Embed Size (px)
Citation preview

Geographic Routing in Clustered Multi-layer Vehicular AdHoc Networks for Load Balancing Purposes
Di Wu 77241953Donald Bren School of ICS, University of California, Irvine, USA
Abstract— To improve the quality of wireless communica-tion and extend the range of applications in Vehicular AdHoc Network (VANET), a clustered multi-layer hybrid networkstructure is proposed by the combination of Wireless MeshNetwork (WMN) and Ad Hoc Network. Making use of locationinformation, congestion monitoring and routing switch, we designa geographic routing in VANET for load balancing purposes. Thehidden terminal problem has been solved by transmitting datain the forwarding node set. An opportunistic routing algorithmis applied when the network connectivity is poor. Based onthe routing switch mechanism for load balancing, unicast andmulticast can be achieved to ensure the Quality of Service(QoS) under various network connectivity and load scenarios.Simulation results show that the proposed algorithm can reducethe transmission latency and network packet loss rate, andtherefore is more suitable for hybrid VANET architecture.
I. INTRODUCTION
Vehicular Ad Hoc Network (VANET) [12] is an emergingnew technology to intergrate the capabilities of new generationwireless networks to achieve intelligent inter-vehicle and road-vehicle communications. Intelligent Transportation Systems(ITS) is the major application of VANET. ITS includes avariety of applications such as co-operative traffic monitoring,control of traffic flows, blind crossing, prevention of collisions,nearby information services, and real-time detour routes com-putation. VANET can also be used to provide comfort applica-tions, including weather information, gas station or restaurantlocations, mobile e-commerce, infotainment applications, andinteractive communications such as Internet access, musicdownloads, and content delivery.
VANET is distinguished from other kinds of Mobile AdHoc Networks (MANET) due to high mobility, rapid changedtopology and various communications environments, therefore,existing routing protocols developed for MANET is highlyinappropriate for VANET. Since VANET is characterized bycommunication among highly dynamic and mobile nodes, de-veloping an efficient multi-hop routing protocol that supportsthe data communication to a wide range of applications isa challenging problem. Existing protocols(i.e. AODV [17],DSR [9]) do not perform well as a result of their routeinstability in vehicular environment. For these protocols, theoverhead of route repairs significantly increases when thetraffic is high, leading to high transmission delay and lowdelivery ratio.
We attempt to develop a more efficient routing protocolin VANET for load balancing purposes in the paper. Ge-ographic routing has proven to be well suited for highly
dynamic environment such as VANET, due to its simplicityand efficiency. With the help of GPS devices, vehicle caneasily obtain its position for location based application. Loadbalancing mechanism is an effecitve way to eliminate networkbottlenecks, expand network bandwidth, increase networkthroughput, enhance network data processing capabilities, andimprove network flexibility and availability. However, due toa lack of backbone nodes and a global dynamic networkinformation, it is difficult to make a good judge on the networkload in VANET.
Fig. 1. The Hybrid VANET Architecture in Urban Scenario.
The architecture of VANETs falls within three categories:pure cellular/WLAN, pure ad hoc, and hybrid. In the pa-per, we consider the combination of Wireless Mesh Net-work (WMN) [2] and Ad Hoc as the communication basisfor VANET applications. Figure 1 demonstrates the hybridVANET architecture in urban scenario. Mesh routers areserved as the backbone nodes to assist VANET communica-tions.
We define the mesh router as AR (area role) in our paper,and will develop a geographic routing in the hybrid VANETfor load balancing purposes, namley Geographic Greedy LoadBalancing Routing (GGLR). The AR node is deployed as thebackbone of VANET, which makes VANET be regionalizedand hierarchical. It enhances the stability of the network andfacilitates an implementation of the network load balancing.We also introduce a congestion control of AR node and abypassing mechanism of vehicle node. Both of these ensureeffective load balancing. In our algorithm, a data packet isforwarded in the form of forwarding set carrying the node ID

in order to prevent the ”hidden terminal” problem. When thenetwork connectivity is poor, it switches to an opportunisticrouting mode to guarantee the quality of service to themaximum extent in VANET environments.
The rest of this paper is organized as follows. Section IIintroduces related work. Section III presents the protocoldetails of GGLR, including the forwarding set, inter-vehicleand vehicle-AR communications, opportunistic routing mode,and routing switch schemes. Section IV evaluates GGLR usingsimulations in terms of network end-to-end delay and pakectdelivery ratio in contrast to other ad hoc routing protocols.Section V concludes our paper.
II. RELATED WORK
Node movement in VANET is usually restricted in just bi-directional movements constrained along roads and streets. Sorouting strategies that use geographical location informationobtained from street maps, traffic models or even more preva-lent navigational systems on-board are practical and makesense. This fact receives support from a number of studies thatcompare the performance of topology-based routing againstpostion-based routing strategies in urban as well highwaytraffic scenarios [6]. Therefore, geographic routing has beenidentified as a more promising routing paradigm for VANETs.
Geographic routing protocol, which always chooses thenext hop closer to the destination, is efficient for the datadelivery. Many protocols, such as GSR [4] and GPSR [10],are developed for MANET. However, they can not be ap-plied in usually disconnected vehicular networks. Therefore,some geographic routing protocols are designed for VANETspecifically. Naumove et al. [14] improved GPSR performancein VANET with the Advanced Greedy Forwarding (AGF)algorithm and Preferred Group Broadcasting Algorithm(PGB).Another modification to GPSR, called GPCR, was proposedin [13]. In GPCR, packet is forwarded following a junctionnode. However, it is hard to determine the junction node in adynamic urban environment. Lee et al. [11] proposed GpsrJ+,which improves GPCR in the packet delivery ratio and thehop count used in the perimeter mode. In [15], Naumove andGross developed a protocol, called Context-Aware Routing(CAR). CAR is based on PGB and AGF and adapts to currentconditions to find a route with sufficient connectivity so asto maximize the chance of successful delivery. Chen et al. [5]proposed a diagonal-intersection-based routing (DIR) protocol,which is an enhancement to CAR. DIR can auto-adjust a sub-path with low packet delay. Jerbi et al. [8] proposed GyTAR, inwhich data packets are forwarded to the destinations throughthe dynamic and in-sequence selection of intersections. Dataforwarding between intersections uses an improved greedycarry-and-forward scheme. GyTAR performs better in termsof throughput, delay, and routing overhead.
III. GGLR: GEOGRAPHIC GREEDY LOAD BALANCINGROUTING
Although there are some VANET routing algorithms inliteratues, there are rarly routing design proposed to consider
hybrid VANET scenarios and load balancing issues. In thissection, we will describe our network model and services,forwarding set, routing between ARs, and story-carry-forwardrouting in GGLR.
A. Network ModelWireless mesh networks provide a cost-effective and
performance-adaptive networking paradigm to deliver ad hocand last-mile Internet access services. WMNs based on IEEE802.11 standards, also known as WiFi, have attracted specialinterests due to its simplicity of channel access control func-tions, low unit cost, flexibility for reconfigurations and wideacceptance in both end-users and research communities. Inthe paper, we introduce WMN into VANET, where AR nodeplays a role of the backbone of VANET, and vehicle node, asa client, is a VAENT user.
As shown in Figure 2, the layout of AR nodes make VANETas a clustered multi-layer network, which enhances the net-work scalability and stability. AR node can communicate witheach other and the Internet gateway. As the backbone node ofVANET, AR node makes it easy to ensure load balancing.A vehicle node can communicate with AR node and othervehicles.
A R A R
A R A R
I N T E R N E T
Fig. 2. Clustered Multi-layer Network Structure.
In our model, we assume each node knows enough locationinformation of itself and its neighbors. We follow the protocolmodel discussed in [7], and model the effective ranges of radiocommunications in three categories, namely the transmissionrange Rtx, the carrier sensing range Rcs and interference rangeRi. The carrier sensing range Rcs is an adjustable parameterin the physical layer modules, and is usually set to 2 to 2.78times Rtx [18]. Therefore, the two-hop distance in VANETsis a good approximation of the carrier sensing range, and nodeactivation scheduling usually requires all neighbors of a nodewithin two hops be silent when the node transmits.
B. Geograplic-based Greedy and Load-Balance RoutingIt is a great challenge to determine the routing strategy
in VANET due to the trasmission requirement of large mul-timedia and voice data. To satisfy the inter-vehicle ad hoc

communication, we have to consider the different networkconnectivities to guarantee less packet transmission delay.Meanwhile, when vehicles use ARs to transmit, we haveto consider the load balancing on each AR to decrease thepacket congestion and provide efficient data processing. Wewill illustrate GGLR schemes in details in the section.
1) The Forwarding Set: A vehicle periodically broadcastsHELLO messages. After receiveing the HELLO message, eachone-hop neighbor node will reply to it. In this way, a two-hopneighbor information table could be derived using the TTL (thenumber of HELLO messages transmitted) information. We setTTL to be 2 and record the source ID and its location initially.Once a message has been received by one neighbor node, theneighbor will also add its ID and location into the message,and then forward the it. After sending a message, the value ofTTL minus 1. When the TTL equals 0, the node that receivedthe message will no longer forward the HELLO message, butrecord the source node’s ID, the forwarder node’s ID and thelocation of each node. As a result, a two-hop neighbor nodeinformation table is formed.
The procedure is shown in Figure 3. Node B’s one-hopneighbor is A and C, node A’s one-hop neighbor is D, E andF . Therefore, the two-hop table of B will include all the nodeinformation.
HELLO HELLO
AB C
D
E
F
{A{D,E,F},C}
Fig. 3. Two-hop Neighbor Table.
A forwarding set is formed based on two-hop neighborinformation table. By greedy method, the nearest node fromthe destination is chosen from the table to forward the data.Let’s take node M (The nearest node from the destination)and node I for example. If M ’s one-hop neighbor node N isalso the neighbor of I , N will be added into the forwardingset of I . All of M ’s one-hop neighbor nodes participate in theabove process.
[14] proved that the routing reliability will be improvedusing the forwarding set. When a node failed, another nodetakes place of it. However, the ”hidden terminal” problemmay happen during the routing as shown in Figure 4. Aftertransmitting data to the forwarding set, a receiver in theforwarding set also selects its own forwarding set. There maybe some common members between two forwarding sets.When two nodes send data to one node, which is in bothnodes forwarding set, a hidden terminal problem happens. Inour paper, we solve it by carrying the node ID in the packet.After receiving a new packet, the node checks every member
node’s ID of the forwarders forwarding set. The same nodewill be removed form the nodes forwarding set.
Fig. 4. Hidden Terminal Problem.
2) Routing Between Vehicles: In the hybrid VANET, thereare usually two ways to communicate between vehicles. AR asthe backbone of VANET not only can provide Internet accessservice to vehicles, but also can serve as the forwarder totransmit the date to the next vehicle by infrastructure mode;Another communication way is using the neighbor vehicle toforward the data by ad hoc mode.
When a vehicle needs to communicate with an AR, a requestto a local AR is sent. Under normal circumstances, the ARwill provide an appropriate services. If the vehicle requestsfor Internet service, the AR will go through gateway fordata service. If the vehicle requests for data forwarding to adestination vehicle, local AR will collect the data and forwardit to the AR of the destination node, and then further forwardfrom the AR to the destination. Usually, AR in Wireless meshnetworks has longer transmission range and wider bandwidththen the WiFi device on the vehicles. Besides, AR is fixedand more stable than moving nodes. Therefore, AR basedinfrastructure communication could provide better data servicethen ad hoc communication. However, when the density oflocal vehicle users is high, their large data request will causecongestion on the local AR. In our scheme, once the AR isbusy on processing other data, vehicle user will bypass it andsearch for another suitable AR. In this way, the AR node whichis busy will avoid to fall into a congestion state.
When a vehicle uses ad hoc mode to forward the data to thenext vehicle, a greedy scheme is used in inter-vehicle routing.Initially, we have to form the forwarding sets by distributedmethod. There are many ways to form the forwarding sets. Inthe paper, the nearest neighbor node is chosen as the centernode, around which a forwarding set is formed. Using greedyscheme, the node always tries to select the neighbor whichis closest to the destination as the next hop. However, if noneighbor is closer to the destination than the node itself, LocalMax problem will happen and the node can not find next hopto forward the data. In our scheme, the data is sent to thedestination in the help of local AR and forwarding betweenARs. However, if the local AR is in congestion at the sametime, the opportunistic routing scheme will be used to find theproper next vehicle to forward the data.
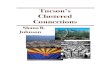
3) Opportunistic Routing: Due to some reasons, such asthe node mobility and obstacles, a connection hole usuallyhappens in ad hoc networks. Traditional routing protocols arenot suitable for this situation because they take it for grantedthat a network is always connected.
The opportunistic routing protocol takes advantage of thenode’s mobility to solve the connectionless problems in sparseor high mobile networks for data transmission. The data is for-warded to the destination using carry and forward scheme [3],as shown in Figure 5. Source wants the send the packet tothe destination. It selects node 3 as the next hop. However,after receiving the packet, node 3 can not find a neighborwhich is closer to the destiantion to forward the packet.Therefore, node 3 will store the packet and carry it for awhile during its movement. When node 3 meets node 4 inits transmission range and node 4 is closer to the destination,node 3 immediately forwards the packet to node 4.
Fig. 5. Opportunistic Routing.
We assume that GPS service is given for the opportunisticscheme so that the location, velocity, and traffic informationon the road will be provided by the data center. A next-hopnode is selected if the location of its future neighbor node iscloser to the destination.
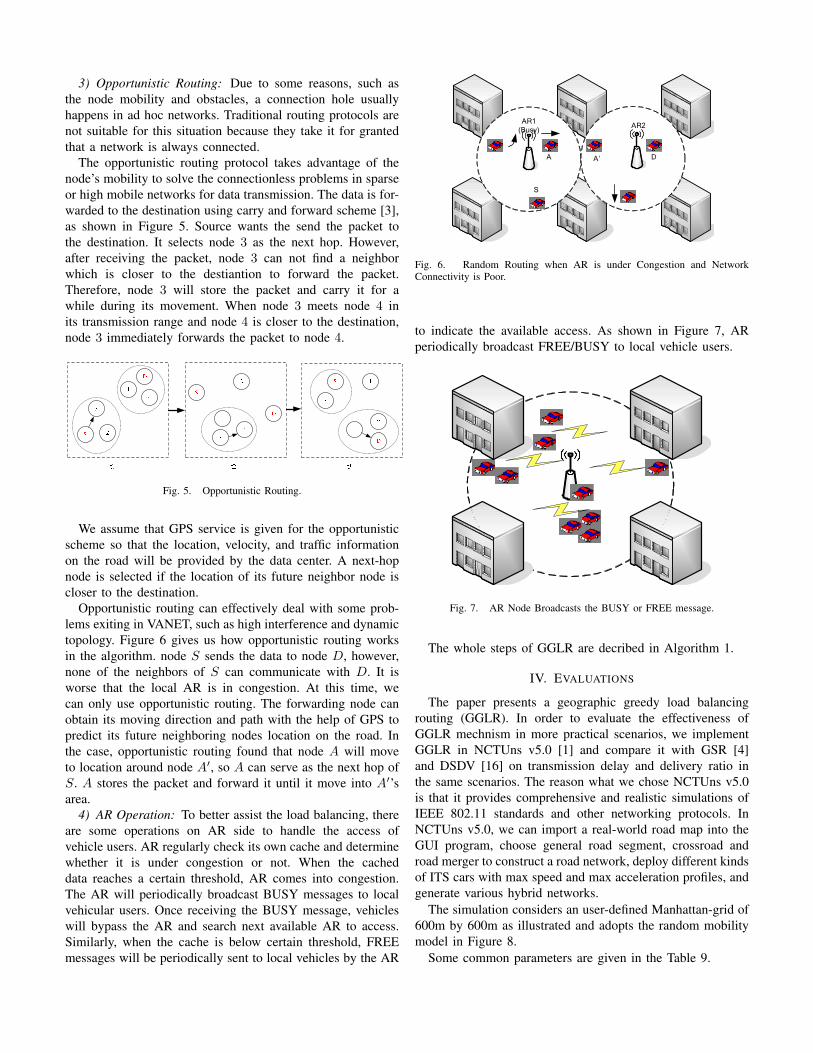
Opportunistic routing can effectively deal with some prob-lems exiting in VANET, such as high interference and dynamictopology. Figure 6 gives us how opportunistic routing worksin the algorithm. node S sends the data to node D, however,none of the neighbors of S can communicate with D. It isworse that the local AR is in congestion. At this time, wecan only use opportunistic routing. The forwarding node canobtain its moving direction and path with the help of GPS topredict its future neighboring nodes location on the road. Inthe case, opportunistic routing found that node A will moveto location around node A′, so A can serve as the next hop ofS. A stores the packet and forward it until it move into A′’sarea.
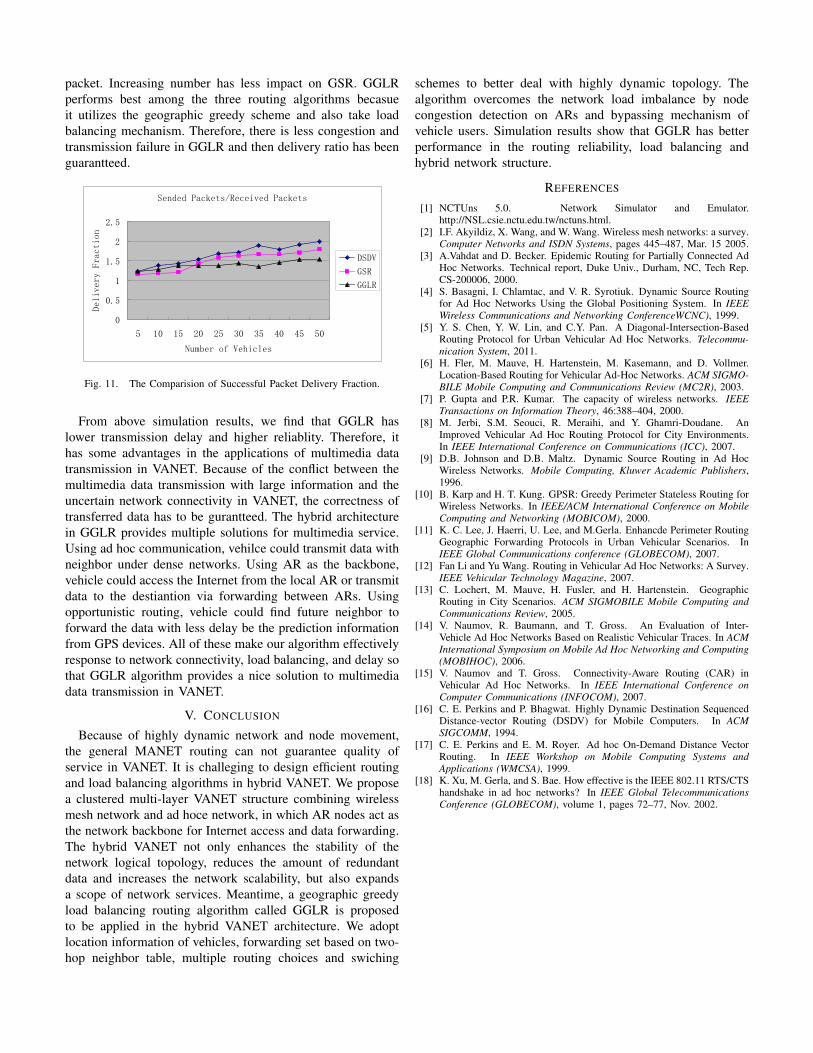
4) AR Operation: To better assist the load balancing, thereare some operations on AR side to handle the access ofvehicle users. AR regularly check its own cache and determinewhether it is under congestion or not. When the cacheddata reaches a certain threshold, AR comes into congestion.The AR will periodically broadcast BUSY messages to localvehicular users. Once receiving the BUSY message, vehicleswill bypass the AR and search next available AR to access.Similarly, when the cache is below certain threshold, FREEmessages will be periodically sent to local vehicles by the AR
S
DA A’
AR1 (Busy) AR2
Fig. 6. Random Routing when AR is under Congestion and NetworkConnectivity is Poor.
to indicate the available access. As shown in Figure 7, ARperiodically broadcast FREE/BUSY to local vehicle users.
S
DA A’
AR1 (Busy) AR2
Fig. 7. AR Node Broadcasts the BUSY or FREE message.
The whole steps of GGLR are decribed in Algorithm 1.
IV. EVALUATIONS
The paper presents a geographic greedy load balancingrouting (GGLR). In order to evaluate the effectiveness ofGGLR mechnism in more practical scenarios, we implementGGLR in NCTUns v5.0 [1] and compare it with GSR [4]and DSDV [16] on transmission delay and delivery ratio inthe same scenarios. The reason what we chose NCTUns v5.0is that it provides comprehensive and realistic simulations ofIEEE 802.11 standards and other networking protocols. InNCTUns v5.0, we can import a real-world road map into theGUI program, choose general road segment, crossroad androad merger to construct a road network, deploy different kindsof ITS cars with max speed and max acceleration profiles, andgenerate various hybrid networks.
The simulation considers an user-defined Manhattan-grid of600m by 600m as illustrated and adopts the random mobilitymodel in Figure 8.
Some common parameters are given in the Table 9.

Algorithm 1: GGLR Algorithm
According the services, choose the routing decitions. If it1
is inter-vehicle communition, go to step 2. If it isInternet service, go to step 6.Establish the forwarding set accoring the two-hop2
neighbor table. If Local Max occurs, go to step 3.Evaluate the congestion situation of ARs from the3
broadcast messeges. If it is BUSY, go to step 4. If it isFREE, go to step 5.Opportunistic routing to destination node.4
Forward the data from local AR to the AR of destination5
node, and further forward the data to the destinationnode.Evaluate the congestion situation of ARs from the6
broadcast messages. If it is BUSY, go to step 7. If it isFREE, AR provides the Internet service.Bypass the busy AR, and search next available AR.7
图表 1
Fig. 8. Simulation Scenario in NCTUns.
As shown in Figure 10, GGLR performs better than GSRand DSDV on end to end transmission delay. DSDV needsto maintain the whole link for transmission. Becasue of thehigh dynamic topology in VANET, to discover and establishnew link when previous link fails will induce a great cost.Especially when the nodes increase, DSDV have to update andmaintain the link frequently, resulting in longer transmissiondelay. GSR is also a geographic routing. There is no mainte-nance of the whole link in GSR. When the data is required totransmit, the only thing in GSR is to find the best neighbornode as the next hop by keeping updating neighbor nodes,which can greatly enhance the reliability and flexibility ofrouting. While nodes increase and the network load increases,GSR lacks a necessary load-balancing mechanism, leading toinefficient link usage and increasing end to end transmissiondelay.
GGLR utilizes the benefits of hybrid VANET, in which the
Area Size 600 m * 600 m
Road Structure Two Lanes
MAC 802.11 DCF
Communication Range 100 m
Packet Type UDP
Packet Size 1400 Bytes
Moving Speed 10 m/s
Simulation Time 150 s
Fig. 9. Common Parameters in the Simulation.
deployment of ARs serves as backbone nodes. AR not onlyprovides the Internet services, but also can give some helps forthe communication between nodes. GGLR has the advantagesof geographic routing algorithm, while provides network loadbalancing mechanism such as congestion detection on ARs andbypassing mechanism of vehicle users. It effectively avoid theincrease of transmission delay when the load is heavy. Whenthe AR is under congestion and network connectivity is poor,it will switch to the opportunisitic routing to take advantageof the movement of vehicles to achieve data forwardingwith less delay. At the Same time, data forwarding is basedon forwarding set and use node ID to avoid the ”hiddenterminal” problem, which further increases the reliability ofthe algorithm.
End to End Delay
0
0.2
0.4
0.6
0.8
5 10 15 20 25 30 35 40 45 50
Number of Vehicles
Delay (S)
GGLR
GSR
DSDV
Fig. 10. The Comparision of End to End Transmission Delay.
Figure 11 compares the performance of delivery ratio amongGGLR, GSR and DSDV. In the figure, it illustrates howmany packets for the same pakcet the source has to sendso that the destination can receive it. When the numberof node increases, the successful reception rate of DSDVdecreases fast. Becasue DSDV need to dicover and maintainthe whole link for the nodes. Increasing nodes will cause moreroute information in DSDV and the dynamic movement ofnode induce unstable link. GSR performs better than DSDVbecause it takes geographic greedy method to forward the
packet. Increasing number has less impact on GSR. GGLRperforms best among the three routing algorithms becasueit utilizes the geographic greedy scheme and also take loadbalancing mechanism. Therefore, there is less congestion andtransmission failure in GGLR and then delivery ratio has beenguarantteed.
Sended Packets/Received Packets
0
0.5
1
1.5
2
2.5
5 10 15 20 25 30 35 40 45 50
Number of Vehicles
Delivery Fraction
DSDV
GSR
GGLR
Fig. 11. The Comparision of Successful Packet Delivery Fraction.
From above simulation results, we find that GGLR haslower transmission delay and higher reliablity. Therefore, ithas some advantages in the applications of multimedia datatransmission in VANET. Because of the conflict between themultimedia data transmission with large information and theuncertain network connectivity in VANET, the correctness oftransferred data has to be gurantteed. The hybrid architecturein GGLR provides multiple solutions for multimedia service.Using ad hoc communication, vehilce could transmit data withneighbor under dense networks. Using AR as the backbone,vehicle could access the Internet from the local AR or transmitdata to the destiantion via forwarding between ARs. Usingopportunistic routing, vehicle could find future neighbor toforward the data with less delay be the prediction informationfrom GPS devices. All of these make our algorithm effectivelyresponse to network connectivity, load balancing, and delay sothat GGLR algorithm provides a nice solution to multimediadata transmission in VANET.
V. CONCLUSION
Because of highly dynamic network and node movement,the general MANET routing can not guarantee quality ofservice in VANET. It is challeging to design efficient routingand load balancing algorithms in hybrid VANET. We proposea clustered multi-layer VANET structure combining wirelessmesh network and ad hoce network, in which AR nodes act asthe network backbone for Internet access and data forwarding.The hybrid VANET not only enhances the stability of thenetwork logical topology, reduces the amount of redundantdata and increases the network scalability, but also expandsa scope of network services. Meantime, a geographic greedyload balancing routing algorithm called GGLR is proposedto be applied in the hybrid VANET architecture. We adoptlocation information of vehicles, forwarding set based on two-hop neighbor table, multiple routing choices and swiching
schemes to better deal with highly dynamic topology. Thealgorithm overcomes the network load imbalance by nodecongestion detection on ARs and bypassing mechanism ofvehicle users. Simulation results show that GGLR has betterperformance in the routing reliability, load balancing andhybrid network structure.
REFERENCES
[1] NCTUns 5.0. Network Simulator and Emulator.http://NSL.csie.nctu.edu.tw/nctuns.html.
[2] I.F. Akyildiz, X. Wang, and W. Wang. Wireless mesh networks: a survey.Computer Networks and ISDN Systems, pages 445–487, Mar. 15 2005.
[3] A.Vahdat and D. Becker. Epidemic Routing for Partially Connected AdHoc Networks. Technical report, Duke Univ., Durham, NC, Tech Rep.CS-200006, 2000.
[4] S. Basagni, I. Chlamtac, and V. R. Syrotiuk. Dynamic Source Routingfor Ad Hoc Networks Using the Global Positioning System. In IEEEWireless Communications and Networking ConferenceWCNC), 1999.
[5] Y. S. Chen, Y. W. Lin, and C.Y. Pan. A Diagonal-Intersection-BasedRouting Protocol for Urban Vehicular Ad Hoc Networks. Telecommu-nication System, 2011.
[6] H. Fler, M. Mauve, H. Hartenstein, M. Kasemann, and D. Vollmer.Location-Based Routing for Vehicular Ad-Hoc Networks. ACM SIGMO-BILE Mobile Computing and Communications Review (MC2R), 2003.
[7] P. Gupta and P.R. Kumar. The capacity of wireless networks. IEEETransactions on Information Theory, 46:388–404, 2000.
[8] M. Jerbi, S.M. Seouci, R. Meraihi, and Y. Ghamri-Doudane. AnImproved Vehicular Ad Hoc Routing Protocol for City Environments.In IEEE International Conference on Communications (ICC), 2007.
[9] D.B. Johnson and D.B. Maltz. Dynamic Source Routing in Ad HocWireless Networks. Mobile Computing, Kluwer Academic Publishers,1996.
[10] B. Karp and H. T. Kung. GPSR: Greedy Perimeter Stateless Routing forWireless Networks. In IEEE/ACM International Conference on MobileComputing and Networking (MOBICOM), 2000.
[11] K. C. Lee, J. Haerri, U. Lee, and M.Gerla. Enhancde Perimeter RoutingGeographic Forwarding Protocols in Urban Vehicular Scenarios. InIEEE Global Communications conference (GLOBECOM), 2007.
[12] Fan Li and Yu Wang. Routing in Vehicular Ad Hoc Networks: A Survey.IEEE Vehicular Technology Magazine, 2007.
[13] C. Lochert, M. Mauve, H. Fusler, and H. Hartenstein. GeographicRouting in City Scenarios. ACM SIGMOBILE Mobile Computing andCommunications Review, 2005.
[14] V. Naumov, R. Baumann, and T. Gross. An Evaluation of Inter-Vehicle Ad Hoc Networks Based on Realistic Vehicular Traces. In ACMInternational Symposium on Mobile Ad Hoc Networking and Computing(MOBIHOC), 2006.
[15] V. Naumov and T. Gross. Connectivity-Aware Routing (CAR) inVehicular Ad Hoc Networks. In IEEE International Conference onComputer Communications (INFOCOM), 2007.
[16] C. E. Perkins and P. Bhagwat. Highly Dynamic Destination SequencedDistance-vector Routing (DSDV) for Mobile Computers. In ACMSIGCOMM, 1994.
[17] C. E. Perkins and E. M. Royer. Ad hoc On-Demand Distance VectorRouting. In IEEE Workshop on Mobile Computing Systems andApplications (WMCSA), 1999.
[18] K. Xu, M. Gerla, and S. Bae. How effective is the IEEE 802.11 RTS/CTShandshake in ad hoc networks? In IEEE Global TelecommunicationsConference (GLOBECOM), volume 1, pages 72–77, Nov. 2002.









![CLUSTERED HEED BASED DATA TRANSFER ...arpnjournals.org/jeas/research_papers/rp_2016/jeas_1116...communication applications [4]. Hierarchical based routing appears to be in place ever](https://img.pdfslide.net/doc/110x75/5ff8ab3dbbc4ef20203c3886/clustered-heed-based-data-transfer-communication-applications-4-hierarchical.jpg)


![Energy Aware Clustered Based Multipath Routing in Mobile ...Split Multipath Routing (SMR) [7] is an on-demand Multipath source routing protocol can find an alternative route that is](https://img.pdfslide.net/doc/110x75/5f75d8f6c8655e7b617715e4/energy-aware-clustered-based-multipath-routing-in-mobile-split-multipath-routing.jpg)