Embed Size (px)
Citation preview

GEOMETRICAL REPRESENTATION, PROCESSING, AND CODINGOF VISUAL INFORMATION
Arthur Luiz Amaral da Cunha, Ph.D.Department of Electrical and Computer Engineering
University of Illinois at Urbana-Champaign, 2007Minh N. Do, Adviser
In recent years there has been considerable effort to construct representations for
visual information that exploits geometrical structure. The task of constructing mul-
tidimensional transforms that satisfy some optimality condition such as nonlinear ap-
proximation is ongoing. In this dissertation we make several contributions toward this
work.
In the first part of the dissertation, we propose a class of filter banks that have the
property of directional vanishing moments on the filters. This design criterion is an al-
ternative to the often used frequency localization property. The directional vanishing
moment property, we show, ensures that the filter annihilates directional information,
similar to the wavelet filter that annihilates smooth signals in one dimension. Our
technique produces filters that perform similarly to conventional ones, but that have
significantly shorter support size.
In the second part of the dissertation, we propose a multiscale, multidirection, shift-
invariant, and redundant transform that we call the nonsubsampled contourlet transform.
The redundant transform is tailored to applications where overcompleteness is an advan-
tage, for example image denoising and enhancement. This transform is studied in detail
and an associated filter design methodology is developed. The proposed design ensures
that the transform basis functions are regular, directional, and anisotropic.

In the third part of this dissertation we propose a model for the information rates of
the plenoptic function. Samples of the plenoptic function (POF) are seen in video and
in general visual content, and represent large amounts of information. We distinguish
between two cases, depending on whether the spatial positions of samples of the POF
are known.
In the first case, the video coding case, the spatial locations of the POF are not known.
In this case, we propose a stochastic model for video and compute its information rates.
We model camera motion with discrete random walks. We use information theoretic tools
to precisely characterize how such recurrences affect the overall bitrate. Both lossless and
lossy information rates are derived.
In the second case, we use a simple model to show that the information rates of the
POF are equivalent to the information rates of the scene around it.

GEOMETRICAL REPRESENTATION, PROCESSING, AND CODINGOF VISUAL INFORMATION
BY
ARTHUR LUIZ AMARAL DA CUNHA
Engenheiro, University of Brasilia, 2000Mestrado, Pontifical Catholic University of Rio de Janeiro, 2002
DISSERTATION
Submitted in partial fulfillment of the requirementsfor the degree of Doctor of Philosophy in Electrical and Computer Engineering
in the Graduate College of theUniversity of Illinois at Urbana-Champaign, 2007
Urbana, Illinois

ABSTRACT
In recent years there has been considerable effort to construct representations for
visual information that exploits geometrical structure. Such representations have the
potential to improve image and video processing, understanding, and practice on various
fronts including compression, denoising, and enhancement. The task of constructing
multidimensional transforms that satisfy some optimality condition such as nonlinear
approximation is ongoing. In this dissertation we make several contributions toward this
work.
In the first part of the dissertation, we propose a class of filter banks that have the
property of directional vanishing moments on the filters. Such property is a generalization
of the vanishing moment property in one-dimensional filter banks, and is characterized
by a simple design criterion. This design criterion is an alternative to the often used
frequency localization property. The directional vanishing moment property, we show,
ensures that the filter annihilates directional information, similar to the wavelet filter
that annihilates smooth signals in one dimension. Our technique produces filters that
perform similarly to conventional ones, but that have significantly shorter support size.
The images reconstructed after coefficient truncation exhibit considerably fewer ringing
artifacts. In denoising experiments, the filters proposed outperform the best ones in the
literature while being less complex at the same time.
In the second part of the dissertation, we propose a multiscale, multidirection, shift-
invariant, and redundant transform that we call the nonsubsampled contourlet transform.
The redundant transform is tailored to applications where overcompleteness is an advan-
tage, for example image denoising and enhancement. This transform is studied in detail
and an associated filter design methodology is developed. The proposed design ensures
iii

that the transform basis functions are regular, directional, and anisotropic. Furthermore,
we propose a fast implementation of the transform and study its application in image
denoising, where the nonsubsampled contourlet transform compares favorably to other
similar decompositions in the literature.
In the third part of this dissertation we propose a model for the information rates of
the plenoptic function. The plenoptic function (Adelson and Bergen, 91) describes the
visual information available to an observer at any point in space and time. Samples of the
plenoptic function (POF) are seen in video and in general visual content, and represent
large amounts of information. We distinguish between two cases, depending on whether
the spatial positions of samples of the POF are known.
In the first case, the video coding case, the spatial locations of the POF are not known.
In this case, we propose a stochastic model for video and compute its information rates.
The model has two sources of information representing ensembles of camera motion and
visual scene data (i.e., “realities”). The sources of information are combined, generat-
ing a vector process that we study in detail. We model camera motion with discrete
random walks. Recurrences are a key property associated with a random walk, and are
also observed in some video sequences. We use information theoretic tools to precisely
characterize how such recurrences affect the overall bitrate. Both lossless and lossy in-
formation rates are derived. The model is further extended to account for realities that
change over time. We derive bounds on the lossless and lossy information rates for this
dynamic reality model, stating conditions under which the bounds are tight.
In the second case, we use a simple model to show that the information rates of the
POF are equivalent to the information rates of the scene around it. That is, a random
traversal of the plenotic function for the purpose of rendering at a receiver results in the
information rate of the surrounding scene.
iv

TABLE OF CONTENTS
LIST OF FIGURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
LIST OF TABLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii
CHAPTER 1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . 11.1 Signal Expansions and Filter Banks . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Signal expansions . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1.2 Filter banks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 The Challenge of Geometry . . . . . . . . . . . . . . . . . . . . . . . . . 31.3 The Plenoptic Function and Its Information Rates . . . . . . . . . . . . . 41.4 Problem Statement and Contributions . . . . . . . . . . . . . . . . . . . 41.5 Dissertation Organization . . . . . . . . . . . . . . . . . . . . . . . . . . 7
CHAPTER 2 FILTER BANKS WITH DIRECTIONAL VANISHINGMOMENTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.2 Directional Annihilating Filters . . . . . . . . . . . . . . . . . . . . . . . 132.3 Two-channel Filter Banks with Directional Vanishing Moments . . . . . 16
2.3.1 Preliminaries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.3.2 Two-channel filter banks with DVMs . . . . . . . . . . . . . . . . 182.3.3 Characterization of the product filter . . . . . . . . . . . . . . . . 23
2.4 Design via Mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.4.1 Design procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.4.2 Filter size analysis . . . . . . . . . . . . . . . . . . . . . . . . . . 282.4.3 Design examples . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.5 Tree-Structured Filter Banks with Directional Vanishing Moments . . . 322.6 Numerical Experiments . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.6.1 Annihilating directional edges . . . . . . . . . . . . . . . . . . . . 352.6.2 Nonlinear approximation with the contourlet transform . . . . . . 372.6.3 Image denoising with the contourlet transform . . . . . . . . . . . 39
2.7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 402.8 The Equivalence Between Ladder and Mapping Designs . . . . . . . . . 41
vi

CHAPTER 3 THE NONSUBSAMPLED CONTOURLET TRANSFORM:THEORY, DESIGN, AND APPLICATIONS . . . . . . . . . . . . . . . 433.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 443.2 Nonsubsampled Contourlets and Filter Banks . . . . . . . . . . . . . . . 46
3.2.1 The nonsubsampled contourlet transform . . . . . . . . . . . . . . 463.2.1.1 The nonsubsampled pyramid (NSP) . . . . . . . . . . . 463.2.1.2 The nonsubsampled directional filter bank (NSDFB) . . 483.2.1.3 Combining the nonsubsampled pyramid and
nonsubsampled directional filter bank in the NSCT . . . 493.2.2 Nonsubsampled filter banks . . . . . . . . . . . . . . . . . . . . . 513.2.3 Frame analysis of the NSCT . . . . . . . . . . . . . . . . . . . . . 52
3.3 Filter Design and Implementation . . . . . . . . . . . . . . . . . . . . . . 553.3.1 Implementation through lifting . . . . . . . . . . . . . . . . . . . 563.3.2 Pyramid filter design . . . . . . . . . . . . . . . . . . . . . . . . . 573.3.3 Fan filter design . . . . . . . . . . . . . . . . . . . . . . . . . . . 603.3.4 Design examples . . . . . . . . . . . . . . . . . . . . . . . . . . . 613.3.5 Regularity of the NSCT basis functions . . . . . . . . . . . . . . . 63
3.4 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 663.4.1 Image denoising . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
3.4.1.1 Comparison to other transforms . . . . . . . . . . . . . . 663.4.1.2 Comparison to other denoising methods . . . . . . . . . 69
3.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
CHAPTER 4 THE INFORMATION RATES OF THE PLENOPTICFUNCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 734.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4.1.1 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 744.1.2 Prior art . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 754.1.3 Chapter contributions . . . . . . . . . . . . . . . . . . . . . . . . 75
4.2 Definitions and Problem Setup . . . . . . . . . . . . . . . . . . . . . . . . 774.2.1 The video coding problem . . . . . . . . . . . . . . . . . . . . . . 794.2.2 Properties of the random walk . . . . . . . . . . . . . . . . . . . 79
4.3 Information Rates for a Static Reality . . . . . . . . . . . . . . . . . . . . 804.3.1 Lossless information rates for discrete memoryless wall . . . . . . 804.3.2 Memory constrained coding . . . . . . . . . . . . . . . . . . . . . 854.3.3 Lossy information rates . . . . . . . . . . . . . . . . . . . . . . . . 86
4.4 Information Rates for Dynamic Reality . . . . . . . . . . . . . . . . . . . 894.4.1 Lossless information rates . . . . . . . . . . . . . . . . . . . . . . 904.4.2 Lossy information rates for the AR(1) random field . . . . . . . . 98
4.5 The Recording Reality Case . . . . . . . . . . . . . . . . . . . . . . . . . 1024.5.1 A possible code: Shannon + run-length . . . . . . . . . . . . . . . 1064.5.2 Coding with a finite buffer . . . . . . . . . . . . . . . . . . . . . . 108
4.6 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
vii

CHAPTER 5 CONCLUSION AND FUTURE DIRECTIONS . . . . . 1125.1 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1125.2 Future Directions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
5.2.1 Filter banks with directional vanishing moments . . . . . . . . . . 1145.2.2 The nonsubsampled contourlet transform . . . . . . . . . . . . . . 1145.2.3 Complex contourlet transform . . . . . . . . . . . . . . . . . . . . 1155.2.4 Information rates of the plenoptic function . . . . . . . . . . . . . 116
REFERENCES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
AUTHOR’S BIOGRAPHY . . . . . . . . . . . . . . . . . . . . . . . . . . 129
viii
LIST OF FIGURES
Figure Page
1.1 Pictorial description of a problem studied in this dissertation. There isa camera following a random trajectory through the plenoptic function.The camera motion adds to the complexity of the dynamic scene beingcontinuously acquired. The underlying scene is either static, or containsmoving objects, or changes over time. . . . . . . . . . . . . . . . . . . . 5
1.2 Filter design using the mapping approach. The 1-D filter bank is mappedto a 2-D filter bank. The mapping function is such that important proper-ties of the 1-D filter bank such as phase linearity and perfect reconstructionare preserved. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1 The directional polyphase representation. Here u = (2, 1)T and r1 =(0, 0)T , r2 = (1, 1)T , r3 = (0, 1)T , and r4 = (1, 0)T . The directionalpolyphase decomposition splits the signal into 1-D subsignals sampledalong the direction u. Those signals tile the whole 2-D discrete plane.We highlight in the picture some of the subsignals. . . . . . . . . . . . . 15
2.2 Illustration of line zero moments as an edge annihilator. The piecewisepolynomial image in (a) was filtered with a 2-D filter C(z1, z2) = (1 − z1z2
2)3.
The output image (b) pixels are approximately zero. . . . . . . . . . . . 172.3 Change of variable is equivalent to a pre/post resampling operation plus
filtering with modified filter. (a) Filter with DVM along u. (b) Equivalentfiltering structure with horizontal DVM. . . . . . . . . . . . . . . . . . . 20
2.4 Filter banks with DVMs along a fixed arbitrary direction are equivalentto a filter bank with DVMs along the horizontal direction. (a) Filter bankin which the filters have DVMs along the direction u. (b) The equivalentfilter bank with DVMs along the horizontal direction. Note that U isconstructed according to Proposition 2 and S = US. . . . . . . . . . . . 21
2.5 Frequency response of analysis and synthesis filters designed with fourth-order directional vanishing moment. The filters degenerate to the 9-7wavelet filters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.6 Frequency response of analysis and synthesis filters designed with second-order directional vanishing moment. . . . . . . . . . . . . . . . . . . . . . 31
2.7 Two types of prototype fan filter banks used in the DFB expansion tree.Each filter bank has one of its branches featuring a DVM. . . . . . . . . 32
ix

2.8 The DVM directional filter bank. (a) The four-channel DFB with type 0(horizontal) and type 1 (vertical) DVM filter banks. (b) The four-channelequivalent filter bank. The equivalent filter bank has DVMs in three dif-ferent directions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.9 Directional vanishing moments on equivalent filters of a 16-channel DFB.Different arrangements of type 0 and type 1 fan filter banks lead to differentnumbers of distinct directions. Each distinct direction is numbered. (a)Tree 1 has 8 distinct directions. (b) Tree 2 has 7 distinct directions. (c)Tree 3 has 6 distinct directions. . . . . . . . . . . . . . . . . . . . . . . . 34
2.10 Equivalent filters in an 8-channel DFB using two-channel filter banks withDVM. The filters are the ones designed in Example 2. Notice the goodfrequency localization in addition to the imposed DVMs (red line). . . . 35
2.11 Decomposition of synthetic image using two schemes. (a) Original image.(b) Wavelet decomposition. (c) DVM decomposition. . . . . . . . . . . . 36
2.12 The DVM Haar filters. In (a) the response of the filter H0(z) = (1 −z−11 z−3
2 )/√
2 is shown. Notice the single DVM that is replicated due toperiodicity. In (b) we have the response of the other Haar filter H10(z) =(1 − z−2
1 z2)/√
2 also used in the experiment. . . . . . . . . . . . . . . . . 372.13 Nonlinear approximation behavior of the contourlet transform with DVM
filters for a toy image. (a) Synthetic piecewise polynomial image. (b) NLAcurves (on a semilog scale). This simple toy image is better representedby the contourlet transform with DVM filters. . . . . . . . . . . . . . . . 38
2.14 Nonlinear approximation behavior of the contourlet transform with DVMfilters for natural images. NLA curves (on a semilog scale) for “Peppers”(a) and “Barbara” (b) images. . . . . . . . . . . . . . . . . . . . . . . . . 39
2.15 “Peppers” image reconstructed with 2048 coefficients. (a) PKVA filters,PSNR = 26.05 dB (b) DVM filters of Example 1, PSNR = 26.76 dB. Theimage on the right shows less ringing artifacts. . . . . . . . . . . . . . . . 40
3.1 The nonsubsampled contourlet transform. (a) Nonsubsampled filter bankstructure that implements the NSCT. (b) The idealized frequency parti-tioning obtained with the proposed structure. . . . . . . . . . . . . . . . 47
3.2 The proposed nonsubsampled pyramid is a 2-D multiresolution expan-sion similar to the 1-D nonsubsampled wavelet transform. (a) A three-stage pyramid decomposition. The lighter gray regions denote the aliasingcaused by upsampling. (b) The subbands on the 2-D frequency plane. . 47
3.3 A four-channel nonsubsampled directional filter bank constructed withtwo-channel fan filter banks. (a) Filtering structure. The equivalent filterin each channel is given by Ueq
k (z) = Ui(z)Uj(zQ). (b) Correspondingfrequency decomposition. . . . . . . . . . . . . . . . . . . . . . . . . . . 49
x

3.4 The need for upsampling in the NSCT. (a) With no upsampling, the high-pass at higher scales will be filtered by the portion of the directional filterthat has “bad” response. (b) Upsampling ensures that filtering is done inthe “good” region. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.5 The two-channel nonsubsampled filter banks used in the NSCT. The sys-tem is two times redundant and the reconstruction is error free when thefilters satisfy Bezout’s identity. (a) Pyramid NSFB. (b) Fan NSFB. . . . 51
3.6 Lifting structure for the nonsubsampled filter bank designed with the map-ping approach. The 1-D prototype is factored with the Euclidean algo-rithm. The 2-D filters are obtained by replacing x #→ f(z). . . . . . . . . 56
3.7 Magnitude response of the filters designed in Example 3 with maximallyflat filters. The nonsubsampled pyramid filter bank underlies almost tightanalysis and synthesis frames. . . . . . . . . . . . . . . . . . . . . . . . . 63
3.8 Fan filters designed with prototype filters of Example 3 and diamond max-imally flat mapping filters. . . . . . . . . . . . . . . . . . . . . . . . . . 64
3.9 Basis functions of the nonsubsampled contourlet transform. (a) Basis func-tions of the second stage of the pyramid. (b) Basis functions of third (top8) and fourth (bottom 8) stages of the pyramid. . . . . . . . . . . . . . . 67
3.10 Image denoising with the NSCT and hard thresholding. The noisy inten-sity is 20. (a) Original Lena image. (b) Denoised with the NSWT, PSNR= 31.40 dB. (c) Denoised with the curvelet transform and hard thresh-olding, PSNR = 31.52 dB. (d) Denoised with the NSCT, PSNR = 32.03dB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
3.11 Comparison between the NSCT-LAS and BLS-GSM denoising methods.The noise intensity is 20. (a) Original Barbara image. (b) Denoised withthe BLS-GSM method, PSNR = 30.28 dB. (c) Denoised with NSCT-LAS,PSNR = 30.60 dB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
4.1 The problem under consideration. There is a world and a camera thatproduces a “view of reality” that needs to be coded with finite or infinitememory. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
4.2 A stochastic model for video. (a) Simplified model. (b) The resultingvector process V . Each sample of the vector process is a block of L samplesfrom the process X taken at the position indicated by the random walkWt. In the figure L = 4. . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4.3 Bounds on information rate. (a) Lower and upper bounds as a function ofpW for the binary wall with pX = 1/2 and L = 8. . . . . . . . . . . . . . 84
4.4 Memory constrained coding. Difference H(V )−H(VM |V M) as a functionof M . When pW = 0.5, the bit rate can be lowered significantly at thecost of large memory. A moderate bit rate reduction is obtained with smallvalues of M when pW = 0.1. The curves are computed using Theorem 1for X uniform over an alphabet of size 256. . . . . . . . . . . . . . . . . 86
xi

4.5 A model for the dynamic reality. (a) It entails a random field that isMarkov in the time dimension t, and i.i.d. in the spatial dimension n. (b)Motion then occurs within this random field. . . . . . . . . . . . . . . . 91
4.6 The binary random field. Innovations are in the form of bit flips causedby binary symmetric channels between consecutive time instants. . . . . 94
4.7 The binary symmetric innovations. (a) The curves show the lower andupper bounds on the entropy rate. Notice that the bounds are sharp forvarious values of pI . (b) Contour plots of the upper bound for various pI
and pW . The lines indicate points of similar entropy but with differentamounts of spatial and temporal innovation. . . . . . . . . . . . . . . . 96
4.8 Memory and Innovations. Shown is the difference between the conditionalentropy and the true entropy for the binary innovations with pX = 0.5,pW = 0.5, and L = 8. The curves show the intuitive fact that when thebackground changes too rapidly, there is little to be gained in bitrate byutilizing more memory. . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
4.9 Differential entropy bounds for the Gaussian AR(1) case as function ofthe innovation parameter ρ. In this example Pe is small enough that thelower and upper bounds practically coincide. Note that the slope of thedifferential entropy curve is influenced by the value of pW . . . . . . . . . 99
4.10 Performance of DPCM with motion for various ρ and pW . For ρ = 0.99 andρ = 0.9 the upper bound is valid for SNR greater than 23 dB and 12.8 dB,respectively. (a) Memory provide considerable gains, pW = 0.5, ρ = 0.99.(b) Modest gains when pW = 0.1. (c) Modest gains when ρ = 0.9, asbackground changes too rapidly. . . . . . . . . . . . . . . . . . . . . . . 103
4.11 The proposed code for the trajectory. The proposed code with buffer sizeK attains an entropy rate of roughly 1/K. Notice that when K is infinity,the code attains the entropy rate bound as the number of samples j goesto infinity. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
5.1 The idealized analytic complex transform. The frame elements are sup-ported on the first and third quadrants of the frequency plane. The realand imaginary parts of each atom are supported in the whole plane fol-lowing the dashed boundaries. . . . . . . . . . . . . . . . . . . . . . . . . 115
5.2 Complex contourlet transform basis functions (4 out of 8 directions shown).real and imaginary parts on top and bottom, respectively. Note the dif-ferent symmetry of the real and imaginary parts. . . . . . . . . . . . . . 116
xii

LIST OF TABLES
Table Page
2.1 Improvement in image denoising. . . . . . . . . . . . . . . . . . . . . . . 41
3.1 Frame bounds evolving with scale for the pyramid filters given in Example3 in Section 3.3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.2 Maximally flat mapping polynomials used in the design of the nonsubsam-pled fan filter bank. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
3.3 Denoising performance of the NSCT. The left-most columns are hardthresholding and the right-most ones soft estimators. For hard thresh-olding, the NSCT consistently outperforms curvelets and the NSWT. TheNSCT-LAS performs on a par with the more sophisticated estimator BLS-GSM and is superior to the BivShrink estimator of. . . . . . . . . . . . 68
3.4 Relative loss in PSNR performance (dB) when using the NSP with a criti-cally sampled DFB and the LAS estimator with respect to the NSCT-LASmethod. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
xiii

CHAPTER 1
INTRODUCTION
1.1 Signal Expansions and Filter Banks
1.1.1 Signal expansions
In a variety of signal processing applications, processing can be done more efficiently
over the domain of an invertible linear transform. Early examples of such transforms
in signal processing are the discrete fourier transform (DFT) and the discrete cosine
transform (DCT). A more recent example is the discrete wavelet transform (DWT),
which has been proven effective in a wide range of applications (see e.g., [1]). Transforms
such as these are characterized by a set of vectors that form an orthogonal basis for the
underlying Hilbert space. The DWT has the attractive feature of being multiscale. That
is, it decomposes the signal in several scales, each one characterized by a set of basis
vectors [2]. The multiscale property enables the transform to highlight different features
in different scales, thereby facilitating processing.
An important feature of orthogonal bases is that they are nonredundant. This means
that for finite signals, the number of samples of the transformed signal is the same as
that of the input. This is a crucial property in compression applications. By contrast,
a frame is a redundant transform such that its output for a given input signal can be
reconstructed in a stable way [2, 3].
A frame is characterized by a set of vectors that are linear dependent. This set often
leads to a straightforward expansion resembling that of an orthogonal or biorthogonal
1

basis. Frames are typically better alternatives to orthogonal basis in applications where
redundancy is not a major issue. In addition, in some cases the design of frame systems
can be considerably easier than basis due to the smaller number of constraints.
1.1.2 Filter banks
Filter banks have been a very active research subject in the last 20 years. Since the
discovery of perfect reconstruction filter banks [4–6], great progress has been made. This
culminated in a number of books on the subject [1, 7–10]. Noteworthy is the connection
between tree-structured filter banks and orthogonal wavelet bases [2, 11]. This link
provides an easy interchange between continuous and discrete time that is useful in
understanding and in applications.
Perfect reconstruction filter banks can be critically sampled or oversampled. Critically
sampled filter banks are nonexpansive and underlie orthogonal or biorthogonal bases in
discrete time. In an oversampled filter bank [12, 13], the number of samples in the
output signal is greater than that of the input (i.e., the analysis part is expansive).
Thus, oversampled filter banks implement redundant expansions that under additional
conditions can constitute frames.
Among oversampled filter banks is the nonsubsampled filter bank where the redun-
dancy is given by the number of channels in the bank. Because nonsubsampled filter
banks do not have downsamplers and upsamplers, they have the property of being shift-
invariant. This property is hard to obtain with critically sampled filter banks in that it
requires ideal filters which are nonrealizable.
The theoretical aspects of filter banks are well understood in general, both in one and
several dimensions. However, the design tools existent in the literature mostly focus on
the 1-D and critically sampled case. Recently there have been several methods to design
oversampled 1-D filter banks in the context of framelets [14, 15]. For the multidimensional
case, there are very few design methodologies for both critically sampled and oversampled
cases.
2

1.2 The Challenge of Geometry
Natural images are rich in geometric structure. Yet most image transforms employed
in practice are “geometry blind.” Such transforms are typically constructed with basis
functions that are tensor products of one-dimensional basis functions. The transform
is thus computed on a row-column processing. In words, it treats a 2-D signal as a
collection of 1-D ones. Hence, it fails to exploit regularity on edges, contours, and other
geometrical features of the image.
In recent years, there have been several efforts toward constructing transforms that
exploit geometric structure. For example, Mallat and others constructed the bandelet
transform [16, 17], which is an adaptive transform – it adapts the basis vectors according
to the signal being represented. The wedgelet transform is also adaptive. It tiles smooth
geometry with building block wedge-like tiles [18, 19]. The curvelet transform is a fixed
transform that is a frame. Despite being nonadaptive, the curvelet transform essentially
attains the same theoretical performance of bandelets and wedgelets. Do and Vetterli
[20] constructed the contourlet transform. Contourlets are curvelets’ discrete-time cousin.
The notable feature of contourlets is that the transform can be efficiently computed with
filter banks.
On a related front, signal processing researchers have long tried to build transforms
with additional directionality. For example, the steerable pyramid [21] is a multiscale
transform that has better directional resolution than the separable DWT. The directional
filter bank of Bamberger and Smith is a directional decomposition that can be computed
with quincunx filter banks [22, 23]. The complex wavelet transform of [24] improves
the directional resolution of wavelets while being complex-valued at the same time. This
results in an almost shift-invariant transform with low redundancy that can be computed
efficiently.
3

1.3 The Plenoptic Function and Its Information Rates
The problem of sensing visual information for storage and later reproduction can be
cast in terms of sampling and compressing the plenoptic function [25]. Given a 3-D scene,
the plenoptic function describes the light intensity passing through every viewpoint, in
every direction, for all time, and for every wavelength. It is usually denoted by
POF (x, y, z,φ,ϕ, t,λ),
where (x, y, z) is the point in Euclidean space being considered, t is time, λ is the light
ray wavelength, and the angles (φ,ϕ) characterize the direction at which the light ray
hits the point (x, y, z).
The sampling part of the plenoptic function (POF) has received a lot of attention
recently. In [26] a sampling framework based on epipolar geometry is proposed, while
in [27], the plenoptic function is shown to have infinite bandwidth. In [28], a spectral
analysis of the sampling problem for the plenoptic function is presented.
Compression schemes for several simplifications of the POF are reviewed in [29].
While several algorithms to compress the POF have been proposed, a sound theoretical
understanding of the associated source coding problem is still lacking.
In some applications, the POF falls into the setup shown in Figure 1.1. In it, there is
a camera traversing the plenoptic function. As it moves through the scene, the camera
generates a process that needs to be coded and reproduced at a decoder. The process
can constitute a sequence of snapshots, for example in the case of video. Information
can also be acquired for the purpose of reproducing the scene around the camera, such
as, for example, in the light field.
1.4 Problem Statement and Contributions
Given the context outlined in the previous section, we consider in this dissertation
the following unresolved problems:
4

Figure 1.1 Pictorial description of a problem studied in this dissertation. There isa camera following a random trajectory through the plenoptic function. The cameramotion adds to the complexity of the dynamic scene being continuously acquired. Theunderlying scene is either static, or contains moving objects, or changes over time.
• Is is known that the DWT is the optimal1 representation for 1-D piecewise smooth
signals [1]. This is due to vanishing moments in the filter bank that ensure the
smooth part is zeroed out in the highpass branch. Is there a similar property for
edges in 2-D signals? In this case, how can the corresponding filter bank be designed?
• Given the lack of directionality of the nonsubsampled wavelet transform, we seek to
design and construct a transform that is multiscale, multidirectional, shift-invariant,
and can be implemented using a fast computational algorithm.
• Consider the plenoptic function. We seek to quantify its compression limits. A par-
ticular case of the plenoptic function is that of video. How to construct a statistical
1In the Nonlinear Approximation sense. Let the signal be reconstructed with the N largest-magnitudetransform coefficients. The transform is optimal in the NLA sense if the decay of the mean-squared error(MSE) as a function of N is the fastest possible for that signal.
5
model for a scene that has motion in it such that the information rates such as en-
tropy and rate-distortion can be computed with precision? Another common setup
of the POF is the light field [30, 31]. What are the information rates associated
with this problem?
To address the problems outlined above several contributions are made. These con-
tributions are summarized below:
• We propose a new filter design criterion for multiple dimensions, that is, filters with
directional vanishing moments.
• We characterize the eigensignals of such filters. We also develop a design method-
ology that can be extended to any number of dimensions.
• We propose a new transform construction that is fully shift-invariant. We study this
transform in detail and provide methods for its design and efficient computation.
• We study the compression problem of the plenoptic function. We propose a statis-
tical model for a camera traversing the plenoptic function. Within this model, we
distinguish between two coding problems, that of video and that of the light field.
We then propose a stochastic model for video whereby information rates can be
precisely computed. We also characterize the information rate in the case of the
light field.
Perhaps the greatest challenge in constructing transforms that better handle geometry
and that can be computed with filter banks is filter design. The design of 2-D filter banks
still lacks a definitive tool. The main impairment is the absence of a factorization theorem
in multiple dimensions [32].
In this dissertation we use the mapping approach to design filters. This method is
essentially illustrated in Figure 1.2, for the critically sampled case. It extends easily to
the nonsubsampled case. Despite its simplicity, the mapping design has several advan-
tages over other methods. In particular, it offers seamless control over frequency and
6
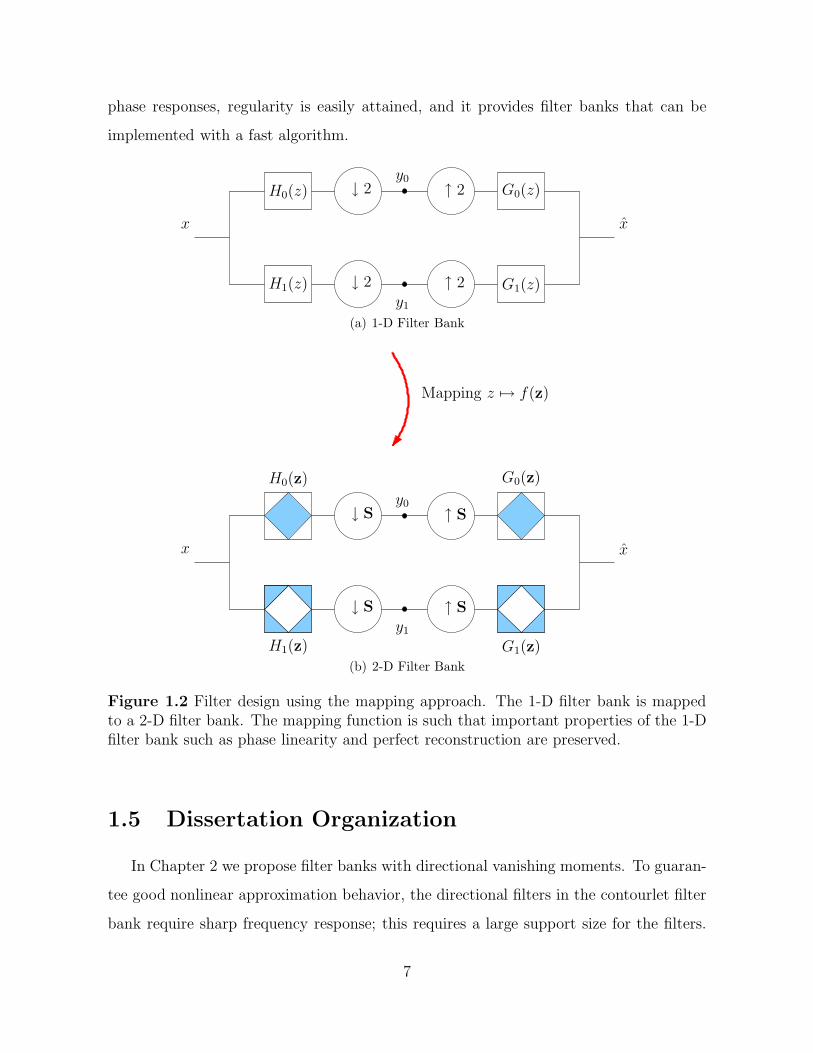
phase responses, regularity is easily attained, and it provides filter banks that can be
implemented with a fast algorithm.
H0(z)
H1(z)
G0(z)
G1(z)
x x
y0
y1
↓ 2
↓ 2
↑ 2
↑ 2
(a) 1-D Filter Bank
Mapping z #→ f(z)
y0
y1
H0(z)
H1(z)
G0(z)
G1(z)
x x
↓ S
↓ S
↑ S
↑ S
(b) 2-D Filter Bank
Figure 1.2 Filter design using the mapping approach. The 1-D filter bank is mappedto a 2-D filter bank. The mapping function is such that important properties of the 1-Dfilter bank such as phase linearity and perfect reconstruction are preserved.
1.5 Dissertation Organization
In Chapter 2 we propose filter banks with directional vanishing moments. To guaran-
tee good nonlinear approximation behavior, the directional filters in the contourlet filter
bank require sharp frequency response; this requires a large support size for the filters.
7

We seek to isolate the key filter property that ensures good approximation. In this di-
rection, we propose filters with directional vanishing moments (DVM). These filters, we
show, annihilate information along a given direction. We study two-channel filter banks
with DVM filters. We provide conditions under which the design of DVM filter banks
is possible. A complete characterization of the product filter is thus obtained. We pro-
pose a design framework that avoids two-dimensional factorization using the mapping
technique. The filters designed, when used in the contourlet transform, exhibit nonlinear
approximation comparable to the conventional filters while being shorter and therefore
provide better visual quality with less ringing artifacts.
In Chapter 3 we develop the nonsubsampled contourlet transform (NSCT) and study
its applications. The construction proposed in this chapter is based on a nonsubsampled
pyramid structure and nonsubsampled directional filter banks. The result is a flexible
multiscale, multidirection, and shift-invariant image decomposition that can be efficiently
implemented via the “a trous” algorithm. At the core of the proposed scheme is the
nonseparable two-channel nonsubsampled filter bank. We exploit the less stringent design
condition of the nonsubsampled filter bank to design filters that lead to a NSCT with
better frequency selectivity and regularity when compared to the contourlet transform.
We propose a design framework based on the mapping approach, that allows for a fast
implementation based on a lifting or ladder structure, and only uses one-dimensional
filtering in some cases. In addition, our design ensures that the corresponding frame
elements are regular, symmetric, and the frame is close to a tight one. We assess the
performance of the NSCT in image denoising. The NSCT compares favorably to other
existing methods in the literature.
In Chapter 4 we propose a model to study information rates of the plenoptic function.
The POF setup enables us to construct a stochastic model for video generation. This
model is studied with information theoretic tools, and the associated information rates
are computed. We extend this video model to make it account for dynamic changes
in a scene. Experiments with synthetic sources using DPCM coding suggest that the
introduction of motion in effect makes DPCM perform suboptimally relative to the rate-
8

distortion bound even with perfect knowledge of the motion. We also consider the coding
problem associated with light fields.
In Chapter 5 we make concluding remarks, and we outline our ongoing work and
potential developments to be made in the future.
9

CHAPTER 2
FILTER BANKS WITH DIRECTIONALVANISHING MOMENTS
The contourlet transform was proposed to address the limited directional resolution
of the separable wavelet transform. One way to guarantee good approximation behavior
is to let the directional filters in the contourlet filter bank have sharp frequency response.
This requires filters with large support size. We seek to isolate the key filter property
that ensures good approximation. In this direction, we propose filters with directional
vanishing moments (DVM). These filters, we show, annihilate information along a given
direction. We study two-channel filter banks with DVM filters. We provide conditions
under which the design of DVM filter banks is possible. A complete characterization
of the product filter is thus obtained. We propose a design framework that avoids two-
dimensional factorization using the mapping technique. The filters designed, when used
in the contourlet transform, exhibit nonlinear approximation comparable to the conven-
tional filters while being shorter and therefore provide better visual quality with fewer
ringing artifacts. Furthermore, experiments show that the proposed filters outperform
the conventional ones in image approximation and denoising.
2.1 Introduction
The separable discrete wavelet transform has established itself as a state-of-the art
tool in several image processing applications, including compression, denoising, and fea-
The results of this chapter are presented in references [33–35].
10

ture extraction. A key property, which partially justifies the efficiency of wavelets in
applications, is that it provides a sparse representation for several classes of images.
Such sparsity can be precisely measured in some cases as the decay of the coefficients
magnitude. In spite of its high applicability, it is known that separable wavelets fail to ex-
plore the geometric regularity existent in most natural scenes, thus offering a suboptimal
sparse representation. In this context, it is believed that the next generation transform
coding compression algorithms will use a transform that better handles orientation and
geometric information. In this direction, a number of researchers have proposed image
representation schemes that achieve optimal sparsity behavior for some reasonable image
model. Such is the case of the curvelet tight frames proposed by Candes and Donoho [36].
Inspired by curvelets, Do and Vetterli proposed the contourlet transform [20], which is
a multiscale directional representation constructed in the discrete grid by combining the
Laplacian pyramid [25, 37] and the directional filter bank (DFB) [23]. The distinctive
feature of both curvelets and contourlets is that they are nonadaptive schemes.
Geometric regularity in images is exhibited through the fact that image edges are typ-
ically located along smooth contours. Thus, image singularities (i.e., edges) are localized
in both location and direction. In order to extend 1-D wavelets crucial property for good
approximation, namely vanishing moments [1], new 2-D representations like contourlets
require a new condition named directional vanishing moment [20]. For contourlets, such
property can be imposed by carefully designing the refinement filters. Ideally, if the fil-
ters in the contourlet construction (see [20, 38] for details) are sinc-type filters with ideal
response, then the contourlet atoms are guaranteed to have DVMs in an infinite number
of directions. In practice, however, ideal filters are approximated with a finite number
of coefficients, and to ensure having DVMs, this number has to be large, thus increasing
complexity. Alternatively, if FIR filters with enough DVMs can be obtained, one could
achieve similar performance with potentially shorter filters, which would result in a fast
and efficient decomposition algorithm. In addition, as we learned from the wavelet expe-
rience, short filters (e.g., the filters chosen for the JPEG2000 standard) are very desirable
for images as they are less affected by the Gibbs phenomena artefact.
11

In this chapter we study two-channel critically sampled filter banks with DVMs. The
DVM property leads to a new filter bank design problem and, to the best of our knowl-
edge, this is the first work that addresses this problem. Two-channel filter banks are
attractive since they are simpler to design and can be used in a tree structure to generate
more complicated systems such as the DFB. Our goal is to impose directional vanishing
moments in the contourlet basis function without resorting to long filters. That is, we
attempt to cancel directional information using DVMs instead of good frequency selec-
tivity, thus working with shorter filters and avoiding the Gibbs phenomena (see Figure
2.15). Although our initial motivation for the DVM filter bank design is the contourlet
transform, we point out that our methods are general and can be applied in more general
contexts. Potential applications of the filters designed in this work are in the contourlet
transform of [20], the CRISP-contourlet system [39], and directionlets [40]. A preliminary
version of the present work has appeared in [33].
The chapter is structured as follows. In Section 2.2 we study filters with DVM and the
class of signals that would be annihilated by such filter. In Section 2.3 we study the DVM
in the context of 2-D FIR two-channel filter banks. We provide existence conditions as
well as the design constraints. We also provide a complete characterization of the product
filter of those filter banks. To overcome 2-D factorization, in Section 2.4 we propose a
design procedure using the mapping technique. The design is simple to carry out and
uses the solution introduced in Section 2.3. In Section 2.5 we study the use of filter banks
with DVM in the contourlet construction. Experiments illustrating the approximation
properties of the proposed filters are presented in Section 2.6 and conclusions drawn in
Section 2.7.
Notation: Throughout the chapter we use boldface and capital boldface characters
to represent two-dimensional (2-D) vectors and 2 × 2 matrices, respectively. Thus, a
discrete 2-D signal is denoted by x[n] where n = (n1, n2)T . The 2-D z-transform of a
signal x[n] is denoted by X(z), where it is understood that z is shorthand for (z1, z2)T .
If u = (u1, u2)T is a vector in Z2, then we denote zu = zu11 zu2
2 , whereas zS = (zs1 , zs2)T
with the integer vectors s1 and s2 being the columns of the matrix S. Note that with
12

this notation, if S is a matrix of integers and u is an integer vector, then (zS)u = z(Su).
In the unit sphere we write X(ω) for X(ejω), where ωT = (ω1,ω2)T . We we use both
notations X(z), and X(ω), according to which one is more convenient. A 1-D signal and
its z-transform are denoted by x[n] and X(z), respectively.
2.2 Directional Annihilating Filters
Much of the efficiency of wavelets in analyzing transient signals is due to the vanish-
ing moments in the wavelet function and its practical consequences [1]. Together with
the time localization property, wavelets with vanishing moments provide a sparse repre-
sentation for piecewise polynomial signals. Most successful wavelet filters, such as the
orthogonal Daubechies family and the JPEG2000 filters, were designed with vanishing
moment as a primary design criterion. This is in contrast to early filter bank construc-
tions in which the frequency selectivity was a primary goal. Vanishing moments in a
wavelet transform can be characterized by zeros in the highpass filters of the underlying
filter bank. Suppose H1(z) is the highpass analysis filter of a two-channel filter bank. A
vanishing moment of order d is characterized by d zeros at z = 1 or ω = 0 on the unit cir-
cle. That is, the filter is factored as H1(z) = (1− z)dR1(z). The filter H1(z) is related to
discrete polynomial signals of degree less than d — signals of the form x[n] =∑i
j=0 αjnj ,
with αj real and 0 ≤ i < d. In particular, filtering x[n] with H1(z) produces a zero out-
put (see for example [9, 41]). In other words, the filter H1(z) totally annihilates discrete
polynomials of degree less than d.
For 2-D filter banks with two channels, the vanishing moment concept can be general-
ized as point zeros at z = (1, 1)T or ω = (0, 0)T [42, 43]. However, filters with point-zeros
on the 2-D frequency plane do not cancel piecewise smooth images with discontinuities.
A somewhat different philosophy motivated by contourlets is the directional vanishing
moment in which the zeros are required to be along a line. Formally, we define DVM as
follows.
13

Definition 1 Let C(z) be a discrete filter and u = (u1, u2)T be a 2-D vector of coprime
integers. We say C(z) has a DVM of order d along the direction u if it can be factored
as
C(z) = (1 − zu11 zu2
2 )d R(z), or
C(ω) =(1 − ej(ω1u1+ω2u2)
)dR(ω). (2.1)
For contourlets, the filter C(z) is a composite one, which involves the Laplacian pyramid
filters and the polyphase components of the directional filters [20].
A question of interest is: What signal would be annihilated (i.e., completely filtered
out) by the filter in (3.20)? Such a signal is an eigen-signal of the complementary branch
of a two-channel filter bank where C(z) is an analysis filter. This filter bank will be
studied in detail in the next section. Similar to the 1-D case, 2-D filter banks with
filters of the form in (3.20) have interesting properties with respect to approximation of
smooth signals. In order to see those properties, we introduce the directional polyphase
representation.
Lemma 1 Suppose that u ∈ Z2 and u2 *= 0. Then for every n ∈ Z2 there exists a unique
pair (k, r) where k ∈ Z, r ∈ R := Z × {0, 1, . . . , |u2|− 1} such that
n = ku + r. (2.2)
Proof. Notice that (2.2) is equivalent to having n1 = ku1 + r1 and n2 = ku2 + r2. For
the second equation, k and r2 are uniquely determined as the quotient and remainder of
n2 divided by u2. Given k, from the first equation, r1 is also uniquely determined. !
Throughout the chapter we assume u2 *= 0. The case u2 = 0 can be similarly handled
by swapping the two variables u1,u2. Lemma 1 allows us to partition any 2-D signal x[n]
into a set of disjoint 1-D signals {xr[k] : r ∈ R} with
xr[k] := x[ku + r]. (2.3)
14

n1
n2
xr1 [k]
xr2 [k]
xr3 [k]
xr4 [k]
x[n]
Figure 2.1 The directional polyphase representation. Here u = (2, 1)T and r1 = (0, 0)T ,r2 = (1, 1)T , r3 = (0, 1)T , and r4 = (1, 0)T . The directional polyphase decompositionsplits the signal into 1-D subsignals sampled along the direction u. Those signals tile thewhole 2-D discrete plane. We highlight in the picture some of the subsignals.
Figure 2.1 illustrates the directional polyphase representation. Note that each signal
xr[k] is a 1-D slice of x[n] along the direction u. Therefore, the directional polyphase
representation is distinct from the ordinary polyphase representation. Using Lemma 1,
we can characterize the signals that are annihilated by the filter C(z).
Proposition 1 Let C(z1, z2) be a 2-D filter with a factor (1−zu11 zu2
2 )d. Then a signal x[n]
is annihilated by C(z) if each 1-D signal xr[k] defined in (2.3) is a discrete polynomial
of degree less than d.
Proof. Using Lemma 1 we have that
X(z) =∑
n∈Z2
x[n]z−n
=∑
k∈Z
∑
r∈R
x[ku + r]z−(ku+r)
=∑
r∈R
z−r∑
k∈Z
xr[k]z−ku
=∑
r∈R
z−rXr(zu).
Since the signals xr[k] are polynomials of degree less than d, as in the 1-D case, each
term Xr(zu) is annihilated by a factor (1−zu)d. Thus it follows that X(z) is annihilated
by C(z1, z2). !
15

An immediate consequence of Proposition 1 is that discrete signals sampled from
a continuous-time signal which is smooth away from line discontinuities along a given
direction, are also annihilated by C(z1, z2). In other words, if xc(t) is a continuous-time
piecewise polynomial signal of degree less than d and x[n] = xc(∆Tn), then it follows
that x[n] is annihilated by a filter C(z) with a factor (1 − zu)d.
As an illustration, we filter a piecewise smooth image with a 2-D filter with a third-
order DVM along direction u = (1, 2)T . The image is described by e−x2
−y2
α +1{β1<y−2x<β2}.
Such an image is well approximated by a piecewise polynomial image of sufficiently large
degree d. As can be seen in Figure 2.2, the edge was totally annihilated by the filtering
operation. Notice that the DVM formulation is in the space domain, and the annihilation
of directional edges takes place regardless of the frequency response of the filters. This
is similar to the 1-D wavelet case in which “zeros at π” alone ensures the cancellation of
smooth signals.
2.3 Two-channel Filter Banks with Directional Van-ishing Moments
2.3.1 Preliminaries
Our setup consists of a general two-dimensional critically sampled two-channel filter
bank with a valid sampling S that has downsampling ratio 2, i.e., |det S| = 2. Figure 2.4
(a) illustrates such a filter bank. In this setting, given a set of analysis/synthesis filters
the reconstructed signal is a perfect replica of the original provided that [7]
H0(ω)G0(ω) + H1(ω)G1(ω) = 2, (2.4)
H0(ω + 2πS−Tk1)G0(ω) + H1(ω + 2πS−Tk1)G1(ω) = 0, (2.5)
where k1 is the nonzero integer vector in the set N (S) := {ST x, x ∈ [0, 1) × [0, 1)} [7].
The modulation term 2πS−Tk1 is a function of the sampling lattice generated by S [44].
Because | detS| = 2, the vector 2S−Tk1 has integer entries. Thus, the modulation term
2πS−Tk1 has the form 2πS−Tk1 = (m1π, m2π)T , where (m1, m2)T = 2S−Tk1. Moreover,
16

(a) Original (b) Filtered
Figure 2.2 Illustration of line zero moments as an edge annihilator. The piecewisepolynomial image in (a) was filtered with a 2-D filter C(z1, z2) = (1 − z1z2
2)3. The
output image (b) pixels are approximately zero.
since Hi(ω) and Gi(ω) are 2π-periodic functions, the system of equations (2.4-2.5) exists
in only three distinct cases that correspond to when both m1 and m2 are odd, and when
one is odd and the other is even. These cases in turn correspond to three distinct lattices
for sampling by a factor of two in 2-D that are generated, for instance, by 1
S0 =
1 1
1 −1
,S1 =
2 0
0 1
, and S2 =
1 0
0 2
.
The sampling lattice generated by S0 is called the quincunx lattice [45], whereas the
other two are called rectangular lattices. We will consider only the first two cases since
the third can be obtained from the second by swapping the two dimensions. Therefore,
the two cases corresponding to S0 and S1 encompass all possible cases in 2-D. It can
be checked that k1 = (1, 0)T for both S0 and S1 so that 2πS−Tk1 = (−π,−π)T and
2πS−Tk1 = (−π, 2π)T for S0 and S1, respectively.
Throughout the chapter we assume FIR filters. In such cases, using an argument
similar to the one in [6], we can show the synthesis filters are completely determined (up
1All matrix generators of a given lattice are equivalent, up to right multiplication by a unimodularinteger matrix [7]. A square matrix is unimodular if its determinant is equal to one.
17

to a scale factor and a delay) from the pair (H0(ω), G0(ω)) [6] through the relation
H1(ω) = ejωT k1G0(ω + 2πS−Tk1),
G1(ω) = e−jωT k1H0(ω + 2πS−Tk1). (2.6)
As a result, the reconstruction condition reduces to
H0(ω)G0(ω) + H0(ω + 2πS−Tk1)G0(ω + 2πS−Tk1) = 2. (2.7)
The above biorthogonal relation specializes to the orthogonal one when G0(ω) = H0(−ω).
Moreover, we say that G0(ω) is the complementary filter to H0(ω) whenever they satisfy
(2.7).
2.3.2 Two-channel filter banks with DVMs
In general, given the desired direction of the zero moment, the product filter H0(ω)G0(ω)
takes the form
H0(ω)G0(ω) = (1 − ejωT u)LR(ω),
where L denotes the order of the DVM. Substituting this in (2.7) we obtain the design
equation(1 − ejωT u
)LR(ω) +
(1 − ej(ω+2πS−T k1)T u
)LR(ω + 2πS−Tk1) = 2, (2.8)
where R(ω) is the complementary filter to(1 − ejωT u
)L. We always assume that u1 and
u2 are coprime integers. Note that the above relation sets a system of linear equations
which can be solved under certain conditions. Since∣∣det(S−T)
∣∣S=S0 or S1
= 1/2, it follows
that uT 2S−Tk1 is an integer scalar. If uT 2S−Tk1 is even, then a factor (1−ejωT u) exists
in the two left terms of (2.8) in which case an FIR solution is not possible. Consequently,
we see that uT 2S−Tk1 being odd is a necessary condition for solving (2.8). In that case,
(2.8) reduces to(1 − ejωT u
)L
R(ω) +(1 + ejωT u
)L
R(ω + 2πS−Tk1) = 2. (2.9)
Although in principle it is possible to solve (2.8) directly, the following Proposition
simplifies the problem.
18

Proposition 2 Consider the perfect reconstruction equation (2.8) where u has coprime
entries and uT 2S−Tk1 is odd. Then there exists a unimodular integer matrix U such that
if R(ω) solves (2.8) then R(ω) = R(UTω) solves
(1 − ejω1
)LR(ω) +
(1 + ejω1
)LR(ω + 2πS−Tk1) = 2, (2.10)
where S = US. Conversely, if R(ω) is a solution to (2.10) with S given and u as
above, then there exists a matrix U such that R(ω) = R(UTω) is a solution to (2.8) with
S = US.
Proof. We need to construct U so that ej(UT ω)T u = ej(Uu)T ω = ejω1. We then set
U :=
a b
−u2 u1
(2.11)
and choose a, b ∈ Z so that au1 + bu2 = 1. Because u1 and u2 are assumed to be coprime,
such a and b are guaranteed to exist. Since uT 2S−Tk1 is odd, substituting ω #→ UTω
in (2.9) gives (2.10). Conversely, if R(ω) solves (2.10), then set U = U−1 with U as in
(2.11) and substitute ω #→ UTω in (2.10) to get (2.8). !
Remark 1 The fact that U has integer entries and is unimodular implies that it is a
resampling matrix. Hence, the change of variables ω #→ UTω, or equivalently z #→ zU
amounts to a resampling operation of the filter R(z) which can be seen as a rearrange-
ment of the filter coefficients in the 2-D discrete plane. This has the signal processing
interpretation illustrated in Figure 2.3 (in the z-domain). Thus, we see that a filter with
a DVM along a direction other than the horizontal one can be implemented in terms of
a filter with a horizontal DVM plus pre/post resampling operations.
Remark 2 This change of variables can also be done in the filters of a filter bank. We
thus obtain the equivalence shown in Figure 2.4 for a unimodular matrix U and S = US.
The equivalence can be easily checked using multirate identities. The filter bank within
the dotted region in Figure 2.4 (b) is a perfect reconstruction if and only if the filter bank
19

in Figure 2.4 (a) is. Since the equivalence is one-to-one, one can design filter banks with
horizontal DVMs and then, following Proposition 2, obtain filter banks with DVMs in
any direction u such that uT 2S−Tk1 is odd.
Remark 3 Notice that a vertical DVM, i.e., a factor of the form (1 − ejω2)L
could be
obtained similarly, by just exchanging the rows of the matrix U constructed in the proof
above.
x y
(a) H(z) = (1 − zu)LR(z)
↓ U↑ Ux y
(b) H(z) = H(zU) = (1 − z1)L
R(z)
Figure 2.3 Change of variable is equivalent to a pre/post resampling operation plusfiltering with modified filter. (a) Filter with DVM along u. (b) Equivalent filteringstructure with horizontal DVM.
Proposition 2 gives a simpler equation in the sense that a complete characterization
of its solution is possible. Furthermore, with the aid of Proposition 2 we can establish a
sufficient condition for solving (2.8) as the next proposition shows.
Proposition 3 Let uT be an integer vector of coprime integers. Then (2.8) admits an
FIR solution if and only if uT 2S−Tk1 is an odd integer.
Proof. We already discussed necessity. To establish sufficiency, suppose that uT 2S−Tk1
is an odd integer. Using Proposition 2, we can reduce the problem to that of (2.10).
Thus if (2.10) is solvable then we are done. Now consider the modulation shift 2πS−Tk1.
If the first entry of 2πS−Tk1 is an odd multiple of π, then at least a univariate solution
R(ω) = R(ω1) is guaranteed to exist [46]. But because S = US, one can easily check
that the first entry of 2S−Tk1 is 2uTS−T k1, which is odd by assumption. !
If uT 2S−Tk1 is an odd integer we then say that the direction u is admissible for the
sampling matrix S. Proposition 3 asserts that not all DVMs can be obtained for a given
20

↓ S
↓ S ↑ S
↑ SH0(z) G0(z)
H1(z) G1(z)
x x
y0
y1
(a)
↓ U↑ Ux x
y0
y1
H0(zU) G0(zU)
H1(zU) G1(zU)↓ S
↓ S ↑ S
↑ S
(b)
Figure 2.4 Filter banks with DVMs along a fixed arbitrary direction are equivalent to afilter bank with DVMs along the horizontal direction. (a) Filter bank in which the filtershave DVMs along the direction u. (b) The equivalent filter bank with DVMs along thehorizontal direction. Note that U is constructed according to Proposition 2 and S = US.
downsampling matrix S. In particular, for the quincunx lattice generated by S0, we
have that uT 2S−Tk1 = (u1 + u2) so that u is admissible if u1 + u2 is an odd integer,
and similarly for the rectangular lattice generated by S1, uT 2S−Tk1 = u1 so that u is
admissible whenever u1 is odd. For instance, u = (2, 1)T is admissible for S0 but not for
S1, whereas u = (1, 1)T is only admissible for S1.
The aforementioned discussion provides necessary and sufficient conditions for having
one of the branches of the filter bank featuring DVMs. In the context of contourlets (see
Section 2.5) it is desirable to have DVMs in both channels so that the DFB expansion tree
is balanced in the sense that DVMs are present in all frequency channels. Unfortunately,
this is not possible to attain with FIR filters. Likewise, it is neither possible to have
21

different DVMs in the same filter channel. We summarize these assertions in the next
proposition.
Proposition 4 Consider a two-channel 2-D filter bank with FIR filters H0(ω), H1(ω),
G0(ω), and G1(ω), and downsampling matrix S. Let u = (u1, u2)T and v = (v1, v2)T
be two distinct admissible directions. Then the filter bank cannot have the perfect recon-
struction property if one of the following is true:
1. The filter H0(ω) has a factor of (1 − ejωT u) and H1(ω) has factor of (1 − ejωT v)
leaving FIR remainders.
2. One of the filters, say H0(ω), has factors (1−ejωT u) and (1−ejωT v) simultaneously
leaving an FIR remainder.
Proof. 1. If the factor (1 − ejωT u) is in H0(ω), and (1 − ejωT v) in H1(ω), then the
reconstruction condition (2.4) is not satisfied when ejω = (1, 1)T .
2. Suppose H0(ω) has a factor (1 − ejωT u)(1 − ejωT v). Because v is admissible, we
have from Proposition 3 that vT2S−Tk1 is odd. Consequently we have that
(ej(ω+2πS−T k1)
)v
= −ejωT v.
It then follows from (2.6) that G1(ω) has a factor (1 + ejωT v). Consider the system of
equations {1 − ejωT u = 0, 1 + ejωT v = 0}, which is equivalent to
u1 u2
v1 v2
ω1
ω2
=
π
2π
.
Because u and v are distinct we have that u2v1 *= u1v2 which guarantees a solution. It
then follows that H0(ω) and G1(ω) have a common zero, thus violating (2.4). !
The previous proposition shows we can only afford to have DVM in one branch of
the filter bank. In the next section, we present methods for solving the DVM filter bank
design problem in the form of (2.10).
22

2.3.3 Characterization of the product filter
With the aid of Proposition 2 (see also Figure 2.4), in order to design filter banks with
DVMs we need to consider (2.10) with two possible forms for R(ω + 2πS−Tk1), namely
R(ω1+π,ω2) or R(ω1+π,ω2+π), corresponding to the rectangular and quincunx lattices,
respectively. In the z-domain, we equivalently have R(−z1, z2) and R(−z1,−z2). We
denote those two cases collectively as R(−z1, sz2) where s ∈ {1,−1}. It turns out that
a complete characterization of the solution of (2.10) is possible as the next proposition
shows.
Proposition 5 Let s ∈ {1,−1}. An FIR filter R(z1, z2) is the solution to the equation
(1 − z1)LR(z1, z2) + (1 + z1)
LR(−z1, sz2) = 2 (2.12)
if and only if it has the form
R(z1, z2) = RL(z1) + (1 + z1)LRo(z1, z2) (2.13)
with RL(z1) being a univariate solution given explicitly by
RL(z1) =L−1∑
i=0
(L + i − 1
L − 1
)2−(L+i−1)(1 + z1)
i (2.14)
and Ro(z) satisfying
Ro(z1, z2) + Ro(−z1, sz2) = 0. (2.15)
Proof. First, the 1-D complementary filter to (1− z1)L is guaranteed to exist, a conse-
quence of the Bezout theorem for polynomials [46]. Moreover, RL(z1) as in (2.14) is the
1-D minimum degree polynomial that solves (2.12), which can be found by Taylor series
expansion [2]. Furthermore, if Ro(z1, z2) satisfies (2.15), it can be readily checked that
R(z) given in (2.13) solves (2.12).
To prove sufficiency, suppose R(z1, z2) solves (2.12). Let R′(z1, z2) := R(z1, z2) −
RL(z1). Since RL(z1) and R(z1, z2) are both solutions to (2.12) we must have
R′(−z1, sz2)(1 + z1)L = −R′(z1, z2)(1 − z1)
L, (2.16)
23

which implies that R′(z1, z2) = (1+z1)LRo(z1, z2). Now, let z1 *= ±1. Then (2.16) implies
(2.15) and since Ro(z) is an FIR filter, it follows that (2.15) is valid for all z ∈ C2. !
Remark 4 The above proposition is akin to its 1-D counterpart which is used to con-
struct compactly supported wavelets (see e.g., [2]). The distinction occurs in the higher
order term Ro(z1, z2) which now can be any two-dimensional function satisfying (2.15).
This higher order term will make the filter a “truly” 2-D one, meaning a filter with a
nonseparable support. Moreover, the higher order term can be used to control the shape
of the 2-D frequency response.
Remark 5 If L is even, then it is easy to check that
R(z1, z2) = (−2z1)−L/2RL/2
(z1 + z−1
1
2
)
+ (1 + z−11 )LRo(z1, z2) (2.17)
with Ro(z1, z2) satisfying (2.15), also solves (2.12). If in addition Ro(z1, z2) = Ro(z−11 , z−1
2 ),
this solution provides a class of linear-phase biorthogonal filters with DVM in which each
one of the filters in the analysis and synthesis is a degenerate 1-D solution. Thus, this
solution can be seen as a 2-D generalization of the 1-D biorthogonal spline wavelet filters
of [2].
The result also extends to the orthogonal case as the next corollary shows.
Corollary 1 Let s be as in Proposition 5. Consider the orthogonal perfect reconstruction
condition
H0(z1, z2)H0(z−11 , z−1
2 ) + H0(−z1, sz2)H0(−z−11 , sz−1
2 ) = 2,
with H0(z1, z2) = (1 − z1)Lr0(z1, z2). Also set R0(z1, z2) = r0(z1, z2)r0(z−11 , z−1
2 ). Then
R0(z1, z2) has the form
R0(z1, z2) = RL
(z1 + z−1
1
2
)+
(1 +
z1 + z−11
2
)L
R0(z1, z1),
where RL is as in (2.14), and R0(z1, z2) = R0(z−11 , z−1
2 ) satisfies (2.15) .
24
The proof of this corollary is a direct application of Proposition 5 by making the change of
variables z′1 = z1+z−11
2 , and z′2 = z2+z−12
2 . Notice that orthogonal FBs with DVMs could be
obtained using the above result by taking the square root of the filter R0(ω) = |r0(ω)|2.
This requires 2-D spectral factorization, which is a hard task. Furthermore, such a
square root is not guaranteed to exist and one has to carefully select the higher order
term R0(ω) so as to make R0(ω) factorizable. For biorthogonal solutions, one can avoid
spectral factorization using the mapping approach as discussed in the next section.
2.4 Design via Mapping
2.4.1 Design procedure
Due to the lack of a factorization theorem for 2-D polynomials, the design of nonsep-
arable 2-D filter banks is substantially harder than the 1-D counterpart. In particular,
we cannot easily factorize the solution for the product filter given by Proposition 5 into
H0(z) and G0(z) as in (2.7). There are two known ways to avoid factorization: (1)
Constructing the polyphase matrix in a lattice structure and (2) Mapping 1-D filters
to 2-D by appropriate change of variables. Most filters designed in the literature use
one of these two approaches (see, e.g., [32, 47–50].) The first method has the attractive
feature of possible construction of both orthogonal and biorthogonal solutions. How-
ever, it is harder to impose vanishing moments, since the corresponding conditions in the
polyphase domain are nonlinear (see, e.g., [51].) For processing images, orthogonal FBs
have the shortcoming of lack of phase linearity which causes severe visual distortions.
For biorthogonal FIR solutions, one can use the general mapping approach proposed in
[49]. In this approach, we first design 1-D prototype filters H(1D)0 (z), and G(1D)
0 (z), such
that P (1D)(z) := H(1D)0 (z)G(1D)
0 (z) is a halfband filter, i.e.,
P (1D)(z) + P (1D)(−z) = 2. (2.18)
Next, we apply the change of variables z #→ M(z) to map the 1-D filters to 2-D ones:
H0(z) = H(1D)0 (M(z)), G0(z) = G(1D)
0 (M(z)).
25

It can be easily checked that the mapped 2-D filters will satisfy the perfect recon-
struction condition (2.7) provided
M(z1, z2) = −M(−z1, sz2). (2.19)
Notice that for FIR solutions, it is necessary that the 1-D prototype filters have only
positive powers of z. This automatically precludes FIR orthogonal solutions.
Mapping 1-D filters can also be carried over to the polyphase domain as done in [50].
A more careful examination of the filters proposed in [50] reveals that the polyphase
mapping can also be performed in the filter domain, and as such, the technique boils
down to a particular case of the mapping method [52]. For completeness, we include a
derivation of this equivalence in Section 2.8.
In the context of filter banks with DVMs, the goal is to devise a mapping function
M(z) such that each of the 2-D filters H0(z) and G0(z) has a given number of (1 − z1)
factors. In addition we require M(z) so that perfect reconstruction is kept after mapping.
The next proposition shows an explicit form of the required mapping function.
Proposition 6 Let H(1D)0 (z), G(1D)
0 (z) be such that P (1D)(z) = H(1D)0 (z)G(1D)
0 (z) satisfies
(2.18) and let s ∈ {1,−1}. Suppose M(z) is an FIR mapping function such that
M(z1, z2) = (1 − z1)LR(z1, z2) + c0, (2.20)
where c0 is such that H(1D)0 (z) has a factor (z−c0)Na/L, G(1D)
0 (z) has a factor (z−c0)Ns/L,
and R(z1, z2) satisfies the valid mapping equation:
(1 − z1)L R(z1, z2) + (1 + z1)
L R(−z1, sz2) = 2c0. (2.21)
Then
1. The mapped filters H0(z) = H(1D)0 (M(z)) and G0(z) = G(1D)
0 (M(z)) are perfect
reconstruction, i.e., they satisfy
H0(z1, z2)G0(z1, z2) + H0(−z1, sz2)G0(−z1, sz2) = 2. (2.22)
26

2. The mapped filters are factored as
H0(z) = (1 − z1)NaRH0(z), G0(z) = (1 − z1)
NsRG0(z). (2.23)
Proof. Suppose M(z) is as in (2.20). Then, from (2.21) it follows that M(z1, z2) =
−M(−z1, sz2) which is (2.19), hence the mapped filters satisfy (2.22). Moreover, substi-
tuting z #→ M(z) in the factors (z−c0)Na/L of H(1D)0 (z) and (z−c0)Ns/L of G(1D)
0 (z) gives
H0(z) and G0(z) as in (2.23). !
Interestingly, it turns out the valid mapping equation (2.21) is similar to equation
(2.12) for the product filter in Proposition 5. We then can use Proposition 5 to find an
explicit solution to (2.21). In short, we see that the mapping overcomes the need for
spectral factorization and, together with Proposition 5, gives a straightforward design
methodology. Hence, we can formulate the design of DVM filter banks via mapping as
follows.
Problem: Design 2-D filters H(1D)0 (z) and G(1D)
0 (z) satisfying the perfect reconstruction
condition (2.7) and such that H(1D)0 (z) has a factor (1 − z1)Na and G(1D)
0 (z) has factor
(1 − z1)Ns .
Step 1 Design 1-D filters H(1D)0 (z) and G(1D)
0 (z) with Na/L and Ns/L zeros at some
point c0 ∈ C, respectively, and such that P (1D)(z) = H(1D)0 (z)G(1D)
0 (z) satisfies
(2.18).
Step 2 Let M(z) = (1 − z1)LR(z) + c0 with
R(z) = RL(z1) + (1 + z1)LRo(z1, z2), and
Ro(z1, z2) = −Ro(−z1, sz2).
Step 3 Set H0(z) = H(1D)0 (M(z)) and G0(z) = G(1D)
0 (M(z)) to obtain the desired 2-D
filters.
27

Notice that one can choose M(z) so that M(z) = M(z−1) and, as a result, the 2-D
filters are zero-phase [49]. In this case, L is necessarily even and R(z) can have the more
convenient form in (2.17) instead of the one in (2.13). In the design examples that follow
we use c0 = 1. It is easy to check that this ensures the gain of H1(z) at z = (1, z2)T is√
2 whenever H(1D)0 (−1) =
√2.
2.4.2 Filter size analysis
One shortcoming of the mapping design procedure is that the size of the support of the
filters tends to be increasingly large. However, if extra care is taken when designing the
mapping function as well as the 1-D prototypes, the filters can have reasonable support
size. The support of the filters can be easily quantified as we show next. We use the
notation deg [·] to denote the support size of the filter. For a 2-D filter the support size will
be a pair of integers that represent the sides of the smallest discrete square that contains
all the filter coefficients, including the boundary. Thus, since H0(z) = H(1D)0 (M(z)),
G0(z) = G(1D)0 (M(z)), we have that deg [H0(z)] = deg [H(1D)(z)]deg [M(z)] and similarly
deg [G0(z)] = deg [G(1D)(z)]deg [M(z)]. Notice that deg [M(z)] = deg [R(z)] + (L, 0)T .
Moreover, from Proposition 5 we have that R(z1, z2) = RL(z1) + (1 + z1)LRo(z). Since
RL(z1) is the minimum degree complementary filter to (1 − z1)L, it has support size L.
Therefore, if we further assume that Ro(z) is supported around the origin, it follows
that deg [R(z1, z2)] is dominated by deg [(1 + z1)LRo(z)]. Thus, denoting deg [Ro(z)] =
(µ1, µ2)T , we have that
deg [R(z1, z2)] ≤ deg [(1 + z1)LRo(z)] =
L + µ1
µ2
,
and consequently,
deg [H0(z1, z2)] ≤ deg [H(1D)(z)]
µ1 + 2L
µ2
. (2.24)
28

Similarly, for the synthesis filter
deg [G0(z1, z2)] ≤ deg [G(1D)(z)]
µ1 + 2L
µ2
. (2.25)
From the foregoing discussion we see that when µ1 + µ2, by increasing the number
of DVMs in the mapping function, i.e., increasing L, the filter support will be stretched
along the n1 direction. Furthermore, for a fixed mapping function, the support of the
resulting 2-D filter will increase linearly in both n1, n2 directions with the number of
vanishing moments in the prototype filters H(1D)(z). Thus, to avoid the filters being
too large, we point out that the 1-D prototype filters should be as short as possible,
preferably with only one zero at c0. We present design examples next.
2.4.3 Design examples
Example 1 Nonseparable filter family that includes the 1-D 9-7 filters
For the purpose of this example we assume the quincunx lattice and we generate DVMs
along the horizontal direction u1 = 0. Following the discussion in the previous section we
choose the prototype filters H(1D)0 (z) and G(1D)
0 (z) to have zeroes at z = −1. We consider
the minimum degree complementary filter to (1− z)4 which from (2.14) gives the product
filter
P (1D)(z) =1
16(16 − 29z + 20z2 − 5z3)(1 − z)4.
We let each prototype filter have a factor (1 − z)2 and then we split the factor (16 −
29z + 20z2 − 5z3) between the two prototypes assigning the real root to H(1D)0 (z) and the
two complex-conjugate roots to G(1D)0 (z).
In the mapping function we impose the condition M(z1, z2) = M(z−11 , z−1
2 ) so that the
filters are zero-phase. Following (2.20), in order to generate a second-order horizontal
DVM, we set
M(z1, z2) = (1 − z1)2 R(z1, z2) − 1.
29

To guarantee that the map satisfies the valid mapping condition (2.21) and is zero-
phase we use (2.17) to obtain
R(z1, z2) = −z−11
2+(1 + z−1
1
)2Ro(z1, z2).
Notice that Ro(z1, z2) can be any zero-phase filter that satisfies (2.15). For simplicity
we choose Ro(z1, z2) = α(z2 + z−12 ). With α = 0 we recover the 9-7 filters. Figure 2.5
displays the frequency response of the filters when we set α = −4√
2.
(a) |H0(ejω)| (b) |G0(ejω)|
(c) |H1(ejω)| (d) |G1(ejω)|
Figure 2.5 Frequency response of analysis and synthesis filters designed with fourth-order directional vanishing moment. The filters degenerate to the 9-7 wavelet filters.
Example 2 Using the higher order term to improve frequency response
In this example we use the extra degrees of freedom in our proposed design to obtain
filters with low order DVMs and better frequency selectivity. The following filters can be
checked to satisfy (2.18):
H(1D)0 (z) = K
(1 + k2z + k2k3z
2),
G(1D)0 (z) = K−1
(1 − k1z − k3z + k1k2z
2 − k1k2k3z3).
30

To obtain the prototype we choose the constants K, k1, k2, and k3 such that each filter
has a zero at z = −1 and in addition that H(1D)0 (−1) = G(1D)
0 (−1) =√
2. The following
prototypes are obtained:
H(1D)0 (z) =
1
2(1 − z)
(2 + (2 −
√2)z
),
G(1D)0 (z) =
1
2(1 − z)
(2 + (6 − 4
√2)z + (4 − 3
√2)z2
).
We then use the same mapping function of Example 1, but now we let
Ro(z1, z2) = r0
(z1 +
1
z1
)+ r1
(z2 +
1
z2
)
+ r2
(z1 +
1
z1
)(z2 +
1
z2
)2
(2.26)
and optimize the coefficients r0, r1, r2 so that the filters approximate the ideal fan response.
The resulting filters H0(z) and G0(z) have sizes 13 × 9 and 19× 13, respectively. Figure
2.6 displays the frequency response of all the filters.
(a) |H0(ejω)| (b) |G0(ejω)|
(c) |H1(ejω)| (d) |G1(ejω)|
Figure 2.6 Frequency response of analysis and synthesis filters designed with second-order directional vanishing moment.
31

2.5 Tree-Structured Filter Banks with DirectionalVanishing Moments
In order to study the approximation properties of DVM filters we replace the con-
ventional DFB in the contourlet transform with a DFB constructed with fan filter banks
that have DVMs. The DFB is constructed with fan filter banks and pre/post resampling
operations in a tree structure [23]. Referring to the fan-shaped fundamental frequency
support, it is natural to impose vanishing moments along the vertical and horizontal
directions. Notice that there are different ways to impose DVMs in the contourlet trans-
form. For instance, one could consider the Laplacian pyramid in conjunction with the
directional filters to impose DVMs. This is equivalent to considering a 2-D oversampled
filter bank with its highpass channels followed by the DFB. Such a design, however, is
outside the scope of this work.
↓ S0
↓ S0
x
y0
y1
H0(z)
H1(z)
(a) Type 0
↓ S0
↓ S0
x
y0
y1
H0(z)
H1(z)
(b) Type 1
Figure 2.7 Two types of prototype fan filter banks used in the DFB expansion tree.Each filter bank has one of its branches featuring a DVM.
As we already discussed in Proposition 4, for a 2-D, two-channel filter bank, we can
only have DVMs in one of its branches. Thus, for the prototype fan filter bank used
in the DFB, we have the two possible configurations (denoted type 0 and type 1) with
similar frequency decomposition illustrated in Figure 2.7.
In light of that, in each node of the DFB tree structure we use a sheared/rotated
filter bank, according to the DFB expansion rule, obtained from the prototype fan filter
bank of either type 0 or type 1. This naturally opens the question of how to arrange the
filter bank types in the tree structure efficiently. Notice that, for a DFB with l stages,
32

x
y0
y1
y2
y3
↓ S0
↓ S0
↓ S0
↓ S0
↓ S0
↓ S0H0(z)
H1(z)
H0(z)
H1(z)
H0(z)
H1(z)
(a) DFB with DVM filters
x
y3
y2
y1
y0
↓ S0
↓ S0
↓ S0
↓ S0
↓ S0
↓ S0
↓ S0
↓ S0
H0(z)
H1(z)
H0(zS)
H0(zS)
H1(zS)
H1(zS)
(b) Equivalent DFB
Figure 2.8 The DVM directional filter bank. (a) The four-channel DFB with type 0(horizontal) and type 1 (vertical) DVM filter banks. (b) The four-channel equivalentfilter bank. The equivalent filter bank has DVMs in three different directions.
a total of∏l
i=1 2i tree arrangements are possible, each with a different DVM allocation
among the DFB channels. Figure 2.8 illustrates a possible arrangement for a four-channel
DFB. Notice that with type 0 and type 1 prototype fan filter banks we obtain DVMs in
different directions (in this case the two diagonal directions).
For a single node in the DFB tree, the possible DVMs for either type 0 or type 1
fan filter bank to be appended in that node will depend on the overall downsampling
matrix of that particular node. Furthermore, from Proposition 4, we have that each stage
33

3 3
3 3
3 3
1 1
1 1
1 1
1 1
1 1
2
5 5
5
4
6 6
6 6
7
8
6
6 6
3
1
(a) Tree 1
1 1
1 1
1
1
1
1 1
1
1
1
2
3 4
6
2
3
3
4
5
5 5
5
5
5
5
5 5
5
5
6
(b) Tree 2
1
3 1
1
1
1
1
1 1
1
1
1
1
2
2
3
3
3 3
4
4
4
5
6
66
6
4
7
3 1
3
(c) Tree 3
Figure 2.9 Directional vanishing moments on equivalent filters of a 16-channel DFB.Different arrangements of type 0 and type 1 fan filter banks lead to different numbersof distinct directions. Each distinct direction is numbered. (a) Tree 1 has 8 distinctdirections. (b) Tree 2 has 7 distinct directions. (c) Tree 3 has 6 distinct directions.
0 ≤ q ≤ l in the DFB tree introduces DVMs in 2q−1 channels. Heuristically, we observe
that for representing natural images with directional information spread among several
orientations, it is desirable to have the set of distinct DVMs as large as possible. Thus, in
each DFB stage, the goal is to introduce as many “new” DVMs as possible. For instance,
Figure 2.9 displays three possible arrangements for a 24-channel expansion, each with a
different number of distinct directions. It can be verified that the arrangement in Figure
2.9 (a) (Tree 1) yields the maximum number of distinct directions.
We stress that the DVM formulation is a space-domain one. As a result, when
coupled with the DFB tree-structure the DVM filters alone do not ensure the directional
resolution of a DFB with ordinary fan filter. However, if the DVM design also considers
frequency localization such as in Example 2, then the DFB tree structure may have good
localization in the frequency domain. Figure 2.10 shows the equivalent response using
34

the fan filters with DVMs designed in Example 2. Notice that the equivalent filters have
good frequency localization in addition to the DVMs in all but one direction.
Figure 2.10 Equivalent filters in an 8-channel DFB using two-channel filter banks withDVM. The filters are the ones designed in Example 2. Notice the good frequency local-ization in addition to the imposed DVMs (red line).
2.6 Numerical Experiments
2.6.1 Annihilating directional edges
In order to illustrate the potential of the filter banks with DVMs we construct a toy
example using Haar-type filters and bilevel images. That is, we use filters with one DVM
and two nonzero coefficients. As a test image, we use a bilevel polygon image displayed
in Figure 2.11. An efficient representation of the image shown can be obtained in the
following way. Consider an ordinary separable wavelet decomposition with downsampling
along the rows on the first filtering stage. Each level of the line-column wavelet transform
can be seen as a generate 2-D decomposition, where the filters are 1-D. In this case, the
corresponding downsampling matrices for the first and second levels are
1 0
0 2
, and
2 0
0 1
,
35

respectively. The DVM filters in this two-stage filter bank are as follows. On the first
level we use the filter H0(z) = (1−z−11 z−3
2 )/√
2 so that one of the directions is annihilated,
namely the one along the angle θ ≈ 2π/5. Notice that the z1 exponent is odd so, from
Proposition 3, perfect reconstruction is possible. On the second filtering stage we use the
filters H00(z) = (1 − z−11 z3
2)/√
2 in the low-pass branch and H10(z) = (1 − z−21 z2)/
√2 in
the high-pass branch. Using multirate identities [7] we see that the first splitting yields a
DVM along θ ≈ −5π/16 whereas the second yields θ ≈ −6π/77. The frequency response
of both filters used in the experiment is shown in Figure 2.12.
(a) Original (b) Haar (c) DVM
Figure 2.11 Decomposition of synthetic image using two schemes. (a) Original image.(b) Wavelet decomposition. (c) DVM decomposition.
Similar to the ordinary wavelet decomposition, we iterate the filter bank on the low-
pass channel using the same filter bank on each scale. Figure 2.11 shows the four-
scale decomposition. Also shown is the four-level decomposition using Haar filters. As
the pictures show, the DVM filters produce a more efficient decomposition in the sense
that fewer significant coefficients are present. Furthermore, we observe a reduction of
about 50% in the first-order entropy after uniformly quantizing the coefficients in the
two expansions. Note that the DVMs in the expansion closely match the edges in the
image. For general images, we need DVMs along several directions.
36

-2
0
2w2
-2
0
2
w1
00.51
1.52
2.5
-2
0
2w2
(a)
-2
0
2w2
-2
0
2
w1
0
1
2
3
-2
0
2w2
(b)
Figure 2.12 The DVM Haar filters. In (a) the response of the filter H0(z) = (1 −z−11 z−3
2 )/√
2 is shown. Notice the single DVM that is replicated due to periodicity. In(b) we have the response of the other Haar filter H10(z) = (1 − z−2
1 z2)/√
2 also used inthe experiment.
2.6.2 Nonlinear approximation with the contourlet transform
To illustrate the applicability of the directional vanishing moment filters proposed,
we perform an experiment in which we replace the conventional DFB in the contourlet
transform with a DFB built with DVM fan filter banks following the discussion in Section
2.5 (see Figure 2.8). The filters we use are those designed in Example 1. To study
the nonlinear approximation (NLA) behavior of the filters in our proposed design, we
reconstruct the image using the N coefficients with largest magnitude and compute the
resulting PSNR. It is recognized that the faster the asymptotic decay of the NLA error,
the sparser the decomposition. This sparsity is important for potential applications
including denoising and compression [1]. The directional expansion tree we use in each
scale is one that leads to a maximum number of distinct DVMs and is the same for
all test images, hence the expansion is fixed. The analysis filter is zero-phase with 7 ×
13 coefficients and the synthesis with 9 × 17, also zero-phase (see Example 1). As a
comparison, we use the quincunx/fan filters of [50] (PKVA), where the analysis filter has
23 × 23 taps and the synthesis 45 × 45. We observe that the PKVA filters give the best
PSNR performance in the contourlet transform among existing designs in the literature.
37

Figure 2.13 displays the NLA curve obtained for a piecewise polynomial image. For
this synthetic image, a significant improvement is observed. This improvement is due
to the fact that the synthetic image has directional information in a very small set of
directions, which, due to DVMs, are well represented in the expansion.
(a)
10326
28
30
32
34
36
38
40
42
Number of retained coefficients
PSNR
(dB)
DVMPKVAWAVELET
(b) Synthetic
Figure 2.13 Nonlinear approximation behavior of the contourlet transform with DVMfilters for a toy image. (a) Synthetic piecewise polynomial image. (b) NLA curves (on asemilog scale). This simple toy image is better represented by the contourlet transformwith DVM filters.
Figure 2.14 shows the NLA curves for the standard 512×512 “Peppers” and “Barbara”
images. As the plots show, the DVM filters slightly improve over PKVA for both natural
images. For a highly textured image such as “Barbara” there is significant improvement
over wavelets. In contrast, for a smooth image such as “Peppers,” the redundancy
inherent to the contourlet expansion is more apparent. However, when the number of
coefficients is very low, the results are comparable.
Because the DVM filters are considerably shorter, we observe fewer ringing artifacts
when compared against the PKVA filters, even when both give similar PSNR. Figure
2.15 shows the “Peppers” image reconstructed with 2048 coefficients using both of the
filters. As can be seen, the image reconstructed with the DVM filters exhibits many fewer
ringing artifacts. This result is akin to that in the 1-D wavelet case in which subband
filters without vanishing moments produce similar PSNR results, but have more artifacts
due to long filters.
38

103 10422
24
26
28
30
32
34
36
38
Number of retained coefficients
PSNR
(dB)
DVM
PKVA
WAVELET
(a) Peppers
103 10420
22
24
26
28
30
32
34
36
38
Number of retained coefficients
PSNR
(dB)
DVM
PKVA
WAVELET
(b) Barbara
Figure 2.14 Nonlinear approximation behavior of the contourlet transform with DVMfilters for natural images. NLA curves (on a semilog scale) for “Peppers” (a) and “Bar-bara” (b) images.
2.6.3 Image denoising with the contourlet transform
To assess the performance of the DVM filters relative to the conventional approach,
we consider threshold estimators on the contourlet transform domain. Such estimators
are very efficient in removing additive Gaussian noise from images [1]. In our experiment
we consider a hard-threshold applied to the highpass directional subbands. The threshold
is chosen as Tj = KσN,j , where σN,j is the estimated noise standard deviation in that
subband, and K is a constant. We choose K = 3 for the coarse scale and K = 4 for the
finest scale. Table 2.1 shows the PSNR of the denoised images. For comparison purposes
we also include the results obtained with the wavelet transform.2
The DVM filters slightly improve the conventional filters which improves over wavelets.
The improvements are more noticeable in the Barabara image.
2Note that our intent is only to compare the performance of the filters. State-of-the art denoisingmethods often would result in better performance than the ones shown in Table 2.1.
39

(a) PKVA (b) DVM
Figure 2.15 “Peppers” image reconstructed with 2048 coefficients. (a) PKVA filters,PSNR = 26.05 dB (b) DVM filters of Example 1, PSNR = 26.76 dB. The image on theright shows less ringing artifacts.
2.7 Conclusion
We have studied two-channel biorthogonal filter banks in which one filter bank chan-
nel annihilates information along a prescribed direction by means of directional vanishing
moments. We investigated in detail the classes of signals that are annihilated by filters
having DVMs. In addition, we studied the DVM filter bank design problem and provided
a complete characterization of the product filter. The characterization splits the com-
plementary filter into two terms, one minimum order 1-D degenerate filter and a higher
order 2-D term. Using the mapping design methodology, we proposed a design procedure
in which the mapping can be calculated explicitly. Our approach is easy to carry out
and yields a large class of linear-phase 2-D filter banks with DVMs of any prescribed
order. We also investigated the potential usage of such filter banks in the context of the
contourlet transform. Nonlinear approximation curves indicate that filters with DVMs
can be as good as filters designed with frequency response as a primary criteria and,
40

Table 2.1 Improvement in image denoising.
LENA
σ Noisy DWT CT-PKVA CT-DVM10 28.12 32.31 32.08 32.5420 22.10 28.34 28.40 28.8330 18.59 25.80 25.93 26.3540 16.08 23.88 24.04 24.4550 14.14 22.34 22.52 22.96
BARBARA
σ Noisy DWT CT-PKVA CT-DVM10 28.12 29.96 30.18 30.7020 22.11 25.68 26.40 26.8430 18.58 23.30 24.18 24.5740 16.08 21.75 22.50 22.9150 14.15 20.60 21.18 21.60
in some cases, yield better results. In addition, because the filters are short, the Gibbs
phenomenon is considerably reduced.
2.8 The Equivalence Between Ladder and MappingDesigns
We now show that the Nyquist filters proposed by Phoong et al. in [50] can be seen
as a special case of the mapping approach proposed by Tay and Kingsbury [49], and here
extended to handle directional vanishing moments. We present the derivation for the
quincunx lattice – the rectangular lattice case can be similarly handled. First recall the
general form of the 2-D filters obtained in [50]:
H0(z1, z2) =1
2
(z−2N1 + z−1
1 p(z1z−12 )p(z1z2)
)(2.27)
H1(z1, z2) = −p(z1z−12 )p(z1z2)H0(z1, z2) + z−4N+1
1 , (2.28)
where p(z) is usually chosen as a halfband filter. The synthesis lowpass filter is G0(z1, z2) =
−H1(−z1,−z2) and, from the above, it follows that
G0(z1, z2)H0(z1, z2) − G0(−z1,−z2)H0(−z1,−z2) = z−6N+11 .
41

Now, consider the delayed versions of H0(z) and G0(z) given by H0(z1, z2) = z2N1 H0(z1, z2)
and G0(z1, z2) = z4N−11 G0(z1, z2). Then
H0(z1, z2) =1
2
(1 + z2N−1
1 p(z1z−12 )p(z1z2)
)
G0(z1, z2) =1
2
[2 + z2N−1
1 p(z1z−12 )p(z1z2)
×(1 − z2N−1
1 p(z1z−12 )p(z1z2)
)].
The above filters are simply delayed versions of the starting ones, thus being the same fil-
ters for practical purposes. Notice that the filters now satisfy H0(z)G0(z)+H0(z)G0(z) =
2. Setting z := z2N−11 p(z1z
−12 )p(z1z2) in (2.29), we see that the filters can be written in
terms of the 1-D polynomials
H(1D)0 (z) =
1
2(1 + z)
G(1D)0 (z) =
1
2[2 + z (1 − z)] ,
where H(1D)0 (z)G(1D)
0 (z)+H(1D)0 (−z)G(1D)
0 (−z) = 2. Finally note that z2N−11 p(z1z
−12 )p(z1z2)
is odd regardless of the nature of p(z). Hence we have the following result.
Proposition 7 The filters proposed in [50] constitute a particular case of the mapping
design of [49], where the mapping function is M(z1, z2) = z2N−11 p(z1z
−12 )p(z1z2).
42

CHAPTER 3
THE NONSUBSAMPLED CONTOURLETTRANSFORM: THEORY, DESIGN, AND
APPLICATIONS
In this chapter we develop the nonsubsampled contourlet transform (NSCT) and
study its applications. The construction proposed in this chapter is based on a nonsub-
sampled pyramid structure and nonsubsampled directional filter banks. The result is a
flexible multiscale, multidirection, and shift-invariant image decomposition that can be
efficiently implemented via the a trous algorithm. At the core of the proposed scheme is
the nonseparable two-channel nonsubsampled filter bank. We exploit the less stringent
design condition of the nonsubsampled filter bank to design filters that lead to a NSCT
with better frequency selectivity and regularity when compared to the contourlet trans-
form. We propose a design framework based on the mapping approach, that allows for a
fast implementation based on a lifting or ladder structure, and only uses one-dimensional
filtering in some cases. In addition, our design ensures that the corresponding frame
elements are regular, symmetric, and the frame is close to a tight one. We assess the
performance of the NSCT in image denoising. The NSCT compares favorably to other
existing methods in the literature.
This chapter is joint work with Minh Do and Jianping Zhou. The results of this chapter aresummarized in the references [53–55].
43

3.1 Introduction
A number of image processing tasks are efficiently carried out in the domain of an
invertible linear transformation. For example, image compression and denoising are ef-
ficiently done in the wavelet transform domain [1, 8]. An effective transform captures
the essence of a given signal or a family of signals with few basis functions. The set of
basis functions completely characterizes the transform and this set can be redundant or
not, depending on whether the basis functions are linear dependent. By allowing redun-
dancy, it is possible to enrich the set of basis functions so that the representation is more
efficient in capturing some signal behavior. In addition, redundant representations are
generally more flexible and easier to design. In applications such as denoising, enhance-
ment, and contour detection, a redundant representation can significantly outperform a
nonredundant one.
Another important feature of a transform is its stability with respect to shifts of the
input signal. The importance of the shift-invariance property in imaging applications
dates back at least to Daugman [56] and was also advocated by Simoncelli et al. in
[21]. An example that illustrates the importance of shift-invariance is image denoising by
thresholding where the lack of shift-invariance causes pseudo-Gibbs phenomena around
singularities [57]. Thus, most state-of-the-art wavelet denoising algorithms (see for ex-
ample [58–60]) use an expansion with less shift sensitivity than the standard maximally
decimated wavelet decomposition — the most common being the nonsubsampled wavelet
transform (NSWT) computed with the a trous algorithm [61]. 1
In addition to shift-invariance, it has been recognized that an efficient image represen-
tation has to account for the geometrical structure pervasive in natural scenes. In this
direction, several representation schemes have recently been proposed [16, 18–20, 36].
The contourlet transform [20] is a multidirectional and multiscale transform that is con-
structed by combining the Laplacian pyramid [25, 37] with the directional filter bank
1Denoising by thresholding in the NSWT domain can also be realized by denoising multiple circularshifts of the signal with a critically sampled wavelet transform and then averaging the results. This hasbeen termed cycle spinning after [57].
44

(DFB) proposed in [23]. The pyramidal filter bank structure of the contourlet transform
has very little redundancy, which is important for compression applications. However,
designing good filters for the contourlet transfom is a difficult task. In addition, due to
downsamplers and upsamplers present in both the Laplacian pyramid and the DFB, the
contourlet transform is not shift-invariant.
In this chapter we propose an overcomplete transform that we call the nonsubsampled
contourlet transform (NSCT). Our main motivation is to construct a flexible and efficient
transform targeting applications where redundancy is not a major issue (e.g., denoising).
The NSCT is a fully shift-invariant, multiscale, and multidirection expansion that has
a fast implementation. The proposed construction leads to a filter design problem that,
to the best of our knowledge, has not been addressed elsewhere. The design problem
is much less constrained than that of contourlets. This enables us to design filters with
better frequency selectivity, thereby achieving better subband decomposition. Using the
mapping approach we provide a framework for filter design that ensures good frequency
localization in addition to having a fast implementation through ladder steps. The NSCT
has proven to be very efficient in image denoising and image enhancement [53–55].
The chapter is structured as follows. In Section 3.2 we describe the NSCT and its
building blocks. We introduce a pyramid structure that ensures the multiscale feature
of the NSCT and the directional filtering structure based on the DFB. The basic unit in
our construction is the nonsubsampled filter bank (NSFB), which is discussed in Section
3.2. In Section 3.3 we study the issues associated with the NSFB design and implemen-
tation problems. Application of the NSCT in image denoising is discussed in Section 3.4.
Conclusions are drawn in Section 3.5.
Notation: Throughout the chapter, a two-dimensional (2-D) filter is represented by its
z-transform H(z) where z = [z1, z2]T . Evaluated on the unit sphere, a filter is denoted by
H(ejω) where ejω = [ejω1, ejω2]T . If m = [m1, m2]T is a 2-D vector, then zm = zm11 zm2
2 ,
whereas if M is a 2 × 2 matrix, then zM = [zm1, zm2] with m1,m2 the columns of M.
In this chapter we often deal with zero-phase 2-D filters. On the unit sphere, such filters
45

can be written as polynomials in cosω = (cosω1, cosω2)T . We thus write F (x1, x2) for a
zero-phase filter in which x1 and x2 denote cosω1 and cosω2, respectively.
Abbreviations: A number of abbreviations are used throughout the chapter:
NSCT - Nonsubsampled Contourlet Transform.
NSFB - Nonsubsampled Filter Bank.
NSP - Nonsubsampled Pyramid.
NSDFB - Nonsubsampled Directional Filter Bank.
NSWT - Nonsubsampled 2-D Wavelet Transform.
LAS - Local Adaptive Shrinkage.
3.2 Nonsubsampled Contourlets and Filter Banks
3.2.1 The nonsubsampled contourlet transform
Figure 3.1 (a) displays an overview of the proposed NSCT. The structure consists of
a bank of filters that splits the 2-D frequency plane in the subbands illustrated in Figure
3.1(b). Our proposed transform can thus be divided into two shift-invariant parts: (1)
A nonsubsampled pyramid structure that ensures the multiscale property and (2) A
nonsubsampled DFB structure that gives directionality.
3.2.1.1 The nonsubsampled pyramid (NSP)
The multiscale property of the NSCT is obtained from a shift-invariant filtering struc-
ture that achieves a subband decomposition similar to that of the Laplacian pyramid.
This is achieved by using two-channel nonsubsampled 2-D filter banks. Figure 3.2 il-
lustrates the proposed nonsubsampled pyramid (NSP) decomposition with J = 3 stages.
Such expansion is conceptually similar to the 1-D nonsubsampled wavelet transform com-
puted with the a trous algorithm [61] and has J + 1 redundancy, where J denotes the
number of decomposition stages. The ideal passband support of the lowpass filter at
the j-th stage is the region [− π2j ,
π2j ]2. Accordingly, the ideal support of the equivalent
highpass filter is the complement of the lowpass, i.e., the region [− π2j−1 ,
π2j−1 ]2\[− π
2j ,π2j ]2.
46

subband
subbands
directional
Bandpass
subbands
directional
Bandpass
Image
Lowpass
(a)
(π, π)
(−π,−π)
ω1
ω2
(b)
Figure 3.1 The nonsubsampled contourlet transform. (a) Nonsubsampled filter bankstructure that implements the NSCT. (b) The idealized frequency partitioning obtainedwith the proposed structure.
The filters for subsequent stages are obtained by upsampling the filters of the first stage.
This gives the multiscale property without the need for additional filter design. The
proposed structure is thus different from the separable nonsubsampled wavelet transform
(NSWT). In particular, one bandpass image is produced at each stage resulting in J + 1
redundancy. By contrast, the NSWT produces three directional images at each stage
resulting in 3J + 1 redundancy.
H0(z)
H1(z)
H0(z2I)
H1(z2I)
H0(z4I)
H1(z4I)
x
y0
y1
y2
y3
(a)
0 1 2 3
(π, π)
(−π,−π)
ω1
ω2
(b)
Figure 3.2 The proposed nonsubsampled pyramid is a 2-D multiresolution expansionsimilar to the 1-D nonsubsampled wavelet transform. (a) A three-stage pyramid decom-position. The lighter gray regions denote the aliasing caused by upsampling. (b) Thesubbands on the 2-D frequency plane.
47

The 2-D pyramid proposed in [62] is obtained with a similar structure. Specifically,
the NSFB of [62] is built from lowpass filter H0(z). One then sets H1(z) = 1−H0(z), and
the corresponding synthesis filters G0(z) = G1(z) = 1. A similar decomposition can be
obtained by removing the downsamplers and upsamplers in the Laplacian pyramid and
then upsampling the filters accordingly. Those perfect reconstruction systems can be seen
as a particular case of our more general structure. The advantage of our construction is
that it is general and, as a result, better filters can be obtained. In particular, in our
design G0(z) and G1(z) are lowpass and highpass. Thus, they filter certain parts of the
noise spectrum in the processed pyramid coefficients.
3.2.1.2 The nonsubsampled directional filter bank (NSDFB)
The directional filter bank of Bamberger and Smith [23] is constructed by combining
critically sampled two-channel fan filter banks and resampling operations. The result is a
tree-structured filter bank that splits the 2-D frequency plane into directional wedges. A
shift-invariant directional expansion is obtained with a nonsubsampled DFB (NSDFB).
The NSDFB is constructed by eliminating the downsamplers and upsamplers in the DFB.
This is done by switching off the downsamplers/upsamplers in each two-channel filter
bank in the DFB tree structure and upsampling the filters accordingly. This results in a
tree composed of two-channel nonsubsampled filter banks. Figure 3.3 illustrates a four-
channel decomposition. Note that in the second level, the upsampled fan filters Ui(zQ),
i = 0, 1 have checker-board frequency support and, when combined with the filters in
the first level, give the four directional frequency decomposition shown in Figure 3.3.
The synthesis filter bank is obtained similarly. Just like the critically sampled directional
filter bank, all filter banks in the nonsubsampled directional filter bank tree structure are
obtained from a single nonsubsampled filter bank with fan filters (see Figure 3.5 (b)).
Moreover, each filter bank in the NSDFB tree has the same computational complexity
as that of the prototype NSFB.
48

U0(z)
U1(z)
U0(zQ)
U0(zQ)
U1(zQ)
U1(zQ)
x
y0
y1
y2
y3
(a)
0 13
2
(π, π)
(−π,−π)
ω1
ω2
(b)
Figure 3.3 A four-channel nonsubsampled directional filter bank constructed with two-channel fan filter banks. (a) Filtering structure. The equivalent filter in each channel isgiven by Ueq
k (z) = Ui(z)Uj(zQ). (b) Corresponding frequency decomposition.
3.2.1.3 Combining the nonsubsampled pyramid and nonsubsampleddirectional filter bank in the NSCT
The NSCT is constructed by combining the NSP and the NSDFB as shown in Figure
3.1 (a). In constructing the nonsubsampled contourlet transform, care must be taken
when applying the directional filters to the coarser scales of the pyramid. Due to the
tree-structure nature of the NSDFB, the directional response at the lower and upper
frequencies suffers from aliasing, which can be a problem in the upper stages of the
pyramid (see Figure 3.8). This is illustrated in Figure 3.4 (a), where the passband region
of the directional filter is labeled as “Good” or “Bad.” Thus we see that for coarser
scales, the highpass channel in effect is filtered with the bad portion of the directional
filter passband. This results in severe aliasing and in some observed cases a considerable
loss of directional resolution.
We remedy this by judiciously upsampling the NSDFB filters. Denote the k-th direc-
tional filter by Uk(z). Then for higher scales, we substitute Uk(z2mI) for Uk(z), where m is
chosen to ensure that the good part of the response overlaps with the pyramid passband.
Figure 3.4 (b) illustrates a typical example. Note that this modification preserves perfect
49
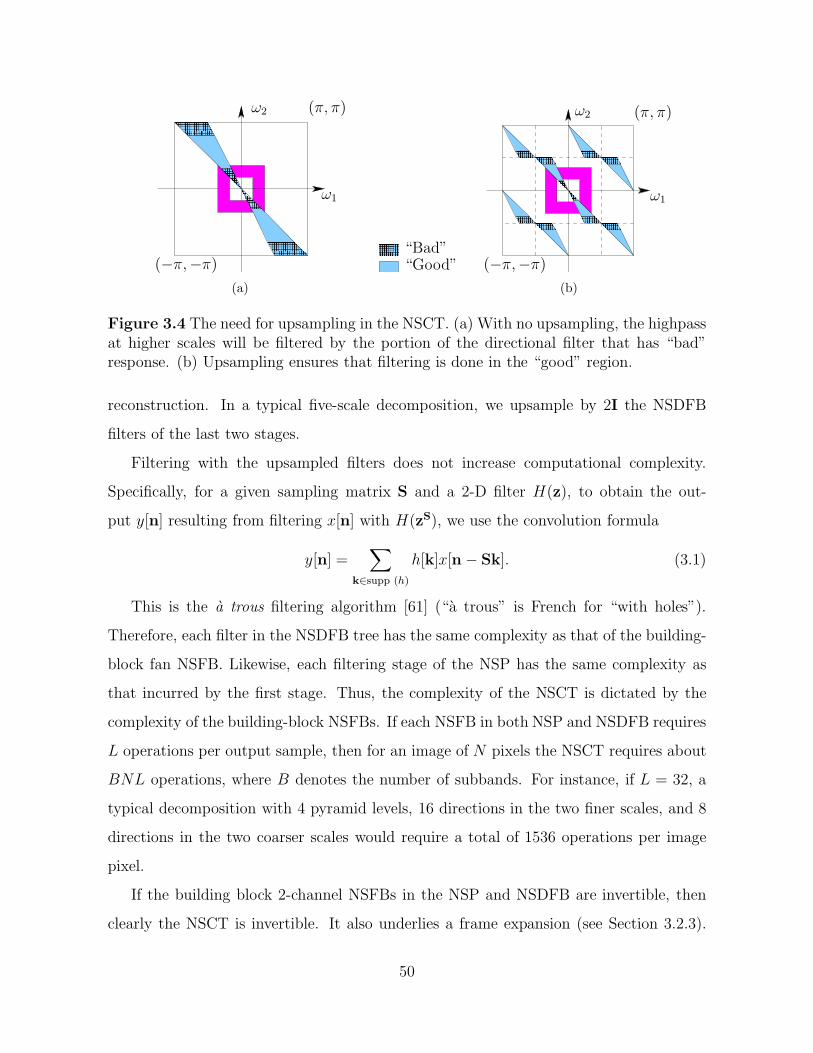
(π, π)
(−π,−π)
ω1
ω2
(a)
“Good”“Bad”
(π, π)
(−π,−π)
ω1
ω2
(b)
Figure 3.4 The need for upsampling in the NSCT. (a) With no upsampling, the highpassat higher scales will be filtered by the portion of the directional filter that has “bad”response. (b) Upsampling ensures that filtering is done in the “good” region.
reconstruction. In a typical five-scale decomposition, we upsample by 2I the NSDFB
filters of the last two stages.
Filtering with the upsampled filters does not increase computational complexity.
Specifically, for a given sampling matrix S and a 2-D filter H(z), to obtain the out-
put y[n] resulting from filtering x[n] with H(zS), we use the convolution formula
y[n] =∑
k∈supp (h)
h[k]x[n − Sk]. (3.1)
This is the a trous filtering algorithm [61] (“a trous” is French for “with holes”).
Therefore, each filter in the NSDFB tree has the same complexity as that of the building-
block fan NSFB. Likewise, each filtering stage of the NSP has the same complexity as
that incurred by the first stage. Thus, the complexity of the NSCT is dictated by the
complexity of the building-block NSFBs. If each NSFB in both NSP and NSDFB requires
L operations per output sample, then for an image of N pixels the NSCT requires about
BNL operations, where B denotes the number of subbands. For instance, if L = 32, a
typical decomposition with 4 pyramid levels, 16 directions in the two finer scales, and 8
directions in the two coarser scales would require a total of 1536 operations per image
pixel.
If the building block 2-channel NSFBs in the NSP and NSDFB are invertible, then
clearly the NSCT is invertible. It also underlies a frame expansion (see Section 3.2.3).
50

The frame elements are localized in space and oriented along a discrete set of directions.
The NSCT is flexible in that it allows any number of 2l directions in each scale. In
particular, it can satisfy the anisotropic scaling law — a key property in establishing
the expansion nonlinear approximation behavior [20, 36]. This property is ensured by
doubling the number of directions in the NSDFB expansion at every other scale. The
NSCT has redundancy given by 1 +∑J
j=1 2lj , where lj denotes the number of levels in
the NSDFB at the j-th scale.
3.2.2 Nonsubsampled filter banks
At the core of the proposed NSCT structure is the 2-D two-channel nonsubsampled
filter bank. Shown in Figure 3.5 are the NSFBs needed to construct the NSCT. In this
chapter we focus exclusively on the FIR case simply because it is easier to implement
in multiple dimensions. For a general FIR two-channel NSFB, perfect reconstruction is
achieved provided the filters satisfy the Bezout identity:
H0(z)G0(z) + H1(z)G1(z) = 1. (3.2)
The Bezout identity puts no constraint on the frequency response of the filters in-
volved. Therefore, to obtain good solutions one has to impose additional conditions on
the filters.
+
H0(z)
H1(z)
G0(z)
G1(z)
x x
y0
y1
(a)
+x x
y0
y1
U0(z)
U1(z)
V0(z)
V1(z)(b)
Figure 3.5 The two-channel nonsubsampled filter banks used in the NSCT. The systemis two times redundant and the reconstruction is error free when the filters satisfy Bezout’sidentity. (a) Pyramid NSFB. (b) Fan NSFB.
51

3.2.3 Frame analysis of the NSCT
The nonsubsampled filter bank can be interpreted in terms of analysis/synthesis op-
erators of frame systems. A family of vectors {φn}n∈Γ constitute a frame for a Hilbert
space H if there exist two positive constants A, B such that for each x ∈ H we have
A‖x‖2 ≤∑
n∈Γ
|〈x,φn〉|2 ≤ B‖x‖2. (3.3)
In the event that A = B the frame is said to be tight. The frame bounds are the tightest
positive constants satisfying (3.3).
Consider the NSFB of Figure 3.5 (a). The family {h0[·−n], h1[·− n]}n∈Z2 is a frame
for *2(Z2) if and only if there exist constants 0 < A ≤ B < ∞ such that [12]
A ≤ |H0(ejω)|2 + |H1(e
jω)|2︸ ︷︷ ︸t(ejω )
≤ B. (3.4)
Thus, the frame bounds of an NSFB can be computed by
A = ess. infω∈[−π,π]2
t(ejω), B = ess. supω∈[−π,π]2
t(ejω), (3.5)
where ess. inf and ess. sup denote the essential infimum and essential supremum, respec-
tively. From (3.4), we see that the frame is tight whenever t(ejω) is almost everywhere
constant. For FIR filters, this means that H0(z)H0(z−1) + H1(z)H1(z−1) = c. Such a
condition can only be met with linear phase FIR filters if H0(z) and H1(z) are either
trivial delays or combinations of two delays (for a formal proof, see [7] pp. 337-338 or
[43]).
Because the NSFB is redundant, an infinite number of inverses exist. Among them,
the pseudo-inverse is optimal in the least square sense [1]. Given a frame of analysis
filters, the synthesis filters corresponding to the frame pseudo-inverse are given by Gi(z) =
Hi(z)/t(z) for i = 0, 1 [12]. In this case, the synthesis filters form the dual frame with
lower and upper frame bounds given by B−1 and A−1, respectively. When the analysis
filters are FIR, then unless the frame is tight, the synthesis filters of the pseudo-inverse
will be IIR.
52

From the above discussion we gather two important points: (1) linear phase filters
and tight frames are mutually exclusive; (2) the pseudo-inverse is desirable, but is IIR if
the frame is not tight. Consequently, an FIR NSFB system with linear phase filters and
with synthesis filters corresponding to the pseudo-inverse is not possible. However, we
can approximate the pseudo-inverse with FIR filters. For a given number of filter taps,
the closer the frame is to being tight, the better an FIR approximation of the pseudo-
inverse can be [13]. Thus, in the designs of the filters we seek linear phase filters that
underly a frame that is as close to a tight one as possible.
In a general FIR perfect reconstruction NSFB system both analysis and synthesis
filters form a frame. If we denote the analysis and synthesis frame bounds by Aa, Ba and
As, Bs, respectively, the frames will be close to tight provided [13]
ra := Aa/Ba ≈ 1, and rs := As/Bs ≈ 1.
We always assume that the filters are normalized so that we have Aa ≤ 1 ≤ Ba. In
case the pseudo-inverse is used, then we also have As ≤ 1 ≤ Bs. The following result
shows the NSCT is a frame operator for *2(Z2) whenever each constituent NSFB forms
a frame.
Proposition 8 In the nonsubsampled contourlet transform, if the pyramid filter bank
constitutes a frame with frame bounds Ap and Bp, and the fan filters constitute a frame
with frame bounds Aq and Bq, then the NSCT is a frame with bounds A and B satisfying
AJpAmin {lj}
q ≤ A ≤ B ≤ BJp Bmax {lj}
q
Proof. Consider the pyramid shown in Figure 3.2 (a). If J = 1, then we have that
‖y0‖2 + ‖y1‖2 ≤ Bp‖x‖2. Now, suppose we have J levels and assume∑J
j=0 ‖yi‖2 ≤
53

BJp ‖x‖2. Then if we further split yJ into y′
J and yJ+1, noting that Bp ≥ 1 we have that
J−1∑
j=0
‖yj‖2 + ‖y′J‖2 + ‖yJ+1‖2 ≤
J−1∑
j=0
‖yj‖2 + Bp‖yJ‖2
≤ Bp
(J−1∑
j=0
‖yj‖2 + ‖yJ‖2
)
≤ BJ+1p ‖x‖2.
Thus, by induction we conclude that∑J
j=0 ‖yi‖2 ≤ BJp ‖x‖2 for any J ≥ 1. A similar
argument shows that in the NSDFB with lj stages, one has that∑2lj−1
k=0 ‖yj,k‖2 ≤ Bljq ‖yj‖2
so that
‖yJ‖2 +J−1∑
j=0
2lj−1∑
k=0
‖yj,k‖2 ≤ ‖yJ‖2 +J−1∑
j=0
Bljq ‖yj‖2
≤ ‖yJ‖2 + Bmax {lj}q
J−1∑
j=0
‖yj‖2
≤ BJBmax {lj}q ‖x‖2.
The bound for A is proved similarly, by just reversing the inequalities. !
Remark 6 When both the pyramid and fan filter banks form tight frames with bound
1, then Ap = Aq = Bp = Bq = 1, and from the above proposition, the nonsubsampled
contourlet transform is also a tight frame with bound 1.
The above estimates on A and B can be accurate in some cases, especially when the
frame is close to a tight one and the number of levels is small (e.g., J = 4). In general,
however, they are not accurate estimates. Their purpose is more of giving an interval for
the frame bounds rather than the actual values. Table 3.1 shows estimates for different
numbers of scales. The actual frame bound is computed from (3.4 - 3.5), whereas the
estimates are the ones given according to Proposition 8.
54

Table 3.1 Frame bounds evolving with scale for the pyramid filters given in Example 3in Section 3.3.
J A actual A estimated B actual B estimated1 0.9586 0.9596 1.0435 1.04352 0.9393 0.9189 1.0504 1.08893 0.9332 0.8808 1.0515 1.13624 0.9316 0.8444 1.0517 1.1857
3.3 Filter Design and Implementation
The filter design problem of the NSCT comprises the two basic NSFBs displayed in
Figure 3.5. The goal is to design the filters imposing the Bezout identity (i.e., perfect
reconstruction) and enforcing other properties such as sharp frequency response, easy
implementation, regularity of the frame elements, and tightness of the corresponding
frames. It is also desirable that the filters are linear-phase.
Two-channel 1-D NSFBs that underlie tight frames are designed in [12]. However, the
design methodology of [12] is not easy to extend to 2-D designs since it relies on spectral
factorization, which is hard in 2-D. If we relax the tightness constraint, then the design
becomes more flexible. In addition, as we alluded to earlier, nontight filters can be linear
phase.
An effective and simple way to design 2-D filters is the mapping approach first pro-
posed by McClellan [63] in the context of digital filters and then used by several authors
[34, 43, 49, 50] in the context of filter banks. In this approach, the 2-D filters are obtained
from 1-D ones. In the context of NSFBs, a set of perfect reconstruction 2-D filters is
obtained in the following way:
Step 1. Construct a set of 1-D polynomials {H(1D)i (x), G(1D)
i (x)}i=0,1 that satisfies the
Bezout identity.
Step 2. Given a 2-D FIR filter f(z), then {H(1D)i (f(z)), G(1D)
i (f(z))}i=0,1 are 2-D filters
satisfying the Bezout identity.
Thus, one has to design the set of 1-D filters and the mapping function f(z) so that
the ideal responses are well approximated with a small number of filter coefficients. In
55

the mapping approach, one can control the frequency and phase responses through the
mapping function. Moreover, if the mapping function is zero-phase, then f(z) = f(z−1)
and it follows that the mapped filters are also zero-phase. In this case, on the unit
sphere, the mapping function is a 2-D polynomial in (cosω1, cosω2). We thus denote it
by F (x1, x2), where it is implicit that f(ejω) = F (cosω1, cosω2).
x xQ(1D)(f(z)) Q(1D)(f(z)) P (1D)(f(z))P (1D)(f(z))
Figure 3.6 Lifting structure for the nonsubsampled filter bank designed with the map-ping approach. The 1-D prototype is factored with the Euclidean algorithm. The 2-Dfilters are obtained by replacing x #→ f(z).
3.3.1 Implementation through lifting
Filters designed with the mapping approach can be efficiently factored into a ladder
[64] or lifting [65] structure that simplifies computations. To see this, assume without loss
of generality that the degree of the highpass prototype polynomial H(1D)1 (x) is smaller
than that of H(1D)0 (x). Suppose also that there are synthesis filters G(1D)
0 (x) and G(1D)1 (x)
such that the Bezout identity is satisfied. In this case it follows that gcd{H(1D)0 , H(1D)
1 } =
1. The Euclidean algorithm then enables us to factor the filters in the following way
[64–66]:
H(1D)0 (x)
H(1D)1 (x)
=N∏
i=0
1 0
P (1D)i (x) 1
1 Q(1D)i (x)
0 1
1
0
. (3.6)
As a result, we can obtain a 2-D factorization by replacing x with f(z). This factor-
ization characterizes every 2-D NSFB derived from 1-D through the mapping method.
Figure 3.6 illustrates the ladder structure with one stage.
In general, the lifting implementation at least halves the number of multiplications
and additions of the direct form [65]. The complexity can be reduced further if the lifting
56

steps in the 1-D prototype are monomials and the mapping filter f(z) has the form
f(z) = f1(zp11 zp2
2 )f2(zq11 zq2
2 ) (3.7)
for suitable f1(z), f2(z), and integers p1, p2, q1, q2. Note that if f(z) is a 1-D filter, then the
2-D filter f(zp1z
q2) for integers p and q has the same complexity as that of f(z). Therefore,
filters of the form in (3.7) have the same complexity as that of separable filters (i.e., filters
of the form f(z) = f(z1)f(z2) ) which amounts to two 1-D filtering operations. Notice
that if f(z) is as in (3.7), then for an arbitrary sampling matrix S, f(zS) also has the form
in (3.20). Consequently, all NSFBs in the NSDFB tree structure can be implemented
with 1-D operations whenever the prototype fan NSFB can be implemented with 1-D
filtering operations. The same reasoning applies to the NSFBs of the NSP.
3.3.2 Pyramid filter design
In the pyramid case, we impose line zeros at ω = (π,ω2) and ω = (ω1, π). Notice
that an N -th order line zero at ω = (π,ω2), for example, amounts to a (1 + ejω1)N
factor in the low pass filter. Such zeros are useful to obtain good approximation of the
ideal frequency response of Figure 3.5, in addition to imposing regularity of the scaling
function. We point out that for the approximation of smooth Cα images, 1 + 2α3 point
zeros at (±π,±π) would suffice [67]. However, our experience shows that point zeros alone
do not guarantee a “reasonable” frequency response of the pyramid filters. The following
proposition characterizes the mapping function that generates zeros in the resulting 2-D
filters.
Proposition 9 Let G(1D)(z) be a polynomial with roots {zi}ni=1 where each zi has multi-
plicity ni. Suppose we want a mapping function F (x1, x2) such that
G(1D) (F (x1, x2)) = (x1 − c)N1 (x2 − d)N2 L(x1, x2), (3.8)
where L(x1, x2) is a bivariate polynomial. Then G(1D)(F (x1, x2)) has the form in (3.8) if
and only if F (x1, x2) takes the form
F (x1, x2) = zj + (x1 − c)N ′
1 (x2 − d)N ′
2 LF (x1, x2), (3.9)
57

for some root zj ∈ {zi}ni=1, where LF (x1, x2) is a bivariate polynomial, and N ′
1, N′2 are
such that N ′1ni ≥ N1 and N ′
2nj ≥ N2.
Proof.
We prove the claim for the case in which the zeros of G(1D)(z) are distinct. The proof
for the case of repeated roots can be handled similarly.
Denote
G(1D)(z) = g0
n∏
i=1
(z − zi), g0 ∈ C. (3.10)
Then sufficiency follows by direct substitution of (3.9) in (3.10).
We prove necessity by induction. Suppose G(1D)(F (x1, x2)) = (x1 − c)N1L(x1, x2)
for some polynomial L(x1, x2). Note that G(1D)(F (c, x2)) = 0 for all x2 if and only if
F (c, x2) = zj for all x2 and some zero zj of G(1D)(z). So, it follows that
(F (x1, x2) − zj)x1=c = 0 for all x2, (3.11)
which implies that F (x1, x2) = zj + (x1 − c)L1(x1, x2) with L1(x1, x2) a polynomial.
Suppose
F (x1, x2) = zj + (x1 − c)k−1Lk−1(x1, x2),
where k ≤ N1. By successively applying the chain rule for differentiation we get that
0 =∂k−1G(1D)(F (x1, x2))
∂xk−11
∣∣∣∣x1=c
= G(1D)′(F (c, x2))∂k−1F (x1, x2)
∂xk−11
∣∣∣∣x1=c
.
Because F (c, x2) = zj and the zj ’s are distinct, we have that G(1D)′(F (c, x2)) *= 0 and
then
∂k−1F (x1, x2)
∂xk−11
∣∣∣∣x1=c
= 0
⇒ ∂k−1F (x1, x2)
∂xk−11
= (x1 − c)L1(x1, x2) (3.12)
⇒ ∂F (x1, x2)
∂x1= (x1 − c)k−1Lk−1(x1, x2), (3.13)
58

where (3.13) follows by successively integrating (3.12). Combining (3.13) with (3.11) we
obtain that F (x1, x2) = zj + (x1 − c)kLk(x1, x2). By induction we conclude that
F (x1, x2) = zj + (x1 − c)N1LN1(x1, x2).
If G(1D)(F (x1, x2)) = (x2−d)N2L(x1, x2) for some polynomial L(x1, x2), then a similar
argument shows that
F (x1, x2) = zi + (x2 − d)N2LN2(x1, x2),
where zi is a zero of G(1D)(z). Thus,
zi − zj = (x1 − c)N1LN1(x1, x2) − (x2 − d)N2LN2(x1, x2),
and hence we have zj = zi. Therefore,
(x1 − c)N1LN1(x1, x2) = (x2 − d)N2LN2(x1, x2),
and so
LN1(x1, x2) = (x2 − d)N2LF (x1, x2),
and (3.9) is established with N ′1 = N1 and N ′
2 = N2. !
The above result holds in general, even for point zeros (as opposed to line zeros as in
Proposition 9). We will explore this extensively in the designs that follow.
Suppose the prototype filters H(1D)0 (x), G(1D)
0 (x) each have zeros at x = −1. Then, in
order to produce a suitable zero-phase mapping function for the pyramid NSFB, we
consider the class of maximally flat filters given by the polynomials [2]
PN,L(x) :=
(1 + x
2
)N L−1−N∑
l=0
(N + l − 1
l
)(1 − x
2
)l
, (3.14)
where N controls the degree of flatness at x = −1 and L controls the degree flatness at
x = 1. Following Proposition 9, we can construct a family of mapping functions as
F (x1, x2) = −1 + 2PN0,L0(x1)PN1,L1(x2) (3.15)
so that zero moments at x1 = −1 and x2 = −1 are guaranteed. Note that, except for
the constant −1, F (x1, x2) has the form of (3.7) and hence can be implemented with 1-D
filtering operations only.
59

Table 3.2 Maximally flat mapping polynomials used in the design of the nonsubsampledfan filter bank.
N FN(x1, x2)
1 12(x1 + x2)
2 14(x1 + x2)(3 − x1x2)
3 116(x1 + x2)(15 − x2
1 − 8x1x2 − x22 + 3x2
1x22)
4 132(x1 + x2)(35 − 5x2
1 − 25x1x2 + 3x31x2 − 5x2
2 + 15x21x
22 + 3x1x3
2 − 5x31x
32)
5 1256(x1 + x2) (315 − 70x2
1 + 3x41 − 280x1x2 + 72x3
1x2 − 70x22 + 228x2
1x22
−30x41x
22 + 72x1x3
2 − 120x31x
32 + 3x4
2 − 30x21x
42 + 35x4
1x42)
3.3.3 Fan filter design
To design the fan filters idealized in Figure 3.5(b) we use the same methodology as
in the pyramid case. The distinction occurs in the mapping function. The fan-shaped
response can be obtained from a diamond-shaped response by simple modulation in one
of the frequency variables. This modulation preserves the perfect reconstruction prop-
erty. A useful family of mapping functions for the diamond-shaped response is obtained
by imposing flatness around ω = (±π,±π) and ω = (0, 0) in addition to point zeros at
(±π,±π). If the mapping function is zero-phase, this amounts to imposing flatness in a
polynomial at (x1, x2) = (−1,−1) and (x1, x2) = (1, 1), and zeros at (x1, x2) = (−1,−1).
Mapping functions satisfying these desiderata with minimum number of polynomial co-
efficients are given by
FN(x1, x2) = −1 + QN (x1, x2), (3.16)
where the polynomials QN (x1, x2) give the class of maximally flat half-band filters with
diamond support. A closed-form expression for QN (x1, x2) is given in [68]. Table 3.2
displays the first six mapping functions FN(x1, x2) for the diamond filter bank.
We point out that diamond maximally flat mapping polynomials can be generated
from 1-D ones by a separable product and then an appropriate change of variables. In
this case the mapping function is separable and has the form f(z) = f1(z1z2)f2(z1z−12 ).
This has been done for instance in [50]. However, the nonseparable solution is generally
shorter (roughly by a factor of 2) while yielding the same number of zeros at the aliasing
60

frequencies and a similar frequency response. For faster implementation, one may choose
the longer mapping filters which can be implemented with 1-D filtering operations.
3.3.4 Design examples
The design through mapping is based on a set of 1-D polynomials that satisfies the
Bezout identity, that is, H(1D)0 (x)G(1D)
0 (x) + H(1D)1 (x)G(1D)
1 (x) = 1. The design can be
simplified if we impose the restriction that
H(1D)1 (x) = G(1D)
0 (−x)and G(1D)1 (x) = H(1D)
0 (−x).
One advantage of this choice is that the frequency response of the filters can be controlled
by the lowpass branch — the highpass will automatically have the complementary re-
sponse. Another advantage is that, under an additional condition, the frame bounds of
the analysis and synthesis frames are the same and can be computed from the 1-D proto-
types. To see this, suppose that f is the mapping function and that Ran(f) = Ran(−f)
with Ran(f) denoting the range of the mapping function f . Then we have that
Aa = infω∈[π,π]2
|H(1D)0 (f(ejω))|2 + |G(1D)
0 (−f(ejω))|2
= infx∈Ran(f)
|H(1D)0 (x)|2 + |G(1D)
0 (−x)|2
= infx∈Ran(−f)
|H(1D)0 (−x)|2 + |G(1D)
0 (x)|2
= infx∈Ran(f)
|H(1D)0 (−x)|2 + |G(1D)
0 (x)|2
= As. (3.17)
A similar argument shows that
Ba = Bs = supx∈Ran(f)
|H(1D)0 (−x)|2 + |G(1D)
0 (x)|2. (3.18)
Example 3 ( Pyramid filters very close to tight ones ) In order to get filters that
are almost tight, we design the prototypes H(1D)0 (x) and G(1D)
0 (x) to be very close to each
other. If we let H(1D)1 (x) = G(1D)
0 (−x) and G(1D)1 (x) = H(1D)
0 (−x), then the following
61

filters can be checked to satisfy the Bezout identity:
H(1D)0 (x) = K
(1 + k2x + k2k3x
2),
G(1D)0 (x) = K−1
(1 − k1x − k3x + k1k2x
2 − k1k2k3x3).
To obtain the prototype we choose the constants K, k1, k2, and k3 such that each filter has
a zero at z = −1 and in addition that H(1D)0 (−1) = G(1D)
0 (−1) =√
2. We obtain
H(1D)0 (x) =
1
2(x + 1)
(√2 + (1 −
√2)x
),
G(1D)0 (x) =
1
2(x + 1)
(√2 + (4 − 3
√2)x + (2
√2 − 3)x2
).
The lifting factorization of the prototype filters is given by
H(1D)0 (x)
H(1D)1 (x)
=
1 αx
0 1
1 0
βx 1
1 γx
0 1
K1
K2
(3.19)
with
α = γ = 1 −√
2, β =1√2, K1 = K2 =
1√2.
Notice that this implementation has 4 multiplies/sample whereas the direct form has
7 multiplies/sample. In this example we set F (x1, x2) = −1+2P2,4(x)P2,4(y) so that each
of the filters has a fourth-order zero at ω1 = ±π and at ω2 = ±π. Since the ladder steps
are monomials, the NSFB can be implemented with 1-D filtering operations. The frame
bounds are computed using (3.17-3.18):
Aa = As = 0.96, Ba = Bs = 1.04.
Thus we have ra = rs = 1.083 and the frame is almost tight. The support size of H0(z)
is 13× 13, whereas G0(z) has support size 19× 19. Figure 3.7 shows the response of the
resulting filters.
Example 4 (Maximally flat fan filters) Using the prototype filters of Example 3, we
modulate a maximally flat diamond mapping function to obtain the maximally flat fan
mapping function. Thus we choose FN (x1, x2) in Table 3.2 with N = 3. We use the
62

-2
0
2-2
0
2
00.250.5
0.75
1
-2
0
2
(a) |H0(ejω)|
-2
0
2-2
0
2
00.250.5
0.75
1
-2
0
2
(b) |G0(ejω)|
-2
0
2-2
0
2
00.250.5
0.75
1
-2
0
2
(c) |H1(ejω)|
-2
0
2-2
0
2
00.250.5
0.75
1
-2
0
2
(d) |G1(ejω)|
Figure 3.7 Magnitude response of the filters designed in Example 3 with maximallyflat filters. The nonsubsampled pyramid filter bank underlies almost tight analysis andsynthesis frames.
lifting factorization of the previous example. The diamond filters obtained have vanishing
moments on the corner points (±π,±π). Figure 3.8 shows the magnitude response of the
filters. The support size of U0(z) is 21× 21, whereas the support size of V0(z) is 31× 31.
3.3.5 Regularity of the NSCT basis functions
The regularity of the NSCT basis functions can be controlled by the NSP low-pass
filters. Denoting by H0(ω) the scaling lowpass filter used in the pyramid (we write H0(ω)
instead of H0(ejω) for convenience), we have the associated scaling function
Φ(ω) :=∞∏
j=1
H0(2−j
ω),
63

-2
0
2-2
0
2
00.250.5
0.75
1
-2
0
2
(a) |U0(ejω)|
-2
0
2-2
0
2
00.250.5
0.75
1
-2
0
2
(b) |V0(ejω)|
-2
0
2-2
0
2
00.250.5
0.75
1
-2
0
2
(c) |U1(ejω)|
-2
0
2-2
0
2
00.250.5
0.75
1
-2
0
2
(d) |V1(ejω)|
Figure 3.8 Fan filters designed with prototype filters of Example 3 and diamond maxi-mally flat mapping filters.
where convergence is in the weak sense. In our proposed design the filter H0(ω) can be
factored as
H0(ω) =
(1 + ejω1
2
)N1(
1 + ejω2
2
)N2
RH0(ω). (3.20)
Notice that the remainder filter RH0(ω) is not separable. Therefore, one cannot separate
the regularity estimation as two 1-D problems. Nonetheless, a similar argument can be
developed and an estimate of the 2-D regularity of the scaling filter is obtained.
Proposition 10 Let H0(ω) be a scaling filter as in (3.20) with the corresponding scaling
function Φ(ω). Let
B = supω∈[π,π]2
|RH0(ω)|.
Then
|Φ(ω)| ≤ C
(1
1 + |ω1|
)N1−log2 B ( 1
1 + |ω2|
)N2−log2 B
.
64

Proof. The proof follows the same lines as for the 1-D case (see e.g., [1, p. 245]). Using
the identity∞∏
k=1
(1 + ej 2−kω
2
)N
=
(1 + ejω
ω
)N
we have that
Φ(ω) =
(1 + ejω1
ω1
)N1(
1 + ejω2
ω2
)N2 ∞∏
j=1
R0(2−j
ω).
Because H0 is continuously differentiable at ω = 0, the same also holds for R0. Now
write R0 in polar coordinates (r,ϕ) where r2 = |ω1|2 + |ω2|2. Since R0 is continuously
differentiable, for each ϕ, R0(r,ϕ) is a continuously differentiable function of r. Since
R0(0) = 1, from the mean value theorem we have that for ε > 0, and 0 ≤ r < ε,
|R(r,ϕ)| ≤ 1 + |∂rR(ρ,ϕ)| r ≤ 1 + Kr
where K := sup{|R(ρ,ϕ)| : 0 ≤ ρ < ε, ϕ ∈ [0, 2π]} < ∞. This gives
0 ≤ r < ε =⇒∞∏
j=1
R0(2−j
ω) ≤∞∏
j=1
(1 + K2−jr) ≤ eKε,
where we have used the inequality 1 + r ≤ er. Now choose J so that 2J−1ε ≤ r ≤ 2Jε.
We then obtain, for r > ε,
∞∏
j=1
|R0(2−j
ω)| =J∏
j=1
|R0(2−j
ω)|∞∏
j=1
|R0(2−j−J
ω)| ≤ BJeKε ≤ C1rlog2 BeKε
so that for each ω ∈ R2,
∞∏
j=1
R0(2−j
ω) ≤ eKε(1 + C1r
log2 B)
= eKε(1 + C1(|ω1|2 + |ω2|2)
12 log2 B
).
Now, putting all together we obtain
|Φ(ω)| ≤ C21
|ω1|N1
1
|ω2|N2
(1 + C1(|ω1|2 + |ω2|2)
12 log2 B
)
≤ C3
(1
1 + |ω1|
)N1−log2 B ( 1
1 + |ω2|
)N2−log2 B
,
65

which completes the proof. !
As an example, consider the prototype filter in Example 3 and the mapping F (x1, x2) =
−1 + 2P1,2(x)P1,2(y). The resulting filter has second-order zeros at ω1 = ±π and at
ω2 = ±π. It can be verified that |RH0(ω)| ! 1.83 and |RG0(ω)| ! 1.49 so that the
regularity exponent2 is at least 2 − log2 1.83 ≈ 1.13 for H0(ω) and 2 − log2 1.49 ≈ 1.43
for G0(ω).
Thus the corresponding scaling functions and wavelets are at least continuous. We
point out that better estimates are possible applying similar 1-D techniques. For instance,
one could prove a result similar to Lemma 7.1.2 in [2], as a consequence of Proposition
10.
Figure 3.9 shows the basis functions of the NSCT obtained with the filters designed
via mapping. As the picture shows, the functions have a good degree of regularity.
3.4 Applications
3.4.1 Image denoising
In order to illustrate the potential of the NSCT design using the techniques previously
discussed, we study additive white Gaussian noise (AWGN) removal from images by
means of thresholding estimators.
3.4.1.1 Comparison to other transforms
To highlight the performance of the NSCT relative to other transforms, we perform
hard threshold on the subband coefficients of the various transforms. We choose the
threshold Ti,j = Kσnijfor each subband. This has been termed K-sigma thresholding in
[69]. We set K = 4 for the finest scale and K = 3 for the remaining ones. We use five
scales of decomposition for nonsubsampled contourlet transform, contourlet transform
2The regularity exponent of a scaling function φ(t) is the largest number α such that Φ(ω) decays asfast as 1
(1+|ω1|+|ω2|)α .
66

Basis functions, Level 2
(a)
Basis functions, Level 3
Basis functions, Level 4
(b)
Figure 3.9 Basis functions of the nonsubsampled contourlet transform. (a) Basis func-tions of the second stage of the pyramid. (b) Basis functions of third (top 8) and fourth(bottom 8) stages of the pyramid.
(CT), and nonsubsampled wavelet transform. For the NSCT and CT we use 4,8,8,16,16
directions in the scales from coarser to finer, respectively.
Table 3.3 (left columns) shows the PSNR results for various transforms and noise
intensities. The results show the NSCT is consistently superior to curvelets and NSWT
67

Table 3.3 Denoising performance of the NSCT. The left-most columns are hard thresh-olding and the right-most ones soft estimators. For hard thresholding, the NSCT con-sistently outperforms curvelets and the NSWT. The NSCT-LAS performs on a par withthe more sophisticated estimator BLS-GSM and is superior to the BivShrink estimatorof.
Lena Comparison to other transforms Comparison to other methods
σ Noisy NSWT Curvelets CT NSCT NSWT-LAS BivShrink BLS-GSM NSCT-LAS
10 28.13 34.26 34.17 31.90 34.69 35.19 35.34 35.59 35.46
20 22.13 31.40 31.52 28.34 32.03 32.12 32.40 32.62 32.50
30 18.63 29.66 30.01 27.10 30.35 30.30 30.54 30.84 30.70
40 16.13 28.37 28.84 25.84 29.10 29.01 - 29.58 29.38
50 14.20 27.41 27.78 24.87 28.10 28.00 - 28.61 28.34
Barb. Comparison to other transforms Comparison to other methods
σ Noisy NSWT Curvelets CT NSCT NSWT-LAS BivShrink BLS-GSM NSCT-LAS
10 28.17 31.58 32.28 29.62 33.01 33.40 33.35 34.03 34.09
20 22.15 27.23 28.89 26.26 29.41 29.45 29.80 30.28 30.60
30 18.63 25.10 26.93 24.42 27.24 27.22 27.65 28.11 28.56
40 16.14 24.02 25.51 23.16 25.79 25.76 - 26.58 27.12
50 14.20 23.37 24.31 22.29 24.79 24.72 - 25.43 26.02
Pepp. Comparison to other transforms Comparison to other methods
σ Noisy NSWT Curvelets CT NSCT NSWT-LAS BLS-GSM NSCT-LAS
10 28.17 33.71 33.59 31.30 33.81 34.35 34.63 34.41
20 22.15 31.19 31.13 28.57 31.60 31.65 32.06 31.82
30 18.63 29.43 29.45 26.81 30.07 29.95 30.41 30.19
40 16.13 28.09 28.01 25.50 28.85 28.65 29.20 28.95
50 14.20 27.04 26.70 24.47 27.82 27.62 28.24 27.93
in PSNR measure. For the “Barbara” image, the NSCT yields improvements in excess
of 1.90 dB in PSNR over the NSWT. The NSCT also is superior to the CT as the results
show. Figure 3.10 displays the reconstructed images using the the NSWT, curvelets, and
NSCT. As the figure shows, both the NSCT and the curvelet transform offer a better
recovery of edge information relative to the NSWT. But improvements can be seen in
the NSCT, particularly around the eye.
68

(a) Original (b) NSWT
(c) Curvelets (d) NSCT
Figure 3.10 Image denoising with the NSCT and hard thresholding. The noisy intensityis 20. (a) Original Lena image. (b) Denoised with the NSWT, PSNR = 31.40 dB. (c)Denoised with the curvelet transform and hard thresholding, PSNR = 31.52 dB. (d)Denoised with the NSCT, PSNR = 32.03 dB.
3.4.1.2 Comparison to other denoising methods
We perform soft thresholding (shrinkage) independently in each subband. Following
[58] we choose the threshold
Ti,j =σ2
Nij
σi,j,n,
69
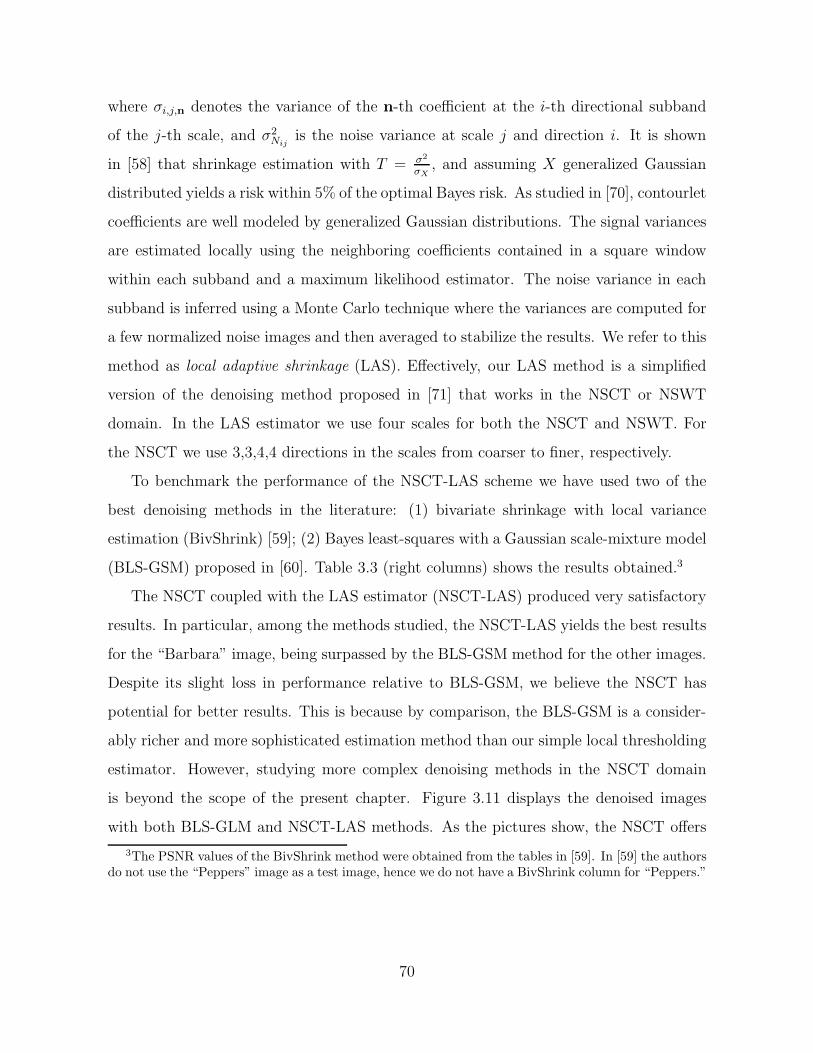
where σi,j,n denotes the variance of the n-th coefficient at the i-th directional subband
of the j-th scale, and σ2Nij
is the noise variance at scale j and direction i. It is shown
in [58] that shrinkage estimation with T = σ2
σX, and assuming X generalized Gaussian
distributed yields a risk within 5% of the optimal Bayes risk. As studied in [70], contourlet
coefficients are well modeled by generalized Gaussian distributions. The signal variances
are estimated locally using the neighboring coefficients contained in a square window
within each subband and a maximum likelihood estimator. The noise variance in each
subband is inferred using a Monte Carlo technique where the variances are computed for
a few normalized noise images and then averaged to stabilize the results. We refer to this
method as local adaptive shrinkage (LAS). Effectively, our LAS method is a simplified
version of the denoising method proposed in [71] that works in the NSCT or NSWT
domain. In the LAS estimator we use four scales for both the NSCT and NSWT. For
the NSCT we use 3,3,4,4 directions in the scales from coarser to finer, respectively.
To benchmark the performance of the NSCT-LAS scheme we have used two of the
best denoising methods in the literature: (1) bivariate shrinkage with local variance
estimation (BivShrink) [59]; (2) Bayes least-squares with a Gaussian scale-mixture model
(BLS-GSM) proposed in [60]. Table 3.3 (right columns) shows the results obtained.3
The NSCT coupled with the LAS estimator (NSCT-LAS) produced very satisfactory
results. In particular, among the methods studied, the NSCT-LAS yields the best results
for the “Barbara” image, being surpassed by the BLS-GSM method for the other images.
Despite its slight loss in performance relative to BLS-GSM, we believe the NSCT has
potential for better results. This is because by comparison, the BLS-GSM is a consider-
ably richer and more sophisticated estimation method than our simple local thresholding
estimator. However, studying more complex denoising methods in the NSCT domain
is beyond the scope of the present chapter. Figure 3.11 displays the denoised images
with both BLS-GLM and NSCT-LAS methods. As the pictures show, the NSCT offers
3The PSNR values of the BivShrink method were obtained from the tables in [59]. In [59] the authorsdo not use the “Peppers” image as a test image, hence we do not have a BivShrink column for “Peppers.”
70

a slightly better reconstruction. In particular, the table cloth texture is better recovered
in the NSCT-LAS scheme.
(a) Original (b) BLS-GSM (c) NSCT-LAS
Figure 3.11 Comparison between the NSCT-LAS and BLS-GSM denoising methods.The noise intensity is 20. (a) Original Barbara image. (b) Denoised with the BLS-GSMmethod, PSNR = 30.28 dB. (c) Denoised with NSCT-LAS, PSNR = 30.60 dB.
We briefly mention that in denoising applications, one can reduce the redundancy of
the NSCT by using critically sampled directional filter banks over the nonsubsampled
pyramid. This results in a transform with J + 1 redundancy which is considerably
faster. There is however a loss in performance as Table 3.4 shows. Nonetheless, in some
applications, the small performance loss might be a good price to pay given the reduced
redundancy of this alternative construction.
Table 3.4 Relative loss in PSNR performance (dB) when using the NSP with a criticallysampled DFB and the LAS estimator with respect to the NSCT-LAS method.
σ “Lena” “Barbara” “Peppers”10 -0.23 -0.48 -0.3220 -0.09 -0.44 -0.0930 -0.05 -0.37 -0.0140 -0.04 -0.34 -0.0050 -0.05 -0.31 -0.01
71

3.5 Conclusion
We have developed a fully shift-invariant version of the contourlet transform, the non-
subsampled contourlet transform. The design of the NSCT is reduced to the design of
a nonsubsampled pyramid filter bank and a nonsubsampled fan filter bank. We exploit
this new, less stringent filter design problem using a mapping approach, thus overcom-
ing the need of factorization. We also developed a lifting/ladder structure for the 2-D
NSFB. This structure, when coupled with the filters designed via mapping, provides
a very efficient implementation that under some additional conditions can be reduced
to 1-D filtering operations. Applications of our proposed transform in image denoising
and enhancement were studied. In denoising, we studied the performance of the NSCT
when coupled with a hard thresholding estimator and a local adaptive shrinkage. For
hard thresholding, our results indicate that the NSCT provides better performance than
competing transform such as the NSWT and curvelets. Concurrently, our local adaptive
shrinkage results are competitive to other denoising methods. In particular, our results
show that a fairly simple estimator in the NSCT domain yields comparable performance
to state-of-the-art denoising methods that are more sophisticated and complex. In image
enhancement, the results obtained with the NSCT are superior to those of the NSWT
both visually and with respect to objective measurements.
72

CHAPTER 4
THE INFORMATION RATES OF THEPLENOPTIC FUNCTION
The plenoptic function (Adelson and Bergen, 91) describes the visual information
available to an observer at any point in space and time. Samples of the plenoptic function
(POF) are seen in video and in general visual content, and represent large amounts of
information.
In this chapter we study the compression limits of the plenoptic function. A model
for the POF is that of a camera moving randomly through space and acquiring samples
of the POF at each time instant. The model has two sources of information representing
ensembles of camera motions and ensembles of visual scene data (i.e., “realities”). An
ensemble of camera motions is obtained by considering discrete random walks, and an
ensemble of realities is modelled with stationary ergodic processes.
Within our model, there are two cases to consider. In the first case, which we refer
to as the “video coding case,” the locations of the samples of the POF are not available
to the encoder, and the goal is to reproduce the sequence of samples of the POF at the
decoder. This results in a stochastic model for video that we study in detail. Both lossless
and lossy information rates are studied. The model is further extended to account for
realities that change over time. We derive bounds on the lossless and lossy information
rates for this dynamic reality model, stating conditions under which the bounds are tight.
Examples with synthetic sources suggest that in the presence of scene motion, simple
The results of this chapter appear in part in the references [72, 73]. Parts of this work were doneduring visits to LCAV-EPFL in Aug-Sept 2005 and May-Jul 2006. This is joint work with Prof. MartinVetterli and Prof. Minh Do.
73

hybrid coding using motion estimation with DPCM performs suboptimally relative to
the true rate-distortion bound.
In the second case, which we refer to as the “recording reality” case, the trajectory
is available at the encoder, and the goal is to reproduce the reality at the decoder. We
show that in this case, the information rate of the resulting process is the same one as
that of the underlying reality process, even in the case of a random traversal. We also
propose a simple code for the process that essentially attains the information rate bound.
4.1 Introduction
4.1.1 Background
Consider a moving camera that takes sample snapshots of an environment over time.
The samples are to be coded for later transmission or storage. Because the movements
of the camera are small relative to the scene, there are large correlations among multiple
acquisitions.
Examples of such scenarios include video compression and the compression of light-
fields. More generally, the compression problem in these examples can be seen as rep-
resenting and compressing samples of the plenoptic function [74]. The 7-D plenoptic
function (POF) describes the light intensity passing through every viewpoint, in every
direction, for all times, and for every wavelength. Thus, the samples of the plenoptic
function can be used to reconstruct a view of reality at the decoder. The POF is usually
denoted by POF (x, y, z,φ,ϕ, t,λ), where (x, y, z) represents a point in 3-D space, (φ,ϕ)
characterizes the direction of the light rays, t denotes time, and λ denotes the wave-
length of the light rays. The POF is usually parametrized in order to reduce its number
of dimensions. This is common in image based rendering [75, 76]. Examples of POF
parameterizations include digital video, the lightfield and lumigraph [30, 31], concentric
mosaics [77], and the surface plenoptic function [28].
74

Regardless of the parametrization, due to the large size of the data set, compression
is essential. Given a parametrization, a typical scenario involves a camera traversing
the domain of the POF and acquiring its samples to be compressed and then stored for
later rendering (see Figure 1.1). The information to be compressed is thus POF (W (t), t)
where the trajectory W (t) collectively represents a sequence of positions and angles where
light rays are acquired. In such context, it is crucial to know the compression limits and
how the parameters involved influence such limits. This would provide a benchmark to
assess compression schemes for such data set.
4.1.2 Prior art
The practical aspects of compressing video and other examples of the plenoptic func-
tion have been studied extensively (see e.g., [28, 78], and references therein). But very
little has been done in terms of rate-distortion analysis and addressing the general ques-
tion of how many bits are needed to code such a source. Due to the complexity inherent to
visual data, the source is difficult to model statistically. As a result, precise information
rates are difficult to obtain. Often, one obtains the rate-distortion behavior resulting from
a particular coding method, such as the hybrid coder used in video. For instance, Girod
in [79] analyzes the rate-distortion performance of hybrid coders using a Gauss-Markov
model for the video sequence as well as for the prediction error that is transmitted as
side information. A similar rate-distortion analysis for light-field compression is done in
[80]. Such models are interesting but they work with the assumption of predictive coding
from the start, thus being somewhat constrained. The compression of the POF is also
studied in [81], but in a distributed setting. Using piece-wise smooth models, the authors
derive operational rate-distortion bounds based on a parametric sampling model.
4.1.3 Chapter contributions
The general problem can be posed as shown in Figure 4.1. There is a physical world
or “reality” (e.g., scenes, objects, moving objects), and a camera that generates a “view
75

of reality” V . This “view of reality” (e.g., a video sequence) is coded with a source coder
with memory M giving an average rate of R bits. This bitstream is decoded with a
decoder with memory M to reconstruct a view of reality V close to the original one in
the MSE sense. We refer to memory and rate in a loose sense. Precise definitions of
memory and rate are given in Section 4.2.1.
In this chapter we propose a simplified stochastic model for the plenoptic function
that bears the elements of the general case. Within our model we distinguish between
two cases:
1. The video coding case. We take the viewpoint that video can be seen as
a 3-D slice of the POF. Our approach is to come up with a statistical model for
video data generation, and within that model establish information rate bounds.
We first propose a model in which the background scene is drawn randomly at time
0, but otherwise does not change as time progresses. Within this “static reality”
model we develop information rates for the lossless and lossy cases. Furthermore, we
compute the conditional information rate that provides a coding limit when memory
resources are constrained. We then extend the model to account for background
scene changes. We then propose a “dynamic reality” that is based on a Markov
random field. We compute bounds on the information rates. For the Gaussian
case, we compute lower and upper bounds that are tight in the high SNR regime.
Examples validating our theoretical findings are presented.
2. The “recording reality” case. In this case, the samples of the POF are coded
and sent with the aim of reproducing the underlying scene, and not the sequence of
MSE+
VIEW OF VIEW OF
REALITY REALITY
V V
ENCODER DECODER
WITH WITH
MEMORY M MEMORY M
CHANNEL
RATE R
“Reality”
Figure 4.1 The problem under consideration. There is a world and a camera thatproduces a “view of reality” that needs to be coded with finite or infinite memory.
76

snapshots taken over time. This is similar to the case one finds in light field coding
where the image samples resulting from a random trajectory in the camera array
are sent to the decoder with the aim of reconstructing the underlying scene (see
[80, 82]). We show, in this case, that the information rate of the resulting source is
the same as the original stationary source representing the visual reality. We also
propose a simple code that within our model, attains the given information rate.
The chapter is organized as follows. Section 4.2 sets up the problem and introduces
notation. The video coding problem is treated in Sections 4.3-4.4. We present results
for the static reality case in Section 4.3, and treat the dynamic case in Section 4.4. In
Section 4.5 we present results for the “recording reality” case. Concluding remarks are
made in Section 4.6.
4.2 Definitions and Problem Setup
We describe a simplified model for the process displayed in Figure 4.1. Consider a
camera moving according to a Bernoulli random walk. The random walk is defined as
follows:
Definition 2 The Bernoulli random walk is the process W = (Wt : t ∈ Z+) such that
Pr {W0 = 0} = 1 and for t ≥ 1,
Wt =t∑
i=1
Ni,
where {Ni} are drawn i.i.d. from the set {−1, 1} with probability distribution Pr{Ni =
1} = pW .
We assume without loss of generality that pW ≤ 0.5.
In front of the camera there is an infinite wall that represents a scene that is projected
onto a screen in front of the camera path (i.e., we ignore occlusion). The wall is modelled
as a 1-D strip “painted” with an i.i.d. process X = (Xn : n ∈ Z) that is independent of
the random walk W . The process X follows some probability distribution pX drawing
77

values from an alphabet X . Here we focus on the rather unrealistic i.i.d. case due to its
simplicity. Generalization to stationary process is left for future work. In the static case,
the wall process X is drawn at t = 0. Figure 4.2 (a) illustrates the proposed model.
Wall
Wt
· · · · · ·X0 X1 X2 X3
Camera Position
Image(t)V0 := (X0, X1, X2, V3)
(a)
V0
V1
V2
V3
V4
V5
V6
Wall process X
Wt
...
· · · · · ·
(b)
Figure 4.2 A stochastic model for video. (a) Simplified model. (b) The resulting vectorprocess V . Each sample of the vector process is a block of L samples from the processX taken at the position indicated by the random walk Wt. In the figure L = 4.
At each random walk time step, the camera sees a block of L samples from the infinite
wall, where L ≥ 1. This results in a vector process V = (Vt : t ∈ Z+) indexed by the
random walk positions, as defined below.
Definition 3 Let W be a random walk independent of X, and let L be an integer greater
than one. The vector process V = (Vt : t ∈ Z+) is defined as
Vt := (XWt, XWt+1, · · · , XWt+L−1). (4.1)
The random walk is a simple stochastic model for an ensemble of camera movements.
It includes camera panning as a special case, i.e., when pW = 0. Notice that consecutive
samples of the vector process, which are vectors of length L, have at least L− 1 samples
that are repeated. Furthermore, because the process X is i.i.d., it follows that the vector
process V is stationary and mean-ergodic. Figure 4.2 (b) illustrates the vector process
V .
78

4.2.1 The video coding problem
Given the vector process V = (V0, V1, · · · ), the coding problem consists in finding an
encoder/decoder pair that is able to describe and reproduce the process V at the decoder
using no more than R bits per vector sample. The decoder reproduces the vector process
V = (V0, V1, · · · ) with some delay. The reproduction can be lossless or lossy with fidelity
D. The encoder encodes each sample Vt based on the observation of M previous vector
samples Vt−1, . . . , Vt−M . Thus, M is the memory of the encoder/decoder. Since encoding
is done jointly, there is a delay incurred. The lossless and lossy information rates of the
process V provide the minimum rate needed to either perfectly reproduce the process
V at the decoder, or to reproduce it within distortion D, respectively. The information
rate (lossless or lossy) is usually only achievable at the expense of infinite memory and
delay [83].
4.2.2 Properties of the random walk
The following notions are needed in what follows.
Definition 4 Let W be a random walk. The set of recurrent paths of length t is the
event set
Rt := {(W0, W1, . . . , Wt) : Wt = Ws for some s, 0 ≤ s < t}.
If a path belongs to Rt, we call it a recurrent path. We call Pr {Rt} the probability of
recurrence at step t.
The probability of the complementary set Pr{Rt}
is called the first-passage proba-
bility. When a site Wt has not occurred before, we refer to it as a new site. A related
quantity is the probability of return.
Definition 5 Let W be a random walk, and let t > s ≥ 0. Consider the event set
T ts := {(W0, W1, . . . , Wt) : Wt = Ws but Wt *= Wi, for any i such that s < i < t}.
We call Pr {T ts } the probability of return at step t after step s.
79

When s = 0 we write T t for T t0 . From Definitions 4 and 5 one can check that
Rt =t⋃
i=1
T tt−i, (4.2)
where the union is a disjoint one. Furthermore, the sets T ts are shift invariant in the
sense that
Pr{T t
s
}= Pr
{T t−s
}. (4.3)
Combining (4.2) and (4.3), we also have that
Pr{Rt}
=t∑
i=0
Pr{T t
t−i
}=
t∑
i=0
Pr{T i}
. (4.4)
In addition to the above, for the case of the Bernoulli random walk we have the
following [84, 85].
Lemma 2 For the Bernoulli random walk with pW ≤ 1/2, the following holds:
(i) limt→∞ P (Rt) = 1 − 2pW .
(ii) For t > 0, Pr {T 2t−1} = 0, and Pr {T 2t} = 2Ct−1 ((1 − pW )pW )t, where Ct :=
1t+1
(2tt
).
4.3 Information Rates for a Static Reality
4.3.1 Lossless information rates for discrete memoryless wall
Denote V t = (V1, . . . , Vt). We assume that V0 is known to the decoder. Unless
otherwise specified, we assume that X takes value on a finite alphabet X . We seek to
quantify the entropy rate of V [86]:
H(V ) = limt→∞
1
tH(V t)
= limt→∞
H(Vt|V t−1). (4.5)
To characterize H(V ), we describe intuitively an upper and a lower bound (resp. sufficient
and necessary rates) that will be formalized in Theorem 1 below. For a sufficient rate,
80

note that V can be reproduced up to time t when both the trajectory W t = (W1, . . . , Wt)
and the samples of the wall occurring at the new sites of W t are available. When t is
large, this amounts to H(W t) = tH(pW ) bits for the trajectory, plus tPr{Rt}
H(X) ≈
t(1−2pW )H(X) for the new sites. So, a sufficient average rate is H(pW )+(1−2pW )H(X).
Moreover, the complexity of V is at least the complexity of the new sites, and so (1 −
2pW )H(X) is a necessary rate. This intuitive lower bound can be improved by examining
the probability of correctly inferring the random path W t from observing the vector
process V t. This probability is related to the following event:
AL := { (X0, . . . , XL) = (x0, x1, x0, x1, . . .), x0, x1 ∈ X}. (4.6)
To see this, let L = 4 and consider inferring W1 from the observation of (V0, V1). If
V0 = (x0, x1, x0, x1) and V1 = (x1, x0, x1, x0), then it follows that W1 cannot be unam-
biguously determined from (V0, V1). Intuitively, if W t can be determined from V t, then
the complexity of the trajectory is embedded in V t and thus has to be fully described.
If, however, there is ambiguity on W t, then sets of W t that are consistent with V t can
be indexed and coded with a lower rate. We are now ready to state and prove Theorem
1.
Theorem 1 Consider the vector process V consisting of L-tuples generated by a Bernoulli
random walk with transition probability pW ≤ 1/2, and a wall process X, drawing val-
ues i.i.d. on a finite alphabet, and that has entropy H(X). The conditional entropy
H(Vt|V t−1) obeys
Pr{Rt}
H(X)+ H(pW )Pr{AL
}≤ H(Vt|V t−1) ≤ 1
t
t∑
i=1
Pr{Ri}
H(X)+ H(pW ), (4.7)
where AL is as in (4.6). The entropy rate H(V ) satisfies
(1 − 2pW )H(X) + H(pW )Pr{AL
}≤ H(V ) ≤ (1 − 2pW )H(X) + H(pW ). (4.8)
81

Proof. For each t we have
H(Vt|V t−1)(a)
≤ 1
t
t∑
i=1
H(Vi|V i−1) =H(V t)
t
(b)
≤ H(V t) + H(W t|V t)
t(4.9)
=H(W t) + H(V t|W t)
t(4.10)
=H(W t) +
∑ti=1 H(Vi|V i−1, W t)
t
(c)= H(pW ) +
1
t
t∑
i=1
H(Vi|V i−1, W i), (4.11)
where (a) follows because H(Vt|V t−1) decreases with t, (b) holds because H(W t|V t) ≥ 0,
and (c) is true because H(W t) = tH(pW ) and (Wi+1, . . . , Wt) is independent of (V i, W i).
Further, it is true that
H(Vi|V i−1, W i = wi, wi is recurrent) = 0.
H(Vi|V i−1, W i = wi, wi is not recurrent) = H(X).
Consequently,
H(Vi|V i−1, W i) =∑
wi∈Ri
Pr{W i = wi
}H(Vi|V i−1, W i = wi)
= Pr{Ri}
H(X). (4.12)
Combining (4.9) and (4.12) gives the upper bound in (4.7). We now turn to the lower
bound. Using the chain rule for mutual information and the information inequality, we
have
H(Vt|V t−1) = H(Vt|V t−1, W t) + I(W t; Vt|V t−1)
= H(Vt|V t−1, W t) + I(W t−1; Vt|V t−1) + I(Wt; Vt|V t−1, W t−1)
≥ H(Vt|V t−1, W t) + I(Wt; Vt|V t−1, W t−1). (4.13)
82

Moreover, because the random walk increment Wt−Wt−1 is independent of (V t−1, W t−1),
it follows that
I(Wt; Vt|V t−1, W t−1) = H(Wt|V t−1, W t−1) − H(Wt|V t, W t−1)
= H(pW ) − H(Wt|V t, W t−1). (4.14)
We proceed by finding an upper bound for H(Wt|V t, W t−1). If (vt, wt−1) is such that Wt
can be inferred with with probability one from (vt, wt−1), then the conditional entropy
is zero. Otherwise, if (vt, wt−1) is such that Wt cannot be inferred with probability one,
then the conditional entropy is at most H(pW ). Thus, denote by At the set of (vt, wt−1)
such that Wt cannot be inferred from (vt, wt−1) with probability one. We have:
H(Wt|V t, W t−1) =∑
(vt,wt−1)
Pr{wt−1,vt
}H(Wt|V t = vt, W t−1 = wt−1
)
≤ H(pW ) Pr{
(wt−1,vt) ∈ At
}.
The event set on the right-hand side above is contained in the event set {Vt−1 =
(x0, x1, . . .), Vt = (x1, x0, . . .)}. By conditioning on (Wt−1, W t), it follows that the prob-
ability of this event is Pr {AL}, where AL is as in (4.6). So the right-hand side above
is upper-bounded by H(pW ) Pr {AL} . Combining this with (4.13 - 4.14) and (4.12), we
assert the lower bound in (4.7). By letting t → ∞ in (4.7) and using Lemma 2 (i) we
obtain (4.8). !
Remark 7 The upper bound of Theorem 1 contains slack. One trivial example is when
the entropy of the process X is 0. In such a case the bound reduces to H(pW ), which is
clearly loose given that the vector process V has zero entropy in this case.
Remark 8 The recurrences of the random walk have the effect of reducing the entropy
of the process. In particular, for a random walk with pW = 1/2, the entropy rate of the
vector process reduces to that of the random walk.
Remark 9 The size of the conditional entropy H(Wt|V t) determines the amount of slack
in the bounds (see (4.9)). Such entropy depends, among other things, on the size of the
alphabet of the process V and on the block length L, as the next example illustrates.
83
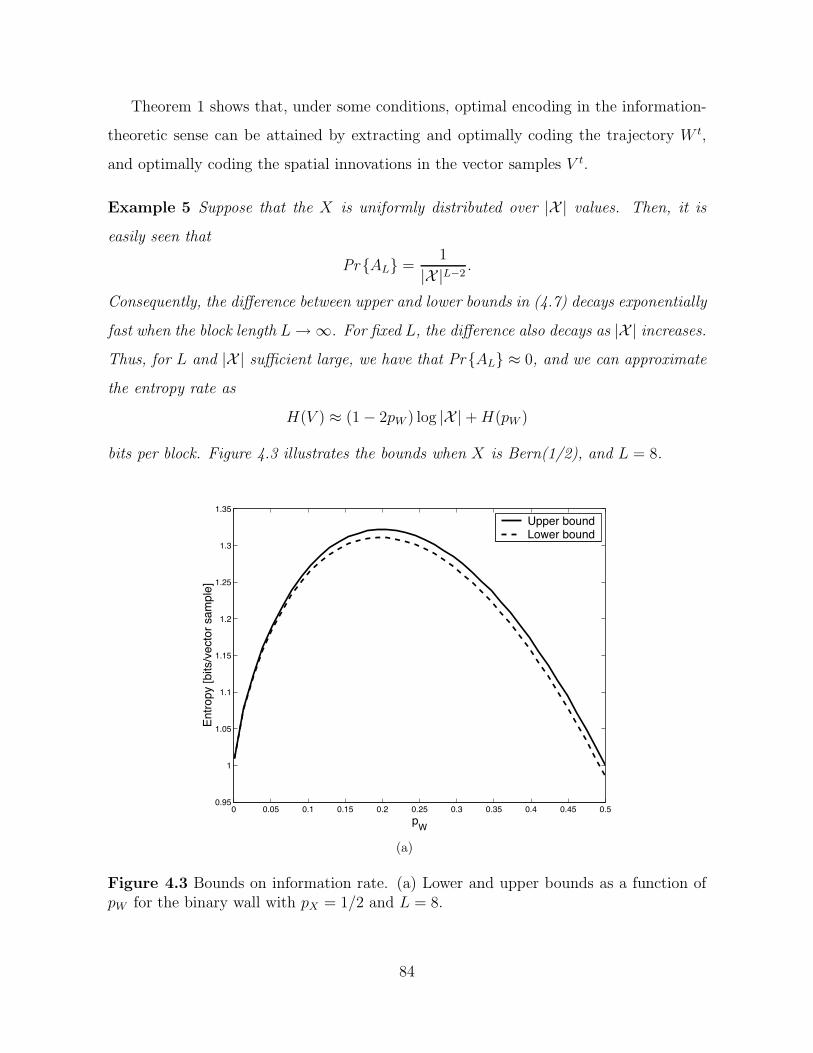
Theorem 1 shows that, under some conditions, optimal encoding in the information-
theoretic sense can be attained by extracting and optimally coding the trajectory W t,
and optimally coding the spatial innovations in the vector samples V t.
Example 5 Suppose that the X is uniformly distributed over |X | values. Then, it is
easily seen that
Pr {AL} =1
|X |L−2.
Consequently, the difference between upper and lower bounds in (4.7) decays exponentially
fast when the block length L → ∞. For fixed L, the difference also decays as |X | increases.
Thus, for L and |X | sufficient large, we have that Pr {AL} ≈ 0, and we can approximate
the entropy rate as
H(V ) ≈ (1 − 2pW ) log |X | + H(pW )
bits per block. Figure 4.3 illustrates the bounds when X is Bern(1/2), and L = 8.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50.95
1
1.05
1.1
1.15
1.2
1.25
1.3
1.35
pW
Entro
py [b
its/v
ecto
r sam
ple]
Upper boundLower bound
(a)
Figure 4.3 Bounds on information rate. (a) Lower and upper bounds as a function ofpW for the binary wall with pX = 1/2 and L = 8.
84
4.3.2 Memory constrained coding
From source-coding theory, the entropy rate H(V ) can be attained with an encoder-
decoder pair with unbounded memory and delay. In the finite memory case, often the
encoder has to code Vt based on the observation of Vt−1, . . . , Vt−M , and the decoder
proceeds accordingly. This situation is similar to one encountered in video compression,
where a frame at time t is coded based on M previously coded frames [78]. In this case, the
average code-length is bounded below by the conditional entropy H(Vt|Vt−1, . . . , Vt−M) =
H(VM |VM−1, . . . , V0). The bound (4.7) in Theorem 1 describes the behavior of the condi-
tional entropy H(VM |V M−1). Intuitively, by looking at the stored samples from t−M up
to t, the encoder can separately code Wt and take advantage of recurrences existent from
t−M to t− 1. In effect, finite memory prevents the encoder to exploit long term recur-
rences that are not visible in the memory. Similar observations are verified in practice
for instance in [87–89].
Figure 4.4 illustrates how memory influences coding when X is uniform over an al-
phabet of size |X | = 256. The curves are computed using the upper bound in (4.7).
Because the alphabet size is large, the bound is approximately tight. In the most re-
current case with pW = 0.5, the conditional entropy approaches the entropy rate at a
slower rate when M → ∞ [see (4.7-4.8)]. Furthermore, as M approaches infinity, there
is a significant reduction in the conditional entropy. For instance, an encoder that uses 1
frame in the past with optimal coding would need about twice as many bits as one that
uses 4 frames. By contrast, when pW = 0.1, because longer term recurrences are rare,
moderate values of M are already enough to attain the limiting rate. As a result there
is little to gain by increasing M .
The observations drawn from Figure 4.4 are also verified in practice for instance in
[87, 88, 90]. Finally, we point out that the issue of exploiting long term recurrences dates
back to Ziv-Lempel [91] in lossless compression. Extension of the Lempel-Ziv algorithm
to the lossy case is also discussed in [92].
85
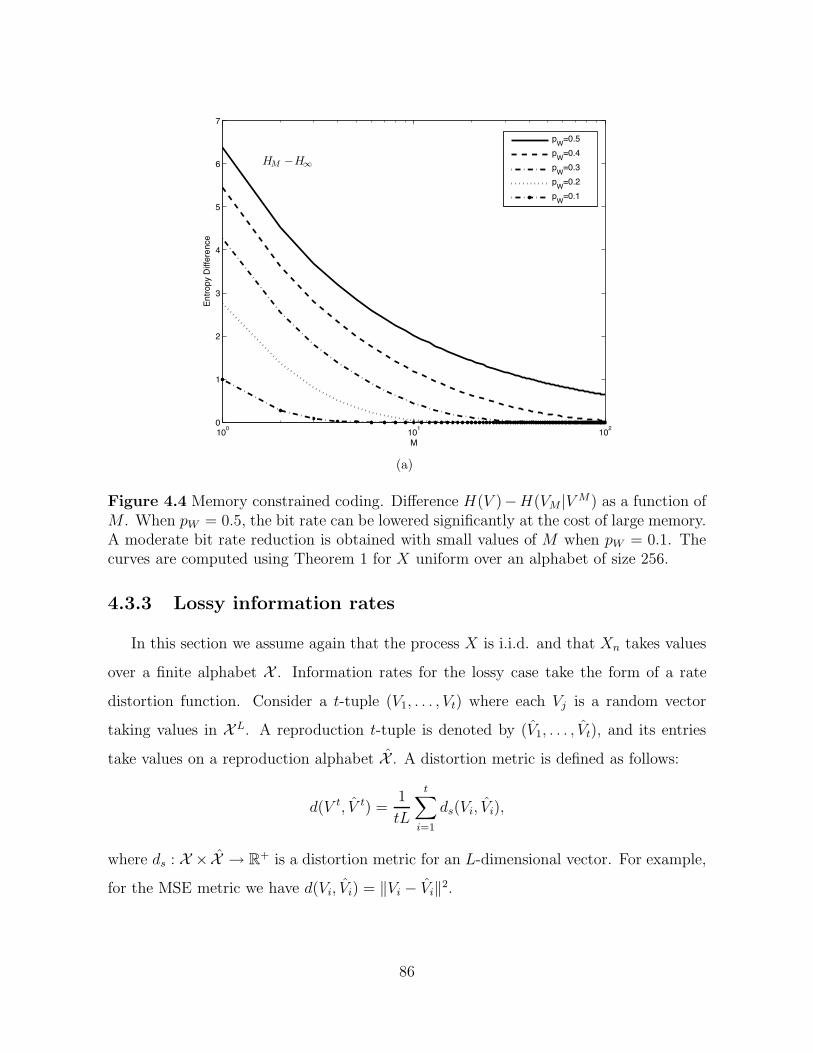
100 101 1020
1
2
3
4
5
6
7
M
Entro
py D
iffer
ence
pW=0.5pW=0.4pW=0.3pW=0.2pW=0.1
HM −H∞
(a)
Figure 4.4 Memory constrained coding. Difference H(V )−H(VM |V M) as a function ofM . When pW = 0.5, the bit rate can be lowered significantly at the cost of large memory.A moderate bit rate reduction is obtained with small values of M when pW = 0.1. Thecurves are computed using Theorem 1 for X uniform over an alphabet of size 256.
4.3.3 Lossy information rates
In this section we assume again that the process X is i.i.d. and that Xn takes values
over a finite alphabet X . Information rates for the lossy case take the form of a rate
distortion function. Consider a t-tuple (V1, . . . , Vt) where each Vj is a random vector
taking values in X L. A reproduction t-tuple is denoted by (V1, . . . , Vt), and its entries
take values on a reproduction alphabet X . A distortion metric is defined as follows:
d(V t, V t) =1
tL
t∑
i=1
ds(Vi, Vi),
where ds : X × X → R+ is a distortion metric for an L-dimensional vector. For example,
for the MSE metric we have d(Vi, Vi) = ‖Vi − Vi‖2.
86

The rate-distortion function for each t, and for given distortion metric, is written as
RV t(D) = infEd(V t,V t)≤D
I(V t; V t)
t, (4.15)
where the infimum of the normalized mutual information I(V t;V t)t is taken over all joint
probability distributions of (V1, . . . , Vt) and (V1, . . . , Vt) such that Ed(V t, V t) ≤ D.
The rate-distortion function for the process V = (V1, V2, . . .) is given by [83]
RV (D) = limt→∞
RV t(D). (4.16)
Because the process V is stationary, it can be shown that the above limit always exists
(see [83, p. 270], or [93]).
By coding the side information W t separately, an upper bound for RV (D) similar to
Theorem 1 can be developed. The upper bound is based on the notion of conditional
rate-distortion [83, 94]. This notion is developed in the lemma below.
Lemma 3 (Gray [94]) Let V be a random vector taking values in X and let W be another
random variable. Define the conditional rate-distortion:
RV |W (D) = infEd(V,V )≤D
I(V ; V |W ), (4.17)
where the infimum is taken over all conditional joint distributions of V and V given W .
The conditional rate-distortion obeys
RV |W (D) ≤ RV (D) ≤ RV |W (D) + I(V ; W ). (4.18)
The conditional rate-distortion of V t conditional on W t is defined as follows:
RV t|W t(D) = infEd(V t,V t)≤D
I(V t; V t|W t)
t, (4.19)
where the infimum is taken over all joint probability distributions of V t and V t conditional
on W t. The conditional rate-distortion can be bounded in terms of the rate-distortion
function of the process X.
87

Proposition 11 The conditional rate-distortion function satisfies
lim supt→∞
RV t|W t(D) ≤ (1 − 2pW )RX(D). (4.20)
Proof. Let λ(wt) denote the number of new sites from the path wt. Then, conditional on
wt, the V t has only λ(wt) entries that need to be encoded. For each (wt, vt), let fwt(vt)
denote the vector with the λ(wt) entries of vt to be coded. Moreover, let V and V be
such that E|Vi[j] − Vi[j]|2 ≤ D for i = 0, . . . , t, and j = 0, . . . , L − 1. We have
I(V t; V t|W t) =∑
wt
Pr{W t = wt
}I(V t; V t|W t = wt)
≥∑
wt
Pr{W t = wt
}I(fwt(V t); fwt(V t)|W t = wt)
≥∑
wt
Pr{W t = wt
}λ(wt)RX(D)
= Eλ(W t)RX(D), (4.21)
where we have used the inequality I(X; Y ) ≥ I(f(X); g(Y )) for measurable functions
f, g [95], and the fact that the process X is i.i.d. and independent of W t, and that the
individual distortions are less than D. The lower bound can be achieved as follows. Let
p∗(X|X) be the test channel that attains RX(D). We let Xn be the result of passing Xn
though the channel p∗(Xn|Xn). For each given wt we construct V t from X and wt. This
results in a joint conditional distribution that attains the lower bound (4.21).
Because the lower bound is attainable, it follows that
RV t|W t(D) ≤ Eλ(W t)
tRX(D).
Moreover, using Lemma 2 it is straightforward to check that t−1Eλ(W t) converges to
(1 − 2pW ), which concludes the proof. !
The above proposition enables us to derive an upper bound for the rate-distortion
function.
88

Theorem 2 Consider the i.i.d. process X such that Xn takes values over a finite alphabet
X . Let RX(D) denote its rate-distortion function. The rate-distortion function of the
process V satisfies
RV (D) ≤ H(pW ) + (1 − 2pW )RX(D). (4.22)
Proof. Using Lemma 3 we have the following bound based on the conditional rate-
distortion function [94]:
RV t|W t(D) ≤ RV t(D) ≤ RV t|W t(D) +1
tI(V t; W t)
≤ RV t|W t(D) + H(pW ).
Letting t → ∞ and using Proposition 11 asserts (4.22). !
Remark 10 Because the alphabet is finite, if the reproduction alphabet X is a superset
of the original alphabet X , then we have that for each t, RV t(D) converges to t−1H(V t)
as D → 0 [83]. Consequently, for large alphabet sizes and large block length, the entropy
rate bound of (4.22) is sharp, and so the above bound on the rate-distortion is also sharp
for small distortion values.
Theorem 2 shows that in the low distortion regime, optimal encoding in the information-
theoretic sense can be attained by extracting and coding W t losslessly, and using the re-
maining bits to optimally code the vector samples corresponding to spatial innovations.
4.4 Information Rates for Dynamic Reality
The model in the previous section assumes a “static background.” More precisely, the
infinite wall process X is drawn at time 0 and does not change after that. In practice,
however, scene background changes with time and a suitable model would have to account
for those changes. New information comes fundamentally in two forms: the first consists
of information that is “seen” by the camera for the first time, while the second consists of
89

changes to old information (e.g., changes in the background). In this section, we propose
a model that accounts for both these sources of new information.
To develop a model for scenes that change over time, we model X as a 2-D random
field indexed by (n, t) ∈ Z × Z+. A simple yet rich model for the field is that of a first
order Markov model over time, and i.i.d. in space. The random field is defined as follows:
Definition 6 The random field is the field RF = {X(t)n : (n, t) ∈ Z × Z+}, such that
(X(0)n : n ∈ Z) is i.i.d. and for each n ∈ Z, the process (X(t)
n : t ∈ Z) is a first order
time-homogeneous Markov process.
The fact that the random field (X(0)n : n ∈ Z) is i.i.d. simplifies calculations con-
siderably. One justification for this model is when the field is Gaussian. In such case,
independence is attained by a simple linear transformation of the process (X(0)n : n ∈ Z).
It can be shown that such transformation preserves the Markovianity on the time dimen-
sion, and the i.i.d. assumption can be justified in this case.
Throughout this section, we assume that the Markov chain of the vector process is
already in steady-state. This assumption is common, for example, in calculating rate-
distortion functions for Gaussian processes with memory [83].
The dynamic vector process V is defined similarly to the static case, but now taking
snapshots or vectors from the random field:
Definition 7 Let RF = {X(t)n : (n, t) ∈ Z × Z+} be a random field, and let W be a
random walk. The dynamic vector process is the process V = (Vt : t ∈ Z+) such that for
each t > 0,
Vt = (X(t)Wt
, X(t)Wt+1, . . . , X
(t)Wt+L−1).
The random field and the corresponding vector process are illustrated in Figure 4.5.
4.4.1 Lossless information rates
In the development that follows we assume, for simplicity, that the random field takes
values on a finite alphabet X . The results can equally be developed for a random field
taking values over R, under suitable technical conditions.
90

t
n
· · · · · ·
· · · · · ·...
...
X(t)n−1 X
(t)n X
(t)n+1
X(t+1)n−1 X
(t+1)n X
(t+1)n+1
(a)
t
n
...
X(0)0 X
(0)1 X
(0)2
X(1)1 X
(1)2 X
(1)3
X(2)0 X
(2)1 X
(2)2
(b)
Figure 4.5 A model for the dynamic reality. (a) It entails a random field that is Markovin the time dimension t, and i.i.d. in the spatial dimension n. (b) Motion then occurswithin this random field.
To derive bounds for H(V ) in the dynamic reality case, we compute the following
conditional entropy rate:
H(V |W ) := limt→∞
H(Vt|V t−1, W t), (4.23)
if the limit exists. As we shall see in the examples that follow, the above limit can be
computed analytically. The key is to compute H(Vt|V t−1, W t = wt) by splitting the set of
all paths into recurrent and nonrecurrent paths, and further splitting the set of recurrent
paths according to (4.2).
Referring to Figure 4.5(b), let wt be a given path and consider the process V t. Note
that each Vt has L − 1 entries from the same spatial location as L − 1 entries from
Vt−1. The remaining entry corresponds to either a nonrecurrent or a recurrent location
depending on wt. If wt is nonrecurrent, then by the Markov property of the field, we
have
H(Vt|V t−1, W t = wt) = H(X(t)0 ) + (L − 1)H(X(t)
0 |X(t−1)0 ).
If a path is recurrent at t, then there is an s < t such that ws = wt but wt *= wi,
for s < i < t. Using the Markov property again, it follows that H(Vt|V t−1, W t = wt) =
91

H(X(t)0 |X(s)
0 )+(L−1)H(X(t)0 |X(t−1)
0 ). The above argument is explicitly written as follows:
H(Vt|V t−1, W t) =∑
wt∈Rt
H(Vt|V t−1, W t = wt)Pr{W t = wt
}
+∑
wt∈Rt
H(Vt|V t−1, W t = wt)Pr{W t = wt
}
=(H(X(t)
0 ) + (L − 1)H(X(t)0 |X(t−1)
0 ))
Pr{Rt}
+
(t/2)∑
i=1
∑
wt∈T tt−2i
H(Vt|V t−1, W t = wt)Pr{W t = wt
}
=(H(X(t)
0 ) + (L − 1)H(X(t)0 |X(t−1)
0 ))
Pr{Rt}
+(t/2)∑
i=1
[(H(X(t)
0 |X(t−2i)0 ) + (L − 1)H(X(t)
0 |X(t−1)0 )
)Pr
{T t
t−2i
}
= (L − 1)H(X(t)0 |X(t−1)
0 ) + H(X(t)0 )Pr
{Rt}
+(t/2)∑
i=1
H(X(2i)0 |X(0)
0 )Pr{T 2i
0
}.
By letting t → ∞ using Lemma 2 (i) leads to
H(V |W ) = H(X(∞)0 )(1−2pW )+(L−1)H(X(1)
0 |X(0)0 )+
∞∑
i=1
H(X(i)0 |X(0)
0 )Pr{T i}
, (4.24)
where Pr {T i} is the probability of return given in Lemma 2 (ii). The infinite sum in the
left-hand side of (4.24) is well-defined. It is an infinite sum of positive numbers, and it
is bounded above by H(X(∞)0 )
∑∞i=1 Pr {T i} = H(X(∞))2pW .
With the conditional entropy rate in (4.24) we can derive lower and upper bounds
on the entropy rate H(V ). To derive an upper bound, we bound H(V t)t for each t and
let t → ∞. For the lower bound, similar to Section 4.3, we bound H(Vt|V t−1) below.
Because the alphabet X is finite and the process is stationary, the limits of H(V t)t and
H(Vt|V t−1) as t → ∞ coincide.
The upper bound is obtained from the inequality H(V t) ≤ tH(pW )+H(V t|W t). Note
that H(V t|W t) =∑t
i=1 H(Vi|V i−1, W t), so that if H(Vi|V i−1, W t) converges to a limit
as t → ∞, we have necessarily that t−1H(V t|W t) converges to the same limit (see e.g.,
92

[86, p. 64]). So,
limt→∞
H(V t)
t≤ H(pW ) + lim
t→∞
H(V t|W t)
t
= H(pW ) + limt→∞
H(Vt|V t−1, W t)︸ ︷︷ ︸
H(V |W )
.
To derive a lower bound, note that the development leading to (4.13-4.14) for the
static case also holds for the dynamic case. So, we have
H(V t|V t−1) ≥ H(pW ) + H(Vt|V t−1, W t) − H(Wt|V t, W t−1). (4.25)
Thus, a lower bound is obtained by finding an upper bound for H(Wt|W t−1, V t). Be-
cause the process X changes at each time step, we cannot use the event AL to obtain
an upper bound for H(Wt|W t−1, V t) as in the static case. A useful upper bound for
H(Wt|W t−1, V t) is obtained by using Fano’s inequality. Let Pe denote the probability of
error in estimating Wt based on observing Yt := (Vt, Vt−1, Wt−1), i.e.,
Pe = Pr{
W (Yt) *= Wt
},
where W (·) is a given estimator assumed to be the same for all t. Since Wt−1 is observed,
estimating Wt amounts to estimating the increment Nt = Wt − Wt−1. Because V is
stationary and Nt is i.i.d., it follows that Pe does not depend on t. From Fano’s inequality,
we have that
H(Wt|V t, W t−1) ≤ H(Nt|Yt)
≤ H(Pe) + Pe log2(1)
= H(Pe). (4.26)
Consequently, a lower bound is obtained by combining (4.25) with (4.26) above.1 By
letting t → ∞ we arrive at the following:
Theorem 3 Consider the vector process V consisting of L-tuples generated by a Bernoulli
random walk with transition probability pW with pW ≤ 1/2, and the random field RF =
1Sharper lower bounds can be obtained by estimating Nt using (V t, W t−1). However, the estimateusing Yt is easily computed and already leads to a sharp enough bound.
93

{X(t)n : (n, t) ∈ Z × Z+} that is i.i.d. on the n dimension and first-order Markov on the
t dimension. The entropy rate of the process V obeys
H(pW ) + H(V |W ) − H(Pe) ≤ H(V ) ≤ H(pW ) + H(V |W ), (4.27)
where H(V |W ) is as in (4.24), and Pe is the probability of error in estimating W1 based
on the observation of Y1 = (V1, V0, W0) with any estimator W (Y1).
The lower and upper bounds become sharp when Pe → 0. This occurs with large block
sizes and for small changes in the background. The examples that follow illustrate the
sharpness of the above bounds. In the first example, we consider a binary process X,
and on the second a Gaussian process with AR(1) temporal innovations.B
SC
BSC
BSC
. . .
. . . . . .
. . .
. . .. . .
...
...
X(t)n−1 X
(t)n X
(t)n+1
X(t+1)n−1 X
(t+1)n X
(t+1)n+1
Figure 4.6 The binary random field. Innovations are in the form of bit flips caused bybinary symmetric channels between consecutive time instants.
Example 6 BSC innovations
Suppose that at t = 0, the process is a strip of bits that are i.i.d. Bernoulli with initial
distribution pX. Suppose that from t to t + 1 there is a nonzero probability pI that the
bit X(t)n is flipped. This amounts to a binary symmetric channel (BSC) between X(t)
n
and X(t+1)n , as illustrated in Figure 4.6. The t BSCs in series between X(0)
n and X(t)n are
equivalent to a single BSC with transition probability (see [86, p. 221], problem 8)
pI,t = 0.5(1 − (1 − 2pI)
t). (4.28)
94

Note that for pI > 0, we have that limt→∞ pI,t = 0.5. So, for each n, the distribution of
X(t)n converges to the stationary distribution Bern(0.5). Substituting in (4.24) gives for
pI > 0:
H(V |W ) = H(1
2)(1 − 2pW ) + (L − 1)H(pI) +
∞∑
i=1
H(pI,2i)Pr{T 2i
0
}. (4.29)
Notice that when pI = 0 we recover the static case. By using the above in (4.27) we obtain
the corresponding bounds. Figure 4.7 (a) illustrates the lower and upper bounds for L = 8
and pX = 0.5. We compute the bounds using (4.24) and (4.27), where we truncate the
infinite sum in (4.24) at a very large t. The probability Pe is computed through Monte
Carlo simulation using a simple Hamming distance detector. The bounds are surprisingly
robust in this case, and provide good approximation of the true entropy rate. Notice that
when pI increases, the entropy rate of the recurrent case (pW = 0.5) crosses that of the
panning case (pW = 0.05). This is because in the recurrent case a greater amount of bits
is spent coding the innovations.
Figure 4.7 (b) shows the contour plots of the upper bound for various pairs (pI , pW ).
The plot shows how the two innovations are combined to generate a given entropy value.
Notice that when pW approaches 12 , the entropy of the trajectory becomes significant and
it compensates for the lesser amount of spatial innovation.
To measure the effect of memory in the dynamic case, we evaluate the upper bound on
the conditional entropy rate (as in (4.11)), and the upper bound on the true entropy rate
given by (3). Figure 4.8 illustrates the difference between the conditional entropy upper
bound and the true entropy upper bound. The curves are similar to the ones obtained in
the static case with spatial innovation (Figure 4.4), and confirm the very intuitive fact
that memory is less useful when the scene around changes rapidly.
Example 7 AR(1) Innovations.
Although the development leading to Theorem 3 was made for finite alphabets, the
same calculation can be done for a random field taking values on R, provided it has abso-
lutely continuous joint densities. In this case, the entropies involved become differential
95
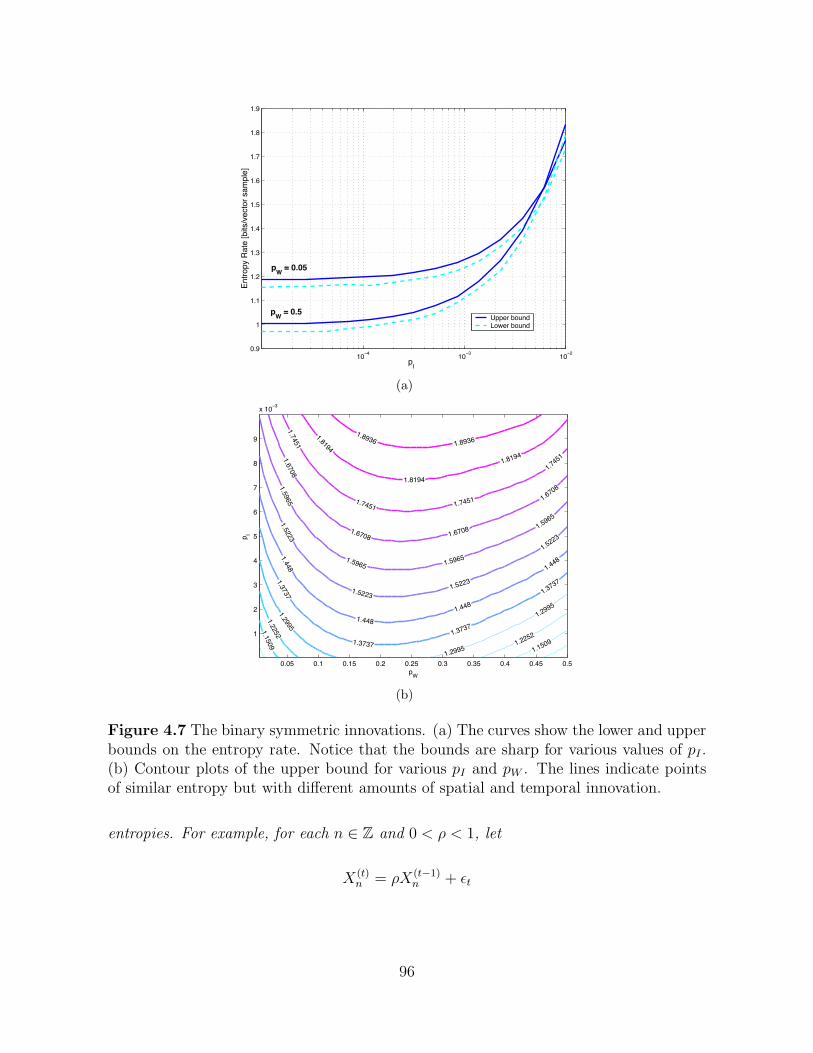
10−4 10−3 10−20.9
1
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
pI
Entro
py R
ate
[bits
/vec
tor s
ampl
e]
Upper boundLower bound
pW = 0.05
pW = 0.5
(a)
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
1
2
3
4
5
6
7
8
9
x 10−3
pW
p I
1.1509
1.2252
1.2252
1.2995
1.2995
1.2995
1.3737
1.37371.3737
1.3737
1.448
1.4481.448
1.448
1.5223
1.52231.5223
1.52231.5965
1.5965 1.5965
1.59651.6708
1.6708 1.6708
1.6708
1.7451
1.7451 1.7451
1.7451
1.81941.8194
1.8194
1.8936 1.8936
1.1509
(b)
Figure 4.7 The binary symmetric innovations. (a) The curves show the lower and upperbounds on the entropy rate. Notice that the bounds are sharp for various values of pI .(b) Contour plots of the upper bound for various pI and pW . The lines indicate pointsof similar entropy but with different amounts of spatial and temporal innovation.
entropies. For example, for each n ∈ Z and 0 < ρ < 1, let
X(t)n = ρX(t−1)
n + εt
96
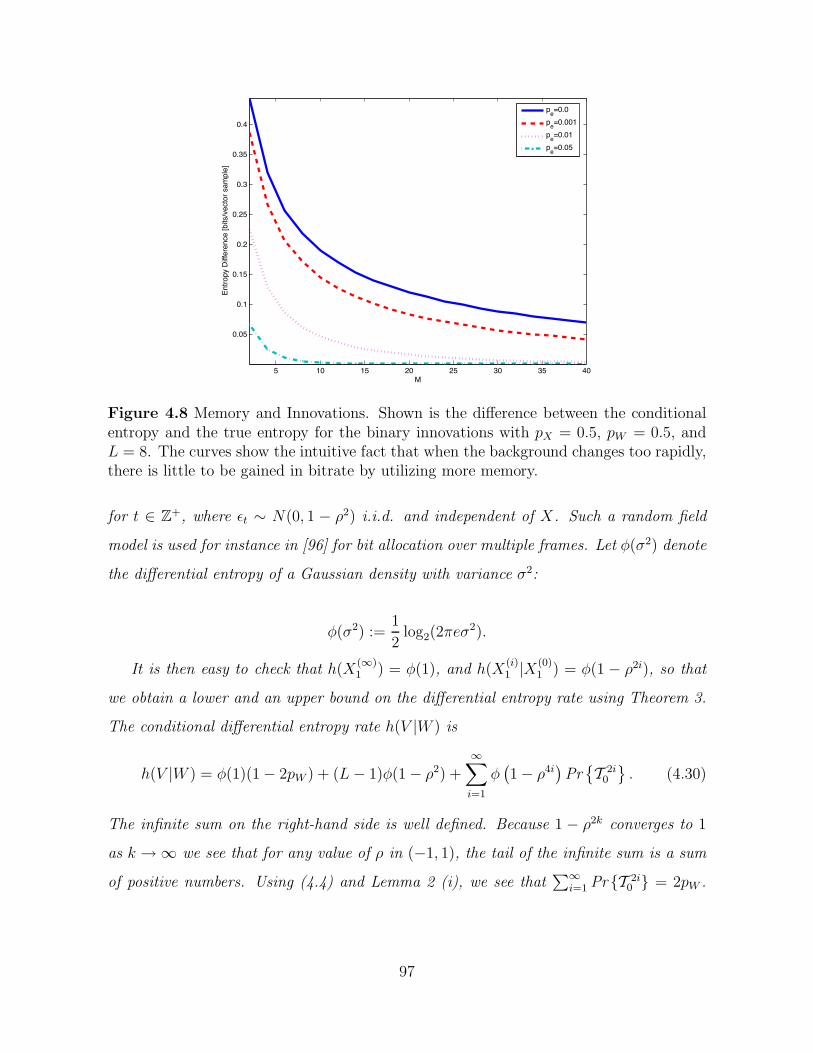
5 10 15 20 25 30 35 40
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
M
Entro
py D
iffer
ence
[bits
/vec
tor s
ampl
e]
pe=0.0pe=0.001pe=0.01pe=0.05
Figure 4.8 Memory and Innovations. Shown is the difference between the conditionalentropy and the true entropy for the binary innovations with pX = 0.5, pW = 0.5, andL = 8. The curves show the intuitive fact that when the background changes too rapidly,there is little to be gained in bitrate by utilizing more memory.
for t ∈ Z+, where εt ∼ N(0, 1 − ρ2) i.i.d. and independent of X. Such a random field
model is used for instance in [96] for bit allocation over multiple frames. Let φ(σ2) denote
the differential entropy of a Gaussian density with variance σ2:
φ(σ2) :=1
2log2(2πeσ
2).
It is then easy to check that h(X(∞)1 ) = φ(1), and h(X(i)
1 |X(0)1 ) = φ(1 − ρ2i), so that
we obtain a lower and an upper bound on the differential entropy rate using Theorem 3.
The conditional differential entropy rate h(V |W ) is
h(V |W ) = φ(1)(1 − 2pW ) + (L − 1)φ(1 − ρ2) +∞∑
i=1
φ(1 − ρ4i
)Pr
{T 2i
0
}. (4.30)
The infinite sum on the right-hand side is well defined. Because 1 − ρ2k converges to 1
as k → ∞ we see that for any value of ρ in (−1, 1), the tail of the infinite sum is a sum
of positive numbers. Using (4.4) and Lemma 2 (i), we see that∑∞
i=1 Pr {T 2i0 } = 2pW .
97

Because φ(·) is concave, we can use Jensen’s inequality as follows:
∞∑
k=1
φ(1 − ρ4k)Pr{T 2k
0
}= 2pW
∞∑
k=1
φ(1 − ρ4k)Pr
{T 2k
0
}
2pW
≤ 2pWφ
(∞∑
k=1
(1 − ρ4k)Pr
{T 2k
0
}
2pW
)
.
Using Lemma 2 (ii) and the generating function for the Catalan numbers [97], one
can further check that
∞∑
k=1
(1 − ρ4k)Pr{T 2k
0
}= ((1 − 4(1 − pW )pWρ
4))1/2 − (1 − 2pW ),
so that the last term is controlled by
∞∑
k=1
φ(1 − ρ4k)Pr{T 2k
0
}≤ 2pWφ
((1 − 4(1 − pW )pWρ4)1/2 − (1 − 2pW )
2pW
). (4.31)
The above upper bound turns out to be a very good approximation of the infinite sum in
(4.30) when pW is close to 0, and when ρ is away from 1.
Notice that for L large and ρ close to 1, Pe and H(Pe) are small so that the bounds
in Theorem 3 are sharp. Figure 4.9 displays the bounds on the differential entropy as
a function of ρ. The bounds are computed following Theorem 3 and (4.30). Here Pe
is inferred via Monte Carlo simulation with 107 trials, and a minimum MSE detector
for Wt. The inferred Pe is so low that the lower and upper bounds practically coincide.
Analytical computation of Pe is a detection problem beyond the scope of this dissertation.
4.4.2 Lossy information rates for the AR(1) random field
Consider the AR(1) innovations of the previous example. Under the MSE distortion
metric it is possible to derive an upper bound to the lossy information rate. The key is
to compute RV t|W t(D) defined as in (4.19) and use the upper bound [94]:
RV t(D) ≤ H(pW ) + RV t|W t(D), (4.32)
98

10−3 10−2 10−1−20
−15
−10
−5
0
5
10
1−ρ2
Diff.
Ent
ropy
Rat
e [b
its/v
ecto
r sam
ple]
Upper Bound
Lower Bound
pW=0.05
pW=0.5
Figure 4.9 Differential entropy bounds for the Gaussian AR(1) case as function of theinnovation parameter ρ. In this example Pe is small enough that the lower and upperbounds practically coincide. Note that the slope of the differential entropy curve isinfluenced by the value of pW .
for each t > 0. The conditional rate-distortion satisfies the Shannon lower bound (SLB)
[83]:
RV t|W t(D) ≥ h(V t|W t)
t− Lφ(D). (4.33)
The key observation is that for a given fixed trajectory wt, the rate-distortion function
of V t is that of a Gaussian vector consisting of the samples of the random field covered
by W t. For a Gaussian vector, the SLB is tight when the per sample distortion is less
than the minimum eigenvalue of the covariance matrix (see [83, p. 111]). The next
proposition gives a condition under which (4.33) is tight, and thus when combined with
(4.32) provides an upper bound on the rate-distortion function.
Proposition 12 Consider the vector process V resulting from the Gaussian AR(1) ran-
dom field with correlation coefficient 0 < ρ < 1, and a Bernoulli random walk with prob-
ability pW ≤ 1/2. The Shannon lower bound for the conditional rate-distortion function
is tight whenever the distortion satisfies
0 < D <1 − ρ1 + ρ
. (4.34)
99

Proof. To assert the claim we rely on the following lemmas:
Lemma 4 Let X1, X2, . . . , Xm be a sequence of Gaussian vectors in Rd such that Xj ∼
N(0, Cj), and where each Cj has spectrum λ(Cj). Let W be a random variable indepen-
dent of X1, . . . , Xm such that Pr {W = j} = µj for j = 1, . . . , m. Consider the mixture
X =m∑
j=1
I{W=j}Xj.
Denote by RX|W (D) the conditional rate-distortion with per-sample MSE distortion D.
Then, if
D ≤ minm⋃
j=1
λ(Cj),
the conditional rate distortion function is
RX|W (D) =m∑
j=1
µjRXj(D).
Proof. Let p(X, X|W ) be such that d−1 E‖X − X‖2 ≤ D. Then,
I(X; X|W ) =m∑
j=1
µjI(X; X|W = j) (4.35)
≥m∑
j=1
µjRXj(Dj) (4.36)
with
d−1E‖X − X‖2 =
m∑
j=1
µjDj ≤ D,
and Dj := d−1 E(‖X − X‖2|W = j). The above is minimized when
R′Xj
(Dj) = θ,
where θ is some constant. Suppose D ≤ min⋃m
j=1 λ(Cj) and Dj = D. We have
RXj(Dj) =
1
d
d∑
p=1
1
2log2(
λj,p
D),
100

where λj,p are the eigenvalues of Cj and moreover R′Xj
(Dj) = −1/D so that conditions
for a minimum are satisfied. The lower bound can be attained by setting
p(X, X|W = j) = p∗j(X, X),
where p∗j(Xj , Xj) attains RXj(Dj). !
Lemma 5 ([98, p. 189]) Let A be a n×n Hemitian matrix, and let 1 ≤ m ≤ n. Let Am
denote a principal submatrix of A, obtained by deleting n−m rows and the corresponding
columns of A. Then, for each integer k such that 1 ≤ k ≤ m, we have
λk(A) ≤ λk(Ak), (4.37)
where λk(A) denotes the k-th largest eigenvalue of matrix A.
Proof of Proposition 12: The SLB for each t > 0 is given by
RV t|W t(D) ≥ h(V t|W t)
t− Lφ(D). (4.38)
Because
I(V t; V t|W t) =∑
W t=wt
Pr{W t = wt
}I(V t; V t|W t = wt),
in view of Lemma 4, it suffices to show that for each t > 0, and for 0 ≤ D ≤ 1−ρ1+ρ , the
boundI(V t; V t|wt)
t≥ h(V t|wt)
t− Lφ(D), for E(d(V t, V t)|wt) ≤ D
is achievable. Given W t = wt, the above bound is attainable if D is smaller than the
minimum eigenvalue of the covariance matrix of the random field samples covered by wt.
Denote this covariance by Cwt := Cov(V t|wt). Because the random field is independent
in the spatial dimension n, the spectrum of the covariance matrix is the disjoint union
of the spectra of the covariance matrices corresponding to the random field samples of
V t at similar location n. Each Cwt is a submatrix of the t× t Toeplitz matrix Tt(ρ) with
101

entries [Tt(ρ)]ij = ρ|i−j|. Since λmin(Tt(ρ)) decreases to (1 − ρ)/(1 + ρ) as t → ∞ [99],
by applying the Lemma above we conclude that
λmin(Cwt) ≥ λmin(Tt(ρ)) ≥1 − ρ1 + ρ
. (4.39)
Therefore, the bound (4.38) is achievable for each t and since the limit of RV t|W t(D)
exists it follows that the bound is achievable for t → ∞. !
Example 8 We simulate the AR(1) dynamic reality model. To compress the process
V t, we estimate the trajectory and send it as side information. With the trajectory at
hand, we encode the samples with DPCM, encoding the residual with entropy constrained
scalar quantization (ECSQ). We build two encoders. In the first one, prediction is done
utilizing only the previously encoded vector sample; in the second, all encoded samples
up to time t are available to the encoder (and decoder). Figure 4.10 illustrates the SNR
as a function of rate when the block-length L = 8. In Figure 4.10 (a) and (b) we have
ρ = 0.99 and the upper bound is valid for SNR greater than 23 dB. In Figure 4.10 (a),
we have pW = 0.5. Because the scene changes slowly and is highly recurrent, the infinite
memory encoder (M = ∞) is about 3.5 dB better than when M = 1. The same behavior
is not observed when the scene is not recurrent (panning case, pW = 0.1, Figure 4.10 (b)
), and when the background changes too rapidly (ρ = 0.9, Figure 4.10 (c)).
4.5 The Recording Reality Case
In some applications, not only the samples of the POF are available, but also the loca-
tion of those samples. Consider the vector process in Definition 3, where X is stationary
taking values on a finite alphabet. Suppose that the position information is available.
In this case, the encoder has access to (Vt, Wt) for each t. In such scenario, usually the
goal is not to reproduce (Vt, Wt) at the decoder, but rather to reconstruct the underlying
scene X. This coding problem is the one encountered for example in the compression of
lightfields (see e.g., [100]).
102

1 1.5 2 2.5 3 3.5 4 4.5 5
10
15
20
25
30
35
40
45
50
Rate [bits/sample]
SNR
[dB]
RUB(D), pW = 0.5, ρ = 0.99 , L=6DPCM & ECSQ, M=∞DPCM & ECSQ, M=1
(a)
1 1.5 2 2.5 3 3.5 4 4.5 5
10
15
20
25
30
35
40
45
50
Rate [bits/sample]
SNR
[dB]
RUB(D), pW = 0.1, ρ = 0.99 , L=6DPCM & ECSQ, M=∞DPCM & ECSQ, M=1
(b)
1 1.5 2 2.5 3 3.5 4 4.5 5
10
15
20
25
30
35
40
Rate [bits/sample]
SNR
[dB]
RUB(D), pW = 0.5, ρ = 0.9 , L=6DPCM & ECSQ, M=∞DPCM & ECSQ, M=1
(c)
Figure 4.10 Performance of DPCM with motion for various ρ and pW . For ρ = 0.99 andρ = 0.9 the upper bound is valid for SNR greater than 23 dB and 12.8 dB, respectively.(a) Memory provide considerable gains, pW = 0.5, ρ = 0.99. (b) Modest gains whenpW = 0.1. (c) Modest gains when ρ = 0.9, as background changes too rapidly.
Because the scene is assumed to be static, only the positions corresponding to new
states need to be transmitted. These states correspond to new visual information being
“seen” by a camera for the first time. It is thus natural to define the sequence of times
that the camera moves into a new location:2
t0 = 0
tj = min{t > tj−1 : Wt *= Wi, 0 ≤ i < tj−1}, for j > 0.
2In probability theory parlance, those are in fact stopping times for the standard filtration generatedby W .
103

The above sequence of stopping times enables us to define the corresponding process of
interest:
Z =(
Zj := (Vtj , Wtj) : j ∈ Z+). (4.40)
The process Z is the subvector process consisting of the samples that contain new spatial
information. We seek to characterize the entropy rate of Z, defined as
H(Z) = limj→∞
1
jH(Z0, Z1, . . . , Zj).
We show next that despite the randomness of the trajectory W , the entropy rate of
the process Z is that of the underlying process X. That is, even in the worst case of a
random trajectory, there is no increase in the entropy rate due to random camera motion.
Theorem 4 Consider the vector process V where the process X is stationary and takes
values on a finite alphabet X . Let Z =(
Zj := (Vtj , Wtj ) : j ∈ Z+), and denote by H(X)
the entropy rate of the process X. Then,
H(Z) = H(X).
Proof.
Denote Wj = Wtj and Vj = Vtj . Assume without loss of generality that V0 is known
to the decoder. Then, for each j,
H(Zj) = H(W j) + H(V j|W j) (4.41)
= H(W j) + H(X1, . . . , Xj). (4.42)
The last equality holds because conditional on W j , each entry of V j contains a single
new sample of X. So, it suffices to assert that
limj→∞
1
jH(W0, . . . , Wj) = 0.
Let Nj = Wj−1−Wj and denote Nj = Ntj . Then, there is a one-to-one correspondence
between W j and N j so that
H(W0, . . . , Wj) = H(N0, . . . , Nj).
104

To check that j−1 H(N0, . . . , Nj) converges to 0, it suffices to show that H(Nj|N j−10 ) =
H(Nj|Nj−1) converges to zero (see [86, p. 64]). This conditional entropy in turn depends
on the transitional probability Pr{Nj |Nj−1
}. The transition probabilities are similar
to the ones in the Gambler’s ruin calculation done for example in [85]. This gives for
pW < 1/2,
Pr{Nj = −1|Nj−1 = 1
}=αj − αj+1
1 − αj+1, and Pr
{Nj = 1|Nj−1 = −1
}=α−j − α−j−1
1 − α−j−1,
where α := pW
1−pW. For pW = 1/2, then
Pr{
Nj = −1|Nj−1 = 1}
= Pr{Nj = 1|Nj−1 = −1
}=
1
j + 1.
So, for 0 ≤ pW ≤ 1/2, both transition probabilities converge to zero when j goes
to infinity, and by continuity, we have that limj→∞ H(Nj|Nj−1) = 0, which asserts the
claim. !
Remark 11 Note that if the trajectory W is deterministic, then the result is obvious.
What Theorem 4 shows is that the same holds even in the case where the trajectory is
random.
Remark 12 The result is also very similar to the rate-distortion problem for remote
sources considered in [83]. In this case the random walk can be seen as a channel between
the wall and the encoder. However, the results in [83] deal with memoryless channels
only and thus are not directly applicable to the problem at hand.
To optimally code a random camera taking samples of the plenoptic function, one
needs an average rate of H(X) bits. Suppose that there is a code for X that attains the
entropy rate H(X). Then, to attain the entropy of Z, a code for the positions W that
has a zero rate on average is required. In the next section we propose a code for the
increments Nj with corresponding average code length that essentially attains the zero
entropy lower bound.
105

4.5.1 A possible code: Shannon + run-length
A code that essentially achieves the entropy rate for the process N is constructed.
For simplicity, we assume that pW = 1/2. The results for pW < 1/2 are analogous.
The process N is a time-varying first-order Markov process and its entropy rate is zero.
Notice that the Lempel-Ziv code is not necessarily optimal as the source is not stationary.
Our proposal uses a run-length code. In this case, we buffer the runs of equal symbols
(“left” or “right” corresponding to −1 or +1). The runs are then coded according to their
probability. Thus we can describe the code as follows: suppose J samples have already
been coded. Thus, we start buffering the samples NJ , NJ+1, etc., until NJ+r *= NJ .
Denote by C the random variable describing the next run of samples. Code C with a
Shannon code [86]. Thus, if C = c its codeword length is
lJ(c) = 6− log PJ(c)7.
From the Gambler’s ruin calculation, the probability of C samples in the next run,
given that J increments Nj where already coded, is
PJ(C) = P (NJ+C−1 *= NJ+C−2)J+C−2∏
j=J
P (Nj = Nj−1)
=1
J + C
C−2∏
j=0
J + j
J + j + 1
=1
J + C
J
J + C − 1. (4.43)
We will show this code has average bits per sample converging to zero as J grows
large. To prove this result, we need the following lemma:
Lemma 6 The function f(x) = log(x)/x is strictly decreasing for x > e.
Proof. Note that f ′(x) = (1 − log x)/x2 so that f ′(x) < 0 for x > e. !
This simple lemma is crucial in the proof of the next proposition.
106

Proposition 13 Consider the run-length-Shannon code for the increments Nj. Then
the average number of bits per run given that J increments have been coded goes to zero
as J → ∞ at a rate of O ((log J)2/J).
Proof. Denote the length in bits of a coded run of length C when J bits have been
coded by lJ(C). Then, using Lemma 6 we have
0 ≤ E
[lJ(C)
C
]≤ E
[1 + log 1/PJ(C)
C
]
=∑
C≥1
PJ(C) (1 + log(1/PJ(C)))
C
=∑
C≥1
1
C
J
(J + C)(J + C − 1)
(1 + log
(J + C)(J + C − 1)
J
)
≤∑
C≥1
1
C
J
(J + C − 1)2
(1 + log
(J + C − 1)2
J
)
=∑
C≥1
1
C
J
(J + C − 1)2
(1 + log J + 2 log
(J + C − 1)
J
)
=∑
C≥1
1
C
(J + J log J)
(J + C − 1)2+
2
CJ
log J+C−1J
(J + C − 1)2.
Now we prove that each of the terms in the right hand side converges to zero. The
first one gives
∑
C≥1
1
C
(J + J log J)
(J + C − 1)2= (J + J log J)
(1
J2+∑
C>1
1
C
1
(J + C − 1)2
)
≤ (J + J log J)
(1
J2+
∫
C≥1
1
C
1
(J + C − 1)2dC
)
= (J + J log J)
(1
J2+
1 − J + J log J
J(J − 1)2
),
where we have used the fact that the term in the summand is decreasing in C. The
majoring term goes to zero essentially as O((logJ)2J−1). For the second term we use
the inequality logx ≤ x − 1 for x > 0. This gives
107

∑
C≥1
2
CJ
log J+C−1J
(J + C − 1)2≤
∑
C≥1
2
C
C − 1
(J + C − 1)2
≤∫
C>1
2
C
C − 1
(J + C − 1)2dC
= 2J − 1 − log J
(J − 1)2,
which goes to zero as ∼ 1/J . Thus, we conclude that E
[lJ (C)
C
]goes to zero at least as
fast as O((log J)2J−1) !
4.5.2 Coding with a finite buffer
The code suggested in the previous section actually requires unbounded buffer sizes
(the runs can have arbitrarily large length). However, one may still get some bounds on
the average bits spent. Suppose we impose a limit on the complexity. That is, we let the
runs be no larger than some maximum value denoted by K. Then, the probability mass
function of the runs now is given by
P KJ (C) =
1
J + C
J
J + C − 1I{1≤C<K} +
J
J + KI{C≥K}. (4.44)
Following the previous development we can assign a Shannon “run-length” code based
on the above probabilities. Thus, when C ≥ K, we assign a run of size K with codeword
length according to its probability. A result similar to Proposition 13 can easily be
derived.
Proposition 14 Consider the Shannon run-length code with the runs bounded by K.
Then the average bit rate on the next run given that J bits have already been coded,
denoted by E
[lKJ (C)
C
], converges to 1/K as J → ∞.
Proof. Note that
E
[lKJ (C)
C
]≤
K∑
C=1
1 − log P KJ (C)
CP K
J (C) +J(1 − log J
J+K
)
K(J + K). (4.45)
108

The first term on the RHS converges to zero. To check that, we consider the maximum
inside the summand. We thus get:
K∑
C=1
1 − log P KJ (C)
CP K
J (C) ≤ KP KJ (1) − K
log P KJ (K)
KP K
J (K). (4.46)
Since for each K, P KJ (K) → 0 as J → ∞, and since x log x → 0 as x → 0, it
follows that the above converges to zero as fast as log J/J . Now, the second term clearly
converges to 1/K. Hence we conclude that
lim supJ→∞
E
[lKJ (C)
C
]≤ 1
K.
To get a lower bound, notice that when J is large, then 1/P KJ (K) approximates 1
from above, so that in turn log 1/P KJ (K) approximates 0 from above. Consequently, we
have that 6log 1/P KJ (K)7 = 1 for J large enough. Thus,
E
[lKJ (C)
C
]≥
K∑
C=1
−1 − log P KJ (C)
CP K
J (C) +J
K(J + K). (4.47)
The first term in the RHS goes to zero. To see that, consider the minimum inside the
summand. The second term in the RHS converges to 1/K. This leads to
1
K≤ lim inf
J→∞E
[lKJ (C)
C
]≤ lim sup
J→∞E
[lKJ (C)
C
]≤ 1
K,
which proves the proposition. !
The above proposition suggests that with sufficient memory, the proposed code can
be very close to the average length of the case where the complexity is not bounded.
We verify the results of Propositions 13 and 14 by simulating the Shannon code for
the run-lengths of new states with computer generated random walks. Thus we apply
our proposed code to several sample paths and average out the results. As Figure 4.11
indicates, in the case where the code has infinite resources, then the coded runs can be
arbitrarily large and consequently the average rate converges to zero, as Proposition 13
109

suggests. In the case where we limit the buffer size to K, the simulation shows the rate
converges to 1/K’, as predicted by Proposition 14.
101 102 103 1040
0.1
0.2
0.3
0.4
0.5
0.6
0.7
j
Aver
age
Rate
K=3K=5K=10K=50K=∞
Figure 4.11 The proposed code for the trajectory. The proposed code with buffer sizeK attains an entropy rate of roughly 1/K. Notice that when K is infinity, the codeattains the entropy rate bound as the number of samples j goes to infinity.
4.6 Conclusion
We have proposed a stochastic model for video that enables the precise computation
of information rates. For the static case, we provided lossless and lossy information rate
bounds that are tight in a number of interesting cases. In some scenarios, the theoretical
results support the ubiquitous hybrid coding paradigm of extracting motion and coding
a motion compensated sequence.
110

We extended the model to account for changes in the background scene, and com-
puted bounds for the lossless and lossy information rates for the particular case of AR(1)
innovations. The bounds for this “dynamic reality” are tight in some scenarios, namely
when the background scene changes slowly with time (i.e., ρ close to 1).
The model explains precisely how long-term motion prediction helps coding in both
static and dynamic cases. In the dynamic model, this is related to the two parameters
(pW , ρ) that symbolizes the rate of recurrence in motion and the rate of changes in
the scene. As (pW , ρ) → (0.5, 1), long term memory predictions result in significant
improvements (in excess of 3.5 dB). By contrast, if either ρ is away from 1, or if pW is
away from 0.5, long term memory brings very little improvement.
Although we developed the results for the Bernoulli random walk, the model can
be generalized to other random walks on Z and Z2. Our current work includes such
generalizations. It also includes estimating ρ and pW for real video signals and fitting
the model to such signals.
We have shown that the entropy of the POF in problems such as the light field reduces
to the entropy of the scene around it. To assert this, we have used a random walk model
and we have shown that the trajectory of the random walk eventually has zero entropy
rate. For the simple example of a 1-D camera and a Bernoulli random walk, we have
shown a simple code that attains the entropy bound.
111

CHAPTER 5
CONCLUSION AND FUTURE DIRECTIONS
5.1 Summary
In the introduction we emphasized that efficient representation of visual information
requires a good understanding and handling of geometrical structure. This is the case in
static images, as well as in motion pictures. We have examined several problems related
to geometrical visual representation, processing, and coding. In particular, the following
was accomplished:
• Digital multidimensional filters with directional vanishing moments were proposed,
and a new filter bank design criteria suitable for multidimensional expansion was
developed. This novel class of filters have the property of annihilating directional
edges in images. The associated filter design problem was studied and characterized.
A flexible design methodology was presented. Applications of the proposed filter
banks in the context of the contourlet transform have shown that the proposed
filters yield reconstructed images with fewer ringing artifacts and thus better visual
quality. Moreover, the proposed filters are shorter and less complex than those of
competing designs.
• The nonsubsampled contourlet transform was proposed. This transform is suit-
able for applications that can afford redundancy and complexity such as denoising,
enhancement, and curvature detection. The proposed construction was studied in
detail and a frame analysis was provided. A design method that allows for regular-
112

ity, as well as frame stability control and sharp frequency resolution, was proposed.
Our design not only ensures the regularity of the basis vectors, but it also ensures
the almost tightness of the associated frame operator, and it has a fast algorithm
that results in substantial computational savings. The proposed transform is shown
to outperform similar transforms such as curvelets and the undecimated wavelet
transform in image denoising via hard-thresholding. Moreover, when coupled with
a fairly simple denoising strategy based on soft-thresholding, the resulting denoising
algorithm performed similar to the more sophisticated denoising scheme of [60].
• A stochastic model to study the information rates of the plenoptic function was
proposed. In the two cases considered, namely that of video and that of light
field, information rates were derived. In the video case, the simplicity of the model
enabled us to compute precise information rates. To the best of our knowledge, ours
is the first model for video that attempts to compute the true information-theoretic
rate-distortion rather than the optimal rate-distortion performance of a particular
coding method. We proposed models for static and dynamic realities and computed
information rates for both models. The proposed methodology gives new insight
into the source coding problem associated with video. In particular, the model
provides a characterization of performance in the presence of long-term memory,
and it also supports the hybrid coding paradigm of compensating for motion prior
to predictive coding in the low distortion regime. In the light field case we have
shown that the entropy of the process of interest reduces to the entropy of the scene
around it. That is, when reconstruction of the scene is the primary objective, the
trajectory and motion of the camera become irrelevant for coding purposes. In our
model we have shown by means of a simple example how a run-length code can
essentially code the trajectories at an average code length close to zero.
We point out that geometry in the POF comes in the form of explicit modeling and
coding of camera positions. This is analogous to capturing edges in images using filters
with directional vanishing moments, or the nonsubsampled contourlet transform.
113

5.2 Future Directions
Exploiting and representing geometrical structure in digital data is a challenging and
active research task. The use of multidimensional filter banks such as the proposed DVM
filter bank, or the NSCT, to decorrelate visual data rich in geometrical structure is a very
promising approach. Moreover, the understanding of the POF in the form of video is
very important from a practical view point. Our proposed model for POF video is simple
and provides a framework in which rate-distortion type calculations can be done. In that
respect, our contribution offers a valuable new perspective with potential to influence
several aspects of video compression. In view of that, in the following we outline some
future research directions to take.
5.2.1 Filter banks with directional vanishing moments
Even though in this dissertation we focused on the use of DVM filters in conjunc-
tion with the contourlet transform, there are many other applications where filter banks
with DVM can be useful. For example, the DVM filters with the NSCT transform can
potentially provide a better complexity/performance tradeoff with better visual quality
in applications such as denoising. Moreover, in critically sampled transforms such as the
one in [39], the DVM filters will likely be a better alternative to filters designed with fre-
quency selectivity as the primary design criterion. The DVM filters can also be useful in
edge and curvature detection. In this case, one can use a multiscale decomposition such
as contourlets coupled with DVM filters to detect straight lines on a single scale. Notice
that since this is an analysis task, there is no need to impose perfect reconstruction and
as a result we can use filters with many DVMs.
5.2.2 The nonsubsampled contourlet transform
The NSCT is a very useful transform. We strongly believe the NSCT have potential
to redefine the state-of-the-art in several image processing applications. In denoising,
for instance, we anticipate that more sophisticated estimation techniques in the NSCT
114

w2
w1
(−π,−π)
(π,π)
Figure 5.1 The idealized analytic complex transform. The frame elements are supportedon the first and third quadrants of the frequency plane. The real and imaginary parts ofeach atom are supported in the whole plane following the dashed boundaries.
domain can lead to even better results. Such techniques will likely involve a better
statistical model for the distribution of the coefficients in the NSCT domain.
One shortcoming of the NSCT is that it can be highly redundant and complex. We
already discussed in Chapter 3 that an alternative to lower complexity is to use a critically
sampled directional filter bank. This alternative suffers from aliasing due to the tree-
structure. However, this aliasing can be substantially reduced by carefully designing
the filters in the DFB. Preliminary experiments with this approach indicate that when
denoising ultrasound images, the new fast NSCT performs similarly to the full NSCT,
but at a much reduced computational cost.
5.2.3 Complex contourlet transform
The greatest shortcoming of the NSCT is its increased redundancy. As alternative to
this shortcoming, we investigate possible ways of constructing a complex contourlet trans-
form (CCT). This alternative is akin the one offered by the complex wavelet transform
(CWT) [24, 101]. The CWT is almost shift-invariant, but it is much less redundant than
the nonsubsampled wavelet transform. The goal is to have a decomposition consisting of
complex filters resulting in the subband decomposition shown in Figure 5.1.
A CCT can be obtained using the Hilbert transformers of [102] as postprocessors.
This leads to a complex contourlet transform in which the basis elements have different
115

Figure 5.2 Complex contourlet transform basis functions (4 out of 8 directions shown).real and imaginary parts on top and bottom, respectively. Note the different symmetryof the real and imaginary parts.
orientations in addition to different symmetries. Such construction is more redundant
than the one in [103], but its filter design is much easier and it has the perfect recon-
struction property. This is not the case with the one proposed in [103].
Figure 5.2 shows the basis function (real and imaginary parts) at a coarse scale of the
proposed CCT.
The CCT can be a good deal less expensive alternative to the NSCT. In this direction,
we plan on investigating other applications where the CCT performs similarly to the
NSCT but at a much reduced cost.
5.2.4 Information rates of the plenoptic function
We have proposed a simple model to study the compression problem of visual scenes
in the presence of camera motion. The proposed model is powerful and already provides
further understanding of the video compression problem.
One of the missing points, however, is to use the model to make accurate predictions
with real video sources. The dynamic reality model proposed provides a realistic model
for video on very contrived scenarios. To account for the complexities observed on a
typical video sequence, the trajectory model should include random walks that are better
fits for typical motion vector trajectories. For example, one such model is to consider
116

2-D random walks in the Z2 lattice. Preliminary experiments on this direction indicate
that our model can indeed make valuable predictions. For instance, the model provides a
precise characterization of multiframe prediction and how it affects the bitrate. Further
experiments and conclusions in this direction are the goals of our future work.
117

REFERENCES
[1] S. Mallat, A Wavelet Tour of Signal Processing. London, UK: Academic Press,
1999.
[2] I. Daubechies, Ten Lectures on Wavelets. Philadelphia, PA: SIAM, 1992.
[3] J. Duffin and A. C. Schaefer, “A class of nonharmonic Fourier series,” Trans. Amer.
Math. Soc., vol. 72, pp. 341–366, 1952.
[4] M. J. T. Smith and T. P. B. III, “Exact reconstruction techniques for tree-
structured subband coders,” IEEE Trans. Acoust. Speech, and Signal Process.,
vol. 34, pp. 434–441, June 1986.
[5] F. Mintzer, “Filters for distortion-free two-band multirate filter banks,” IEEE
Trans. Acoust. Speech, and Signal Process., vol. 33, pp. 626–630, June 1985.
[6] M. Vetterli, “Filter banks allowing perfect reconstruction,” Signal Processing,
vol. 10, no. 3, pp. 219–244, 1986.
[7] P. P. Vaidyanathan, Multirate Systems and Filterbanks. Englewood Cliffs, NJ:
Prentice Hall, 1993.
[8] M. Vetterli and J. Kovacevic, Wavelets and Subband Coding. Englewood Cliffs,
NJ: Prentice Hall, 1995.
[9] G. Strang and T. Nguyen, Wavelets and Filter Banks. Wellesley, MA: Wellesley-
Cambridge Press, 1996.
118

[10] H. S. Malvar, Signal Processing with Lapped Transforms. Boston, MA: Artech
House, 1992.
[11] S. G. Mallat, “A theory for multiresolution signal decomposition: The wavelet
representation,” IEEE Trans. on Pattern Analysis and Machine Intelligence, vol.
PAMI-11, no. 7, pp. 674–693, 1989.
[12] Z. Cvetkovic and M. Vetterli, “Oversampled filter banks,” IEEE Trans. on Signal
Proc., vol. 46, no. 5, pp. 1245–1255, May 1998.
[13] H. Bolcskei, F. Hlawatsch, and H. G. Feichtinger, “Frame-theoretic analysis of
oversampled filter banks,” IEEE Trans. Signal Proc., vol. 46, no. 12, pp. 3256–
3268, December 1998.
[14] I. W. Selesnick, “The double density wavelet transform,” in Wavelet in Signal and
Image Analysis: From Theory to Practice, A. Petrosian and F. G. Meyer, Eds.
Norwell, MA: Kluwer, 2001.
[15] I. Daubechies, B. Han, A. Ron, and Z. Shen, “Framelets: MRA-based constructions
of wavelet frames,” Appl. Comput. Harmon. Anal., vol. 14, no. 1, pp. 1–46, 2003.
[16] E. L. Pennec and S. Mallat, “Sparse geometric image representation with ban-
delets,” IEEE Trans. Image Proc., vol. 14, no. 4, pp. 423–438, April 2005.
[17] G. Peyre and S. Mallat, “Surface compression with geometric bandelets,” ACM
Transactions on Graphics (SIGGRAPH’05), vol. 14, no. 3, pp. 601–608, 2005.
[18] M. B. Wakin, J. K. Romberg, H. Choi, and R. G. Baraniuk, “Wavelet-domain
approximation and compression of piecewise smooth images,” IEEE Trans. Image
Proc., vol. 15, no. 5, pp. 1071–1087, May 2006.
[19] D. L. Donoho, “Wedgelets: nearly minimax estimation of edges,” Ann. Statist.,
vol. 27, no. 3, pp. 859–897, 1999.
119

[20] M. N. Do and M. Vetterli, “The contourlet transform: An efficient directional
multiresolution image representation,” IEEE Trans. Image Proc., vol. 14, no. 12,
pp. 2091–2106, Dec. 2005.
[21] E. P. Simoncelli, W. T. Freeman, E. H. Adelson, and D. J. Heeger, “Shiftable
multiscale transforms,” IEEE Trans. Info. Theory, vol. 38, no. 2, pp. 587–607,
March 1992.
[22] R. H. Bamberger, “The directional filter bank: A multirate filter bank for the di-
rectional decomposition of images,” Ph.D. dissertation, Georgia Institute of Tech-
nology, 1990.
[23] R. H. Bamberger and M. J. T. Smith, “A filter bank for the directional decompo-
sition of images: Theory and design,” IEEE Trans. Signal Proc., vol. 40, no. 4, pp.
882–893, April 1992.
[24] N. G. Kingsbury, “Image processing with complex wavelets,” Phil. Trans. R. Soc.
Lond., vol. 357, no. 1760, pp. 2543–2560, Sept. 1999.
[25] P. J. Burt and E. H. Adelson, “The Laplacian pyramid as a compact image code,”
IEEE Trans. Communications, vol. 31, no. 4, pp. 532–540, April 1983.
[26] J.-X. Chai, S.-C. Chan, H.-Y. Shum, and X. Tong, “Plenoptic sampling,” in Pro-
ceedings of SIGGRAPH, 2000, pp. 307–318.
[27] M. N. Do, D. Marchand-Maillet, and M. Vetterli, “On the bandlimitedness of the
plenoptic function,” in Proceedings of the IEEE International Conference on Image
Processing (ICIP), vol. 3, Genoa, Italy, 2005, pp. 17–20.
[28] C. Zhang and T. Chen, “Spectral analysis for sampling image-based rendering
data,” IEEE Trans. on CSVT Special Issue on Image-Based Modeling, Rendering
and Animation, vol. 13, pp. 1038–1050, Nov. 2003.
120

[29] H.-Y. Shum, S. B. Kang, and S.-C. Chan, “Survey of image-based representations
and compression techniques,” IEEE Trans. on CSVT Special Issue on Image-Based
Modeling, Rendering and Animation, vol. 13, no. 11, pp. 1020–1037, Nov. 2003.
[30] M. Levoy and P. Hanrahan, “Light field rendering,” in Proceedings of SIGGRAPH,
1996, pp. 31–42.
[31] S. J. Gortler, R. Grzeszczuk, R. Szeliski, and M. Cohen, “The lumigraph,” in
Proceedings of SIGGRAPH, 1996, pp. 43–54.
[32] J. Kovacevic and M. Vetterli, “Nonseparable 2-dimensional and 3-dimensional
wavelets,” IEEE Trans. on Signal Proc., vol. 43, no. 5, pp. 1269–1273, May 1995.
[33] A. L. da Cunha and M. N. Do, “Bi-orthogonal filter banks with directional vanishing
moments,” in Proceedings of the IEEE ICASSP, vol. 4, Philadelphia, PA, 2005, pp.
553–556.
[34] A. L. da Cunha and M. N. Do, “On two-channel filter banks with directional
vanishing moments,” IEEE Trans. Image Proc., to be published, 2007.
[35] A. L. da Cunha and M. Do, “Linear-phase filter design for directional multireso-
lution decompositions,” in Proc. of SPIE Conference on Wavelet Applications in
Signal and Image Processing XI, vol. 5914, San Diego, CA, July 2005, pp. 263–273.
[36] E. J. Candes and D. L. Donoho, “New tight frames of curvelets and optimal rep-
resentations of objects with piecewise C2 singularities,” Comm. Pure and Appl.
Math, vol. 57, no. 2, pp. 219–266, February 2004.
[37] M. N. Do and M. Vetterli, “Framing pyramids,” IEEE Trans. Signal Proc., vol. 51,
no. 9, pp. 2329 – 2342, Sept. 2003.
[38] M. N. Do, “Directional multiresolution image representations,” Ph.D. dissertation,
Swiss Federal Institute of Technology, Lausanne, Switzerland, December 2001.
121

[39] Y. Lu and M. Do, “Crisp-contourlet: A critically sampled directional multireso-
lution representation,” in Proc. SPIE Conf. on Wavelets X, San Diego, CA, Aug.
2003, pp. 655–665.
[40] V. Velisavljevic, B. Beferull-Lozano, M. Vetterli, and P. L. Dragotti, “Direction-
lets: Anisotropic multidirectional representation with separable filtering,” IEEE
Transactions on Image Processing, vol. 15, no. 7, pp. 1916–1933, July 2006.
[41] M. Vetterli, “Wavelets, approximation, and compression,” IEEE Signal Proc. Mag.,
vol. 18, pp. 59–73, Sept. 2001.
[42] A. Cohen and I. Daubechies, “Non-separable bidimensional wavelet bases,” Rev.
Math. Iberoamer, vol. 9, no. 1, pp. 51–137, 1992.
[43] J. Kovacevic and M. Vetterli, “Nonseparable multidimensional perfect reconstruc-
tion filter banks and wavelet bases for Rn,” IEEE Trans. Information Theory,
vol. 38, no. 2, pp. 533–555, March 1992.
[44] E. Viscito and J. P. Allebach, “The analysis and design of multidimensional FIR
perfect reconstruction filter banks for arbitrary sampling lattices,” IEEE Trans.
Circuits and Systems, vol. 38, no. 1, pp. 29–41, Jan. 1991.
[45] M. Vetterli, “Multi-dimensional subband coding: Some theory and algorithms,”
Signal Processing, vol. 6, no. 2, pp. 97–112, 1984.
[46] M. Vetterli and C. Herley, “Wavelets and filter banks: Theory and design,” IEEE
Trans. on Signal Proc., vol. 40, pp. 2207–2232, Sept. 1992.
[47] R. Ansari, C. W. Kim, and M. Dedovic, “Structure and design of two-channel filter
banks derived from a triplet of halfband filters,” IEEE Trans. CAS-II, vol. 46,
no. 12, pp. 1487–1496, December 1999.
[48] D. Wei and S. Guo, “A new approach to the design of multidimensional nonsepara-
ble two-channel orthonormal filter banks and wavelets,” IEEE Signal Proc. Letters,
vol. 7, no. 11, pp. 327–330, November 2000.
122

[49] D. B. H. Tay and N. G. Kingsbury, “Flexible design of multidimensional perfect
reconstruction FIR 2-band filters using transformation of variables,” IEEE Trans.
Image Proc., vol. 2, no. 4, pp. 466–480, October 1993.
[50] S.-M. Phoong, C. W. Kim, P. P. Vaidyanathan, and R. Ansari, “A new class of
two-channel biorthogonal filter banks and wavelet bases,” IEEE Trans. on Signal
Proc., vol. 43, no. 3, pp. 649–661, March 1995.
[51] D. Stanhill and Y. Y. Zeevi, “Two-dimensional orthogonal wavelets with vanishing
moments,” IEEE Trans. Signal Proc., vol. 44, no. 10, pp. 2579–2590, October 1996.
[52] D. B. H. Tay, “Design of filter banks/wavelets using TROV: A survey,” Digital
Signal Processing, vol. 7, no. 4, pp. 229–238, Oct. 1997.
[53] A. L. da Cunha, J. Zhou, and M. Do, “The nonsubsampled contourlet transform:
Theory, design, and applications,” IEEE Trans. Img. Proc., vol. 15, no. 10, pp.
3089–3101, Oct. 2006.
[54] A. L. da Cunha, J. Zhou, and M. Do, “The nonsubsampled contourlet transform:
Filter design and application in denoising,” in Proceedings of the IEEE Interna-
tional Conference on Image Processing (ICIP), vol. 1, Genoa, Italy, 2005, pp. 749–
752.
[55] J. Zhou, A. L. da Cunha, and M. Do, “The nonsubsampled contourlet transform:
Construction and application in enhancement,” in Proceedings of the IEEE Inter-
national Conference on Image Processing (ICIP), vol. 1, Genoa, Italy, 2005, pp.
469–472.
[56] J. G. Daugman, “Uncertainty relation for resolution in space, spatial frequency,
and orientation optimized by two-dimensional visual cortical filters,” J. Opt. Soc.
Am. A, vol. 2, no. 7, pp. 1160–1169, July 1985.
123

[57] R. R. Coifman and D. L. Donoho, “Translation invariant de-noising,” in Wavelets
and Statistics, A. Antoniadis and G. Oppenheim, Eds. New York: Springer-Verlag,
1995, pp. 125–150.
[58] S. G. Chang, B. Yu, and M. Vetterli, “Adaptive wavelet thresholding for image
denoising and compression,” IEEE Trans. Image Proc., vol. 9, no. 9, pp. 1532–
1546, September 2000.
[59] L. Sendur and I. W. Selesnick, “Bivariate shrinkage with local variance estimation,”
IEEE Signal Proc. Letters, vol. 9, no. 12, pp. 438–441, December 2002.
[60] J. Portilla, V. Strela, M. J. Wainwright, and E. P. Simoncelli, “Image denoising
using scale mixtures of Gaussians in the wavelet domain,” IEEE Trans. Image
Proc., vol. 12, no. 11, pp. 1338–1351, 2003.
[61] M. J. Shensa, “The discrete wavelet transform: Wedding the a trous and Mallat
algorithms,” IEEE Trans. Signal Proc., vol. 40, no. 10, pp. 2464–2482, October
1992.
[62] J. L. Starck, F. Murtagh, and A. Bijaoui, Image Processing and Data Analysis.
New York, NY: Cambridge University Press, 1998.
[63] J. H. McClellan, “The design of two-dimensional digital filters by transformation,”
in Proc. 7th Annual Princeton Conf. Information Sciences and Systems, Princeton,
NJ, 1973, pp. 247–251.
[64] S. Mitra and R. Sherwood, “Digital ladder networks,” IEEE Trans. on Audio and
Electroacoustics, vol. AU-21, no. 1, pp. 30–36, February 1973.
[65] W. Sweldens, “The lifting scheme: A custom-design construction of biorthogonal
wavelets,” Appl. Comput. Harmon. Anal., vol. 3, no. 2, pp. 186–200, 1996.
[66] R. E. Blahut, Fast Algorithms for Digital Signal Processing. Reading, MA:
Addison-Wesley, 1985.
124

[67] R. Jia, “Approximation properties of multivariate wavelets,” Mathematics of Com-
putation, vol. 67, pp. 647–665, 1998.
[68] T. Cooklev, T. Yoshida, and A. Nishihara, “Maximally flat half-band diamond-
shaped FIR filters using the Bernstein polynomial,” IEEE Trans. CAS-II, vol. 40,
no. 11, pp. 749–751, Nov. 1993.
[69] J.-L. Starck, E. J. Candes, and D. L. Donoho, “The curvelet transform for image
denoising,” IEEE Trans. Image Proc., vol. 11, no. 6, pp. 670–684, June 2002.
[70] D. D.-Y. Po and M. N. Do, “Directional multiscale modeling of images using the
contourlet transform,” IEEE Trans. Img Proc., vol. 15, no. 6, pp. 1610–1620, June
2006.
[71] S. G. Chang, B. Yu, and M. Vetterli, “Spatially adaptive wavelet thresholding with
context modeling for image denoising,” IEEE Trans. Image Proc., vol. 9, no. 9, pp.
1522–1531, September 2000.
[72] A. L. da Cunha, M. N. Do, and M. Vetterli, “On the information rates of the
plenoptic function,” in Proceedings of the IEEE International Conference on Image
Processing (ICIP), Atlanta, GA, 2006, pp. 2489–2492.
[73] A. L. da Cunha, M. N. Do, and M. Vetterli, “A stochastic model for video and its
information rates,” in Prof. of IEEE Data Compression Conference (DCC), March
2007, pp. 3–12.
[74] E. H. Adelson and J. R. Bergen, “The plenoptic function and the elements of
early vision,” in Computational Models of Visual Processing, M. Landy and J. A.
Movshon, Eds. Cambridge, UK: MIT Press, 1991, pp. 3–20.
[75] D. Forsyth and J. Ponce, Computer Vision: A Modern Approach. Englewood
Cliffs, NY: Prentice Hall, 2002.
125

[76] C. Zhang and T. Chen, “A survey on image-based rendering representation,
sampling and compression,” EURASIP Signal Processing: Image Communication,
vol. 19, pp. 1–28, Jan. 2004.
[77] L.-W. He and H.-Y. Shum, “Rendering with concentric mosaics,” in Proceedings of
SIGGRAPH, 1999, pp. 299–306.
[78] A. Telkap, Digital Video Processing. Upper Saddle River, NJ: Prentice-Hall, 1995.
[79] B. Girod, “The efficiency of motion-compensating prediction for hybrid coding of
video sequences,” IEEE Journal of Selected Areas in Communications, vol. SAC-5,
no. 7, pp. 1140–1154, August 1987.
[80] P. Ramanathan and B. Girod, “Rate-distortion analysis for light field coding and
streaming,” EURASIP Signal Processing: Image Communication, vol. 21, no. 6,
pp. 462–475, July 2006.
[81] N. Gehrig and P. L. Dragotti, “Distributed compression of the plenoptic function,”
in Proc. IEEE Int. Conf. on Image Proc., vol. 1, Singapore, 2004, pp. 529–532.
[82] P. Ramanathan and B. Girod, “Receiver-driven rate-distortion optimized streaming
of light fields,” in Proc. IEEE International Conference on Image Processing, vol. 3,
Genoa, Italy, 2005, pp. 25–28.
[83] T. Berger, Rate-Distortion Theory: A Mathematical Basis for Data Compression.
Englewood Cliffs, NJ: Prentice-Hall, 1972.
[84] J. Rudnick and G. Gaspari, Elements of the Random Walk. Cambridge, UK:
Cambridge University Press, 2004.
[85] W. Feller, An Introduction to Probability Theory and Its Applications. New York,
NY: John Wiley and Sons, 1957.
[86] T. M. Cover and J. A. Thomas, Elements of Information Theory. New York, NY:
John Wiley & Sons, 1991.
126

[87] H. Li and R. Forchheimer, “Extended signal-theoretic techniques for very low bit-
rate video coding,” in Video Coding: The Second Generation Approach. Norwell,
MA: Kluwer, 1996, pp. 383–428.
[88] T. Wiegand, X. Zhang, and B. Girod, “Long-term memory motion-compensated
prediction,” IEEE Trans. CSVT, vol. 9, no. 1, pp. 70–84, February 1999.
[89] C. Herley, “ARGOS: Automatically extracting repeating objects from multimedia
streams,” IEEE Trans. on Multimedia, vol. 8, no. 1, pp. 115–129, Feb 2006.
[90] N. Vasconelos and A. Lippman, “Library-based image coding,” in Proc. IEEE Int.
Conf. Acoust., Speech, and Signal Proc., vol. 5, Adelaide, Australia, April 1994,
pp. 489–492.
[91] J. Ziv and A. Lempel, “Compression of individual sequences via variable-rate cod-
ing,” IEEE Transactions on Information Theory, vol. 24, no. 5, pp. 530–536, Sept.
1978.
[92] Y. Steinberg and M. Gutman, “An algorithm for source coding subject to a fidelity
criterion, based on string matching,” IEEE Trans. Inf. Theory, vol. 39, no. 3, pp.
877–886, May 1993.
[93] M. S. Pinsker, Information and Information Stability of Random Variables. San
Francisco, CA: Holden Day, 1984.
[94] R. M. Gray, “A new class of lower bounds to information rates of stationary sources
via conditional rate-distortion functions,” IEEE Trans. on Info. Theory, vol. IT-19,
no. 4, pp. 480–489, July 1973.
[95] R. M. Gray, Entropy and Information Theory. New York: Springer-Verlag, 1990.
[96] Y. Sermadevi, J. Chen, S. Hemami, and T. Berger, “When is bit allocation for
predictive video coding easy?” in Data Compression Conference (DCC), Snowbird,
UT, 2005, pp. 289–298.
127

[97] R. L. Graham, D. E. Knuth, and O. Patashnik, Concrete Mathematics: A Foun-
dation for Computer Science. Boston, MA: Addison-Wesley Longman Publishing
Co., Inc., 1989.
[98] R. A. Horn and C. R. Johnson, Matrix Analysis. Cambridge, UK: Cambridge
Univ. Press, 1999.
[99] R. M. Gray, “On the asymptotic eigen-value distribution of Toeplitz matrices,”
IEEE Trans. Inf. Theory, vol. 18, no. 6, pp. 725–730, 1972.
[100] M. Magnor and B. Girod, “Data compression for light-field rendering,” IEEE
Transactions on CSVT, vol. 10, no. 3, pp. 338–343, 2000.
[101] I. W. Selesnick, R. G. Baraniuk, and N. G. Kingsbury, “The dual-tree complex
wavelet transform,” IEEE Signal Proc. Mag., vol. 22, no. 6, pp. 123–151, Nov.
2005.
[102] F. C. A. Fernandes, R. L. C. van Spaendonck, and C. S. Burrus, “A new framework
for complex wavelet transforms,” IEEE Trans. Sign. Proc., vol. 51, no. 7, pp. 1825–
1837, July 2003.
[103] T. T. Nguyen and S. Oraintara, “Shift-invariant multiscale multidirectional image
decomposition,” in Proc. of IEEE ICASSP, vol. 2, Toulouse, France, 2006, pp.
153–156.
128

![[GAGIS]A Hierarchical Representation and Computation Scheme of Arbitrary-dimensional Geometrical Primitives Based on CGA](https://img.pdfslide.net/doc/110x75/58ae2b801a28ab557e8b4cb7/gagisa-hierarchical-representation-and-computation-scheme-of-arbitrary-dimensional.jpg)



























