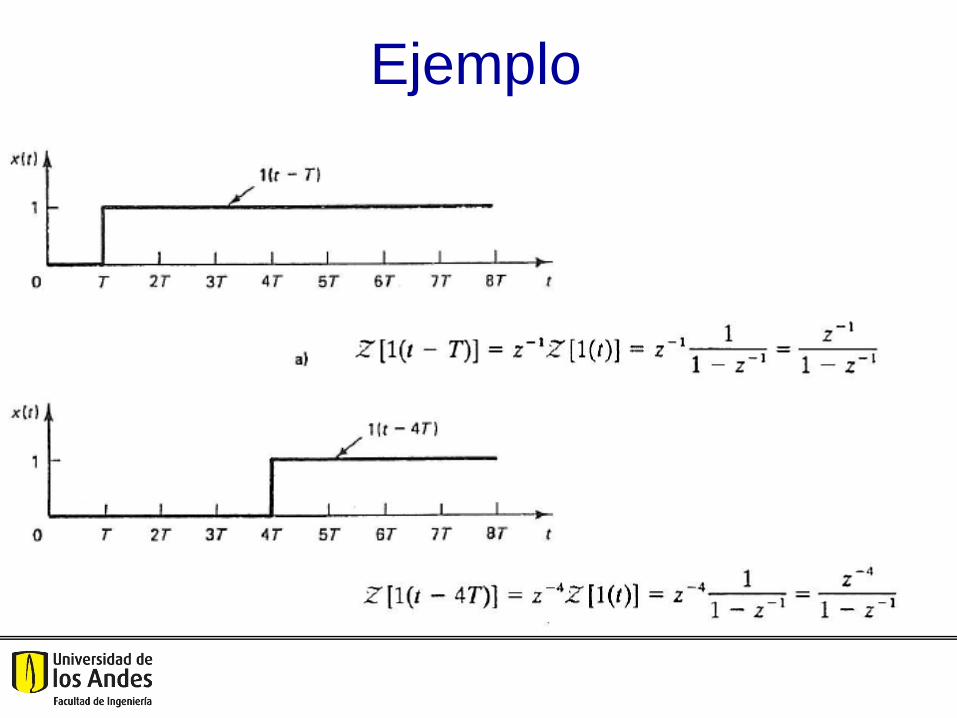
Ejemplo
Transformada Z: Transformada Inversa
Con la transformada Z inversa sólo se obtiene la secuencia de tiempo
en los instantes de muestreo.
Así, la transformada Z inversa de X(z) nos da una única secuencia x(k)
pero no nos da una única función x(t).
Solamente si estamos bajo las condiciones de aplicación del teorema
del muestreo de SHANNON podremos obtener la función por
interpolación sobre los muestreos.
El teorema de Shannon establece que la mínima frecuencia de
muestreo debe ser por lo menos dos veces la frecuencia máxima
contenida en la señal.
• Métodos Principales:
– Método de división directa.
– Método de expansión en fracciones parciales.
– Método de la integral de inversión.
Transformada Z: Transformada Inversa
Método de división directa
La transformada Z inversa se obtiene mediante la expansión de X(z).
Los valores de x(kTo) se obtienen por inspección
Se usa cuando: Es difícil obtener la transformada z inversa.
Si se desea encontrar algunos de los primeros términos de x(kTo).
0
)()(k
k
o zkTxzX
...)(.....)2()1()0()( 21 kzkxzxzxxzX
Transformada Z: Transformada Inversa
Método de expansión en fracciones parciales
Se debe desarrollar en fracciones parciales
y con una tabla de transformadas se obtiene la transformada Z
inversa como la suma de las transformadas Z inversa de las
fracciones parciales.
El desarrollo en fracciones parciales es como ya se ha visto.
z
zX )(
Transformada Z: Transformada Inversa
Ejemplo
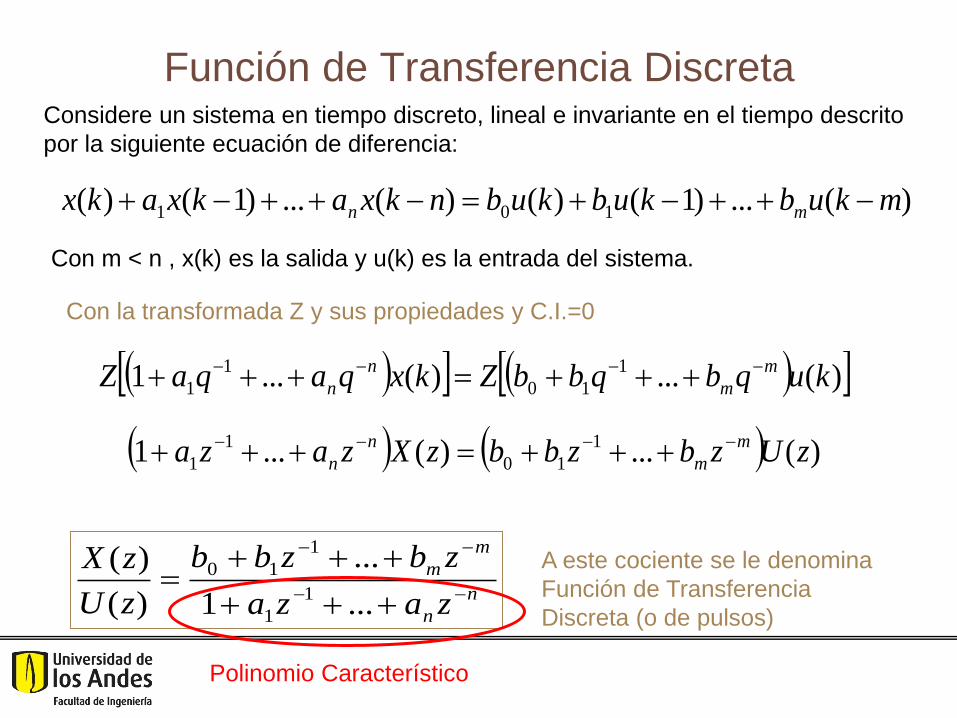
Función de Transferencia Discreta Considere un sistema en tiempo discreto, lineal e invariante en el tiempo descrito
por la siguiente ecuación de diferencia:
n
n
m
m
zaza
zbzbb
zU
zX
...1
...
)(
)(1
1
1
10
Con la transformada Z y sus propiedades y C.I.=0
A este cociente se le denomina
Función de Transferencia
Discreta (o de pulsos)
Polinomio Característico
)(...)1()()(...)1()( 101 mkubkubkubnkxakxakx mn
Con m < n , x(k) es la salida y u(k) es la entrada del sistema.
)(...)(...1 1
10
1
1 kuqbqbbZkxqaqaZ m
m
n
n
)(...)(...1 1
10
1
1 zUzbzbbzXzaza m
m
n
n
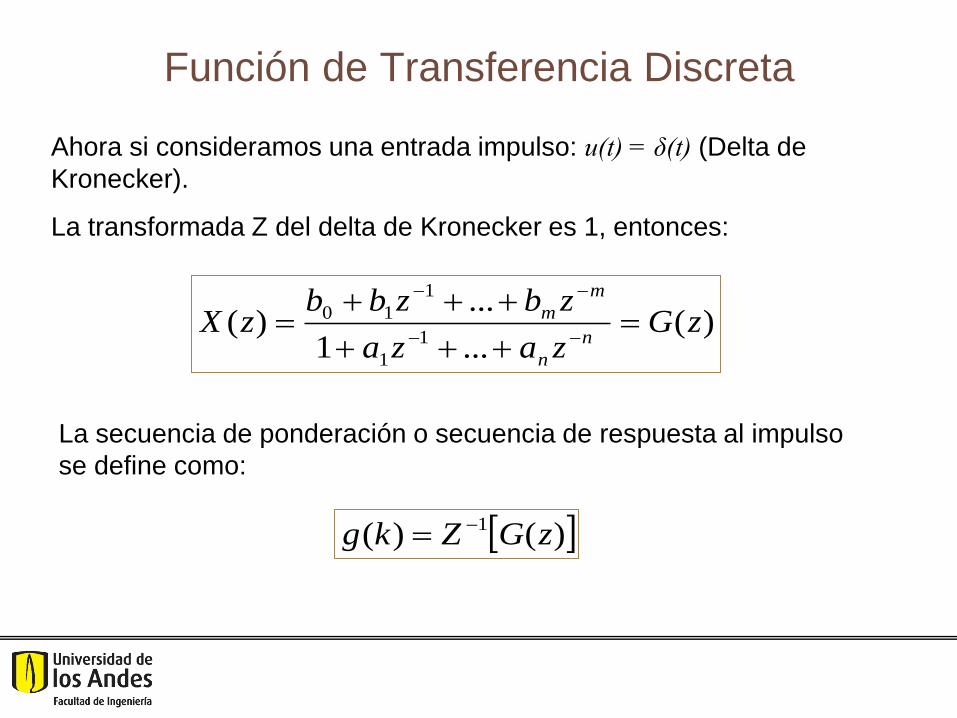
Función de Transferencia Discreta
Ahora si consideramos una entrada impulso: u(t) = δ(t) (Delta de
Kronecker).
La transformada Z del delta de Kronecker es 1, entonces:
)(...1
...)(
1
1
1
10 zGzaza
zbzbbzX
n
n
m
m
La secuencia de ponderación o secuencia de respuesta al impulso
se define como:
)()( 1 zGZkg
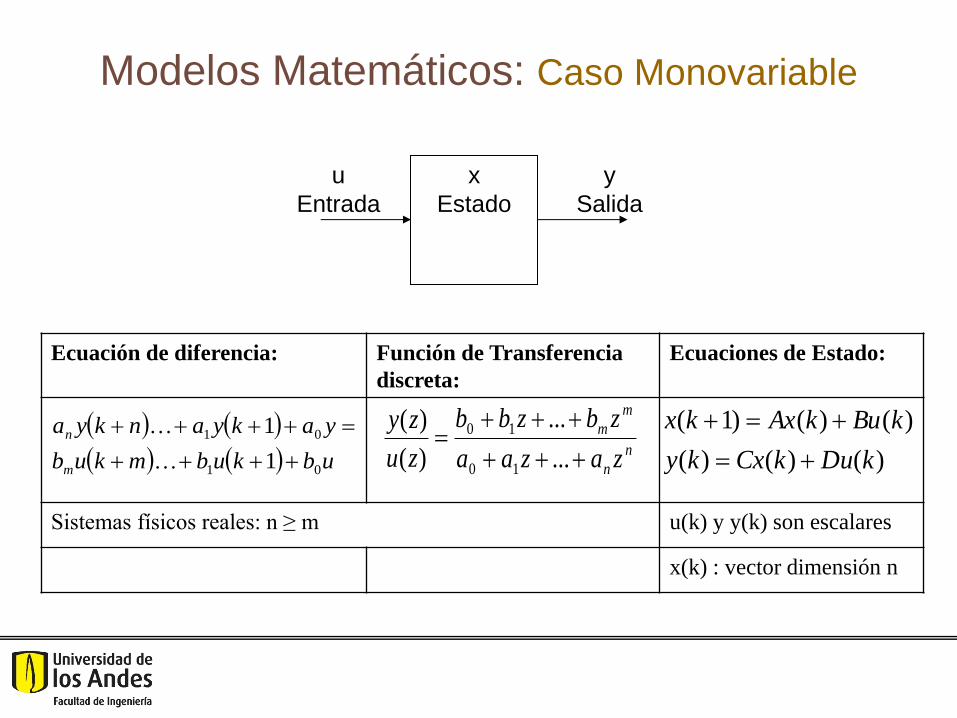
Modelos Matemáticos: Caso Monovariable
x
Estado
y
Salida
u
Entrada
ubkubmkub
yakyankya
m
n
01
01
1
1
n
n
m
m
zazaa
zbzbb
zu
zy
...
...
)(
)(
10
10
)()()(
)()()1(
kDukCxky
kBukAxkx
Ecuación de diferencia: Función de Transferencia
discreta:
Ecuaciones de Estado:
Sistemas físicos reales: n ≥ m u(k) y y(k) son escalares
x(k) : vector dimensión n
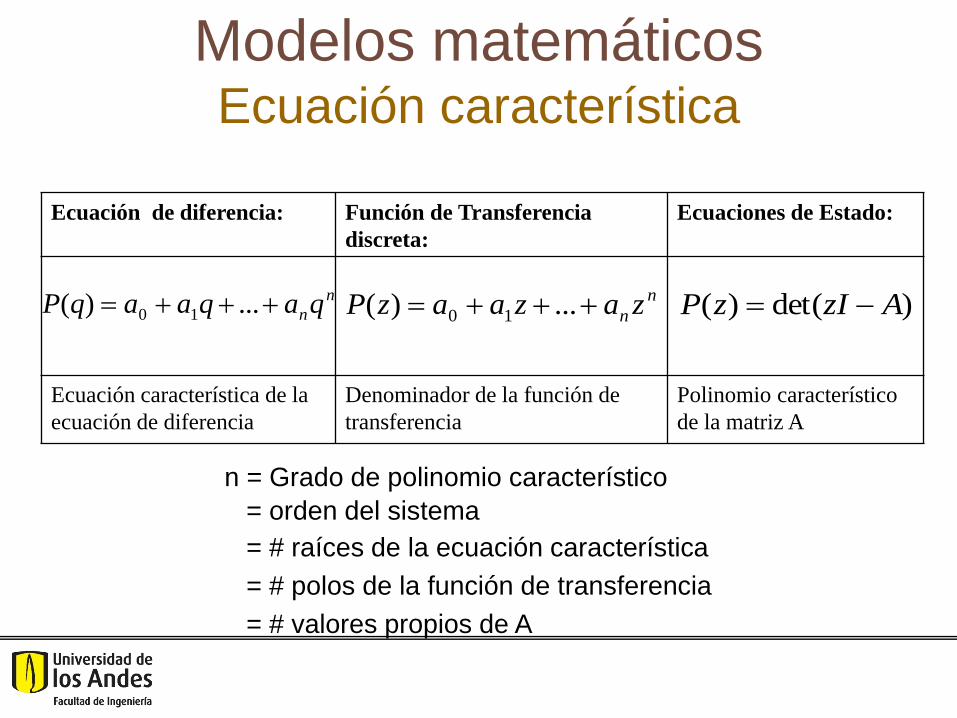
Modelos matemáticos Ecuación característica
n
nqaqaaqP ...)( 10
n
n zazaazP ...)( 10 )det()( AzIzP
Ecuación de diferencia: Función de Transferencia
discreta:
Ecuaciones de Estado:
Ecuación característica de la
ecuación de diferencia
Denominador de la función de
transferencia
Polinomio característico
de la matriz A
n = Grado de polinomio característico
= orden del sistema
= # raíces de la ecuación característica
= # polos de la función de transferencia
= # valores propios de A
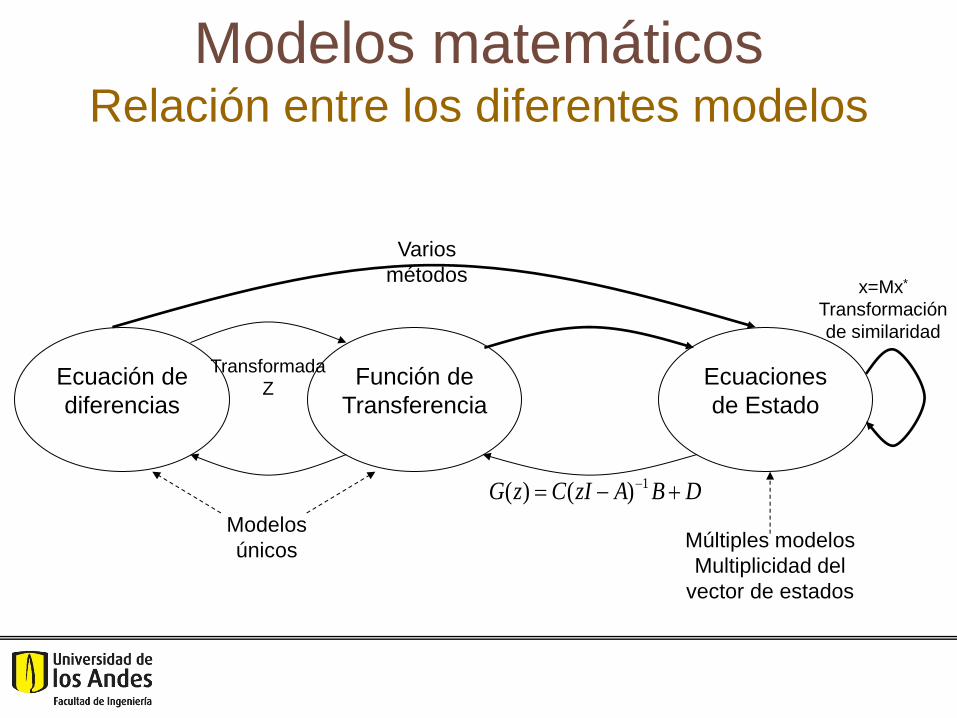
Modelos matemáticos Relación entre los diferentes modelos
Ecuación de
diferencias
Función de
Transferencia
Ecuaciones
de Estado
Varios
métodos
Modelos
únicos
x=Mx*
Transformación
de similaridad
Múltiples modelos
Multiplicidad del
vector de estados
Transformada
Z
DBAzICzG 1)()(
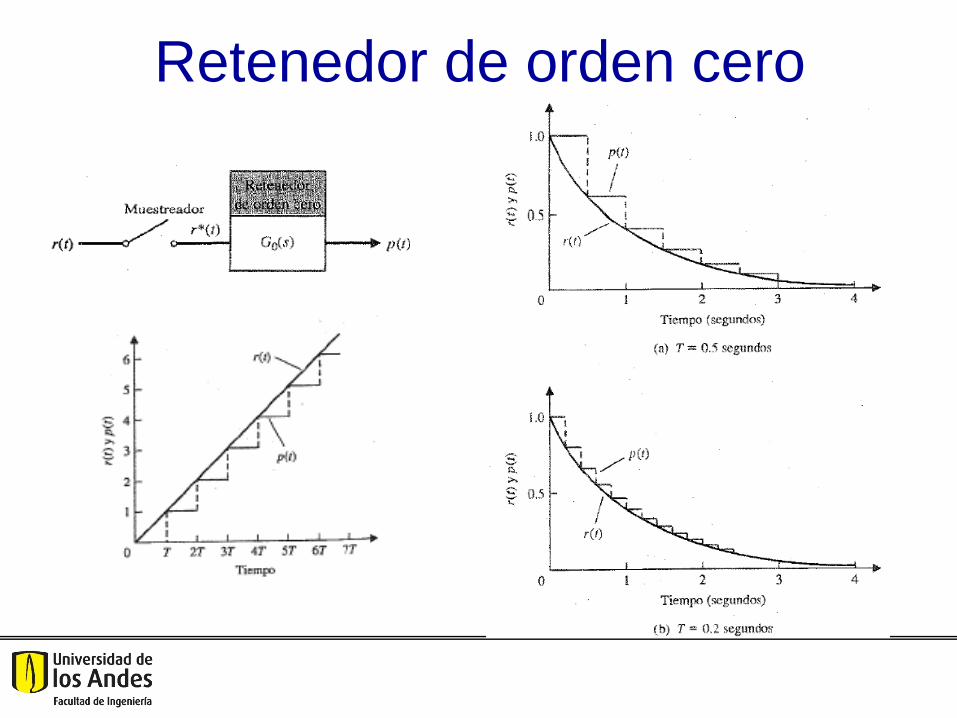
Retenedor de orden cero
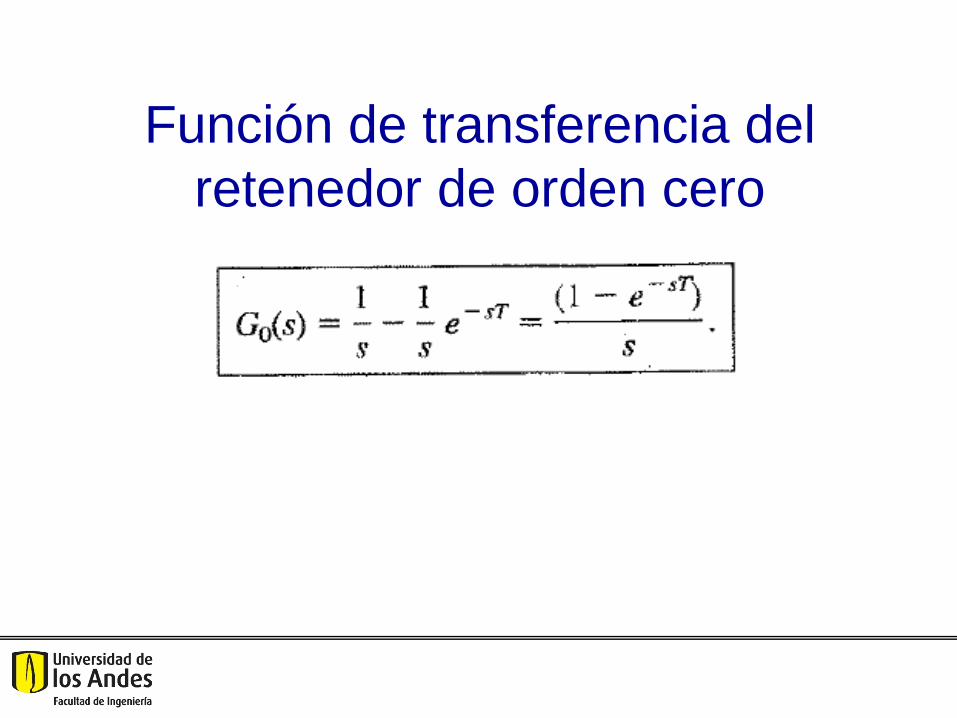
Función de transferencia del
retenedor de orden cero
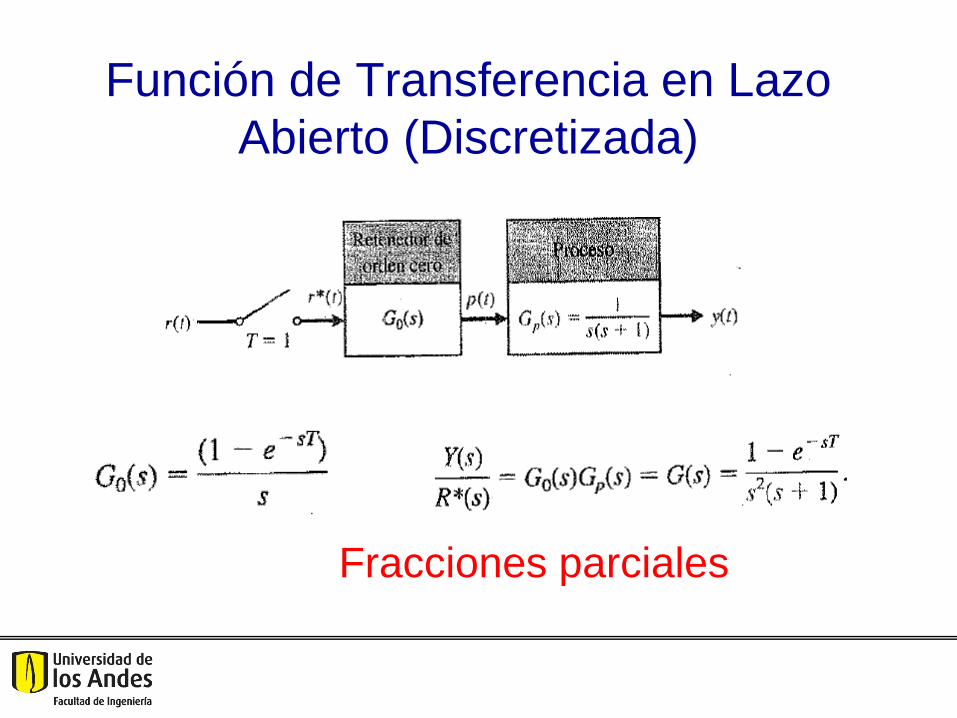
Función de Transferencia en Lazo
Abierto (Discretizada)
Fracciones parciales
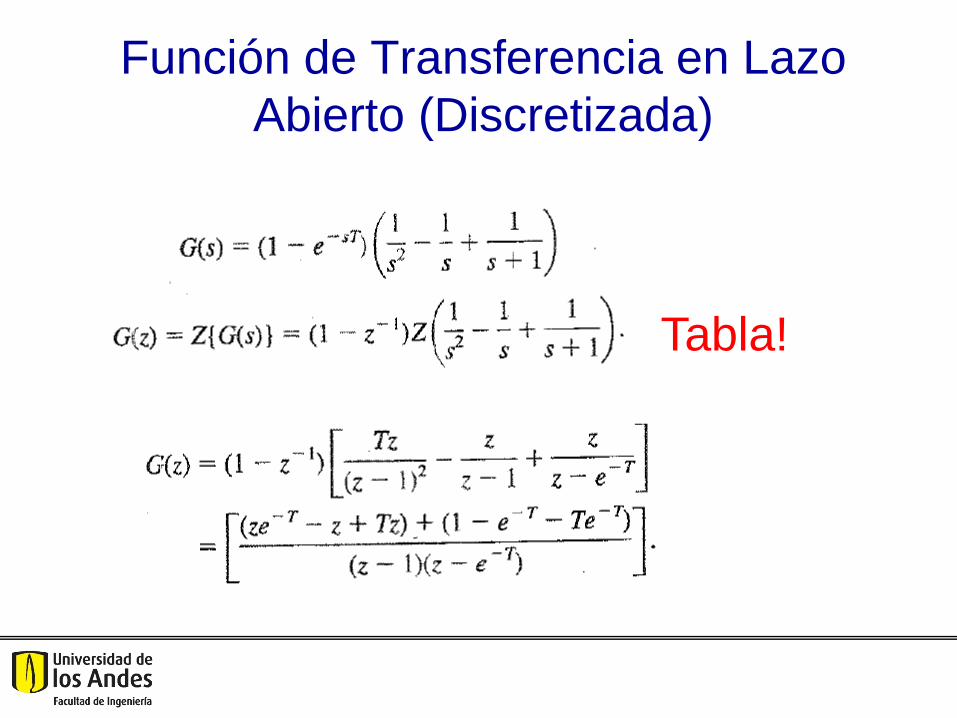
Función de Transferencia en Lazo
Abierto (Discretizada)
Tabla!
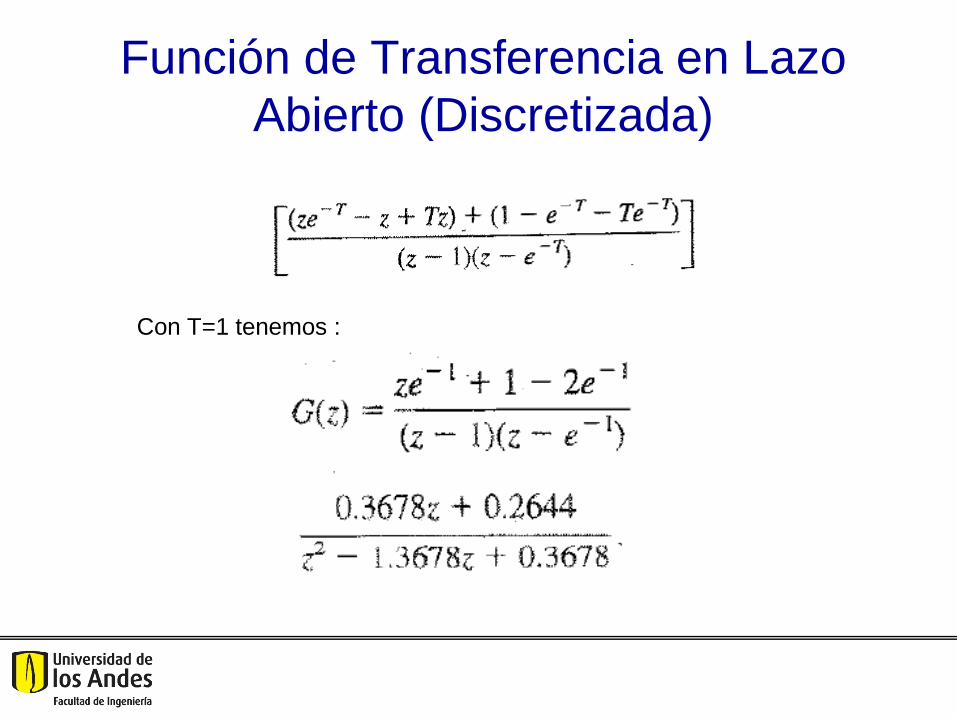
Función de Transferencia en Lazo
Abierto (Discretizada)
Con T=1 tenemos :
Ejemplo
Características de los Sistemas
de Control Retroalimentado
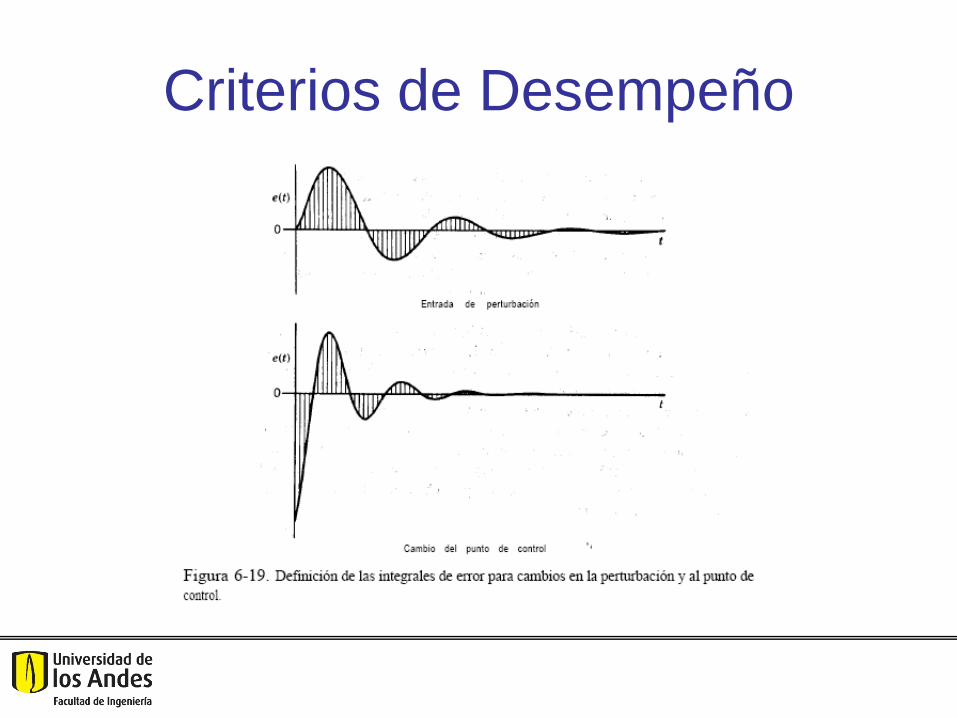
Introducción
• Se presenta el rol de las señales de error para
caracterizar el desempeño de los sistemas de control
retroalimentado.
• La señal de error se utiliza para controlar un proceso
por medio de una retroalimentación negativa.
• IDEA: Minimizar la señal de error, y discutir cómo
la sensitividad al cambio de parámetros afecta el
desempeño del sistema.
• El sistema debe ser robusto a cambios en los
parámetros, independientemente de qué señal afecte
al sistema.
Introducción, cont.
• Un sistema de control se puede ver como la
interconexión de varios componentes que
conforman un sistema que provee una determinada
respuesta.
• Como esta respuesta es conocida, se puede
generar una señal proporcional al error entre lo
actual y lo deseado, la cual se utiliza en una
secuencia de malla cerrada conocida como sistema
retroalimentado.
• Ejemplos en la naturaleza: el ritmo cardíaco
humano.
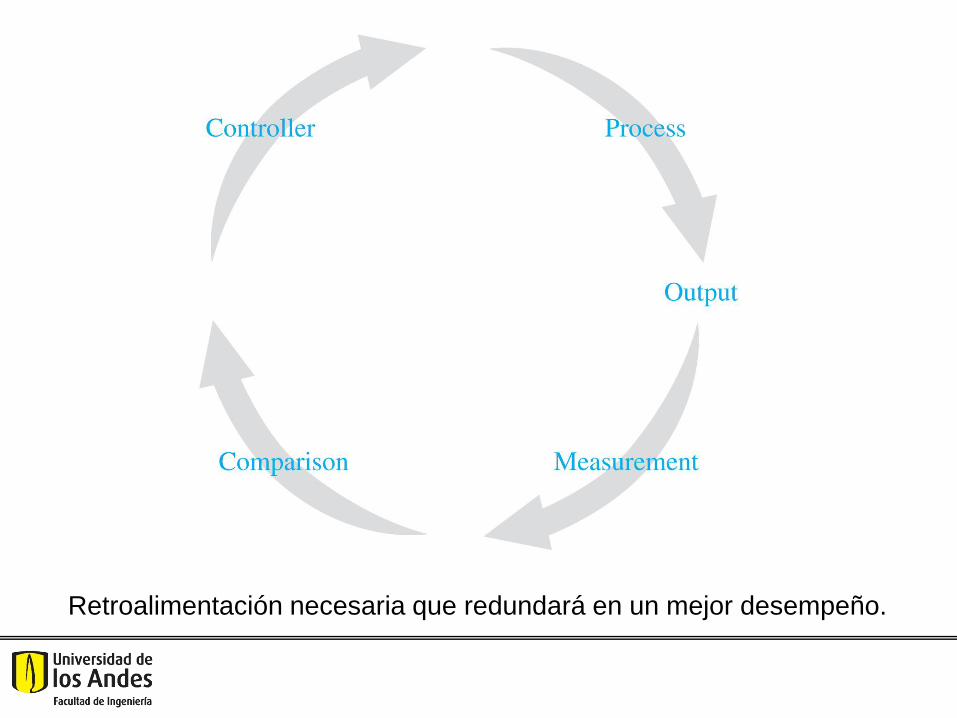
Retroalimentación necesaria que redundará en un mejor desempeño.
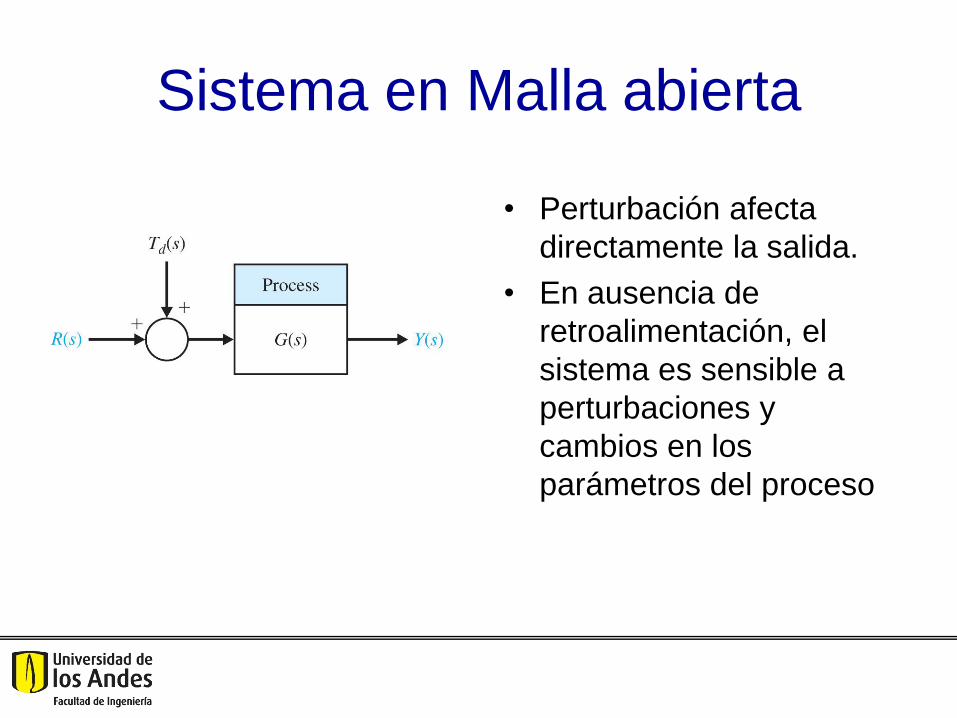
Sistema en Malla abierta
• Perturbación afecta
directamente la salida.
• En ausencia de
retroalimentación, el
sistema es sensible a
perturbaciones y
cambios en los
parámetros del proceso
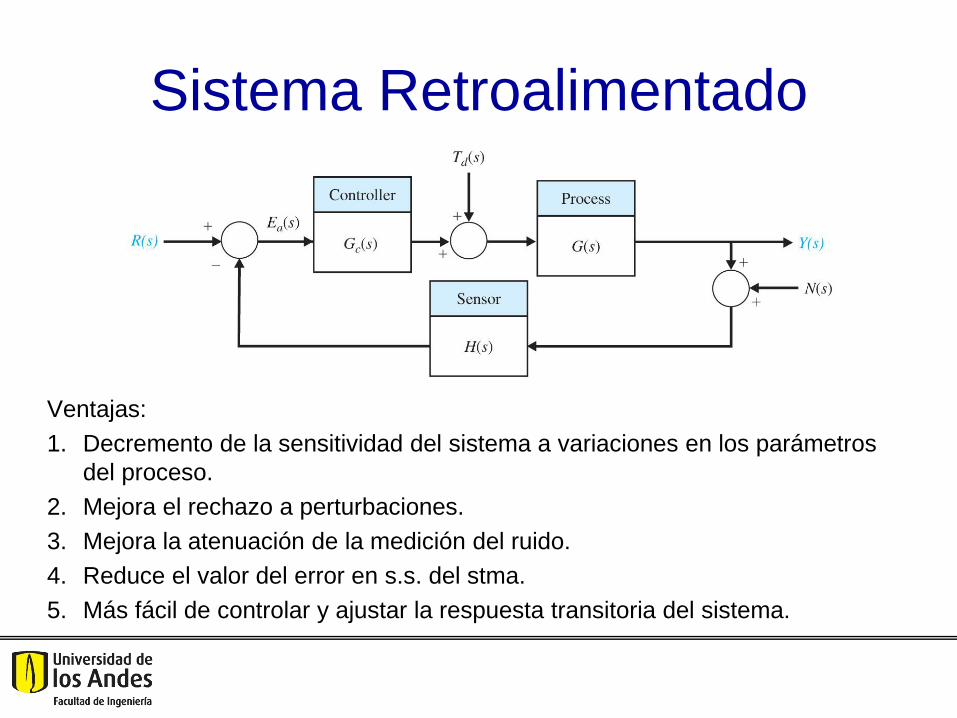
Sistema Retroalimentado
Ventajas:
1. Decremento de la sensitividad del sistema a variaciones en los parámetros
del proceso.
2. Mejora el rechazo a perturbaciones.
3. Mejora la atenuación de la medición del ruido.
4. Reduce el valor del error en s.s. del stma.
5. Más fácil de controlar y ajustar la respuesta transitoria del sistema.
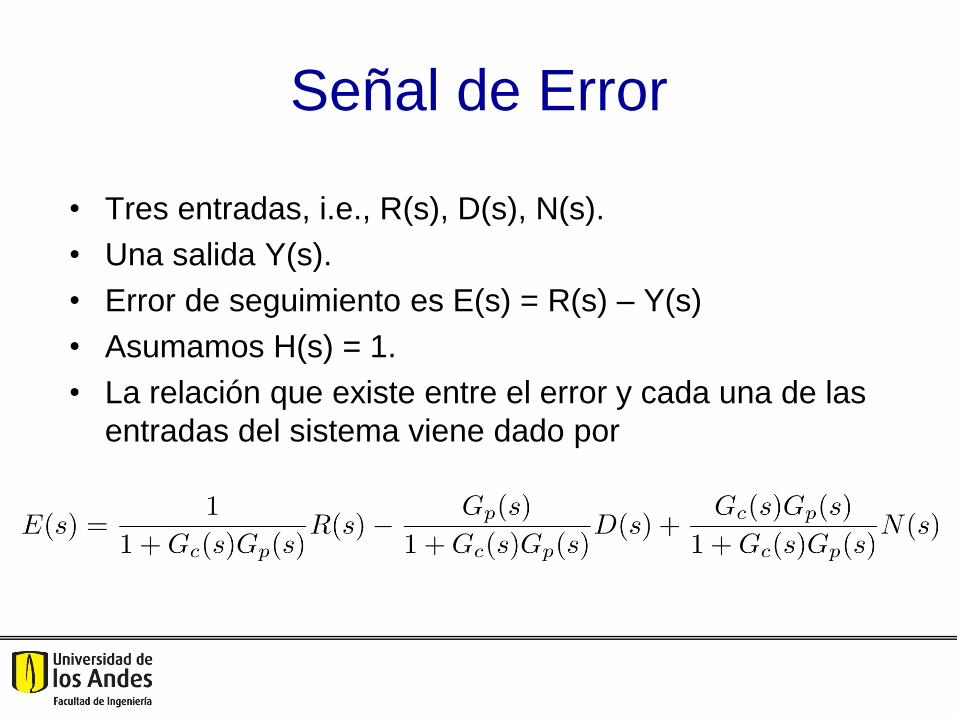
Señal de Error
• Tres entradas, i.e., R(s), D(s), N(s).
• Una salida Y(s).
• Error de seguimiento es E(s) = R(s) – Y(s)
• Asumamos H(s) = 1.
• La relación que existe entre el error y cada una de las
entradas del sistema viene dado por
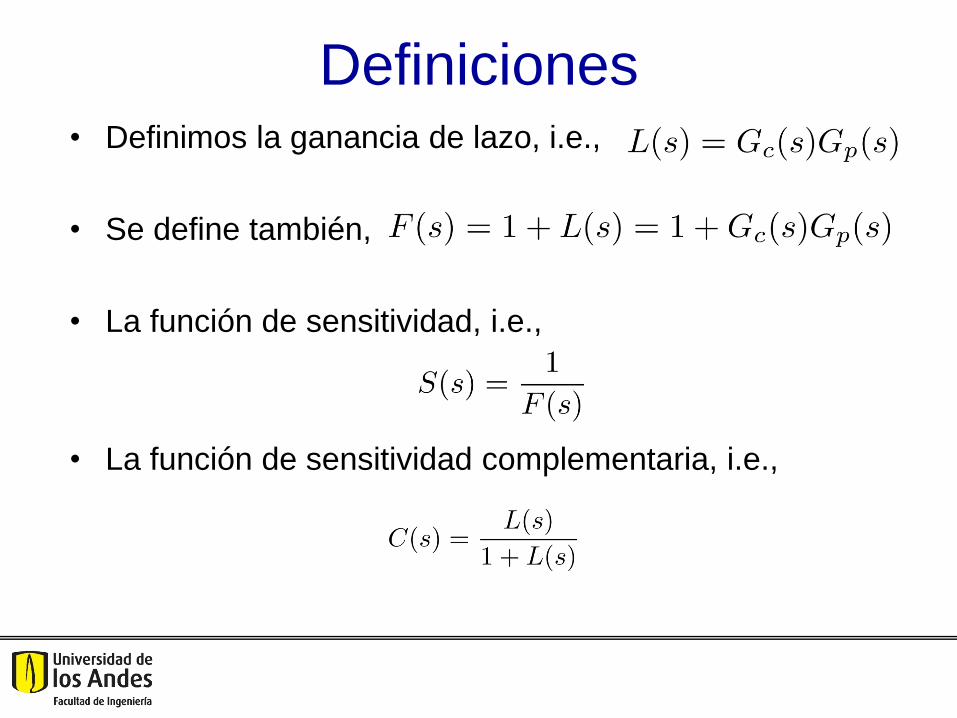
Definiciones • Definimos la ganancia de lazo, i.e.,
• Se define también,
• La función de sensitividad, i.e.,
• La función de sensitividad complementaria, i.e.,
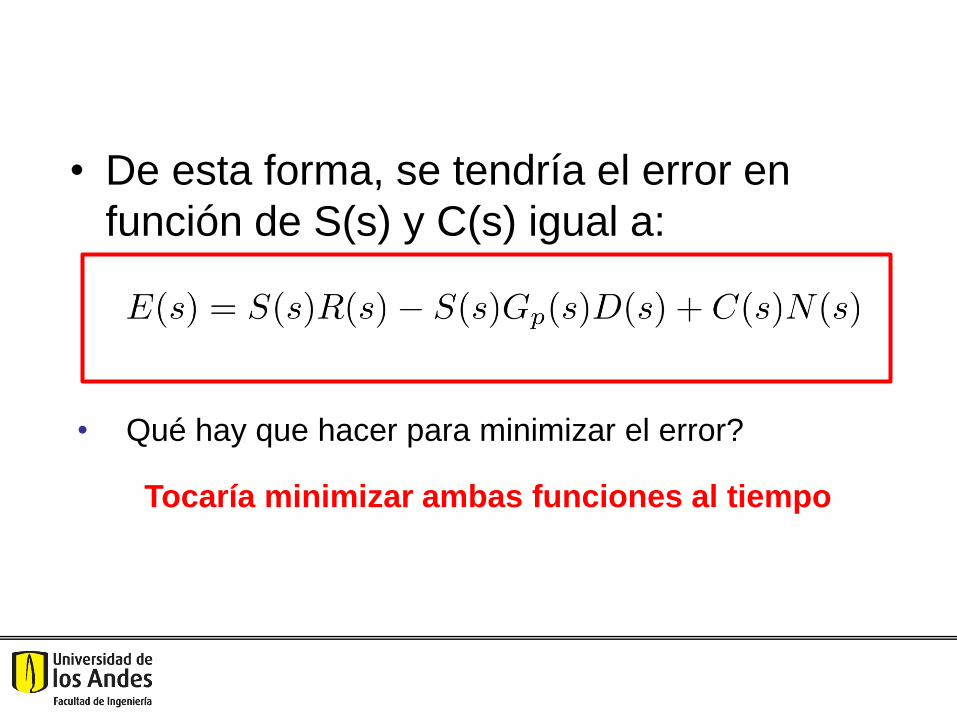
• De esta forma, se tendría el error en
función de S(s) y C(s) igual a:
• Qué hay que hacer para minimizar el error?
Tocaría minimizar ambas funciones al tiempo
• Qué habría que hacer con respecto a la perturbación
D(s)?
L(s) grande en el rango de frecuencias de D(s)
• Y con respecto al ruido N(s)?
L(s) pequeño en el rango de frecuencias de N(s)
Sensitividad a Cambio de
Parámetros • Un proceso Gp(s) está sujeto a una gran cantidad de
variaciones en sus parámetros que afectan el proceso
de control.
• En un sistema de malla abierta esta redundaría en
bastantes errores en la salida, mientras que en un
sistema de malla cerrada esto podría reducirse gracias
al sensado de la salida en la entrada. Para ello, la
sensitivdad es de vital importancia.
Sensit. a Cambio de Parámetros, cont.
• Por ejemplo, si GcGp >> 1 para toda frecuencia, la
salida sería Y(s) ~=R(s) cuando D(s) = N(s) = 0. Esto
implicaría que la salida y la entrada serían similares,
pero GcGp >> 1 causaría oscilaciones y se podría llegar
a la inestabilidad del sistema.
• El hecho de que aumente la magnitud de la ganancia de
lazo, disminuye el efecto de Gp(s) en la salida, es de
mucha utilidad. Por lo tanto, la primera ventaja de un
sistema retroalimentado es que el efecto en las
variaciones de los parámetros del proceso Gp(s) se ve
reducida.
PRECISIÓN
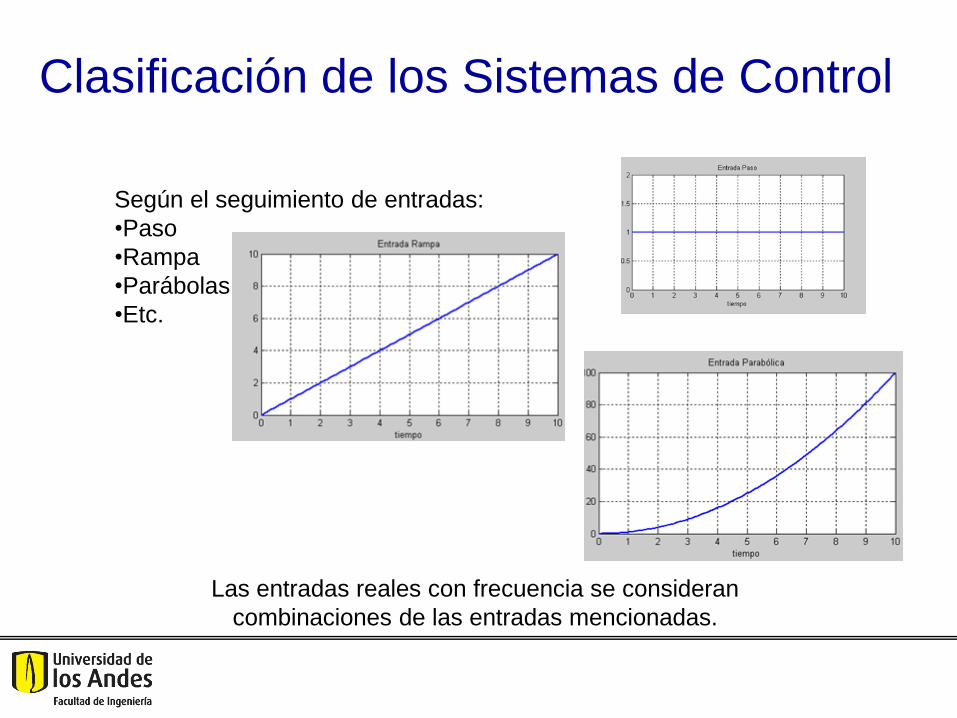
Clasificación de los Sistemas de Control
Según el seguimiento de entradas:
•Paso
•Rampa
•Parábolas
•Etc.
Las entradas reales con frecuencia se consideran
combinaciones de las entradas mencionadas.
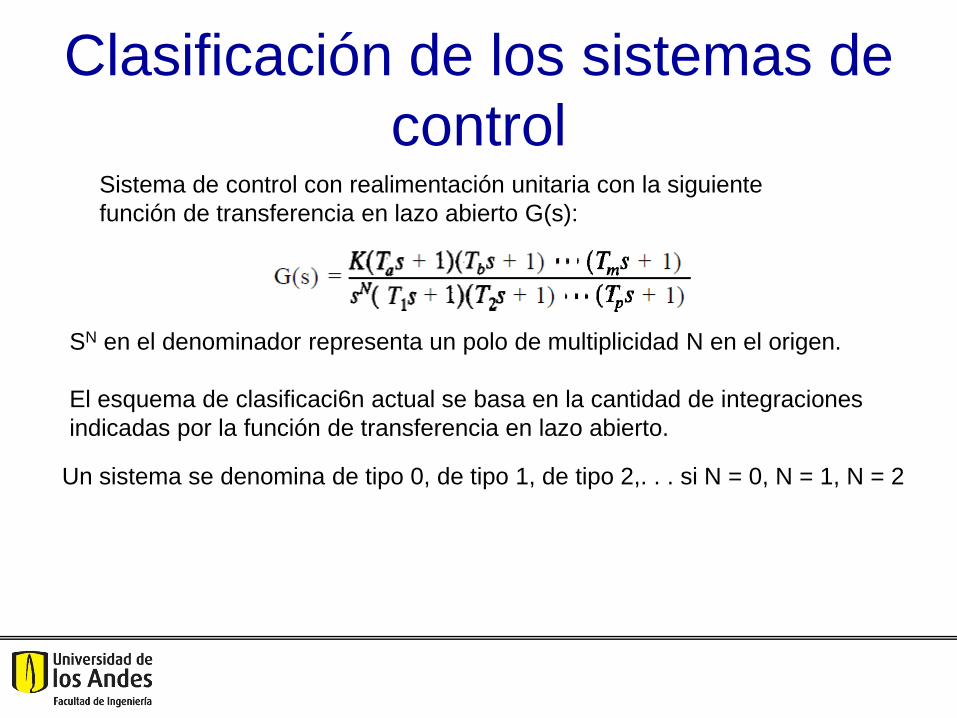
Clasificación de los sistemas de
control Sistema de control con realimentación unitaria con la siguiente
función de transferencia en lazo abierto G(s):
SN en el denominador representa un polo de multiplicidad N en el origen.
El esquema de clasificaci6n actual se basa en la cantidad de integraciones
indicadas por la función de transferencia en lazo abierto.
Un sistema se denomina de tipo 0, de tipo 1, de tipo 2,. . . si N = 0, N = 1, N = 2
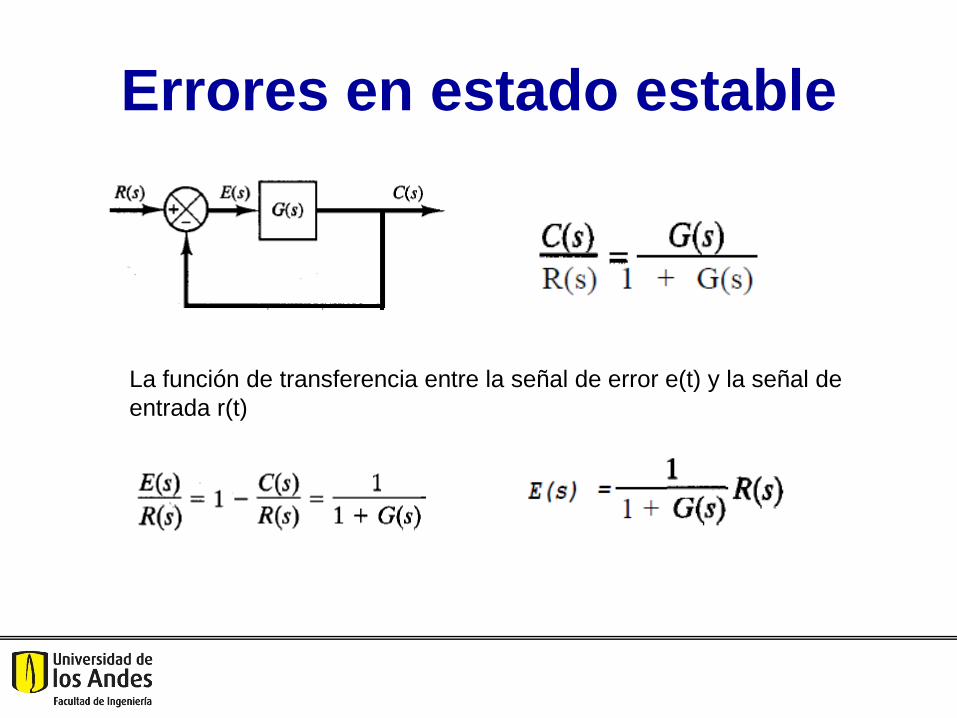
Errores en estado estable
La función de transferencia entre la señal de error e(t) y la señal de
entrada r(t)
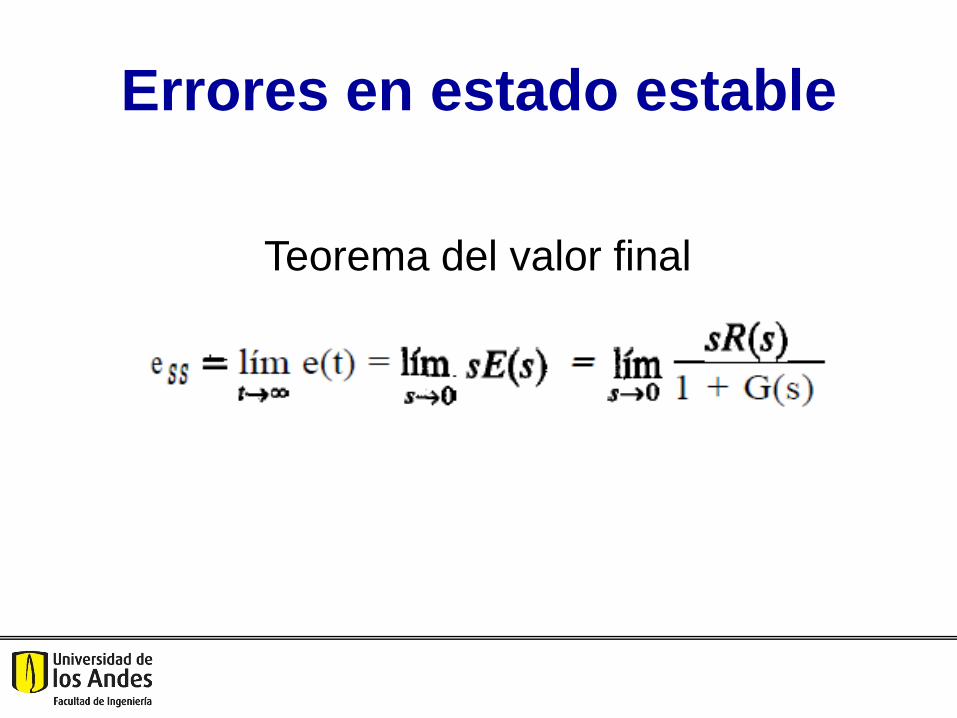
Errores en estado estable
Teorema del valor final
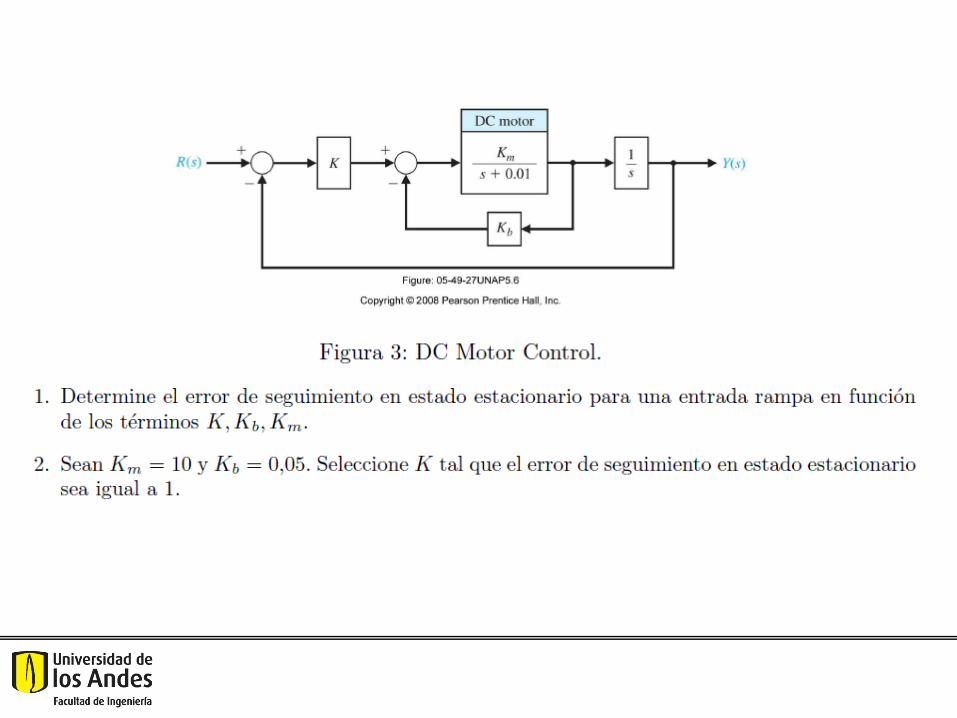
Figuras de mérito de los
sistemas de control
Entre más altas son las constantes, más
pequeño es el error en estado estable.
• Posición (e.g Temperatura de salida) Kp
• Velocidad (e.g Razón de cambio de la
temperatura de salida) Kv
• Aceleración. Ka
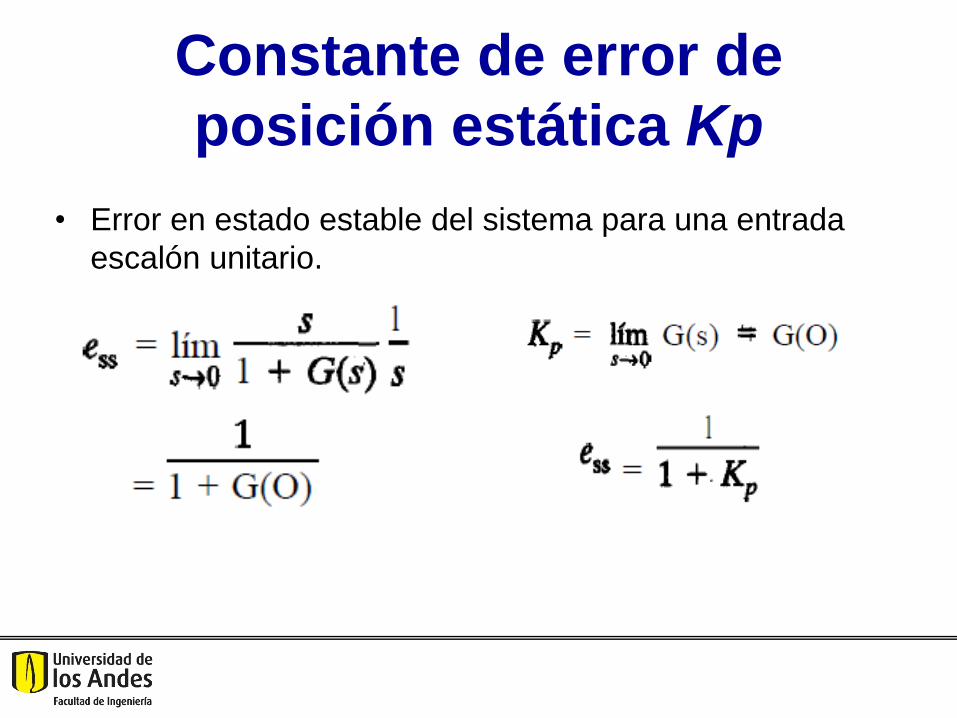
Constante de error de
posición estática Kp
• Error en estado estable del sistema para una entrada
escalón unitario.
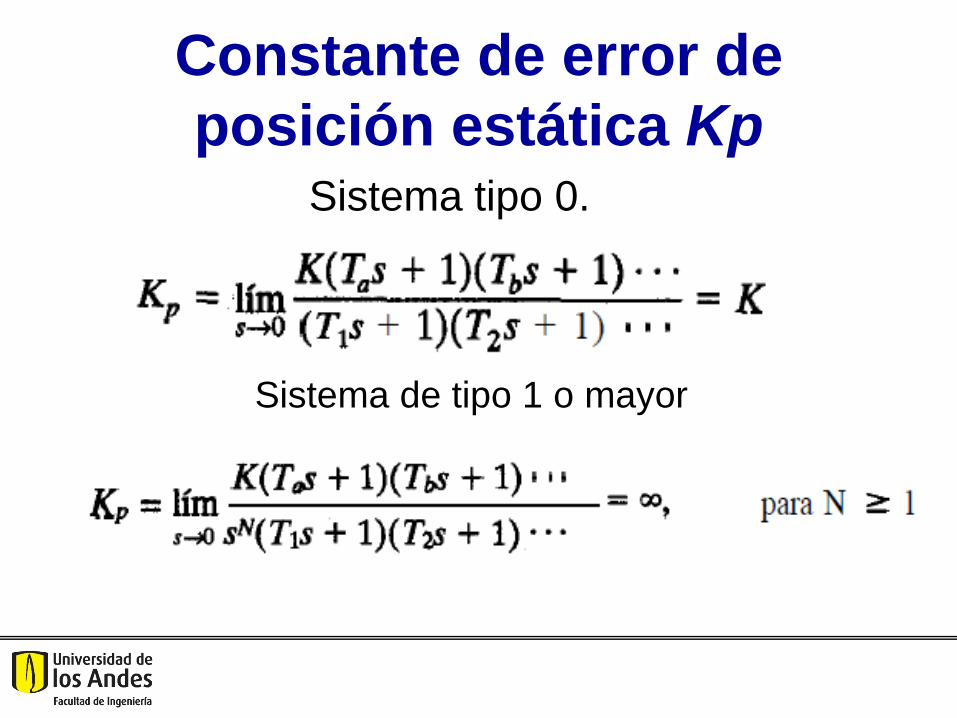
Constante de error de
posición estática Kp Sistema tipo 0.
Sistema de tipo 1 o mayor
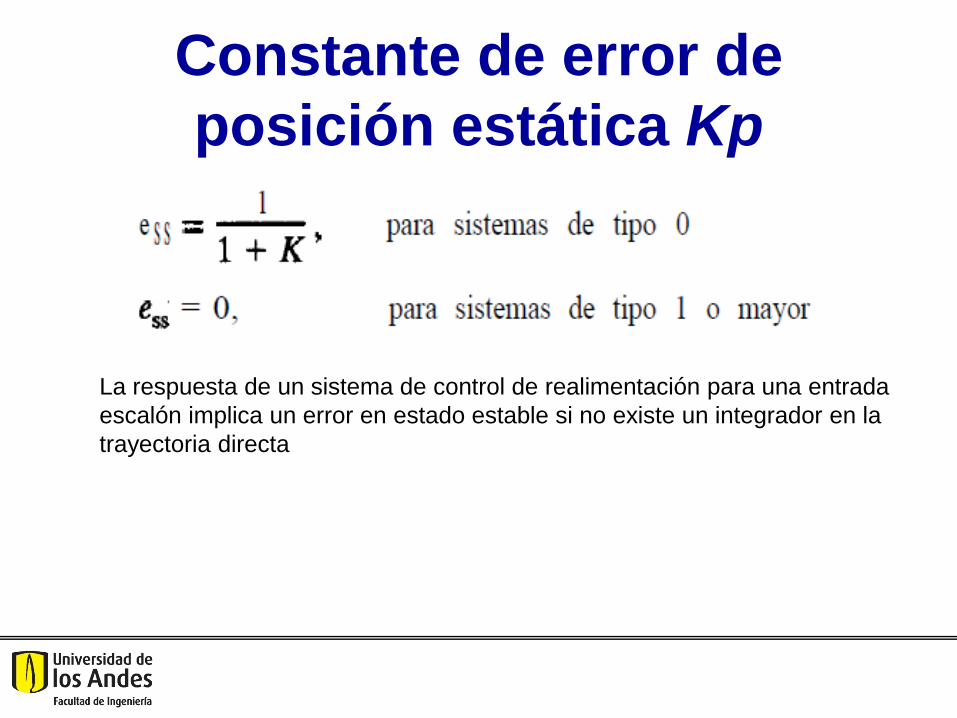
Constante de error de
posición estática Kp
La respuesta de un sistema de control de realimentación para una entrada
escalón implica un error en estado estable si no existe un integrador en la
trayectoria directa
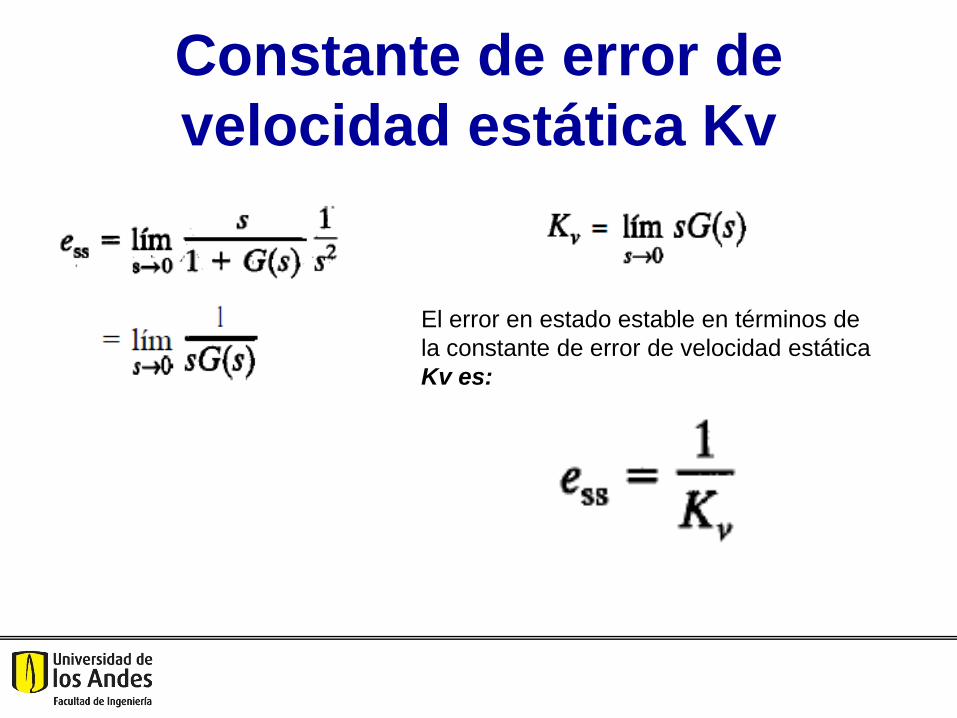
Constante de error de
velocidad estática Kv
El error en estado estable en términos de
la constante de error de velocidad estática
Kv es:
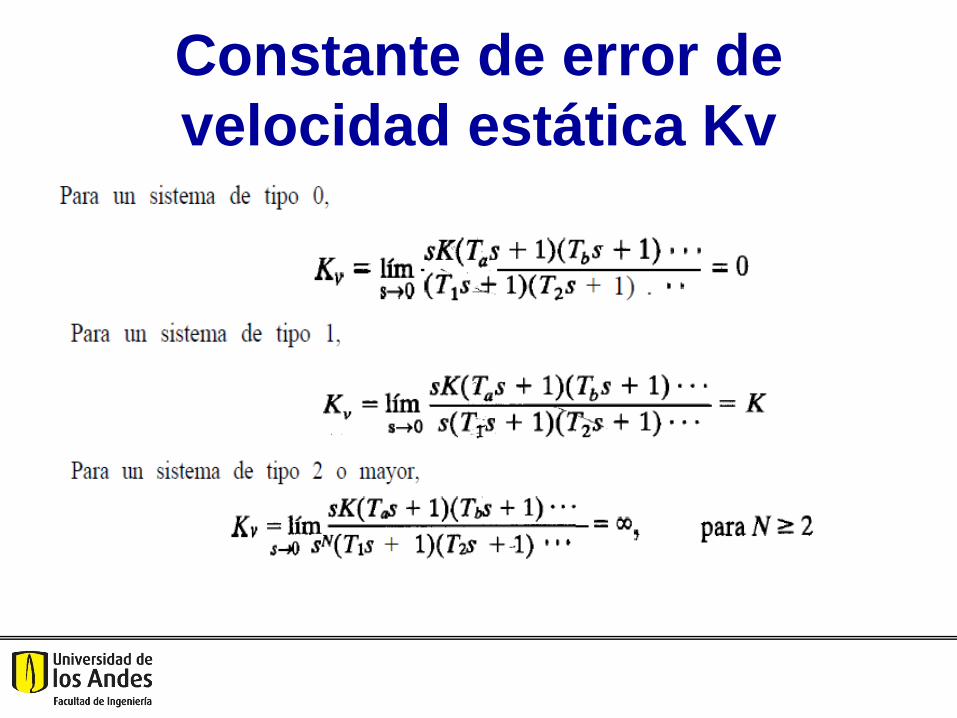
Constante de error de
velocidad estática Kv
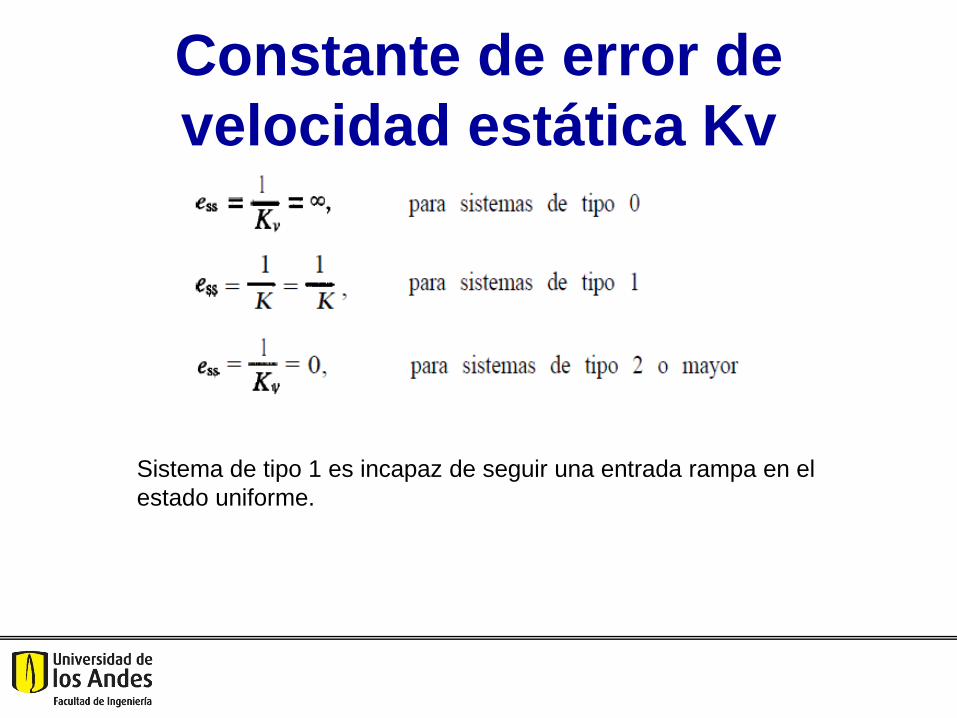
Constante de error de
velocidad estática Kv
Sistema de tipo 1 es incapaz de seguir una entrada rampa en el
estado uniforme.
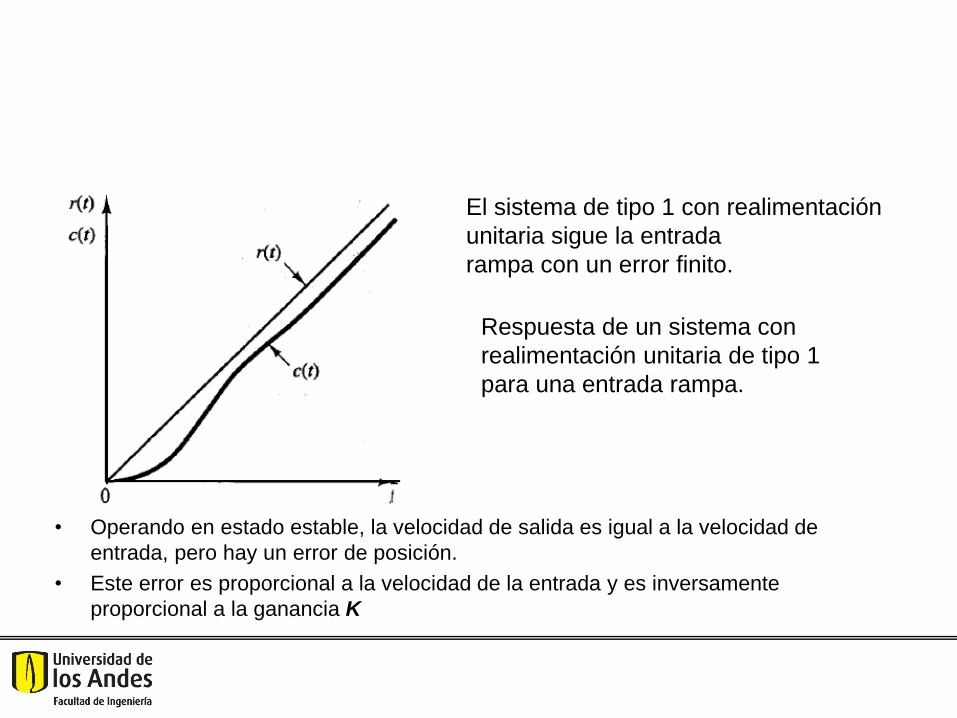
• Operando en estado estable, la velocidad de salida es igual a la velocidad de
entrada, pero hay un error de posición.
• Este error es proporcional a la velocidad de la entrada y es inversamente
proporcional a la ganancia K
El sistema de tipo 1 con realimentación
unitaria sigue la entrada
rampa con un error finito.
Respuesta de un sistema con
realimentación unitaria de tipo 1
para una entrada rampa.
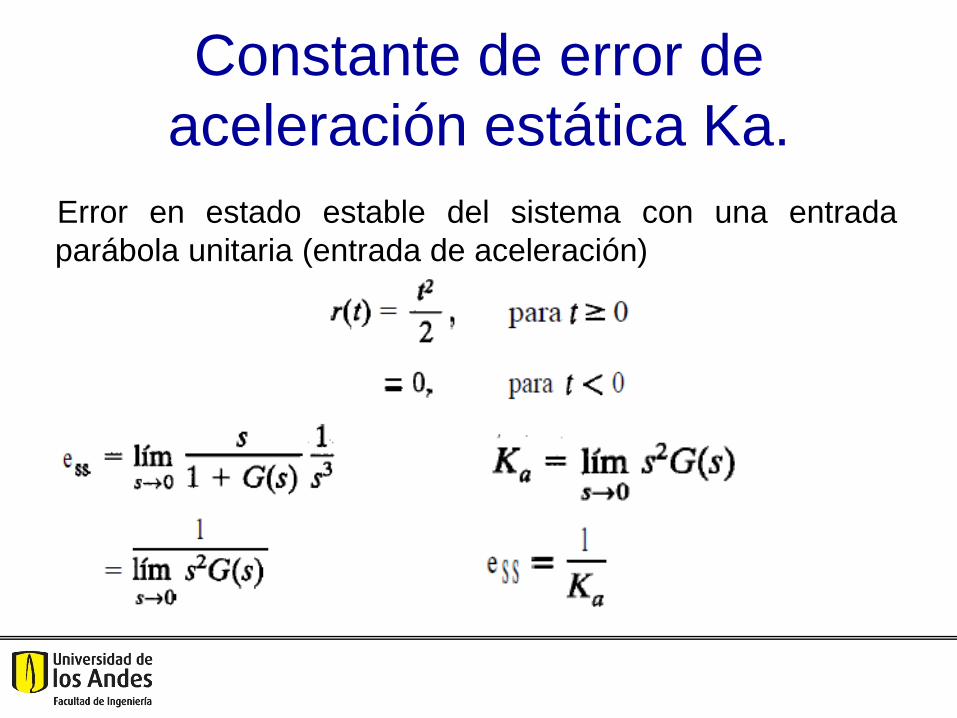
Constante de error de
aceleración estática Ka.
Error en estado estable del sistema con una entrada
parábola unitaria (entrada de aceleración)
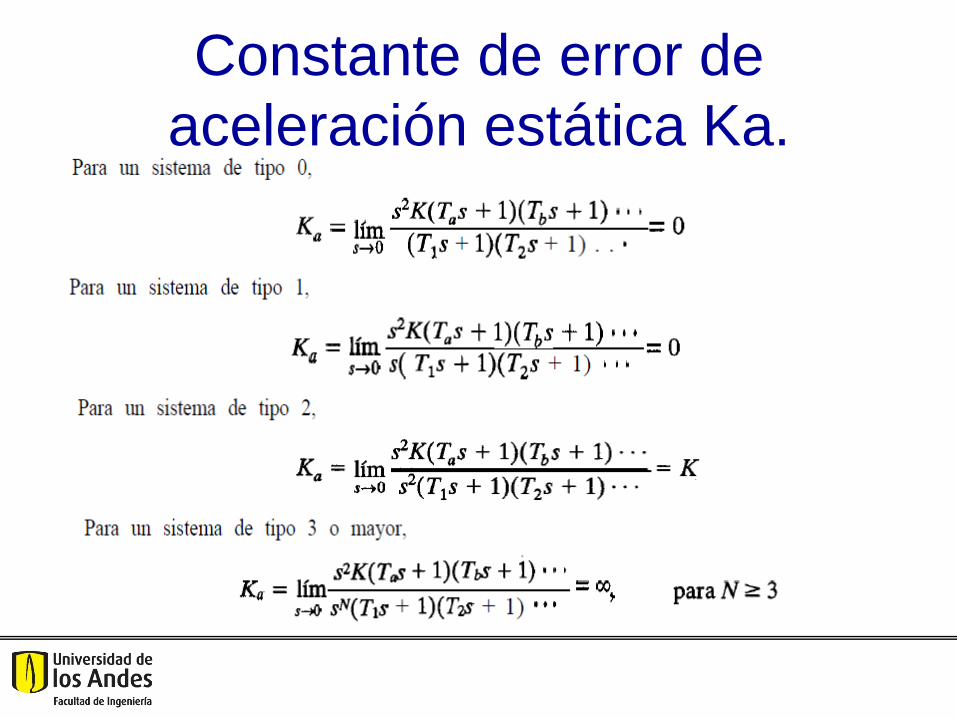
Constante de error de
aceleración estática Ka.
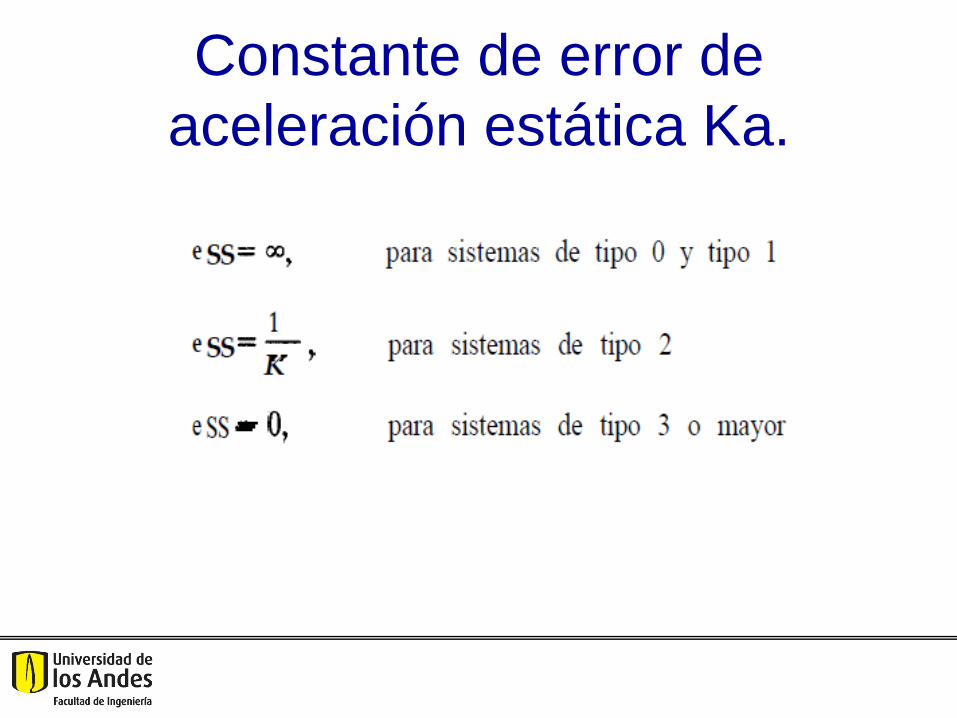
Constante de error de
aceleración estática Ka.
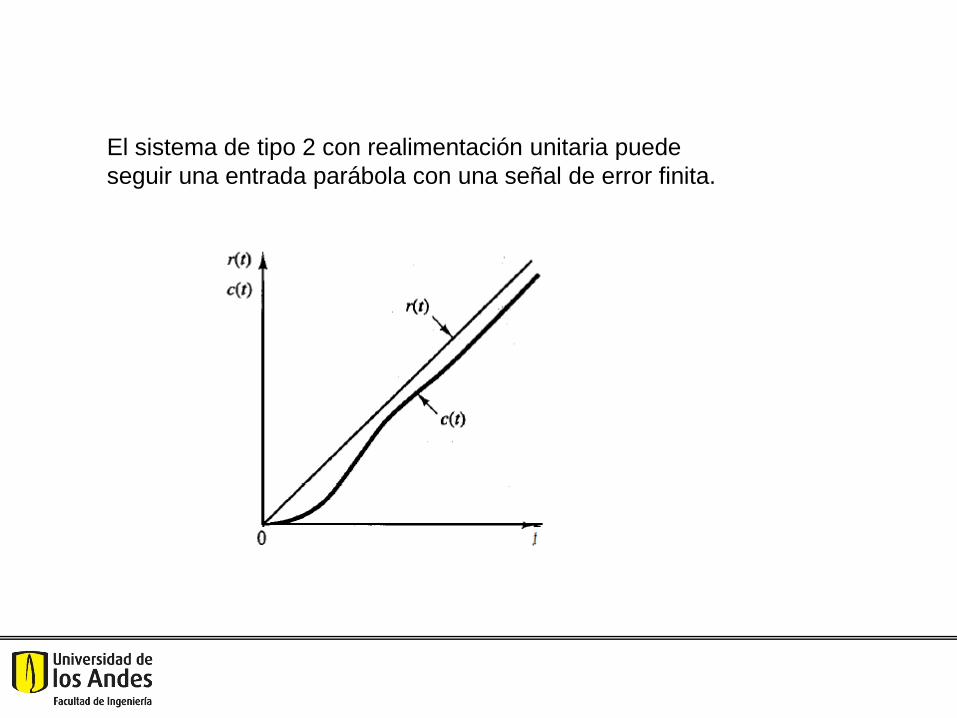
El sistema de tipo 2 con realimentación unitaria puede
seguir una entrada parábola con una señal de error finita.
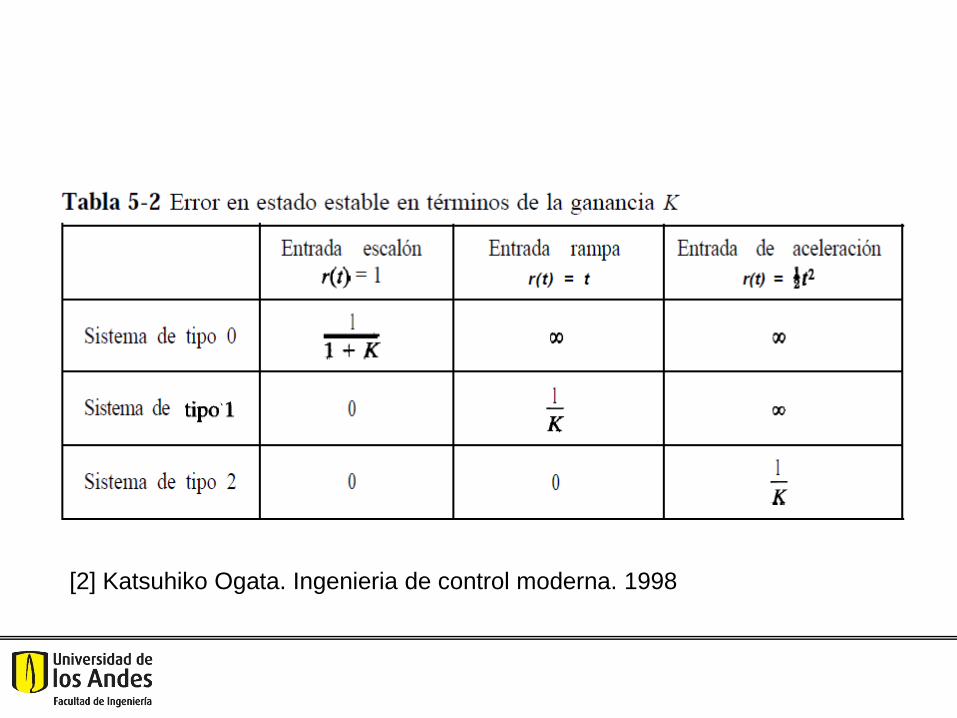
[2] Katsuhiko Ogata. Ingenieria de control moderna. 1998
Controladores PID:
Teoría y Sintonización
PID • Minorsky en 1922 introduce el controlador de tres
términos.
• Se tienen tres términos que están asociados con la señal de error.
• Para obtener una operación estable en la variable controlada, ésta debe ser una función continua del error: acción de control proporcional.
• La acción de control integral persiste mientras exista un error, i.e., tratará de reducir este valor a cero.
• La acción derivativa no depende de la magnitud del error. Para este caso, la salida se ve influenciada por la velocidad de cambio de la medida o el error.
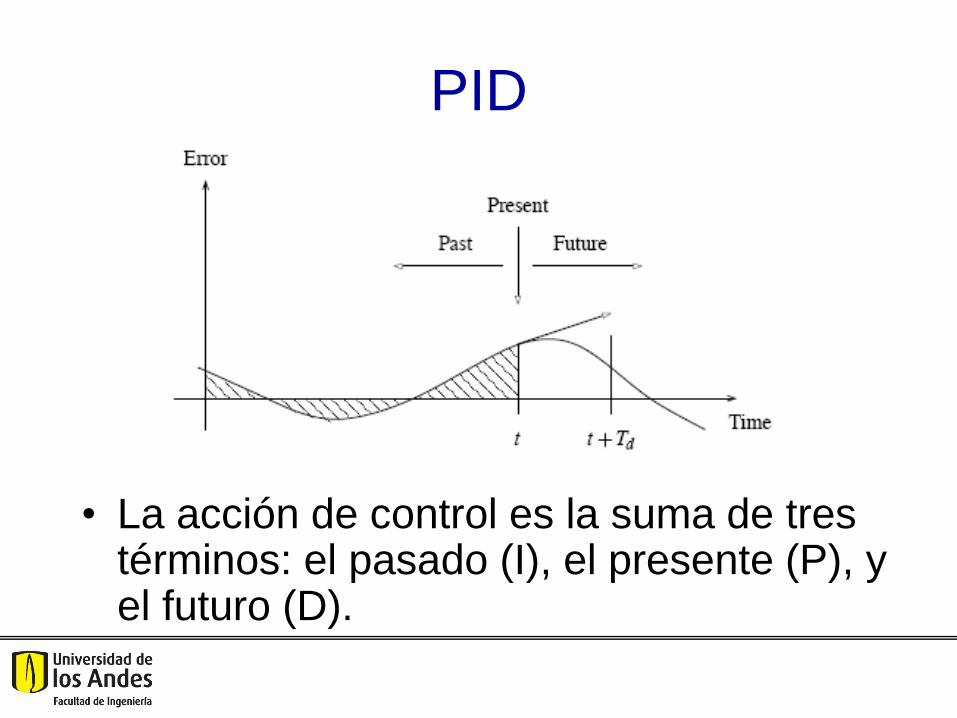
PID
• La acción de control es la suma de tres términos: el pasado (I), el presente (P), y el futuro (D).
Características
• En las frecuencias de trabajo, su función de transferencia es:
sT
sTK
sE
sUsD d
i
p
11
)(
)()(
Es el controlador más utilizado en la industria.
El ingeniero de control sólo debe hallar los tres parámetros del controlador, puede ser:
Al “ojo” (Díficil).
Métodos empíricos (Experimentales).
Métodos analíticos.
• LEY DE CONTROL:
)()( tekBtu p
pk
Donde:
Valor de Bias. Corresponde la salida del controlador
cuando el error es cero. Y corresponde al valor constante
cuando el controlador cambia a modo manual.
Ganancia del Controlador
B
)()( seksu pEn Laplace:
Acción de Control Proporcional
• Aumenta la velocidad de respuesta del sistema.
• La desventaja principal es que no garantiza error en estado estacionario (depende del tipo de la planta).
• El ess se puede hacer más pequeño si se aumenta la ganancia, pero ésta no debe aumentarse demasiado por que el sistema se puede volver inestable.
Acción de Control Proporcional
• LEY DE CONTROL:
Tiene como principio de funcionamiento la magnitud
y la duración del error. Es decir mientras exista
error la acción está trabajando y se detendrá
únicamente cuando el error desaparezca.
dtteKtU i )()(s
seKsU i
)()(
i
p
iT
KK
Constante de Integración Tiempo Integral
Acción de Control Integral
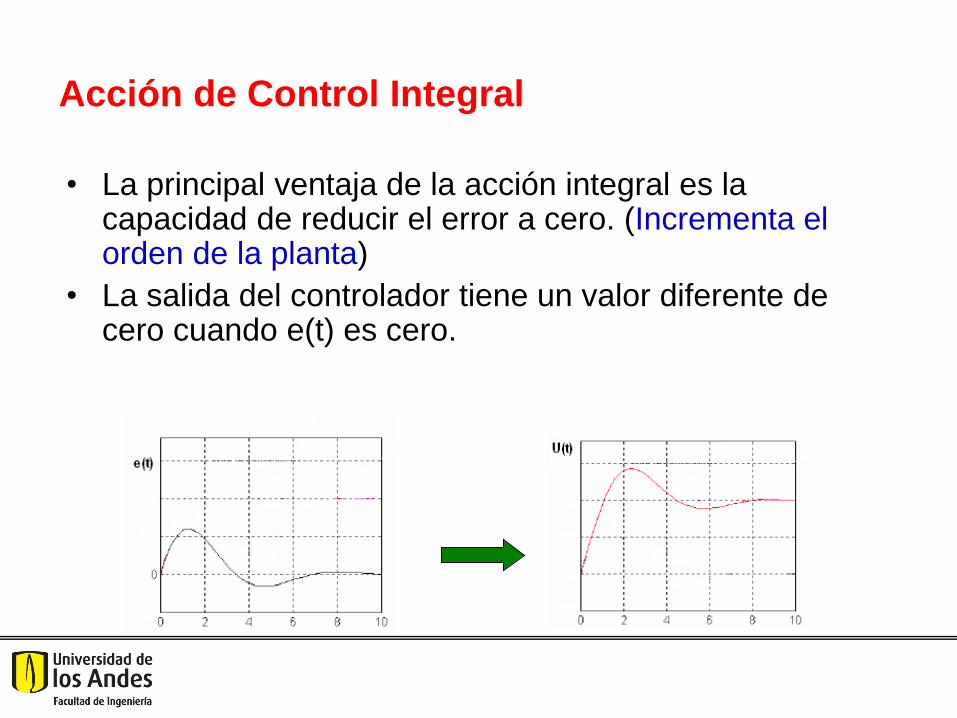
• La principal ventaja de la acción integral es la capacidad de reducir el error a cero. (Incrementa el orden de la planta)
• La salida del controlador tiene un valor diferente de cero cuando e(t) es cero.
Acción de Control Integral
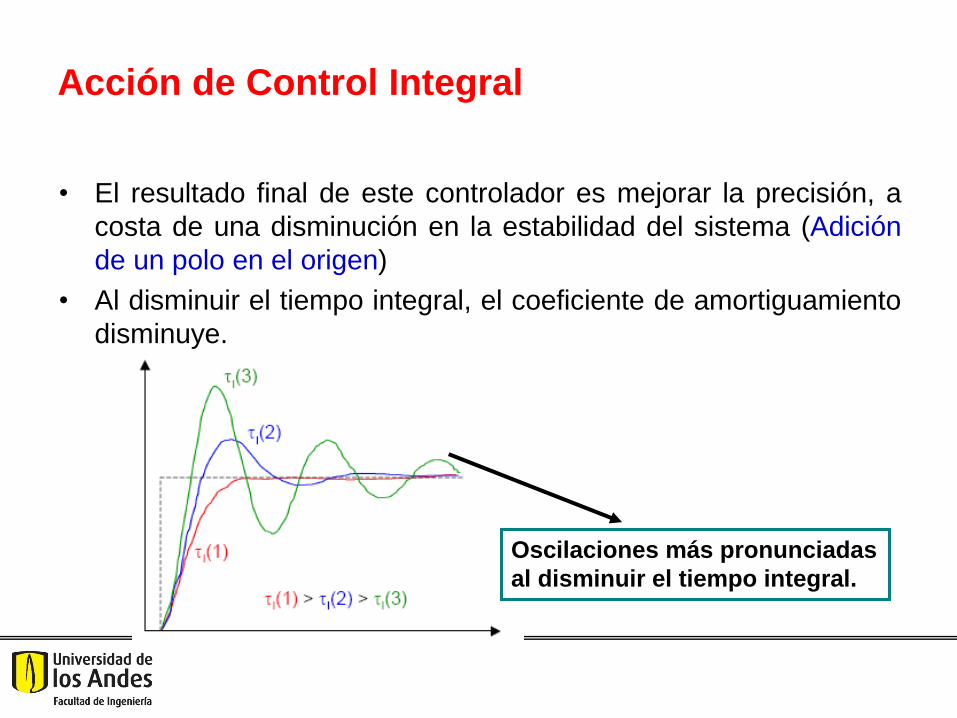
• El resultado final de este controlador es mejorar la precisión, a
costa de una disminución en la estabilidad del sistema (Adición
de un polo en el origen)
• Al disminuir el tiempo integral, el coeficiente de amortiguamiento
disminuye.
Acción de Control Integral
Oscilaciones más pronunciadas
al disminuir el tiempo integral.
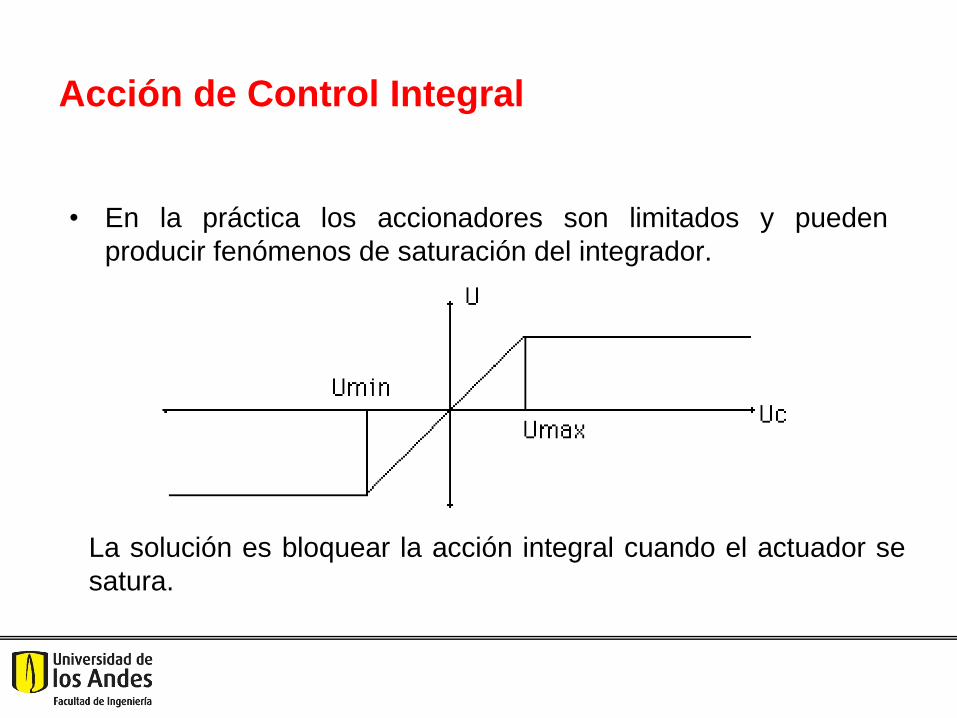
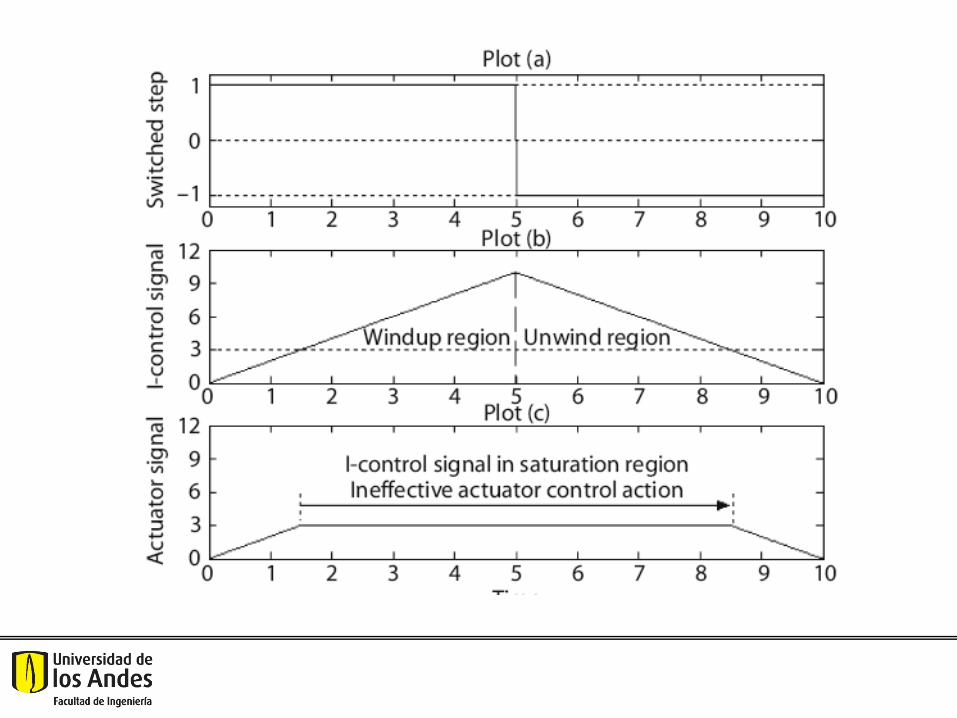
• En la práctica los accionadores son limitados y pueden
producir fenómenos de saturación del integrador.
Acción de Control Integral
La solución es bloquear la acción integral cuando el actuador se
satura.
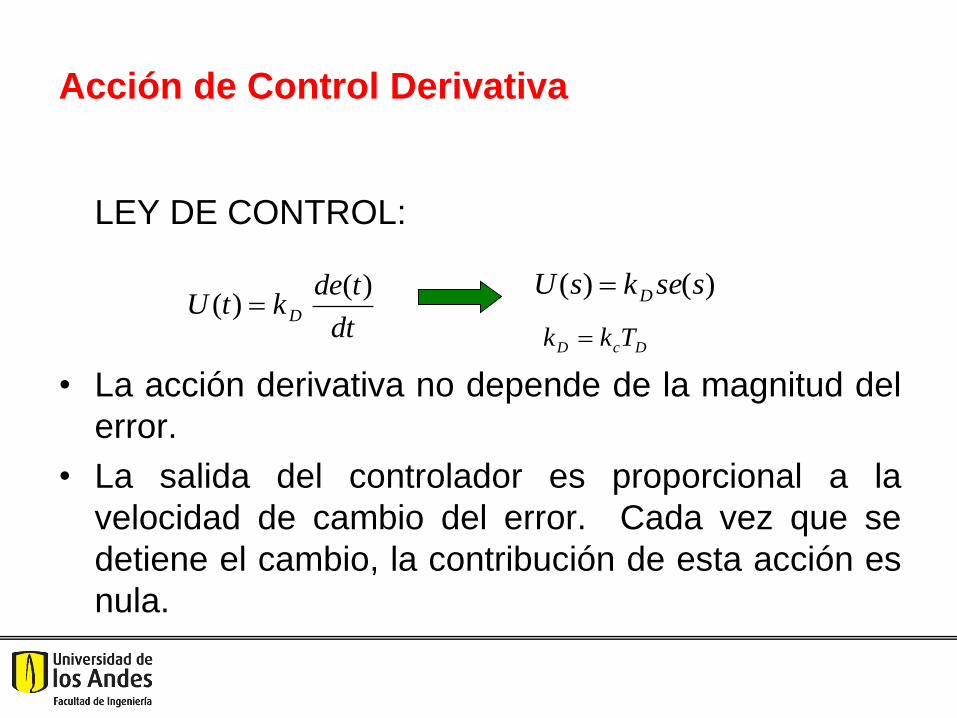
LEY DE CONTROL:
• La acción derivativa no depende de la magnitud del
error.
• La salida del controlador es proporcional a la
velocidad de cambio del error. Cada vez que se
detiene el cambio, la contribución de esta acción es
nula.
dt
tdektU D
)()(
)()( sseksU D
DcD Tkk
Acción de Control Derivativa
• Amortigua el sistema. No interviene en el estado
estable.
• Debido a su rápido funcionamiento con los cambios
abruptos, es una acción que no se recomienda para
sistemas con alto nivel de ruido.
Acción de Control Derivativa
Resumiendo
• Si se trataran individualmente cada uno de
los términos, unidos a una planta que es
estable en malla abierta se tendría que:
– Un incremento en Kp disminuiría el rise time,
aumentaría el overshoot, aumentaría
levemente el settling time, disiminuiría el error
en estado estacionario, y degradaría la
estabilidad.
K.Ang, G.Chong, and Y.Li, “PID Control System Analysis, Design, and Technology, IEEE CST, Vol 13 [4], p559-576, 2005
– Un aumento en Kp/Ti disminuiría levemente
el rise time, aumentaría el overshoot,
aumentaría el settling time, disminuiría
altamente el error en estado estacionario, y
degradaría la estabilidad.
– Un aumento en KpTd disminuiría levemente
el rise time, disminuiría el overshoot,
disminuiría el settling time, cambiaría
levemente el error en estado estacionario, y
mejoraría la estabilidad.
K.Ang, G.Chong, and Y.Li, “PID Control System Analysis, Design, and Technology, IEEE CST, Vol 13 [4], p559-576, 2005
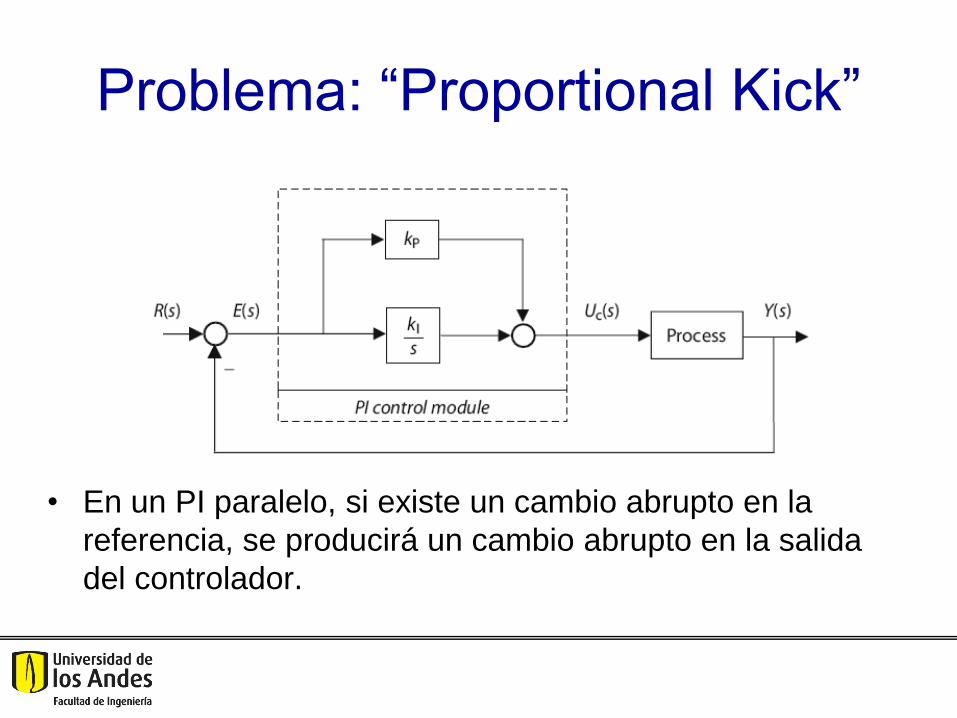
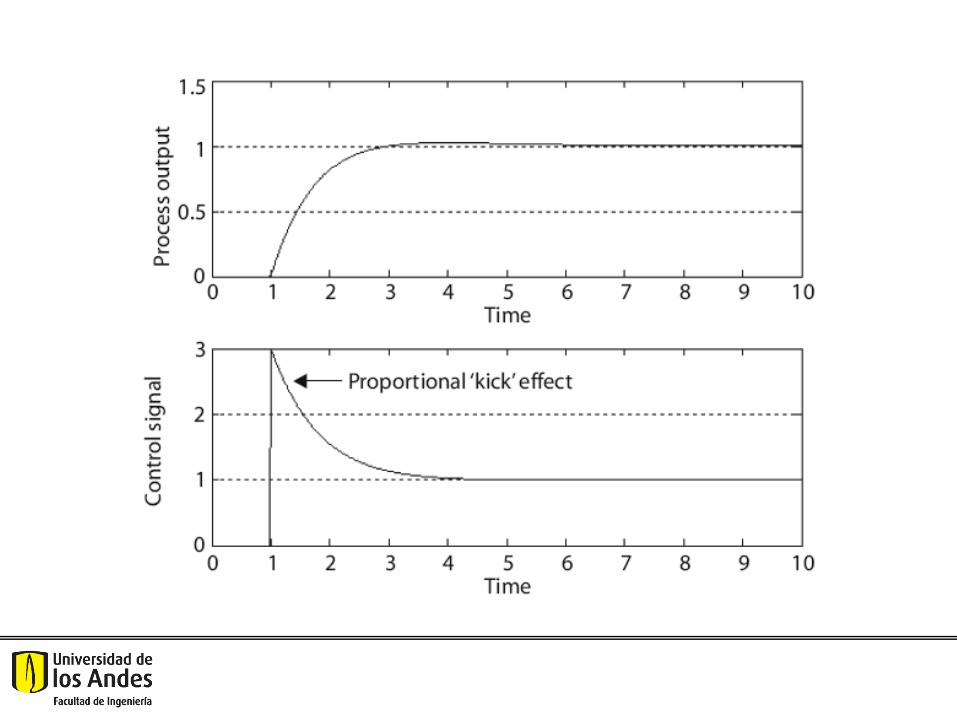
Problema: “Proportional Kick”
• En un PI paralelo, si existe un cambio abrupto en la
referencia, se producirá un cambio abrupto en la salida
del controlador.
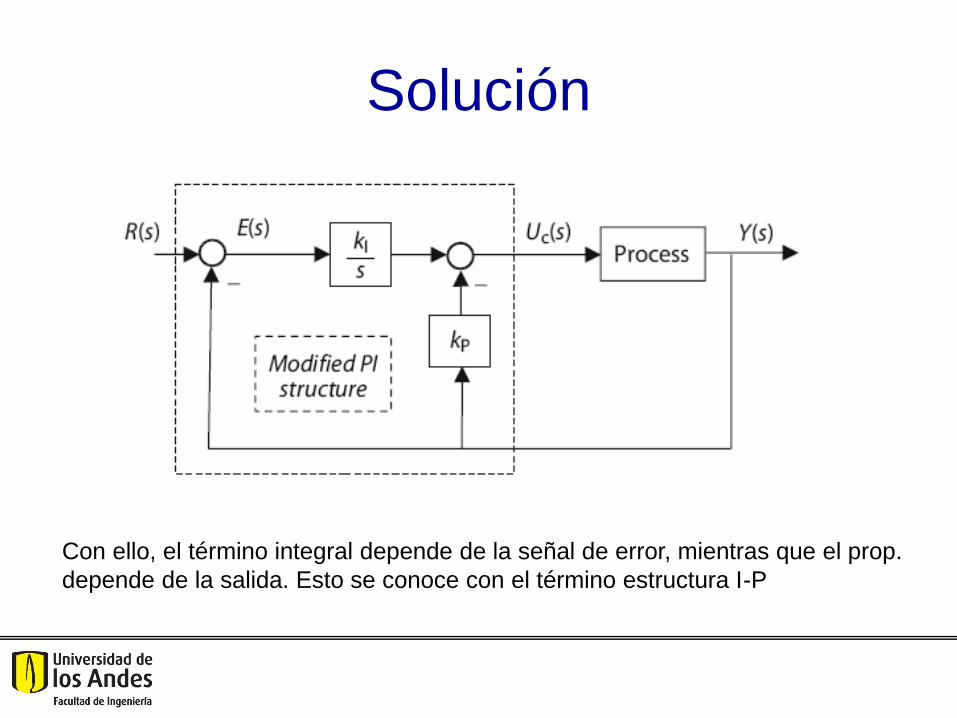
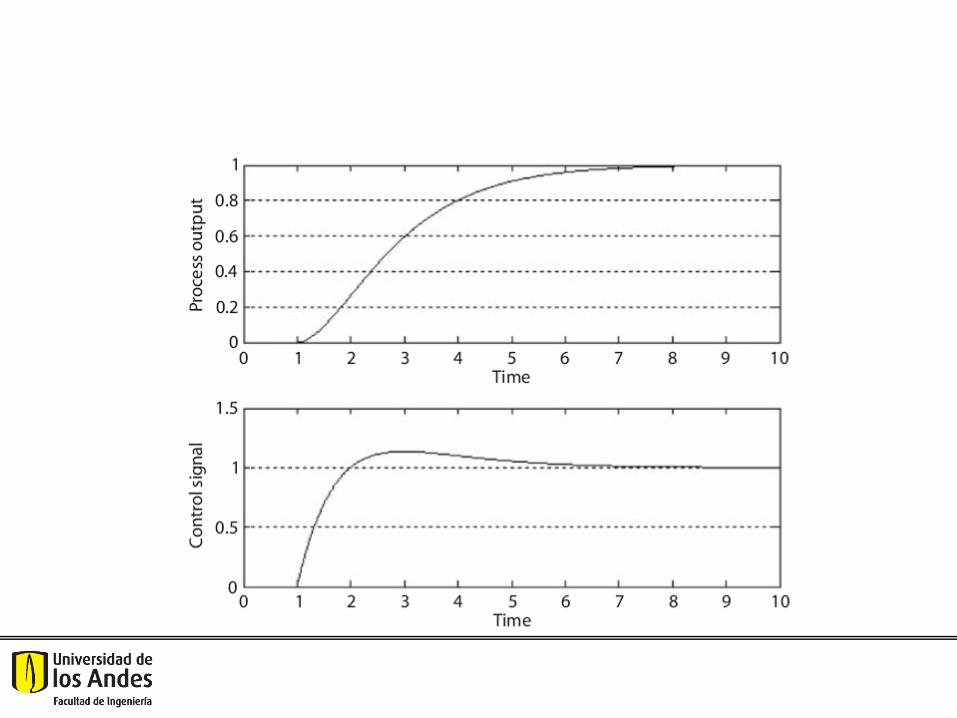
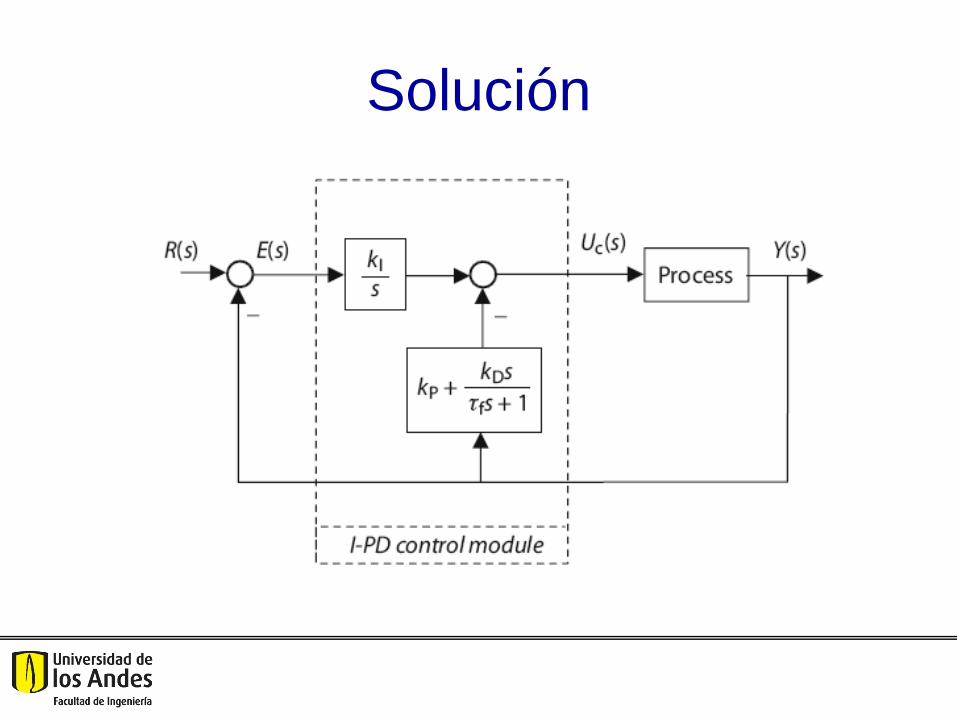
Solución
Con ello, el término integral depende de la señal de error, mientras que el prop.
depende de la salida. Esto se conoce con el término estructura I-P
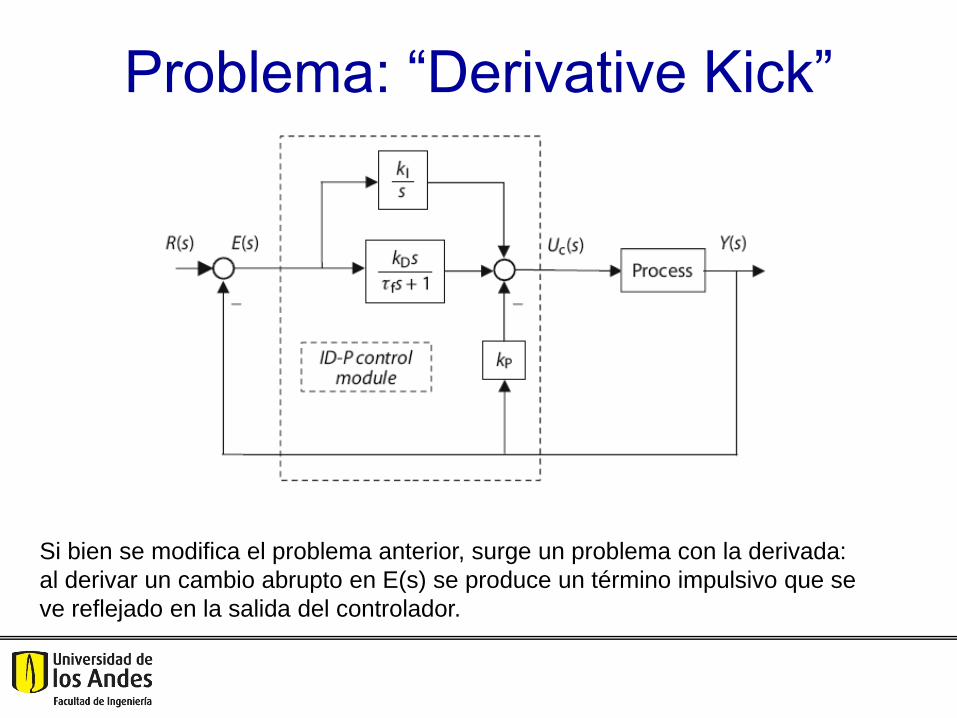
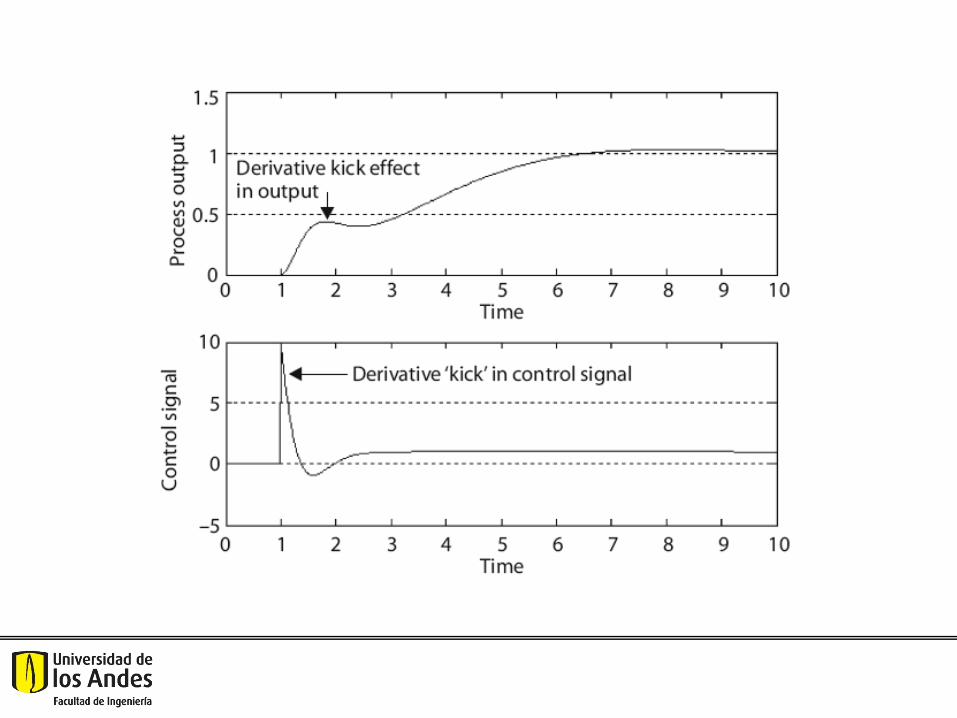
Problema: “Derivative Kick”
Si bien se modifica el problema anterior, surge un problema con la derivada:
al derivar un cambio abrupto en E(s) se produce un término impulsivo que se
ve reflejado en la salida del controlador.
Solución
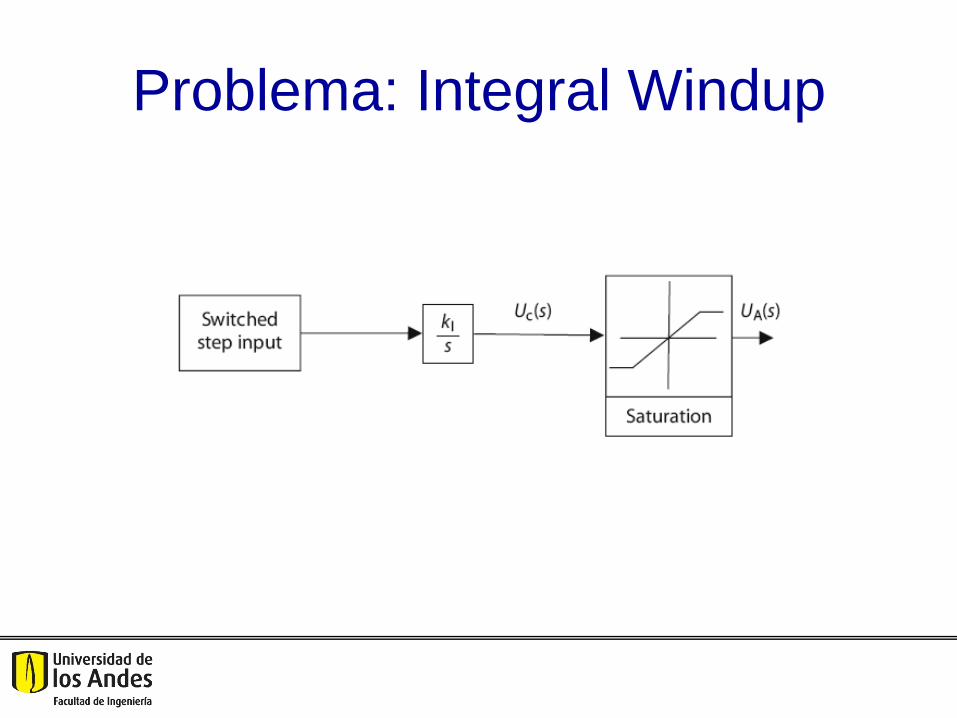
Problema: Integral Windup
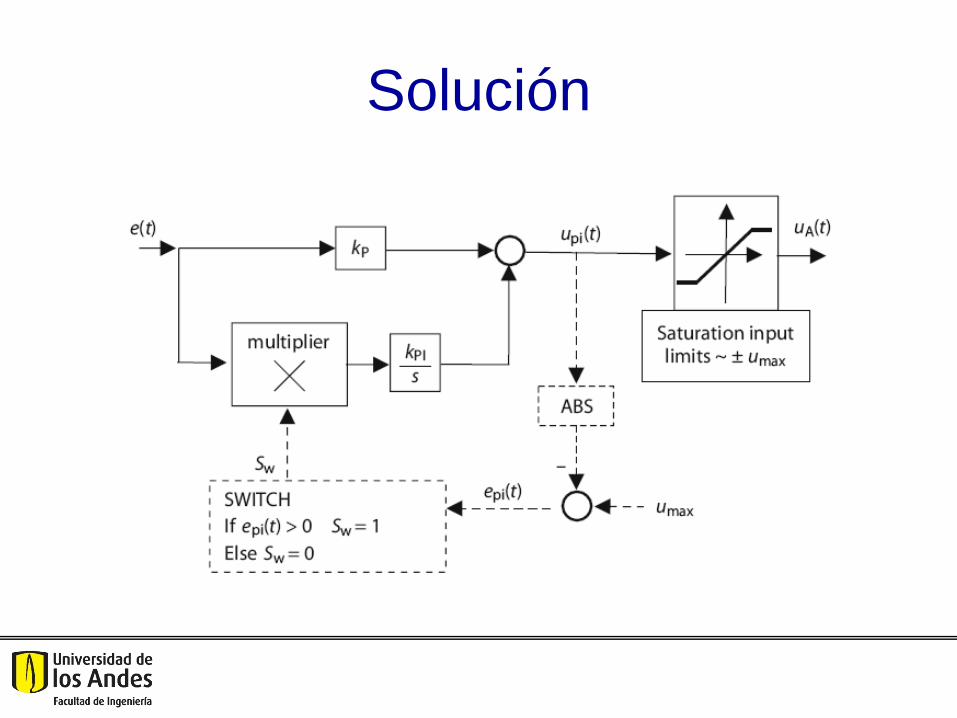
Solución
Métodos de Sintonización
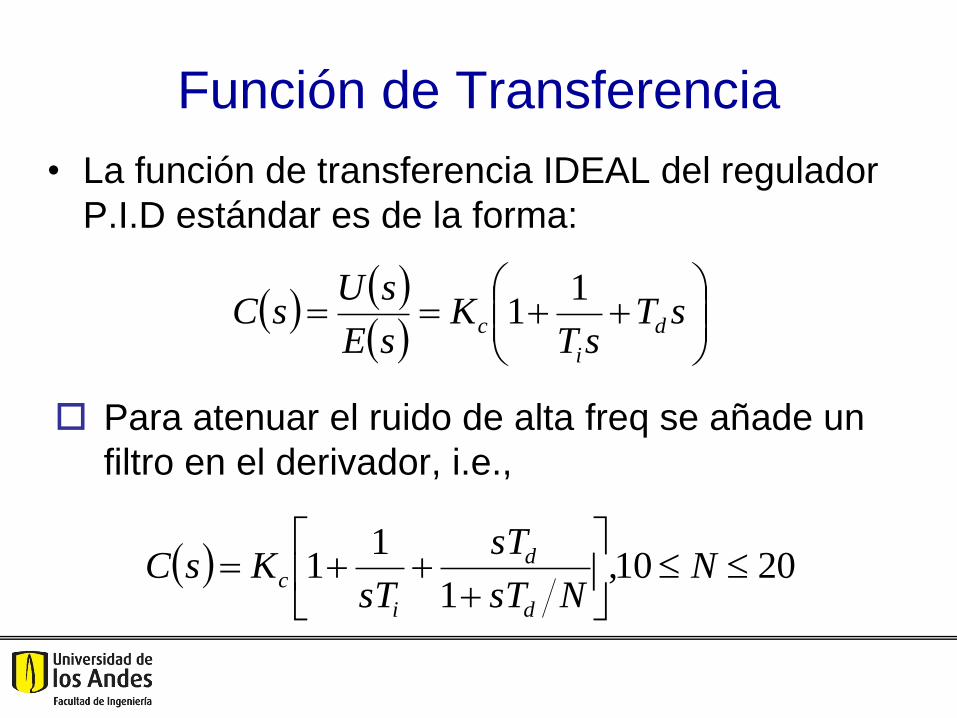
Función de Transferencia
• La función de transferencia IDEAL del regulador
P.I.D estándar es de la forma:
sT
sTK
sE
sUsC d
i
c
11
Para atenuar el ruido de alta freq se añade un
filtro en el derivador, i.e.,
2010,1
11
N
NsT
sT
sTKsC
d
d
i
c
Método Manual
• Es un método de ensayo y error => tedioso y
prolongado.
• La acción derivativa es muy complicada de utilizar,
por lo que no se utiliza por lo grl.
• Se inicializa con valores límites del PID y se varían
los parámetros hasta encontrar la respuesta
deseada.
• El método consiste en:
– Tomar valores límites, i.e., para Kc y Td valores
pequeños y el valor de Ti es grande.
– Doblar Kc, observar la respuesta y continuar este
mismo procedimiento hasta lograr oscilaciones
sostenidas (Ku). El valor final de Kc=Ku/2.
– Reducir Ti a la mitad de su valor, observar su
respuesta y continuar de la misma forma hasta
obtener oscilaciones sostenidas (Ti*). Ti=2Ti*
– Realizar el mismo procedimiento con Td: aumentar
Td hasta obtener una respuesta oscilatoria (Td*).
Td=Td*/3.
• Trabajar el lazo de control en modo automático sólo
con la acción proporcional.
• Utilizar el criterio de Routh-Hurwitz, y el método de
sustitución para:
– Ganancia última o crítica, Kcr
– Período último o crítico, Pcr
• Incrementar paulatinamente el valor de Kc desde 0
hasta Kcr donde se tienen oscilaciones sostenidas
por primera vez
Método Ziegler/Nichols: Malla Cerrada
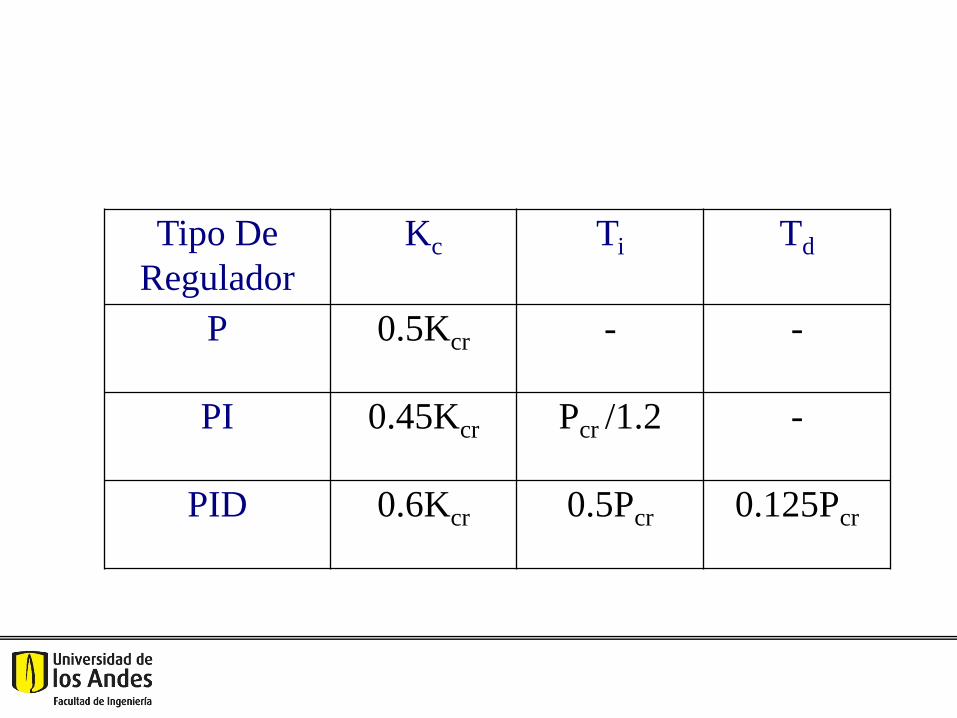
Tipo De
Regulador
Kc Ti Td
P 0.5Kcr - -
PI 0.45Kcr Pcr /1.2 -
PID 0.6Kcr 0.5Pcr 0.125Pcr
• Ejemplo.
• Método empírico que busca obtener una
caída de un cuarto, i.e., la relación de
amplitudes de dos oscilaciones sucesivas
es un cuarto.
• Si MP entre 10% y 60%, este método se
puede aplicar.
• Pretende ajustar el controlador a partir del
modelo del proceso a entrada paso.
• Se tiene una curva de reacción, i.e., en forma de
S luego de excitar el sistema.
• Esto suele suceder si el proceso no tiene
integrador(es), o polos dominantes complejos
conjugados.
• Si la respuesta no está en esta forma no se
puede aplicar el método.
Método Ziegler/Nichols: Malla Abierta
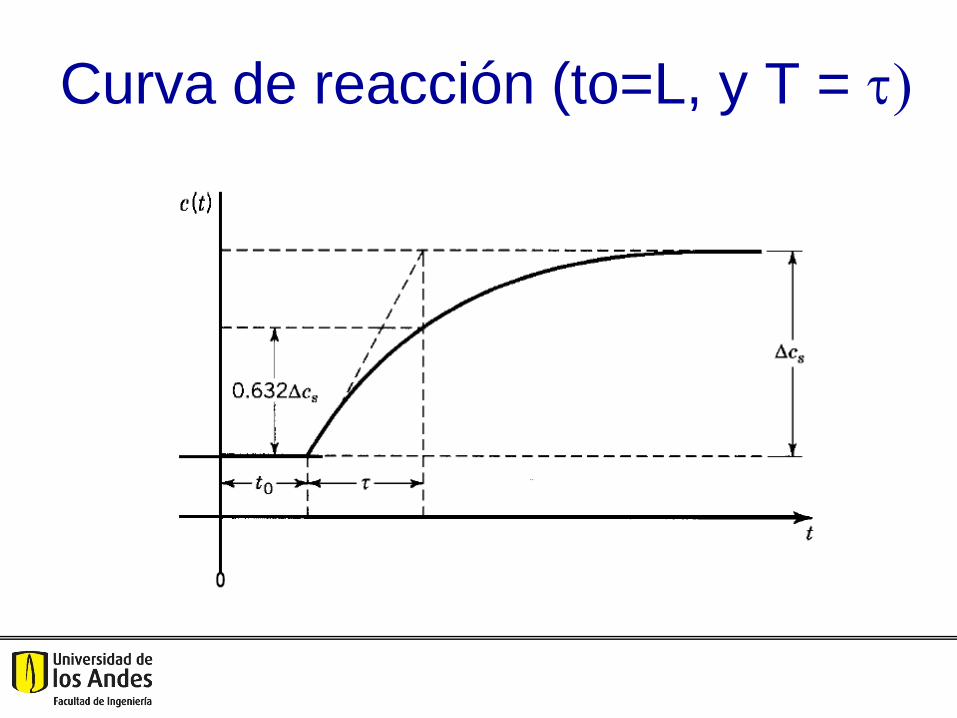
Curva de reacción (to=L, y T = t
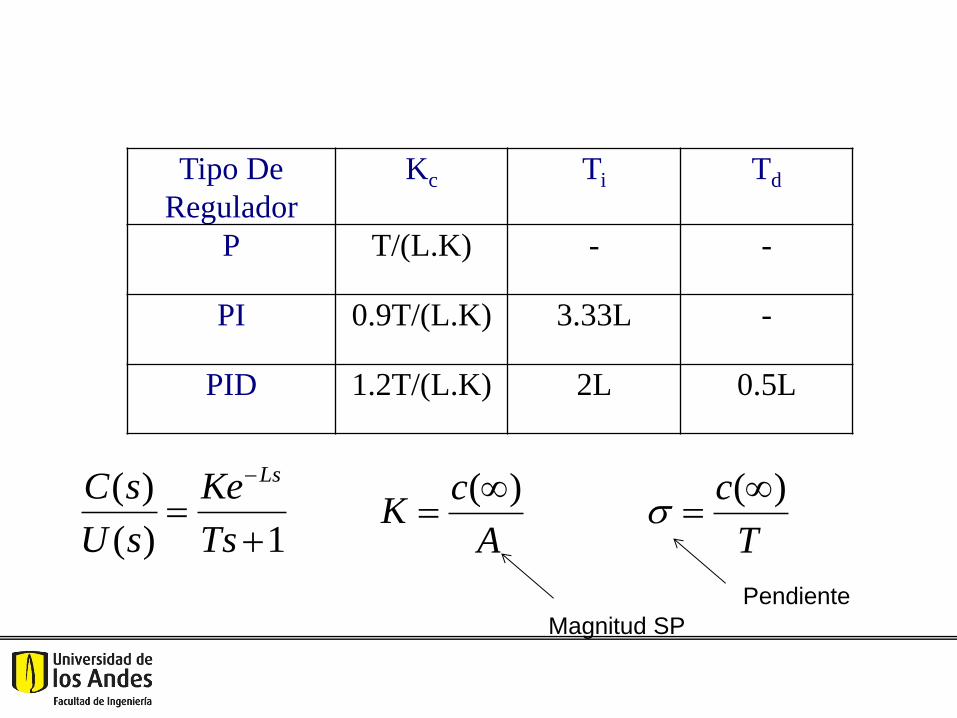
Tipo De
Regulador
Kc Ti Td
P T/(L.K) - -
PI 0.9T/(L.K) 3.33L -
PID 1.2T/(L.K) 2L 0.5L
A
cK
)(
T
c )(
1)(
)(
Ts
Ke
sU
sC Ls
Pendiente
Magnitud SP
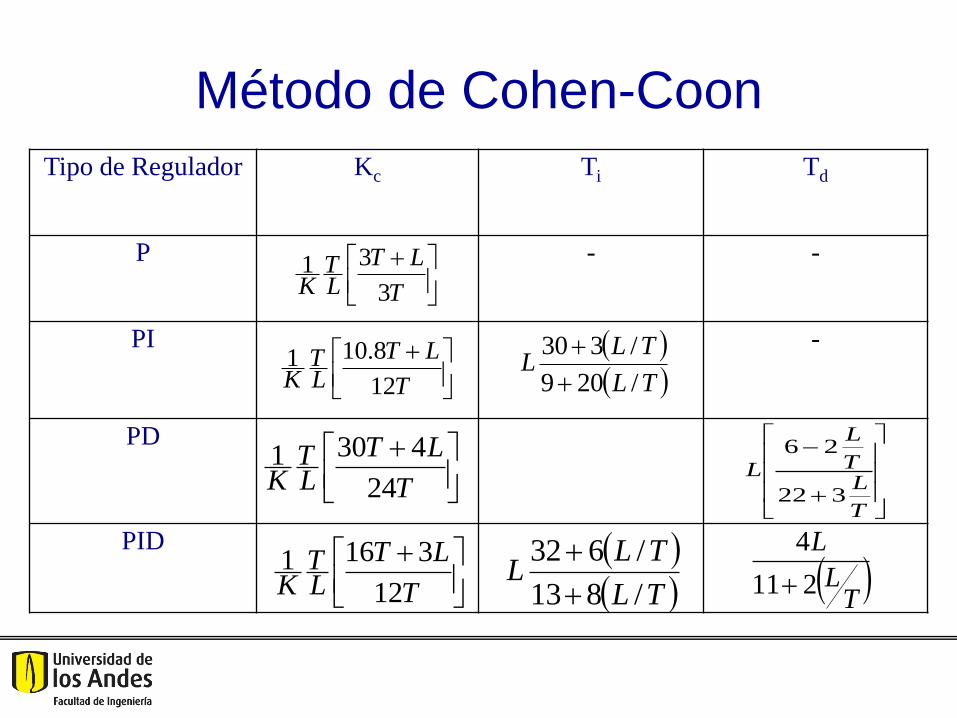
Método de Cohen-Coon
Tipo de Regulador Kc Ti Td
P - -
PI -
PD
PID
T
LT
LT
K 3
31
T
LT
LT
K 12
8.101 TL
TLL
/209
/330
T
LT
LT
K 12
3161 TL
TLL
/813
/632
TL
L
211
4
T
LT
LT
K 24
4301
T
LT
L
L
322
26
Método del Coeficiente de Ajustabilidad
• Los métodos de Ziegler - Nichols y de Cohen -
Coon, son difíciles de aplicar en la práctica,
porque llevan a un comportamiento muy
oscilatorio.
• Instrumentistas implementaron una versión
derivada de estas reglas que también se basa en
el modelo de primer orden con retardo, utilizando
el coeficiente de ajustabilidad r_c = L/T.
• Se recomienda que en ambos casos se tenga que:
0.1 < L/T < 1
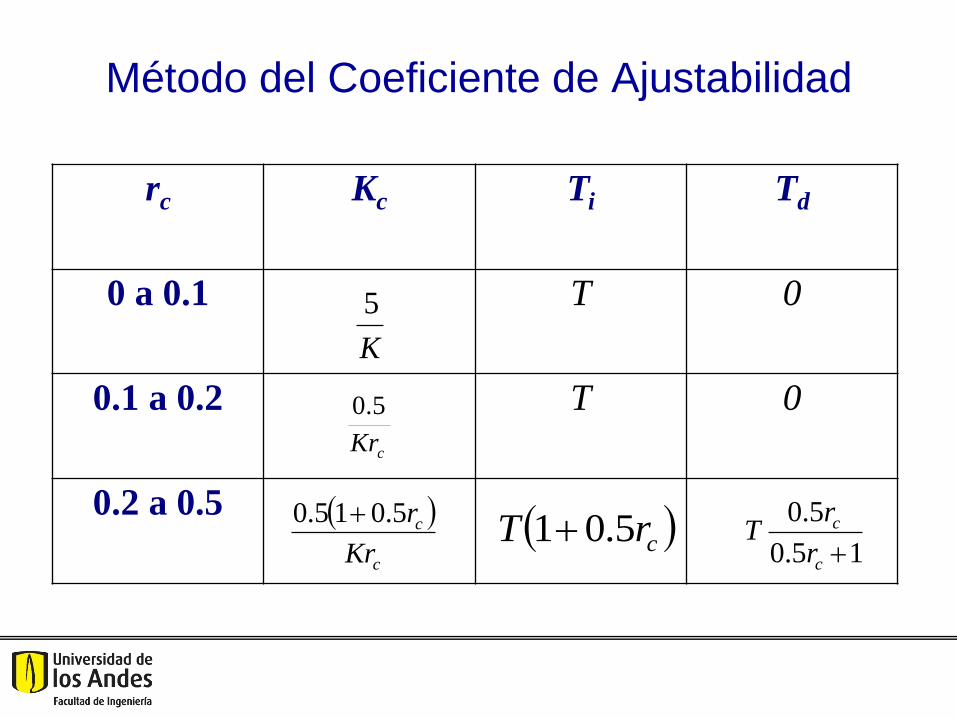
Método del Coeficiente de Ajustabilidad
rc Kc Ti Td
0 a 0.1 T 0
0.1 a 0.2 T 0
0.2 a 0.5
5
K
cKr
5.0
c
c
Kr
r5.015.0 crT 5.0115.0
5.0
c
c
r
rT
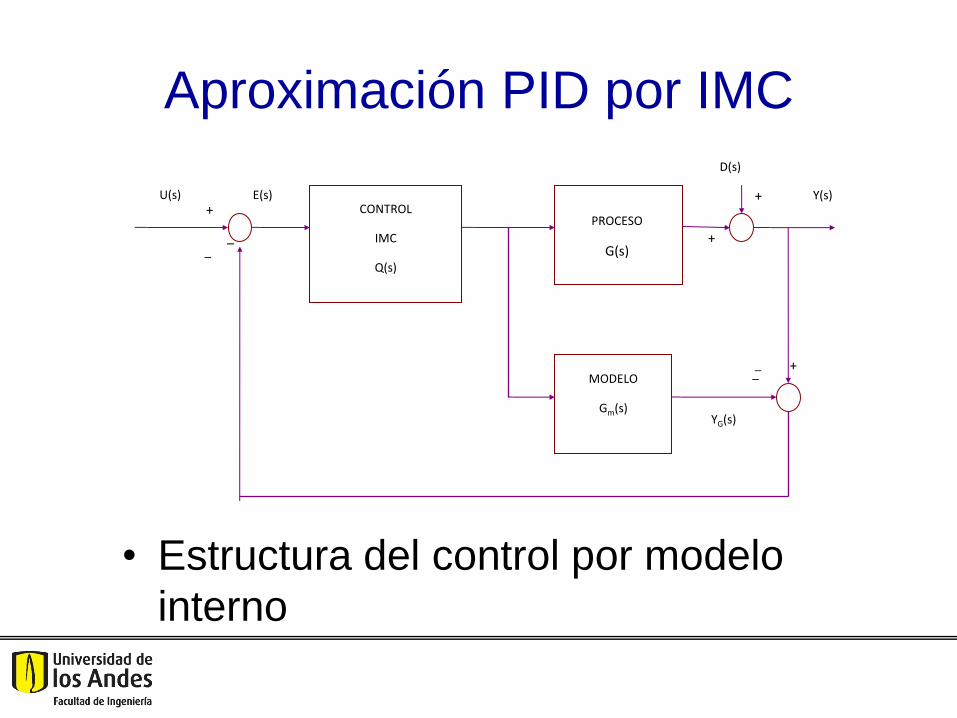
Aproximación PID por IMC
• Estructura del control por modelo
interno
_
YG(s)
E(s)
_
_
+
+
+
MODELO
Gm(s)
CONTROL
IMC
Q(s)
PROCESO
G(s)
U(s)
D(s)
Y(s) +
_
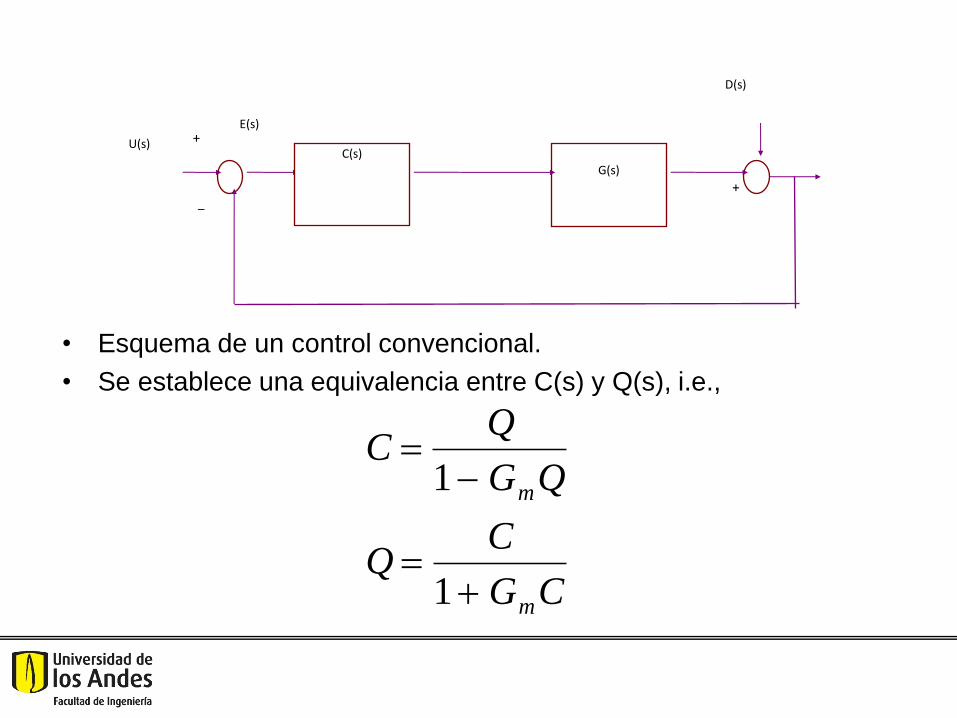
• Esquema de un control convencional.
• Se establece una equivalencia entre C(s) y Q(s), i.e.,
E(s)
D(s)
+ _
C(s) G(s)
+ U(s)
CQ
G Q
QC
G C
m
m
1
1
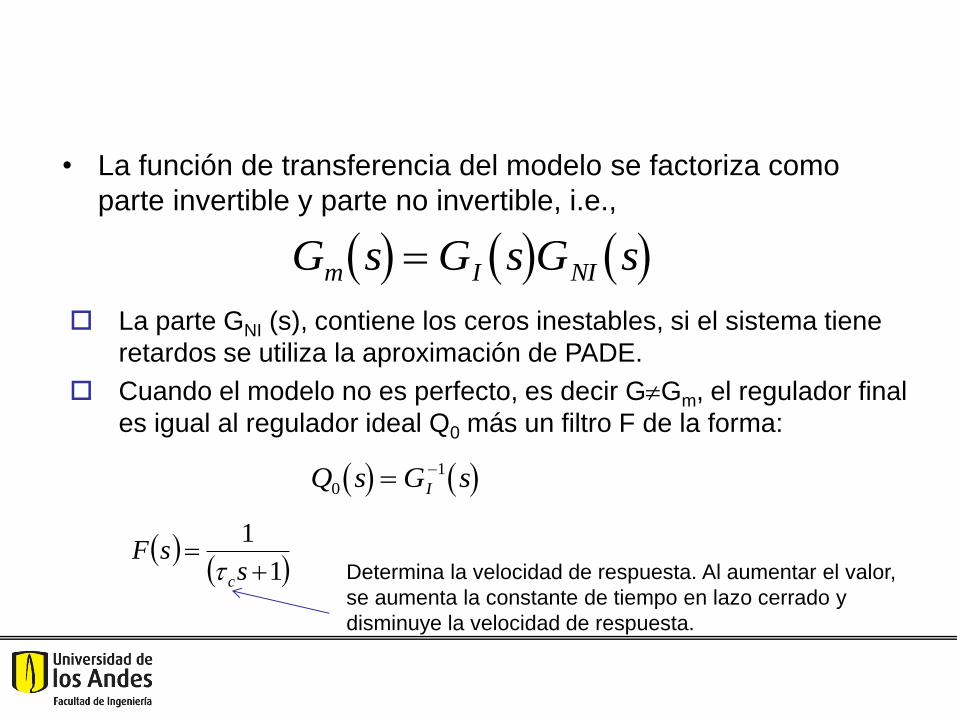
• La función de transferencia del modelo se factoriza como
parte invertible y parte no invertible, i.e.,
G s G s G sm I NI
La parte GNI (s), contiene los ceros inestables, si el sistema tiene
retardos se utiliza la aproximación de PADE.
Cuando el modelo no es perfecto, es decir GGm, el regulador final
es igual al regulador ideal Q0 más un filtro F de la forma:
Q s G sI0
1
1
1
ssF
ct Determina la velocidad de respuesta. Al aumentar el valor,
se aumenta la constante de tiempo en lazo cerrado y
disminuye la velocidad de respuesta.
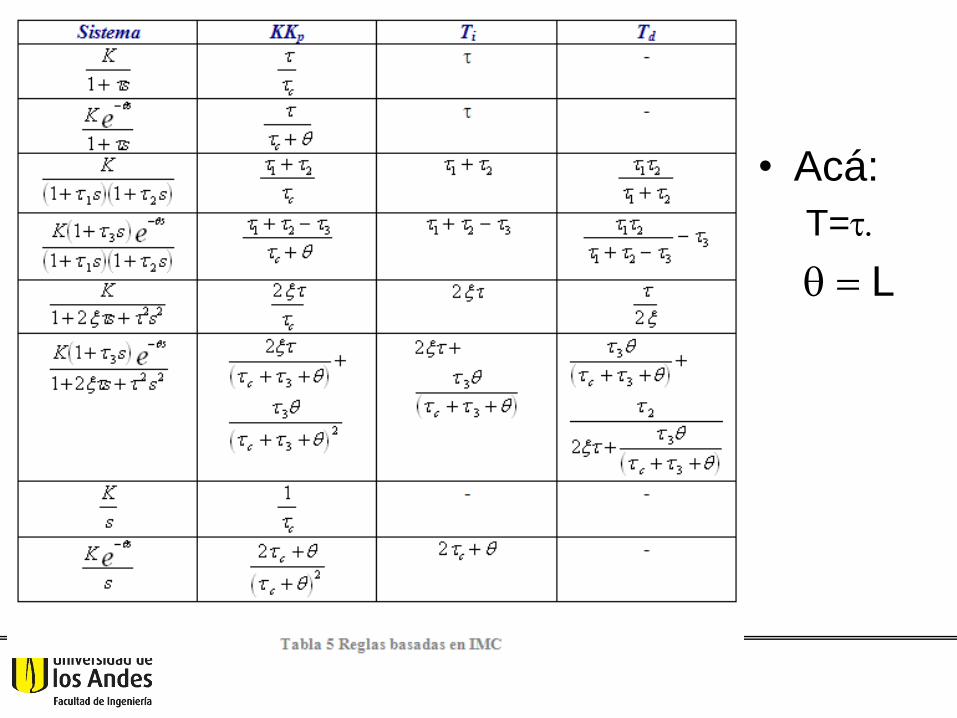
• Acá:
T=t.
q L
Síntesis Directa
• Este método no parte de un algoritmo en particular para
el controlador.
• Objetivo: encontrar una función de transferencia del
controlador que cumpla con las especificaciones de lazo
cerrado dadas.
• Se utiliza el modelo de malla abierta del proceso.
• Problema: con este método no necesariamente se
garantiza que el controlador va a existir en la vida real,
pero sirve para tener una idea de qué tipo de controlador
podría utilizarse.
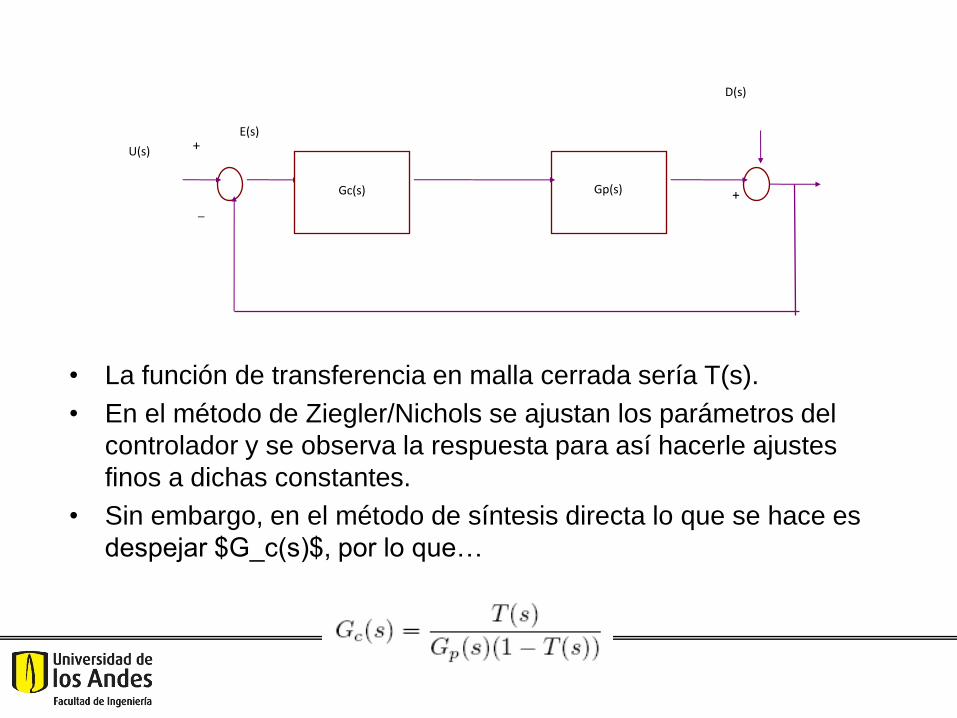
• La función de transferencia en malla cerrada sería T(s).
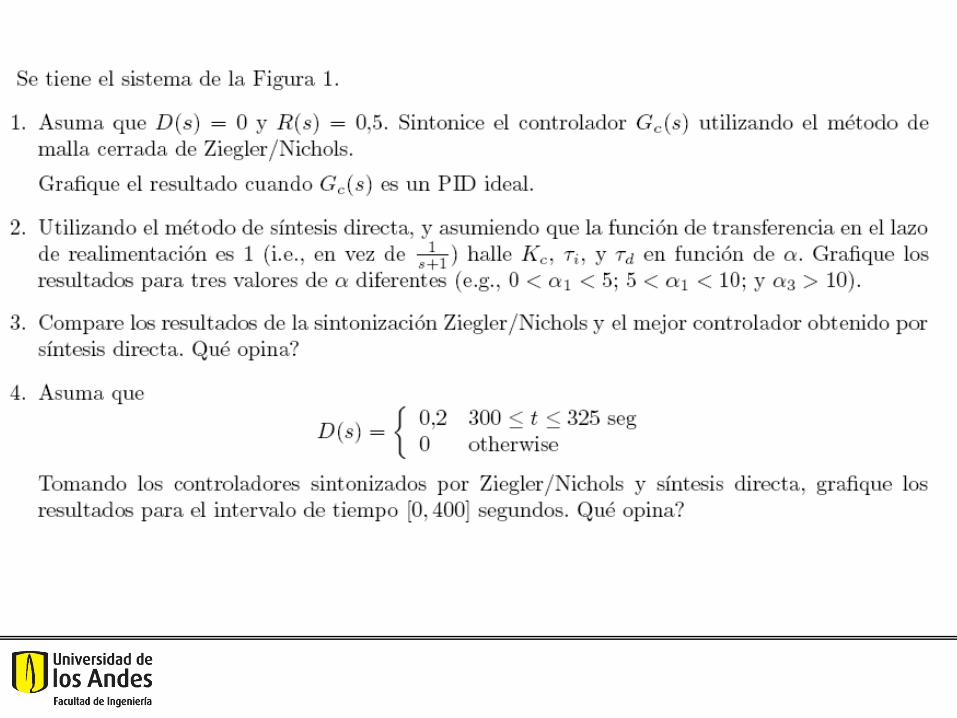
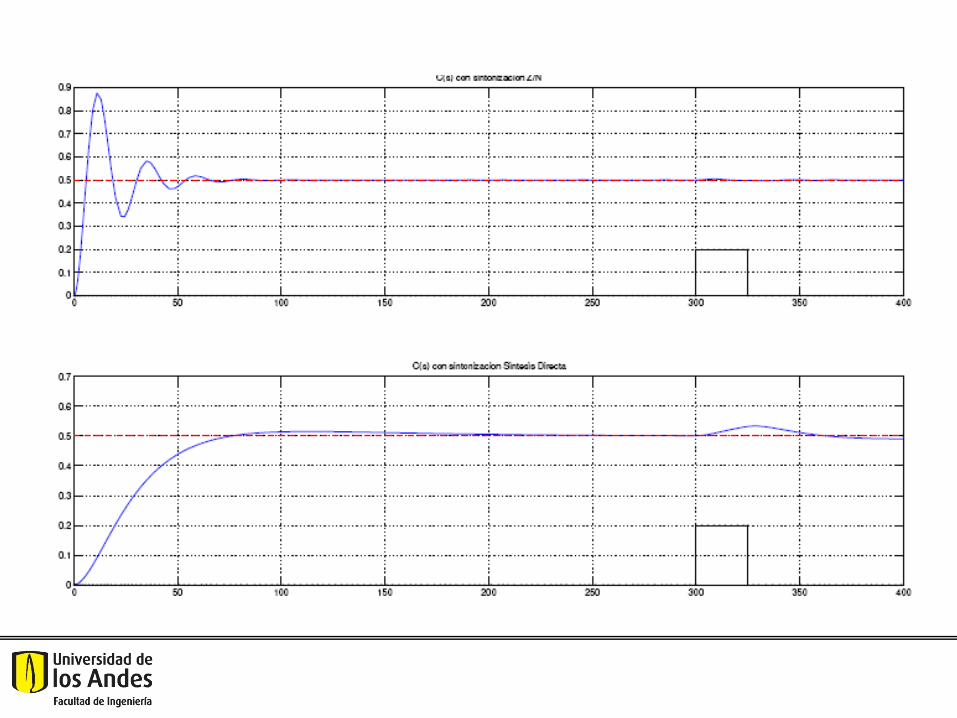
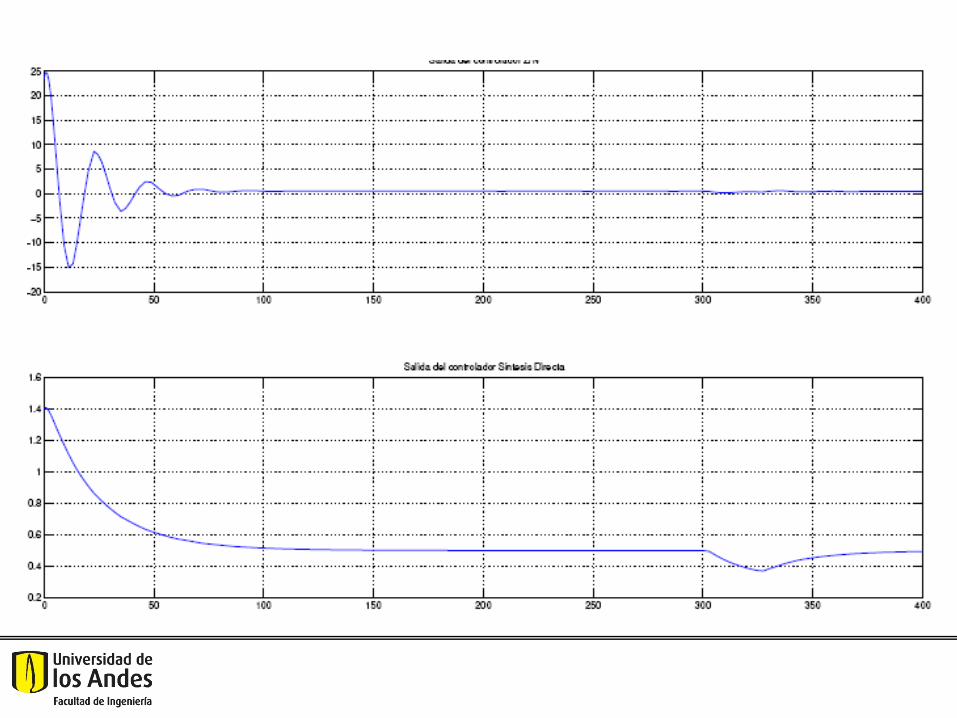
• En el método de Ziegler/Nichols se ajustan los parámetros del
controlador y se observa la respuesta para así hacerle ajustes
finos a dichas constantes.
• Sin embargo, en el método de síntesis directa lo que se hace es
despejar $G_c(s)$, por lo que…
E(s)
D(s)
+ _
Gc(s) Gp(s)
+ U(s)
Síntesis Directa
• La Ecuación anterior será la del controlador, ya que uno tiene
características propias de diseño para T(s).
• Esta ecuación se conoce como la ecuación de síntesis, y lo difícil
en este caso es la selección de T(s).
• Sin embargo, algunas características básicas que se tienen que
cumplir son:
– El error en estado estable debe ser nulo.
– La respuesta del sistema debe ser lo suficientemente rápida,
pero el sobreimpulso debe ser lo más pequeño posible.
– T(s) tiene que ser una función simple matemáticamente
hablando.
• Matemáticamente…
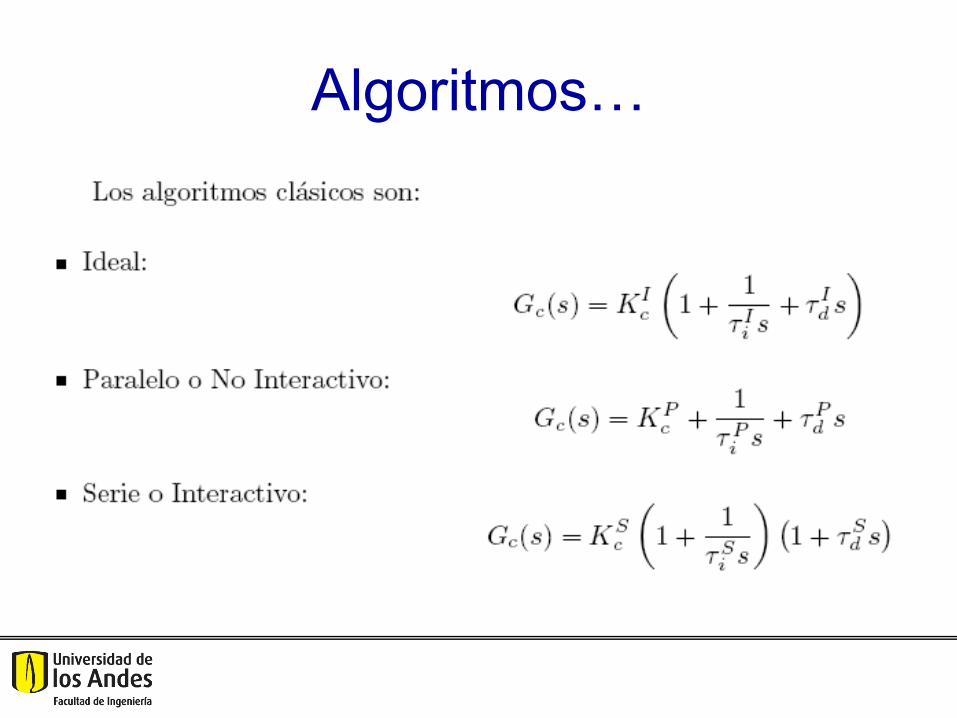
Algoritmos…
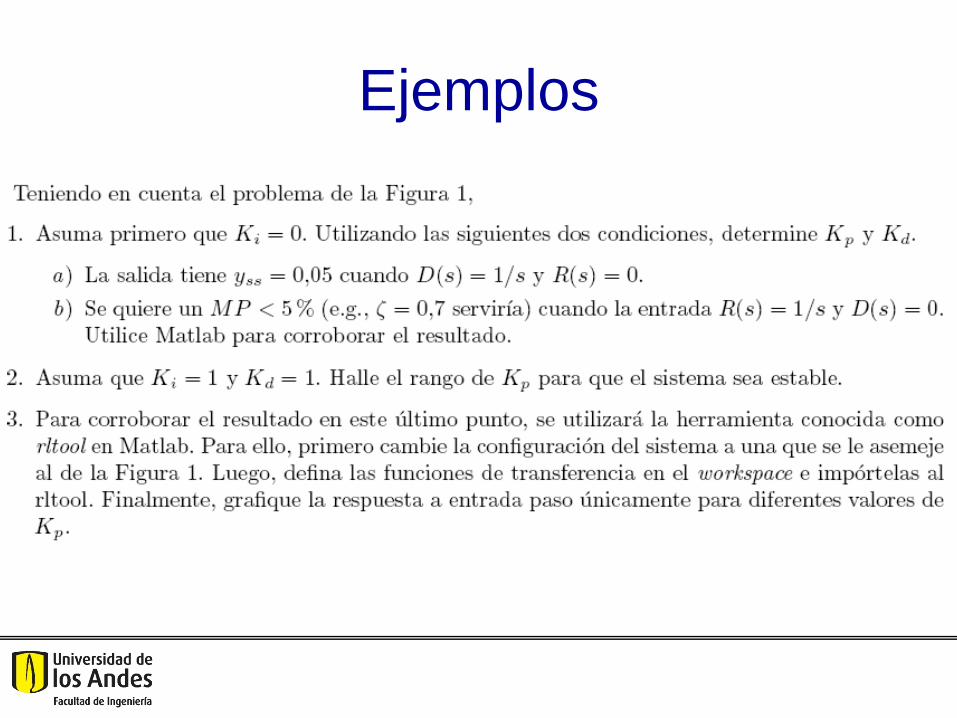
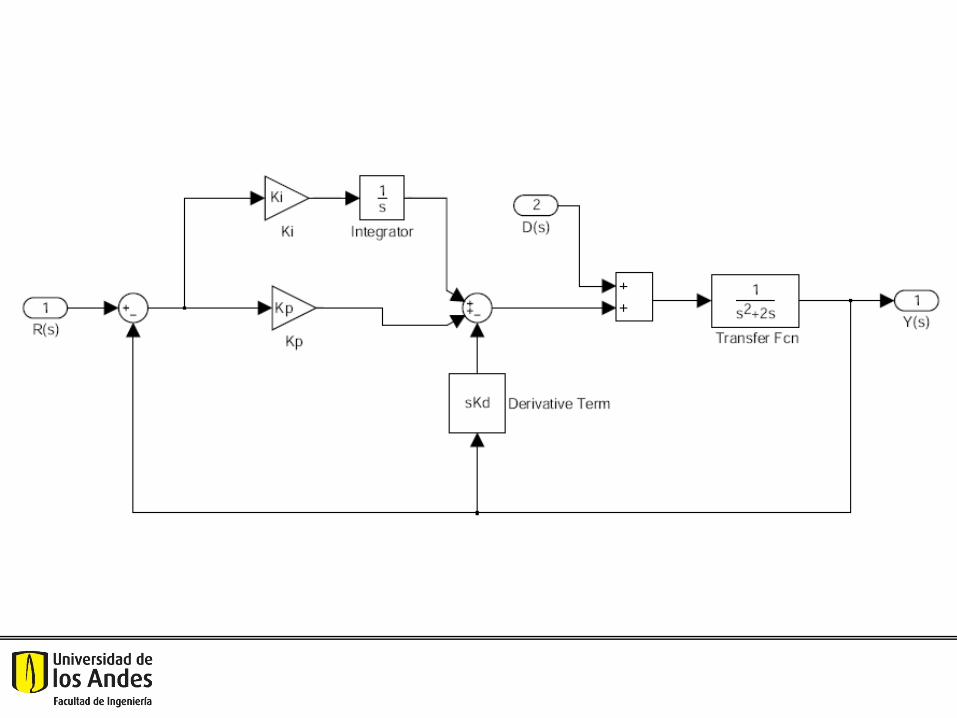
Ejemplos

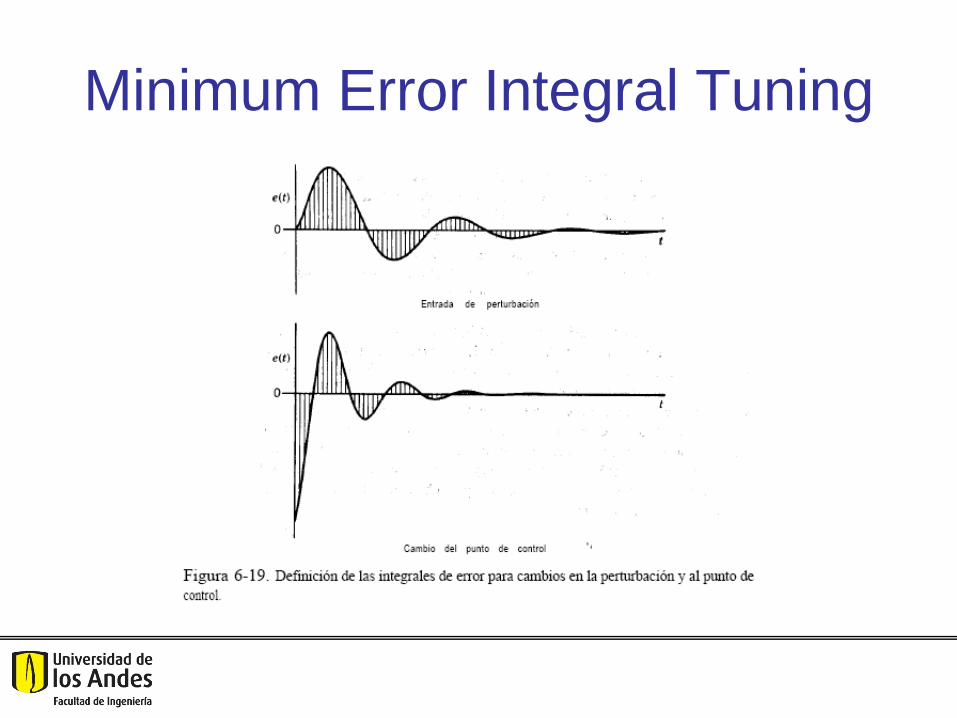
Criterios de Desempeño
Desempeño de la integral de tiempo.
Minimizar una función que contenga la
integral del error
Criterios de Desempeño
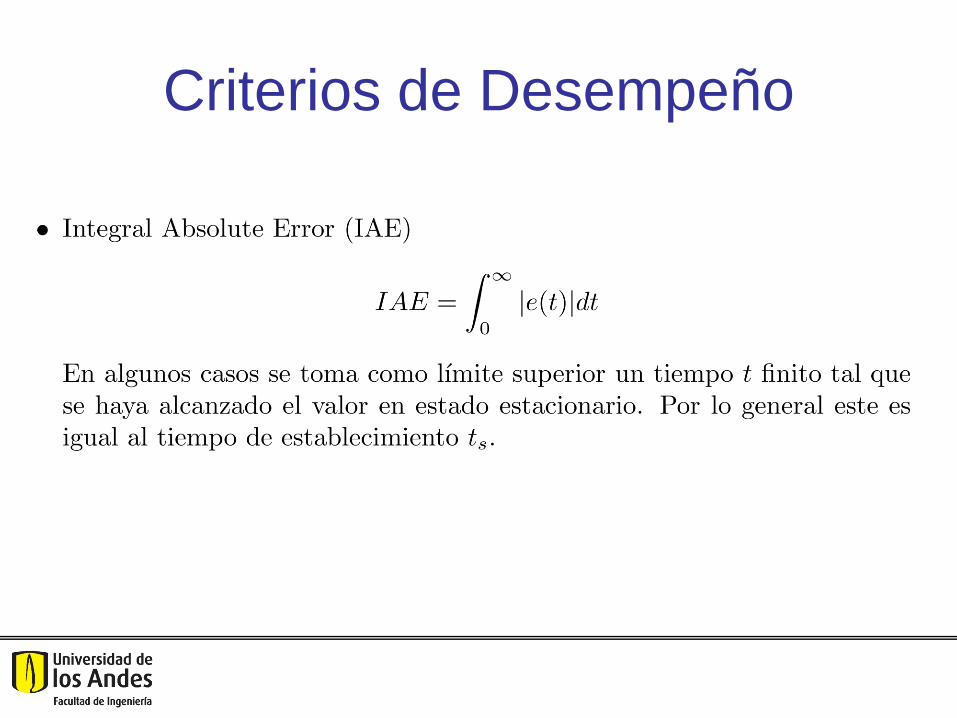
Criterios de Desempeño
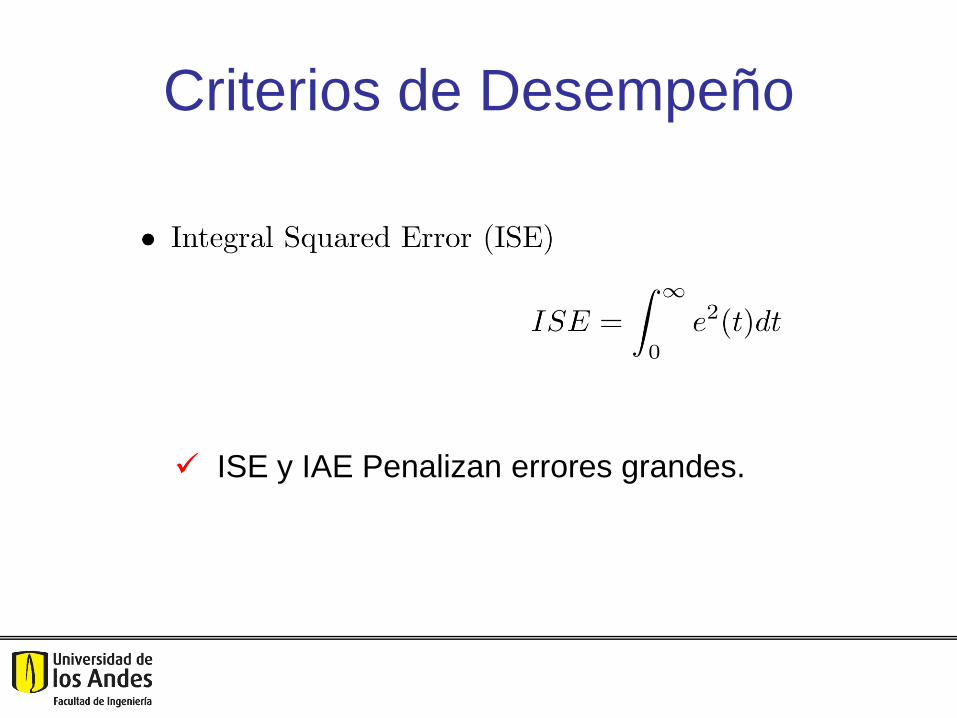
Criterios de Desempeño
ISE y IAE Penalizan errores grandes.
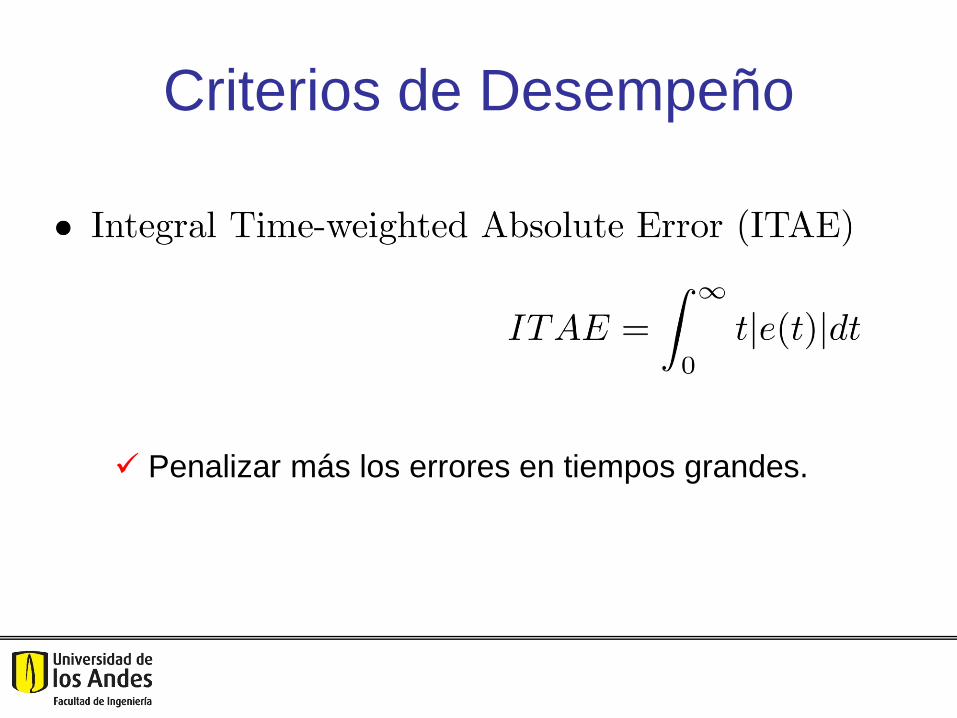
Criterios de Desempeño
Penalizar más los errores en tiempos grandes.
Criterios de Desempeño
Penalizar errores grandes en tiempos largos.
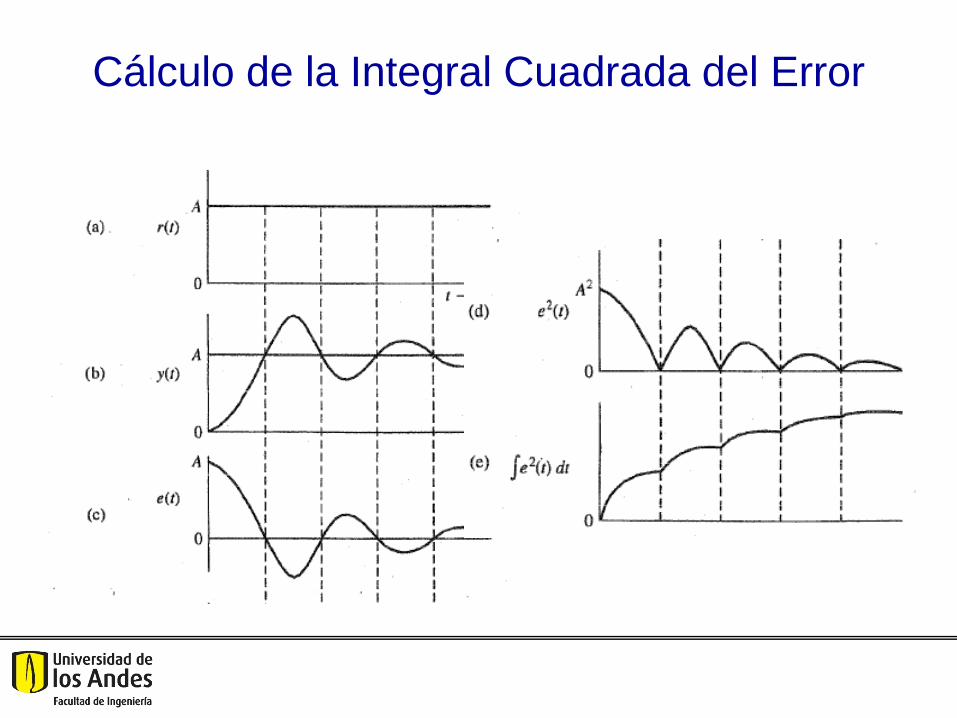
Cálculo de la Integral Cuadrada del Error
En general…
No necesariamente tendrá que ser el error, sino una
combinación de cualquiera de las señales que se
tengan a disposición.
Minimum Error Integral Tuning
• Método basado por Murrill-Smith.
• Se utiliza el modelo de primer orden más tiempo
muerto para caracterizar el proceso.
• La especificación de la respuesta en malla
cerrada es básicamente una minimización del
error o la desviación de la variable controlada
con respecto al set-point.
• Como el error es una función del tiempo, la
suma del error a cada instante de tiempo
debería minimizarse.
Minimum Error Integral Tuning
Minimum Error Integral Tuning
• En este caso, se quiere obtener una serie
de relaciones para sintonizar
controladores basados en la minimización
de la integral del error.
• Se utiliza el criterio de desempeño IAE.
• Existen otras formulaciones para sintonía
ISE, ITAE ITSE.
Minimum Error Integral Tuning
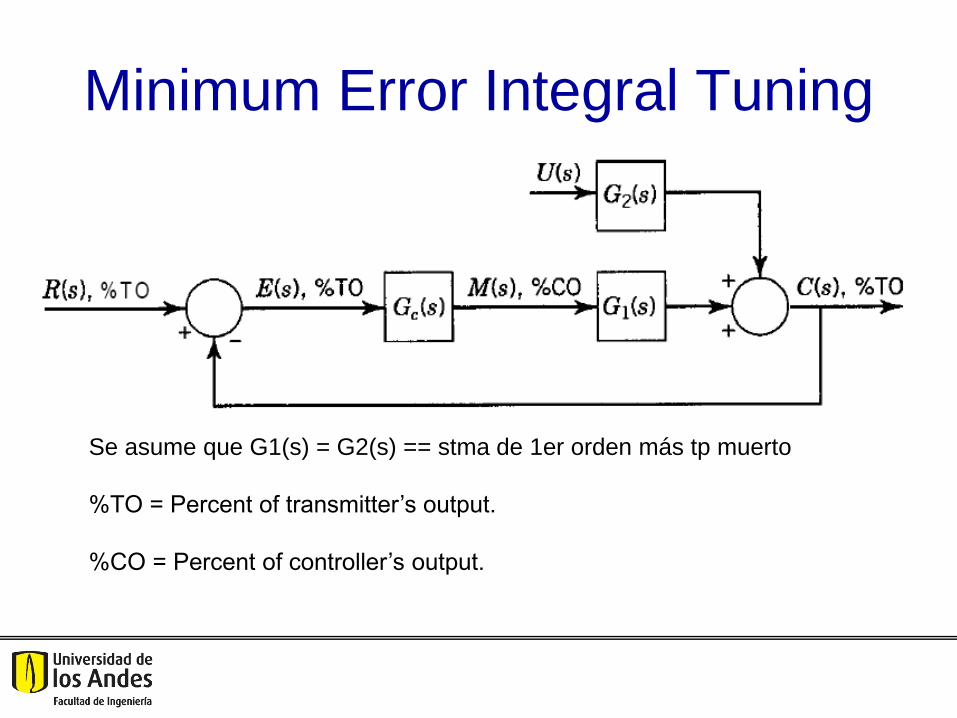
Se asume que G1(s) = G2(s) == stma de 1er orden más tp muerto
%TO = Percent of transmitter’s output.
%CO = Percent of controller’s output.
Minimum Error Integral Tuning
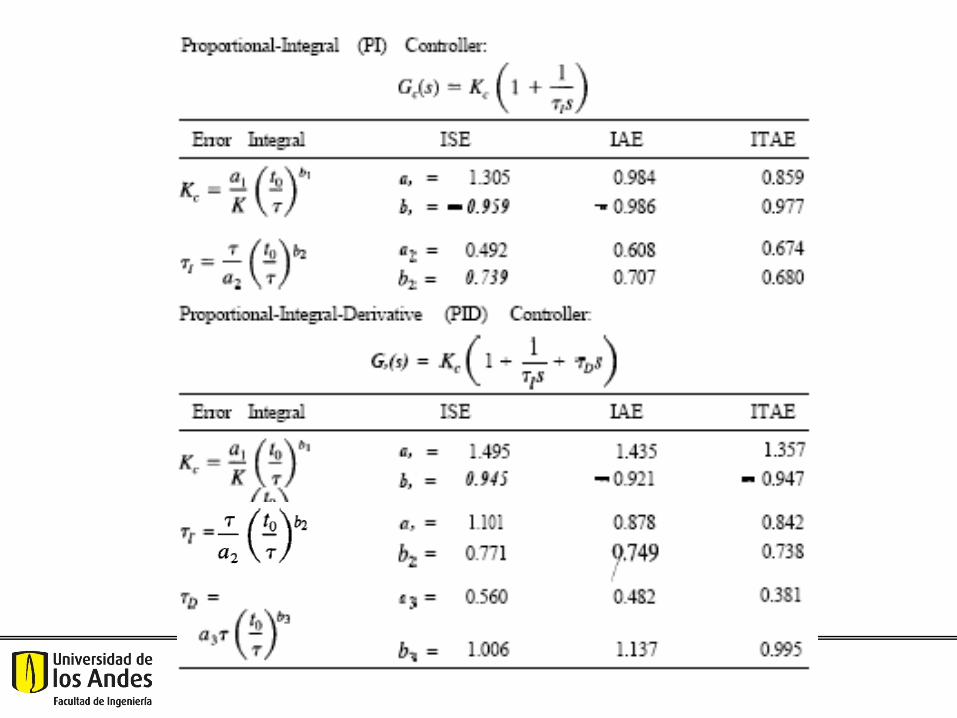
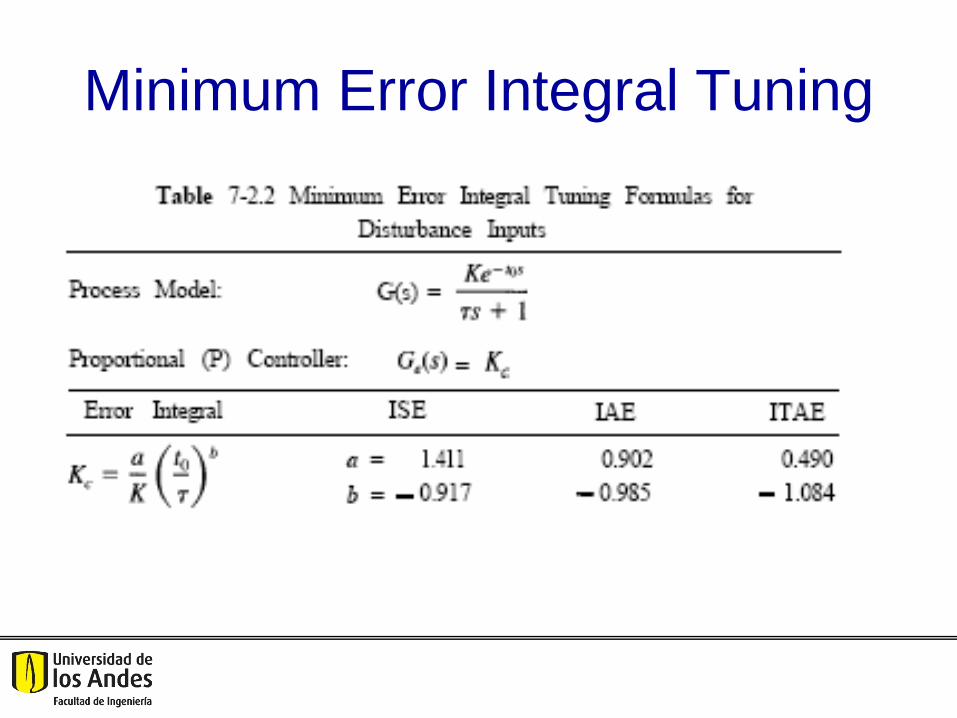
• Estas fórmulas tienen una tendencia similar a
las de ¼ de caída, excepto que el tiempo
integral depende más de la constante de tiempo
efectiva del proceso, y menos del tiempo
muerto.
• Fórmulas empíricas que NO deben extrapolarse
más allá del rango
0.1 <= to/tau <= 1
• Como en el caso de caída de ¼ estas fórmulas
predicen que Kc y Ti tienden al infinito a medida
que el proceso se aproxima a uno de primer
orden sin tiempo muerto (típico sintonización
con respecto a perturbación)
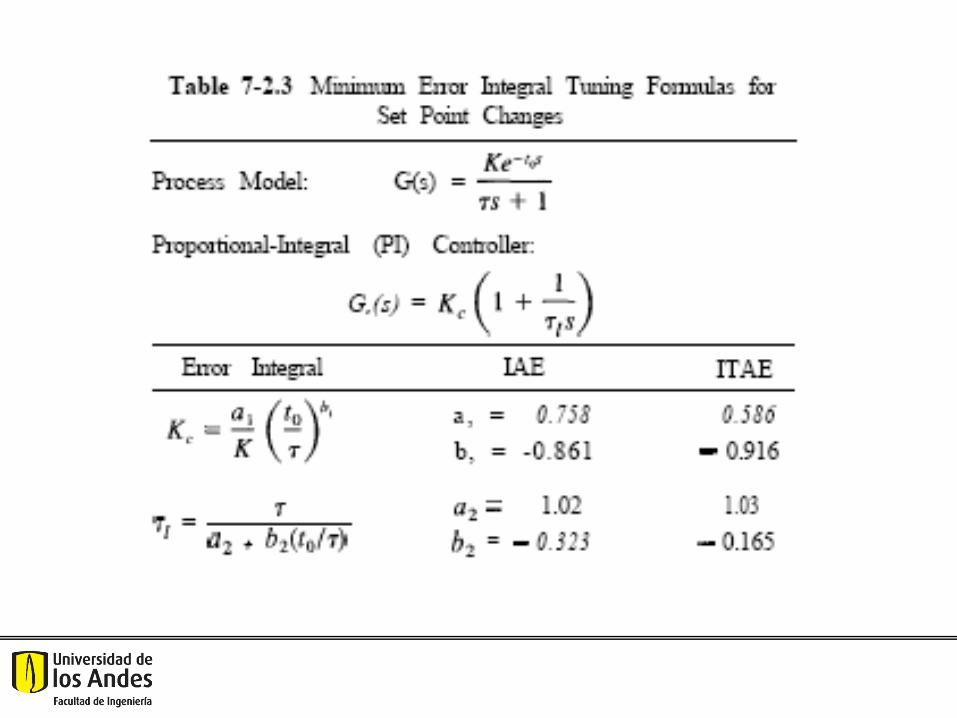
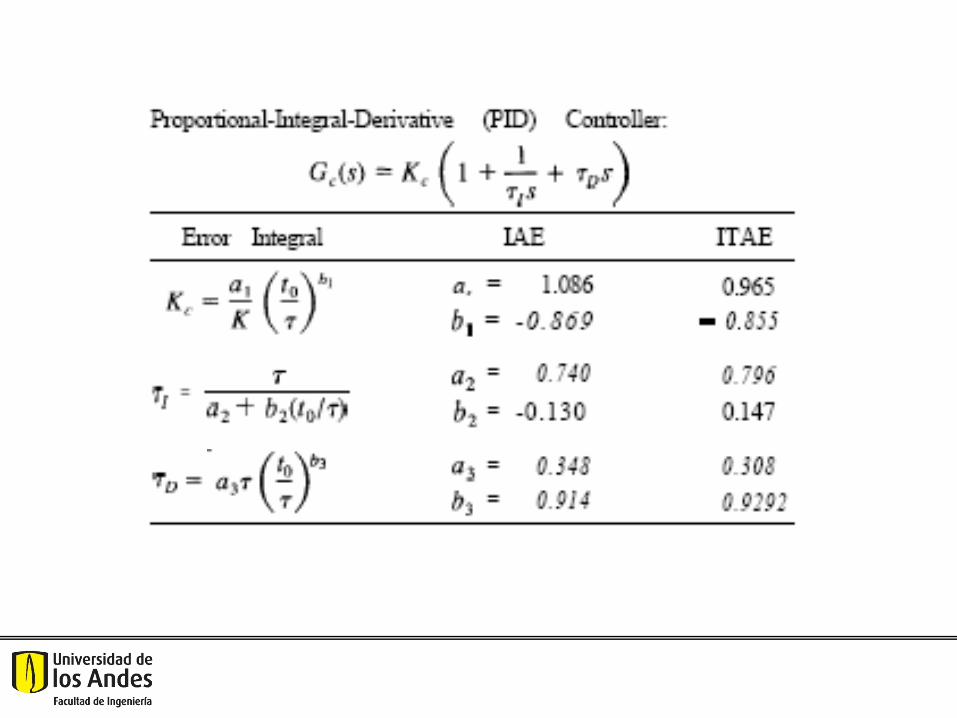
• Rovira dedujo estas relaciones a cambio de set-
point.
• El afirma que criterios de min error integral no
son apropiados para aplicaciones en las que
una acción proporcional sea la ideal.
• Fórmulas empíricas que NO deben extrapolarse
más allá del rango
0.1 <= to/tau <= 1
• Como en el caso de caída de ¼ estas fórmulas
predicen que Kc y Ti tienden al infinito a medida
que el proceso se aproxima a uno de primer
orden sin tiempo muerto (típico sintonización
con respecto a perturbación)











![Developmental Milestones and the EYLF and NQS [5.2 MB]](https://img.pdfslide.net/doc/110x75/589ee32c1a28ab2b4a8c0d05/developmental-milestones-and-the-eylf-and-nqs-52-mb.jpg)