Embed Size (px)
Citation preview

European Journal of Operational Research 236 (2014) 113–125
Contents lists available at ScienceDirect
European Journal of Operational Research
journal homepage: www.elsevier .com/locate /e jor
Discrete Optimization
Genetic-algorithm-based simulation optimization considering a singlestochastic constraint
0377-2217/$ - see front matter � 2013 Elsevier B.V. All rights reserved.http://dx.doi.org/10.1016/j.ejor.2013.11.034
⇑ Corresponding author. Tel.: +886 6252525 53135.E-mail address: [email protected] (S.C. Tsai).
Shing Chih Tsai ⇑, Sheng Yang FuNational Cheng Kung University, No. 1, University Road, Tainan City, Taiwan
a r t i c l e i n f o
Article history:Received 22 October 2012Accepted 24 November 2013Available online 4 December 2013
Keywords:MetaheuristicsGenetic algorithmSimulationSimulation-based optimizationFeasibility determination
a b s t r a c t
In this paper, we consider the discrete optimization via simulation problem with a single stochastic con-straint. We present two genetic-algorithm-based algorithms that adopt different sampling rules andsearching mechanisms, and thus deliver different statistical guarantees. The first algorithm offers globalconvergence as the simulation effort goes to infinity. However, the algorithm’s finite-time efficiency maybe sacrificed to maintain this theoretically appealing property. We therefore propose the second heuristicalgorithm that can take advantage of the desirable mechanics of genetic algorithm, and might be betterable to find near-optimal solutions in a reasonable amount of time. Empirical studies are performed tocompare the efficiency of the proposed algorithms with other existing ones.
� 2013 Elsevier B.V. All rights reserved.
1. Introduction
Optimization via simulation (OvS) is the process of optimizingthe expected performance of a discrete event, stochastic systemthrough computer simulation (e.g., Abo-Hamad & Arisha, 2013;Arreola-Risa, Giménez-García, & Martínez-Parra, 2011; Chen,2011; Hong & Nelson, 2009; Tsai, 2013; Tsai & Chu, 2012; Yu, Tsai,& Huang, 2010). Hong and Nelson (2009) classified OvS problemsinto three categories based on the feasible region structure: contin-uous OvS, discrete OvS (DOvS), and ranking and selection (R&S).For the R&S problems, the number of alternatives in the feasible re-gion is so small (often less than 500) that we may simulate all solu-tions and choose the best (or near the best) among them with aspecified confidence level (see Kim & Nelson (2006) for a survey).For DOvS problems, we have a very large number of feasible solu-tions (discrete design variables), and the existing algorithms oftenemphasize a global convergence to the optimal solution asymptot-ically. In practice, decision makers usually need to consider multi-ple performance measures rather than a single one due to physicalor managerial requirements. For instance, in a typical flow-lineproblem, the decision maker is interested in finding a buffer alloca-tion setting to maximize the expected throughput over a fixedplanning horizon, while also keeping the expected overall work-in-process no greater than a certain level. Recently, more researchinterest in the OvS literature has been directed to solving problemswith stochastic constraints or multiple performance measures.
Morrice and Butler (2006) developed a R&S procedure based onmulti-attribute utility theory to allow tradeoffs between conflict-ing targets. Kabirian and Ólafsson (2009) proposed a heuristic iter-ative algorithm for finding the best solution in the presence ofmultiple stochastic constraints. Kleijnen, van Beers, and vanNieuwenhuyse (2010) combined methodologies from metamodelingand mathematical programming for solving constrained optimiza-tion of random simulation models. Bhatnagar, Hemachandra, andMishra (2011) and Szechtman and Yücesan (2008) proposed sto-chastic approximation algorithms for constrained optimizationvia simulation. Luo and Lim (2011) proposed a new approach thatconverts a constrained optimization problem into an uncon-strained one by using the Lagrangian function. Similarly, Parkand Kim (2011) presented a method called penalty function withmemory, which is added to the objective function and then re-places a DOvS problem with stochastic constraints into a series ofnew unconstrained problems. Vieira Junior, Kienitz, and Belderrain(2011) proposed a novel simulation allocation rule to be used in alocally convergent random search algorithm, called COMPASS(Hong & Nelson, 2006), to handle stochastic constrained problems.Hunter and Pasupathy (2013) and Pujowidianto, Hunter, Pasupathy,Lee, and Chen (2012) applied a large-deviations approach toprovide an asymptotically optimal sample allocation that maxi-mizes the rate at which the probability of false selection tends tozero. These methods have a requirement that all the solutions besimulated at least once, so they are more appropriate to the settingwhere the solution space is finite and contains a small number ofelements. Andradóttir and Kim (2010) presented one type of R&Sprocedure (called the Feasibility Determination Procedure, orFDP) that checks the feasibility of each solution among a finite

114 S.C. Tsai, S.Y. Fu / European Journal of Operational Research 236 (2014) 113–125
set with respect to a stochastic constraint. Instead of giving a guar-antee of correctly choosing the best solution, Bayesian proceduresmaximize the posterior probability of correct selection within a gi-ven simulation budget. There are some works which developedefficient Bayesian procedures to address the constrained optimiza-tion problem (e.g., Guan, Song, Ho, & Zhao, 2006; Jia, 2009; Lee,Pujowidianto, Li, Chen, & Yap, 2012; Li, Lee, & Ho, 2002). It shouldbe noted that the existing algorithms handling stochastic con-straints are more appropriate to be used when the number of solu-tion designs is not too large. This implies that they will becomeinefficient (i.e., require excessive sampling cost) when applied toa very large solution space.
Most commercial OvS solvers use optimization metaheuristics,such as tabu search, neural nets, and genetic algorithms (GAs), thathave generally been designed and proven to be effective on diffi-cult and deterministic optimization problems. While these algo-rithms often find promising solutions quickly, they may alsobecome pure random search methods if the stochastic variationof output (i.e., simulation noise) is high or the number of obtainedsamples for each solution is set too low. That is, their implementa-tions do not always adequately account for the presence of statis-tical errors. In addition, these algorithms do not provide anystatistical guarantee regarding the quality or goodness of the finalselected solution. To handle the aforementioned issues, Boesel,Nelson, and Kim (2003) proposed an adaptive genetic-algorithm-based procedure to account for simulation noise in the stochasticoptimization context. Their procedure also guarantees to returnthe best solution over the solutions visited by a heuristic searchprocedure. Subsequently, Xu, Nelson, and Hong (2010) used theniching GA together with COMPASS (Hong & Nelson, 2006) toestablish local optimality with statistical confidence whensimulating only a small portion of the feasible solutions. Nazzal,Mollaghasemi, Hedlund, and Bozorgi (2012) proposed a simulationoptimization methodology that combines the GA and a R&S proce-dure under common random number (CRN). They developed a newR&S procedure to select a nonempty subset so that the best solu-tion is contained in the subset with a pre-specified probability. Fit-ness values and selective probabilities are then computed based onthe estimated performances which are obtained from the afore-mentioned R&S procedure. Notice that these genetic-algorithm-based procedures are adapted for solving the DOvS problem, butcan only optimize the expected value of a single performance mea-sure (see Ólafsson (2006) for a review of metaheuristics for OvS).To handle the multi-objective simulation optimization problem,Lee, Chew, Teng, and Chen (2008) developed a solution frameworkwhich integrates evolutionary algorithm with multi-objectivecomputing budget allocation method (MOCBA). They employedMOCBA to efficiently allocate simulation replications to solutionsin the current population. The proposed approach is applied on amulti-objective aircraft spare parts allocation problem to find aset of non-dominated solutions. Horng, Lin, Lee, and Chen (2013)used GA in combination with a surrogate model to find a set ofgood solutions in the global search stage. In the second stage theyemployed a probabilistic local search method to identify theapproximate local optima. In the final stage OCBA is used to obtainthe best solution among the promising ones identified previously.
In this paper, we propose two efficient algorithms (based onGA) that are both theoretically robust and of practical value forsolving the DOvS problem with a single stochastic constraint. Inboth proposed algorithms we use GA to guide the search process,because it is a population-based algorithm that simultaneouslyconsiders multiple candidate solutions and is shown to be more ro-bust to stochastic noise (Xu et al., 2010). GA works with a popula-tion of potential solutions and moves this population toward theoptimum iteratively. The terms iteration and generation are usedinterchangeably in this work to refer to the process of transforming
one population of solutions to another. The proposed GA is adaptedto handle two performance measures with stochastic noise (i.e., astochastic objective and constraint) in a simulation environment.Two types of R&S procedure are incorporated into our DOvS algo-rithms to enhance its statistical efficiency and validity. We use FDP(see Andradóttir & Kim (2010)) repeatedly in the proposed GA toensure that the candidate solutions in a population are feasiblewith respect to the stochastic constraint (with some confidence).See Appendix A.1 for the statistical guarantee provided by FDP.At the end of the algorithms we also invoke the clean-up procedureproposed in Boesel, Nelson, and Ishii (2003) to select the best withrespect to the stochastic objective from a set of potential solutions.See Appendix A.2 for a detailed description of this clean-up proce-dure. The first proposed DOvS algorithm guarantees global conver-gence as the simulation effort goes to infinity (under the conditionthat the picked solution is feasible), and also guarantees to choosethe best among all evaluated possibly feasible solutions with aspecified confidence level. Of course it is somewhat reassuring tohave convergence statements, in the sense that the algorithms willeventually reach the global optimal when given large enough sim-ulation effort. However, the algorithm’s finite-time efficiency maybe sacrificed to maintain this theoretically appealing property. Fur-ther, this algorithm has to visit every solution infinitely often toguarantee convergence, which is not very practically meaningfulespecially when the sampling budget is limited. We therefore pro-pose the second DOvS algorithm, which is more heuristic-orientedand can take advantage of the desirable inherent properties of GA(e.g., the adaptive constraint-handling techniques and the mecha-nism of elite population, see Coello (2002)). The second algorithmis designed to identify the best solution among the final elite pop-ulation, and may deliver competitive performance in a reasonablecomputation time.
The paper is organized as follows. In Section 2 we define theDOvS problem with a single stochastic constraint, and introducethe relevant notations and assumptions. Sections 3 and 4 presenttwo DOvS algorithms that adopt different sampling rules andsearching mechanisms, and thus provide different statisticalguarantees. We give a high-level review of the existing techniqueswe incorporate, and a detailed description of only the mostcritical enhancements. An empirical evaluation to comparedifferent algorithms is provided in Section 5, while the paperends with some concluding remarks in Section 6. The conver-gence proof and some details of our algorithms are contained inAppendix A.
2. Framework
Our goal is to select the solution with the largest or smallest ex-pected performance (in terms of the stochastic objective) among alarge number of candidate solutions that satisfy a single stochasticconstraint. Let GjðxiÞ denote the jth simulation observation takenfrom solution xi (associated with the objective performance mea-sure), and let HjðxiÞ be the jth simulation observation taken fromsolution xi (associated with the stochastic constraint). The ith solu-tion xi is a vector of d integer decision variables in a feasible regionX, and is denoted by xi ¼ ðxi1; xi2; . . . ; xidÞ ¼ fxi‘; ‘ ¼ 1;2; . . . ; dg. Theexpected performances with respect to the objective and the con-straint are defined as gðxiÞ ¼ E½GjðxiÞ� and hðxiÞ ¼ E½HjðxiÞ� fori ¼ 1;2; . . . ; k; j ¼ 1;2; . . ., respectively. A general formulation ofthe constrained DOvS problem of interest is described as follows:
minxi2X
gðxiÞ;
where the feasible region X is defined by the following stochasticconstraint:
hðxiÞP Q ;

S.C. Tsai, S.Y. Fu / European Journal of Operational Research 236 (2014) 113–125 115
where the constant Q is specified by the analyst. The expected val-ues gðxiÞ and hðxiÞ are unknown and cannot be evaluated analyti-cally, but can be measured or estimated via a simulationexperiment at setting xi. We make the following assumption onðGjðxiÞ;HjðxiÞÞ for i ¼ 1;2; . . . ; k; j ¼ 1;2; . . .:
Assumption 1.
GjðxiÞHjðxiÞ
� ��iid BN
gðxiÞhðxiÞ
� �;Ri
� �;
where �iid denotes independent and identically distributed, BN repre-sents bivariate normally distributed, and Ri is the variance–covari-ance matrix of a vector ðGjðxiÞ;HjðxiÞÞ.
This normality assumption can be justified when the vectorðGjðxiÞ;HjðxiÞÞ is the average of some output random variables fromindependent multiple replications, or is a batch of successiveobservations within a single run of a steady-state simulation (seeLaw (2007)). Further, it is reasonable to assume dependence be-tween GjðxiÞ and HjðxiÞ, because the observations with respect todifferent performance measures from the same simulated solutionare usually correlated in practice (see Andradóttir & Kim (2010) forsome examples). We also assume that all solutions xi fori ¼ 1;2; . . . ; k are simulated independently (i.e., CRN is not usedacross different solutions). Our DOvS algorithms consist of twotypes of R&S procedures: FDP and the clean-up procedure. The effi-ciency of FDP will not be benefited by the use of CRN, since a fea-sibility check does not require comparisons among solutions. Inaddition, it is difficult for the two-stage clean-up procedure to ac-count for the effect of CRN, especially when the number of candi-date solutions is very large (see Nelson, Swann, Goldsman, &Song (2001) for a discussion). Without loss of generality, we as-sume that a smaller gðxiÞ corresponds to better performance (if xi
is a feasible solution). If larger expected performance is desired, wewill then multiply each observation GjðxiÞ by �1 before executingthe algorithm. To achieve global convergence for the algorithm de-scribed later in Section 3, we also need the following assumptionon the expected performance function associated with theconstraint.
Assumption 2. For every xi ¼ ðxi1; xi2; . . . ; xidÞ 2 Zd and xj ¼ ðxj1;
xj2; . . . ; xjdÞ 2 Zd, if xi‘ 6 xj‘; 8‘ 2 f1;2; . . . ; dg, then hðxiÞ 6 hðxjÞholds.
Note that Zd represents d-dimensional vectors with integercomponents. The above assumption implies that the constraint ex-pected performance hðxiÞ increases if we increase any componentof xi (some other components are probably fixed). This nonde-creasing assumption is quite reasonable for many service systems,such as call center staffing and emergency vehicle dispatching (e.g.,Atlason, Epelman, & Henderson, 2004; Cezik & L’Ecuyer, 2008). Forinstance, in a call center staffing problem, hðxiÞ could represent theaggregated service level over all periods, defined as the fraction ofcalls answered within a specified time limit. The staffing level xi isdefined as a vector, with the jth component xij giving the number ofemployees working the jth shift. In the literature related to thisproblem, it is often assumed that the service level is concave andcomponent wise increasing as a function of the staffing-levelvector.
In the following sections, we describe two GA-based algorithmsfor solving the DOvS problem with a single stochastic constraint.The proposed simulation optimization framework for both algo-rithms has three stages, Initialization, Searching & Comparing,and Selecting. Assumptions 1 and 2 are required for the statisticalvalidity of the first algorithm. This delivers global convergence asthe simulation effort approaches infinity, and also guarantees toselect the best among all potential solutions that have been
declared to be feasible by FDP. On the other hand, the second algo-rithm only needs Assumption 1. It can only pick up the best amonga small number of promising solutions (without achieving globalconvergence), but may demonstrate better empirical performancewhen given a fixed amount of sampling budget.
3. A globally convergent algorithm
In this section we present a statistically valid algorithm that canoffer global convergence as the number of samples goes to infinity,and at the same time guarantees to select the best among all poten-tial solutions that have been declared to be feasible by FDP with aspecified confidence level. In the Initialization stage we intend topick up a number of possibly feasible solutions that serve as startingsolutions for the next stage. We use FDP to ensure that the initialsolutions are feasible with a specified confidence level. In theSearching & Comparing stage we employ the Stochastically Con-strained Genetic Algorithm (SCGA) in conjunction with FDP to ex-plore the feasible region for promising solutions, where eachoperator of the conventional GA is adapted for efficient use in a sto-chastic environment. The operators used to make iterations aregrouping and mating, where a subset of current solutions (i.e.,parents) are selected based on their performance, and crossover,where the properties of each pair of solutions are integrated intoone, as well as mutation, where each offspring is modified basedon some rule. In the final stage we invoke the clean-up procedureproposed in Boesel et al. (2003) to select the best (with respect tothe stochastic objective) from the set of feasible solutions identifiedby SCGA. We use their clean-up procedure instead of the typicalRinott’s (1978) procedure, because the number of observationsalready taken from each solution is usually unequal. Notice that aheuristic search procedure like GA may revisit candidate solutions,and thus take different numbers of observations from them. Weuse Pt to denote the set of current population at the tth genera-tion, and use Ft (or Ut) to denote the feasible set (or infeasibleset) at the tth generation. A flowchart of GCDA is given in Fig. 1.A high-level description of the global convergent constrainedDOvS algorithm (denoted as GCDA) is described as follows. Inthe remainder of this section we will fill in specific pieces of thealgorithm.
Global Convergent Constrained DOvS Algorithm
Initialization: Randomly pick M solutions from the solutionspace and take n0 observations associated with ðGjðxiÞ;HjðxiÞÞfor each solution. We then implement FDP to identify feasiblesolutions with a specified confidence level. If the set of feasiblesolutions is empty, we return to the beginning of this stage. Ifthe number of feasible solutions is less than M, we generatenew solutions from the current feasible ones by increasingany of their coordinate components (inside the solution space)until M solutions are collected. Take n0 observations associatedwith ðGjðxiÞ;HjðxiÞÞ for those newly generated solutions. Set thegeneration counter t ¼ 0, and let the set of M solutions be theinitial population P0 and also the feasible set F0. Move the infea-sible solutions identified by FDP in this stage to the infeasibleset U0.Searching & Comparing (SCGA):Take the following steps,
Step 1. Grouping: Apply the Linear Ranking Scheme andGrouping Procedure (based on the aggregated sample meanswith respect to the objective performance GjðxiÞ) to assignselection probabilities to each solution among Pt .Step 2. Mating: Implement Stochastic Universal Sampling tochoose M parents randomly, with replacement, based on thepreviously assigned selection probabilities for each solutionamong Pt .

Initialization Apply FDP to form the
initial feasible population
Grouping: Apply grouping
procedure to assign
selection probabilities
Mating: Apply SUS to
choose M parents
Crossover: Apply max-min
arithmetical crossover and
the set check procedure for
each pair of parents
Mutation: Apply golden
section method to perform
uniform mutation
Searching&Comparing
Stopping
condition
satisfied?
Yes
Apply clean-up
procedure to select the
best solution Selecting
No
Fig. 1. Flowchart of GCDA.
116 S.C. Tsai, S.Y. Fu / European Journal of Operational Research 236 (2014) 113–125
Step 3. Crossover: Apply Max–min Arithmetical Crossover toeach pair of parents to generate four offspring. For eachgroup of offspring, use the Set Check Procedure to determinetheir feasibility, and pick up the best two solutions accordingto the aggregated sample means of the objective perfor-mance measure.Step 4. Mutation: For each offspring, determine if it needs toundergo mutation according to the specified mutationprobability p. Choose one coordinate of that solution witha probability 1=d. Use the Golden Section Method in combi-nation with the Set Check Procedure to find the lowerboundary of the feasible region (along the direction of thechosen coordinate). Then apply Uniform Mutation tochange its value.Step 5. Stopping rule: Terminate SCGA and go to Selectingstage if the budget or improvement conditions are satisfied.Otherwise, let t ¼ t þ 1 and go to Step 1.
Selecting (Clean Up): Apply Clean-up Procedure to all solutionsin the feasible set Ft to identify the best one.
Theorem 1. If Assumptions 1 and 2 hold, then SCGA attains globalconvergence as the number of generations goes to infinity.Furthermore, in the Selecting stage GCDA guarantees to select the bestsolution among the final feasible set Ft with a specified confidencelevel.
The proof of Theorem 1 is provided in Appendix A.
3.1. Initialization stage
In the Initialization stage, we first randomly choose M solutionsfrom the solution space, although some of these may not be feasi-ble. Notice that we require the initial solutions to be feasible withsome confidence level in order to deliver convergence to the globaloptimum as the number of simulated observations goes to infinity(see Appendix A.3). Therefore, we apply FDP to identify feasiblesolutions that satisfy the single specified stochastic constraintamong these M solutions. If some solutions are eliminated, we thengenerate new ones by increasing any coordinate value of the sur-viving solutions (uniformly inside the solution space), until thenumber of initial solutions is added up to M. More specifically,for xi (current feasible one) and xj (the new one), we will havexi‘ < xj‘ for one coordinate component and xi‘ ¼ xj‘ for the others.Based on Assumption 2, we can conjecture that these newly gener-ated solutions are also feasible. On the other hand, if FDP returnsan empty set, then we go back to the beginning of this stage (i.e.,generate M new solutions from the solution space). The same pro-cess is then repeated with the new set of solutions.
3.2. Searching & comparing stage
In the second stage we employ SCGA to search the entire solu-tion space for promising solutions. The basic elements of SCGA in-clude the fitness function, grouping procedure, parent selection,crossover operators, and mutation operators. ‘‘Fitness’’ is a termused in the GA literature to represent the value of the performancemeasure for a solution. Note that the fitness function we mainlyuse in the Grouping and Crossover steps corresponds to the aggre-gated sample means with respect to the objective performance. Ingeneral, the solutions with better fitness values are assigned a bet-ter chance of being selected for mating. We use FDP from time totime in the algorithm to check the feasibility of candidate solu-tions, and this is embedded into the set check procedure (describedin Section 3.2.3). When using FDP in the Crossover and Mutationsteps, the fitness function depends on the evaluation of the con-straint performance measure. Each step of the algorithm is de-scribed in detail as follows.
3.2.1. Grouping stepThe basic principle of GA is that solutions with better perfor-
mance should have a higher probability of surviving and being se-lected to generate new solutions through the crossover operator(i.e., they pass on their characteristics to future populations).Since our algorithm operates in a noisy environment, it is moredifficult to declare which solutions are truly better because ofthe sampling variance. We thus use the adapted linear rankingscheme (see Baker (1987)) together with a statistical groupingprocedure (see Boesel (1999)) to assign selection probabilities toeach solution among Pt . In the linear ranking scheme, each solu-tion’s survival probability depends only on the rank, not the mag-nitude, of the solution’s fitness value (estimated performance)within the current population. The implementation of a rank-based scheme means that the selection probabilities do notchange too drastically as a result of incorrect ranking (due tothe presence of stochastic variation). We also adopt the groupingapproach described in Boesel (1999), where the sample variance

S.C. Tsai, S.Y. Fu / European Journal of Operational Research 236 (2014) 113–125 117
information is considered and all members of each group are as-signed their group’s average selection probability. This approachis proven to minimize the difference between the selection prob-abilities assigned in deterministic and stochastic environments. Inthis way, the selection scheme is adapted for efficient use in astochastic setting.
3.2.2. Mating stepWe use stochastic universal sampling (SUS) to determine which
individuals are chosen for mating (reproduction). The SUS schemeconstructs a roulette wheel where the area for each solution in thecurrent population is proportional to its selection probability(which is computed in the Grouping step). A single spin of the rou-lette wheel will simultaneously select all the M individuals forreproduction. More specifically, after the spin the pointer will reston the area of some individual which is then selected as the firstparent. We then select other individuals as parents by advancingthe pointer at a constant spacing of 1=M (until we choose a totalof M parents). By contrast, the ordinary roulette wheel scheme(RWS) only selects one individual for one spin. The selected indi-viduals are placed back into the pool, and can be selected again.The process is repeated iteratively until M individuals are obtained.Therefore, the SUS scheme can achieve a certain spread because itensures that individuals are picked from the full range of descend-ing fitness values, whereas the RWS scheme might only pick fromthe top end of that ranking. In summary, the use of SUS schemehelps to prevent premature convergence by holding back outstand-ing individuals from taking over the population within a few gen-erations (see Baker (1987)).
3.2.3. Crossover stepIn this step we need to implement FDP repeatedly to determine
the feasibility of candidate solutions if necessary. To avoid incur-ring excessive sampling cost because of using FDP too often, we de-velop the set check procedure, which is valid because ofAssumption 2 (described as follows). Since a GA tends to generatethe same solution more than once, the set check procedure firstchecks the database to see if the solution has been visited previ-ously, or if the feasibility of that solution can be determined di-rectly based on Assumption 2. If not, we then implement FDP,and need to take observations from the solution. Suppose we havea new candidate solution xk ¼ ðxk1; xk2; . . . ; xkdÞ 2 Zd, and a feasibleset Ft and an infeasible set Ut , which consist of the solutions thathave been evaluated and determined to be feasible or infeasiblein previous iterations. We implement the set check procedure withregard to xk according to the following steps:
� For any j 2 Ft , if xk‘ P xj‘; 8‘ 2 f1;2; . . . ; dg, then we put xk intoFt .� For any j 2 Ut , if xk‘ 6 xj‘; 8‘ 2 f1;2; . . . ; dg, then we put xk into
Ut .� Otherwise we implement FDP to check the feasibility of xk.
In a typical GA we usually apply a crossover operator to inheritsome characteristics of any two parents to generate the offspring.In SCGA we use the max–min arithmetical crossover, which makesit easier to check the feasibility of each offspring (as will be ex-plained later). Given two parents xi ¼ ðxi1; xi2; . . . ; xidÞ andxj ¼ ðxj1; xj2; . . . ; xjdÞ, the arithmetical crossover creates two off-spring, x01 and x02, by generating a random number b from Uð0;1Þdistribution, and letting x01 ¼ bxi þ ð1� bÞxj andx02 ¼ ð1� bÞxi þ bxj. The other two offspring we generate (for eachpair of parents) are x03 ¼ fx03‘; ‘ ¼ 1;2; . . . ; dg with x03‘ ¼maxðxi‘; xj‘Þand x04 ¼ fx04‘; ‘ ¼ 1;2; . . . ; dg with x04‘ ¼minðxi‘; xj‘Þ. Based on thecondition that the solutions in Pt are declared to be feasible and
the establishment of Assumption 2, we can directly conjecture thatx03 is feasible with some confidence (without employing FDP). Onthe other hand, we need to use the set check procedure to checkthe feasibility of x04, and the results may help us quickly determinethe feasibility of x01 and x02. The detailed steps are summarized asfollows:
� If x04 is determined to be feasible, we can then declare that x01and x02 are also feasible with some confidence based on Assump-tion 2. We then put the solutions x01; x02; x03, and x04 into the fea-sible set Ft , and take n0 observations (with respect to theobjective performance) from these solutions. We choose thetwo best solutions based on the aggregated sample average ofGjðxiÞ, and proceed to the next step.� If x04 is determined to be infeasible, we then put x04 into the
infeasible set Ut and implement the set check procedure to x01and x02:– If x01 and x02 are both determined to be feasible, we put them
into the feasible set Ft , and take n0 observations (withrespect to the objective performance) from x01; x02 and x03.We choose the two best solutions from them based on theaggregated sample average of GjðxiÞ, and proceed to the nextstep.
– If x01 is determined to be feasible (or infeasible) and x02 isidentified to be infeasible (or feasible), we put them into Ft
or Ut and choose the two feasible solutions x03 and x01 (or x02).– If x01 and x02 are both declared to be infeasible, we put them
into Ut , select any one of the parents (xi or xj) along with x03and proceed to the next step.
In summary, we apply the max–min arithmetical crossover toeach pair of parents to produce four offspring (i.e., the linear com-binations, the maximum and the minimum values of all coordi-nates of any two parents). We then pick two solutions(corresponding to each pair of parents) that are declared to be fea-sible and have better estimated objective performance. This mech-anism is designed to ensure that the solutions in the pool Pt arefeasible (at least with a statistical guarantee), which is requiredto attain global convergence of SCGA. We use the max–min arith-metical crossover in order to explore as many different candidatesolutions as possible, and therefore making the searching processof our algorithm more likely to escape from local optimums.
3.2.4. Mutation stepThe purpose of using mutation operators is to randomly modify
the individual contents to promote the diversity of the currentpopulation. To achieve this, we implement uniform mutation,which is one of the commonly used mutation operators in realcoded GAs (see Michalewicz (1996)). For each offspring, we deter-mine if mutation needs to be performed based on the specifiedmutation probability p. We then choose one coordinate of thatsolution with a probability 1=d, and perturb its value randomlyalong the feasible region. For instance, if the second coordinate ofthe offspring xi is chosen, we then have a new mutated solutionx0i, as follows:
xi ¼ ðxi1; xi2; . . . ; xidÞ ! x0i ¼ ðxi1; x0i2; . . . ; xidÞ:
More specifically, we choose a new value of that coordinate ran-domly along the feasible region. However, the DOvS problem wewant to solve contains a stochastic constraint, which means it isdifficult (or impossible) to directly determine the boundary ofthe feasible region with respect to the chosen coordinate of the off-spring. We thus propose using the Golden Section method (seeBazaraa, Sherali, & Shetty (2006)) in combination with the setcheck procedure to efficiently find the lower boundary of the

118 S.C. Tsai, S.Y. Fu / European Journal of Operational Research 236 (2014) 113–125
feasible region (along the direction of the chosen coordinate). TheGolden Section method was originally developed as a sequentialsearch technique for finding the minimum or maximum of a uni-modal function by successively narrowing the range of parametervalues. Notice that the assumption of unimodal function is quiteanalogous to Assumption 2 (see Section 2). The basic idea is to re-gard the boundary of the feasible region of our problem as the opti-mal point of a unimodal function (assumed by the routine GoldenSection method). One advantage of using Golden Section method isthat we do not need to determine the number of function evalua-tions in advance, prior to starting the search (see Bazaraa et al.(2006)). We give an illustrative example as follows. Suppose thatthe range of parameter values of the chosen coordinate is between0 and 100. We first use the golden ratio s ¼ 0:618 to find twopoints x1 ¼ b100� 0:382c ¼ 38 and x2 ¼ b100� 0:618c ¼ 61. Wethen use the set check procedure to check the feasibility of x2: ifit is feasible, we keep searching inside the interval to the left ofx2 (since the interval to the right of x2 are feasible based onAssumption 2); if it is infeasible, we instead search inside the inter-val to the right of x2. In this case we assume that x2 is feasible, andtherefore evaluate a new point x3 ¼ b61� 0:382c ¼ 23. The pointx3 is determined to be infeasible, and thus we go to the right-handside of x3 and evaluate x4 ¼ 23þ bð61� 23Þ � 0:618c ¼ 46. Thispoint is found to be feasible, and we then evaluatex5 ¼ 23þ bð46� 23Þ � 0:618c ¼ 37. Finally, we find that x5 is infea-sible and x1 is feasible, and therefore the feasible region we adoptin this case is [38,100].
3.3. Selecting stage
At the end of the Searching & Comparing stage we have a set ofsolutions (Ft) that have been declared to be feasible, with a speci-fied statistical guarantee, either by employing FDP or by comparingwith those visited solutions already determined to be feasiblebased on Assumption 2. In this final stage those solutions arepassed to the clean-up procedure (see Boesel et al. (2003)), whichprovides a statistical confidence as to which of these is the best (interms of the stochastic objective function). The clean-up procedurewas originally developed to help identify the best solution amongthose discovered during a searching process. It is designed toquickly filter out obviously inferior solutions with a screening pro-cedure (using only the samples already collected by the searchingprocess), and then distinguish the best solution by carrying outadditional simulation effort from the remaining solutions. OurDOvS algorithm thus guarantees that it returns the best solutionwith a specified confidence level from all those visited by thesearching process. Of course, if the searching process visits allthe feasible solutions, then the statistical validity applies to the en-tire solution space. Notice that the screening procedure takes intoaccount the relative performance of the candidate solutions, andthis is a favorable feature, because there is very likely to be a largenumber of potential solutions with widely differing performance atthe end of the stochastic search.
4. A heuristic algorithm
In this section we propose a heuristic algorithm that can takeadvantage of the essential mechanics of GA, such as the adaptiveconstraint-handling techniques (see Coello (2002)) and elitism.The implementation of an elite population means that superiorsolutions are always conserved through evolutions, which is oftenused in routine GAs to speed up convergence. However, a conse-quence of using an elite population is that it invalidates the globalconvergence statement of our GA-based DOvS algorithm. The algo-rithm’s finite-time performance may be improved, because the
algorithm design is more flexible without adhering to the conver-gence claim. Another desirable feature of this algorithm is that wedo not use FDP so often (compared to GCDA); in this case FDP isonly applied to the elite population once in the final step. Noticethat we do not need to ensure that each solution in the currentpopulation is feasible with some specified guarantee, which ishowever required for GCDA to attain global convergence. We thusexpect to use less simulation effort in determining the feasibility,which means more solutions can be evaluated under a givenamount of sampling budget. Therefore, this approach is more likelyto uncover promising solutions in the searching process (in termsof the stochastic objective). In the Initialization stage we randomlypick up M solutions from the solution space and note that we donot use FDP here. In the Searching & Comparing stage we employthe Heuristic Constrained Genetic Algorithm (HCGA) to explorethe feasible region for promising solutions. A critical difference be-tween SCGA and HCGA is the fitness assignment. For HCGA, wetreat the objective and constraint separately when computing thefitness value, which is one of the commonly used constraint-han-dling techniques. We also introduce a penalty factor to eliminatethe selection bias (see Section 4.1). In the final stage we invokethe clean-up procedure proposed in Boesel et al. (2003) to selectthe best (with respect to the stochastic objective) among the elitepopulation identified by HCGA. The Selecting stage is basically thesame as that in SCGA, and the only difference is that the clean-upprocedure is applied to the possibly feasible solutions among theelite population, instead of the feasible set. A flowchart of HCDAis given in Fig. 2. A high-level description of the heuristic con-strained DOvS algorithm (denoted as HCDA) is given as follows.
Heuristic Constrained DOvS Algorithm
Initialization: Randomly pick up M solutions from the solutionspace and take n0 observations associated with ðGjðxiÞ;HjðxiÞÞfor each solution. Set the generation counter t ¼ 0, the elitepopulation E0 ¼ ;, and let the set of M solutions be the initialpopulation P0.Searching & Comparing (HCGA): Take the following steps,
Step 1. Compute the proportion of feasible solutions(denoted as pf ) among Pt based on sample means associatedwith the stochastic constraint.Step 2. Grouping: For each solution xi among Pt , apply theLinear Ranking Scheme and Grouping Procedure to assignselection probabilities for the stochastic objective and con-straint, respectively (denoted as si and di).Step 3. Fitness assignment: Use si; di, and pf (treated as apenalty factor) to compute the fitness value f ðxiÞ for eachsolution among Pt .Step 4. Mating: Implement Stochastic Universal Sampling tochoose M parents randomly, with replacement, based on thefitness value for each solution among Pt .Step 5. Crossover: Apply the traditional Arithmetical Cross-over to each pair of parents to generate two offspring.Step 6. Mutation: For each offspring, apply Non-uniformMutation to perturb its value, with mutation carried outaccording to the specified mutation probability p.Step 7. Evaluation: For each newly generated offspring,obtain n0 observations associated with the stochastic objec-tive and constraint.Step 8. Elite population: Based on the aggregated samplemeans, choose the best solution in terms of the objectiveperformance, among the solutions satisfying the stochasticconstraint. If all solutions violate the constraint, choose theone with the smallest amount of violation. In either case,obtain additional NA observations for the chosen solution,and move it to the elite population Et .

Initialization
Randomly generate M
solutions to form the
initial population
Grouping: Apply grouping
procedure to assign
selection probabilities for
the objective and constraint
Mating: Apply SUS to
choose M parents
Crossover: Apply
arithmetical crossover for
each pair of parents
Mutation: Apply
non-uniform mutation for
each offspring
Searching&Comparing
Stopping
condition
satisfied?
Yes
Apply clean-up
procedure to Et to select
the best solution
Selecting
No
Compute the proportion of
feasible solutions among
the current population
Compute fitness value for
each solution based on the
obtained information
Form the elite population
Et based on the aggregated
sample means
Fig. 2. Flowchart of HCDA.
S.C. Tsai, S.Y. Fu / European Journal of Operational Research 236 (2014) 113–125 119
Step 9. Generation of the next population: Combine the cur-rent offspring and parents, and choose the best M solutionsaccording to the rule described in the above step.Step 10. Stopping rule: Terminate HCGA and go to Step 11 ifthe budget or improvement conditions are satisfied. Other-wise, let t ¼ t þ 1, and go to Step 1.Step 11. Feasibility check: Apply FDP to all solutions in theelite population Et . If all solutions are declared to be infeasi-ble, then return to the Initialization stage. Otherwise, go tothe Selecting stage.
Selecting (Clean Up): Apply the Clean-up procedure to thepotential solutions (that have been declared to be feasible byFDP) among Et to identify the best one.
Theorem 2. If Assumption 1 holds, then in the Selecting stage HCDAguarantees to select the best solution among the elite population Et
with a specified confidence level.The proof here is straightforward.
4.1. Grouping step and fitness assignment
To obtain the selection probabilities with respect to the stochas-tic objective (denoted as si), we apply the linear ranking schemeand statistical grouping procedure to the objective performancevalues of each solution among Pt . Loosely speaking, the solutionswith better objective performance are assigned a higher probabil-ity of being selected for mating. In addition, the selection probabil-ities with respect to the stochastic constraint (denoted as di) aredetermined by evaluating each solution’s amount of violation(compared to the constraint threshold). Our approach is to treatconstraint satisfaction and objective performance separately whencomputing the fitness value, which is one strategy used to handleconstrained problems in the GA literature (see Ray, Kang, & Chye(2000)). Further, we introduce a so-called penalty factor pf to bal-ance the dominance between si and di for feasible and infeasiblesolutions. This can be done by discounting the fitness value of aninfeasible individual by the penalty factor pf which representsthe proportion of feasible solutions in the current population Pt .The feasibility of each solution is determined at this point by com-paring the sample average of the constraint performance with thethreshold. We then specify the fitness value as follows:
� If xi is feasible, we set f ðxiÞ ¼ ðsiþdiÞ2 .
� If xi is infeasible, we set f ðxiÞ ¼ðsi�pf Þþdi
2 .
When all the solutions in Pt are determined to be feasible(based on the aggregated sample average), we then set pf ¼ 1and the value of di is the same across all solutions. This implies thatthe fitness value f ðxiÞ is only dependent on the objective perfor-mance (i.e., si), and therefore the solutions having better objectiveperformance will be assigned a higher probability of surviving. Onthe other hand, when the current population Pt contains feasibleand infeasible solutions and the parameter pf is not used, the fit-ness value of infeasible solutions might be significantly better thanthat of feasible ones (if it has a very competitive objective perfor-mance). To alleviate this selection bias, the penalty factor pf is usedto decrease the value of f ðxiÞ for infeasible solutions. As a result, ifthe feasibility proportion pf is high, its impact against the fitnessvalue of infeasible solutions is not obvious. In contrast, if the feasi-bility proportion pf is low, the selection probability of infeasiblesolutions will be significantly decreased, which implicitly makesfeasible solutions easier to select. This approach appears to be sim-ilar to the idea of stochastic ranking proposed in Runarsson andYao (2000).
4.2. Crossover and mutation steps
In the Crossover step we apply the typical arithmetical cross-over to each pair of parents to produce two offspring. Michalewicz(1996) suggested that the arithmetical operator works the best forreal coded GAs. Given two parents xi ¼ ðxi1; xi2; . . . ; xidÞ andxj ¼ ðxj1; xj2; . . . ; xjdÞ, the arithmetical crossover produces two off-spring x01 and x02 by generating a random number b from theUð0;1Þ distribution, and letting x01 ¼ bxi þ ð1� bÞxj and

120 S.C. Tsai, S.Y. Fu / European Journal of Operational Research 236 (2014) 113–125
x02 ¼ ð1� bÞxi þ bxj. This can be regarded as a linear combination oftwo vectors. In the Mutation step we apply non-uniform mutationto perturb the value of each offspring, given that it needs to per-form mutation according to the specified mutation probability p.By contrast, for GCDA we need to use uniform mutation to preservethe guarantee of global convergence. The mutated element of xi,say x0i‘, is given by:
x0i‘ ¼xi‘ þ Dðt;ui‘ � xi‘Þ; with probability 0:5;xi‘ � Dðt; xi‘ � li‘Þ; with probability 0:5;
�
where t is the generation counter, ui‘ and li‘ are the upper and lower
bounds of xi‘, respectively, and Dðt; yÞ ¼ y 1� b 1� tTð Þb
� �. Here b is a
uniformly distributed random number in the interval ½0;1�; T isthe maximum number of generations allowed, and b is a parameterdetermining the degree of non-uniformity. In the initial generationsthe non-uniform mutation operator tends to explore the solutionspace uniformly, and in the later generations it tends to searchthe space locally (Michalewicz, 1996).
4.3. Elite population
In the Evaluation step, we take n0 observations for each newlygenerated offspring. Based on the accumulated sample means, wechoose the best solution in terms of the objective performance (ifthis solution satisfies the stochastic constraint). If all solutionsviolate the constraint, we then choose the one with the smallestamount of violation. In either case, we move the chosen solutionto the elite population Et and also obtain its additional NA
observations. Due to the effect of stochastic variation, the solutionwith the best sample average may not coincide with the true bestsolution encountered during the searching process. Therefore wepropose using the elite population to preserve all of thepotentially promising solutions and carrying out additionalsimulation replications to obtain more precise performanceestimators.
5. Empirical results
In this section, an extensive empirical evaluation is performedto compare the performance of the following algorithms for solvingthe DOvS problem with a single stochastic constraint:
1. The constrained DOvS algorithms proposed in Sections 3 and4 are performed, including the Global Convergent Con-strained DOvS Algorithm (GCDA) and Heuristic ConstrainedDOvS Algorithm (HCDA).
2. We also perform a modified version of GCDA, where FDP isreplaced by a fixed-sample-mean comparison, and it is calledFixed Sample Constrained Algorithm (FSCA). Notice that thealgorithm maintains the advantages of using a genetic algo-rithm, but cannot guarantee the feasibility and global con-vergence of the selected solution.
3. Lee et al. (2012) proposed a new optimal computing bud-get allocation (OCBA) approach for constrained R&S prob-lems. The goal is to maximize the posterior probability ofcorrectly selecting the best feasible solution within a givensimulation budget. Notice that the OCBA approaches donot provide a guaranteed probability of correct selection,but they work well for average cases.
We consider FSCA in the empirical study, because it can beviewed as a naive approach where the feasibility of each solutionis determined via a sample average, without using any statisticallyvalid procedure. The sample size is fixed and chosen arbitrarily bythe analyst before the experiment, and is set as thirty in the
following experiment. Note that the performance difference be-tween GCDA and FSCA represents the effect of using FDP (or not)in the constrained DOvS algorithm. For GCDA, HCDA and FSCA,we can terminate the Searching & Comparing stage at any pointat which acceptable performance has been achieved, althoughGCDA is globally convergent as the simulation effort goes to infin-ity. That is, the Searching & Comparing stage can be terminatedwhen the improvement in solution quality obtained upon a speci-fied number of consecutive generations is insignificant. This repre-sents the case when the chosen solution dominates the otherswithin these iterations. Of course, we can also terminate the algo-rithm when the specified sampling budget (in terms of the numberof simulation replications) is exhausted at the current generation.As for the OCBA algorithm, in each trial we first randomly select afixed number of solutions without replacement (within the solutionspace), and treat them as the set of available solutions at the begin-ning of the experiment. We then try to select the best solution bytaking into consideration of both optimality and feasibility amongthe randomly chosen solutions. Notice that the OCBA algorithmfinds good enough solutions with high probability by randomlysampling and evaluating enough of them. By contrast, GCDA andHCDA are guaranteed to choose the best from a small set of prom-ising solutions identified by the Searching & Comparing stage.
5.1. Configurations and experiment design
To obtain good control over the factors that can affect the per-formance of the algorithms, we select two known response-surfacefunctions to which we add normally distributed noise. The objec-tive function of the first test problem is the multimodal functionused in Xu et al. (2010), and is referred to as g1ðxi1; xi2Þ, wherethe ith solution is denoted by xi ¼ ðxi1; xi2Þ. We also impose a con-straint function h1ðxi1; xi2Þ to define the feasibility of each solution.The first test problem is then formulated as follows:
min g1ðxi1; xi2Þ ¼sin6ð0:05pxi1Þ
22xi1�10
80
� �2 þ sin6ð0:05pxi2Þ
22xi2�10
80
� �2
s:t: h1ðxi1; xi2Þ ¼ lnðxi1 þ 1Þ þ lnðxi2 þ 1ÞP Q
where we set 0 6 xi‘ 6 100; xi‘ 2 Zþ, for ‘ ¼ 1;2. Therefore, we havea total of 1012 ¼ 10;201 candidate solutions. When only consider-ing the objective function, this problem contains twenty-five localoptimums and a global one, and it represents a response surfacewhere most solutions differ widely in performance. To examinethe performance of the algorithms when encountering differentproportions of feasible solutions (in the solution space), the valueof Q is varied with Q ¼ 6:6; 7:4, and 8.5 in the experiments. Forthe case of Q ¼ 6:6, we have 7628 feasible solutions (accountingfor 75% of the solution space), which is considered as a scenariowith a high percentage of feasible solutions in the whole space.The global optimum is located at ð30;30Þ, with the objective value�1.83. For the case of Q ¼ 7:4, we have 5599 feasible solutions(accounting for 55% of the solution space), which is considered asa scenario with a medium level percentage of feasible solutions inthe whole space. The global optimum is located at ð50;50Þ, withthe objective value �1.41. The worst case we consider in the exper-iment corresponds to the setting of Q ¼ 8:5, where we have 1897feasible solutions (accounting for only 18% of the solution space).The global optimum is located at ð70;70Þ, with the objective value�0.92. We add normally distributed noise with zero mean to theobjective and constraint functions. The standard deviation of thenoise is set at r ¼ 0:3 or 0.6 in the experiment, representing alow or high level of output variability, respectively.
The second known test function of the response surface is thesingular function extended from Hong (2004). We also add a sto-chastic constraint to make it a constrained DOvS problem. The

S.C. Tsai, S.Y. Fu / European Journal of Operational Research 236 (2014) 113–125 121
ith solution of the problem is denoted by xi ¼ ðxi1; xi2; xi3; xi4Þ. Theconstrained problem is formulated as follows:
min g2ðxi1; xi2; xi3; xi4Þ ¼ ðxi1 þ 10xi2Þ2 þ 5ðxi3 � xi4Þ2 þ ðxi2 � 2xi3Þ4
þ 10ðxi1 � xi4Þ4 þ 1s:t: h2ðxi1; xi2; xi3; xi4Þ ¼ 0:2xi1 þ 0:3xi2 þ 0:4xi3 þ 0:5xi4 P Q
where we set �100 6 xi‘ 6 100; xi‘ 2 Z, for ‘ ¼ 1; 2; 3; 4. There-fore, we have a total of 2014 � 1:6� 109 candidate solutions. Whenonly considering the objective function, this problem has three localoptimums and a global one, and these solutions are close to eachother. This implies that we have a small number of tightly clusteredlocal optimums in the solution space. Similar to the previous testproblem, we use three different values of Q in the experiments.For the case of Q ¼ �25, we have 1:16� 109 feasible solutions(accounting for 72% of the solution space), which is considered asa scenario with a high percentage of feasible solutions in the wholespace. The global optimum is located at ð0;0; 0;0Þ, with the objec-tive value 1. For the case of Q ¼ �5, we have 8:9� 108 feasible solu-tions (accounting for 55% of the solution space), which isconsidered as a scenario with a medium level percentage of feasiblesolutions in the whole space. The global optimum is located atð0;0;0;0Þ, with the objective value 1. The last scenario we considerin the experiment corresponds to the setting of Q ¼ 25, where wehave around 4:7� 108 feasible solutions (accounting for only 29%
of the solution space). The global optimum is located atð24;0;18;26Þ, with the objective value 2233. We add normally dis-tributed noise with zero mean to the functions g2 and h2. The stan-dard deviation of the noise is set as r ¼ 10 or 40 in the experiment,representing a low or high level of output variability, respectively.
Notice that in practice the simulated system is often so complexthat the objective and constraint functions are not analyticallytractable, and thus are unknown. However, the expected functionstructure is not required for the application (or validity) of ouralgorithms. For each problem configuration, 100 macro-replica-tions (complete repetitions) of each algorithm are performed. Inall experiments, the nominal probability of correct selection isset at 1 � a = 0.95. To compare the performance of the algorithmswe record the Average Performance (i.e., expected value of theobjective response function) of the final selected solution (AP),the Average Number of Visited solutions (ANV), the Average Num-ber of Samples (ANS) required by each algorithm (without dividingby the number of visited solutions). We also record the estimatedProbability of Correct Decision (PCD) which stands for the proba-bility of correctly identifying feasible solutions (for 100 macro-rep-lications). The feasibility of the final selected solution in each trialcan be determined easily by comparing the expected constraintfunction with the threshold value. To simplify the experimentalpresentation, we round the values of AP to the nearest thousandth,the values of PCD to the nearest hundredth, and the values of ANVand ANS to the nearest whole number. The detailed parameter
Table 1Parameter settings for GCDA.
Parameter Functionality
M Population sizeg Linear ranking coefficientp Mutation probabilitya1 Allowable error for FDPa2 Overall allowable error for clean-as Allowable error for the screeningaI Allowable error for the selectionn0 Initial number of observationsgm Minimum number of groups in thdm Indifference-zone parameter for tds Indifference-zone parameter for t
settings for GCDA are provided in Table 1. The parameter settingsfor HCDA are essentially the same as those of GCDA, except thatwe set a1 ¼ a2 ¼ 1�
ffiffiffiffiffiffiffiffiffiffiffiffi1� ap
. Notice that after using FDP to pickup feasible solutions in the elite population Et , we restart fromscratch the simulation of each survivor in the Selecting stage. Thisprocess can be regarded as one variant of the Restarting Procedure,which is defined in Section 4.2 of Andradóttir and Kim (2010).Therefore we can use the same derivation as in Theorem 3 ofAndradóttir and Kim (2010), and conclude that the probability ofcorrect selection is greater than ð1� a1Þ � ð1� a2Þ. The additionalcontrol parameters for HCDA are the non-uniformity parameterb ¼ 1:5, maximum number of generations allowed T ¼ 50 (forthe Mutation step), and the additional number of observations(NA ¼ 20) taken for solutions within the elite population. As forthe OCBA algorithm, the ANV value shown in the experimental re-sults represents the number of candidate solutions randomly cho-sen within the solution space. Each solution is initially sampledwith n0 ¼ 10 replications and additional D replications are allo-cated incrementally in each iteration until the total sampling bud-get is exhausted. The value of D is set around one-third of the ANVvalue. We present experimental results of OCBA whose ANS valueis close to the specified sampling budget.
5.2. Experimental results
The performance plot demonstrates the average for one hundredtrials of the true expected objective value of the final solution se-lected by each algorithm (i.e., AP) as a function of the number ofreplications consumed. First, we look at an easy scenario for the firsttest problem (with Q ¼ 7:4 and r ¼ 0:3), where half solution spaceis feasible and the stochastic variation is low. In Fig. 3 we can seethat HCDA performs the best in terms of AP, which is not surprisingbecause it spends less simulation effort in determining the feasibil-ity of each solution. This implies that more solutions can be evalu-ated when compared to other algorithms (under a given amount ofsampling budget), and thus it is more likely to uncover promisingsolutions (in terms of the objective function). This argument canbe validated by observing that HCDA visits the most candidate solu-tions in Table 2 (i.e., it has the largest ANV). Another factor contrib-uting to HCDA’s success is the use of an elite population, whichpreserves potentially superior solutions through evolutions. In theempirical study, it should be noted that OCBA is the only algorithmthat is not combined with GA. Therefore it is not surprised that ourprocedures have better performance because GA samples promis-ing solutions more intelligently, while we randomly pick up candi-date solutions for OCBA. In the experiments we use OCBA as abenchmark for comparison because it is possibly the most efficientR&S procedure to achieve an approximate probability of correctselection (in terms of required simulation efforts; see Branke, Chick,& Schmidt (2007)). We believe it is worthwhile to develop efficientalgorithms that can take advantage of both Bayesian-type
Value
501.50.3280.05
up procedure 0.05procedure in clean-up procedure 0.025
procedure in clean-up procedure 0.02510
e grouping procedure 3he multimodal problem 0.1he singular problem 10

Fig. 3. Performance plot for the multimodal function when Q ¼ 7:4 and r ¼ 0:3.
Table 2Performance measures for the four algorithms under the multimodal function whenQ ¼ 7:4 and r ¼ 0:3 (budget rule).
Sampling budget Performance GCDA HCDA FSCA OCBA
AP �0.917 �1.357 �1.101 �0.740ANV 399 652 459 400
5000 ANS 7036 7059 7199 7120PCD 1 1 0.97 1
AP �0.963 �1.392 �1.138 �0.741ANV 577 1046 702 580
10,000 ANS 11,257 12,196 11,182 12,070PCD 1 1 0.97 1
AP �1.018 �1.392 �1.145 �0.813ANV 743 1249 912 750
15,000 ANS 15,566 14,858 14,133 15,750PCD 1 1 0.96 0.99
AP �1.038 �1.396 �1.169 �0.840ANV 907 1598 1148 910
20,000 ANS 19,390 19,734 19,971 19,900PCD 1 1 0.98 1
AP �1.079 �1.404 �1.224 �0.893ANV 1388 2495 1739 1392
30,000 ANS 32,927 32,397 32,241 32,944PCD 1 1 0.96 0.98
AP �1.088 �1.405 �1.232 �0.914ANV 1865 3452 2329 1865
40,000 ANS 47,510 46,603 47,141 47,790PCD 1 1 0.98 1
AP �1.103 �1.405 �1.241 �0.919ANV 2119 3902 2841 2120
50,000 ANS 54,400 53,289 55,314 55,500PCD 1 1 0.98 1
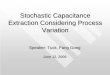
Fig. 4. Performance plot for the singular function when Q ¼ �25 and r ¼ 10.
Fig. 5. Performance plot for the singular function when Q ¼ 25 and r ¼ 40.
122 S.C. Tsai, S.Y. Fu / European Journal of Operational Research 236 (2014) 113–125
procedures (e.g., OCBA) and GA for constrained simulation optimi-zation. However this topic requires extensive investigation and isbeyond the scope of the paper (see Section 6 for a discussion). No-tice that the paper focuses on selection procedures that take afrequentist perspective. We also find that the PCD of FSCA is smal-ler than that of the other algorithms, because it only uses ordinarysample means to check the feasibility (sample size of thirty in ourexperiment). In other words, the disadvantage of FSCA is that itlacks the ability to choose an appropriate sample size value (tocheck the feasibility), and thus cannot deliver a sound statisticalguarantee. By contrast, for the procedures GCDA and HCDA whichuse FDP, the more stochastically variant the solution is, the largerthe sample size that will be specified automatically (in order to sat-isfy the PCD requirement; see Remark A.1). Notice that in this easy
scenario we have a low level of stochastic variation, and thereforethe inferiority of FSCA regarding PCD is not very obvious, as thePCD value for FSCA is still greater than 0:95.
Fig. 4 illustrates the performance of each algorithm (in terms ofAP) for an easy scenario of the second test problem (with Q ¼ �25and r ¼ 10), where a 72% solution space is feasible and the sto-chastic variation is low. For this relatively easy case we can see thatGCDA, HCDA and FSCA can reach near optimal solutions whenusing more than 40,000 replications. Further, in the initial evolu-tion the AP performance of GCDA is better than that of FSCA. Thisis due to the fact that FSCA may prescribe more samples thanneeded to check the feasibility for this easy scenario. In the exper-iments we compute the sample averages of thirty replications forFSCA, and use n0 ¼ 10 as the initial number of replications forthe FDP part of GCDA. In other words, the total number of replica-tions required to check the feasibility (determined by FDP) may beless than thirty. We obtain a small number of samples initially, andgo back for more only when necessary. Therefore, in this caseGCDA may visit more solutions than FSCA, and be able to uncovermore promising ones. We also present results for the difficult sce-nario of the second test problem (with Q ¼ 25 and r ¼ 40) in Fig. 5and Table 3. In this scenario, only 29% of the solution space is fea-sible and the level of stochastic variation is high. The AP perfor-mances of HCDA and FSCA are superior to those of the otheralgorithms, although they have inferior PCD performances. In thiscase the inferiority of the AP performances for OCBA is more obvi-ous. Notice that in this difficult scenario it is possible that all the

Table 3Performance measures for the four algorithms under the singular function whenQ ¼ 25 and r ¼ 40 (budget rule).
Sampling budget Performance GCDA HCDA FSCA OCBA
AP 18,883 5479 8010 67,740ANV 643 1044 655 645
10,000 ANS 11,756 10,605 11,407 11,825PCD 1 0.92 0.93 0.95
AP 15,995 3879 4665 62,940ANV 819 1500 883 820
15,000 ANS 15,726 15,297 15,452 15,760PCD 1 0.94 0.93 0.93
AP 12,597 4602 4566 57,496ANV 1085 1988 1215 1085
20,000 ANS 21,743 20,850 21,409 21,650PCD 1 0.91 0.88 0.94
AP 9959 3978 3815 47,299ANV 1962 3915 2363 1960
40,000 ANS 41,795 41,052 41,831 42,350PCD 1 0.92 0.88 0.93
AP 7711 3425 3312 41,010ANV 2844 5810 3495 2845
60,000 ANS 62,026 61,158 61,917 62,650PCD 1 0.92 0.86 0.96
AP 7043 3155 2985 37,660ANV 3665 7781 4594 3665
80,000 ANS 82,098 81,158 82,168 81,790PCD 1 0.92 0.80 0.89
AP 6810 2988 2799 34,618ANV 4552 9700 5750 4555
100,000 ANS 101,995 101,152 102,196 103,310PCD 1 0.90 0.85 0.88
S.C. Tsai, S.Y. Fu / European Journal of Operational Research 236 (2014) 113–125 123
solutions contained in the elite population are not feasible, whichalso somewhat explains why HCDA cannot attain the global con-vergence guarantee. As the percentage of feasible solutions in thesolution space is smaller (or the noise variance is larger), the PCDperformances of HCDA, FSCA and OCBA deteriorate significantly,while the PCD values of GCDA are still over the nominal level spec-ified in FDP (i.e., 0.95, see Table 1). The fixed-sample-size algo-rithms are appropriate to use when the stochastic variation islow enough (or the sample size is large enough), so that the assign-ment of selection probabilities and the feasibility check are accu-rate enough to allow choosing a promising solution. If thesample size is set too low, we may use too few data for each solu-tion, making the algorithms become pure random search methods,or leading to an infeasible solution. If the sample size is set toolarge, then too much sampling cost is wasted on inferior solutions,thereby reducing the number of solutions that can be evaluatedunder a given sampling budget. By contrast, GCDA can provide afeasibility guarantee for the chosen solution by implementingFDP, although in this case more sampling cost is usually needed.We can see that the statistical guarantee becomes more and moredifficult to obtain as problem dimensionality d increases. In otherwords, the difference between GCDA and HCDA (in terms of AP)becomes more substantial as the dimensionality increases. For in-stance, when given a sampling budget of 40,000, there is an in-crease of 23% in the AP of GCDA when compared to HCDA andd ¼ 2 (as shown in Table 2). By contrast, the AP value of GCDA isapproximately 2.5 times that of HCDA when d ¼ 4 (as shown in Ta-ble 3). We believe that this is a price we need to pay to attain bothprovable convergence and guaranteed feasibility.
6. Conclusions
In this paper we present two GA-based efficient algorithms thatare specifically designed for the DOvS problem with a single stochas-tic constraint. We use GA to guide the searching process in a noisy
environment, because it seems quite robust to statistical errors intro-duced in the performance estimates (see Boesel (1999)). The firstproposed algorithm, GCDA, guarantees global convergence as thesimulation effort goes to infinity, and at the same time guaranteesto select the best among all visited solutions that have been declaredto be feasible (upon termination of the algorithm) with a specifiedconfidence level (see Remark A.2). The second algorithm HCDA pur-sues finite-time empirical efficiency and focuses on employing adap-tive constraint-handling techniques and the mechanism of elitepopulation. If statistical validity is a concern of the analyst, we rec-ommend using GCDA. If the analyst can tolerate the lack of statisticalvalidity and the problem dimension d is not small (or the level of sto-chastic variation is low), then HCDA is recommended.
There are several possible directions to extend the methodologydeveloped in the paper. For instance, we could exploit variancereduction techniques to improve the algorithm’s efficiency (Tsai& Kuo, 2012). Another possible extension is to use other metaheu-ristics to guide the searching process (e.g., simulated annealing).The other possible extension is to consider the DOvS problem withmultiple stochastic constraints (Batur & Kim, 2010). Notice that theconservatism of the feasibility check procedure becomes moreserious as the number of solutions or constraints increases. Thisimplies that our GA-based algorithms may lead to excessive sam-pling cost, especially for the case of GCDA where FDP is repeatedlyemployed in the searching process. We may also need to determineappropriate weights regarding the relative importance of each con-straint when evaluating each solution’s amount of violation (com-pared to the constraint threshold). The other research topic worthyinvestigating is to incorporate OCBA into GA-based algorithms forconstrained simulation optimization. For instance, we could stopan OCBA call in each iteration when an approximate probabilityof good selection or the expected opportunity cost reaches a pre-specified level (see Branke et al. (2007)). We also could employthe subset selection procedure of Chen, Fu, and Lee (2008) tochoose an elite population for each generation of GA. Some exten-sion of these existing procedures is required to handle stochasticconstraints. It would be better to exploit accumulated simulationobservations since GA may revisit candidate solutions.
Appendix A
A.1. Feasibility determination procedure
In this subsection we describe the Feasibility DeterminationProcedure (FDP) proposed by Andradóttir and Kim (2010) that willbe used repeatedly in our algorithms. FDP checks the feasibility ofeach solution among a finite set with respect to a stochastic con-straint. However, for stochastic problems it is not always possibleto identify the solutions that satisfy the stochastic constraint ex-actly with a finite number of simulated observations. Andradóttirand Kim (2010) thus introduced a tolerance level, which allowschoosing the solutions whose expected performance correspond-ing to the stochastic constraint is within a so-called acceptable re-gion, which is looser than the defined true feasible region. Thefollowing description and notations are based on Andradóttir andKim (2010). First, we need to specify the lower and upper boundvalues for the constant Q, namely ðQ�;QþÞ, such thatQ� 6 Q 6 Qþ. Then, three regions for solution xi are defined:
� hðxiÞP Qþ: This is called the desirable region. Any solution inthis region is feasible and accepted.� Q� < hðxiÞ < Qþ: This is called the acceptable region. Any solu-
tion in this region is near feasible and can be accepted.� hðxiÞ 6 Q�: This is called the unacceptable region. Any solution
in this region is infeasible and will be rejected.

124 S.C. Tsai, S.Y. Fu / European Journal of Operational Research 236 (2014) 113–125
For convenience, we also define the following notations:
k � the number of solutions to be examined with regard to theirfeasibility;n0 � initial sample size for each solution ðn0 P 2Þ;r � the current observation counter ðr P n0Þ;S2
i � sample variance of H1ðxiÞ; . . . ;Hn0 ðxiÞ for i ¼ 1;2; . . . ; k;Rðr; v ;w; zÞ � maxf0; wz
2v � vr2 g, for any v;w; z 2 R;v – 0;
gðgÞ � 12� ð1þ 2gÞ�ðn0�1Þ=2.
Feasibility Determination Procedure (FDP)
Setup: Select initial sample size n0 P 2 and confidence level0 < 1� a1 < 1. For the constraint under consideration, chooseq and � such that q ¼ ðQ� þ QþÞ=2 and � ¼ ðQþ � Q�Þ=2. Com-pute g1 > 0, a solution to
gðg1Þ ¼ 1� ð1� a1Þ1=k:
Initialization: Let L ¼ f1;2; . . . ; kg and F ¼ ; be the set of solu-tions whose feasibility is not determined yet and the set of fea-sible solutions, respectively. Let h2
1 ¼ 2g1ðn0 � 1Þ. Obtain n0
observations HjðxiÞ; j ¼ 1;2; . . . ;n0, from each solution i. Com-pute S2
i , set the observation counter r ¼ n0 and go to FeasibilityCheck.Feasibility Check: For each solution i 2 L, if
Prj¼1ðHjðxiÞ�
qÞP þRðr; �;h21; S
2i Þ, then move i from L to F; else ifPr
j¼1ðHjðxiÞ � qÞ 6 �Rðr; �;h21; S
2i Þ, then eliminate i from L.
Stopping Rule: If jLj ¼ 0, then return F as a set of feasible solu-tions. Otherwise, take one additional observation Hrþ1ðxiÞ fromeach solution i 2 L, set r ¼ r þ 1, and go toFeasibility Check.
Remark A.1. Andradóttir and Kim (2010) proved that underAssumption 1, FDP will return a set of solutions that includes alldesirable and some acceptable solutions with a specified confi-dence level 1� a1.
A.2. Clean-up procedure
For convenience we define the following notations:
k � the number of remaining solutions from which we want toselect the best;ni � the number of replications already carried out on solution i(in the searching process);S2
i � sample variance of G1ðxiÞ; . . . ;GniðxiÞ for i ¼ 1;2; . . . ; k;
Xið1Þ � sample mean of G1ðxiÞ; . . . ;GniðxiÞ for i ¼ 1;2; . . . ; k.
Clean-Up Procedure
Step 1. Set the overall desired confidence level 1� a2 such that1=k < 1� a2 < 1, and as ¼ a2=2 for the screening procedure,aI ¼ a2=2 for the selection procedure, and indifference-zoneparameter d > 0.Step 2. Given GjðxiÞ; i ¼ 1;2; . . . ; k; j ¼ 1;2; . . . ;ni, compute Xið1Þand sample variance S2
i . Let
Wij ¼t2
i S2i
niþ
t2j S2
j
nj
!1=2
where ti ¼ tð1�asÞ1=ðk�1Þ ;ni�1:
Step 3. Set J ¼ fi : 1 6 i 6 k and �Xið1Þ 6 �Xjð1Þ þWij;8i – jg andreturn J as the subset of retained solutions.Step 4. Set nmin ¼minifnig and h ¼ hð2; ð1� aIÞ1=ðk�1Þ
;nminÞwhich is the extended Rinott’s (1978) constant. Determine thetotal required sample size for each solution i 2 J:
Ni ¼max ni;hSi
d
� �2& ’( )
:
Step 5. Take Ni � ni additional replications from each solution i.Select the best solution i with the smallest overall sample meanXið2Þ ¼
PNij¼1GjðxiÞ=Ni.
Remark A.2. Recall that gðxiÞ denotes the expected performancemeasure of objective function of solution i, for i ¼ 1;2; . . . ; k.Suppose that, unknown to us, gðxkÞ 6 gðxk�1Þ 6 6 gðx1Þ andthat a smaller mean is better. Boesel et al. (2003) proved that underthe assumption that the simulation output data GjðxiÞ are normallydistributed (which is implied by Assumption 1), the clean-upprocedure satisfies the following probability statement:
Prfselect xkjgðxk�1Þ � gðxkÞP dg 1� a2:
A.3. Proof of the global convergence of SCGA
We use a similar argument as in Appendix A.1 of Xu et al.(2010). First, we introduce the notations that we will use in thisproof. Let X denote the feasible region that is defined by the sto-chastic constraint, and let a1 denote the allowable error of feasibil-ity check in FDP. We also let Sk denote the set of solutions sampledin the kth generation. To attain the global convergence of SCGA asthe number of generations goes to infinity, we need to satisfy thefollowing requirements:
1. In the Initialization stage, the initial M solutions are feasible (atleast with the specified confidence level).
2. In the Mating step of the kth generation, any solution sampledin the ðk� 1Þth generation (i.e., population Pk) has a probabilityof at least p1 > 0 (based on the selection probabilities assignedin the Grouping step) of being selected for crossover.
3. In the Crossover step, any parent solution has a probability of atleast p2 > 0 of being generated as an offspring. Further, the gen-erated offspring has a probability of at least 1� a1 > 0 of beingdetermined as feasible (if it is truly feasible).
4. In the Mutation step, any offspring solution generated in theabove step has a probability of at least p3 > 0 (i.e., the specifiedmutation probability p) of being chosen for mutation.
5. In the Mutation step, each coordinate of the chosen offspringmight be selected with a probability of at least p4 > 0 (i.e.,1=d), because we implement uniform mutation here. Further,each feasible solution along the chosen coordinate may beselected with a probability of at least p5 > 0, because weemploy the Golden Section method in combination with theset check procedure here.
Notice that the validity of the set check procedure depends onAssumption 2 and the condition that the solutions among Pk arefeasible with some confidence. We also need Requirement 1 tospecify that the solutions among P0 are feasible with some confi-dence. Of course, the analyst could remove Assumption 2 to makeit a more general algorithm. The only consequence is that we needto implement FDP to nearly every sampled solution to check itsfeasibility, resulting in more computational time being needed.Further, we establish Assumption 1 to support the validity of FDPand the clean-up procedure. For any two solutions xi;xj 2 X, wecan find a path denoted as xi; y1; y2; . . . ; yjXj�1;xj, which means thatany two consecutive solutions in the path differ at most by onecoordinate. If xi 2 Sk, then it could be selected for crossover inthe ðkþ 1Þth generation with a probability of at least p1. If it is se-lected as a parent solution, it is reproduced as an offspring with aprobability of at least p2. It is then chosen for mutation with aprobability of at least p3. We implement FDP to each sampled solu-

S.C. Tsai, S.Y. Fu / European Journal of Operational Research 236 (2014) 113–125 125
tion once, at most. Therefore, it is determined to be feasible (if it istruly feasible) with a probability of at least 1� a1. Finally, if it ischosen for mutation, then y1 will be visited in the ðkþ 1Þth gener-ation with a probability of at least p4p5. We thus havePrfy1 2 Skþ1jxi 2 SkgP
Q5i¼1pi � ð1� a1Þ, and can obtain
Prfxj 2 SkþjXjjxi 2 Skg ¼ Prfy1 2 Skþ1jxi 2 SkgPrfy2 2 Skþ2jy1
2 Skþ1g � � Prfxj 2 SkþjXjjyjXj�1 2 SkþjXj�1g
Y5
i¼1
pi � ð1� a1Þ" #jXj
:
Notice that the above result holds for any two solutions in thefeasible region, which means that any solution could be sampledin any possible path of jXj generations (with a positive probabil-ity). This implies that all feasible solutions are visited infinitely of-ten as the number of generations goes to infinity. The globalconvergence of SCGA is thus a direct consequence of the stronglaw of large numbers.
References
Abo-Hamad, W., & Arisha, A. (2013). Simulation-based framework to improvepatient experience in an emergency department. European Journal of OperationalResearch, 224, 154–166.
Andradóttir, S., & Kim, S. H. (2010). Fully sequential procedures for comparingconstrained systems via simulation. Naval Research Logistics, 57, 403–421.
Arreola-Risa, A., Giménez-García, V. M., & Martínez-Parra, J. L. (2011). Optimizingstochastic production-inventory systems: A heuristic based on simulation andregression analysis. European Journal of Operational Research, 213, 107–118.
Atlason, J., Epelman, M. A., & Henderson, S. G. (2004). Call center staffing withsimulation and cutting plane methods. Annals of Operation Research, 127,333–358.
Baker, J. E. (1987). Reducing bias and inefficiency in the selection algorithm. InProceedings of the 2nd international conference on genetic algorithms (pp. 14-21).
Batur, D., & Kim, S. H. (2010). Finding feasible systems in the presence of constraintson multiple performance measures. ACM Transactions on Modeling and ComputerSimulation, 20(13), 1–26.
Bazaraa, M. S., Sherali, H. D., & Shetty, C. M. (2006). Nonlinear programming: Theoryand algorithms. New York: John Wiley and Sons.
Bhatnagar, S., Hemachandra, N., & Mishra, V. K. (2011). Stochastic approximationalgorithms for constrained optimization via simulation. ACM Transactions onModeling and Computer Simulation, 21(15), 1–22.
Boesel, J. (1999). Search and selection for large-scale stochastic optimization. Doctoraldissertation. Evanston, IL: Department of IEMS, Northwestern University.
Boesel, J., Nelson, B. L., & Ishii, N. (2003). A framework for simulation-optimizationsoftware. IIE Transactions, 35, 221–230.
Boesel, J., Nelson, B. L., & Kim, S. H. (2003). Using ranking and selection to ‘‘clean up’’after simulation optimization. Operations Research, 51, 814–825.
Branke, J., Chick, S. E., & Schmidt, C. (2007). Selecting a selection procedure.Management Science, 53, 1916–1932.
Cezik, M. T., & L’Ecuyer, P. (2008). Staffing multiskill call centers via linearprogramming and simulation. Management Science, 54, 310–323.
Chen, E. J. (2011). A revisit of two-stage selection procedures. European Journal ofOperational Research, 210, 281–286.
Chen, C. H., Fu, M., & Lee, L. H. (2008). Efficient simulation budget allocation forselecting an optimal subset. Informs Journal on Computing, 20, 579–595.
Coello, C. A. C. (2002). Theoretical and numerical constraint-handling techniquesused with evolutionary algorithms: A survey of the state of the art. ComputerMethods in Applied Mechanics and Engineering, 191, 1245–1287.
Guan, X., Song, C., Ho, Y.-C., & Zhao, Q. (2006). Constrained ordinal optimization – Afeasibility model based approach. Discrete Event Dynamics Systems, 16, 279–299.
Hong, L. J. (2004). Discrete optimization via simulation: algorithms and error control.Doctoral dissertation. Evanston, IL: Department of IEMS, NorthwesternUniversity.
Hong, L. J., & Nelson, B. L. (2006). Discrete optimization via simulation usingCOMPASS. Operations Research, 54, 115–129.
Hong, L. J., & Nelson, B. L. (2009). A brief introduction to optimization viasimulation. In M. D. Rossetti, R. R. Hill, B. Johansson, A. Dunkin, & R. G. Ingalls(Eds.), Proceedings of the 2009 winter simulation conference (pp. 75–85).Piscataway, NJ: Institute of Electrical and Electronics Engineers.
Horng, S. C., Lin, S. Y., Lee, L. H., & Chen, C. H. (2013). Memetic algorithm for real-time combinatorial stochastic simulation optimization problems withperformance analysis. IEEE Transactions on Cybernetics, 43, 1495–1509.
Hunter, S. R., & Pasupathy, R. (2013). Optimal sampling laws for stochasticallyconstrained simulation optimization on finite sets. Informs Journal onComputing, 25, 527–542.
Jia, Q. S. (2009). Improved constrained ordinal optimization for simulation-basedconstrained optimization. In The proceedings of the joint 48th IEEE conference ondecision and control and 28th Chinese control conference, Shanghai, P.R. China (pp.2315–2320).
Kabirian, A., & Ólafsson, S. (2009). Selection of the best with stochastic constraints.In M. D. Rossetti, R. R. Hill, B. Johansson, A. Dunkin, & R. G. Ingalls (Eds.),Proceedings of the 2009 winter simulation conference (pp. 584–589). Piscataway,NJ: Institute of Electrical and Electronics Engineers.
Kim, S. H., & Nelson, B. L. (2006). Selecting the best system. In S. G. Henderson & B. L.Nelson (Eds.), Handbooks in operations research and management science:Simulation (pp. 501–534). Amsterdam: Elsevier Science.
Kleijnen, J. P. C., van Beers, W., & van Nieuwenhuyse, I. (2010). Constrainedoptimization in expensive simulation: Novel approach. European Journal ofOperational Research, 202, 164–174.
Law, A. M. (2007). Simulation modeling and analysis (4th ed.). New York: McGraw-Hill.
Lee, L. H., Chew, E. P., Teng, S., & Chen, Y. (2008). Multi-objective simulation-basedevolutionary algorithm for an aircraft spare parts allocation problem. EuropeanJournal of Operational Research, 189, 476–491.
Lee, L. H., Pujowidianto, N. A., Li, L. W., Chen, C. H., & Yap, C. M. (2012). Approximatesimulation budget allocation for selecting the best design in the presence ofstochastic constraints. IEEE Transactions on Automatic Control, 57, 2940–2945.
Li, D., Lee, L. H., & Ho, Y. C. (2002). Constraint ordinal optimization. InformationSciences, 148, 201–220.
Luo, Y., & Lim, E. (2011). Simulation-based optimization over discrete sets withnoisy constraints. In S. Jain, R. R. Creasey, J. Himmelspach, K. P. White, & M. Fu(Eds.), Proceedings of the 2011 winter simulation conference (pp. 4013–4025).Piscataway, NJ: Institute of Electrical and Electronics Engineers.
Michalewicz, Z. (1996). Genetic algorithms + data structures = evolution algorithms(3rd ed.). Berlin: Springer.
Morrice, D. J., & Butler, J. (2006). Ranking and selection with multiple ‘‘targets’’. In L.F. Perrone, F. P. Wieland, J. Liu, B. G. Lawson, D. M. Nicol, & R. M. Fujimoto (Eds.),Proceedings of the 2006 winter simulation conference (pp. 222–230). Piscataway,NJ: Institute of Electrical and Electronics Engineers.
Nazzal, D., Mollaghasemi, M., Hedlund, H., & Bozorgi, A. (2012). Using geneticalgorithms and an indifference-zone ranking and selection procedure undercommon random numbers for simulation optimisation. Journal of Simulation, 6,56–66.
Nelson, B. L., Swann, J., Goldsman, D., & Song, W. (2001). Simple procedures forselecting the best simulated system when the number of alternatives is large.Operations Research, 49, 950–963.
Ólafsson, S. (2006). Metaheuristics. In S. G. Henderson & B. L. Nelson (Eds.),Handbooks in operations research and management science: Simulation(pp. 633–654). Amsterdam: Elsevier Science.
Park, C., & Kim, S. H. (2011). Handling stochastic constraints in discrete optimizationvia simulation. In S. Jain, R. R. Creasey, J. Himmelspach, K. P. White, & M. Fu(Eds.), Proceedings of the 2011 winter simulation conference (pp. 4217–4226).Piscataway, NJ: Institute of Electrical and Electronics Engineers.
Pujowidianto, N. A., Hunter, S. R., Pasupathy, R., Lee, L. H., & Chen, C. H. (2012). Closed-form sampling laws for stochastically constrained simulation optimization onlarge finite sets. In C. Laroque, J. Himmelspach, R. Pasupathy, O. Rose, & A. M.Uhrmacher (Eds.), Proceedings of the 2012 winter simulation conference (pp. 1–10).Piscataway, NJ: Institute of Electrical and Electronics Engineers.
Ray, T., Kang, T., & Chye, S. K. (2000). An evolutionary algorithm for constrainedoptimization. In Whitley, D., Goldberg, D., & Cantú, E. (Eds.), Proceedings of the 2000genetic and evolutionary computing conference, San Francisco, CA (pp. 771–777).
Rinott, Y. (1978). On two-stage selection procedures and related probability-inequalities. Communications in Statistics – Theory and Methods, A7, 799–811.
Runarsson, T. P., & Yao, X. (2000). Stochastic ranking for constrained evolutionaryoptimization. IEEE Transactions on Evolutionary Computation, 4, 284–294.
Szechtman, R., & Yücesan, E. (2008). A new perspective on feasibility determination.In S. J. Mason, R. R. Hill, L. Mönch, O. Rose, T. Jefferson, & J. W. Fowler (Eds.),Proceedings of the 2008 winter simulation conference (pp. 273–280). Piscataway,NJ: Institute of Electrical and Electronics Engineers.
Tsai, S. C. (2013). Rapid screening procedures for zero-one optimization viasimulation. Informs Journal on Computing, 25, 317–331.
Tsai, S. C., & Chu, I. H. (2012). Controlled multistage selection procedures forcomparison with a standard. European Journal of Operational Research, 223,709–721.
Tsai, S. C., & Kuo, C. H. (2012). Screening and selection procedures with controlvariates and correlation induction techniques. Naval Research Logistics, 59,340–361.
Vieira Junior, H., Kienitz, K. H., & Belderrain, M. C. N. (2011). Discrete-valued,stochastic-constrained simulation optimization with COMPASS. In S. Jain, R. R.Creasey, J. Himmelspach, K. P. White, & M. Fu (Eds.), Proceedings of the 2011winter simulation conference (pp. 4191–4200). Piscataway, NJ: Institute ofElectrical and Electronics Engineers.
Xu, J., Nelson, B. L., & Hong, L. J. (2010). Industrial strength COMPASS: Acomprehensive algorithm and software for optimization via simulation. ACMTransactions on Modeling and Computer Simulation, 20, 1–29.
Yu, T. Y., Tsai, C., & Huang, H. T. (2010). Applying simulation optimization to theasset allocation of a property-casualty insurer. European Journal of OperationalResearch, 207, 499–507.