Embed Size (px)
Citation preview

Prosiding Pertemuan I1miah Nasional Rekayasa Perangkat NuklirSerpong, 20 Nopember 2007
ISSN 1693-3346
FUNGSI TRANSFER SISTIM KONTROL TEMPERA TUR HEAT EXCHANGERMENGGUNAKAN MODEL UMPAN BALIK LOOP TUNGGAL
Oleh : Arjoni Amir - PRPN
ABSTRAK
FUNGSI TRANSFER SISTIM KONTROL TEMPERA TUR HEAT EXCHANGER
MENGGUNA KAN UMP AN BALIK LOOP TUNGGAL. Tulisan ini menguraikan bagan
/ sketsa aplikasi sistim kontrol kedalam persamaan-persamaan fungsi transfer. Komponen
- komponen yang terdapat dalam bagan aplikasi sistim kontrol tersebut diubah menjadi
blok diagram dalam persamaan domain s atau transformasi Laplace sehingga fungsi
transfer sinyal keluaran sistim kontrol temperatur heat exchanger dalam domain s atau
transformasi Laplace dapat ditentukan. Persamaan fungsi transfer ini diperlukan bila sistim
kontrol tersebut ingin dikembangkan lebih lanjut untuk kemudian dapat dilihat unjuk
kerjanya, kestabilannya dan parameter kontrol lainnya.
kata kunci : fungsi transfer, sistim kontrol, heat exchanger, diagram blok.
ABSTRACT
TRANSFER FUNCTION OF SYSTEM CONTROL TEMPERATURE FOR HEAT
EXCHANGER USING SINGLE LOOP FEEDBACK. This article analyses the schematic
for application of control systems by transfer function. All components in the control
system application schematic are turned into diagram blocks chaaracterizing by equation in
s domain or Laplace transformaton. This article determines the transfer function of a
control system temperature heat exchanger in s domain or Laplace transformation. The
equation of this transfer function is needed when the control system will be further
developed performance, stability and other control parametric evaluation.
keywords: transfer function, control system, heat exchanger, block diagram.
25
Prosiding Pertemuan I1miah Nasional Rekayasa Perangkat NuklirSerpong, 20 Nopember 2007
1. LATAR BELAKANG
ISSN 1693-3346
Sebuah bagan / sketsa proses kontrol terdapat dalam dokumen Piping dan Diagram
Instrumentasi (Piping and Instrumentation Diagram, P and ID) sebagai sebuah gambar
aplikasi sistim kontrol [I]. Untuk memahami gambar sistim kontrol umpan balik loop
tunggal tersebut maka sistim kontrol tersebut diuraikan menjadi komponen - komponen
dalam bent uk diagram blok dan persamaan transformasi Laplace atau fungsi transfer
dalam domain s, kemudian ditentukan persamaan sinyal keluaran [2,3].
2. TEORI
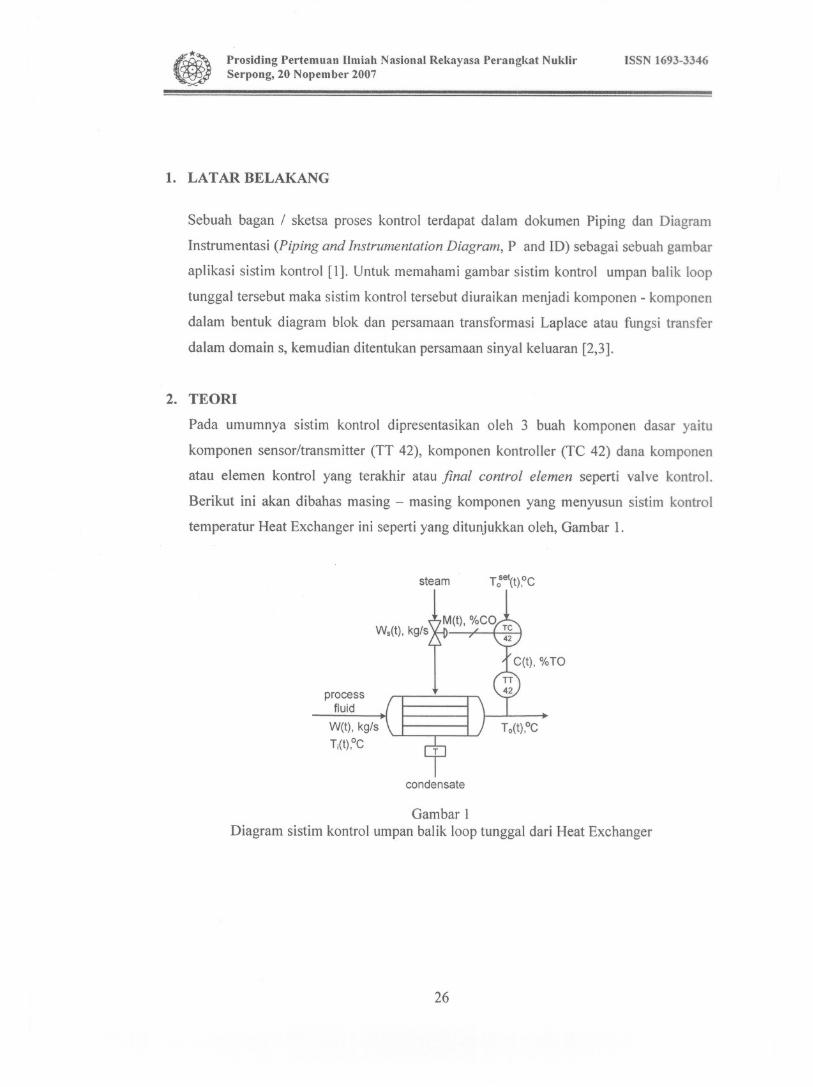
Pada umumnya sistim kontrol dipresentasikan oleh 3 buah komponen dasar yaitu
komponen sensor/transmitter (TT 42), komponen kontroller (TC 42) dana komponen
atau elemen kontrol yang terakhir atau final control elemen seperti valve kontrol.
Berikut ini akan dibahas masing - masing komponen yang menyusun sistim kontrol
temperatur Heat Exchanger ini seperti yang ditunjukkan oleh, Gambar 1.
processfluid
W(t), kg/s
T;(t),OC
condensate
Gambar 1
Diagram sistim kontrol umpan balik loop tunggal dari Heat Exchanger
26

Prosiding Pertemuan I1miah Nasional Rekayasa Perangkat NuklirSerpong, 20 Nopember 2007
2.1 Fungsi Transfer Komponen Sensor / Transmitter
ISSN 1693-3346
Sensor menghasilkan sebuah fenomena mekanik dan listrik yang berkaitan dengan
variabel proses pada saat dilakukan pengambilan data atau pengukuran. Transmitter
mengubah fenomena ini menjadi bentuk sebuah sinyal tertentu yang dapat
ditransmisikan C(t). Tujuan gabungan antara komponen sensor dan komponen
transmitter adalah menghasilkan sebuah sinyal keluaran transmitter TO(s) atau
transmitter output yang berhubunganan dengan variabel proses PV(s), dimana diagram
blok transfer fungsinya ditunjukan oleh Gambar 2.
H(s)PV(s) •variabel
I Iproses
TO(s)-..Keluaran
transmitter
Gambar 2.
Diagram fungsi transfer komponen sensor / transmitter.
ldealnya hubungan sinyal sensor / transmitter ini adalah linear yaitu sinyal keluaran
transmitter berbanding lurus dengan variabel proses seperti sensor/transmitter tekanan
(pressure), level dan temperatur seperti komponen RTD. Ada juga sensor / temperatur
yang tidak berbanding lurus (non linear) dengan variabel proses seperti sensor /
transmitter thermocouple dan orifice flowmeter. Kombinasi sensor / transmitter
mempunyai fungsi transfer dalam bentuk transformasi Laplace yang dinyatakan oleh
persamaan yang paling simpel yaitu orde satu sebagai berikut,
H(s) = TO(s) = KT
P V (s) ~
dimana
K T = penguatan sensor / transm itter
t T = waktu konstan sensor / transmitter
27
(1)

Prosiding Pertemuan [lmiah Nasional Rekayasa Perangkat NuklirSerpong, 20 Nopember 2007
2.2 Fungsi Transfer Komponen Kontrol (Controller)
ISSN 1693-3346
Controller merupakan otak dari sistim kontrol loop. Bagian ini merupakan proses
keputusan didalam sistim kontroI. Gambar 3 memberikan diagram dimana komponen
kontrol memberikan selisih sinyal proses yang diterima atau variabel yang dikontrol
dengan sinyal setpoint / referensi R(s). Kemudian sinyal keluaran tersebut dikirimkan
ke kontrol valve untuk menjaga sinyal variabel yang dikontrol sesuai dengan sinyal
setpointnya. Perbedaan antara setpoint dengan variabel yang dikontrol disebut error
E(s) yang dinyatakan dalam persamaan transformasi Laplace sebagai berikut,
E(s) = R(s)- C(s) (2)
dimana,
E(s) = sinyal error, %TO
R(s) = sinyal setpoint, %TO
C(s) = variabel yang dikontrol diberikan oleh keluaran transmitter dalam satuan
%TO.
R(s), %TO +
C(S), %TO
M(s), %CO
Gambar 3
Diagram fungsi transfer komponen control
Sebagai contoh persamaan fungsi transfer untuk proportional controller (P) dalam bentuk
transformasi Laplace sebagai berikut,
M(s) = KG,.(s) = E(s) C
28
(3)

Prosiding Pertemuan IImiah Nasional Rekayasa Perangkat NuklirSerpong, 20 Nopember 2007
dimana
Kc = penguatan proportional controller, % CO / % TO
M(s)= sinyal keluaran controller, % CO
E(s) = sinyal error, % TO
2.3. Fungsi Transfer Komponen Control Valve
ISSN 1693-3346
Komponen kontrol valve sering disebut komponen atau elemen kontrol terakhir yang
mengatur aliran steam. Gambar 4 menunjukan diagram fungsi transfer kontrol valve
dengan persamaan transformasi Laplace sebagai berikut,
Gv(s) = F(s) = KvM(s) t vs + 1
dimana,
Kv = penguatan kontrol valve, gpm / % CO
tv = waktu konstan control valve
(4)
Persamaan diatas dengan asumsi presure drop pada kontrol valve adalah konstan.
M(s), %CO... Gv(s)
F(s), gpm•••
Gambar 4
Diagram fungsi transfer komponen kontrol valve
29

Prosiding Pertemuan I1miah Nasional Rekayasa Perangkat NuklirSerpong, 20 Nopember 2007
2.4 Fungsi Transfer Komponen Heat Exchanger
W(s),kg/s
W,(s),kg/s
Gambar 5
Diagram fungsi transfer komponen heat exchanger
ISSN 1693-3346
Gambar 5 merupakan blok diagram heat exchanger yang diwakili oleh 3 buah blok
yang masing - masing mempunyai satu masukan yaitu blok aliran proses W(s), aliran
steam Ws(s), temperatur inlet Ti(S);' Sedangkan fungsi transfer dalam bentuk
transformasi Laplace diberikan oleh persamaan sebagai berikut,
T (s) °cG = -"- --
• w (s) , kg / s
T (s) °cG = _0_,__
, w,(s) kg/ s
T (s) "C
Gr = TO(s) , °CI
dimana,
To(s) = sinyal keluaran temperatur Heat Exchanger
G. = transfer fungsi aliran proses
Gs = transfer fungsi aliran steam
Gr = transfer fungsi temperatur inlet
3. PEMBAHASAN
(5)
3.1 Fungsi Transfer Kontrol Umpan Balik (Feedback Control Loop)
Untuk mereview konsep sistim kontrol umpan balik, perhatikan Gambar 1 diatas yang
mewakili sket heat exchanger. Bagan diatas mempunyai tujuan utama menjaga
temperatur keluaran aliran proses To(t) sesuai dengan nilai yang diinginkan atau
30

Prosiding Pertemuan IImiah Nasional Rekayasa Perangkat NuklirSerpong, 20 Nopember 2007
ISSN 1693-3346
setpoint yang diberikan Tose\t) dari pengaruh aliran cairan proses Wet) atau temperatur
inlet Tj(t). Dengan memilih aliran steam sebagai variabel yang bisa diatur untuk
mengontrol temperatur keluaran maka sejumlah energi yang diberikan oleh aliran
cairan proporsional terhadap aliran steam.
Sedangkan kontrol umpan balik bekerja sebagai berikut, sebuah sensor/ transmitter (IT
42) mengukur temperatur keluaran heat exchanger atau variabel control To(t)
kemudian sensor / transmitter mengeluarkan sinyal C(t) berbanding lurus dengan To(t)
dan sinyal tersebut diteruskan ke controller (TC 42) dimana sinyal ini dibandingkan
dengan sinyal setpoint Toset . Komponen controlIer kemudian menghitung sinyal
keluaran atau disebut juga dengan sinyal manipulated variable (MV) atau M(t) yaitu
perbedaan atau selisih antara nilai sinyal pengukuran C(t) dengan nilai sinyal setpoint
Toset(t) sinyal M(t) tersebut mengatur % pembukaan kontrol valve, proses kontrol
umpan balik tersebut diatas diberikan oleh Gambar 6.
He a t
excganger
W(S~IGw(S~kg Is
T .(sf, C
C (s).% TOH (s)
Sensorltransmitter
Gambar 6
Diagram blok loop kontrol umpan balik temperatur Heat Exchanger.
Dalam gambar 6 terdapat sebuah sinyal temperatur keluaran To(s) dan dua buah sinyal
masukan yaitu sinyal masukan setpoint Toset(s) dan sinyal masukan aliran proses W(s)
yang diasumsikan sebagai sinyal gangguan. Sinyal masukan temperatur inlet Ti(S) bisa
diabaikan karena sinyal tersebut dianggap konstan. Persamaan - persamaan yang
terdapat dalam gambar 6 sebagai berikut,
31

Prosiding Pertemuan Ilmiah Nasional Rekayasa Perangkat NuklirSerpong, 20 Nopember 2007
ISSN 1693-3346
M(s) = Gc(s)E(s)
w.cs) = Gv(s)M(s)
C(s) = H(s)To(s)
(6)
(7)
(8)
(9)
(10)
Bila diasumsikan nilai setpoint tidak berubah Toset(s) = 0, maka persamaan sinyal
temperatur keluaran sebagai berikut,
Untuk fungsi transfer loop tertutup antara temperatur keluaran To(s) dan aliran proses
dan W(s) sebagai berikut,
T (s)_0_=w(s)
Gw (s)
1 + H(s)Gs(s)Gv(s)GJs)(12)
Bila diasumsikan nilai aliran proses W(s) = 0 maka untuk fungsi transfer loop tertutup
antara temperatur keluaran To(s) dan setpoint Toset(s)sebagai berikut,
TO<s) = KsPs(s)Gv(s)Gc(s)
T;e/(s) 1 + H(s)G,{s)Gv(s)Gc(s)(13)
Persamaa (11) dan (12) mempunyai persamaan denominator yang sarna untuk kedua
masukan, sedangkan untuk numerator memiliki persamaan yang berbeda. Loop tunggal
ditunjukan oleh persamaan denominator.
Gambar 6 juga dapat disederhanakan dengan mengikuti hukum aljabar untuk diagram
blok sehingga menghasilkan diagram blok yang baru seperti Gambar 7 [2].
32

Prosiding Pertemuan IImiah Nasional Rekayasa Perangkat NuklirSerpong, 20 Nopember 2007
ISSN 1693-3346
Gambar 7
Diagram blok loop kontrol umpan balik temperatur Heat Exchanger yang disederhanakan(unity feedback loop).
Gambar 7 memberikan penguatan umpan balik unity sehingga diagram ini juga disebut
unity feedback loop dengan transfer fungsi sinyal keluaran loop tertutup C(s) adalah
sebagai berikut,
dimana,
G,(s) = Gv(s'P,(s)H(s)
G2(s) = G)s)H(s)
dimana R(s) adalah sinyal referensi atau setpoint dalam % TO dan W(s) adalah sinyal
aliran proses yang masuk kedalam heat exchanger dalam lb/min.
33

Prosiding Pertemuan IImiah Nasional Rekayasa Pera,lgkat NuklirSerpong, 20 Nopember2007
KESIMPULAN
ISSN 1693-3346
Dalam menganalisis sebuah bagan aplikasi sistim kontrol atau membuat konversi bagan
aplikasi sistim kontrol dari gambar piping dan diagram instrumentasi (P & 10) menjadi
diagram blok persamaan transfer fungsi maka diperlukan rangkaian / blok diagram
pengganti setiap komponen dalam domain s atau dalam bentuk transformasi Laplace.
Sinyal keluaran transmitter C(s) setelah melalui beberapa asumsi diperoleh persamaan
(14) yang disederhanakan. Persamaan (13) ini dapat dikembangkan dan disimulasikan
kalau seluruh nilai daTi fungsi transfer Gs(s), Gis), Ge(s), sinyal referensi R(s) dan aliran
proses W(s) diketahui nilainya.
DAFT AR PUST AKA
1. "Piping Designfor Process Plants". 1963. Howard F. Rase. John Wiley and Sons,Inc, USA.
2."Principles and Practice of Automatic Process Controf'. 1977. Carlos A. Smith,Armando B. Corripio John Wiley and Sons, Inc., Canada.
3."Modern Control Engineering". 1977, Prentice Hall, Inc,USA.
4."Control Valve Hanbook." 1977. Marshalltowmn, Iowa: Fisher Controls Co.
5."Masoneilan Handbookfor Control Valve Sizing."Norwood, Mass; MasoneilanInternasional,Inc.
6. "Fisher Catalog 10." 1976. Mashaltown, Iowa: Fisher Controls Co.
34