-
A Geocentric Solution to the 3-body Problem 1
A GEOCENTRIC SOLUTION TO THETHREE-BODY PROBLEM
Prepared byGerard Bouw, Ph.D.
Introduction
In 2013 some humanistic, self-professed scientists proposed
that, for the 3-body problem,the theory of geocentricity should
yield a different solution than what is observed. Inanticipation of
that challenge Bob Sungenis invited me to derive a geocentric
solutionwithin the framework of the theory of geocentricity. Our
purpose was to derive a viablegeocentric framework for the 3-body
problem. We were successful and this paper is thefruit of our
labors.
The Approach
The version of the 3-body problem we consider here is, as the
name suggests, of threebodies in mutual orbit about each other.
Classically, the 3-body problem assumes thattwo of the bodies are
massive and the third body’s mass can be regarded as zero.
Unlikemost modern dynamic derivations posted on the web which know
the solutions ahead oftime, the approach in this paper is
completely general and so could be used to locate anyadditional
critical points besides the five Lagrangian points. Geocentrically,
the 3 bodiesare: the sun, the earth, and a third body, of
negligible mass, that appear at rest relative tothose two bodies.
Fundamentally, we are looking to answer this question: “At
whatlocations is the orbital speed of the negligible-mass body zero
with respect to both thesun and earth?” As a point of terminology,
the negligible body is technically called the“infinitesimal mass”
or “the test mass.”
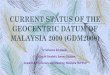
Figure 1 presents the geocentric geometry of the problem. The
earth is located at point Eand the sun is located at point S. The
angular velocity vector, D represents the diurnalrotation of the
firmament about the axis that runs from the center of the earth
through itspoles. The angular velocity vector, A, is inclined at
23.5° to D, which is the angularvelocity of the earth-sun line
about the earth in the course of the year. The geometry issuch that
the sun is located at its southernmost point, namely the first day
of winter, thatis, roughly 21 December. Thus the line from E to S
goes clockwise around the point E asseen from A, with a period of
one year. Likewise, as seen from the tip of D, the entirepage
rotates counterclockwise with a period of one sidereal day (23
hours 56 minutes).
We shall simplify where we can legitimately do so. In an earlier
paper we have shownspecifically for the diurnal (daily) rotation
case that the system holds together; that thefirmament’s
gravitational field, which we call inertia, holds the stellar
universe togethereven though some may think that the orbital speeds
would be immense. But rotation isnot the same as revolution, which
is to say that if the entire universe rotates as one inertial
-
2 A Geocentric Solution to the 3-body Problem
field, the presence of that rotation cannot be felt by the
atomic matter of the universe, orby photons traveling through
it.
We shall shortly demonstrate that neither the daily rotation of
the firmament nor theyearly orbital motion of the sun’s entire
about the earth can disrupt the motions weobserve. When we are
finished with that section, we can simplify our problem to
thatpresented in Figure 4 (pg. 7).
Figure 1: The Geocentric Situation
Derivation Of The Geocentric Equations For A Daily-Rotating
Universe
By definition, physics deals with matter in motion. Mathematics
is the language ofchoice, used by physicists to describe motion.
Usually physicists are well behaved intheir use of math, but at
times, they introduce fudge factors to bridge what theorydemands
and experiment lacks. Even then, the fudging is quite obvious from
the namesgiven the fudge factors such as “guillotine factor,” for
instance. But there are times whenreputations and careers are at
stake and at those times, the fudging becomes quite subtle,even
mean-spirited at times.
-
A Geocentric Solution to the 3-body Problem 3
The mathematical language used to describe the gravitational
forces of orbiting bodies,and the behavior of spinning bodies is a
case in point. When confronted by the mass ofevidence for the
geocentric universe, physicists resort to sleight of hand to keep
the earthin orbit about the sun when all fundamental experimental
results reveal earth to bestanding still in the firmament. In this
case, they multiply one side of the generalizedequation of motion
by the number one. Before multiplying by one, the equation is said
tobe kinematic, describing the accelerations and velocities of the
bodies but not taking themasses of the bodies into consideration.
For instance, consider this equation thatdescribes the velocity, v,
of a body in circular motion with a rotational speed of at
adistance R from the center of the circle:
v= R. (1)This equation is said to be kinematic and even though
it perfectly describes the velocityand behavior of a body’s
rotational and orbital motions, it is said to be unphysical.
Now suppose that we multiply the left-hand side of the equation
by one, namely, by themass, m, divided by itself, i.e., m/m. This
is equivalent to multiplying both sides of theequation by the mass,
m. Our equation (1) now looks as follows:
m v= m R. (2)This is said to be a dynamic description, that is
to say, somehow this equation is more“physical,” more “real,” than
the kinematic equation (1) even though we can obviouslycancel out
the m’s and simplify equation (2) back to equation (1). To hide
this sleight ofhand, equation (2)’s left hand side is replaced by a
single variable, p, called momentum.1
Thus equation (3), which is the same as equation (2) is
rewritten as”p = m R. (3)
Since momentum is a dynamic concept, the mass is hidden and no
physicist will cancelits appearance on the right-hand side of the
equation with its hidden counterpart in p.
But two can play at that game. Let us assume that God created
the firmament with abuilt-in set of reaction rules. These rules
dictate the behaviors of accelerating bodies andthe set of all such
reactions we group together under in the name of inertia.
Deriving the Geocentric Equations From First Principles
As seen from earth, its coordinates determine a star’s location.
Just as our coordinates onearth are specified by longitude and
latitude, so a star’s coordinates are given by its rightascension
and declination. A star’s longitude is specified by its right
ascension and itslatitude is measured by its declination north or
south of the plane of earth’s equator.Since the star’s coordinates
are fixed to the celestial sphere, to model the rotation of
thefirmament—carrying the star with it—we only need the star’s
declination (see Figure 1).
1 Technically, it is more correct to say that p is the angular
momentum, but that is irrelevant to theargument at hand.
-
4 A Geocentric Solution to the 3-body Problem
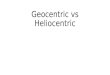
Figure 2: The Geocentric View of the Daily Rotation
The following is a derivation of the dynamical equations for the
universe rotating aboutthe earth in a daily rotation. In the
derivation, we use the following notation:
F is the net gravitational force exerted on the star;a is the
net acceleration experienced by the star in its daily path about
earth;R is the shortest distance from the axis of rotation to the
star;D is the distance from earth to the star;v is the velocity of
the star;m is the star’s mass;
is the declination (celestial latitude) of the star as measured
from the equator; and is the rotation rate of the firmament about
the rotational axis that passes throughthe north and south poles of
earth: imagine it measured in degrees per secondalthough
technically we use radians per second.2
The usual objection against geocentricity is that the earth is
not massive enough to havethe universe “orbit” it once a day. In
reality, neither the mass of the earth nor the mass ofthe star
enter into the force that holds the universe together during its
rotation.Acceleration is defined as a change in velocity per unit
time. We can write this as:
2
2
dt
Rda (4)
2 There are 2 radians in the circumference of a circle, so a
radian is roughly 57 degrees.
-
A Geocentric Solution to the 3-body Problem 5
Here, R is the distance to a moving object and t is time. This
can be rewritten moreexplicitly as:
dt
dR
dt
da (5)
where dR/dt is the velocity, v, of the moving object, the star
in our case. This equationsays, “Acceleration is the rate of change
in velocity.”
But we’re not trying to model the speed and acceleration of an
automobile here but thatof a distant star rotating about the earth
once every 23 hours and 56 minutes. We mustthus add the rotational
velocity (Equation (1)) into the mix. This requires us to
rewriteequation (5) as:
R
dt
dR
dt
da (6)
where is the angular velocity (measured in degrees per second,
for instance) and R isthe distance of the star from the axis of
rotation.
Distributing the derivative (d/dt) through the terms in
parentheses of Equation (6) givesus equation (7):
Rdt
dRR
dt
d
dt
Rda
2
2
2
. (7)
Here the first term on the right-hand side of equation (7) is
any acceleration that may be
imparted to the earth (the central point). The second term,
R
dt
d, is the Euler force,
which is not of interest here since it only kicks in if the
length of the day changessignificantly over the course of a day.
The third term (starting with the 2), is the Coriolisforce and the
last term [R)] is the centrifugal force.
The Coriolis and centrifugal forces dominate the motion of the
sun, planets, and stars in ageocentric system. We shall thus ignore
the Euler and local acceleration terms ofequation (7) and work only
with:
Rva 2 (8)where v is the orbital speed of the star. Since the
firmament rotates and not the earth, thesign of v is in the
opposite direction to the heliocentric system, and is thus
negative. Thev in equation (8) is thus replaced by R .
After expanding v, equation (8) is now:
RRa 2 ;or
Ra . (9)
Distributing the cross-product through the term in parentheses
gives us:
-
6 A Geocentric Solution to the 3-body Problem
RRa . (10)
Now the star is not located on the equator but at declination ,
whence
·R = D sin().
Our final equation for the geocentric system is thus:
sinˆ2 DRa . (11)
Here ̂ is a unit vector pointing along the rotation axis, that
is, in the direction of which is perpendicular to the equator in
general and here in the plane of the star’s circlein Figure 1. This
keeps the acceleration experienced by the star confined to the
star’slatitude, swept out by R and noted as the “Star’s daily path”
in Figure 1.
Let’s Examine Our Results Thus Far
Equation (11) has two components, two vectors. They are pictured
in Figure 2 wherethey are shown as acceleration vectors. To make
them dynamic, multiply each by thestar’s mass. The acceleration
pictured by the sine term is aligned along the rotationvector, ,
and serves to keep the star’s rotationalplane from “falling” up or
down the rotational axis.The second component is the cosine term.
Thatacceleration pulls the star towards the axis ofrotation. If
multiplied by the star’s mass it becomesa centripetal
(non-fictitious) force, meaning that itpulls the star towards the
axis of rotation. The netresult of these two accelerations is to
keep the starin its place in the inertial field of the universe
whichis the gravitational field of the firmament.Of course,
equation (11) is kinematic, not dynamicand we have to show the
geocentric model isdynamically correct. To do that, all we have to
dois to multiply both sides by the star’s mass, m:
sinˆ2 DRmmaF (12)
Although we assumed the body was a star inderiving (12), it
could just as well have been the sun, moon, any planet, artificial
satellite,or star circling the earth’s polar axis. Yet some will
ask, “What about the speed of light?Won’t the distant planets and
stars orbit the earth way above the speed of light?”
The answer is, “No.” The speed of light is determined by the
firmament. It is thefirmament that rotates on the polar axis once a
day and so photons, which are transmittedby the firmament, also
participate in the daily rotation. Light, will also obey the
above
Figure 3: Accelerations (Forces)
-
A Geocentric Solution to the 3-body Problem 7
equations superimposed on its own motion. To object that it
still exceeds the speed oflight we answer that the speed of light
speed limit does not apply for rotation. In thiscase it is
equivalent to claiming that when a supersonic jet flies faster than
the speed ofsound, you could not talk to the person in front of you
because you were flying fasterthan the speed of sound. But the air
in the plane, too, was “flying” faster than the speedof sound, so
you can talk to the person in the seat in front of you because the
sound-bearing medium was carried with you, even as the
light-bearing medium is carried alongwith the sun, moon, and stars
in the daily rotation of the firmament.
Conclusion
We have shown that the physics of the geocentric universe
accounts perfectly for whatwe see and measure of the daily rotation
whether that rotation is of the earth within theuniverse or the
universe around the earth. In the final analysis, proofs based
ondynamical equations are not proofs of anything; nor are they
proofs against the geocentricuniverse.
By the same approach, we could show that the yearly orbital
motion of the sun andplanets can be represented in the geocentric
framework of the firmament. But for thispaper we shall only point
out that every object in the universe obeys equation (12). SinceS,
m, and even the c.m. in Figure 1 will all obey equation (12) for
the rotational case, wecan simplify Figure 1 to Figure 4:
Figure 4: The Simplified Vector Diagram.Here: S is the sun;
E is the earth;m is the infinitesimal mass (a.k.a. the test
mass);c.m. is the center of mass of the local system;r1 is the
vector representing the distance from sun to the c.m. (which is
inside the
sun);r2 is the vector representing the distance of the center of
mass from the earth;r is the distance of the test mass m from the
c.m.
-
8 A Geocentric Solution to the 3-body Problem
There remains for us to derive the generalized equations of
motion describing the path ofthe test mass, m. Then we need to
solve the generalized equations for locations wherem’s velocity is
zero relative to both sun and earth.
Equations of Motion for the Infinitesimal Body
As a result of deriving Figure 4 the way we did by using the
geocentric equations ofdiurnal forces acting on distant masses, we
can assume that the two finite masses revolvein circles around
their common center of mass. Since the test mass is
assumedinfinitesimally small, it does not change the location of
the earth-sun center of mass (i.e.,the barycenter).
To further simplify our approach, let us assume the unit of mass
such that the sum of the3 masses = 1. This allows us to set the
mass of one body equal to 1 - and the otherequal to. In our case,
is the mass of the earth and 1 - is the mass of the sun. Herewe
select the notation such that is less than or equal to ½.
Let the unit of length be the earth-sun distance, that is, the
distance from E to S = 1.Likewise, we select the unit of time to be
such that k2 = 1, where k is such that
Fksm 2 .
Set the origin of our coordinate system at the center of mass
and let the -plane bedetermined by their mutual rotation (i.e., the
ecliptic plane). Set the coordinates of thebodies so that 1 - and
and the test mass be (and (respectively, and
221211 r
222222 r
Then the differential equations of motion for m are:
.1
'1
'1
32
31
2
2
32
2
31
1
2
2
32
2
31
1
2
2
rrdt
d
rrdt
d
rrdt
d
(13)
The choice of units makes the mean angular motion of the finite
bodies be:
-
A Geocentric Solution to the 3-body Problem 9
2
3
1
a
k
= 1, (14)
where a = r1 + r2 1.
If we now change coordinate systems so that the origin is still
at the c.m. and the rotationis still in the -plane in the direction
that the bodies move with uniform angular velocityunity see (14).
The coordinates of the new system are defined by the equations:
z
tytx
tytx
,cossin
,sincos
(15)
and similar equations for letters with subscripts 1 and 2.
Taking the second derivatives of (15) we obtain and substituting
into equation (13)yields:
.1
,cos1sin1
cos2sin2
,sin1cos1
sin2cos2
32
31
2
2
32
2
31
1
32
2
31
1
2
2
2
2
32
2
31
1
32
2
31
1
2
2
2
2
r
z
r
z
dt
zd
tr
yy
r
yyt
r
xx
r
xx
tydt
dx
dt
ydtx
dt
dy
dt
xd
tr
yy
r
yyt
r
xx
r
xx
tydt
dx
dt
ydtx
dt
dy
dt
xd
(16)
Multiplying the first two equations of the three by cos t and
sin t respectively, and then by–sin t and cos t, and adding; the
results are:
-
10 A Geocentric Solution to the 3-body Problem
.1
,12
,12
32
31
2
2
32
2
31
1
2
2
32
2
31
1
2
2
r
z
r
z
dt
zd
r
yy
r
yyy
dt
dx
dt
yd
r
xx
r
xxx
dt
dy
dt
xd
Assuming the x-axis as fixed to the centers of the finite bodies
(earth and sun, forinstance), then y1=0 and y2=0 and the equations
become:
.1
,12
,12
32
31
2
2
32
31
2
2
32
2
31
1
2
2
r
z
r
z
dt
zd
r
y
r
yy
dt
dx
dt
yd
r
xx
r
xxx
dt
dy
dt
xd
(17)
We now have the differential equations describing the motion of
the test mass, m withrespect to axes rotating in such a way that
the finite bodies always lie on the x-axis(earth-sun). The unique
property of these expressions is that they do not explicitlyinclude
time. When we started our analysis in equations (13); werefunctions
of time.
Equations 17 can be integrated by Jacobi’s Integral if we
let
21
22 1
2
1
rryxU
; (18)
so that equations 17 can be rewritten as:
.
,2
,2
2
2
2
2
2
2
z
U
dt
zd
y
U
dt
dx
dt
yd
x
U
dt
dy
dt
xd
(19)
Multiplying these equations by 2(dx/dt), 2(dy/dt) and 2(dz/dt)
respectively, and thensumming, the resulting equation can be
integrated because U is a function of x, y, and zalone. Doing so
gives:
-
A Geocentric Solution to the 3-body Problem 11
CUvdt
dz
dt
dy
dt
dx
22
222
where C is the constant of integration.
By definition this gives
C
rryx
dt
dz
dt
dy
dt
dx
21
22
222
21
2
(20)
Since our solution to the problem is of 6th order instead of the
usual approach which is of5th order, we need five more equations to
solve the problem. If we confine the motion ofthe test mass to the
xy-plane, we only need three more equations. Finding one
equation,we can find the remaining two by Jacobi’s last multiplier;
so we actually need to find onemore equation.
Equation (20) is a relation between the square of the velocity
and the coordinates of mreferenced by the rotating axes. The
constant C can be found by initial conditions, so(20) specifies the
velocity of the test mass at all points of the rotating space;
andconversely, given a velocity, (20) gives the locus of points
where only m can be. Inparticular, if the velocity is set to zero
in (20), it will define the surfaces at which thevelocity is zero.
On the one side of these surfaces, the velocity will be real and on
theother side, imaginary. We can regard this as saying that it is
possible for the body tomove on one side of the surface and
impossible to move on the other side.
The equation of the zero surfaces of relative velocity is:
.
,
,21
2
222
22
222
11
21
22
zyxxr
zyxxr
Crr
yx
(21)
Since only the squares of y and z occur, the surfaces defined by
(21) are symmetricalwith respect to the xy and xz-planes, and, for
the case that = 0.5, with respect to the yz-plane also. The
surfaces for 0.5 can be regarded as deformations of those for =
0.5.
From the geometry of z it follows that a line parallel to the
z-axis pierces the surfaces intwo or none real points. Also, the
surfaces are contained within a cylinder whose axis is
parallel to the z-axis and whose radius is C , to which certain
folds are asymptotic at
z2 = ; for, as z2 increases, the equation approaches as a
limit:
x2 + y2 = C.
-
12 A Geocentric Solution to the 3-body Problem
The equation of the curves of intersection of the surfaces with
the xy-plane is obtainableby setting z = 0 in equation (21):
.
212
22
222
1
22 Cyxxyxx
yx
(22)
There are two cases we can use to approximate (22).
Case 1: x and y are large.If x and y are large, the 3rd and 4th
terms in (22) are negligible and the equation canbe written as:
Cyx 22
where = the sum of terms 3 and 4, which are negligible in this
case. This is the
equation of a circle whose radius is C . The larger the value of
C, the greaterthe values of x and y which satisfy the equation. The
smaller , the more circular thecurve and the more nearly it reaches
the asymptotic cylinder.
Case 2: x and y are small.For small values of x and y, the first
two terms of equation (22) become relativelyunimportant and the
equation may be rewritten as:
Crr 21
1
These curves plot the locus of points of equal potential energy
for the two centers offorce, 1- and . For large values of C they
consist of closed ovals around each ofthe bodies E and S. For small
values of C these ovals unite between the bodiesforming a dumbbell
shaped figure in which the ends are of different size exceptwhen =
0.5. And for still smaller values of C, the handle of the dumbbell
enlargesuntil the figure becomes an oval enclosing both of the
bodies.
It thus follows that the approximate forms of the curves in
which the surfaces intersectthe xy-plane are given in Figure 5. The
curves C1, C2, C3, C4, and C5 are in order ofdecreasing values of
the constant C. (Figures 5, 6, and 7 were not computed
numericallybut are intended to show qualitatively the
characteristics of the curves.)
-
A Geocentric Solution to the 3-body Problem 13
Figure 5: xy-Plane Contours
-
14 A Geocentric Solution to the 3-body Problem
Figure 6: xz-Plane Contours
-
A Geocentric Solution to the 3-body Problem 15
Figure 7: yz-Plane Contours
-
16 A Geocentric Solution to the 3-body Problem
The equation of the curves of intersection of the surfaces and
the xz-plane is obtained bysetting y = 0 in equation (21):
C
zxxzxxx
22
222
1
2 212 (23)
Again we have two cases:
Case 1: large values of x and zFor large values of x and z the
2nd and 3rd terms are negligible and may be written as:
x2 = C -
which is the equation of a symmetrical pair of straight lines
parallel to the z-axis.The larger the value of C, the larger the
value of x which, for a given value of z,satisfies the equation
and, therefore, the smaller is . Hence, the larger C, the closerthe
lines are to the asymptotic cylinder.
Case 2: small x and z.For small values of x and z, the first
term in (23) becomes negligible and theequation can be written:
2
1
21
C
rr
Hence the forms of the curves in the xz-plane are qualitatively
like those in Figure 6.Again, C1, …, C5 are in order of decreasing
values of the integration constant, C.
We can likewise compute the curves for the yz=plane by setting
x=0 in equation (21).
Czyxzyx
y
2222
2221
2 212 (24)
Case 1: y, z largeFollowing the same reasoning as done for the
earlier cases, for large y and z, we canwrite
y2 = C - ,which is near the asymptotic cylinder.
Case 2: small y and zFor small values of y and z, (24) may be
written as
C
r1
12
-
A Geocentric Solution to the 3-body Problem 17
which is the equation of a circle which becomes larger as C
decreases. Hence theforms of the curves in the yz-plane are
qualitatively as given in Figure 7.
From these 3 figures it is easy to infer their forms for the
different values of theintegration constant. They may be roughly
described as consisting of, for large values ofC, a closed fold
approximately spherical in form around each of the finite bodies,
and ofcurtains hanging from the asymptotic cylinder symmetrically
with respect to the xy-plane. For smaller values of C, the folds
expand and coalesce (Figure 5, curve C3); forstill smaller values
if C the united folds coalesce with the curtains, the first points
ofcntact being in every case in the xy-plane; and for sufficiently
small values of C thesurfaces consist of two parts symmetrical with
respect to the xy-plane but not intersectingit. (Figure 6, curve C5
and Figure 7 curve C6.)
Now that we know the forms of the surfaces, we have to find
where the space motion isreal and where it is imaginary.
The square of the velocity is:
C
rryxv
21
222 212
Assume C is so large that the ovals and curtains all are
separate. The motion will be realin those portions of relative
space for which the right member of the velocity equation
ispositive. If it is positive in one point in a closed fold, it is
positive in every other pointwithin it because the function changes
sign only at a surface of zero relative velocity.
From the velocity equation that x and y can be taken so large
that the right member willbe positive, regardless of how great C
may be. Therefore, the motion is real outside thecurtains. It is
also clear that a point can be chosen so near to either 1- or
(earth orsun), that is, either r1 or r2 may be taken so small that
the right expression will be positivehowever great C may be.
Therefore, the motion is real within the folds around the
finitebodies.
If the value of C is so large that the folds around the finite
bodies were closed, and if theinfinitesimal body should be within
one of these folds at the origin of time, it wouldalways remain
there since it could not cross a surface of zero velocity.
If the sun’s motion about the earth is taken to be circular, and
the mass of the mooninfinitesimal, we find that the contour of C3,
is 40 times larger than the orbit of the moon.This is so large that
the fold around it and the earth is closed with the moon within
it.Therefore, the moon cannot escape earth’s gravity.
Points on the surfaces can be found by determining the curves in
the xy-plane and thenfinding by approximations the values of z
which satisfy equation 20. Specifically, thecurves in the xy-plane
are of interest because the first points of contact, as the
various
-
18 A Geocentric Solution to the 3-body Problem
folds coalesce, occur in this plane, and, indeed, on the x-axis
as are evident from thesymmetries of the surfaces.
The equation of the curves in the xy-plane is:
C
yxxyxxyx
22
222
1
22 212
If this equation is rationalized and cleared of fractions the
result is a polynomial of the16th degree in x and y. When the value
of one of the variables is taken arbitrarily thecorresponding
values of the other can be found.
This problem presents great practical difficulties because of
the high degree of theequation (16th order), and these difficulties
are exacerbated by the presence of extraneous(imaginary) solutions
which are introduced by the process of rationalization.Transforming
to polar coordinates can significantly reduce the degree of the
equation.That is, points on the curves can be defined by giving
their distances from two fixedpoints on the x-axis. We could not
use this method if the curves were not symmetricalwith respect to
the axis on which the poles lie.
Let the centers of the bodies 1- and be taken as poles; the
distances from these polesare r1 and r2 respectively. To complete
the transformation it is necessary to express x
2+y2
in terms of these quantities.
Figure 8: Transformed x-y axes
Let P be a point on one of the curves; then OA = x, AP=y, and,
since O is the center of
mass of 1- and , 1O , and 1O .
It follows that:
222122
12 2 xxrxry
222222
22 1121 xxrxry .
On eliminating the first power of x from these equations and
solving for x2 + y2, we findthat:
-
A Geocentric Solution to the 3-body Problem 19
.11 222
122 rryx
As a consequence of this equation, equation (22) becomes:
CCr
rr
r
1
221
2
22
1
21 (25)
If an arbitrary value of r2 is assumed, r1 can be computed from
this equation: the points ofintersection of the circles around 1-
and as centers, with the computed and assumedvalues respectively of
r1 and r2 as radii will be points on the curves. As a result, we
maylet equation (25) be written in the form:
.2
,2
11
,0
2
22
13
1
b
rr
Ca
barr
(26)
Since b=2 is positive, there is at least one real negative root
of the first part of (26)whatever value a may have. But the only
value of r1, which has any meaning in thisproblem, is real and
positive; hence, the condition for real positive roots must
beconsidered.
It follows from (25) that C is always greater than
2
22
2
rr for all real, positive values
of r1 and r2; therefore, a is always negative.
From the Theory of Equations we know that a cubic equation of
this form (top line of(26)) has three distinct real roots if
0427 32 ab ; or, since b=2, if
a + 3 < 0. (27)
Given this inequality, we can find the cubic roots as:
-
20 A Geocentric Solution to the 3-body Problem
,27
2sin
3a
b
2
,
.3
60sin3
2
,3
60sin3
2
,3
sin3
2
13
12
11
ar
ar
ar
(28)
where r11, r12, r13 are the three roots of the cubic.
The limit of the inequality (27), or, in terms of he original
quantities, is,
.2
,13
023
2
b
Ca
brar
(29)
The solution of this equation gives the extreme values of r2 for
which (26) has real roots.Therefore, in actual computation equation
(29) should first be solved for r21, and r22. Thevalues of r2 to be
substituted in (26) should be chosen at convenient intervals
betweenthese roots.
Equation (29) will not have real, positive roots for all values
of a ,́ the condition for real,positive roots being:
03 a ;
the limiting value of which is, in the original quantities,
,3
13
C
whence C´ = 3.
Therefore, C´ must be equal to, or greater than, 3 in order that
the curves shall have realpoints in the xy-plane. For C´=3, the
curves are just vanishing from the xy-plane and itfollows that
equation (25) is satisfied by r1 = 1, and r2 = 1; i.e., the
surfaces vanish fromthe xy-plane at the points which form
equilateral triangles with 1- and .
From the overall form of the surfaces that the pairs of points
which appear as C decreasesare all in the xy-plane. Therefore, it
is sufficient here to consider the equation of thecurves in the
xy-plane.
-
A Geocentric Solution to the 3-body Problem 21
There are three pairs of points on the x-axis which appear when
the ovals around thefinite bodies touch each other and when they
touch the exterior curve enclosing the bothof them. Two more appear
as the surfaces vanish form the xy-plane, at the two pointsmaking
equilateral triangles with the finite bodies. These points are
critical points oftheir respective contours and they are connected
with important dynamical properties ofthe system.
Let the equation of a contour be written as:
0212,21
22
Crr
yxyxF
. (30)
Differentiating we get the conditions for the twin pairs:
012
1
012
1
32
31
32
2
31
1
r
y
r
yy
y
F
r
xx
r
xxx
x
F
(31)
The left members of these equations are the same as the right
members of equations (17)for z=0. The terms to the left of the
equal signs in (31) are proportional to the directioncosines of the
normal at all ordinary points of the curves; and, since dx/dt and
dy/dt arezero at the surfaces of zero velocity, it follows from
(17) that the directions ofacceleration, i.e., the lines of
effective force are orthogonal to he surfaces of zerovelocity.
Thus, if the infinitesimal body is placed on a surface of zero
relative velocity it will startmoving in the direction of the
normal. But at the twin points, the sense (direction andamount) of
the normal becomes ambiguous. Hence, it might be conclude that if
theinfinitesimal body were placed at one of these points it would
remain relatively at rest.
The conditions imposed by (30) and (31) require that2
2
dt
dxand
2
2
dt
dy, which are the
accelerations in the x and y direction respectably, must vanish
as per (17). The result ofthe latter constraint on accelerations is
that if the infinitesimal body, m, is placed at a twinpoint with
zero velocity, its coordinates will identically fulfill the
differential equations ofmotion and it will remain forever at rest
with respect to sun and earth unless an externalforce is brought to
bear upon it.
Consider constraints (31); the second of which is fulfilled if
we set y = 0. The twinpoints on the x-axis and the linear solutions
of the problem statement are given by theconditions:
-
22 A Geocentric Solution to the 3-body Problem
.0
,0
,012
32
2
2
2
32
1
1
z
y
xx
xx
xx
xxx
(32)
The first term of the first equation in (32), when taken as a
function of x, is positive in thelimit as x goes to +. It is
negative for x = x2 - where is a very small positivequantity. It is
positive for x = x2 - ; and it is negative for x = x1 + It is
positive forx=x1-; and it is negative for x=-. Therefore there are
three positions along the linethrough the finite bodies at which
the infinitesimal body can remain when placed there.
We now have three cases:Case 1:
Let the distance from to the double point on the x-axis between
+ and x2 berepresented by . Then:
x-x2=x-x1=r1=1+
x=1-
Therefore, after clearing fractions, the first equation of (32)
then becomes:
02233 2345 (33)
This 5th order equation has one change of signs in its
coefficients, and thus has onlyone real positive root. The value of
this root depends upon , the mass of the earth.
Consider the left member of the equation as a function of and
For =0, theequation becomes:
.03323
This has 3 roots: one of them is zero, and the other two are
imaginary.
It follows that for 0 but sufficiently small, 3 roots of
equation (33) can be
expressed as a power series in 31
. One root will be real, the others complex.Therefore the real
root has the form:
...33
33
2
23
1
1 aaa
Substituting this into equation (33) and setting the result to
zero, the coefficients (a1,a2, a3, …) of corresponding powers
of
1/3, we find that:
-
A Geocentric Solution to the 3-body Problem 23
,3
332
1 a9
331
2 a , ,27
13 a …
And so:
.1
...39
1
33
1
3
1
3
3
3
2
3
1
2
r
r (34)
The corresponding value of C´ is found by substituting these
values of r1 and r2 inequation (25).
Case 2:Let the distance from to the twin point on the x-axis
between x2 and x1 berepresented by . Then x - x2 = -, x - x1 = r1 =
1 - , x = (1 - ) -. Therefore, thefirst of equation (32)
becomes:
02233 2345
On solving as in Case 1, the values of r2 and r1 are
.1
...39
1
33
1
3
1
3
3
3
2
3
1
2
r
r (35)
C´ is found by substituting r1 and r2 into (25).
Case 3:Let the distance form 1- to the double point on the
x-axis between x1 and - berepresented by 1-. Then:
1
1
2
1
2
x
xx
xx
and the first equation of (32) becomes
07141213246197 2345 (36)
If =0, which is to say that both m and the lesser of the two
bodies’ masses isnegligible, we obtain
01224197 2345
-
24 A Geocentric Solution to the 3-body Problem
which has only one root, =0. Therefore, can be expressed as a
power series in which converges for sufficiently small values of
this parameter and vanishes with itwhen = 0. This root has the
form:
...443
32
21 cccc
Substituting the expression for into (36) and equating to zero
the coefficients of thevarious powers of , we find that:
,12
71 c 02 c , 4
2
312
723c , …
Hence
21
,1
...12
723
12
7
12
1
3
4
2
rr
r (37)
It’s C´ can be found by substituting into equation (25).
To find the twin points not on the x-axis, we again turn to
equation (31). They, or anytwo independent functions of them,
define the twin points. Since y is distinct from zero,we may divide
it into the second equation, which yields:
.01
13
23
1
rr
Multiplying this equation by x - x2 and x - x1, and subtracting
the products separatelyfrom the first equation of (31) gives:
0
0
01
32
211
31
122
z
r
xxx
r
xxx
But, since 12x , 1x , and 112 xx ; we conclude:
-
A Geocentric Solution to the 3-body Problem 25
0
01
1
01
1
32
31
z
r
r
The only real solutions are 121 rr so these points form
equilateral triangles with the
two finite bodies, whatever their masses may be. Since z = 0,
these points—calledTrojans—are located where the surfaces vanish
from the xy-plane.
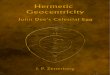
Figure 9 plots the solutions on the xy-plane.
Figure 9: The Five Lagrange Points Plotted on the xy-plane
It is clear from the presence of the asymptotic cylinders that
many other critical pointshave to exist. Such a potential candidate
would look like the C6 contours on the y-axis ofFigure 7, which
coincide with the L4 and L5 points.
In any case, we have taken the long way around to demonstrate
that a geocentricderivation follows from the dynamic explanation of
the geocentric system. Indeed, theso-called “fictitious forces” are
brought into play because a geocentric system isconsidered
“fictional.” Nevertheless, in a geocentric coordinate system they
come intoplay because they are real, gravitational forces. Dynamic
derivations lament the need forinvoking the fictitious forces in
order to represent their Lagrange points derivations.
-
26 A Geocentric Solution to the 3-body Problem
THE LAGRANGE POINTS: A MODERN APPROACH3
The derivation we have applied in the previous section is a
rigorous one derived from thedefinition of force and geometry. In
this section, we use another approach which is basedon Newtonian
gravitational force. We again start with the same initial
conditions as wedid with Figure 4, here presented as Figure 10.
Figure 10: The restricted 3-body problem
There are five equilibrium points to be found in the vicinity of
two orbiting masses. Theyare called Lagrange Points in honor of the
French-Italian mathematician JosephLagrange, who discovered them
while studying the restricted three-body problem. Theterm
“restricted” refers to the condition that two of the masses are
very much heavierthan the third. Today we know that the full
three-body problem is chaotic, and so cannotbe solved in closed
form. Therefore, Lagrange had good reason to make
someapproximations. Moreover, there are many examples in our solar
system that can beaccurately described by the restricted three-body
problem.
The procedure for finding the Lagrange points is
straightforward: We seek solutions tothe equations of motion which
maintain a constant separation between the three bodies.If M1 and
M2 are two masses, and 1r
and 2r
are their respective position, then the total
force exerted on a third mass m, at a position r
, will be
232
213
1
1 )( rrrr
mGMrr
rr
mGMF
(38)
3 Source: Neil J. Cornish, & Jeremy
Goodman,http://www.physics.montana.edu/faculty/comish/lagrange.pdf
-
A Geocentric Solution to the 3-body Problem 27
The catch is that both 1r
and 2r
are functions of time since M1 and M2 are orbiting each
other. Undaunted, one may proceed and insert the orbital
solution for 1r
(t) and 2r
(t)
(obtained by solving the two-body problem for M1 and M2) and
look for solutions to theequation of motion
2
2
dt
trdmtF
, (39)
that keep the relative positions of the three bodies fixed. It
is these stationary4 solutionsthat are known as Lagrange
points.
The easiest way to find the stationary solutions is to adopt a
co-rotating frame ofreference in which the two large masses hold
fixed positions. The new frame ofreference has its origin at the
center of mass, and an angular frequency given byKepler’s law:
2132 MMGR (40)
Here R is the distance between the two masses [earth and sun
—GB]. The only drawbackof using a non-inertial frame of reference
is that we have to append various pseudo-forces to the equation of
motion.5 [Emphasis & footnote added —GB.] The effective
force in a frame rotating with angular velocity
is related to the inertial force
F
according to the transformation
rmdt
rdmFF
2 . (41)
The first “correction” is the Coriolis force and the second is
the centrifugal force. Theeffective force can be derived from the
generalized potential
rrrvUU
2
1, (42)
as the general gradient
. Udt
dUF vr
(43)
The velocity dependent terms in the effective potential do not
influence the positions ofthe equilibrium points, but they are
crucial in determining the dynamical stability of
4 I.e., stationary relative to both the earth and the sun, this
is clearly geostatic, as per the theory ofGeocentricity.5 This
refers to the so-called fictitious forces which in a geocentric
framework are real gravitational forces.In short, this statement
says that in a geostatic framework these forces cannot be dismissed
as fictitioussince they are necessary to obtain the correct
equations.
-
28 A Geocentric Solution to the 3-body Problem
motion about the equilibrium points. A plot of U with v
=0, M1 = 10, M2=1 and R = 10is shown in Figure 11. The extrema
of the generalized potential are labeled L1 throughL5.
Figure 11: A contour plot of the generalized potential
Choosing a set of Cartesian coordinates originating from the
center of the masses with thez-axis aligned with the angular
velocity, we have
iRr
iRr
jtyitxr
k
ˆ
ˆ
ˆ)(ˆ
2
1
(44)
where
,21
2
MM
M
21
1
MM
M
. (45)
-
A Geocentric Solution to the 3-body Problem 29
To find the static equilibrium points we set the velocity dtrdv
/
to zero and seek
solutions to the equation 0
F , where
j
yRx
yR
yRx
yRy
iyRx
RRx
yRx
RRxxF
ˆ
ˆ
2/322
3
2/322
32
2/322
3
2/322
32
(46)
Here the mass m has been set equal to unity without loss of
generality. The brute-forceapproach for finding the equilibrium
points would be to set the magnitude of each forcecomponent to
zero, and solve the resulting set of coupled, fourteenth order
equations for xand y. A more promising approach is to think about
the problem physically, and use thesymmetries of the system to
guide us to the answer [which is what we did in the firstsection
—GB].
Since the system is reflection-symmetric about the x-axis, the y
component of the forcemust vanish along this line. Setting y = 0
and writing x=R(u+) (so that u measures thedistance from M2 in
units of R), the condition for the force to vanish along the
x-axisreduces to finding solutions to the three fifth-order
equations.
,212331 43210003212 uuussussuuusu (47)
where s0 is the sign(u) and s1 is the sign(u+1). The three cases
we need to solve have(s0,s1) equal to (-1,1), (1,1), and (-1,-1).
The case (1,-1) cannot occur. In each case thereis one real root to
the quintic equation, giving us the positions of the first three
Lagrangepoints. We are unable to find closed-form solutions to
equation (47) for general values of
-
30 A Geocentric Solution to the 3-body Problem
Identifying the remaining two Lagrange points requires a little
more thought. We need tobalance the centrifugal force, which acts
in a direction radially outward from the center ofmass, with the
gravitational force exerted by the two masses. Clearly, force
balance inthe direction perpendicular to centrifugal force will
only involve gravitational forces.This suggests that we should
resolve the force into directions parallel and perpendicular
to r
. The appropriate projection vectors are jyix ˆˆ and jxiy ˆˆ .
The perpendicular
projection yields
.
113/2223/222
32
yRxyRxRyF
(49)
Setting 0
F and y 0 tells us that the equilibrium points must be
equidistant from
the two masses. Using this fact, the parallel projection
simplifies to read
F||
2/3223
222 11
yRxRR
yx
(50)
Demanding that the parallel component of the force vanish leads
to the condition that theequilibrium points are at a distance R
from each mass. In other words, L4 is situated atthe vertex of an
equilateral triangle, with the two masses forming the other
vertices. L5 isobtained by mirror reflection of L4 about the
x-axis. Explicitly, the fourth and fifthLagrange points have
coordinates
RMM
MMRL
RMM
MMRL
2
3,
2:
,2
3,
2:
21
215
21
214
. (51)
Interestingly, the last two Lagrange points are stable because
any deflecting of a particleinvokes a Coriolis force that brings it
back to the point.
Since the only reason why the center of mass of the earth-sun
balance was used only tosimplify the derivations, the earth could
just as well have been taken as the center:therefore, we expect no
difference will be discovered for these points by
anygeocentrically-based coordinate system. The rule that it is
“six-to-one, half-dozen of theother” when it comes to mathematical
or physical proofs or disproof of heliocentric andgeocentric
physics remains steadfastly true.