Embed Size (px)
Citation preview
This article was downloaded by: [University of Nebraska, Lincoln]On: 18 October 2014, At: 01:31Publisher: Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registered office: MortimerHouse, 37-41 Mortimer Street, London W1T 3JH, UK
Geocarto InternationalPublication details, including instructions for authors and subscription information:http://www.tandfonline.com/loi/tgei20
Fuzzy Neural Network Models for SupervisedClassification: Multispectral Image AnalysisArun D. Kulkarni a & Kamlesh Lulla ba Computer Science Department , The University of Texas at Tyler , TX, 75799, USAb Office of Earth Sciences , NASA / Johnson Space Center , Houston, TX, 77058, USAPublished online: 02 Jan 2008.
To cite this article: Arun D. Kulkarni & Kamlesh Lulla (1999) Fuzzy Neural Network Models for Supervised Classification:Multispectral Image Analysis, Geocarto International, 14:4, 42-51, DOI: 10.1080/10106049908542127
To link to this article: http://dx.doi.org/10.1080/10106049908542127
PLEASE SCROLL DOWN FOR ARTICLE
Taylor & Francis makes every effort to ensure the accuracy of all the information (the “Content”) containedin the publications on our platform. However, Taylor & Francis, our agents, and our licensors make norepresentations or warranties whatsoever as to the accuracy, completeness, or suitability for any purpose ofthe Content. Any opinions and views expressed in this publication are the opinions and views of the authors,and are not the views of or endorsed by Taylor & Francis. The accuracy of the Content should not be reliedupon and should be independently verified with primary sources of information. Taylor and Francis shallnot be liable for any losses, actions, claims, proceedings, demands, costs, expenses, damages, and otherliabilities whatsoever or howsoever caused arising directly or indirectly in connection with, in relation to orarising out of the use of the Content.
This article may be used for research, teaching, and private study purposes. Any substantial or systematicreproduction, redistribution, reselling, loan, sub-licensing, systematic supply, or distribution in anyform to anyone is expressly forbidden. Terms & Conditions of access and use can be found at http://www.tandfonline.com/page/terms-and-conditions

42 Geocarto International, Vol. 14, No. 4, December 1999Published by Geocarto International Centre, G.P.O. Box 4122, Hong Kong.
Fuzzy Neural Network Models for Supervised Classification:Multispectral Image Analysis
Arun D. KulkarniComputer Science Department, The University of Texas at TylerTX 75799, USA
Kamlesh LullaOffice of Earth SciencesNASA / Johnson Space CenterHouston, TX 77058, USA
Abstract
It has been well established that neural networks provide a reasonable and powerful alternative to conventionalclassifiers. During the past few years there has been a large and energetic upswing in research efforts aimed atsynthesizing fuzzy logic with neural networks. This combination of fuzzy logic and neural networks seems naturalbecause two approaches generally attack the design of “intelligent” systems from quite different angles. Neuralnetworks provide algorithms for learning, classification, and optimization whereas fuzzy logic deals with issuessuch as reasoning on a higher (semantic or linguistic) level. Consequently the two technologies complement eachother. In this paper we propose two novel fuzzy-neural network models for supervised learning. The first modelconsists of three layers, and the second model consists of four layers. In both models, the first two layers implementfuzzy membership functions and the remaining layers implement the inference engine. Both models use the gradientdecent technique for learning. As an illustration, we have analyzed two Thematic mapper images using thesemodels. Results are presented in the paper.
Introduction
Neural networks provide algorithms for optimization,classification, and clustering, whereas fuzzy logic is a toolfor representing and utilizing data and information thatpossesses non-statistical uncertainty. Neural networks aresuitable when the system learns from sample data points,whereas fuzzy logic techniques are more appropriate whenclassification rules are obtained from experts’ knowledge.Neural networks with learning algorithms such asbackpropagation can learn from examples, and are suitablefor supervised classification. Self organizing networks withlearning algorithms such as competitive learning canimplement clustering, and are suitable for unsupervisedclassification. Fuzzy sets which allow partial membershipwere introduced by Zadeh (1965). Fuzzy logic techniquesin the form of approximate reasoning provide decisionsupport and expert systems with powerful reasoningcapabilities. The permissiveness of the human thoughtprocess suggests that much of the logic behind humanreasoning is not traditional two valued or even multi-valued logic, but logic with fuzzy truths, fuzzy connectives,and fuzzy rules of inference (Zadeh, 1973). The exploitationof tolerance for imprecision and uncertainty underlies theremarkable human ability to understand distorted speech,
decipher sloppy handwriting, comprehend nuances of naturallanguage, summarize text, recognize and classify imagesand more generally, make rational decisions in anenvironment of uncertainty and imprecision (Zadeh, 1994).Fuzzy logic provides a tool to explore imprecision in decisionmaking. During the past decade fuzzy logic has found avariety of applications in pattern recognition. With a fuzzylogic decision system, decision rules can be specified interms of linguistic variables. Recently, many hybrid systemsthat combine neural networks and fuzzy logic techniqueshave been reported in the literature (Lee, 1990; Lin and lee,1991; Berenji and Khedkar, 1992)
There are many ways to synthesize fuzzy logic andneural networks. The first approach is to use input-outputsignals and/or weights in a neural network as fuzzy setsalong with fuzzy neurons (Buckley and Hayashi, 1994).Several authors have proposed models for fuzzy neurons(Gupta, 1994). The second approach is to use fuzzymembership functions to pre-process or post-process datawith neural network models (Lin and Lee, 1994; Horikawaet al., 1992; Takagi and Hayashi, 1991, Pal and Mitra,1992). The third approach to combine neural networks withfuzzy logic is to build a classifier with multiple stages andhave some stages implemented with neural networks andsome with knowledge based fuzzy decision systems. Yetanother way to combine neural networks with fuzzy logic is
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ebra
ska,
Lin
coln
] at
01:
31 1
8 O
ctob
er 2
014
43
to use fuzzy associative memories (FAMs). In a simpleimplementation, FAM is a fuzzy logic rule with an associatedweight. A mathematical frame work exists that can mapFAM to a neural network, with which a fuzzy logic decisionsystem can be built using a backpropagation learningalgorithm (Kosko, 1992).
Many fuzzy neural networks models that use fuzzymembership functions for preprocessing have beendeveloped. Lin and Lee (1991) have suggested a generalneural network model for a fuzzy logic control and decisionsystem. Their model consists of five layers. Nodes at layerone are input nodes (linguistic nodes) which represent inputlinguistic variables. Nodes at layers two and four are termnodes which act as membership functions to representterms of the respective linguistic variable. Nodes in layerthree represent fuzzy rules. They have used a two phaselearning scheme. In phase one, they use a self organizedlearning scheme to locate initial membership functions andto find the presence of a rule. In phase two they use asupervised learning scheme to optimally adjust themembership functions for desired output. Horikawa et al.(1992) have proposed three types of fuzzy neural networkmodels. They have used sigmoid fuzzy membershipfunctions. In their model the first five layers correspond topremise part of a fuzzy rule. Weights connecting theseunits represent the center central position and gradient ofthe sigmoid function. They have categorized their modelsin three types depending upon the consequent part of themodel. The premise part or the first five layers are same forall the three types of models. The consequent part changesin three types. The consequent part can be a constant, firstorder equation or a fuzzy variable. Takagi and Hayashi(1991) have proposed a model for neural network drivenfuzzy reasoning. The first step in their model is determinationof fuzzy inference rules. They use a clustering technique togroup data. The second step deals with attribution of arbitraryinput for each rule. Pal and Mitra (1992) have developed afuzzy neural network model that uses a backpropagationlearning algorithm. They have used the model to classifyIndian Telgu vowels sounds. They have also suggested amethod for extracting rules with a fuzzy neural networkmodel (Mitra and Pal, 1992). Jang (1993, 1995) presents anadaptive network model for a fuzzy inference system. Themodel represents adaptive network-based fuzzy inferencesystems (ANFIS). The ANFIS model is a generic model,and neural networks and fuzzy inference systems can beconsidered as special instants of an adaptive network whenproper node functions are assigned.
In this paper, we propose two novel fuzzy-neural networkmodels for supervised classification. The first model consistsof three layers and the second model consists of four layers.The first two layers in both models implement fuzzymembership functions whereas the remaining layersimplement the inference engine. We have analyzedmultispectral images using both the models. In thesubsequent sections, we discuss fuzzy inference systems,neural networks, fuzzy-neural network models, and usethese models for multispectral image analysis.
Fuzzy Inference Systems
Fuzzy inference systems are used in many decisionmaking or classification applications (Cox, 1994; Kulkarniet al., 1994). Fuzzy set theory is an extension of crisp settheory. It is extended to handle the concept of partial truthor partial membership. Zadeh (1975) described that thepresence or absence of an element x in a set A is given by itscharacteristic function µ
A(x) where µ
A(x) = 1 if x ∈ A,
and, µA(x) = 0 if x ∉ A. In fuzzy logic, the basic idea is that
membership values are indicated by a value in the range [0,1], with 0 representing total falseness and 1 representingtotal truth (Zadeh, 1975). A fuzzy set A in a universe ofdiscourse U is characterized by a membership function µ
A
which takes a value in the interval [0,1] that is µA → [0,1].
Thus a fuzzy set A in U may be represented by a pair. Eachpair consists of a generic element x and its grade ofmembership function, that is A = { (x, µ
A(x) ) | x ∈ U }, x is
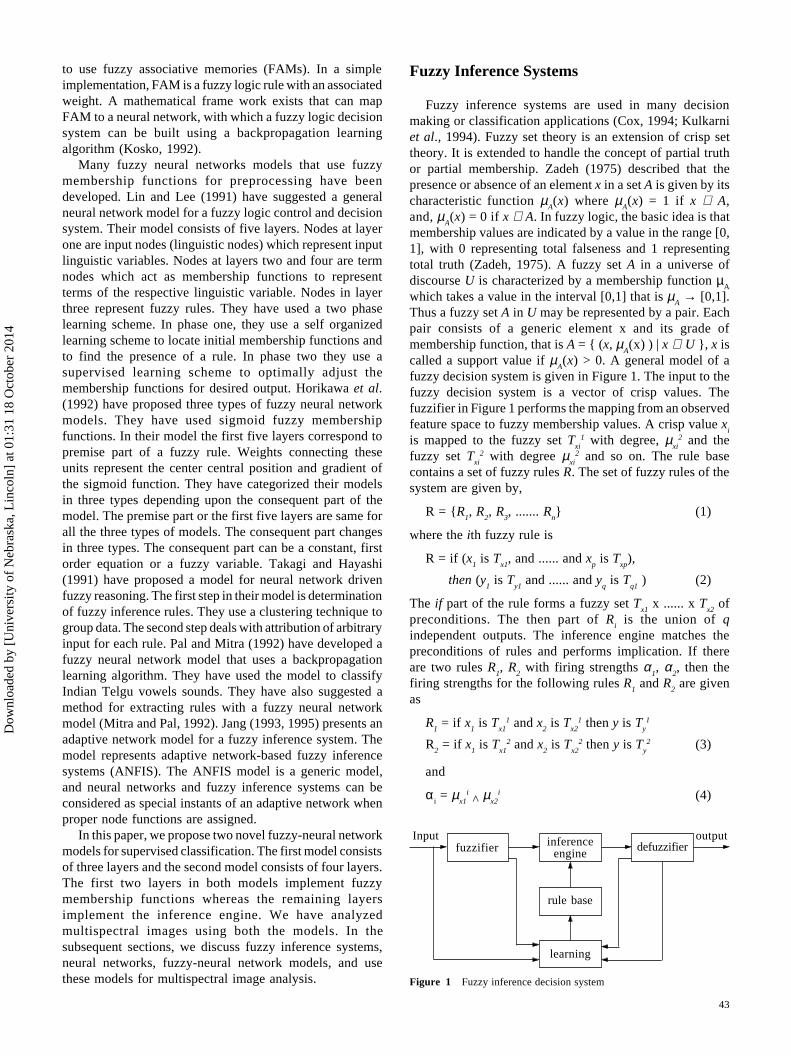
called a support value if µA(x) > 0. A general model of a
fuzzy decision system is given in Figure 1. The input to thefuzzy decision system is a vector of crisp values. Thefuzzifier in Figure 1 performs the mapping from an observedfeature space to fuzzy membership values. A crisp value x
i
is mapped to the fuzzy set Txi
1 with degree, µxi
2 and thefuzzy set T
xi2 with degree µ
xi2 and so on. The rule base
contains a set of fuzzy rules R. The set of fuzzy rules of thesystem are given by,
R = {R1, R
2, R
3, ....... R
n} (1)
where the ith fuzzy rule is
R = if (x1 is T
x1, and ...... and x
p is T
xp),
then (y1 is T
y1 and ...... and y
q is T
q1 ) (2)
The if part of the rule forms a fuzzy set Tx1 x ...... x T
x2 of
preconditions. The then part of Ri is the union of q
independent outputs. The inference engine matches thepreconditions of rules and performs implication. If thereare two rules R
1, R
2 with firing strengths α
1, α
2, then the
firing strengths for the following rules R1 and R
2 are given
as
R1 = if x
1 is T
x11 and x
2 is T
x21 then y is T
y1
R2 = if x
1 is T
x12 and x
2 is T
x22 then y is T
y2 (3)
and
αi = µ
x1i ^ µ
x2i (4)
Input outputdefuzzifierinference
enginefuzzifier
rule base
learning
Figure 1 Fuzzy inference decision system
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ebra
ska,
Lin
coln
] at
01:
31 1
8 O
ctob
er 2
014
44
where ̂ is the fuzzy and operator and is defined as
αi = min (µ
1i, µ
1i) (5)
The above two rules, R1 and R
2, lead to the corresponding
decision with membership function myi, i = 1, 2, which is
defined as
µyi = α
1 ^ µ
yi (6)
The output decision can be obtained by combining thetwo decisions
µy = µ
y1 ∨ µ
y2 (7)
where v is the fuzzy or operator, which is defined as,
µy = max (µ
y1, µ
y2) (8)
Equations (6) and (9) define the fuzzy operators AND andOR respectively.
The input for the defuzzification process is an aggregatedfuzzy set and the output is a single number. Thedefuzzification process helps to move out from a fuzzy setto a crisp value. The most popular method used fordefuzzification is the centriod method.
Neural Network Models
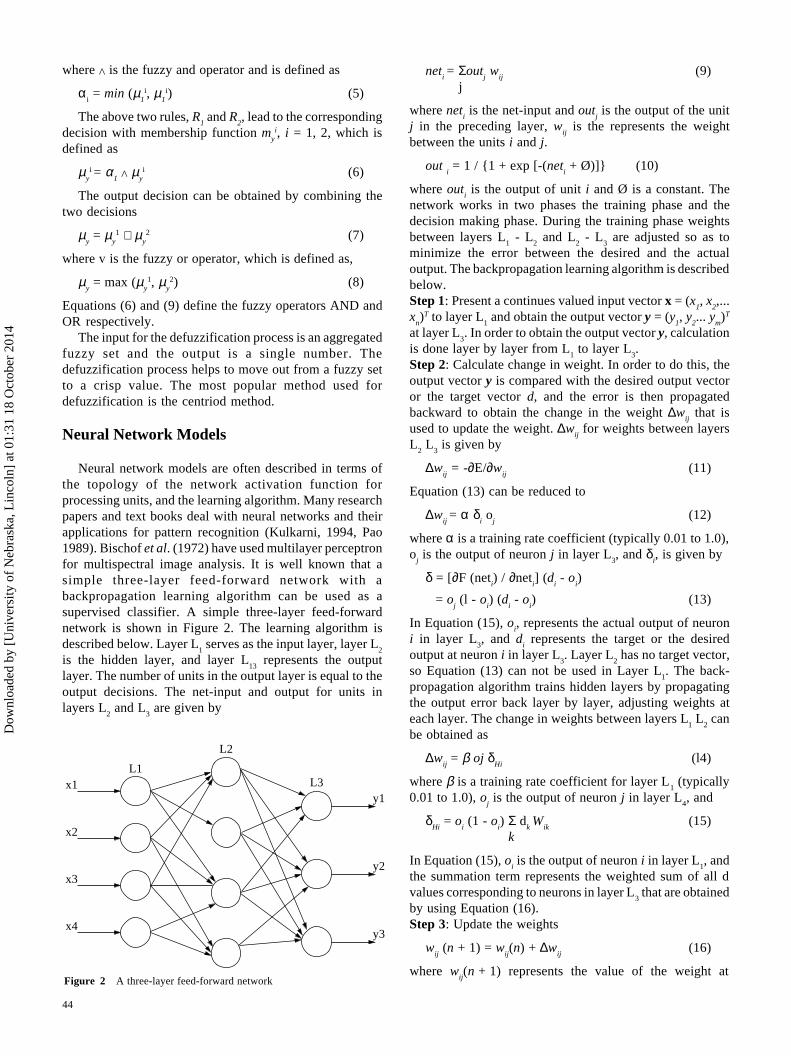
Neural network models are often described in terms ofthe topology of the network activation function forprocessing units, and the learning algorithm. Many researchpapers and text books deal with neural networks and theirapplications for pattern recognition (Kulkarni, 1994, Pao1989). Bischof et al. (1972) have used multilayer perceptronfor multispectral image analysis. It is well known that asimple three-layer feed-forward network with abackpropagation learning algorithm can be used as asupervised classifier. A simple three-layer feed-forwardnetwork is shown in Figure 2. The learning algorithm isdescribed below. Layer L
1 serves as the input layer, layer L
2
is the hidden layer, and layer L13
represents the outputlayer. The number of units in the output layer is equal to theoutput decisions. The net-input and output for units inlayers L
2 and L
3 are given by
neti = Σout
j w
ij(9)
j
where neti is the net-input and out
j is the output of the unit
j in the preceding layer, wij is the represents the weight
between the units i and j.
out i = 1 / {1 + exp [-(net
i + Ø)]} (10)
where outi is the output of unit i and Ø is a constant. The
network works in two phases the training phase and thedecision making phase. During the training phase weightsbetween layers L
1 - L
2 and L
2 - L
3 are adjusted so as to
minimize the error between the desired and the actualoutput. The backpropagation learning algorithm is describedbelow.Step 1: Present a continues valued input vector x = (x
1, x
2,...
xn)T to layer L
1 and obtain the output vector y = (y
1, y
2... y
m)T
at layer L3. In order to obtain the output vector y, calculation
is done layer by layer from L1 to layer L
3.
Step 2: Calculate change in weight. In order to do this, theoutput vector y is compared with the desired output vectoror the target vector d, and the error is then propagatedbackward to obtain the change in the weight ∆w
ij that is
used to update the weight. ∆wij for weights between layers
L2 L
3 is given by
∆wij = -∂E/∂w
ij(11)
Equation (13) can be reduced to
∆wij = α δ
i o
j(12)
where α is a training rate coefficient (typically 0.01 to 1.0),o
j is the output of neuron j in layer L
3, and δ
i, is given by
δ = [∂F (neti) / ∂net
i] (d
i - o
i)
= oj (l - o
i) (d
i - o
i) (13)
In Equation (15), oi, represents the actual output of neuron
i in layer L3, and d
i represents the target or the desired
output at neuron i in layer L3. Layer L
2 has no target vector,
so Equation (13) can not be used in Layer L1. The back-
propagation algorithm trains hidden layers by propagatingthe output error back layer by layer, adjusting weights ateach layer. The change in weights between layers L
1 L
2 can
be obtained as
∆wij = β oj δ
Hi(l4)
where β is a training rate coefficient for layer L1 (typically
0.01 to 1.0), oj is the output of neuron j in layer L
4, and
δHi
= oi (1 - o
i) Σ d
k W
ik(15)
k
In Equation (15), oi is the output of neuron i in layer L
1, and
the summation term represents the weighted sum of all dvalues corresponding to neurons in layer L
3 that are obtained
by using Equation (16).Step 3: Update the weights
wij (n + 1) = w
ij(n) + ∆w
ij(16)
where wij(n + 1) represents the value of the weight at
x1
x2
x3
x4
L1
L2
L3y1
y2
y3
Figure 2 A three-layer feed-forward network
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ebra
ska,
Lin
coln
] at
01:
31 1
8 O
ctob
er 2
014

45
iteration n+1 (after adjustment), and wij(n) represents the
value of the weight at iteration n.Step 4: Obtain error ε for neurons in layer L
3.
ε = Σ (oi - d
i)2 (17)
If the error e is greater than some minimum εmin
, thenrepeat Steps 2 through 4; otherwise terminate the trainingprocess.
Fuzzy-Neural Network Models
A model for a three-layer fuzzy-neural decision systemis shown in Figure 3. Each layer consists of a number ofsimple processing units. Layer L
1 is the input layer and
layer L2 performs the functions of the fuzzifier block shown
in Figure 1. Units in L2 may be compound units so as to
implement a desired membership function. We have chosenGaussian membership functions. However, membershipfunctions of other shapes such as triangular or π-shapedfunctions can be used. Initially, membership functions aredetermined using the mean and standard deviation valuesof input variables. Subsequently, during learning thesefunctions are updated. Layers L
2 and L
3 represent a two-
layer feed-forward network. The connection strengthsconnecting these layers encode fuzzy rules used in decisionmaking. In order to encode decision rules, we have used agradient descent search technique (Pao, 1989). The algorithmminimizes the mean squared error obtained by comparingthe desired output with the actual output. The model learnsin two phases. During the first phase of learning the weightsbetween layers L
2 and L
3 are updated so as to minimize the
mean squared error, and during the second phase fuzzymembership functions are updated. Once the learning iscompleted the model can be used to classify any unknowninput sample. Layers in the model are described below.Layer L
l. The number of units in this layer is equal to the
number of input features. Units in this layer correspond toinput features, and they just transmit the input vector to thenext layer. The net-input and activation function for thislayer are given by
neti = x
i
outi = net
i(18)
where neti indicates the net-input, and out
i indicates the
output of unit i.Layer L
2. This layer implements membership functions. In
the present case we have used five term variables {very-low, low, medium, high, very high} for each input featurevalue. The number of units in layer L
2 is five times the
number of units in L1. The net-input and activation function
for units are chosen so as to implement Gaussian membershipfunctions which are given by
f(x, σ, m) = exp [-{(x-m)2/2σ 2}] (19)
where m represents the mean value and σ represents thestandard deviation for a given membership function. Thenet-input and output for units in L
2 are given by
neti = x
i
outi = f(x; σ, m) (20)
Layers L2 and L
3. These layers implement the inference
engine. Layers L2 and L
3 represent a simple two-layer feed-
forward network, Layer L2 serves as the input layer and L
3
represents the output layer. The number of units in theoutput layer is equal to the number of output classes. Thenet-input and out-put for units in L
3 is given by
neti = Σ out
j w
ij(21)
j
outi = 1 / { 1 + exp [-(net
i + φ)] } (22)
where outi is the output of unit i and φ is a constant. Initially
weights between layers L2 and L
3 are chosen randomly, and
subsequently they are updated. The fuzzy membership areinitially determined based on the minimum and maximumvalues of input features. The algorithm minimizes the meansquared between the desired and actual outputs. The learningalgorithm is described below.Step 1: Present a continues values input vector x = (x
1, x
2, ...
xn)T to layer L
1, and obtain the output vector o = (o
1, o
2, ...
om)T at layer L
3. In order to obtain the output vector o,
calculations are done layer by layer from L1 to L
3.
Step 2: Calculate the change in weights. In order to calculatethe change in weights the output vector o is compared withdesired output vector or target vector d, and the meansquared error is then propagated backward. The change inweight ∆w
ij is given by
∆wij = -α ∂E/∂w
ij(23)
where α is a training rate coefficient (typically 0.01 to 1.0)and E represents the mean squared error at L
3. Using the
chain rule for evaluating the derivative in Equation (25),we get
∆wij = -α δi o
j(24)
where
δi = o
i (1 - o
i) (d
i - o
i)
In order to update membership function, we need to findchange in parameters i. e. mean values and standarddeviations that define membership functions. Again usingthe chain rule, the change in mean values is given by
∆mkj = -ß ∂E/∂m (25)
n∆m
kj = ßexp[{(x
k - m)2/2σ 2}{( x
k-m)/σ2}] Σδi w
ij(26)
i=1
where
and δi = o
i (l-o
i) (d
i -y
i)
Similarly for changes in standard deviation values we get
∆σkj = -γ∂E/∂σ (27)
n∆σ
kj= γ exp[{(x
k-m)2/ 2σ2} {( x
k- m)/σ3}] Σδi w
ij(28)
i=1
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ebra
ska,
Lin
coln
] at
01:
31 1
8 O
ctob
er 2
014
46
Figure 3 A three-layer fuzzy-neural inference
L2
L1
x1
x2
xn
O1L3
O2
O3
Om
Step 3: Update weights and membership functions
wij (k + l) = w
ij(k) + ∆w
ij
mij (k + l) = m
ij(k) + ∆m
ij
σij (k + l) = σ
i(k) + ∆σ
ij(29)
The update procedure can be implemented in two phases.During the first phase we update weights and considermembership functions as constants, where as during thesecond phase we update membership functions and keepthe updated weights unchanged.Step 4: Obtain the mean squared error at L
3.
mε = Σ (o
i - d
i) 2 (30)
i=1If the error is greater than some minimum value ε
min then
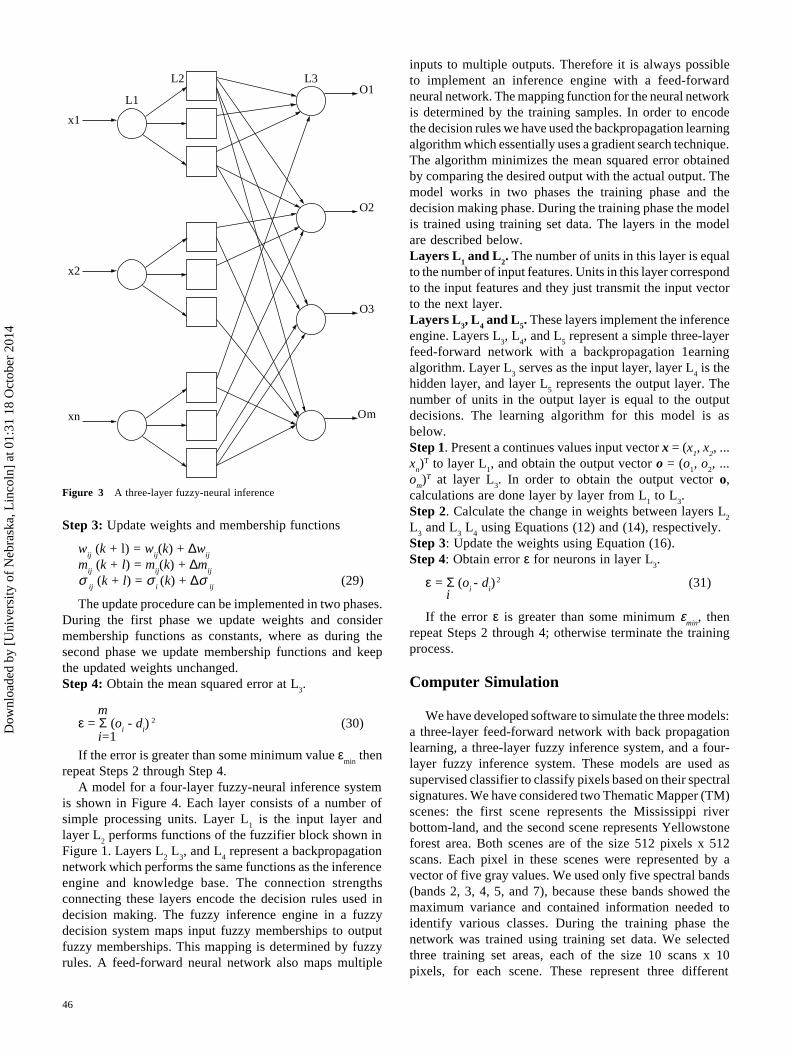
repeat Steps 2 through Step 4.A model for a four-layer fuzzy-neural inference system
is shown in Figure 4. Each layer consists of a number ofsimple processing units. Layer L
1 is the input layer and
layer L2 performs functions of the fuzzifier block shown in
Figure 1. Layers L2 L
3, and L
4 represent a backpropagation
network which performs the same functions as the inferenceengine and knowledge base. The connection strengthsconnecting these layers encode the decision rules used indecision making. The fuzzy inference engine in a fuzzydecision system maps input fuzzy memberships to outputfuzzy memberships. This mapping is determined by fuzzyrules. A feed-forward neural network also maps multiple
inputs to multiple outputs. Therefore it is always possibleto implement an inference engine with a feed-forwardneural network. The mapping function for the neural networkis determined by the training samples. In order to encodethe decision rules we have used the backpropagation learningalgorithm which essentially uses a gradient search technique.The algorithm minimizes the mean squared error obtainedby comparing the desired output with the actual output. Themodel works in two phases the training phase and thedecision making phase. During the training phase the modelis trained using training set data. The layers in the modelare described below.Layers L
1 and L
2. The number of units in this layer is equal
to the number of input features. Units in this layer correspondto the input features and they just transmit the input vectorto the next layer.Layers L
3, L
4 and L
5. These layers implement the inference
engine. Layers L3, L
4, and L
5 represent a simple three-layer
feed-forward network with a backpropagation 1earningalgorithm. Layer L
3 serves as the input layer, layer L
4 is the
hidden layer, and layer L5 represents the output layer. The
number of units in the output layer is equal to the outputdecisions. The learning algorithm for this model is asbelow.Step 1. Present a continues values input vector x = (x
1, x
2, ...
xn)T to layer L
1, and obtain the output vector o = (o
1, o
2, ...
om)T at layer L
3. In order to obtain the output vector o,
calculations are done layer by layer from L1 to L
3.
Step 2. Calculate the change in weights between layers L2
L3 and L
3 L
4 using Equations (12) and (14), respectively.
Step 3: Update the weights using Equation (16).Step 4: Obtain error ε for neurons in layer L
3.
ε = Σ (oi - d
i) 2 (31)
i
If the error ε is greater than some minimum εmin
, thenrepeat Steps 2 through 4; otherwise terminate the trainingprocess.
Computer Simulation
We have developed software to simulate the three models:a three-layer feed-forward network with back propagationlearning, a three-layer fuzzy inference system, and a four-layer fuzzy inference system. These models are used assupervised classifier to classify pixels based on their spectralsignatures. We have considered two Thematic Mapper (TM)scenes: the first scene represents the Mississippi riverbottom-land, and the second scene represents Yellowstoneforest area. Both scenes are of the size 512 pixels x 512scans. Each pixel in these scenes were represented by avector of five gray values. We used only five spectral bands(bands 2, 3, 4, 5, and 7), because these bands showed themaximum variance and contained information needed toidentify various classes. During the training phase thenetwork was trained using training set data. We selectedthree training set areas, each of the size 10 scans x 10pixels, for each scene. These represent three different
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ebra
ska,
Lin
coln
] at
01:
31 1
8 O
ctob
er 2
014
47
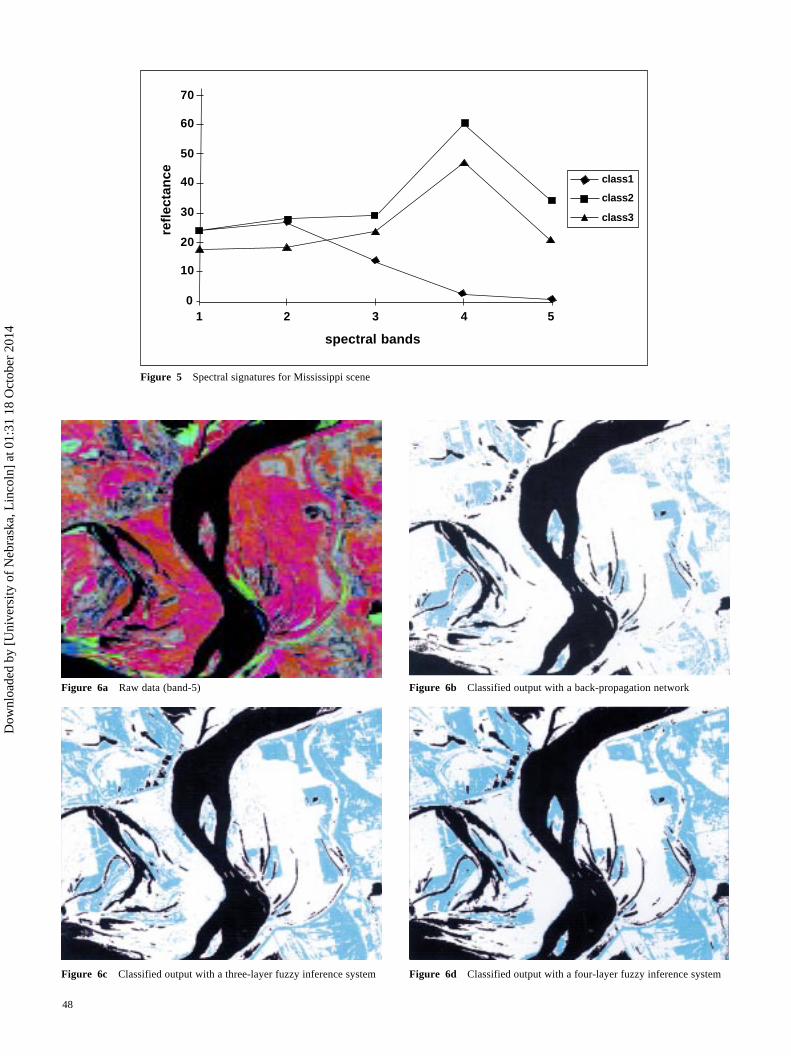
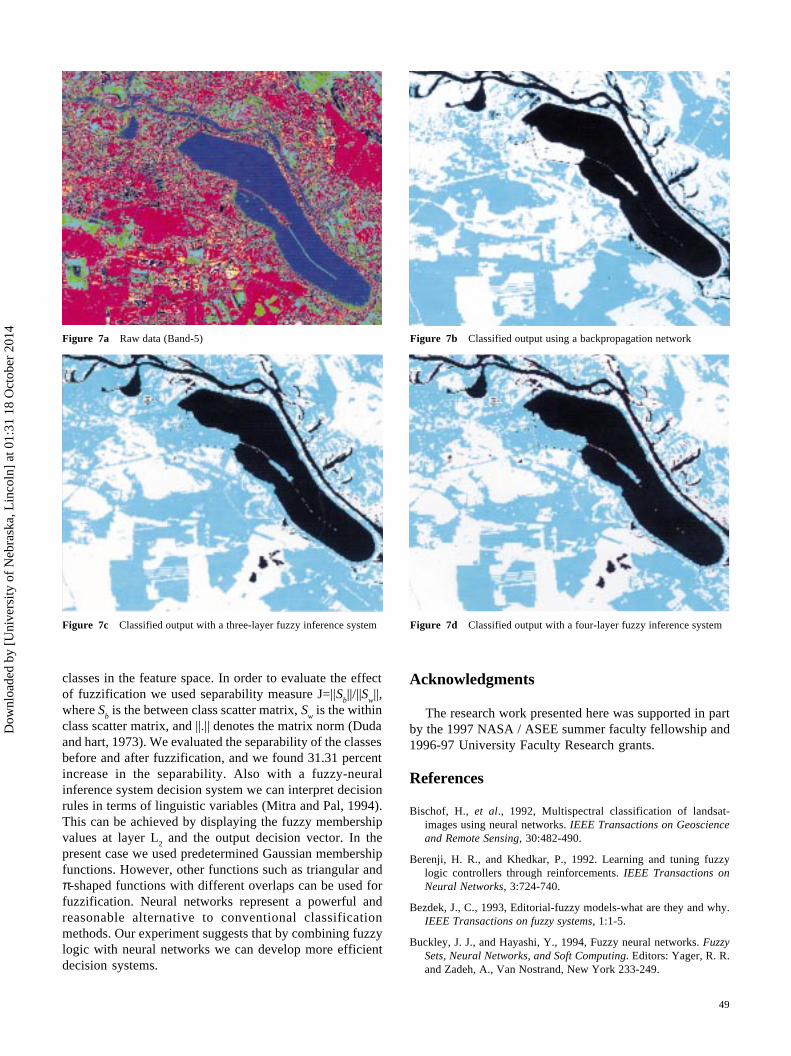
updated, and during the second phase membershipfunctions are updated. For Mississippi scene themodel was able to converge in 2500 iterations.Two scenes were analyzed with this model, andthe classified output is shown in Figures 6c and7c, respectively.
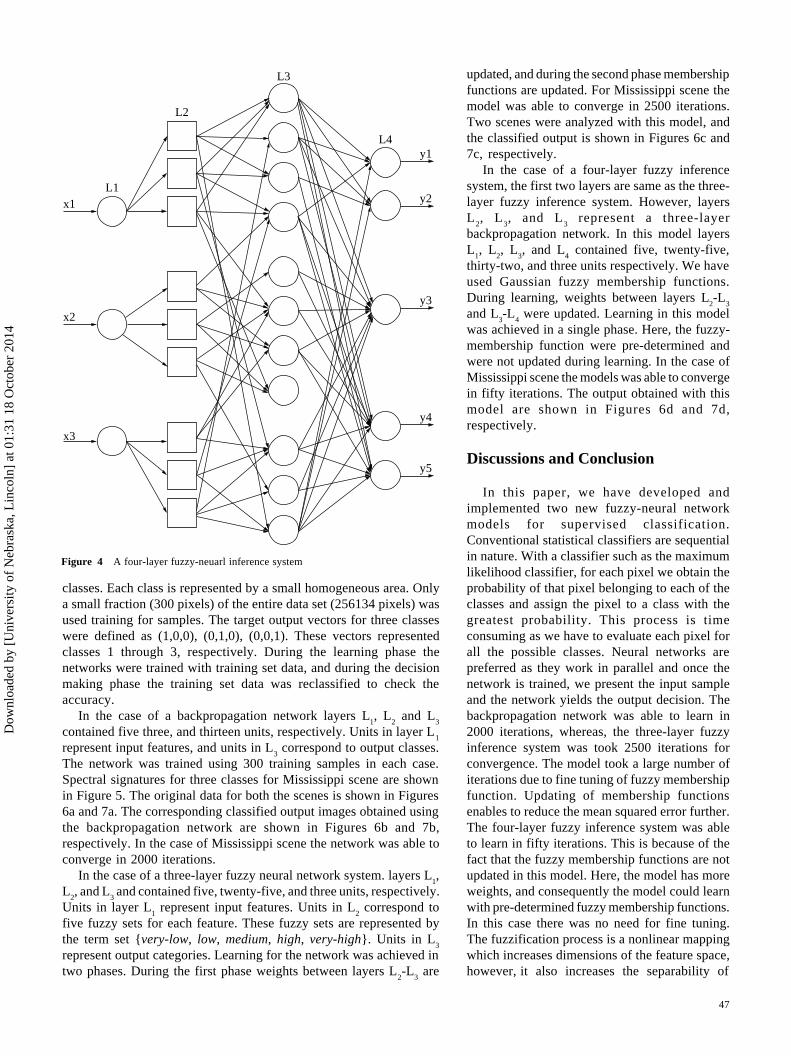
In the case of a four-layer fuzzy inferencesystem, the first two layers are same as the three-layer fuzzy inference system. However, layersL
2, L
3, and L
3 represent a three-layer
backpropagation network. In this model layersL
1, L
2, L
3, and L
4 contained five, twenty-five,
thirty-two, and three units respectively. We haveused Gaussian fuzzy membership functions.During learning, weights between layers L
2-L
3
and L3-L
4 were updated. Learning in this model
was achieved in a single phase. Here, the fuzzy-membership function were pre-determined andwere not updated during learning. In the case ofMississippi scene the models was able to convergein fifty iterations. The output obtained with thismodel are shown in Figures 6d and 7d,respectively.
Discussions and Conclusion
In this paper, we have developed andimplemented two new fuzzy-neural networkmodels for supervised classification.Conventional statistical classifiers are sequentialin nature. With a classifier such as the maximumlikelihood classifier, for each pixel we obtain theprobability of that pixel belonging to each of theclasses and assign the pixel to a class with thegreatest probability. This process is timeconsuming as we have to evaluate each pixel forall the possible classes. Neural networks arepreferred as they work in parallel and once thenetwork is trained, we present the input sampleand the network yields the output decision. Thebackpropagation network was able to learn in2000 iterations, whereas, the three-layer fuzzyinference system was took 2500 iterations forconvergence. The model took a large number ofiterations due to fine tuning of fuzzy membershipfunction. Updating of membership functionsenables to reduce the mean squared error further.The four-layer fuzzy inference system was ableto learn in fifty iterations. This is because of thefact that the fuzzy membership functions are notupdated in this model. Here, the model has moreweights, and consequently the model could learnwith pre-determined fuzzy membership functions.In this case there was no need for fine tuning.The fuzzification process is a nonlinear mappingwhich increases dimensions of the feature space,however, it also increases the separability of
classes. Each class is represented by a small homogeneous area. Onlya small fraction (300 pixels) of the entire data set (256134 pixels) wasused training for samples. The target output vectors for three classeswere defined as (1,0,0), (0,1,0), (0,0,1). These vectors representedclasses 1 through 3, respectively. During the learning phase thenetworks were trained with training set data, and during the decisionmaking phase the training set data was reclassified to check theaccuracy.
In the case of a backpropagation network layers L1, L
2 and L
3
contained five three, and thirteen units, respectively. Units in layer L1
represent input features, and units in L3 correspond to output classes.
The network was trained using 300 training samples in each case.Spectral signatures for three classes for Mississippi scene are shownin Figure 5. The original data for both the scenes is shown in Figures6a and 7a. The corresponding classified output images obtained usingthe backpropagation network are shown in Figures 6b and 7b,respectively. In the case of Mississippi scene the network was able toconverge in 2000 iterations.
In the case of a three-layer fuzzy neural network system. layers L1,
L2, and L
3 and contained five, twenty-five, and three units, respectively.
Units in layer L1 represent input features. Units in L
2 correspond to
five fuzzy sets for each feature. These fuzzy sets are represented bythe term set {very-low, low, medium, high, very-high}. Units in L
3
represent output categories. Learning for the network was achieved intwo phases. During the first phase weights between layers L
2-L
3 are
Figure 4 A four-layer fuzzy-neuarl inference system
L2
L1x1
x2
x3
L3
L4y1
y2
y3
y4
y5
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ebra
ska,
Lin
coln
] at
01:
31 1
8 O
ctob
er 2
014
48
Figure 5 Spectral signatures for Mississippi scene
Figure 6a Raw data (band-5) Figure 6b Classified output with a back-propagation network
Figure 6c Classified output with a three-layer fuzzy inference system Figure 6d Classified output with a four-layer fuzzy inference system
refle
ctan
ce
30
40
50
60
70
20
10
01 2 3 4 5
spectral bands
class1
class2
class3
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ebra
ska,
Lin
coln
] at
01:
31 1
8 O
ctob
er 2
014
49
classes in the feature space. In order to evaluate the effectof fuzzification we used separability measure J=||S
b||/||S
w||,
where Sb is the between class scatter matrix, S
w is the within
class scatter matrix, and ||.|| denotes the matrix norm (Dudaand hart, 1973). We evaluated the separability of the classesbefore and after fuzzification, and we found 31.31 percentincrease in the separability. Also with a fuzzy-neuralinference system decision system we can interpret decisionrules in terms of linguistic variables (Mitra and Pal, 1994).This can be achieved by displaying the fuzzy membershipvalues at layer L
2 and the output decision vector. In the
present case we used predetermined Gaussian membershipfunctions. However, other functions such as triangular andπ-shaped functions with different overlaps can be used forfuzzification. Neural networks represent a powerful andreasonable alternative to conventional classificationmethods. Our experiment suggests that by combining fuzzylogic with neural networks we can develop more efficientdecision systems.
Acknowledgments
The research work presented here was supported in partby the 1997 NASA / ASEE summer faculty fellowship and1996-97 University Faculty Research grants.
References
Bischof, H., et al., 1992, Multispectral classification of landsat-images using neural networks. IEEE Transactions on Geoscienceand Remote Sensing, 30:482-490.
Berenji, H. R., and Khedkar, P., 1992. Learning and tuning fuzzylogic controllers through reinforcements. IEEE Transactions onNeural Networks, 3:724-740.
Bezdek, J., C., 1993, Editorial-fuzzy models-what are they and why.IEEE Transactions on fuzzy systems, 1:1-5.
Buckley, J. J., and Hayashi, Y., 1994, Fuzzy neural networks. FuzzySets, Neural Networks, and Soft Computing. Editors: Yager, R. R.and Zadeh, A., Van Nostrand, New York 233-249.
Figure 7a Raw data (Band-5) Figure 7b Classified output using a backpropagation network
Figure 7c Classified output with a three-layer fuzzy inference system Figure 7d Classified output with a four-layer fuzzy inference system
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ebra
ska,
Lin
coln
] at
01:
31 1
8 O
ctob
er 2
014

50
Cox, E., 1994, The fuzzy systems handbook. Academic Press,Cambridge, MA.
Duda, R. O. and Hart, P. E., 1973, Pattern classification and sceneanalysis. John Wiley and Sons, New York NY.
Gupta, M. M., 1994, Fuzzy neural networks: theory and applications.Proceedings of SPIE, 2353:303-325.
Horikawa, S., Furuhashi, T., and Uchikawa, Y., 1992, On fuzzymodeling using neural networks with the backpropagationalgorithm. IEEE Transactions on Neural Networks, 3:801-806.
Jang J. S. R., 1993, ANFIS: Adaptive network based fuzzy inferencesystems. IEEE Transactions on Systems, Man and Cybernetics,23:665-685.
Jang J. S. R., and Sun C. T., 1995, Neuro-fuzzy modeling and control,Proceedings of IEEE, 83:378-406.
Jang, J. S. R., Sun, C. T., and Mizutani, E., 1997, “Neuro-fuzzy andsoft computing,” Prentice Hall, Upper Saddle River, NJ.
Kosko, B., 1992, Neural networks and fuzzy systems. Prentice Hall,Englewood Cliffs, NJ.
Krishnapuram, R., and Lee, J., 1992, Fuzzy-set based hierarchicalnetworks for information fusion in computer vision. NeuralNetworks, 5:335-350.
Kulkarni, A. D., 1994, Artificial neural networks for imageunderstanding, Van Nostrand Reinhold. New York, NY.
Kulkarni, A. D., Giridhar, G. B., and Coca, P., l995, Neural networkbased fuzzy logic decision systems for multispectral image analysis.Neural, Parallel & Scientific Computations, 3:205-218.
Lee, C. C., 1990, Fuzzy logic in control systems: Fuzzy logic controllerPart I. IEEE Transactions on Systems, Man, Cybernetics, 120:404-418.
Lin, Chin-Teng, and Lee George C. S., 1991, Neural network basedfuzzy logic control and decision system. IEEE Transactions onComputers, 40:1320-1336.
Lin C. T. and Lee George C. S., 1994, Reinforcement structure /parameter learning neural network based fuzzy logic controlsystems, IEEE Transactions on Fuzzy Systems, 2:46-63.
Mendel, J. M., 1995, Fuzzy logic systems for engineering: A Tutorial.Proceedings of IEEE, 83:345-377.
Pal, S. K., and Mitra, S., 1992, Multilayer perceptron, fuzzy sets, andclassification, IEEE Transactions on Neural Networks, 3:683-697.
Pao, Y. H., 1989, Adaptive pattern recognition and neural networks.Addison-Wesley, Reading, MA.
Takagi, H. and Hayashi, I., 1991, NN-Driven fuzzy reasoning.International Journal of Approximate Reasoning, 5:191-212.
Yager, R. R., and Zadeh, L. A. (Editors), 1994, Fuzzy sets, neuralnetworks, and soft computing. Von Nostrand Reinhold, NY.
Zaheh, L. A., 1965, Fuzzy sets. Information and Control, 8:338-352.
Zadeh, L. A., 1973, Outline of a new approach to analysis of complexsystems and decision processes. IEEE Transactions on Systems,Man, and Cybernetics, 3:28-44.
Zadeh, L. A., 1994, Fuzzy logic neural networks, and soft computing.Communications of the ACM, 37:77-84.
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ebra
ska,
Lin
coln
] at
01:
31 1
8 O
ctob
er 2
014

51
Topics
All topics related to meteorology, climatology andapplications are welcome. Special emphasis should beput on
- Data calibration and atmospheric correction
- Atmospheric sounding
- Atmospheric gases and aerosols
- Radiation and heat balance
- Weather prediction
- Hazard management
- Application in regional and local planning
- Ground based systems (Lidar, Radar)
- Potentials of new sensors for atmospheric research
Call for papers
You are cordially invited to express your interest in thisworkshop by submitting an abstract of your intendedpaper or poster presentation (max. one A4-page). Allpapers will be scrutinised by the scientific committee.The deadline for submitting abstracts is December 1st,1999. You will be informed about the acceptance ofyour paper or poster by December 31st. The cameraready copy of the paper should be submitted at theworkshop.
Abstract can be sent to (Fax or e-mail):Prof. Dr. E. ParlowMCR LabUniversity of BaselSpalenring 145CH – 4055 Basel, SwitzerlandFax: +41-61-272-69-23e-mail: [email protected]
Language
English
Location
The workshop will take place at the University of Basel.Detailed information concerning lecture room etc. isannounced in the preliminary program.
Workshop onRemote Sensing in Meteorology
andClimate Research
Basel/Switzerland, Feburary 21-22, 2000
Aim of the EARSeL SIG for TopicsAtmosphere and Meteorology
From the beginning of remote sensing this techniquewas used for meteorological purposes. In the meantimethe use of remotely sensed data has widely expandedwithin meteorology and atmospheric sciences. Changesof the chemical composition of the atmosphere, globalclimate problems, atmospheric hazards, weatherprediction, storm forecast, urban climate, environmentalmonitoring are only some of the topics withinmeteorology and climatology where satellite data playan important role.The EARSeL Special Interest Group Atmosphere wascreated at the beginning of the 90s and organised a firstworkshop in 1995 in Basel. The coming workshop isforeseen to reactivate the activities of the SIG.
Scientific Committee
Prof. Dr. E. Parlow – Institute of Meteorology,Climatology and Remote Sensing, Basel (CH)Prof. Dr. H. Gossmann – Institute of Physical Geography,Freiburg (FRG)Prof. Dr. B. Lundén – Institute of Physical Geography,Stockholm (S)Prof. Dr. L. Wald – Ecole des Mines de Paris, SophiaAntipolis (F)
Organising Committee
Prof. Dr. E. Parlow – MCR LabPD Dr. D. Scherer – MCR LabMadeleine Godefroy – EARSeL SecretariatJosette Pfefferli – MCR LabGünter Bing – MCR Lab
Further Information
Prof. Dr. E. ParlowMCR LabUniversity of BaselSpalenring 145CH – 4055 Basel, SwitzerlandFax: +41-61-272-69-23e-mail: [email protected]:http://www-earsel.cma.fr/http://www.gib.unibas.ch/mcr/InfoBox/SIG.htm
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ebra
ska,
Lin
coln
] at
01:
31 1
8 O
ctob
er 2
014




























