Embed Size (px)
Citation preview

1
FX-TRN-BEG-E
MITSUBISHI PLC EGİTİM YAZILIMI
ÇALIŞMA SORULARI VE DERS NOTLARI
HAZIRLAYAN:
KAHRAMAN ÖNEY
ADİL KARAAĞAÇ MESLEKİ VE TEKNİK ANADOLU LİSESİ
ENDÜSTRİYEL OTOMASYON SİSTEMLERİ BÖLÜM ÖĞRETMENİ

4
A3.S1
X24 paket şalterini “ON” konumuna aldığımızda
yürüyen bandın (Y1) çalışmasını istiyoruz. Ladder
diyagramını çizerek uygulayınız.

6
A3.S2
X24 paket şalterini “ON” konumuna aldığımızda
yürüyen bandın (Y1) çalışmasını, X20 başlatma
butonuna bastığımızda da robotun, yürüyen banda
koli koymasını (Y0) istiyoruz. Ladder diyagramını
çizerek uygulayınız.

8
A3.S3
X24 paket şalterini “ON” konumuna aldığımızda
yürüyen bandın (Y1) çalışmasını, X20 başlatma
butonuna bastığımızda da robotun, yürüyen banda
koli koymasını (Y0) istiyoruz. Kolilerin yürüyen
banttan yere değil de biriktirme sandığına düşmesi
için ise X21 butonu ile iticiyi (Y2) çalıştırmak istiyoruz.
Ladder diyagramını çizerek uygulayınız.

10
A3.S4
X24 paket şalterini “ON” konumuna aldığımızda
yürüyen bandın (Y1) çalışmasını, X20 başlatma
butonuna bastığımızda da robotun, yürüyen banda
koli koymasını (Y0) istiyoruz. Kolilerin yürüyen
banttan yere değil de biriktirme sandığına düşmesi
için ise X21 butonu ile iticiyi (Y2) çalıştırmak istiyoruz.
Parçaların aşağıya düşmemesi için itici önündeki
sensörü (X0) kullanarak ladder diyagramını oluşturup
uygulayınız.

12
A3.S5
X24 paket şalterini “ON” konumuna aldığımızda
yürüyen bandın (Y1) çalışmasını, X20 başlatma
butonuna bastığımızda da robotun, yürüyen banda
koli koymasını (Y0) istiyoruz. Kolilerin yürüyen
banttan yere değil de biriktirme sandığına düşmesi
için ise X21 butonu veya otomatik olarak iticiyi (Y2)
çalıştırmak istiyoruz. Parçaların aşağıya düşmemesi
için itici önündeki sensörü (X0) kullanarak ladder
diyagramını oluşturup uygulayınız.

14
A3.S6
X24 paket şalterini “ON” konumuna aldığımızda
yürüyen bandın (Y1) çalışmasını, X20 başlatma butonuna
bastığımızda da robotun, yürüyen banda koli koymasını
(Y0) istiyoruz. Kolilerin yürüyen banttan yere değil de
biriktirme sandığına düşmesi (Y2), ve parçaların robot
tarafından tekrar yerleştirilmesi de otomatik olarak
gerçekleşsin. Parçaların aşağıya düşmemesi için itici
önündeki sensörü (X0) kullanarak ladder diyagramını
oluşturup uygulayınız.

18
B1.S1
PB1 (X20) butonu basılı olduğu sürece Çalışıyor
(Y0), basılı olmadığı sürece de Dur / Duruyor (Y1)
çıkışının “ON” olmasını istiyoruz. PB2 (X21) veya PB3
(X22) ile birlikte SW1 (X24) şalteri “ON” yapılır ise
Error – Hata (Y2) çıkışının “ON” olmasını istiyoruz.
Ladder diyagramını çizerek uygulayınız.

20
B1.S2
PB1 (X20) butonu basılı olduğu sürece Çalışıyor
(Y0), basılı olmadığı sürece de Dur / Duruyor (Y1)
çıkışının “ON” olmasını istiyoruz. PB2 (X21) veya PB3
(X22) ile birlikte SW1 (X24) şalteri “ON” yapılır ise
Error – Hata (Y2) çıkışının “ON” olmasını istiyoruz.
Eğer hata çıkışı “ON” olmuş ise “Çalışıyor” yada “Dur
/ Duruyor” çıkışlarından hiçbirisi “ON” olmasın.

24
B3.S1
X24 anahtarı “ON” yapılır ise Y0 çıkışına bağlı olan
lamba, X25 anahtarı “ON” yapılır ise Y1 çıkışına bağlı
olan lamba ışık versin. Lambalardan herhangi birisi
ışık verirken, diğerinin anahtarı “ON” yapılsa bile ışık
veremesin. Ladder diyagramını çizerek uygulayınız.

26
B3.S2
X20 Başlatma butonuna basılır ise Y0 çıkışına bağlı
olan lamba, X21 butonuna basılır ise Y1 çıkışına bağlı
olan lamba ışık versin. Butonlara bir kez basılması
yeterli olsun. Lambalardan herhangi birisi ışık
verirken diğeri ışık veremesin. Ladder diyagramını
çizerek uygulayınız.

28
B3.S3
X20 Başlatma butonuna basılır ise Y0 çıkışına bağlı
olan lamba, X21 butonuna basılır ise Y1 çıkışına bağlı
olan lamba ışık versin. Butonlara bir kez basılması
yeterli olsun. Lambalardan herhangi birisi ışık
verirken diğeri ışık veremesin. X22 butonunu
lambaları söndürmek için kullanınız. Ladder
diyagramını çizerek uygulayınız.

30
B3.S4
X20 başlatma butonuna basılır ise Y20, X21’e basılır
ise Y21, X22’ye basılır ise Y22 çıkışına bağlı olan
lamba ışık versin. Bu lambalar, sadece bu butonlara
basılı olduğu sürece ışık versinler, lambalardan birisi
ışık verirken diğerleri ışık veremesin. Ladder
diyagramını çizerek uygulayınız.
32
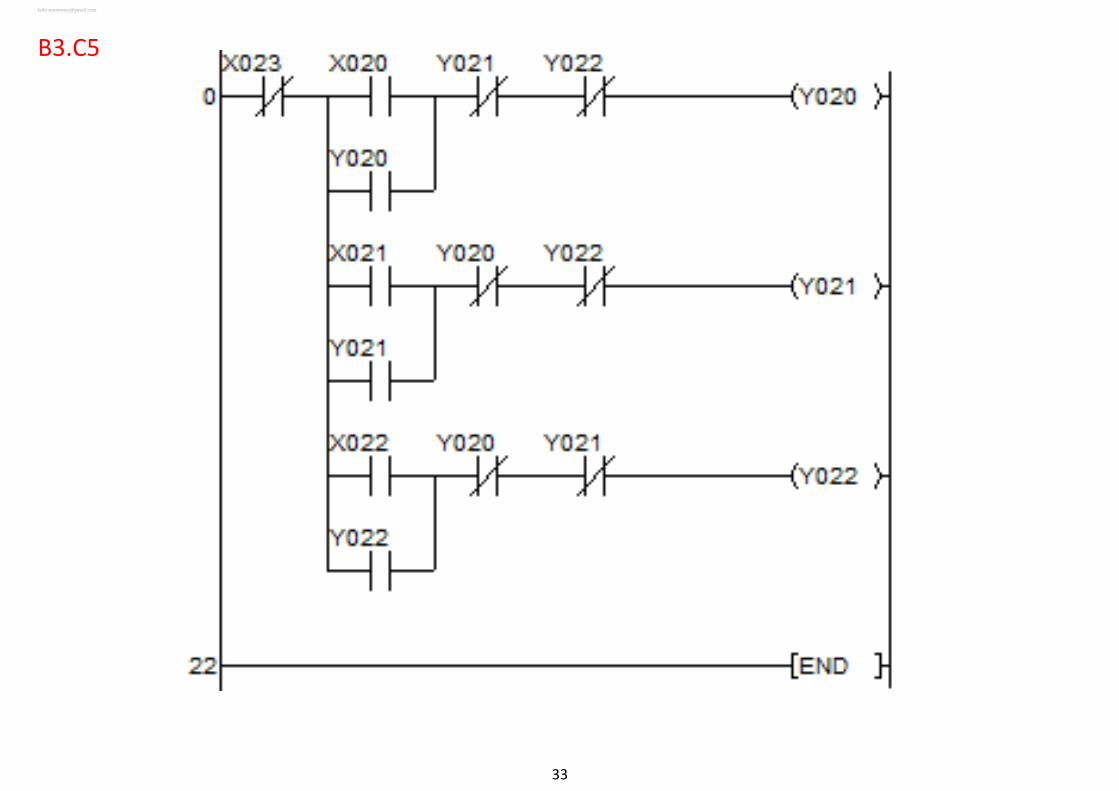
B3.S5
X20 başlatma butonuna basılır ise Y20, X21’e basılır
ise Y21, X22’ye basılır ise Y22 çıkışına bağlı olan
lamba ışık versin. Butonlardan herhangi birisine bir
kez basılması yeterli olsun, lambalardan birisi ışık
verirken diğerleri ışık veremesin. Durdurma butonu
olarak X23 butonunu kullanınız. Ladder diyagramını
çizerek uygulayınız.

34
B3.S6
X20 başlatma butonuna basılır ise Y20, X21’e basılır
ise Y21, X22’ye basılır ise Y22 ve X23’e basılır ise Y23
çıkışına bağlı olan lamba ışık versin. Butonlardan
herhangi birisine bir kez basılması yeterli olsun,
lambalardan birisi ışık verirken diğerleri ışık
veremesin. Durdurma butonu olarak X24 butonunu
kullanınız. Ladder diyagramını çizerek uygulayınız.

36
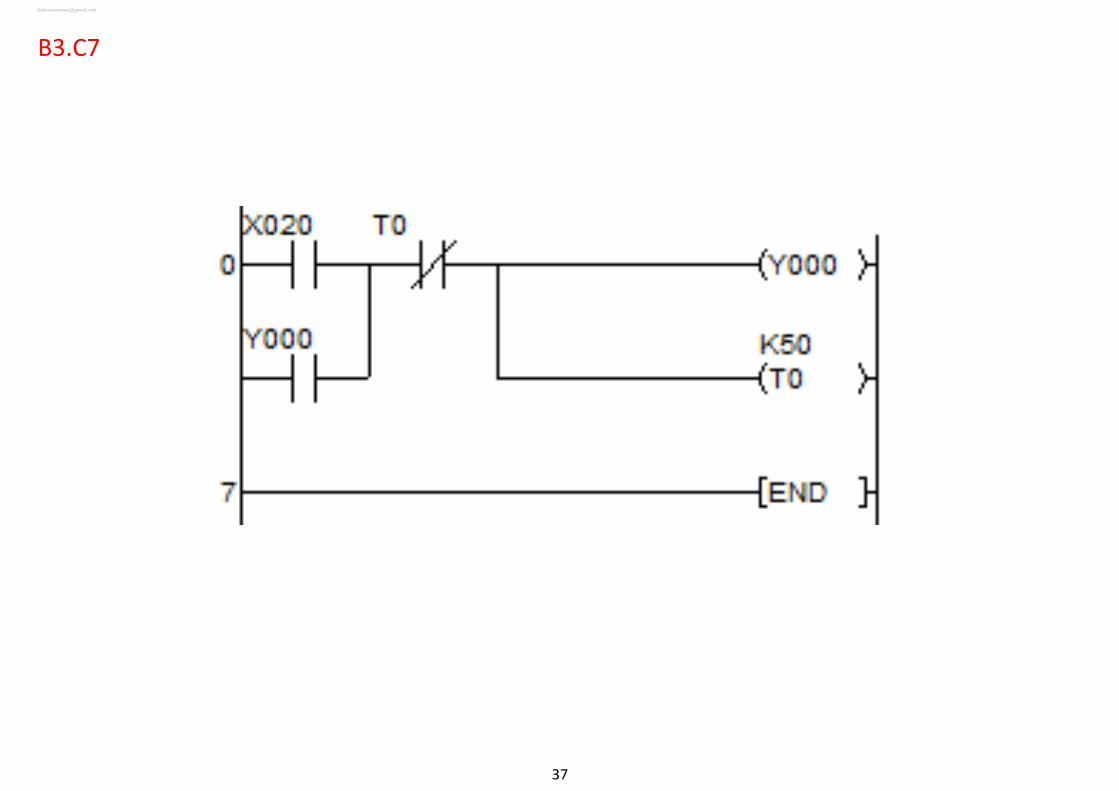
B3.S7
X20 başlatma butonuna basılır basılmaz Y0 çıkışına
bağlı olan lamba ışık versin, 5 saniye sonra
kendiliğinden sönsün. Ladder diyagramını çizerek
uygulayınız.

38
B3.S8
X20 başlatma butonuna basıldıktan 5 saniye sonra
Y0 çıkışına bağlı olan lambanın ışık vermesini
istiyoruz. Durdurma butonu olarak X21 butonunu
kullanınız. Ladder diyagramını çizerek uygulayınız.

40
B3.S9
X20 başlatma butonuna basıldıktan 5 saniye sonra
Y0 çıkışına bağlı olan lambanın ışık vermesini, bu
lambanın ışığının, durdurma butonu (X21) e
basıldıktan 5 saniye sonra sönmesini istiyoruz. Ladder
diyagramını çizerek uygulayınız.

42
B3.S10
X20 başlatma butonuna basılır basılmaz Y0 çıkışına
bağlı olan lamba 2 saniye süre ile “ON” olsun, süre
sonunda 2 saniye süre ile “OFF” olsun, süre sonunda
yeniden 2 saniye süre ile “ON” olsun ve bu şekildeki
çalışma (Flaşör devresi) X21 durdurma butonuna
basılıncaya kadar devam etsin.

44
B3.S11
X20 başlatma butonuna basılır basılmaz Y0 çıkışına
bağlı olan lamba 2 saniye süre ile “ON” olsun, süre
sonunda bu lamba sönerek Y1 çıkışına bağlı olan
lamba 2 saniye süre ile “ON” olsun. 2 saniyenin
sonunda bu lamba da sönerek yeniden Y0 çıkışına
bağlı olan lamba ışık versin. Bu şekildeki çalışma X21
durdurma butonuna basılıncaya kadar devam etsin.
Ladder diyagramını çizerek uygulayınız.
46
B3.S12
X20 başlatma butonuna basılır basılmaz Y0 çıkışına
bağlı olan lamba 2 saniye süre ile ışık versin, süre
sonunda 2 saniye süre ile sönsün, 2 saniye dolunca Y1
çıkışına bağlı olan lamba 2 saniye süre ile ışık versin,
süre sonunda bu lamba da 2 saniye süre ile sönsün.
Süre dolunca yeniden ilk lamba ışık versin ve bu
şekildeki çalışma (çamaşır makinesi motoru) X21
durdurma butonuna basılıncaya kadar devam etsin.

48
B3.S13
X20 başlatma butonuna basılır basılmaz Y20 çıkışına
bağlı olan lamba 2 saniye süre ile ışık versin, süre sonunda
bu lamba sönerek Y21 çıkışına bağlı olan lamba ışık versin,
2 saniye dolunca bu lamba da sönerek Y22 çıkışına bağlı
olan lamba ışık versin, 2 saniye dolunca bu lamba da
sönerek Y23 çıkışına bağlı olan lamba yansın. Bu lamba da
2 saniye süre ile ışık verdikten sonra sönsün ve yeniden ilk
lamba ışık versin. (Yürüyen lambalar) Durdurma butonu
X21 olsun. Ladder diyagramını çizerek uygulayınız.

50
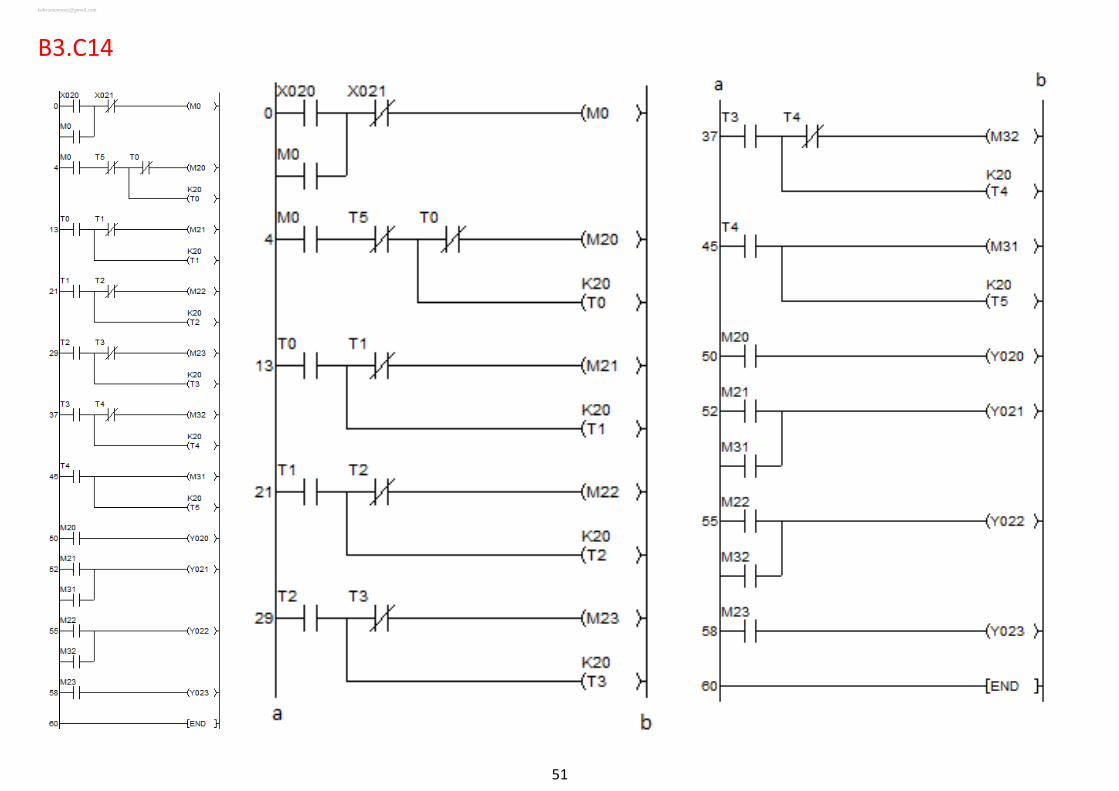
B3.S14
X20 başlatma butonuna basılır basılmaz Y20 çıkışına bağlı olan lamba 2
saniye süre ile ışık versin, süre sonunda bu lamba sönerek Y21 çıkışına
bağlı olan lamba ışık versin, 2 saniye dolunca bu lamba da sönerek Y22
çıkışına bağlı olan lamba ışık versin, 2 saniye dolunca bu lamba da sönerek
Y23 çıkışına bağlı olan lamba ışık versin, 2 saniye dolunca tekrar Y22
çıkışına bağlı olan lamba, bundan 2 saniye sonra da Y21 çıkışına bağlı olan
lamba ışık versin. Daha sonra sistem başa dönsün. (Kara şimşek)
Durdurma butonu X21 olsun. Ladder diyagramını çizerek uygulayınız.

55
Aşağıdaki Ladder diyagramını inceleyerek nasıl
çalıştığını açıklayınız. Bir önceki devre ile farkının olup
olmadığına dikkat ediniz.

56
Aşağıdaki Ladder diyagramını inceleyerek nasıl
çalıştığını açıklayınız. (Kırmızı ve Yeşil lambaların
durumları nasıl olur inceleyiniz.)

57
B4.S1
X20 başlatma butonuna basılır ise, yürüyen bant
ileri yönde çalışacak, X21 başlatma butonuna basılır
ise de geri yönde çalışacak. İleri yön ile birlikte sarı
lamba (Y7) ve geri yön ile birlikte de yeşil lamba (Y6)
çalışacak. Yürüyen bant bir yönde çalışırken diğer yön
butonuna basılsa bile, durdurma butonuna (X23)
basılmadan diğer yönde çalışamayacak. Ladder
diyagramını çizerek uygulayınız.

59
B4.S2
X20 başlatma butonuna basılır basılmaz yürüyen
bant ileri yönde dönmeye başlasın, X21 butonuna
basıldığında da robot yürüyen banda parça koysun.
Robot, yürüyen bant çalışmadığı sürece bant üzerine
parça koyamasın. X23 durdurma butonu ile sistem
durdurulabilsin. Diyagramını çizip uygulayınız.

61
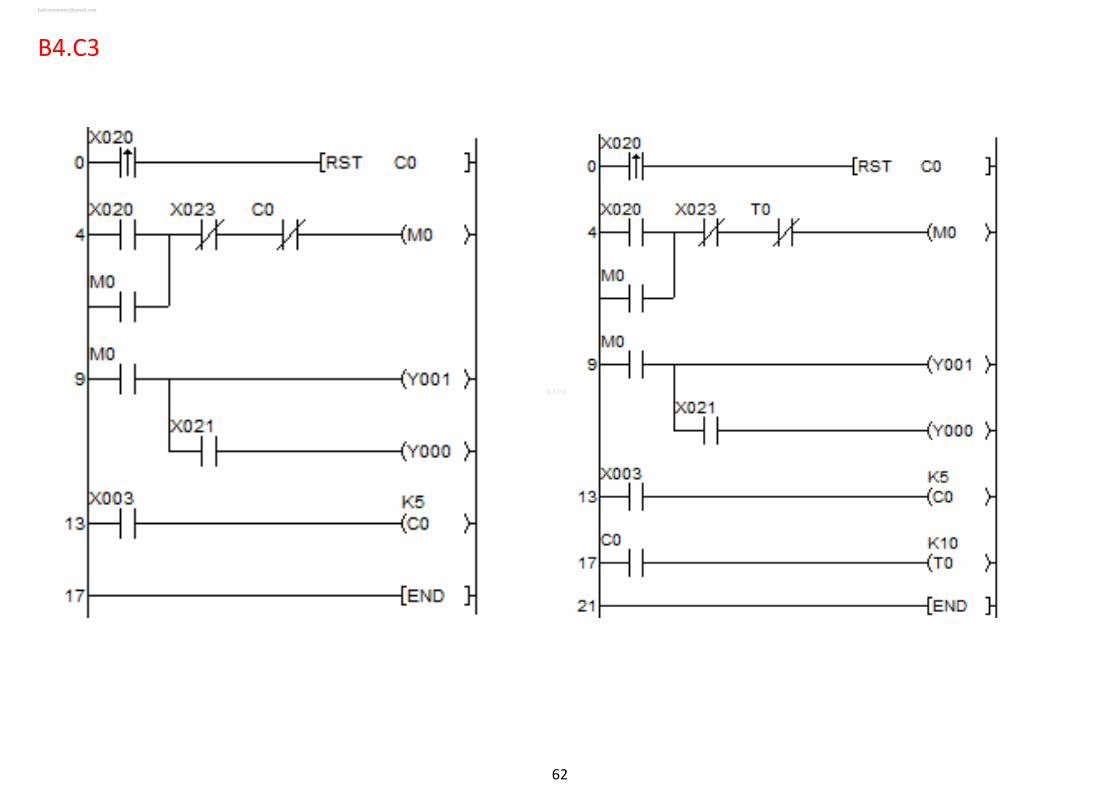
B4.S3
X20 başlatma butonuna basılır basılmaz yürüyen
bant ileri yönde dönmeye başlasın, X21 butonuna
basıldığında da robot yürüyen banda parça koysun.
Robot, yürüyen bant çalışmadığı sürece bant üzerine
parça koyamasın. Sistem, X23 durdurma butonuna
basılınca yada yürüyen banttan geçen parça sayısı 5
olunca otomatik olarak dursun. Yeniden başlatma
butonu ile tekrar çalışabilsin. Diyagramı çizerek
uygulayınız.
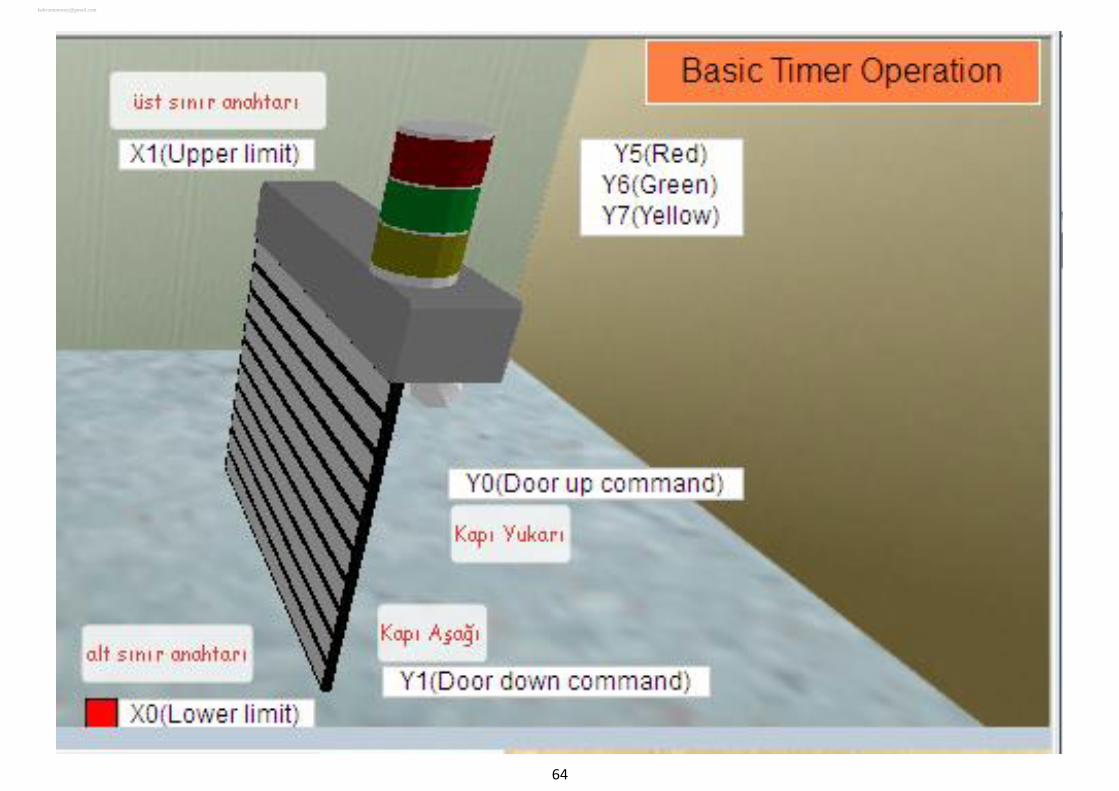
65
C1.S1
Kapı aşağıda ve X20 başlatma butonuna basılmışsa,
kapı yukarıya çıksın, tamamen çıkınca kendiliğinden
dursun. (X20 butonuna bir kez basılması yeterli
olsun.) Ladder diyagramını çizerek uygulayınız.

67
C1.S2
Yukarıdaki soruya ek olarak;
Kapı yukarıda ve X21 başlatma butonuna basılmış
ise, kapı aşağı insin, tamamen inince kendiliğinden
dursun. (Başlatma butonuna bir kez basılması yeterli
olsun)

69
C1.S3
Kapı aşağıda ve X20 başlatma butonuna basılmışsa,
kapı yukarıya çıksın, tamamen çıkınca kendiliğinden
dursun. (kapı tamamen açık iken yeşil lamba yansın.)
Kapı yukarıda ve X21 başlatma butonuna basılmış ise,
kapı aşağı insin, tamamen inince kendiliğinden dursun.
(Kapı tamamen kapanınca kırmızı ışık yansın.)
Kapı ne tam aşağıda nede tam yukarıda ise, yani
açılıyor yada kapanıyor ise sarı lamba ışık versin. Ladder
diyagramını çizip uygulayınız.

71
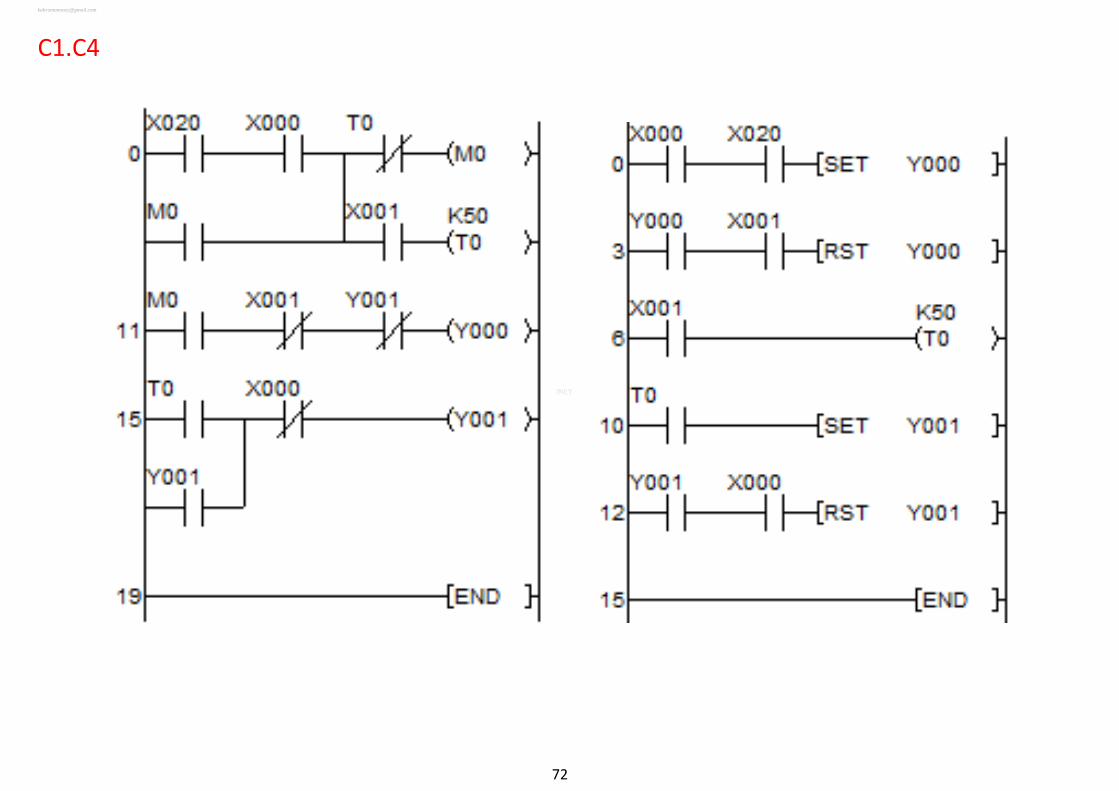
C1.S4
Kapı aşağıda ve X20 başlatma butonuna basılmış
ise kapı yukarıya çıksın, tamamen çıktıktan sonra 5
saniye süre ile yukarıda beklesin ve süre sonunda
kendiliğinden aşağıya insin. Tamamen inince dursun
ve tekrar başlatma butonuna basılır ise sistem aynı
şekilde tekrar çalışsın. Ladder diyagramını çizip
uygulayınız.

73
C1.S5
Kapı aşağıdaysa ve X20 başlatma butonuna
basılmış ise, kapı yukarıya çıksın, tamamen yukarıya
çıkınca orada 5 saniye süre ile dursun ve tekrar aşağı
insin, tamamen aşağı indikten sonra, aşağıda da 5
saniye dursun ve yeniden yukarıya çıksın. Yukarıda
yeniden 5 saniyeyi tamamlayınca aşağı insin ve bu
işlemler X21 durdurma butonuna basılıncaya kadar
devam etsin. Ladder diyagramını çizerek uygulayınız.

77
C2.S1
X20 başlatma butonuna basılır basılmaz kırmızı
lamba (Y5) ışık versin, elimizi butondan çektikten 3
saniye sonra lamba kendiliğinden sönsün. X21
başlatma butonuna basılır basılmaz yeşil lamba (Y6)
ışık versin ve 5 saniye sonra (butona basılma süresi
ne olursa olsun) kendiliğinden sönsün. Diyagramını
çizerek uygulayınız.
81
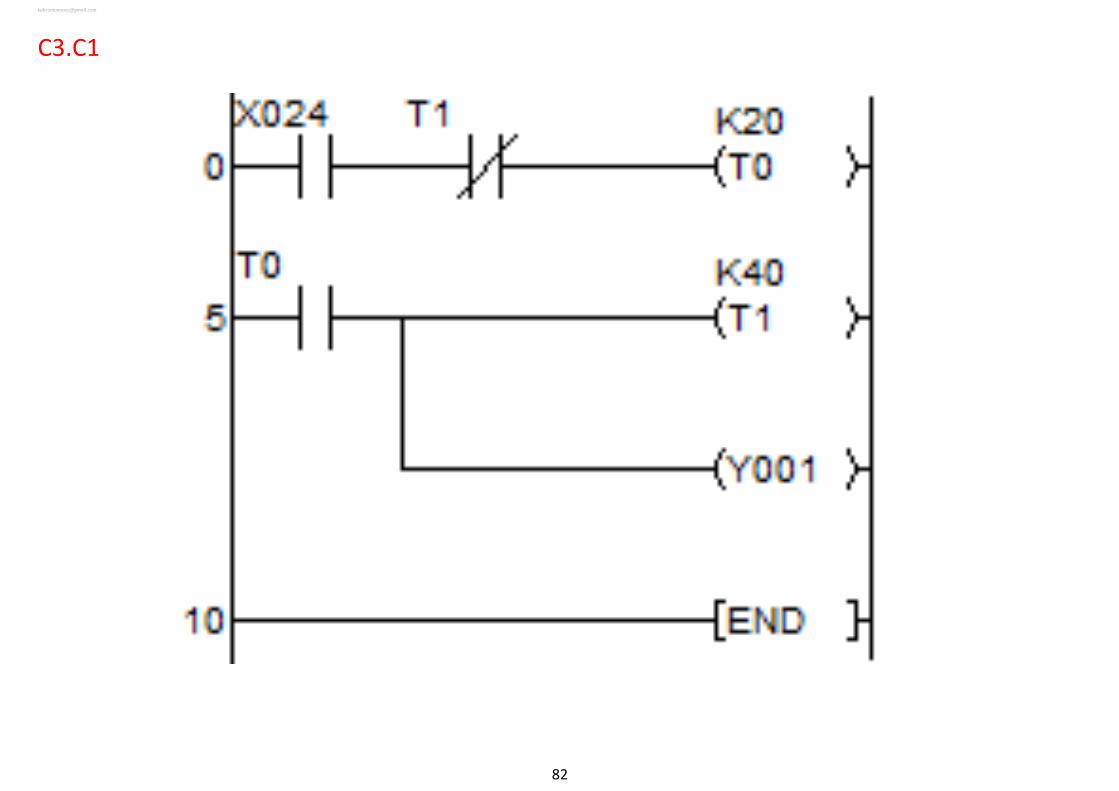
C3.S1
X24 başlatma butonu “ON” yapıldıktan 2 saniye
sonra yeşil lamba (Y1) ışık versin, 4 saniye sonra ışığı
sönsün, tekrar 2 saniye geçince ışık versin ve 4
saniyeyi doldurunca sönsün. Bu şekildeki çalışma X24
butonu “OFF” yapılıncaya kadar devam etsin.
Diyagramını çizerek uygulayınız.

83
C3.S2
X20 başlatma butonuna basıldıktan 2 saniye sonra
yeşil lamba (Y1) ışık versin, 4 saniye sonra ışığı
sönsün, tekrar 2 saniye geçince ışık versin ve 4
saniyeyi doldurunca sönsün. Bu şekildeki çalışma X21
durdurma butonuna basılıncaya kadar devam etsin.
Diyagramını çizerek uygulayınız.

88
C4.S1
X3 şalteri “ON” konumuna alındıktan sonra
yürüyen bant çalışmaya başlayacak. X2 şalteri “ON”
yapılınca, robot tarafından sürekli parça beslemesi
gerçekleştirilecek. Yürüyen bant çalışmadan parça
beslemesi yapılamayacaktır. Diyagramı çizerek
uygulayınız.
90
C4.S2
X3 şalteri “ON” konumuna alındıktan sonra
yürüyen bant çalışmaya başlayacak, yeşil lamba da
(Y4) ışık verecek. X2 şalteri “ON” yapılınca, robot
tarafından sürekli parça beslemesi gerçekleştirilecek,
besleme esnasında sarı lamba (Y5)ışık verecek.
Yürüyen bant çalışmadan parça beslemesi
yapılamayacaktır. Parçalar banttan düşerken de
kırmızı lamba (Y3) ışık verecek. Diyagramı çizerek
uygulayınız.
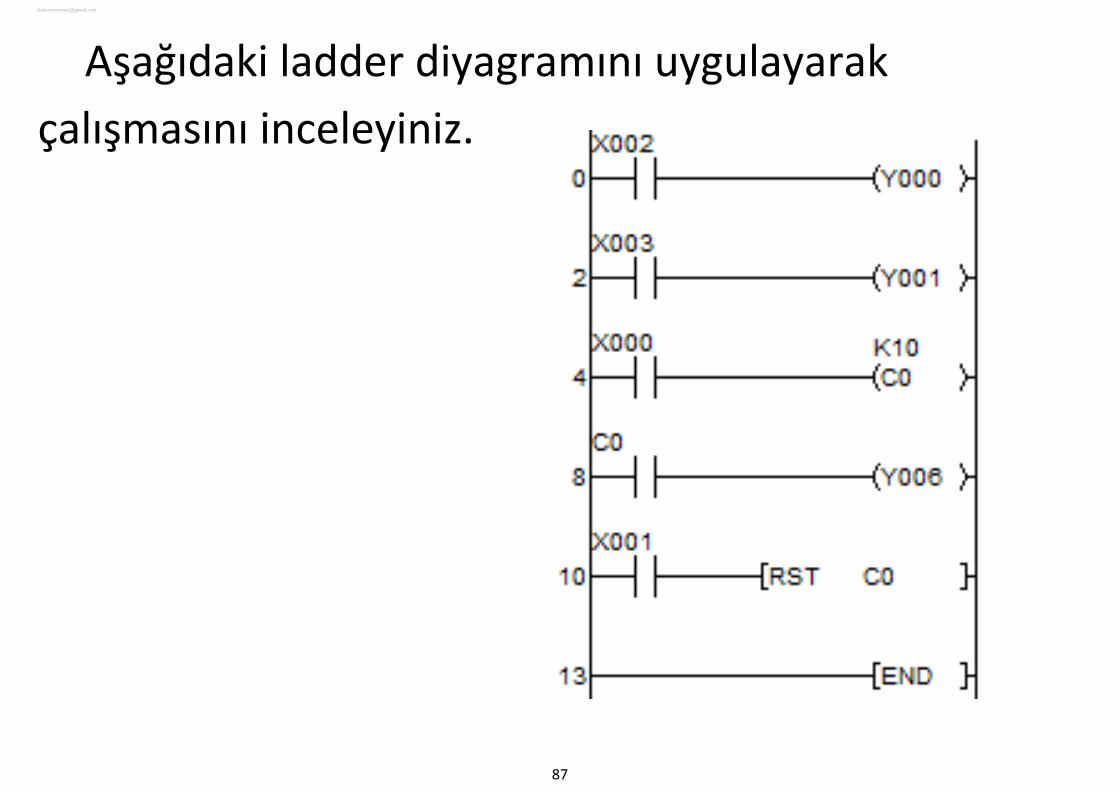
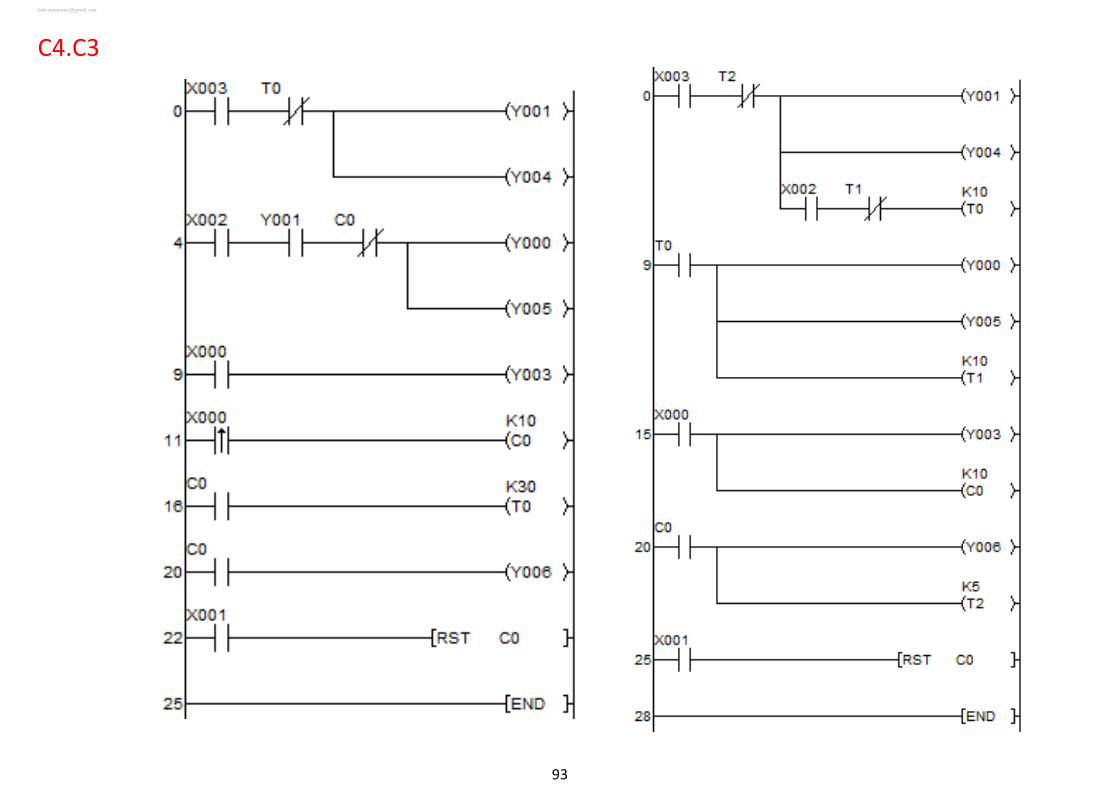
92
C4.S3
X3 şalteri “ON” konumuna alındıktan sonra yürüyen
bant çalışmaya başlayacak, yeşil lamba da (Y4) ışık
verecek. X2 şalteri “ON” yapılınca, robot tarafından sürekli
parça beslemesi gerçekleştirilecek, besleme esnasında sarı
lamba (Y5)ışık verecek. Yürüyen bant çalışmadan parça
beslemesi yapılamayacaktır. Parçalar banttan düşerken de
kırmızı lamba (Y3) ışık verecek. Banttan düşen parça sayısı
10 olunca sistem kendiliğinden duracak, sayıcıya ait
gösterge (Y6) yanacak, reset butonuna (X1) basılınca
sistem tekrar baştan çalışmaya başlayacak. Diyagramı
çizerek uygulayınız.

97
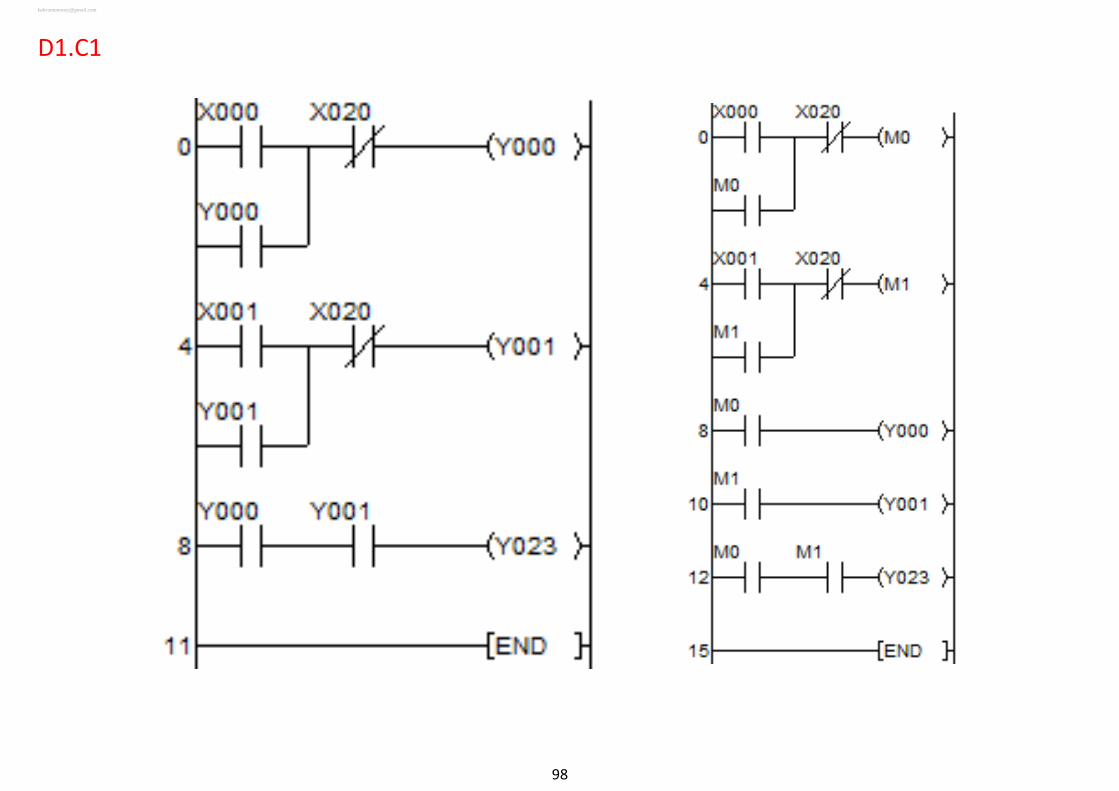
D1.S1
Masa üzerinde bulunan 1 numaralı butona (X0)
basıldığında, yukarıdaki 1 numaralı çağırma ışığı (Y0),
2 numaralı butona (X1) basıldığında da 2 numaralı
çağırma ışığının (Y1) yanmasını istiyoruz. (Butonlara
bir kez basılsa bile lambalar sürekli yansınlar) Eğer
her iki ışık birlikte yanıyor ise, işlem paneli üzerindeki
PL4 (Y23) lambasının da ışık vermesini istiyoruz.
Lambaları söndürmek için PB1 butonunu (X20)
kullanınız. Diyagramını çizerek uygulayınız.
99
D1.S2
Masa üzerinde bulunan 1 numaralı butona (X0) basıldığında,
yukarıdaki 1 numaralı çağırma ışığı (Y0), 2 numaralı butona (X1)
basıldığında da 2 numaralı çağırma ışığının (Y1) yanmasını
istiyoruz. (Butonlara bir kez basılsa bile lambalar sürekli
yansınlar) Eğer her iki ışık birlikte yanıyor ise, işlem paneli
üzerindeki PL4 (Y23) lambasının da ışık vermesini istiyoruz.
Lambaları söndürmek için PB1 butonunu (X20) kullanınız. Eğer
lambaları söndürme butonuna, lambalar yandıktan itibaren 5
saniye içerisinde basılmamış ise, lambalar (Y0 – Y1) 5. Saniyeden
sonra 1’er saniye aralıklarla sönüp yansınlar. Diyagramını çizerek
uygulayınız.
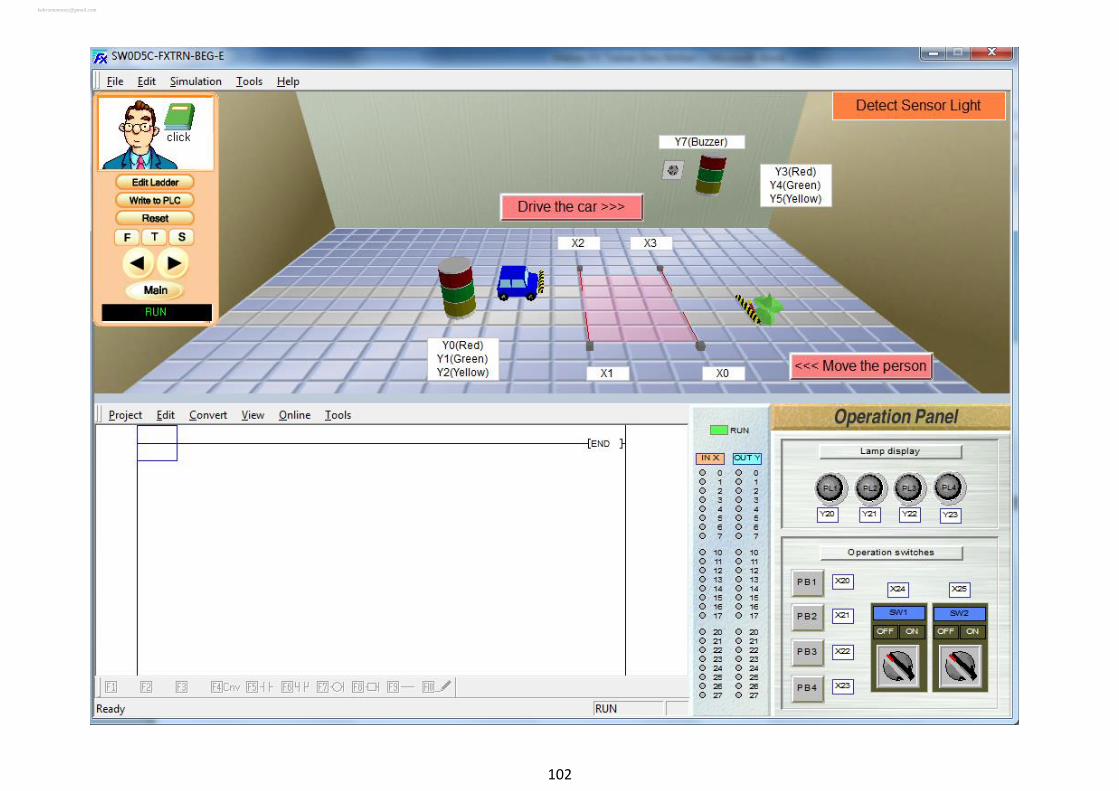
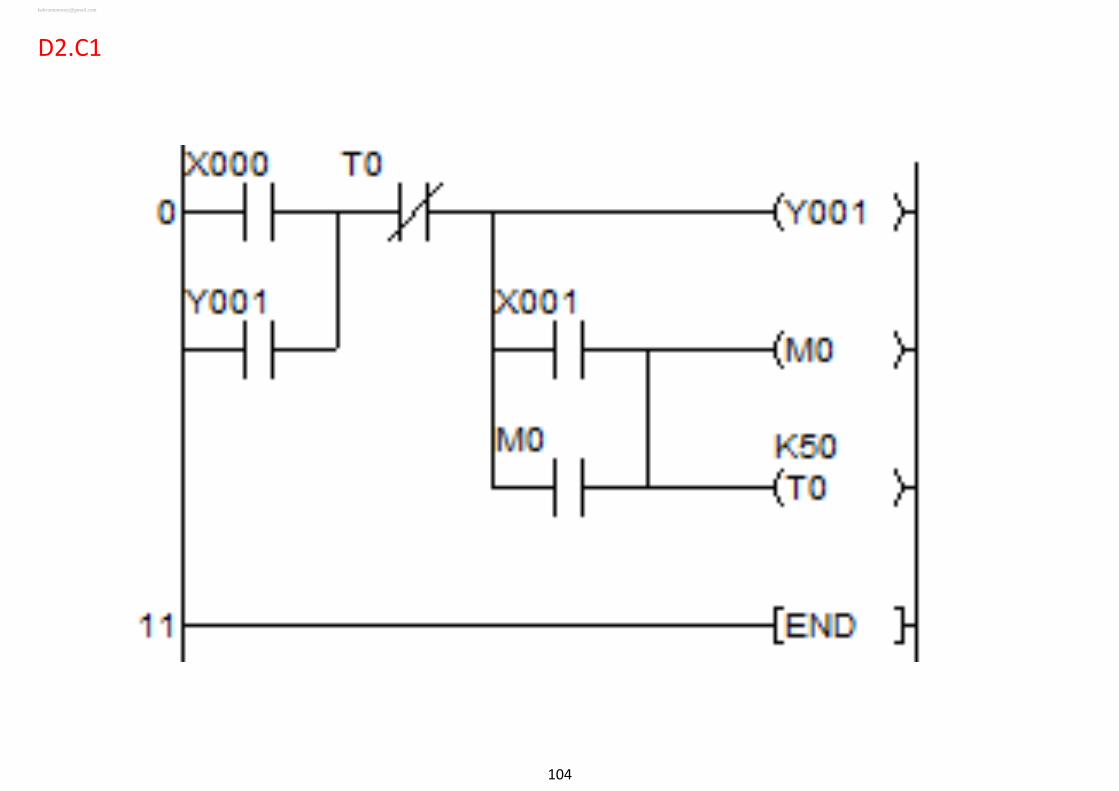
103
D2.S1
Kişi sağdan sola doğru hareket ederken, giriş
sensörü (X0) tarafından algılanınca yeşil lamba (Y1)
ışık verecek, çıkış sensörü (X1)tarafından
algılandıktan 5 saniye sonra sönecektir. Diyagramını
çizerek uygulayınız.
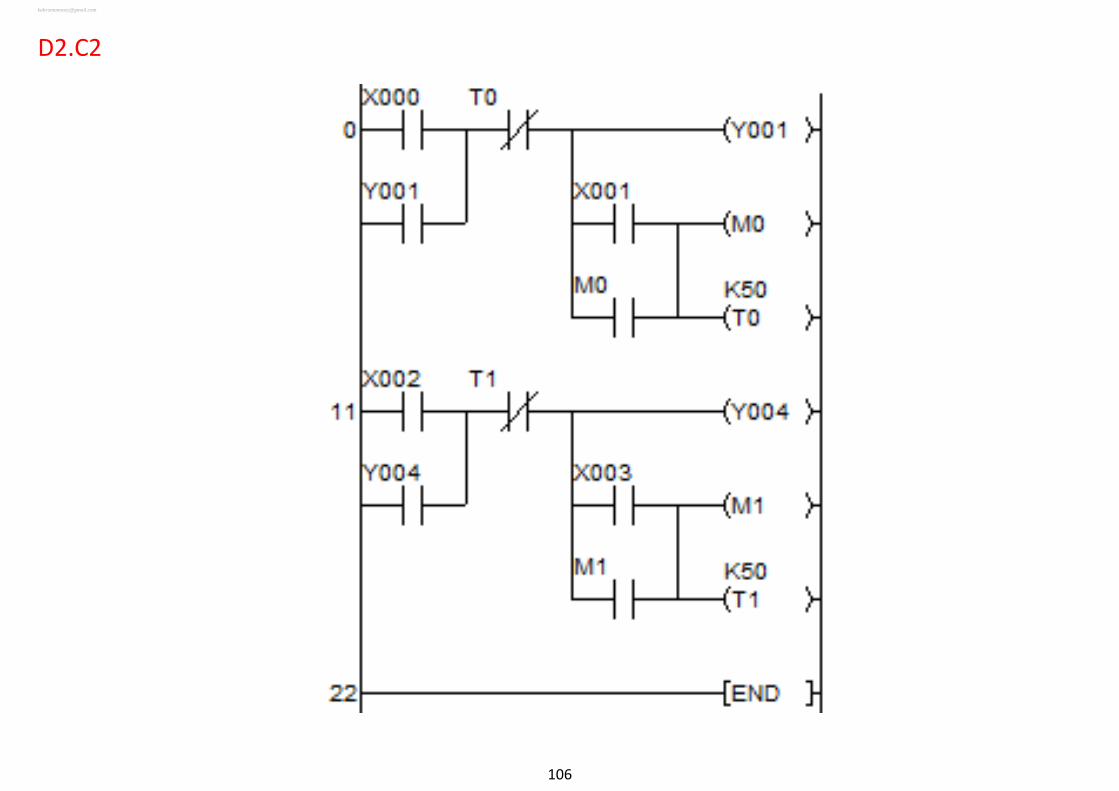
105
D2.S2
Kişi sağdan sola doğru hareket ederken, giriş
sensörü (X0) tarafından algılanınca, yaya için yeşil
lamba (Y1) ışık verecek, çıkış sensörü (X1)tarafından
algılandıktan 5 saniye sonra sönecektir. Araba soldan
sağa doğru hareket ederken, giriş sensörü (X2)
tarafından algılanınca araba için yeşil lamba (Y4) ışık
verecek, çıkış sensörü (X3) tarafından algılandıktan 5
saniye sonra sönecektir. Diyagramını çizerek
uygulayınız.
107
D2.S3
Araba soldan sağa doğru hareket ederken, giriş
sensörü (X2) tarafından algılanınca yeşil lamba (Y4)
yanacak, çıkış sensörü (X3) tarafından algılandıktan 5
saniye sonra sönecektir. Eğer araba, girdikten
itibaren 10 saniye içerisinde çıkış yapmaz ise, kırmızı
lamba (Y3) ile buzzer (Y7) de çalışacaktır. Bu durumda
olan arabanın çıkışı ile birlikte her iki lamba (Y3, Y4)
ile beraber sesli uyarı da (Y7)derhal duracaktır.
Diyagramı çizerek uygulayınız.
109
D2.S4
Araba soldan sağa doğru hareket ederken, giriş
sensörü (X2) tarafından algılanınca yeşil lamba (Y4)
yanacak, çıkış sensörü (X3) tarafından algılandıktan 5
saniye sonra sönecektir. Eğer araba, girdikten
itibaren 10 saniye içerisinde çıkış yapmaz ise, kırmızı
lamba (Y3) ile buzzer (Y7) de çalışacaktır. Bu durumda
olan arabanın çıkışı ile birlikte kırmızı lamba (Y3) ile
beraber sesli uyarı da (Y7)derhal duracaktır. Yeşil
lamba (Y4)çıkıştan 5 saniye sonra sönecektir.
Diyagramı çizerek uygulayınız.

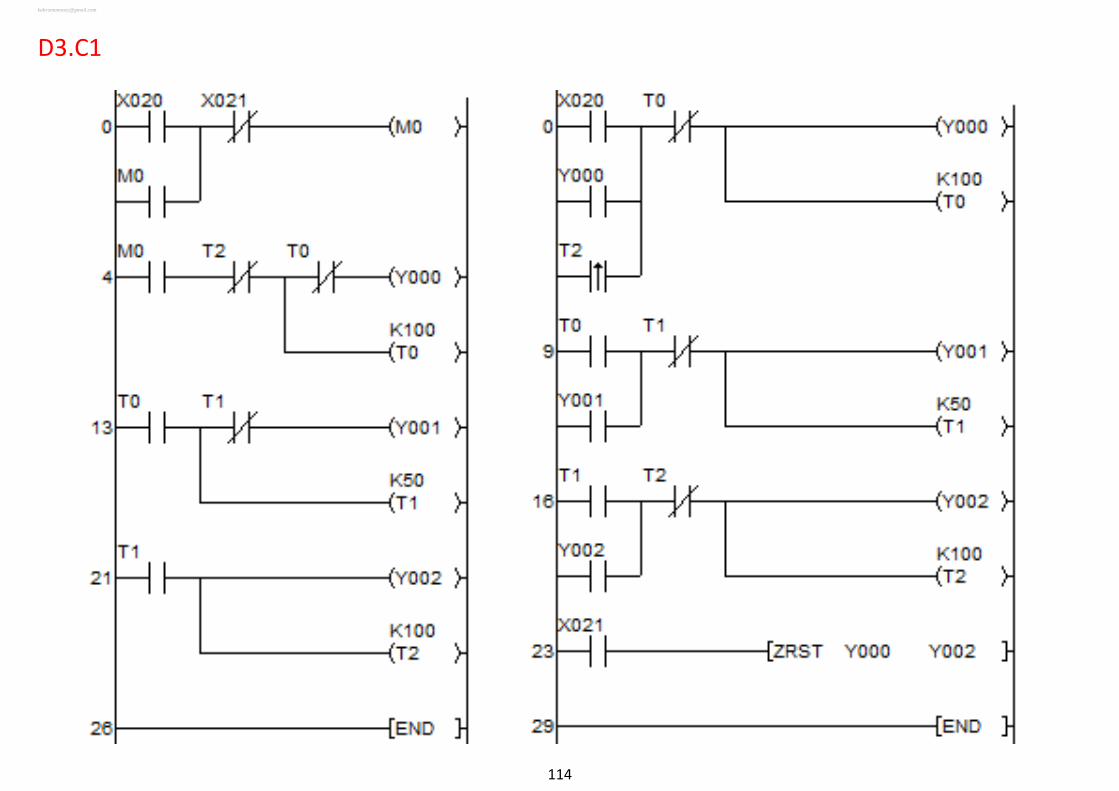
113
D3.S1
Trafik ışıkları şu şekilde çalışacaktır; Operasyon
paneli üzerindeki [PB1] X20 butonuna basılır basılmaz
kırmızı lamba (Y0), 10 saniye süre ile yanacak, süre
sonunda kırmızı lamba sönüp 5 saniye süre ile sarı
lamba (Y1) yanacak, 5 saniye dolunca sarı lamba da
sönüp 10 saniye süre ile yeşil lamba (Y2) yanacak,
süre sonunda yeşil lamba da sönüp yeniden kırmızı
lamba yanacak. Bu şekildeki çalışma [PB2] X21
durdurma butonuna basılıncaya kadar devam edecek.
Diyagramını çizerek uygulayınız.

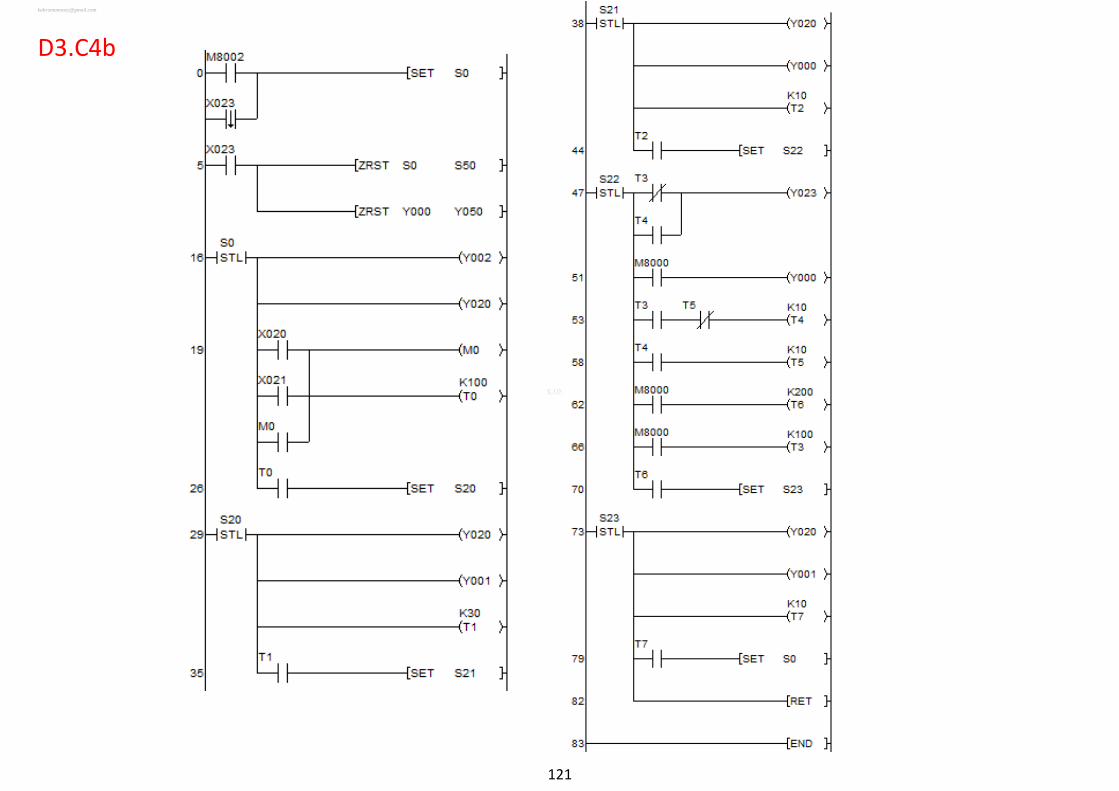
115
D3.S2
Trafik ışıkları şu şekilde çalışacaktır; Operasyon paneli
üzerindeki [PB1] X20 butonuna basılır basılmaz kırmızı lamba
(Y0), 10 saniye süre ile yanacak, süre sonunda kırmızı lamba
sönüp 5 saniye süre ile sarı lamba (Y1) yanacak, 5 saniye
dolunca sarı lamba da sönüp 10 saniye süre ile yeşil lamba (Y2)
yanacak, Ancak, yeşil lamba 4 saniye yandıktan sonra 1 saniye
yanık 1 saniye sönük olacak şekilde 10 saniyeyi tamamlayacak,
süre sonunda yeşil lamba da sönüp yeniden kırmızı lamba
yanacak. Bu şekildeki çalışma [PB2] X21 durdurma butonuna
basılıncaya kadar devam edecek. Diyagramını çizerek
uygulayınız.
117
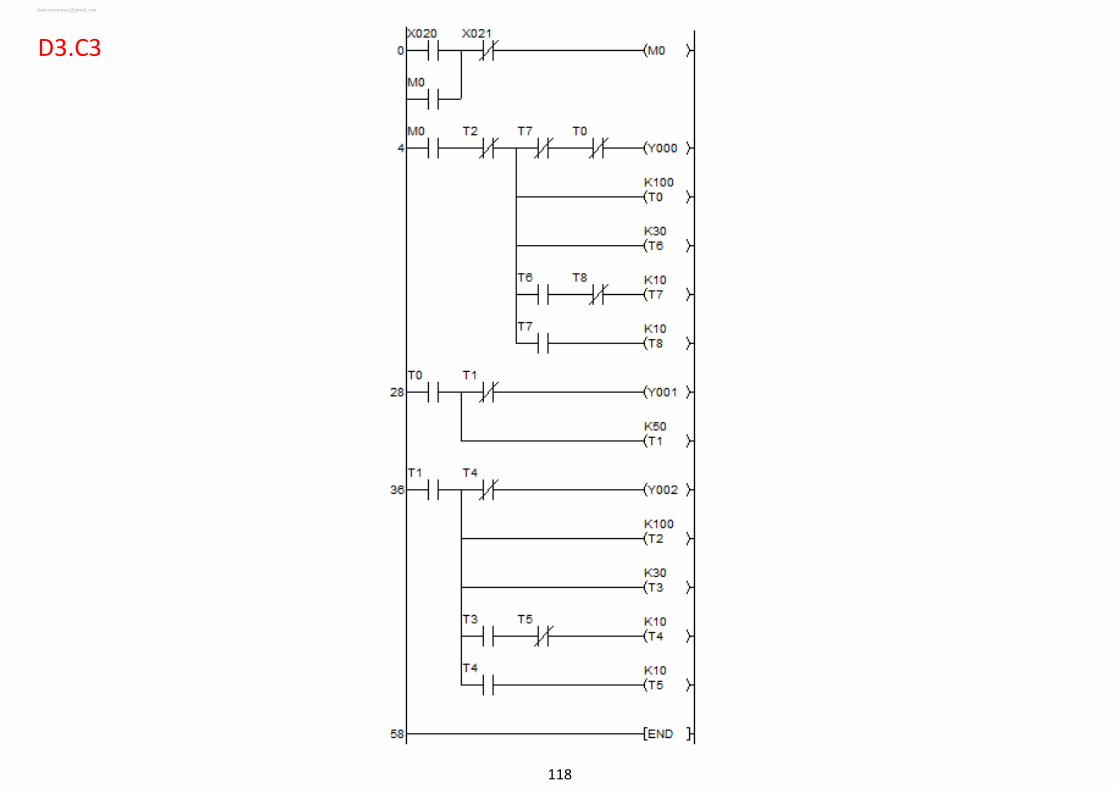
D3.S3
Trafik ışıkları şu şekilde çalışacaktır; Operasyon paneli üzerindeki
[PB1] X20 butonuna basılır basılmaz kırmızı lamba (Y0), 10
saniye süre ile yanacak ancak, kırmızı lamba 4 saniye yandıktan
sonra 1 saniye yanık 1 saniye sönük olacak şekilde 10 saniyeyi
tamamlayacak, süre sonunda kırmızı lamba sönüp 5 saniye süre
ile sarı lamba (Y1) yanacak, 5 saniye dolunca sarı lamba da
sönüp 10 saniye süre ile yeşil lamba (Y2) yanacak, Ancak, yeşil
lamba da 4 saniye yandıktan sonra 1 saniye yanık 1 saniye sönük
olacak şekilde 10 saniyeyi tamamlayacak, süre sonunda yeşil
lamba da sönüp yeniden kırmızı lamba yanacak. Bu şekildeki
çalışma [PB2] X21 durdurma butonuna basılıncaya kadar devam
edecek. Diyagramını çizerek uygulayınız.

119
D3.S4 Trafik Işıkları aşağıda anlatıldığı şekilde çalışacaktır. (X22 başlatma, X23
durdurma butonu olacak)
Başlangıçta arabalar için yeşil ışık (Y2), yayalar için ise kırmızı ışık (Y20)
yanacaktır.
1- Eğer yaya tarafından, yol kenarlarındaki X20 yada X21 butonlarından
herhangi birine basılır ise, butona basılma anından itibaren 10 saniye sonra,
arabalara olan ışık sarıya(Y1) dönecek, 3 saniye sonra da kırmızıya (Y0)
dönecek, arabalara kırmızı yandıktan 1 saniye sonra yayalara yeşil ışık (Y23)
yanacak. Bu ışık 10 saniye kesintisiz yandıktan sonra, birer saniye aralıklarla
5 defa da kesintili olarak yanacak. Süre sonunda yayalara olan ışık kırmızıya
dönecek, aynı anda arabalara olan ışık sarıya, 1 saniye sonrasında da yeniden
yeşile dönecek.
2- Sistem bu şekilde çalışmasını X23 durdurma butonuna basılıncaya kadar
devam ettirecek. Diyagramı çizerek uygulayınız.

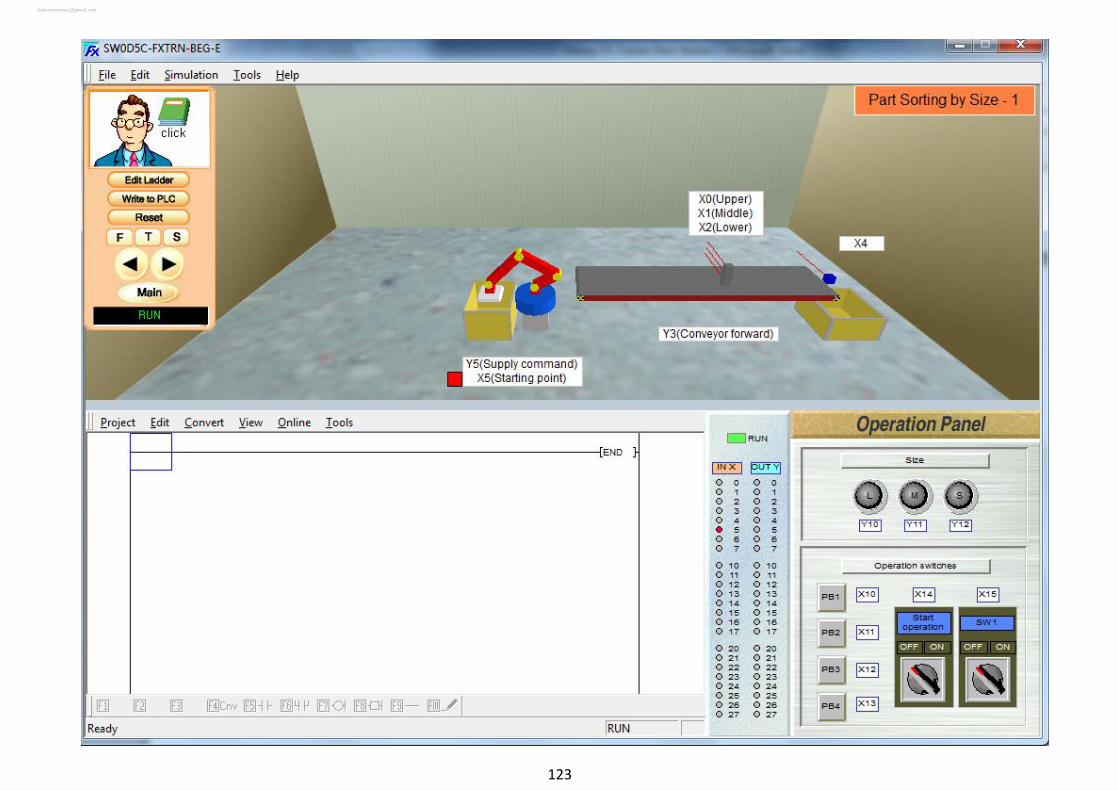
124
D4.S1
X10 başlatma butonuna basıldığında, robot
yürüyen banda parça yüklemesi (Y5) yapacak,
operasyon başlatma anahtarı (X14) “ON” yapılınca
yürüyen bant (Y3) çalışacak, “OFF” yapılınca duracak.
Yüklenen paçanın boyu, yüksek ise L lambası (Y10),
orta ise M lambası (Y11), küçük ise S lambası (Y12)
ışık verecek ve bu lambaların ışığı, parçalar yürüyen
banttan düşünce (X4) kendiliğinden sönecek.
Diyagramı çizerek uygulayınız.

127
D4.S2
X10 başlatma butonuna basıldığında, robot yürüyen
banda parça yüklemesi (Y5) yapacak, operasyon başlatma
anahtarı (X14) “ON” yapılınca yürüyen bant (Y3) çalışacak,
“OFF” yapılınca duracak. Yüklenen paçanın boyu, yüksek
ise L lambası (Y10), orta ise M lambası (Y11), küçük ise S
lambası (Y12) ışık verecek ve bu lambaların ışığı, parçalar
yürüyen banttan düşünce (X4) kendiliğinden sönecek.
Yürüyen banttan parçanın düşmesi ile birlikte, robot yeni
parçayı otomatik olarak yüklesin. Diyagramı çizerek
uygulayınız.

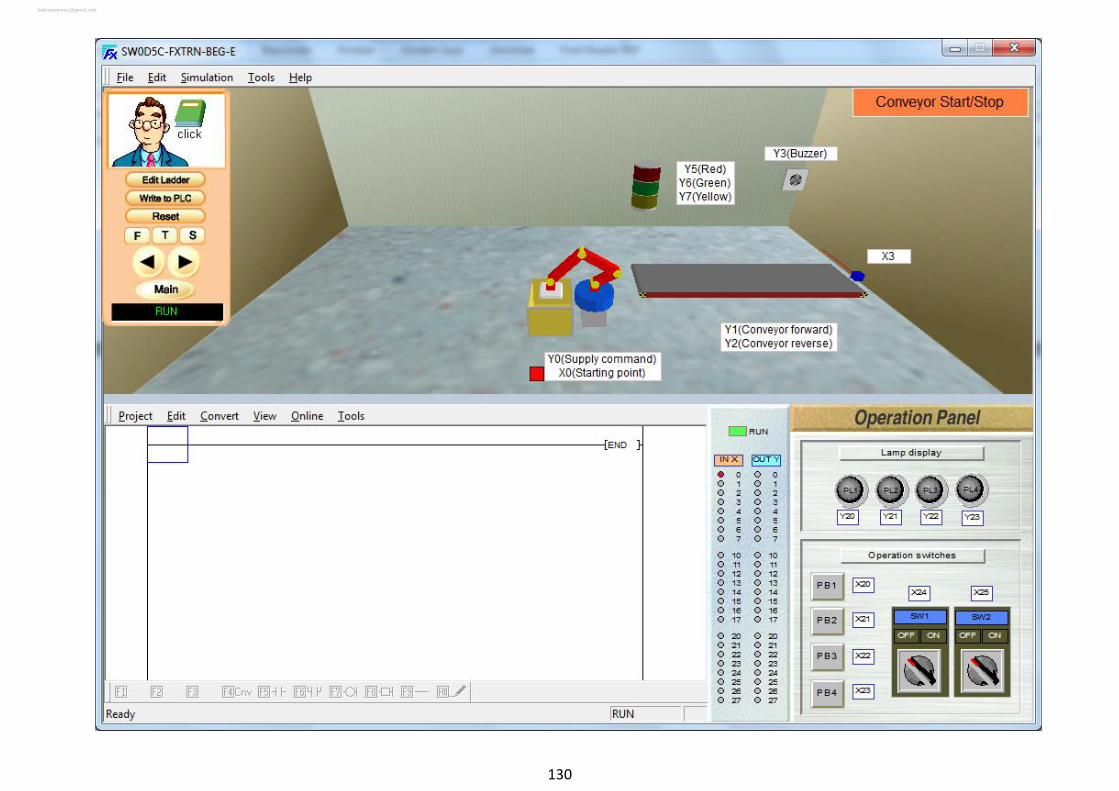
131
D5.S1
X20 Başlatma butonuna basılınca, sarı lamba (Y7)
ışık verecek ve aynı anda buzzer de (Y3) ses çıkaracak.
5 saniye sonra bu ikisi de “OFF” olacaklar ve yürüyen
bant (Y1) ileri yönde çalışmaya başlayacak, aynı anda
yeşil lamba (Y6) da ışık verecek. Eğer X21 durdurma
butonuna herhangi bir anda basılacak olursa, çalışan
tüm elemanlar devre dışı kalacak, yeniden başlatma
butonuna basılır ise sistem tekrar çalışabilecek.
Diyagramını çizerek uygulayınız.

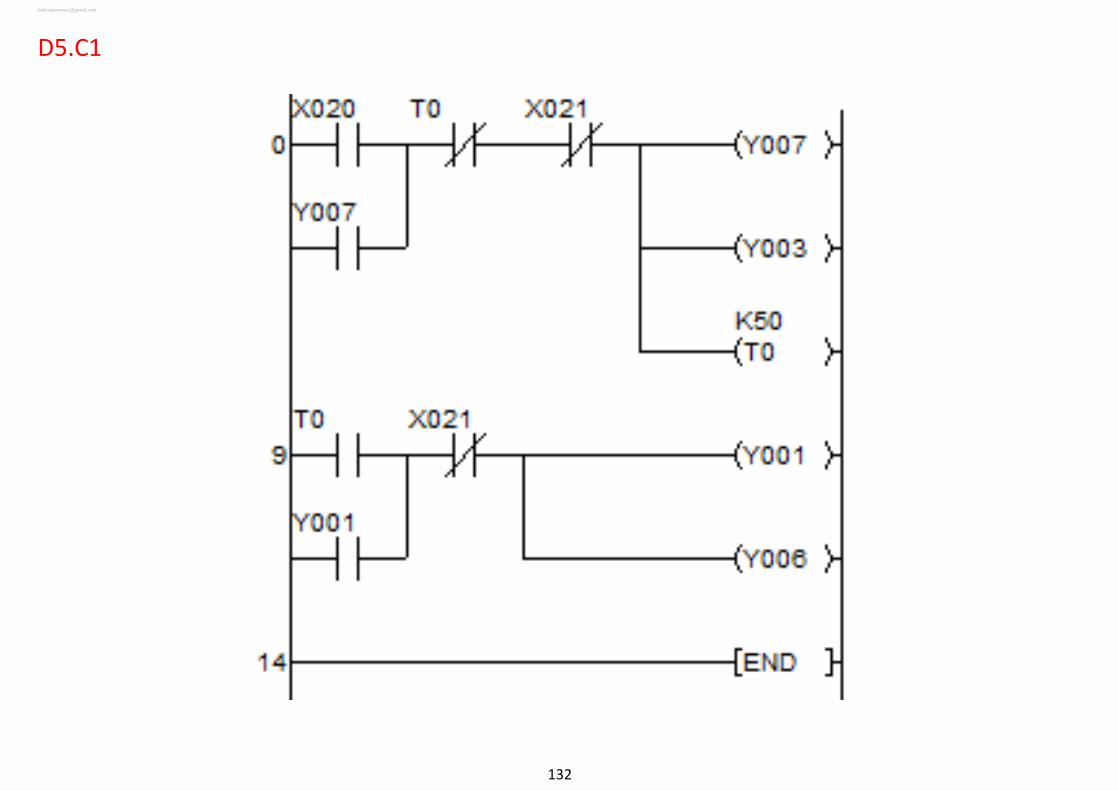
133
D5.S2
X20 Başlatma butonuna basılınca, sarı lamba (Y7) ışık verecek ve
aynı anda buzzer de (Y3) ses çıkaracak. 5 saniye sonra bu ikisi de
“OFF” olacaklar ve yürüyen bant (Y1) ileri yönde çalışmaya
başlayacak, aynı anda yeşil lamba (Y6) da ışık verecek. Yürüyen bant
çalışmaya başladıktan 5 saniye sonra, robot iş parçası yüklemesi
yapacak, iş parçası yüklenirken kırmızı lamba da (Y5) ışık verecek, iş
parçası banttan düştüğü zaman robot yenisini yükleyecek, bu işlem
X21 durdurma butonuna basılıncaya kadar devam edecek. Durdurma
butonuna herhangi bir anda basılacak olursa, çalışan tüm elemanlar
devre dışı kalacak, yeniden başlatma butonuna basılır ise sistem
tekrar çalışabilecek. Diyagramını çizerek uygulayınız.

135
D5.S3
X20 Başlatma butonuna basılınca, sarı lamba (Y7) ışık verecek ve
aynı anda buzzer de (Y3) ses çıkaracak. 5 saniye sonra bu ikisi de
“OFF” olacaklar ve yürüyen bant (Y1) ileri yönde çalışmaya
başlayacak, aynı anda yeşil lamba (Y6) da ışık verecek. Yürüyen bant
çalışmaya başladıktan 5 saniye sonra, robot iş parçası yüklemesi
yapacak, iş parçası yüklenirken kırmızı lamba da (Y5) ışık verecek, iş
parçası banttan düştüğü zaman robot yenisini yükleyecek, bu işlem
X21 durdurma butonuna basılıncaya kadar veya düşen iş parçası
sayısı 10 oluncaya kadar devam edecek. Durdurma butonuna
herhangi bir anda basılacak olursa, çalışan tüm elemanlar devre dışı
kalacak, yeniden başlatma butonuna basılır ise sistem tekrar
çalışabilecek. Diyagramını çizerek uygulayınız.
139
D6.S1
X20 başlatma butonuna basılır basılmaz, eğer robot
başlangıç pozisyonunda (X5)ise, robot besleme (Y7) komutu
çalışacak ve iş parçası üst yürüyen banda konulacak. Bu
banttaki sensör (X0) iş parçasını hissettiği zaman, bant
yürüyecek, orta banttaki sensör (X1) parçayı algıladığında,
üstteki yürüyen bandı durdurup, orta bandı çalıştıracak. Alt
banttaki sensör (X2) parçayı algıladığında, üstteki bandı
durdurup , alt bandı çalıştıracak. Kutu içerisindeki sensör
(X3) parçayı algıladığında ise, alt bandı durduracak, eğer
robot başlangıç pozisyonunda ise, yeni iş parçasını
koyduracak. Diyagramı çizerek uygulayınız.

141
D6.S2
X20 başlatma butonuna basılır basılmaz, eğer robot başlangıç
pozisyonunda (X5)ise, robot besleme (Y7) komutu çalışacak ve iş
parçası üst yürüyen banda konulacak. Bu banttaki sensör (X0) iş
parçasını hissettiği zaman, bant yürüyecek, orta banttaki sensör (X1)
parçayı algıladığında, üstteki yürüyen bandı durdurup, orta bandı
çalıştıracak. Alt banttaki sensör (X2) parçayı algıladığında, üstteki
bandı durdurup , alt bandı çalıştıracak. Kutu içerisindeki sensör (X3)
parçayı algıladığında ise, alt bandı durduracak, eğer robot başlangıç
pozisyonunda ise, yeni iş parçasını koyduracak. Üst bant ile beraber
PL1 (Y20), orta bant ile beraber PL2 (Y21), alt bant ile beraber de PL3
(Y22) lambaları ışık versin. Diyagramı çizerek uygulayınız.
143
D6.S3
X20 başlatma butonuna basıldığında, robot başlangıç
pozisyonunda (X5) ise, parça yüklemesini yapsın. (Y7) Üst
yürüyen banttaki sensör (X0) parçayı algıladıktan 2 saniye
sonra bu bant (Y0) hareket etsin, orta bant sensörü (X1)
parçayı algılar algılamaz üst bandı durdursun ve 2 saniye
sonra orta bandı (Y2) çalıştırsın. Alt bant sensörü (X2)de
parçayı algıladığında orta bandı durdursun ve alt bandı
(Y4) 2 saniye sonra çalıştırsın. Toplama kutusu içerisindeki
sensör (X3) parçayı algılar algılamaz alt bandı durdursun .
X20 ile tekrar besleme yapılabilsin. Diyagramını çizerek
uygulayınız.
145
D6.S4
X20 başlatma butonuna basıldığında, robot başlangıç
pozisyonunda (X5) ise, parça yüklemesini yapsın. (Y7) Üst
yürüyen banttaki sensör (X0) parçayı algıladıktan 2 saniye sonra
bu bant (Y0) hareket etsin, orta bant sensörü (X1) parçayı algılar
algılamaz üst bandı durdursun ve 2 saniye sonra orta bandı (Y2)
çalıştırsın. Alt bant sensörü (X2)de parçayı algıladığında orta
bandı durdursun ve alt bandı (Y4) 2 saniye sonra çalıştırsın.
Toplama kutusu içerisindeki sensör (X3) parçayı algılar algılamaz
alt bandı durdursun . Üst bant çalışırken PL1 (Y20), orta bant
çalışırken PL2 (Y21) ve alt bant çalışırken de PL3 (Y22) ışık versin.
X20 ile tekrar besleme yapılabilsin. Diyagramını çizerek
uygulayınız.
147
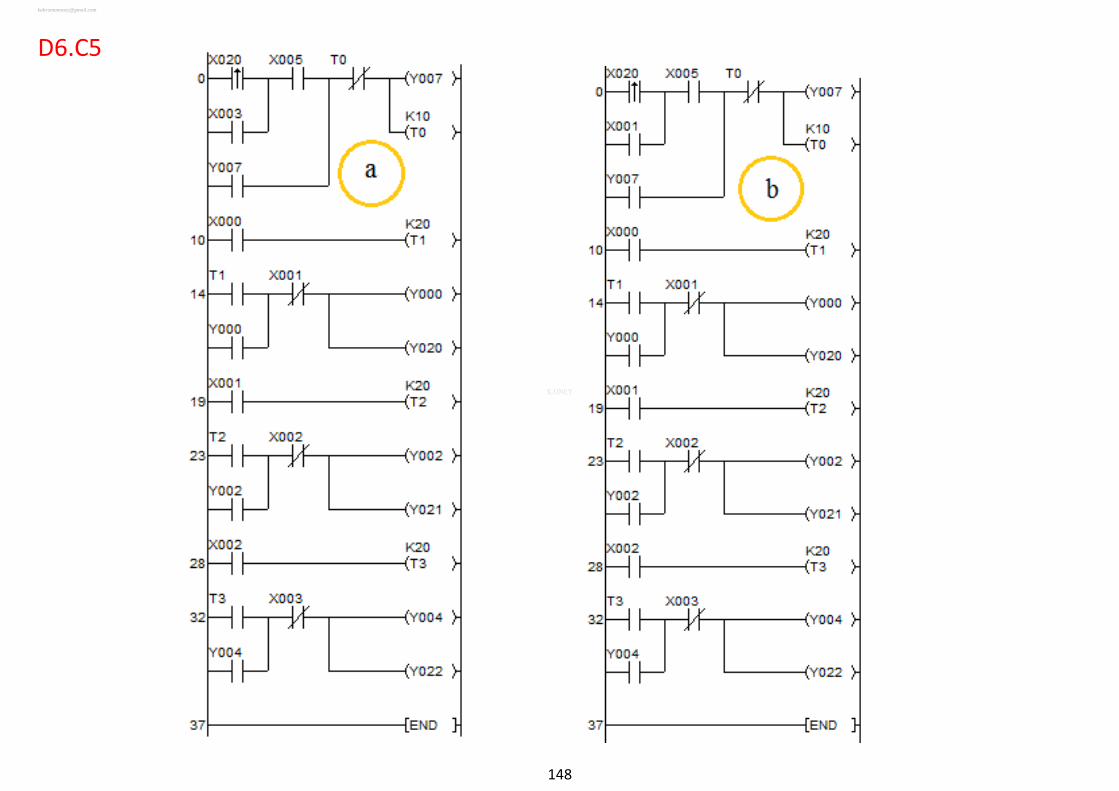
D6.S5
D6.S4 e ek olarak, a) parça toplama kutusu
içerisine düştüğü zaman, b) parça orta yürüyen bant
sensörü tarafından algılandığı zaman robot otomatik
olarak yeni parçayı koysun. Uygulayınız.

149
D6.S6
D6.S5 e ek olarak, herhangi bir anda durdurma
butonu (X21) e basılır ise, robot yeni parça yüklemesi
yapmasın, yüklenmiş olan parçaların hepsi toplama
kutusuna varıncaya kadar geri kalan sistem çalışsın.
Uygulayınız.
151
D6.S7
Yukarıdaki soruya ek olarak, kutuya düşen parça
sayısı 5 olunca sistem otomatik olarak dursun.
Uygulayınız.

155
E1.S1
PLC RUN moduna alındığında (herhangi bir butona
basılmadan), kırmızı lamba (Y0) 1 saniye “ON”, 1 saniye
“OFF” olacak şekilde sürekli çalışsın. İşlem paneli
üzerindeki X10 butonuna basılır ise, aynı paneldeki Y10
çıkışı “ON” olsun. Y10 çıkışı “ON” olduğu andan itibaren, 5
saniye süre ile kırmızı lamba başlangıçtaki gibi çalışsın.
(flaşör) süre dolunca kırmızı lamba sönsün, 5 saniye süre
ile sarı lamba (Y1) yansın, sarı lamba sönünce de 10 saniye
süre ile yeşil lamba (Y2) ışık versin. Süre sonunda işlem
başa dönsün. Uygulayınız.

158
E1.S2
Trafik ışıkları aşağıdaki şekilde çalışacaktır; PLC RUN moduna
alınır alınmaz 6 saniye süre ile kırmızı ışık (Y0), o sönüp 3 saniye
süre ile sarı ışık (Y1), o da sönüp 10 saniye süre ile yeşil ışık (Y2)
çalışacak, süre sonunda sistem yeniden kırmızı ışık ile başa
dönecek. Eğer herhangi bir anda, operasyon paneli üzerindeki
X10 butonuna basılır ise, Y10 çıkışı “ON” olacak, trafik ışıkları 15
saniye süre ile normal çalışmasına devam edecek, süre sonunda
çalışan ışık sarıya dönecek ve bu ışık da 1er saniye aralıklarla
“ON”, “OFF” olacak, toplam flaşör süresi 5 saniye olunca, sarı
lamba sönüp kırmızı lamba yanacak. (Arabalar için) 10 saniye
boyunca kırmızı yandıktan sonra, sistem başa dönecek.
Uygulayınız.
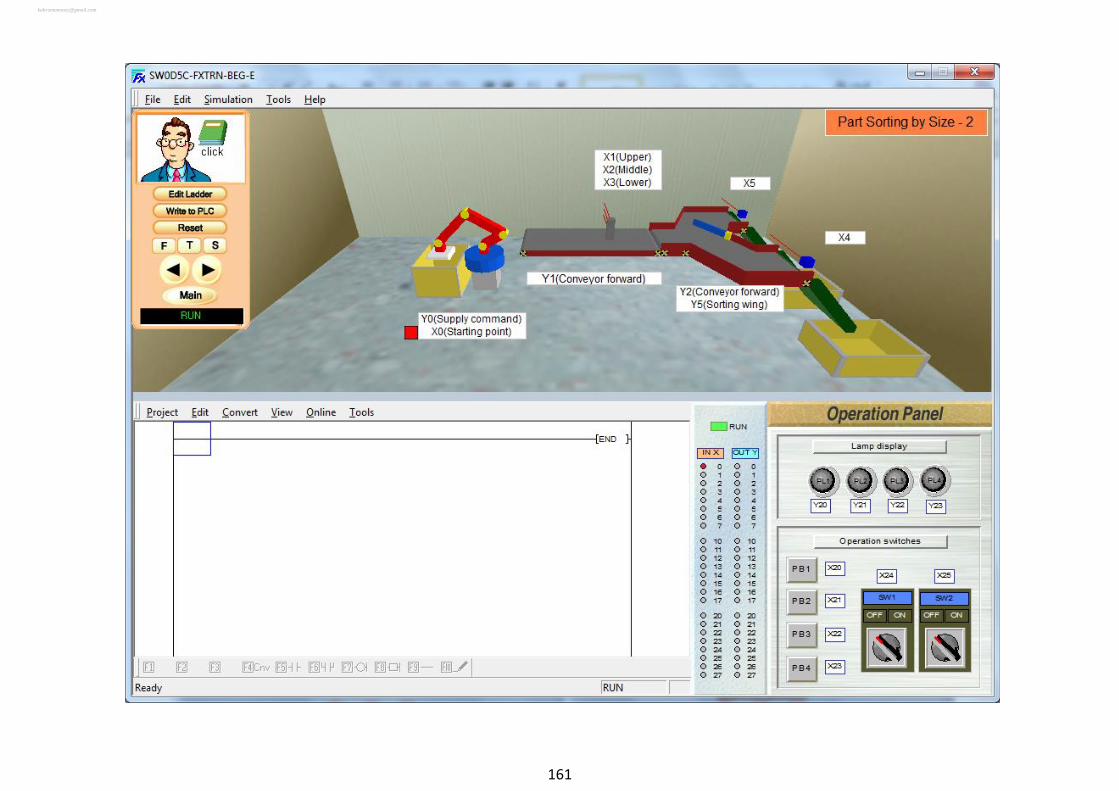
162
E2.S1
Operasyon paneli üzerindeki X24 şalteri “ON” yapıldığı
zaman, yürüyen bantlar (Y1, Y2) çalışmaya başlayacak.
Şalter “OFF” yapılır ise bantlar da duracak. X20 butonuna
basıldığında robot parça beslemesi (Y0) yapacak. Robot
tarafından, küçük, orta ve büyük parçalar yürüyen banda
rastgele konulacak. Eğer konulan parça büyük ise (X1, X2
ve X3 aynı anda algılıyor ise) bu parça arkadaki kutuya
gönderilecek. (Y5 “ON” yapılarak) Eğer parça küçük ise
(Sadece X3 sensörü algılıyor ise) bu parça ön kutuya
alınacak. (Y5 “OFF” yapılarak) Uygulayınız.

164
E2.S2
Operasyon paneli üzerindeki X24 şalteri “ON” yapıldığı
zaman, yürüyen bantlar (Y1, Y2) çalışmaya başlayacak. Şalter
“OFF” yapılır ise bantlar da duracak. X20 butonuna basıldığında
robot parça beslemesi (Y0) yapacak. Robot tarafından, küçük,
orta ve büyük parçalar yürüyen banda rastgele konulacak. Eğer
konulan parça büyük ise (X1, X2 ve X3 aynı anda algılıyor ise) bu
parça arkadaki kutuya gönderilecek. (Y5 “ON” yapılarak) Eğer
parça küçük ise (Sadece X3 sensörü algılıyor ise) bu parça ön
kutuya alınacak. (Y5 “OFF” yapılarak) İlk parça beslemesinden
sonraki parçaların otomatik olarak yüklenmesini istiyoruz.
Uygulayınız.

166
E2.S3
Programı, aşağıda açıklanan tüm koşulları gerçekleştirecek şekilde dizayn ediniz.
1) X24 Şalteri “ON” yapılır ise, yürüyen bantlar (Y1 – Y2) çalışacak, aynı anda
PL4 (Y23) lambası ışık verecek. Şalter “OFF” olursa, bantlar duracak ve ışık
sönecek.
2) PB1 (X20) Butonuna basılır ve robot başlangıç pozisyonunda ise, robot iş
parçasını yürüyen banda yükleyecek, aynı anda 2 saniye süre ile PL1 (Y20)
lambası ışık verecek.
3) İş parçası büyük ise (X1, X2,X3 aynı anda algılıyor ise) parça arka kutuya
gönderilecek (Y5 “ON” yapılarak), eğer parça küçük ise (sadece X3 algılıyor ise)
bu durumda da ön kutuya (Y5 “OFF” yapılarak) gönderilecek.
4) İş parçası ön kutuya gidiyor ise, düşme sensörü (X4) algıladıktan itibaren 2
saniye süre ile PL2 (Y21) lambası ışık verecek. Arka kutuya gidiyor ise de,
sensör (X5) algıladıktan itibaren 2 saniye süre ile PL3 (Y22) lambası ışık
verecek.
Diyagramını çizerek uygulayınız.

168
E2.S4
Programı, aşağıda açıklanan tüm koşulları gerçekleştirecek şekilde dizayn ediniz.
1) X24 Şalteri “ON” yapılır ise, yürüyen bantlar (Y1 – Y2) çalışacak, aynı anda PL4 (Y23)
lambası ışık verecek. Şalter “OFF” olursa, bantlar duracak ve ışık sönecek.
2) PB1 (X20) Butonuna basılır ve robot başlangıç pozisyonunda ise, robot iş parçasını
yürüyen banda yükleyecek, aynı anda 2 saniye süre ile PL1 (Y20) lambası ışık verecek.
3) İş parçası büyük ise (X1, X2,X3 aynı anda algılıyor ise) parça arka kutuya gönderilecek
(Y5 “ON” yapılarak), eğer parça küçük ise (sadece X3 algılıyor ise) bu durumda da ön
kutuya (Y5 “OFF” yapılarak) gönderilecek.
4) İş parçası ön kutuya gidiyor ise, düşme sensörü (X4) algıladıktan itibaren 2 saniye süre
ile PL2 (Y21) lambası ışık verecek. Arka kutuya gidiyor ise de, sensör (X5) algıladıktan
itibaren 2 saniye süre ile PL3 (Y22) lambası ışık verecek.
5) Kutulara gelen parça sayısı 5 olunca, ona ait sinyal lambası (Ön kutu için Y21, arka için
Y22) sürekli yanmaya başlayacak, her ikisi de 5 parçayı bulunca, her iki lamba da sürekli
yanmaya başlayacak. Bundan sonraki ilk yüklemede, her iki sinyal lambası da
başlangıçtaki gibi 2 şer saniye süre ile yanmaya başlayacak. (önce her ikisi de sönecek,
sensörü algıladıktan sonra çalışmaya başlayacak.)
Diyagramını çizerek uygulayınız.
172
E3.S1
Programı, aşağıda açıklanan tüm koşulları gerçekleştirecek şekilde dizayn ediniz.
1) “Supply Allowed” (Parça beslemesi izinli) göstergesi ışık verdiği sürece,
tedarik yapılacak. Bu ışık sürekli yanıyor ise, sürekli parça beslemesi (Y0)
yapılacak.
2) PLC “RUN” modunda olduğu sürece, yürüyen bant (Y1) çalışacak.
3) Operasyon panelindeki PB1 (X20) butonu “ON” yapılır ise, parça beslemesi
(Y0) gerçekleştirilecek ve göstergesi de ışık verecek. Eğer PB1 butonu “OFF”
yapılır ise, gösterge ışığı sönecek, parça beslemesi de yapılmayacak. Eğer iş
parçası robot önündeki masada ise, besleme yapılamayacak.
4) Yürüyen bant üzerindeki parça, banttan, robot önündeki masaya geçtiği
zaman (X1), robot iş parçasını bu masa üzerinden alacak (Y2 – set ).
Operasyon bitti sensörü (X2) “ON” olduğu zaman, robotun parçayı alma
işlemi sonlandırılacak. (Y2 – reset) Robotun iş parçasını masa üzerinden
alma işlemi, sadece robot başlangıç noktasında (X0) ise gerçekleşebilecek. Diyagramını çizerek uygulayınız.

174
E3.S2
Programı, aşağıda açıklanan tüm koşulları gerçekleştirecek şekilde dizayn ediniz.
1) X20 başlatma butonuna basılır ise yürüyen bant
(Y1)çalışmaya başlayacak ve aynı anda PL4 (Y23) ışık
verecek.
2) Robot başlangıç noktasında (X0) ve robot yanındaki masa
üzeri boş olduğu olduğu sürece (X1), parça beslemesi (Y0)
otomatik olarak gerçekleşecek.
3) Robot başlangıç noktasında (X0) ve iş parçası da masa
üzerinde (X1) ise, robot parçayı alarak (Y2) kutuya aktaracak,
işlem bitti sinyali (X2) alınca parça alma (Y2) işlemi
sonlanacak.
4) X21 butonu sistemi durdurma amacıyla kullanılacak. Diyagramını çizerek uygulayınız.

178
E4.S1
Besleme gözü tarafından gelen iş parçasının delinmesi;
1- X20 başlatma butonuna basıldığı zaman, besleme silosundan yürüyen bant
üzerine parça bırakılacak (Y0) , X20 bırakıldığı zaman besleme yapılmayacak.
2- Operasyon paneli üzerindeki X24 şalteri “ON” yapılınca, yürüyen bant (Y1)
çalışmaya başlayacak, şalter “OFF” yapılınca yürüyen bant da duracak.
3- Parça matkabın altında sensörü (X1) parçayı algıladığı anda yürüyen bant
duracak.
4- Parça matkabın altında ise ve X21 butonuna basılmış ise, matkap parçayı
delecek, matkap, parça delindi (X0) sensörü tarafından otomatik olarak
durdurulacak.
5- Matkap parçayı deldikten sonra, otomatik olarak, ya parça doğru delindi (X2)
yada parça yanlış delindi (X3) sensörü aktif olacak. (Program tarafından)
6- Delinme işlemi bittikten sonra, X22 butonuna basılır ise, parça yürüyen bant
ile hareket ederek kutuya düşecek. Ladder diaygramını çizerek uygulayınız.

180
E4.S2
Besleme gözü tarafından gelen iş parçasının delinmesi;
1- X20 başlatma butonuna basıldığı zaman, besleme silosundan yürüyen bant
üzerine parça bırakılacak (Y0) , X20 bırakıldığı zaman besleme yapılmayacak.
2- Operasyon paneli üzerindeki X24 şalteri “ON” yapılınca, yürüyen bant (Y1)
çalışmaya başlayacak, şalter “OFF” yapılınca yürüyen bant da duracak.
3- Parça matkabın altında sensörü (X1) parçayı algıladığı anda yürüyen bant
duracak. Matkap parçayı delecek (Y2), matkap, parça deliniyor (X0) sensörü
tarafından otomatik olarak durdurulacak.
4- Matkap parçayı deldikten sonra, otomatik olarak, ya parça doğru delindi (X2)
yada parça yanlış delindi (X3) sensörü aktif olacak. (Program tarafından)
5- Delinme işlemi biten parça, otomatik olarak yürüyen bant tarafından kutuya
atılacak (X5). Yeniden X20 butonuna basılır ise, yeni parça aynı şekilde
otomatik olarak delinip kutuya atılacak. Ladder diaygramını çizerek
uygulayınız.

182
E4.S3
Besleme gözü tarafından gelen iş parçasının delinmesi;
1- X20 başlatma butonuna basıldığı zaman, besleme silosundan yürüyen bant
üzerine parça bırakılacak (Y0) , X20 bırakıldığı zaman besleme yapılmayacak.
2- Operasyon paneli üzerindeki X24 şalteri “ON” yapılınca, yürüyen bant (Y1)
çalışmaya başlayacak, şalter “OFF” yapılınca yürüyen bant da duracak.
3- Parça matkabın altında sensörü (X1) parçayı algıladığı anda yürüyen bant
duracak. Matkap parçayı delecek (Y2), matkap, parça delindi (X0) sensörü
tarafından otomatik olarak durdurulacak.
4- Matkap parçayı deldikten sonra, otomatik olarak, ya parça doğru delindi (X2)
yada parça yanlış delindi (X3) sensörü aktif olacak. (Program tarafından)
5- Delinme işlemi biten parça, otomatik olarak yürüyen bant tarafından kutuya
atılacak (X5). Kutuya atma işlemi gerçekleştiği anda otomatik olarak yeni iş
parçası yürüyen banda konulacak. Ladder diaygramını çizerek uygulayınız.

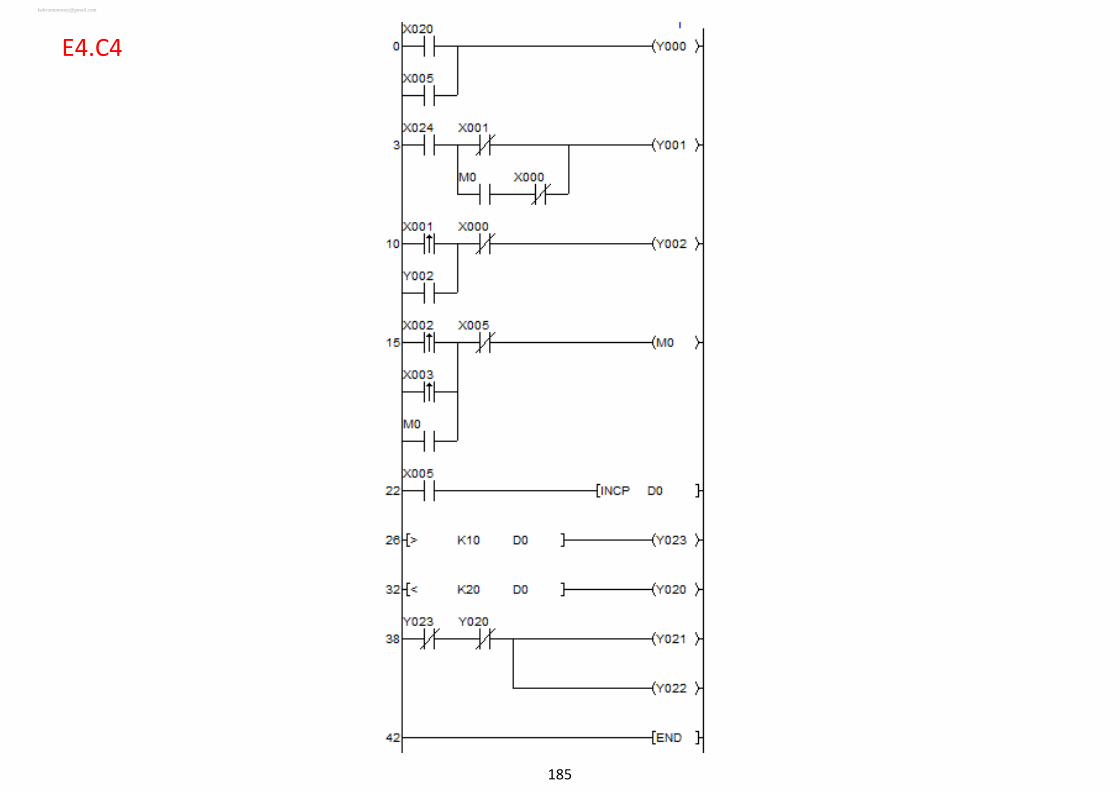
184
E4.S4
Bir önceki soruya aşağıda istenilenleri ekleyiniz;
Eğer kutuya atılan parça sayısı 10 dan az ise yeşil
lamba (Y23) ışık versin, parça sayısı 20 den fazla ise
kırmızı lamba (Y20) ışık versin, eğer atılan parça sayısı
bu iki sayı arasında ise, mavi ve sarı lambalar (Y21,
Y22) birlikte ışık versinler. Uygulayınız.

188
E5.S1
Aşağıdaki şartların hepsini gerçekleştirecek programı yapınız.
1- X24 şalteri “ON” yapılınca yürüyen bant (Y1) çalışmaya başlayacak,
“OFF” yapılınca duracak.
2- Operasyon paneli üzerindeki X20 girişi “ON” yapılınca, eğer robot
başlangıç pozisyonunda ise (X0), parça beslemesi (Y0) yapacak, robot
başlangıç pozisyonundan ayrıldığı zaman besleme komutu resetlenecek.
3- Turuncu besleyici içerisinde bulunan, yürüyen bant üzerindeki kutuyu
algılayan sensör (X1) “ON” olduğu zaman yürüyen bant duracak.
4- Turuncu kutu içerisine 5 adet portakal bırakılacak (Y2), beş portakal
içeren kutu sağa doğru ilerleyecek. (Portakalın bırakıldığını, X2 sensörü
ile algılayacağız). Diyagramını çizerek uygulayınız.

190
E5.S2
Aşağıdaki şartların hepsini gerçekleştirecek programı yapınız.
1- X24 şalteri “ON” yapılınca yürüyen bant (Y1) çalışmaya başlayacak,
“OFF” yapılınca duracak.
2- Operasyon paneli üzerindeki X20 girişi “ON” yapılınca, eğer robot
başlangıç pozisyonunda ise (X0), parça beslemesi (Y0) yapacak, robot
başlangıç pozisyonundan ayrıldığı zaman besleme komutu resetlenecek.
3- Turuncu besleyici içerisinde bulunan, yürüyen bant üzerindeki kutuyu
algılayan sensör (X1) “ON” olduğu zaman yürüyen bant duracak.
4- Turuncu kutu içerisine 5 adet portakal bırakılacak (Y2), beş portakal
içeren kutu sağa doğru ilerleyecek. (Portakalın bırakıldığını, X2 sensörü
ile algılayacağız.) Portakal kutusu yürüyen bandı terk edince yeni boş
kutunun otomatik olarak yüklenmesini istiyoruz. Diyagramını çizerek
uygulayınız.

192
E5.S3
Yukarıdaki soruya, aşağıda istenilenleri de ekleyiniz.
Yürüyen banttan aşağı düşen koli sayısı, Y20 den
itibaren Y23 e kadar olan lambalar üzerinde binary
olarak gösterilsin(1 koli düştü ise Y20, 2 koli düştü ise
Y21, 3 koli düştü ise Y20 ve Y21…), düşen koli sayısı
15 olunca, robot başka parça yüklemesi yapmasın.
Yeniden X20 başlatma butonuna basılır ise, devre
tekrar çalışabilsin.(Devrenin tamamında sadece 1
sayıcı kullanınız.) Uygulayınız.

196
E6.S1
Kontrol özelliğine göre yürüyen bandı ileri yada geriye doğru
çalıştırma,
1- Operasyon paneli üzerindeki X20 girişi “ON” yapıldığında,
silodan yürüyen banda parça beslemesi (Y10) gerçekleşecek. Giriş
“OFF” olduğunda besleme kesilecek.
2- X21 girişi “ON” yapıldığında, yürüyen bant ileri yönde (Y11)
çalışacak, sağ sınır anahtarı (X11)“ON” olduğunda yürüyen bant
durup geriye doğru (Y12) çalışacak, sol sınır anahtarı (X10) “ON”
olduğunda parça burada 5 saniye bekleyecek ve tekrar ileri yönde
çalışacak. İleri yönde çalışma, X12 durdurma sensörünü görünce
sonlanacak. Diyagramı çizerek uygulayınız.

198
E6.S2
Kontrol özelliğine göre yürüyen bandı ileri yada geriye doğru
çalıştırma,
1- Operasyon paneli üzerindeki X20 girişi “ON” yapıldığında,
silodan yürüyen banda sadece bir adet parça beslemesi (Y10)
gerçekleşecek. Giriş tekrar aktif edilse bile başka parça
beslemesi yapılamayacak.
2- Aynı anda yürüyen bant ileri yönde (Y11) çalışacak, sağ sınır
anahtarı (X11)“ON” olduğunda yürüyen bant durup geriye
doğru (Y12) çalışacak, sol sınır anahtarı (X10) “ON” olduğunda
duracak ve tekrar ileri yönde çalışacak. Bu şekildeki çalışma, X21
durdurma girişi “ON” oluncaya kadar devam edecek. Diyagramı
çizerek uygulayınız.

200
E6.S2b
Yukarıdaki soruya aşağıda istenileni ekleyiniz.
Sistem bir kez çalıştırılıp durdurulduktan sonra,
ikinci kez çalıştırma butonuna basılacak olursa,
yürüyen banda ikinci parça düşmesin, önceki düşen
parça sağa – sola çalışmaya devam etsin. Uygulayınız.

202
E6.S2c
Yukarıdaki soruya aşağıda istenileni ekleyiniz.
Çalışan sistem durdurma butonu ile
durdurulduktan sonra yeniden çalışma butonuna
basılacak olur ise, yürüyen bant hangi yöne çalışırken
durdurulmuş ise, aynı yöne çalışmaya devam etsin.
Uygulayınız.

204
E6.S3
Aşağıdaki şartların hepsini gerçekleştirecek programı oluşturunuz.
1- Operasyon paneli üzerindeki X20 girişi “ON” yapıldığında, silodan
yürüyen banda sadece bir adet parça beslemesi (Y10) gerçekleşecek.
Giriş tekrar aktif edilse bile başka parça beslemesi yapılamayacak.
2- Aynı anda yürüyen bant ileri yönde (Y11) çalışacak, sağ sınır anahtarı
(X11)“ON” olduğunda yürüyen bant durup geriye doğru (Y12) çalışacak,
sol sınır anahtarı (X10) “ON” olduğunda duracak ve tekrar ileri yönde
çalışacak. Bu şekildeki çalışma, X21 durdurma girişi “ON” oluncaya
kadar devam edecek.
3- Parçanın ileri yönde çalışma sayısı, sürekli olarak gösterge (Y0-Y7)
üzerinde görülecek.
4- İleri yön ile birlikte kırmızı lamba(Y20) ve geri yön ile birlikte de yeşil
lamba (Y23) ışık versin. Diyagramı çizerek uygulayınız.

206
E6.S4
Aşağıdaki şartların hepsini gerçekleştirecek programı oluşturunuz.
1- Operasyon paneli üzerindeki X20 girişi “ON” yapıldığında, silodan yürüyen banda
sadece bir adet parça beslemesi (Y10) gerçekleşecek. Giriş tekrar aktif edilse bile
başka parça beslemesi yapılamayacak.
2- Aynı anda yürüyen bant ileri yönde (Y11) çalışacak, sağ sınır anahtarı (X11)“ON”
olduğunda yürüyen bant durup geriye doğru (Y12) çalışacak, sol sınır anahtarı
(X10) “ON” olduğunda duracak ve tekrar ileri yönde çalışacak. Bu şekildeki
çalışma, X21 durdurma girişi “ON” oluncaya kadar devam edecek.
3- Parçanın ileri yönde çalışma sayısı, sürekli olarak gösterge (Y0-Y7) üzerinde
görülecek.
4- İleri yön ile birlikte kırmızı lamba(Y20) ve geri yön ile birlikte de yeşil lamba (Y23)
ışık versin.
5- İleri yöndeki çalışma sayısı 10 değerine ulaştığı anda, iş parçası sağ taraftan
aşağıya atılsın, hemen silodan yeni bir parça otomatik olarak bant üzerine insin,
bu parça da 10 kez sağ yapınca aşağı atılsın. Çalışma bu şekilde sürekli olsun.
Diyagramı çizerek uygulayınız.

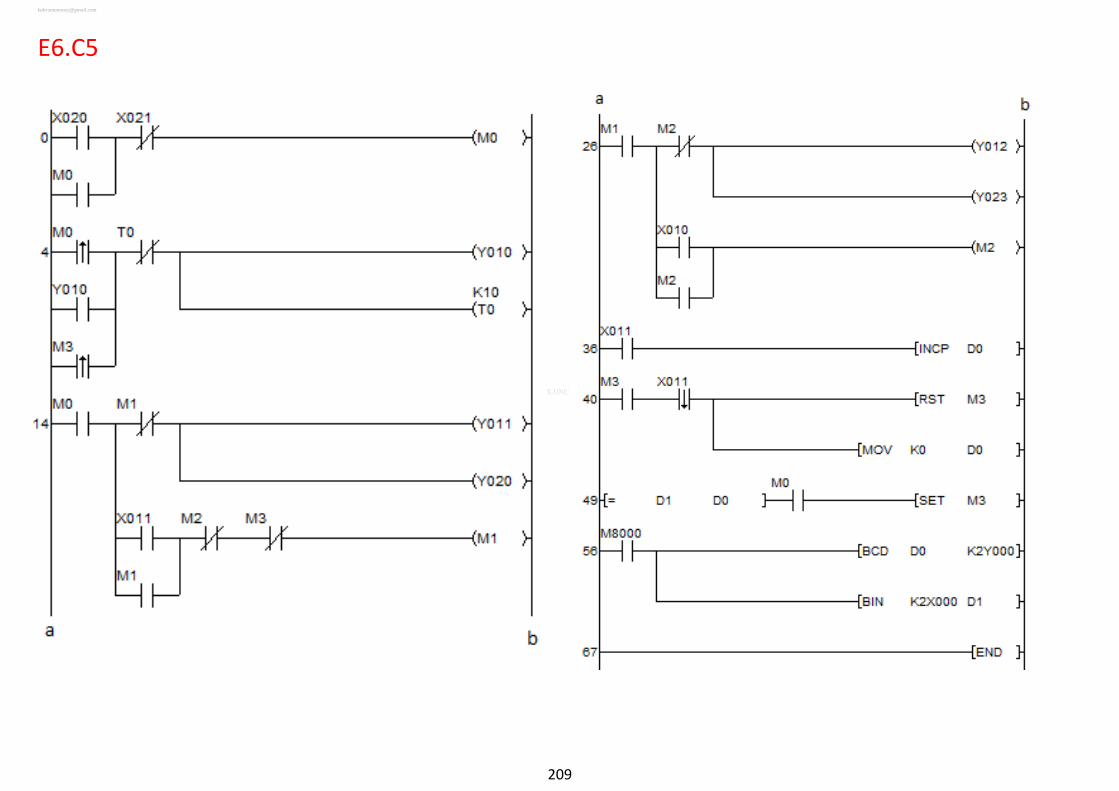
208
E6.S5
Aşağıdaki şartların hepsini gerçekleştirecek programı oluşturunuz.
1- Operasyon paneli üzerindeki X20 girişi “ON” yapıldığında, silodan yürüyen banda
sadece bir adet parça beslemesi (Y10) gerçekleşecek. Giriş tekrar aktif edilse bile
başka parça beslemesi yapılamayacak.
2- Aynı anda yürüyen bant ileri yönde (Y11) çalışacak, sağ sınır anahtarı (X11)“ON”
olduğunda yürüyen bant durup geriye doğru (Y12) çalışacak, sol sınır anahtarı (X10)
“ON” olduğunda duracak ve tekrar ileri yönde çalışacak. Bu şekildeki çalışma, X21
durdurma girişi “ON” oluncaya kadar devam edecek.
3- Parçanın ileri yönde çalışma sayısı, sürekli olarak gösterge (Y0-Y7) üzerinde
görülecek.
4- İleri yön ile birlikte kırmızı lamba(Y20) ve geri yön ile birlikte de yeşil lamba (Y23)
ışık versin.
5- İleri yöndeki çalışma sayısı, X0-X7 girişlerine bağlı olan dijital anahtar ile ayarlanan
değere ulaştığı anda, iş parçası sağ taraftan aşağıya atılsın, hemen silodan yeni bir
parça otomatik olarak bant üzerine insin, bu parça da aynı sayıda sağ yapınca aşağı
atılsın. Çalışma bu şekilde sürekli olsun. Diyagramı çizerek uygulayınız.

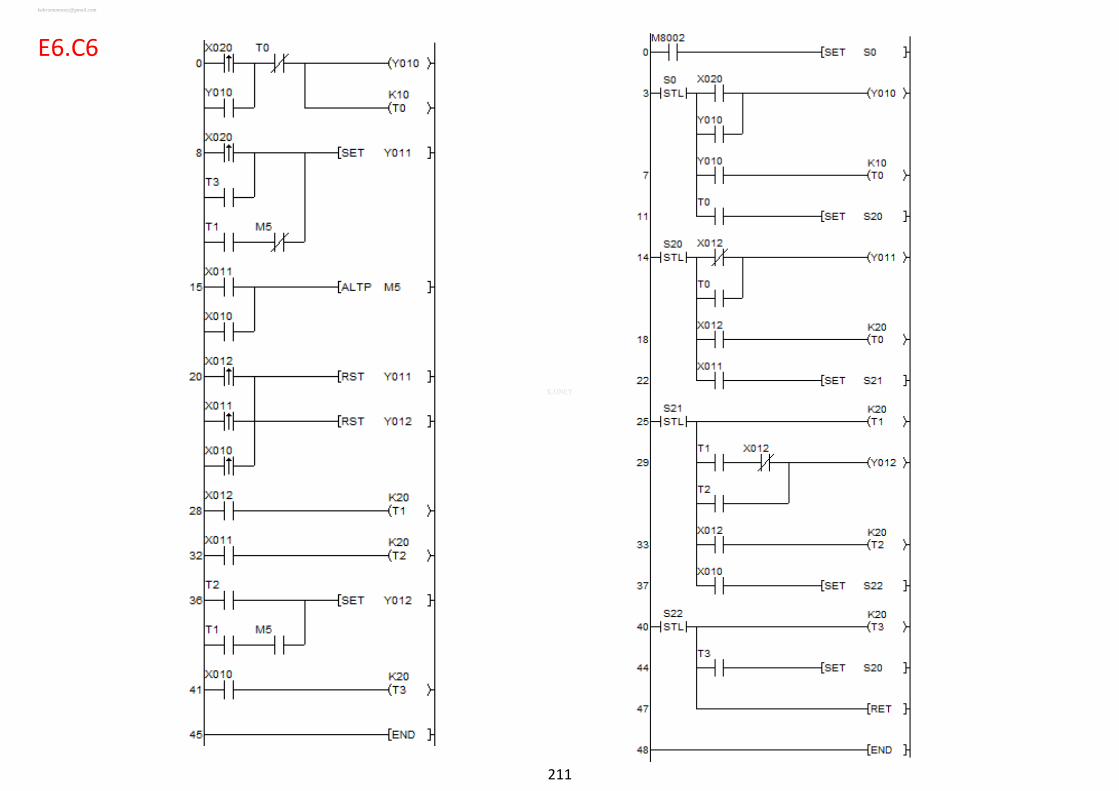
210
E6.S6
Aşağıdaki şartları gerçekleştirecek programı dizayn ediniz.
1- X20 başlatma butonuna basılınca, silodan yürüyen banda iş parçası
bırakılacak.
2- Aynı anda yürüyen bant ileri yönde hareket edecek, X12 (stop sensör) parçayı
algılayınca yürüyen bant 2 saniye süreliğine duracak ve süre sonunda yeniden
sağa hareket edecek.
3- X11 (sağ sınır anahtarı) parçayı algıladığında yürüyen bant duracak, 2 saniye
sonra geri yönde çalışacak.
4- Geri yönde giderken, parça stop sensör tarafından algılanınca yürüyen bant 2
saniyeliğine duracak, süre sonunda yeniden geri yönde çalışmaya devam
edecek.
5- Sol sınır anahtarı (X10) parçayı algıladığında yürüyen bant 2 saniyeliğine tekrar
duracak ve süre sonunda tekrar ileri yönde çalışmaya devam edecek. Sistemin
çalışması bu şekilde sürekli devam edecek. Uygulayınız.

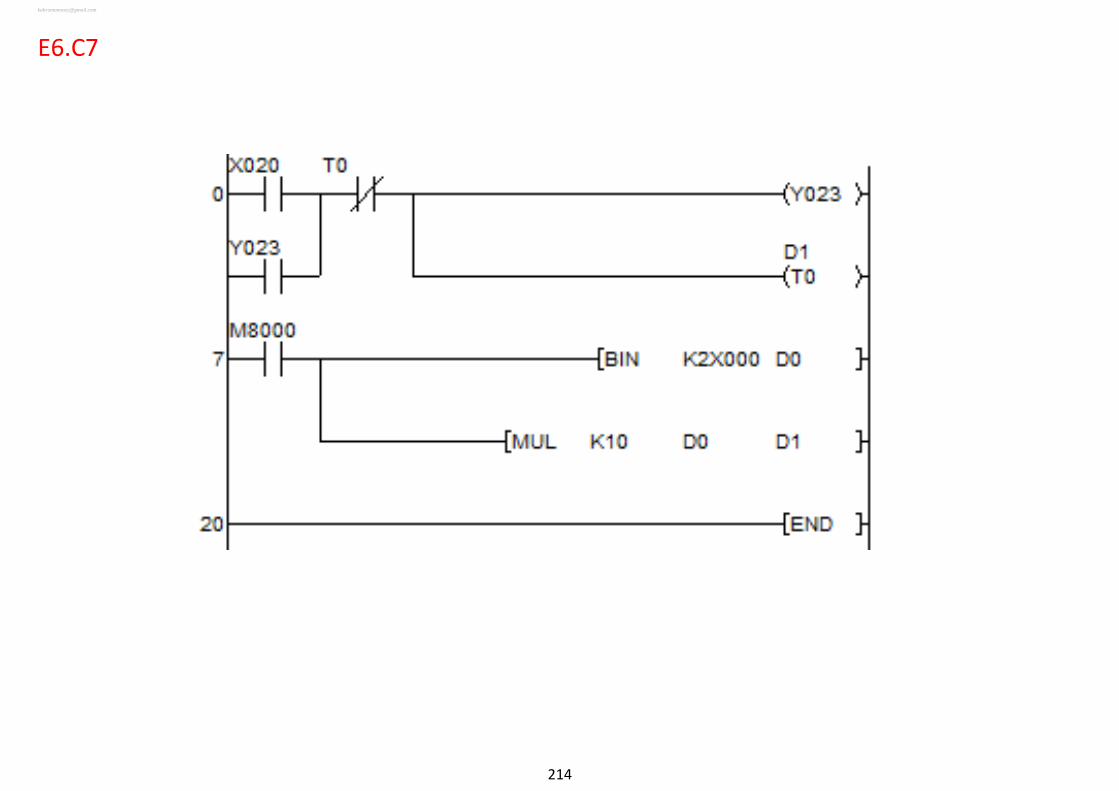
213
E6.S7
X20 başlatma butonuna basılır basılmaz yeşil
lamba (Y23) ışık versin, lambanın ışığı, dijital
anahtarda (X0 – X7) yazılan süre (saniye) kadar sonra
kendiliğinden sönsün. Uygulayınız.

215
E6.S8
X21 butonuna basılınca yeşil lamba (Y23) ışık
versin, lambanın yanma süresi, saniye olarak X20
butonuna basma süresi ile önceden ayarlansın.
(Zamanlayıcının değeri, X20 butonuna basma
süresidir) Yeşil lamba, ayarlanan sürenin sonunda
kendiliğinden sönsün. Lambanın kaç saniye ışık
vereceği, X20 öğretme butonuna basılırken
göstergeye de (Y0-Y7) aktarılsın, orada sabit kalsın.
(Yeniden bir süre öğretilinceye kadar) Uygulayınız.

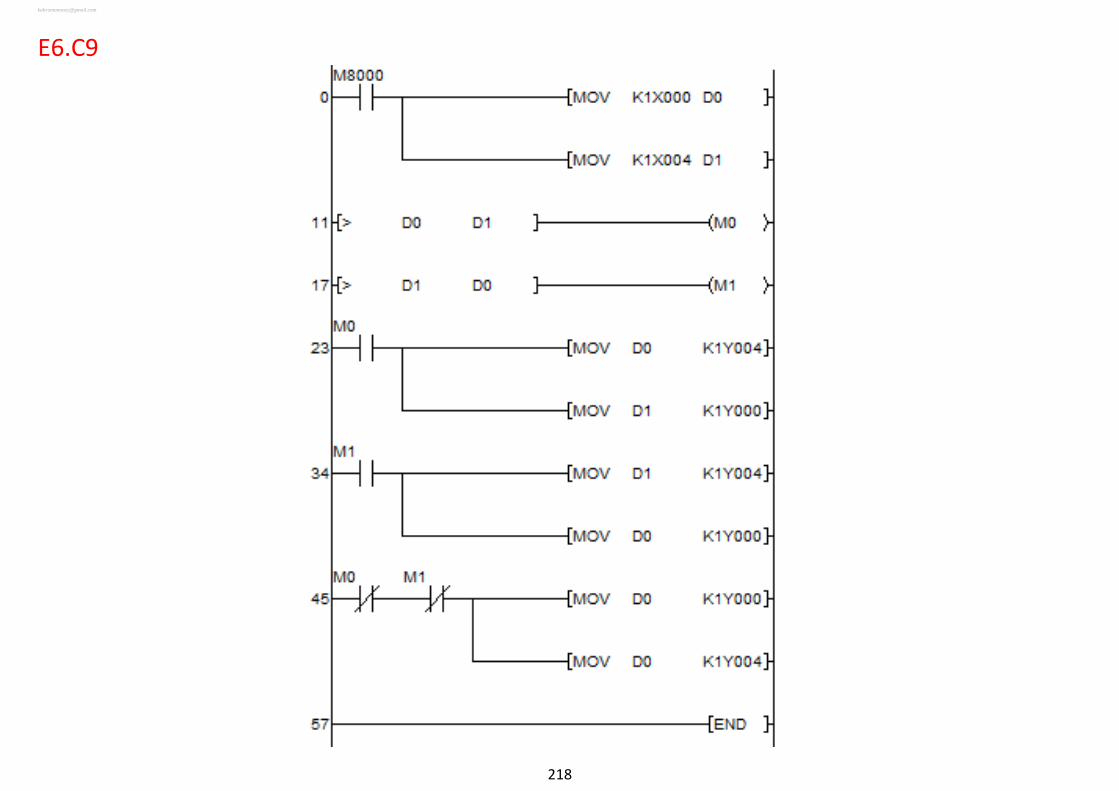
217
E6.S9
Dijital anahtardan (X0 – X7) girilen değerlerden,
büyük olan, gösterge (Y0 – Y7) üzerindeki onlar
basamağında, küçük olan ise birler basamağında
gösterilsin. Uygulayınız.
→ , → , →
35 → 53 42 → 42 77 → 77

220
E6.S10
X20 başlatma butonuna basıldığı anda, X0-X3
arasına bağlı olan dijital anahtardaki değeri, X4-X7
arasına bağlı olan dijital anahtardaki değere bölüp,
sonucun tam kısmını, Y0-Y3 arasına bağlı olan, kalan
kısmını ise Y4-Y7 arasına bağlı olan yedi elemanlı
göstergede göstermek istiyoruz. Diyagramını çizerek
uygulayınız.

222
E6.S11
X20 başlatma butonuna basıldığı anda, X0-X3
arasına bağlı olan dijital anahtardaki değeri, X4-X7
arasına bağlı olan dijital anahtardaki değere bölüp,
sonucun tam ve kalan kısımlarını 2 şer saniye
aralıklarla Y0-Y7 arasında bağlı olan 7 elemanlı
göstergede gösterecek olan programı yapınız.
Sonucun tam kısmı gösterilirken yeşil lamba (Y23),
kalan kısmı gösterilirken de kırmızı lamba (Y20) ışık
versin. Uygulayınız.

224
E6.S12
X20 Başlatma butonuna basılır basılmaz yeşil
lamba (Y23) ışık versin, 15 saniye sonra da bu
lambanın ışığı kendiliğinden sönsün. 7 elemanlı
gösterge üzerinde, 15 den geriye doğru lambanın
kalan yanma süresi her saniye birer birer azaltılarak
gösterilsin, göstergedeki değer sıfır olunca lamba da
sönsün. Diyagramını çizerek uygulayınız.

226
E6.S13
Trafik ışıkları aşağıda açıklandığı şekilde çalışsın;
PLC RUN moduna alınır alınmaz 15 saniye süre ile
kırmızı lamba (Y20) ışık versin, süre sonunda kırmızı sönüp
5 saniye süre ile sarı lamba (Y22) ışık versin, süre sonunda
bu lamba da sönüp 20 saniye süre ile yeşil lamba (Y23) ışık
versin. Süre bitiminde işlem başa dönsün. Her bir
lambanın ışık verme süresi, toplam süreden geriye doğru
her saniye birer birer düşerek 7 elemanlı gösterge
üzerinde gösterilsin. Uygulayınız.

230
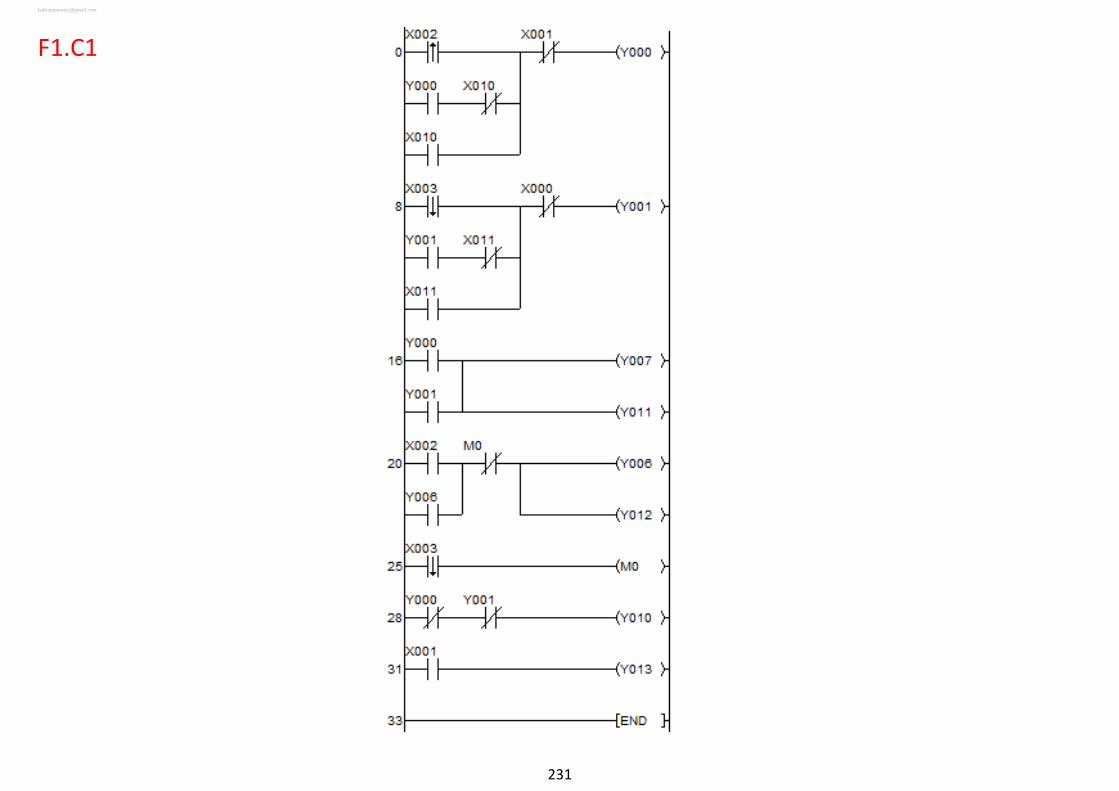
F1.S1
Aşağıdaki şartları gerçekleştirecek programı dizayn ediniz.
1- Araba kapıya yaklaşırken giriş sensörü (X2) aktif olduğu anda kapı açılacak (Y0), kapı
yukarıya tam olarak açılınca (Üst sınır anahtarı X1) kapının açılma işlemi sonlandırılacak ve
kapı yukarıda bekleyecek.
2- Araba dışarıya tamamen çıktıktan sonra (X3) kapı otomatik olarak aşağıya inecek (Y1),
tamamen aşağıya inince (Alt sınır anahtarı X0), aşağı indirme işlemi sonlandırılacak ve kapı
yeniden araba gelinceye kadar aşağıda bekleyecek.
3- Kapı aşağıya yada yukarıya hareket halinde iken, buzzer (Y7) alarm verecek.
4- Araba, giriş sensörü ile çıkış sensörü arasında olduğu sürece, ışık (Y6) çalışacak. (Işık, giriş
sensörü algılar algılamaz çalışacak, araba çıkış sensörünü tamamen terk edince sönecek.)
5- Operasyon paneli üzerindeki ışıklardan Stop (Y10), kapı hareket etmezken; Door in motion
(Y11), kapı yukarı yada aşağı yönde hareket halinde iken; Door Light, araba sensörler
arasında iken (giriş ve çıkış); Open, kapı açık iken (X1) ışık verecek.
6- Door up (X10) butonuna basılır ise kapı açılacak, Door down (X11) butonuna basılır ise
kapı kapanacak. Ladder diyagramını çizerek uygulayınız.

232
F1.S2
Yukarıdaki soruya aşağıda istenileni ekleyiniz.
Kapıyı el ile açma kapama butonları (X10, X11)
kullanılırken, kapı sonuna kadar açılmak isteniyorsa,
butona sürekli basılması gereksin. İstediğimiz
durumda kapıyı yarım açık şekilde de bırakabilelim.
Diyagramını çizerek uygulayınız.

236
F2.S1
Aşağıdaki şartları gerçekleştirecek programı dizayn ediniz.
1- Eğer perdeler kapalı ise (X0, X3) ve sahne aşağıda ise (X7),
başlatma butonuna (X16) basılır basılmaz buzzer (Y5) alarm
vermeye başlayacak, 5 saniye sonra alarmı kesilecek ve perde
açılmaya (Y0) başlayacak. Perde, her iki yönde (X2, X5) de
tamamen açılınca duracak.
2- Perdeler tamamen açıldıktan sonra, sahne yukarıya çıkacak
(Y2), tamamen yukarı çıktığı anda (X6) duracak.
3- X17 Son butonuna basıldığı anda perdeler kapanacak (Y1),
tamamen kapanınca (X0, X3) duracak. Uygulayınız.

240
F3.S1
Aşağıdaki işlemleri gerçekleştirecek programı oluşturunuz.
1- X20 butonuna basıldığı anda robot başlangıç noktasında ise (X0), parça beslemesini
(Y0) gerçekleştirecek. Parça beslemesi, robot parçayı yürüyen banda koyup yeniden
başlama noktasına gelmesi ile birlikte sonlandırılacak.
2- X24 şalteri “ON” yapıldığı anda tüm yürüyen banlar (Y1, Y2, Y3, Y4) ileri yönde
çalışmaya başlayacak, bu şalter “OFF” yapılırsa tüm yürüyen bantlar duracak.
3- Büyük, orta ve küçük parçalar, giriş sensörleri olan X1 (üst), X2 (orta) ve X3(alt)
seviye sensörleri tarafından algılanacak ve ilgili kutuya gönderilecek.
4- Eğer robotun koyduğu parça büyük ise, en sağdaki kutuya (L) gönderilecek, orta ise,
ortadaki kutuya (M) gönderilecek, küçük ise en soldaki kutuya (S) gönderilecek.
Bunun için, parçanın büyüklüğüne göre, parça ilgili kutu önüne gelince ve sensör
tarafından algılanınca (X10, X11, X12) yürüyen bantlar durdurulacak, itici (Y5, Y6,
Y7) ile parça kutu içerisine itilecek, itme işleminden sonra itici resetlenecek.
Ladder diyagramını çizerek uygulayınız.

244
F3.S2
Yukarıdaki soruya aşağıda istenilenleri ekleyiniz.
1- Robot parça beslemesini, başlangıç noktasında ve
yürüyen bantlar çalışmaya başlamış ise yapabilsin.
2- İlk besleme yapıldıktan sonra, diğer beslemeler
otomatik olarak gerçekleşsin. Besleme işlemini
otomatik olarak yaparken, parçaların boyutunu
algılayan sensör grubunu kullanın. Parça bu sensör
grubundan geçer geçmez, otomatik besleme işlemi
devreye girsin.
Ladder diyagramını çizerek uygulayınız.

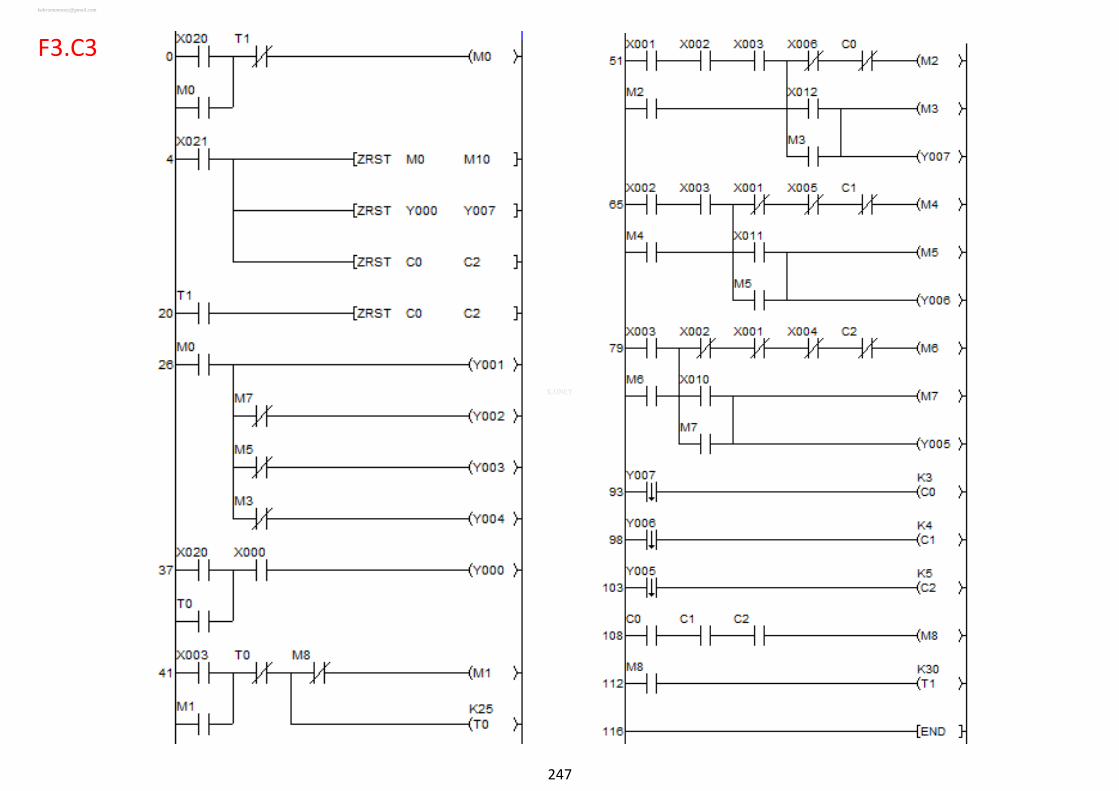
246
F3.S3
Aşağıdaki şartları gerçekleştirecek programı yapınız.
1- X20 başlatma butonuna basılır basılmaz tüm yürüyen bantlar çalışmaya başlayacak, aynı anda robot
(eğer başlangıç noktasında ise) parça beslemesi yapacak. Parça, yükseklik algılama sensöründen
geçtikten sonra, robot otomatik olarak yeni iş parçasını yürüyen banda koyacak.
2- Robot tarafından konulan iş parçası eğer büyük ise, L (Large) kutusu önüne gelince, bu kutu önündeki
yürüyen bant duracak, iş parçası bu kutuya itilecek ve parça kutuya düşünce yürüyen bant tekrar
harekete geçecek. Eğer parça orta ise M (Medium) kutusu önüne gelince, bu kutu önündeki yürüyen
bant duracak, iş parçası bu kutuya itilecek ve parça düşünce yürüyen bant tekrar hareket edecek. Eğer
parça küçük ise, S (Small) kutusu önüne gelince, bu kutu önündeki yürüyen bant duracak, parça bu
kutuya itilecek ve parça düşünce yürüyen bant tekrar harekete geçecek.
3- L kutusuna atılan parça sayısı 3, M kutusuna atılan parça sayısı 4 ve S kutusuna atılan parça sayısı 5
olduktan sonra (hangisi önde dolar ise) bu kutuya yeni parça atılmayacak, yürüyen bandın sonundan
yere düşmesi sağlanacak. Tüm kutular istenilen sayıda parça ile doldurulunca yeni parça yüklemesi
yapılmayacak, sistem duracak, yeniden başlatma butonu kullanılır ise, sistem aynı şekilde
çalışabilecek.
4- Herhangi bir anda X21 durdurma butununa basılır ise, tüm yürüyen bantlar, parça beslemesi, iticiler
duracak, yeniden başlatma butonu ile çalışabilecek.
Ladder diyagramını çizerek uygulayınız.

250
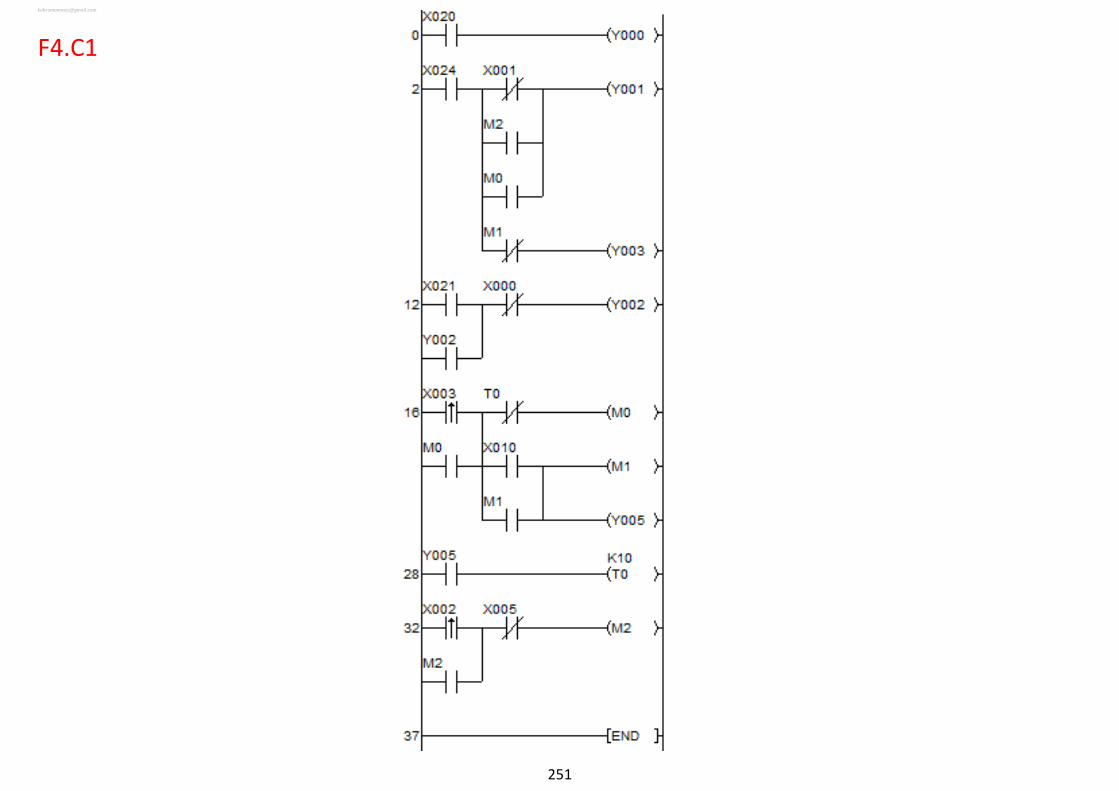
F4.S1
Sağlam ve bozuk parçaların ayrılması, Aşağıdaki şartları gerçekleştiren programı yazınız.
1- X20 başlatma butonuna basılır ise, besleme gözünden (Y0) iş parçası yürüyen bant üzerine
bırakılacak. X20 serbest bırakılır ise, besleme duracak.
2- Operasyon paneli üzerindeki X24 şalteri “ON” yapıldığı zaman yürüyen bantlar (Y1, Y3)
çalışmaya başlayacak, “OFF” yapıldığı zaman duracak.
3- Matkap içerisindeki iş parçasını algılayan sensör (X1), iş parçasını algıladığı anda yürüyen bant
(Y1) duracak.
4- X21 delme başlatma butonuna basılır ise, delme işlemi (Y2) başlayacak, delme bitti sinyali
alınınca (X0) delme işlemi sonlandırılacak.
5- Matkap delme işlemini bitirince, delme doğru yapıldı ise (X2), yanlış yapıldı ise (X3) sinyalini
otomatik olarak üretilecek. (Program tarafından yapılan işlem) (Matkap, işlemin ortasında
sonlandırılamaz, matkap, iş parçası üzerine birden çok delik delmiş ise bu parça bozuk demektir.)
6- Delinen parça bozuk ise, bozuk parça kutusu önündeki sensör (X10) tarafından algılanınca,
yürüyen bant (Y3) durdurulacak ve itici ile (Y5) bozuk parça kutusu (DEFECTİVE) içerisine
itilecek. İtme işlemi sonunda yürüyen bant tekrar hareket edecek.
7- Delinen parça sağlam ise, her iki yürüyen banttan da düz olarak geçecek ve sağlam (OK) kutusuna
atılacak.
8- İşlem sonunda istenir ise yeniden parça konulup tekrar delme işlemi yapılabilecek.
Ladder diyagramını çizerek uygulayınız.

252
F4.S2
Yukarıdaki soruya aşağıda istenilenleri ekleyiniz.
1- İş parçası, matkap altında durduğu anda, delme
işlemi otomatik olarak gerçekleşsin.
2- İlk iş parçası beslemesi X20 girişi ile yapıldıktan
sonra, diğer iş parçalarının beslemesi otomatik olarak
gerçekleşsin.
Ladder diyagramını çizerek uygulayınız.

256
F5.S1
Aşağıdaki şartları gerçekleştirecek programı yazınız.
1- Operasyon paneli üzerindeki X20 girişi “ON” yapıldığında, silodan parça beslemesi (Y0)
gerçekleşecek.
2- X24 şalteri “ON” yapılır ise, tüm yürüyen bantlar ileri yönde (Y1, Y2, Y5) çalışacak, “OFF”
yapılırsa hepsi duracak.
3- Giriş sensörleri tarafından (X0, X1, X2), silodan gelen parçanın, büyük (L), orta (M) yada
küçük (S) olduğu tespit edilecek.
a. Parça büyük ise; itici (Y3) yanındaki sensör (X3) parçayı algılayınca, yürüyen bandı (Y2)
durduracak, parçayı alt yürüyen bant üzerine itecek, bu bant da parçayı ileri yönde (Y5)
taşıyacak ve L kutusuna atacak.
b. Parça orta ise; Robot başlangıç noktasında (X4) bulunuyorsa, parça robot yanındaki
masa üzerine (X5) gelmiş ise, robot parçayı alarak (Y4) M kutusuna bırakacak, bırakma
işlemi bitince (X6) robot taşıma devresi sonlanacak.
c. Parça küçük ise; aşağı yürüyen banda atılan parça, geri yönde döndürülecek olan alt
bant (Y6) sayesinde soldaki S kutusuna atılacak.
Ladder diyagramını çizerek uygulayınız.

258
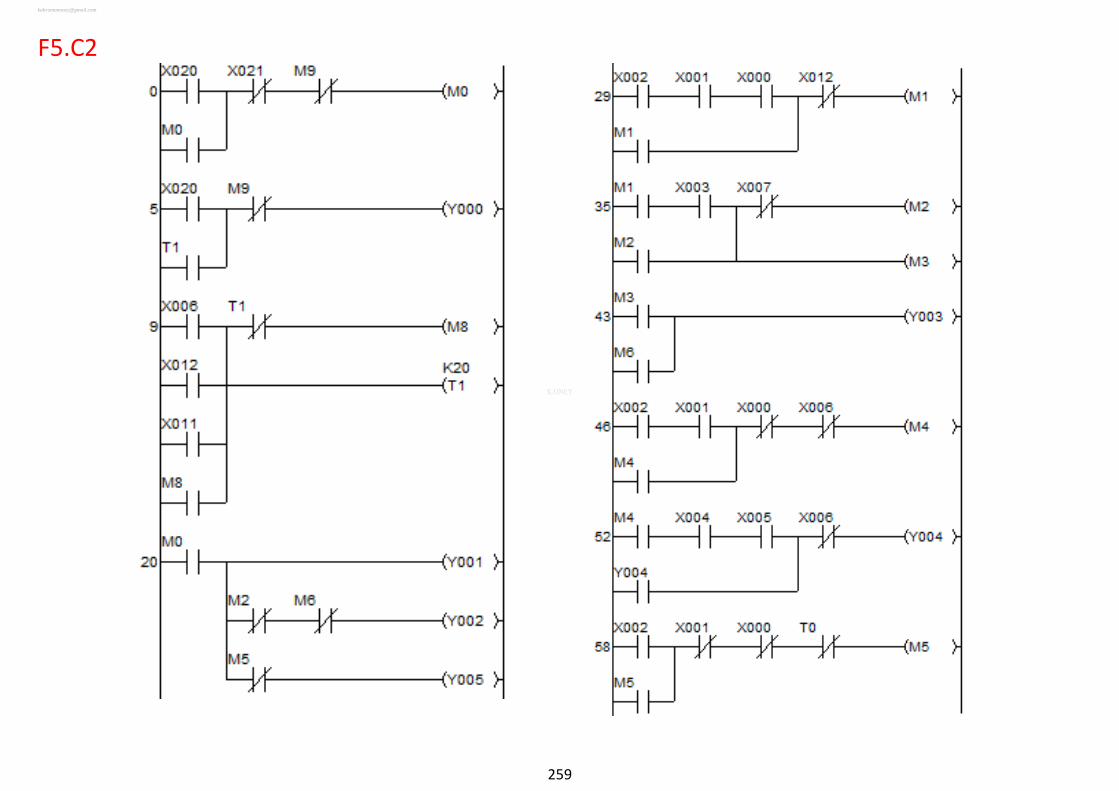
F5.S2
Aşağıdaki şartları gerçekleştirecek olan programı yazınız.
1- X20 başlatma butonuna basılır basılmaz tüm yürüyen bantlar ileri yönde çalışmaya
başlayacak, aynı zamanda besleme gözünden bir adet iş parçası yürüyen bant üzerine
bırakılacak.
2- İş parçasının büyüklüğü, sensörler tarafından algılanır algılanmaz, operatör paneli
üzerindeki PL1 – PL3 lambaları üzerinden binary olarak gösterilecek. (Her büyüklük için
ayrı ayrı gösterilecek ve gösterim, iş parçası kutu içerisine düştüğü anda silinecek)
3- İş parçası büyük ise L, orta is M, küçük ise S kutusuna atılacak.
4- İlk iş parçası kutulardan herhangi birisine düştükten sonra yeni iş parçası otomatik
olarak yüklenecek.
5- Kutulardan herhangi birisindeki iş parçası 5 olduğu anda yeni yükleme yapılmayacak ve
sistem duracak.
6- Yeniden başlatma butonu (X20) “ON” yapılacak olursa, devre yukarıda açıklanan
işlemleri tekrar edecek.
Ladder diyagramını çizerek uygulayınız.

263
F6.S1
Aşağıdaki şartları gerçekleştirecek programı yapınız.
1- X20 başlatma butonuna basıldığında, silodan bir adet iş parçası yürüyen bant üzerine
bırakılacak(Y0) , X20 serbest bırakılıp tekrar basılırsa ikinci iş parçası yüklenecek.
2- X24 şalteri “ON” yapıldığı zaman silo altında bulunan yürüyen bant (Y1) ileri yönde hareket
edecek, “OFF” yapıldığı zaman duracak.
3- Alt (S)(Y5), orta (M) (Y6) ve üst (L) (Y7) yürüyen bantlar, bandın sol kenarında bulunan
sensörlerin (X10, X12, X14) algılaması ile beraber harekete geçecek, parça sağ kenardan
(X11, X13, X15) kutuya düştükten 3 saniye sonra duracaktır. (Parça hangi banda geldi ise,
sadece o bant çalışacaktır.)
4- Gelen parçanın küçük , orta yada büyük olduğu, girişte bulunan X0, X1, X2 sensörleri ile
algılanacaktır.
5- İş parçasının asansör üzerinde olduğunu gösteren sensör X3, asansörün altta olduğunu
gösteren sensör X4, ortada olduğunu gösteren sensör X5 ve üstte olduğun gösteren sensör de
X6 dır. Asansörün yukarı kaldırılması Y2, aşağı indirilmesi Y3 ve yön çevrilmesi ise Y4
çıkışları ile yapılmaktadır.
6- Küçük iş parçaları S, orta iş parçaları M ve büyük iş parçaları da L kutusuna gönderilecek.
Ladder diyagramını çizerek uygulayınız.

266
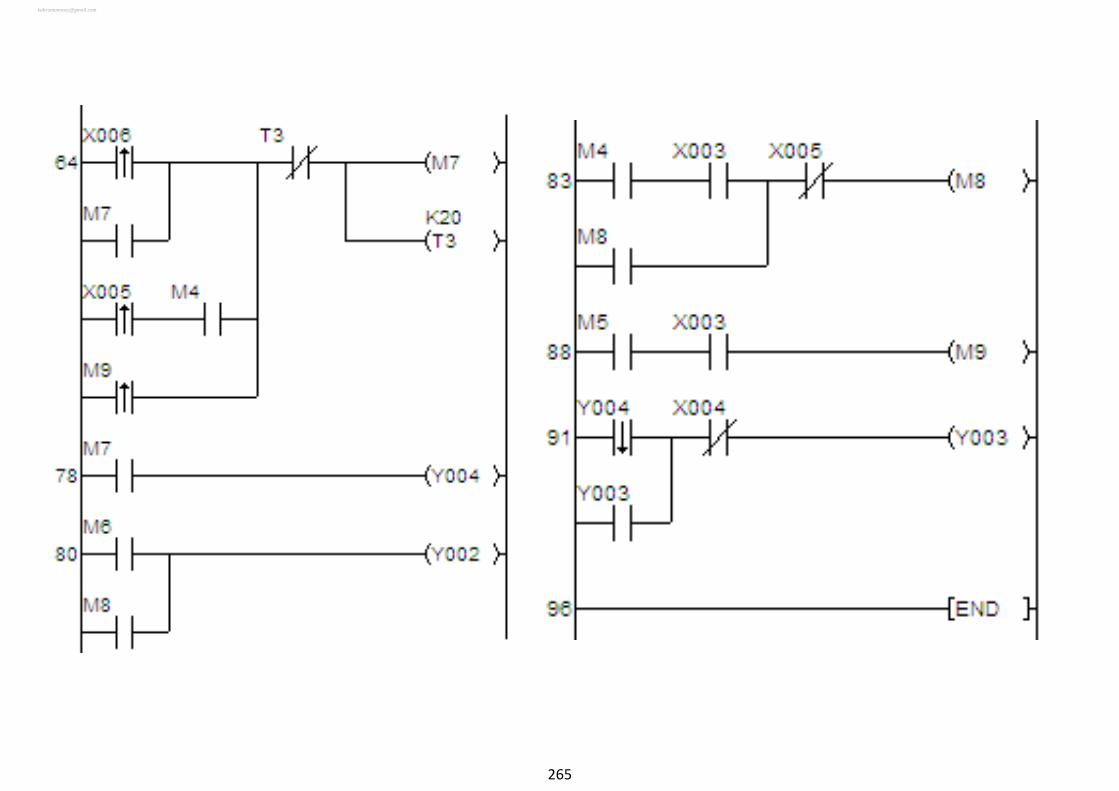
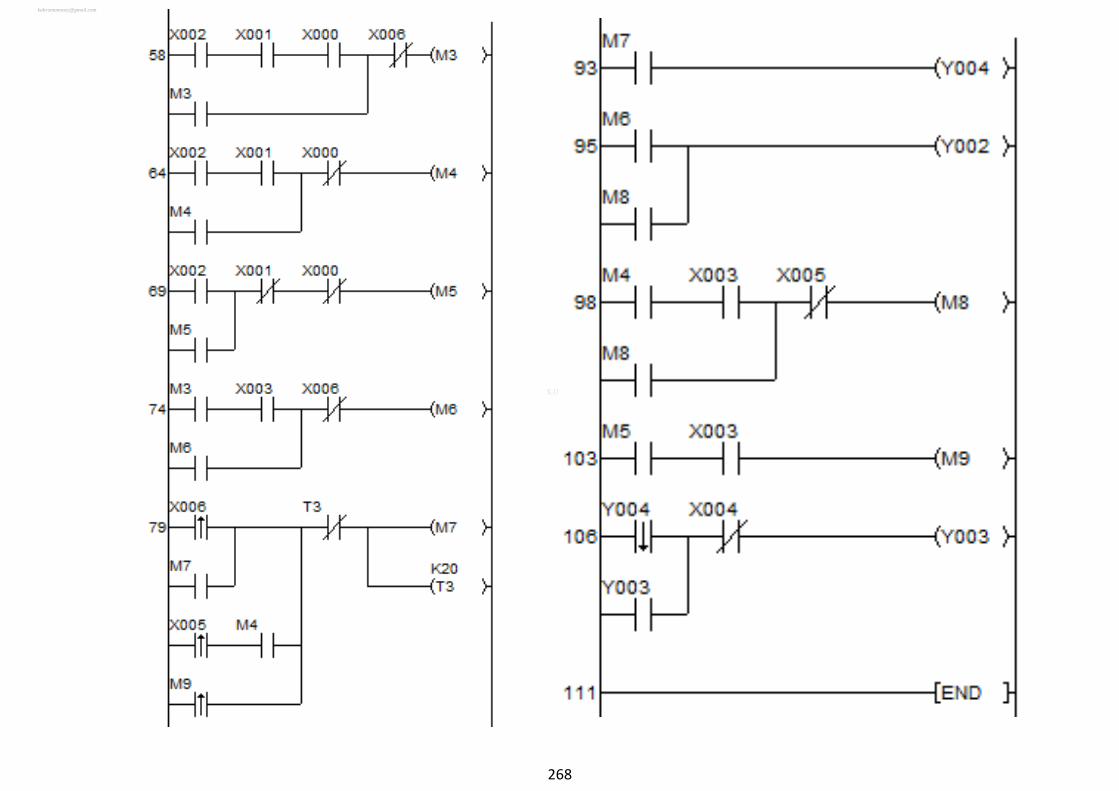
F6.S2
Aşağıdaki şartları gerçekleştirecek olan programı yazınız.
1- X20 başlatma butonuna basılır basılmaz silo altındaki yürüyen bant
çalışmaya başlayacak, otomatik olarak silodan bir adet iş parçası bu
yürüyen bandın üzerine bırakılacak.
2- Bırakılan iş parçası, küçük ise en alt, orta ise orta ve büyük ise en
üst yürüyen banda aktarılacak.
3- İş parçası bu bantlar üzerine aktarıldığı anda, bu bantlar (hangisine
aktarıldı ise sadece o bant) çalışmaya başlayacak, iş parçası sağdaki
kutuya düştükten 3 saniye sonra duracak.
4- İş parçası ilgili kutuya taşındıktan sonra yeni iş parçası otomatik
olarak silodan bırakılacak ve bu işlem sürekli olarak tekrar edecek.
Diyagramını çizerek uygulayınız.

271
F7.S1
Aşağıdaki şartları gerçekleştirecek olan programı yazınız.
1- X20 başlatma butonuna basılır ve robot başlangıç noktasında (X0) bulunuyor ise parça
beslemesi (Y0) yapılacak. Parça beslemesi süresince kırmızı ışık (Y10) çalışacak.
2- X24 şalteri “ON” yapılır ise, yürüyen bantlar (Y1, Y2, Y4, Y5) çalışmaya başlayacak.
Yürüyen bantlar çalıştığı sürece yeşil ışık (Y11) da çalışacak.
3- Robot tarafından sağlanan parçanın boyutu (Küçük, Orta, Büyük), ilk yürüyen bant üzerine
konumlandırılan üç sensör (X1, X2, X3) tarafından algılanacak. Parçanın büyüklüğüne göre
a. Eğer parça büyük ise; arka yürüyen banda gönderilecek ve sağ kenardan aşağıya
düşmesi sağlanacak.
b. Eğer parça orta ise; ön yürüyen banda alınarak (sıralama kolu çalıştırılarak) (Y3) robot
tarafından kutuya konulması sağlanacak.
c. Eğer parça küçük ise; arka banda gönderilecek, X6 sensörü parçayı algıladığında
yürüyen bant (Y5) durdurulacak ve itici (Y6) tarafından parça itilerek kutu içerisine
atılacak. Kutu atılınca yürüyen bant tekrar çalışacak. Yürüyen bant durduğu sürece sarı
lamba (Y12) ışık verecek.
4- X25 şalteri “ON” konumuna getirilir ise, ilk besleme işleminden sonraki beslemeler otomatik
olarak yapılacak. Diyagramını çizerek uygulayınız.