Embed Size (px)
Citation preview
General Nonlinear Programming (NLP) Software
CAS 737 / CES 735
Kristin DaviesHamid Ghaffari
Alberto Olvera-Salazar Voicu Chis
January 12, 2006

Outline Intro to NLP Examination of:
IPOPT PENNON CONOPT LOQO KNITRO
Comparison of Computational Results Conclusions

Intro to NLP
The general problem:
.
,,,
,...,1,0)(
,...,1,0)(..
)(min
Condefinedfunctionsare
ghfandsetcertainaisCxwhere
Cx
mJjxg
pIixhts
xf
jinn
j
i
Either the objective function or some of the constraints may be nonlinear
(NLP)
Intro to NLP (cont’d…) Recall:
The feasible region of any LP is a convex set
if the LP has an optimal solution, there is an extreme point of the feasible set that is optimal
However: even if the feasible region of an NLP is
a convex set, the optimal solution might not be an extreme point of the feasible region

Intro to NLP (cont’d…) Some Major approaches for NLP
Interior Point Methods Use a log-barrier function
Penalty and Augmented Lagrange Methods Use the idea of penalty to transform a constrained
problem into a sequence of unconstrained problems.
Generalized reduced gradient (GRG) Use a basic Descent algorithm.
Successive quadratic programming (SQP) Solves a quadratic approximation at every iteration.
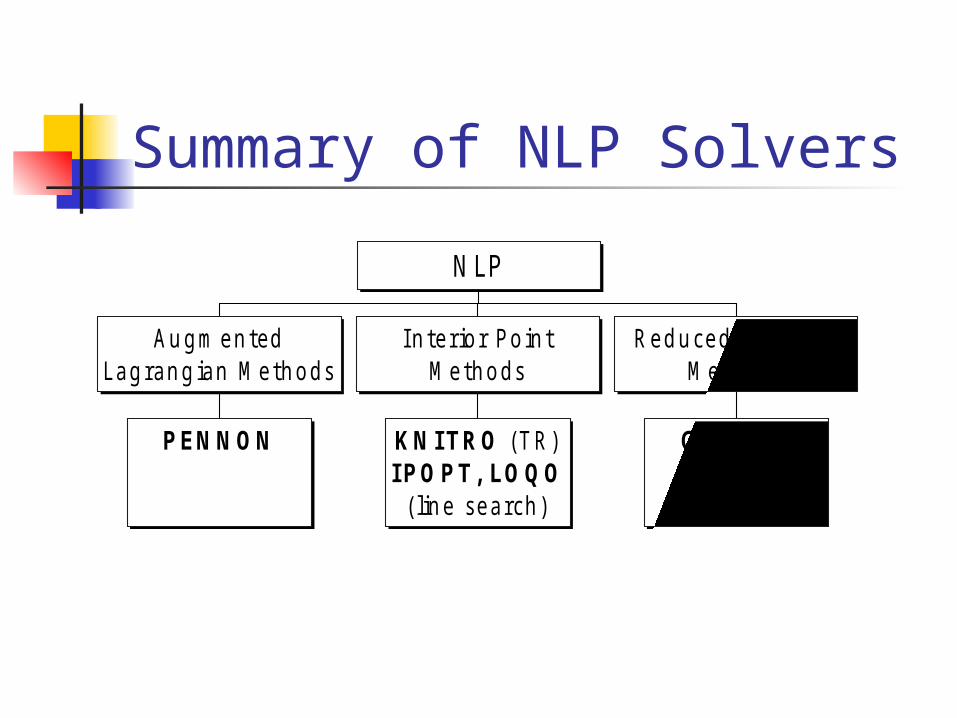
Summary of NLP Solvers
PEN N ON
A u gm en tedLag ran g ian M eth ods
KN I TR O ( T R )I PO PT, LO QO
( lin e search)
I n terio r P o in tM eth ods
CO N O PT
R ed u ced G rad ientM eth ods
NLP
IPOPT SOLVER (Interior Point OPTimizer)
Creators Andreas Wachter and L.T. Biegler at CMU
(~2002)
Aims Solver for Large-Scale Nonlinear
Optimization problems Applications
General Nonlinear optimization Process Engineering, DAE/PDE Systems, Process
Design and Operations, Nonlinear Model Predictive control, Design Under Uncertainty
IPOPT SOLVER (Interior Point OPTimizer)
Input Format Can be linked to Fortran and C code MATLAB
and AMPL. Language / OS
Fortran 77, C++ (Recent Version IPOPT 3.x) Linux/UNIX platforms and Windows
Commercial/Free Released as open source code under the
Common Public License (CPL). It is available from the COIN-OR repository

IPOPT SOLVER (Interior Point OPTimizer)
Key Claims Global Convergence by using a Line
Search. Find a KKT point Point that Minimizes Infeasibility (locally)
Exploits Exact Second Derivatives AMPL (automatic differentiation) If not Available use QN approx (BFGS) Sparsity of the KKT matrix.
IPOPT has a version to solve problems with MPEC Constraints. (IPOPT-C)
IPOPT SOLVER (Interior Point OPTimizer)
Algorithm Interior Point method with a novel line
search filter. Optimization Problem
0
0)(..
)(min
x
xcts
xfnx
0)(..
)log()()(min )(
xcts
xxfxi
il
xln
The bounds are replaced by a logarithmic Barrier term. The method solves a sequence of barrier problems for decreasing values of l

IPOPT SOLVER (Interior Point OPTimizer)
Algorithm (For a fixed value of )
Solve the Barrier Problem Search Direction (Primal-Dual IP)
Use a Newton method to solve the primal dual equations.
Hessian Approximation (BFGS update) Line Search (Filter Method) Feasibility Restoration Phase
l
IPOPT SOLVER (Interior Point OPTimizer)
Optimization Problem
0
0)(..
)(min
x
xcts
xfnx
0)(..
)log()()(min )(
xcts
xxfxi
il
xln
l
Outer LoopOuter Loop
The bounds are replaced by a logarithmic Barrier term.
The method solves a sequence of barrier problems for decreasing values of

IPOPT SOLVER (Interior Point OPTimizer)
Algorithm (For a fixed value of ) Solve the Barrier Problem
Search Direction (Primal-Dual IP) Use a Newton method to solve the
primal dual equations Hessian Approximation (BFGS update)
l

IPOPT SOLVER (Interior Point OPTimizer)
InnerLoopInnerLoop
0)(
0
0)()(
xc
eXVe
vxcxf
Optimality conditionsOptimality conditions
eXv
VariablesDual1
0)(..
)log()()(min )(
xcts
xxfxi
il
xln
Barrier Barrier NLPNLP
eeVX
xc
vxcxf
d
d
d
VX
xc
IxcH
kk
k
kkT
kk
vk
k
xk
kk
Tk
kk
)(
)()(
0
00)(
)(
),(2kkxxk xLH
At a Newton's iteration At a Newton's iteration ((xxkk,,kk,v,vkk))
)(
)()(
)(
)(
k
kkT
kk
k
xk
cT
k
kHkk
xc
vxcx
d
d
Ixc
xcIH
At a Newton's iteration At a Newton's iteration ((xxkk,,kk,v,vkk))
Algorithm Core: Solution of this Linear systemAlgorithm Core: Solution of this Linear system

IPOPT SOLVER (Interior Point OPTimizer)
Algorithm (For a fixed value of ) Line Search (Filter Method)
A trial point is accepted if improves feasibility or if improves the barrier function
Assumes Newton directions are “Good” especially when using Exact 2nd Derivatives
l
vkkkk
xkkkk
dvv
dxx
1
1
kkk
kkk
xx
or
xcxc
)(
)(If
IPOPT SOLVER (Interior Point OPTimizer)
Line Search - Feasibility Restoration Phase
When a new trial point does not provides sufficient improvement.
0..
)(min2
2
xts
xcnx
Restore FeasibilityMinimize constraint
violation
0
0)(..
min2
2
x
xcts
xx kx n
Force Unique SolutionFind closest feasible point.
Add Penalty function

The complexity of the problem increases when complementarity conditions are introduced from:
miyw
ywx
ywxc
st
ywxf
ii
ywx mmn
1,0
0,,
0),,(
.
),,(min
)()(
,,
miyw
ywxc
st
ywx
ywxf
ii
m
i
im
i
in
i
i
ywx mmn
1,0
0),,(
.
lnlnln
),,(min
)()(
1
)(
1
)(
1
)(
,,
)()( ii yw
•The interior Point method for NLPs has been extended to handle complementarity problems. (Raghunathan et al. 2003).
0)()( ii yw is relaxed as 0)(
)()()(
i
iii
s
syw
IPOPT SOLVER (Interior Point OPTimizer)

IPOPT SOLVER (Interior Point OPTimizer)
Additional IPOPT 3x. Is now programmed in C++. Is the primary NLP Solver in an undergoing
project for MINLP with IBM. References
Ipopt homepage:http://www.coin-or.org/Ipopt/ipopt-fortran.html
A. Wächter and L. T. Biegler, On the Implementation of a Primal-Dual Interior Point Filter Line Search Algorithm for Large-Scale Nonlinear Programming, Research Report, IBM T. J. Watson Research Center, Yorktown, USA, (March 2004 - accepted for publication in Mathematical Programming)

PENNON (PENalty method for NONlinear & semidefinite programming)
Creators Michal Kocvara & Michael Stingl (~2001)
Aims NLP, Semidefinite Programming (SDP),
Linear & Bilinear Matrix Inequalities (LMI & BMI), Second Order Conic Programming (SOCP)
Applications General purpose nonlinear optimization,
systems of equations, control theory, economics & finance, structural optimization, engineering

SDP (SemiDefinite Programming)
Minimization of a linear function subject to the constraint that an affine combination of symmetric matrices is positive semidefinite
m
iii
T
FxFxFwhere
xFts
xc
10)(
0)(..
min
),...,(matricessymmetric1 0 mFFm
Linear Matrix Inequality (LMI)
defines a convex constraint on x

SDP (SemiDefinite Programming)
-always an optimal point on the boundary
-boundary consists of piecewise algebraic surfaces

SOCP (Second-Order Conic Programming)
Minimization of a linear function subject to a second-order cone constraint
iTiii
T
dxcbxAts
xc
..
min
tuRtRu
t
uC k
k ,,1
Called a second-order cone constraint since the unit second-order cone of dimension k is defined as:
Which is called thequadratic, ice-cream,or Lorentz cone

PENNON (PENalty method for NONlinear & semidefinite programming)
Input Format MATLAB function, routine called from C
or Fortran, stand-alone program with AMPL
Language Fortran 77
Commercial/Free Variety of licenses ranging from
Academic – single user ($460 CDN) to Commercial – company ($40,500 CDN)

PENNON (PENalty method for NONlinear & semidefinite programming)
Key Claims 1st available code for combo NLP, LMI, &
BMI constraints Aimed at (very) large-scale problems Efficient treatment of different sparsity
patterns in problem data Robust with respect to feasibility of
initial guess Particularly efficient for large convex
problems

PENNON (PENalty method for NONlinear & semidefinite programming)
Algorithm Generalized version of the Augmented
Langrangian method (originally by Ben-Tal & Zibulevsky)
0/)(..
)(min
iigi pxgpts
xf
Augmented Problem
Augmented Lagrangian
gm
iiigii pxgpuxfpuxF
1
/)()(),,(
multiplierLagrange
functionpenalty
parameterpenalty0
sconstraintinequalityof#
,...,1
i
g
i
g
g
u
p
m
mi

PENNON (PENalty method for NONlinear & semidefinite programming)
The Algorithm Consider only inequality constraints from
(NLP)
Based on choice of a penalty function, φg, that penalizes the inequality constraints
Penalty function must satisfy multiple properties such that the original (NLP) has the same solution as the following “augmented” problem:
0
,...1,0/)(..
,)(min
i
giigi
pwith
mipxgpts
xxf
(NLPφ)
[3] Kocvara & Stingl

PENNON (PENalty method for NONlinear & semidefinite programming)
The Algorithm (Cont’d…) The Lagrangian of (NLPφ) can be viewed as a
(generalized) augmented Lagrangian of (NLP):
gm
iiigii pxgpuxfpuxF
1
/)()(),,(
Lagrange multiplier
Penalty parameter Penalty
function
Inequality constraint
[3] Kocvara & Stingl

PENNON (PENalty method for NONlinear & semidefinite programming)
The Algorithm STEPS
.,...,1,0.)0( 111gii mipLetgivenbeuandxLet
[3] Kocvara & Stingl
.
,...2,1
satisfiedis
criteriumstoppingauntilrepeatkFor
gki
ki
gki
kig
ki
ki
kkkx
k
mippiii
mipxguuii
KpuxFthatsuchxFindi
,...,1,)(
,...,1,/)(
,,)(
1
1'1
11

PENNON (PENalty method for NONlinear & semidefinite programming)
The Algorithm STEPS
.,...,1,0.)0( 111gii mipLetgivenbeuandxLet
Initialization Can start with an arbitrary primal variable ,
therefore, choose Calculate initial multiplier values Initial p= , typically between 10 - 10000
1iu
01 xx
[3] Kocvara & Stingl
0

PENNON (PENalty method for NONlinear & semidefinite programming)
The Algorithm STEPS
KpuxFthatsuchxFindi kkkx
k ,,)( 11
(Approximate) Unconstrained Minimization Performed either by Newton with Line Search, or
by Trust Region Stopping criteria:
[3] Kocvara & Stingl
11,,,,
/,,
1.0,,
1
2
1'
2
1
2
1
H
kkkxH
kkkx
ki
kig
ki
ki
kkkx
kkkx
puxFpuxF
orpxguupuxF
orpuxF
1)'(' ),,(minarg1 kk
x
k puxFx

PENNON (PENalty method for NONlinear & semidefinite programming)
The Algorithm STEPS
5.0,1 typically
gki
kig
ki
ki mipxguuii ,...,1,/)( 1'1
Update of Multipliers Restricted in order to satisfy:
with a positive
If left-side violated, let If right side violate, let
11
ki
ki
u
u
[3] Kocvara & Stingl
newiu
/1newiu

PENNON (PENalty method for NONlinear & semidefinite programming)
The Algorithm STEPS
gki
ki mippiii ,...,1,)( 1
Update of Penalty Parameter No update during first 3 iterations Afterwards, updated by a constant
factor dependent on initial penalty parameter
Penalty update is stopped if peps (10-6) is reached [3] Kocvara & Stingl

PENNON (PENalty method for NONlinear & semidefinite programming)
The Algorithm
Choice of Penalty Function Most efficient penalty function for
convex NLP is the quadratic-logarithmic function:
[4] Ben-Tal & Zibulevsky
holdpropertiesthatsocrtcctc
andrwherertctctct
i
g
6,...,1)log(
)1,1()(
654
322
21
1

PENNON (PENalty method for NONlinear & semidefinite programming)
The Algorithm
Overall Stopping Criteria
[3] Kocvara & Stingl
7
1
10
)(1
)()(
)(1
),,()(
where
xf
xfxfor
xf
puxFxfk
kk
k
kkk

PENNON (PENalty method for NONlinear & semidefinite programming)
Assumptions / Warnings More tuning for nonconvex problems is
still required Slower at solving linear SDP problems
since algorithm is generalized

PENNON (PENalty method for NONlinear & semidefinite programming)
References Kocvara, Michal & Michael Stingl. PENNON: A Code for
Convex and Semidefinite Programming. Optimization Methods and Software, 8(3):317-333, 2003.
Kocvara, Michal & Michael Stingl. PENNON-AMPL User’s Guide. www.penopt.com . August 2003.
Ben-Tal, Aharon & Michael Zibulevsky. Penalty/Barrier Multiplier Methods for Convex Programming Problems. Siam J. Optim., 7(2):347-366, 1997.
Pennon Homepage. www.penopt.com/pennon.html Available online January 2007.





























