Embed Size (px)
Citation preview
GESAC, Inc
Development of Abdomen Compression Measurement Sensors
T. Shams, N. Rangarajan, J. Rowe, H. Conner
GESAC, Inc
October 28, 2007 Thirty-Fifth International Workshop
2
GESAC, Inc
Outline
• Usefulness of compression as injury measure– some limitations of current methods
• Exploring alternative measurement methods• Hall sensors
– packaging, calibration, response
• Shape sensors• Flex sensors
– packaging, calibration, response
• Discussion• Current work
October 28, 2007 Thirty-Fifth International Workshop
3
GESAC, Inc
Measuring Abdomen Compression
• Compression measure important in abdomen injury assessment– Maximum compression, V.C, Vmax.Cmax
– (Cavanaugh, Viano, Rouhana, etc)
• Current measurement methods– Pressure (Mooney)
– Stringpots (e.g Thor)
– Fluid resistance (Rouhana)
• Limitations of current methods– relies on measuring deflections at a points
• may miss location of maximum deflection
• reliability under oblique loading may not be optimum
– no reliable method for measuring in children
October 28, 2007 Thirty-Fifth International Workshop
4
GESAC, Inc
Exploring Alternative Methods
• Looked at several alternative methods– Hall sensors
• They can measure relative rotations of a small section up to +/- 40 deg • Number of sensors can be used to measure deformation of linear strip
– Shape sensor• Measure displacement at end of flexible beam due to delay in
transmission of light beam
– Resistive flex sensors• Depends on change of resistivity when a flex sensor is bent• Can be used to measure average curvature of small sections
October 28, 2007 Thirty-Fifth International Workshop
5
GESAC, Inc
Hall Sensor-Description
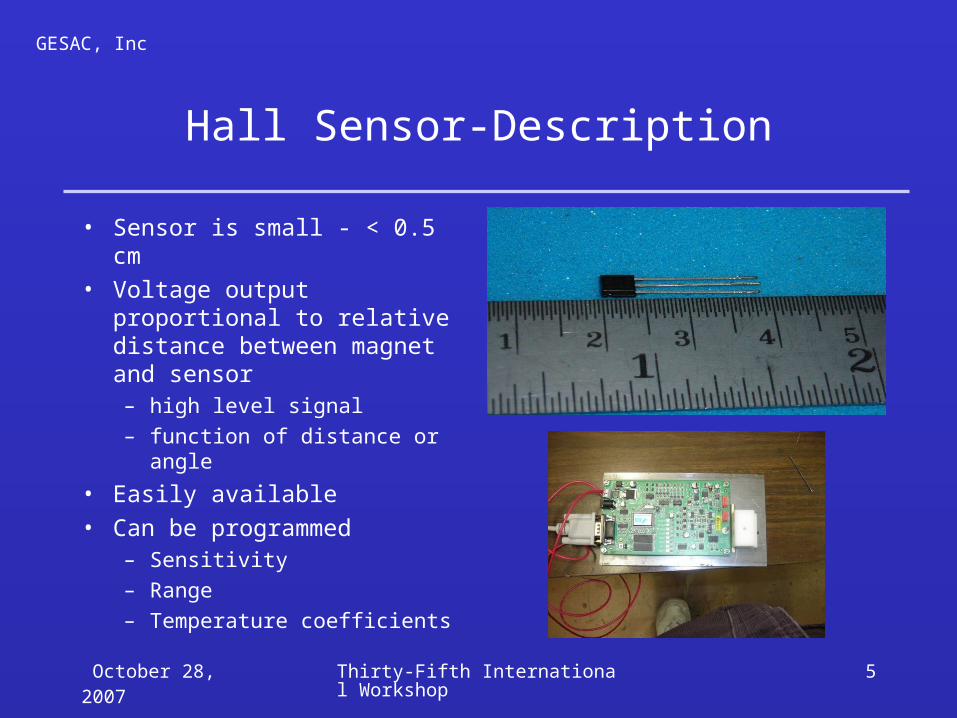
• Sensor is small - < 0.5 cm• Voltage output proportional
to relative distance between magnet and sensor– high level signal
– function of distance or angle
• Easily available• Can be programmed
– Sensitivity
– Range
– Temperature coefficients

October 28, 2007 Thirty-Fifth International Workshop
6
GESAC, Inc
Hall Sensor-Mounting & Calibration
• Evaluated sensor response for various geometries– Relative location
– Relative angle
• Decided on hinge mechanism for mounting sensor & magnet
• Developed calibration fixture for obtaining calibration data
October 28, 2007 Thirty-Fifth International Workshop
7
GESAC, Inc
Hall Sensor-Calibration Fit
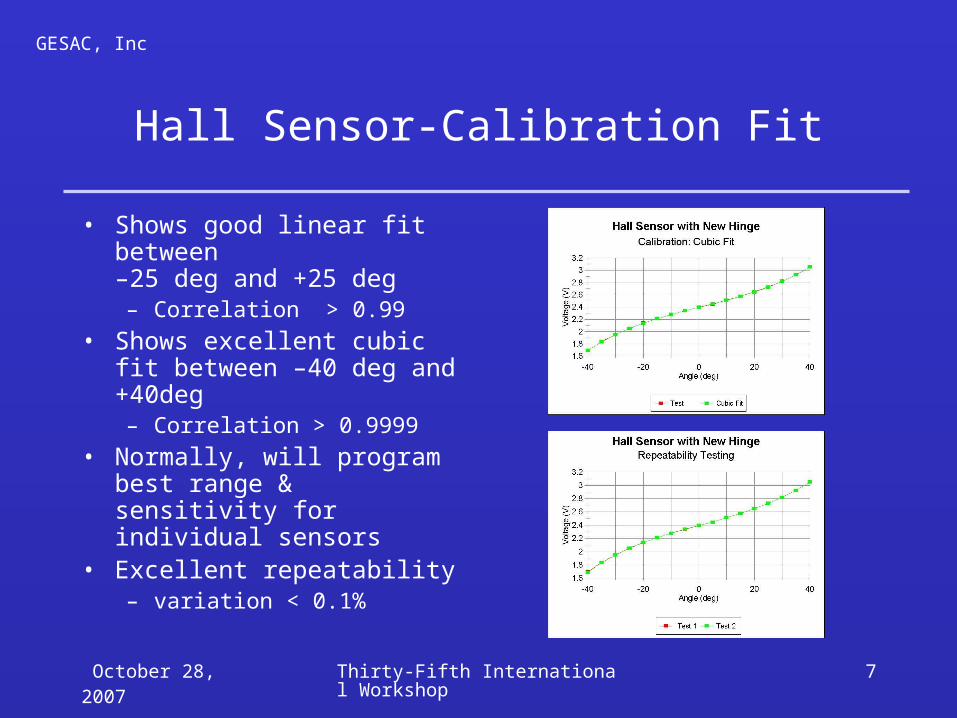
• Shows good linear fit between –25 deg and +25 deg– Correlation > 0.99
• Shows excellent cubic fit between –40 deg and +40deg– Correlation > 0.9999
• Normally, will program best range & sensitivity for individual sensors
• Excellent repeatability– variation < 0.1%
October 28, 2007 Thirty-Fifth International Workshop
8
GESAC, Inc
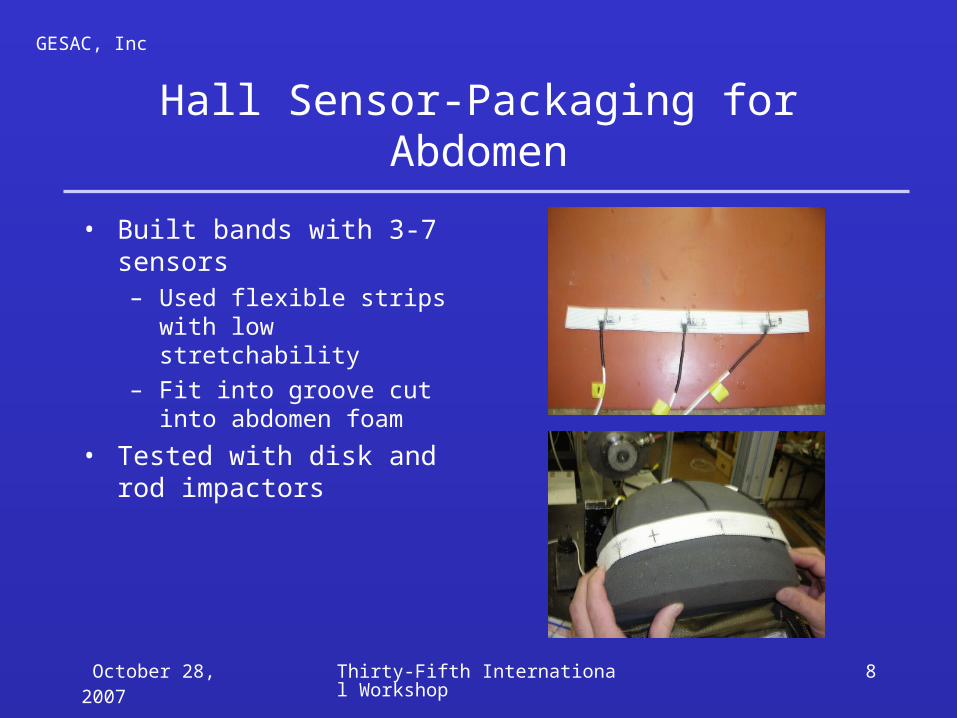
Hall Sensor-Packaging for Abdomen
• Built bands with 3-7 sensors– Used flexible strips with low
stretchability
– Fit into groove cut into abdomen foam
• Tested with disk and rod impactors
October 28, 2007 Thirty-Fifth International Workshop
9
GESAC, Inc
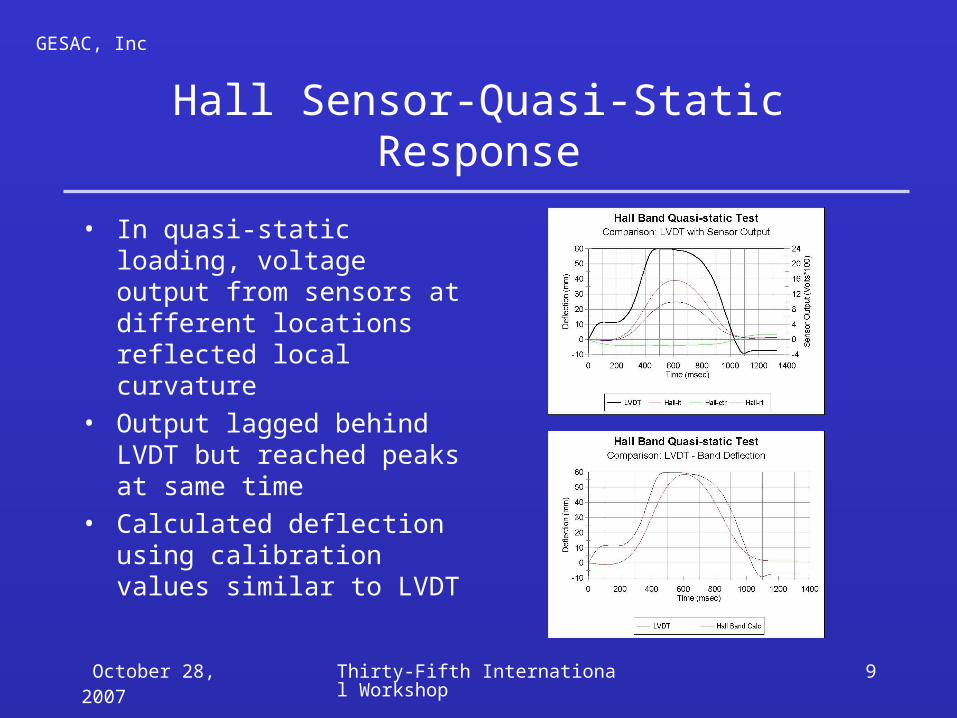
Hall Sensor-Quasi-Static Response
• In quasi-static loading, voltage output from sensors at different locations reflected local curvature
• Output lagged behind LVDT but reached peaks at same time
• Calculated deflection using calibration values similar to LVDT
October 28, 2007 Thirty-Fifth International Workshop
10
GESAC, Inc
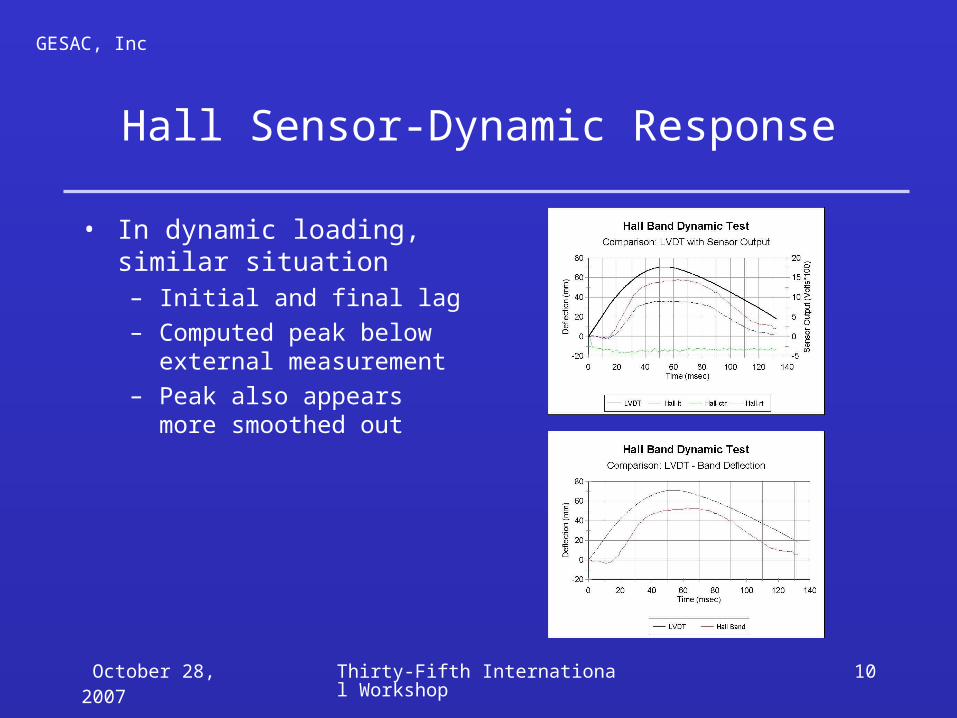
Hall Sensor-Dynamic Response
• In dynamic loading, similar situation– Initial and final lag
– Computed peak below external measurement
– Peak also appears more smoothed out
October 28, 2007 Thirty-Fifth International Workshop
11
GESAC, Inc
Hall Sensor-Limitations
• Problems– Proper sizing and mounting of hinges
• Found adhesive that would work with PVC material and Urethane strip
– Mounting of strip• Strip had lag in following foam deformation• Tends to move away from foam after impact• Flexibility of strip requires additional tension-interferes with foam
stiffness
October 28, 2007 Thirty-Fifth International Workshop
12
GESAC, Inc
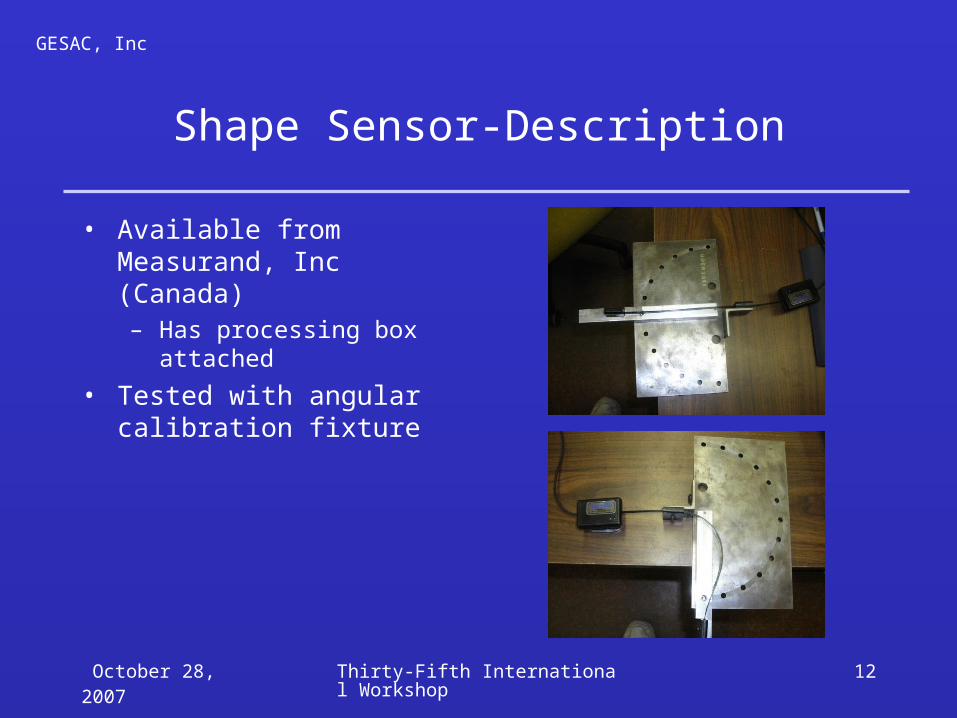
Shape Sensor-Description
• Available from Measurand, Inc (Canada)– Has processing box
attached
• Tested with angular calibration fixture
October 28, 2007 Thirty-Fifth International Workshop
13
GESAC, Inc
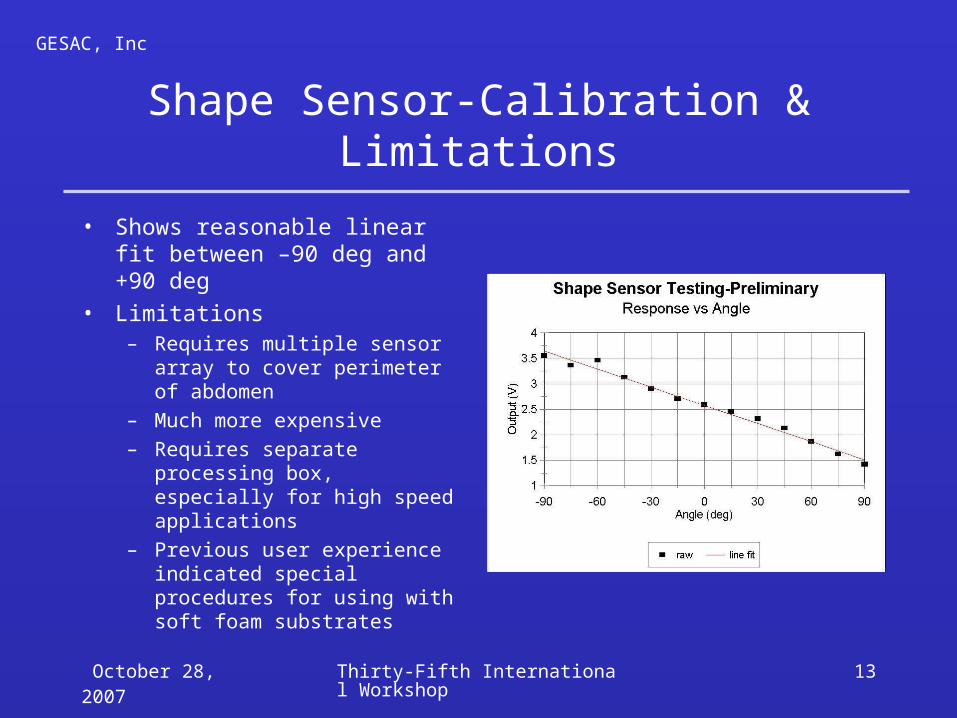
Shape Sensor-Calibration & Limitations
• Shows reasonable linear fit between –90 deg and +90 deg
• Limitations– Requires multiple sensor array
to cover perimeter of abdomen– Much more expensive– Requires separate processing
box, especially for high speed applications
– Previous user experience indicated special procedures for using with soft foam substrates
October 28, 2007 Thirty-Fifth International Workshop
14
GESAC, Inc
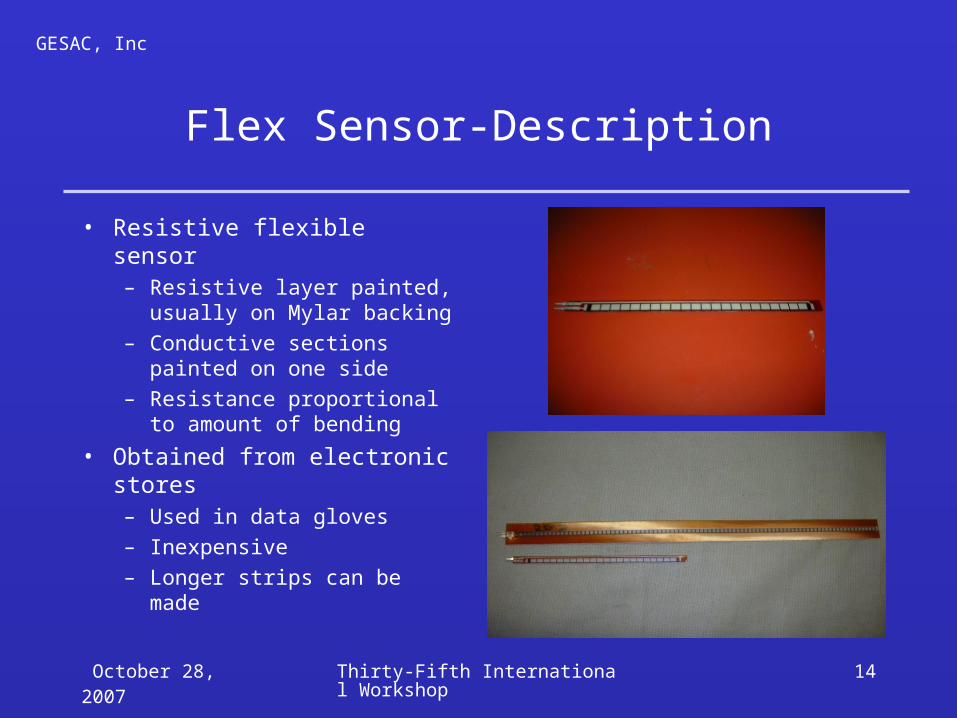
Flex Sensor-Description
• Resistive flexible sensor– Resistive layer painted,
usually on Mylar backing
– Conductive sections painted on one side
– Resistance proportional to amount of bending
• Obtained from electronic stores– Used in data gloves
– Inexpensive
– Longer strips can be made
October 28, 2007 Thirty-Fifth International Workshop
15
GESAC, Inc
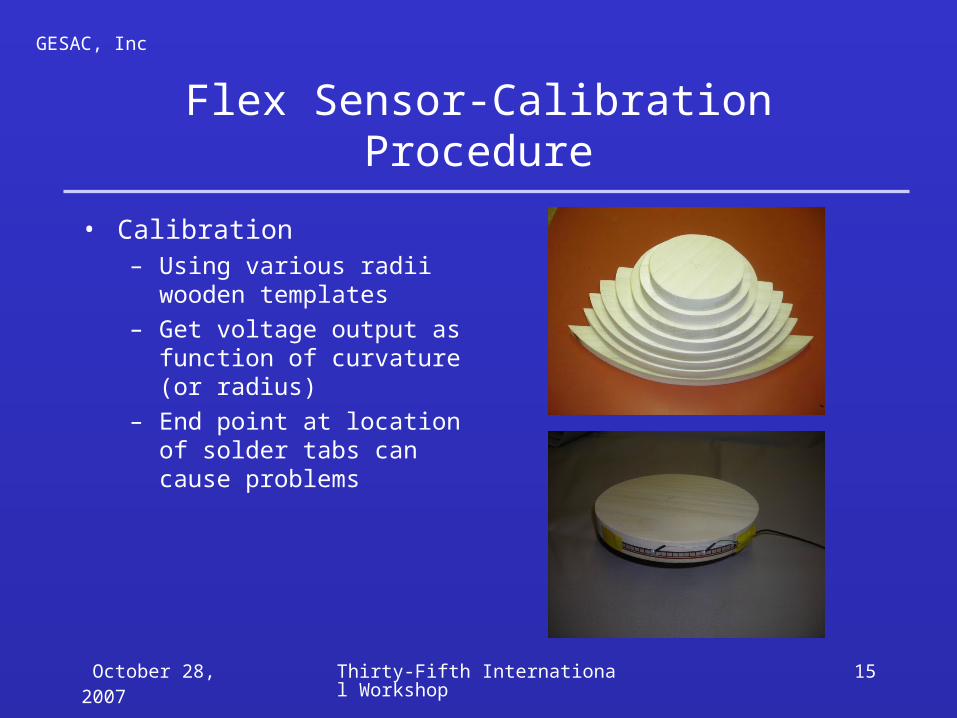
Flex Sensor-Calibration Procedure
• Calibration– Using various radii wooden
templates
– Get voltage output as function of curvature (or radius)
– End point at location of solder tabs can cause problems
October 28, 2007 Thirty-Fifth International Workshop
16
GESAC, Inc
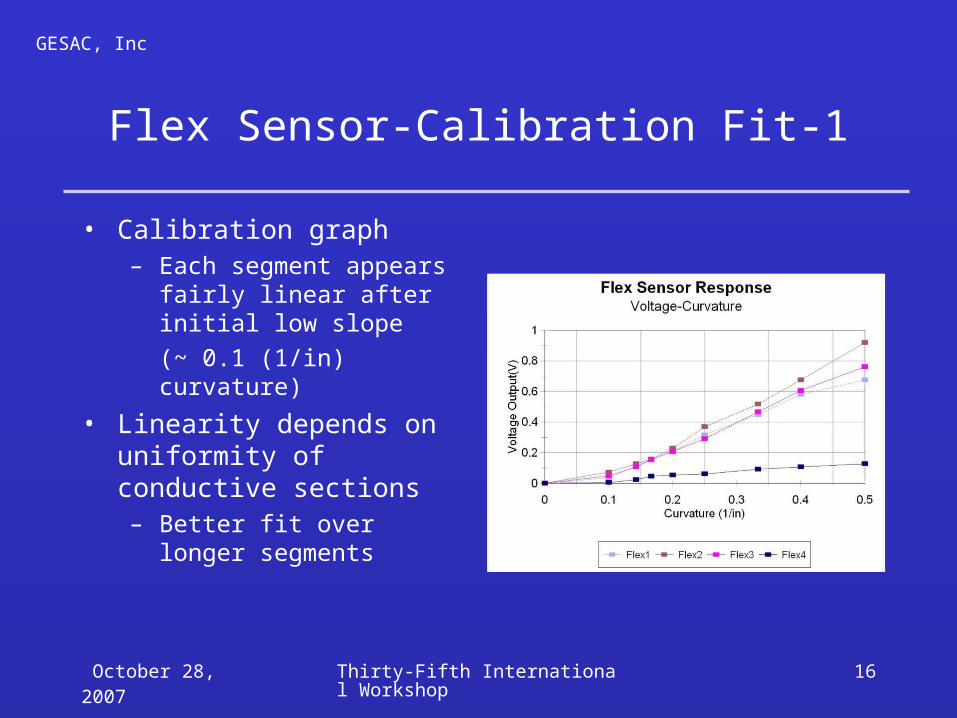
Flex Sensor-Calibration Fit-1
• Calibration graph– Each segment appears
fairly linear after initial low slope
(~ 0.1 (1/in) curvature)
• Linearity depends on uniformity of conductive sections– Better fit over longer
segments
October 28, 2007 Thirty-Fifth International Workshop
17
GESAC, Inc
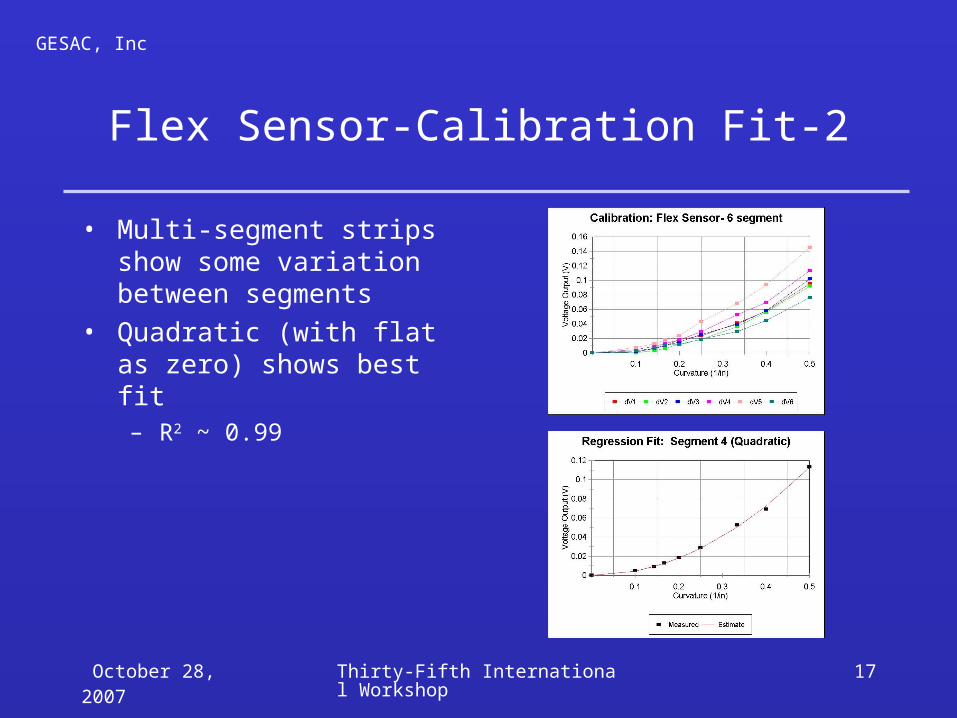
Flex Sensor-Calibration Fit-2
• Multi-segment strips show some variation between segments
• Quadratic (with flat as zero) shows best fit– R2 ~ 0.99
October 28, 2007 Thirty-Fifth International Workshop
18
GESAC, Inc
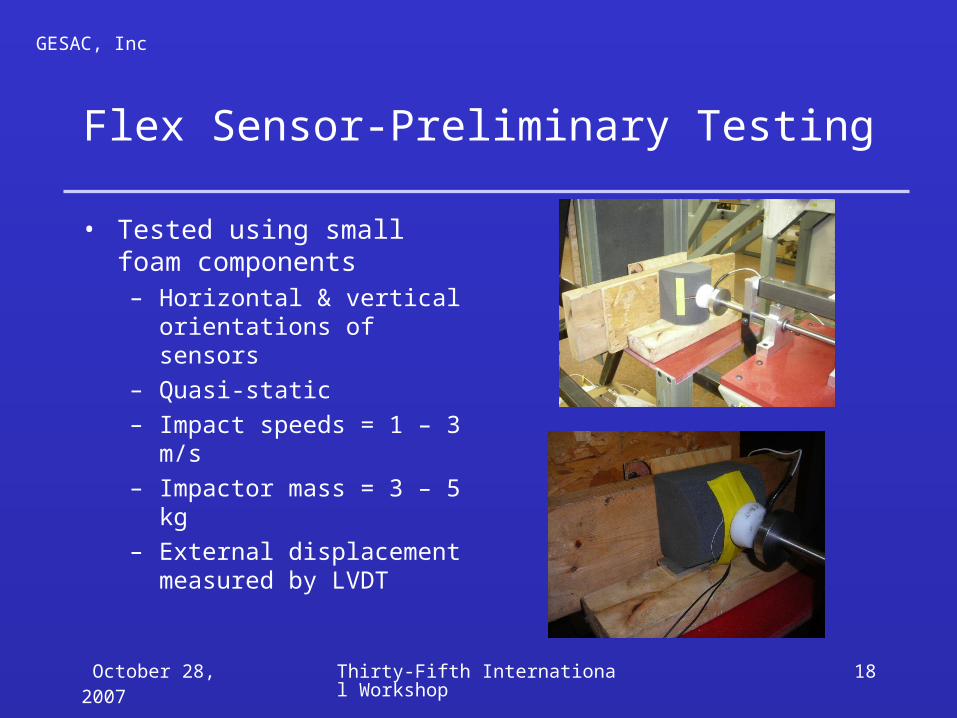
Flex Sensor-Preliminary Testing
• Tested using small foam components– Horizontal & vertical
orientations of sensors
– Quasi-static
– Impact speeds = 1 – 3 m/s
– Impactor mass = 3 – 5 kg
– External displacement measured by LVDT
October 28, 2007 Thirty-Fifth International Workshop
19
GESAC, Inc
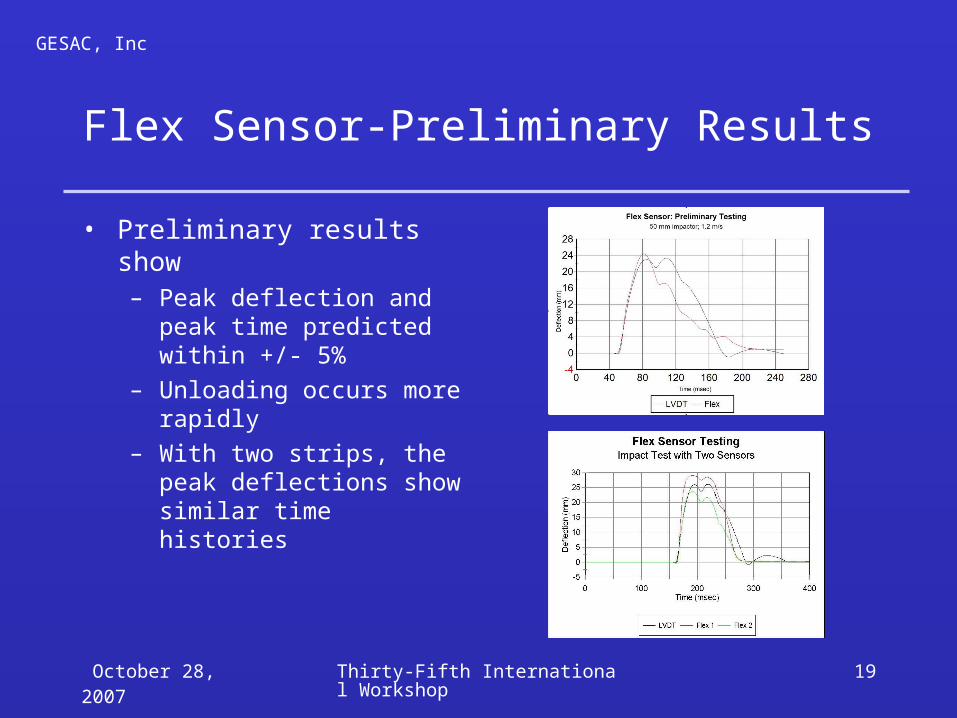
Flex Sensor-Preliminary Results
• Preliminary results show– Peak deflection and peak
time predicted within +/- 5%
– Unloading occurs more rapidly
– With two strips, the peak deflections show similar time histories
October 28, 2007 Thirty-Fifth International Workshop
20
GESAC, Inc
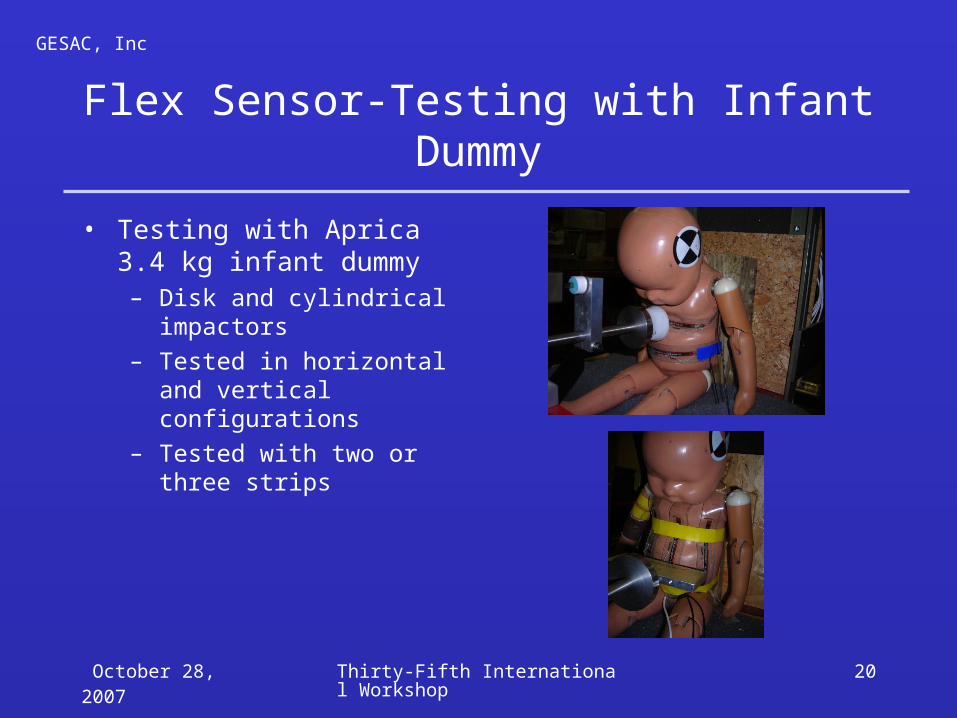
Flex Sensor-Testing with Infant Dummy
• Testing with Aprica 3.4 kg infant dummy– Disk and cylindrical
impactors
– Tested in horizontal and vertical configurations
– Tested with two or three strips
October 28, 2007 Thirty-Fifth International Workshop
21
GESAC, Inc
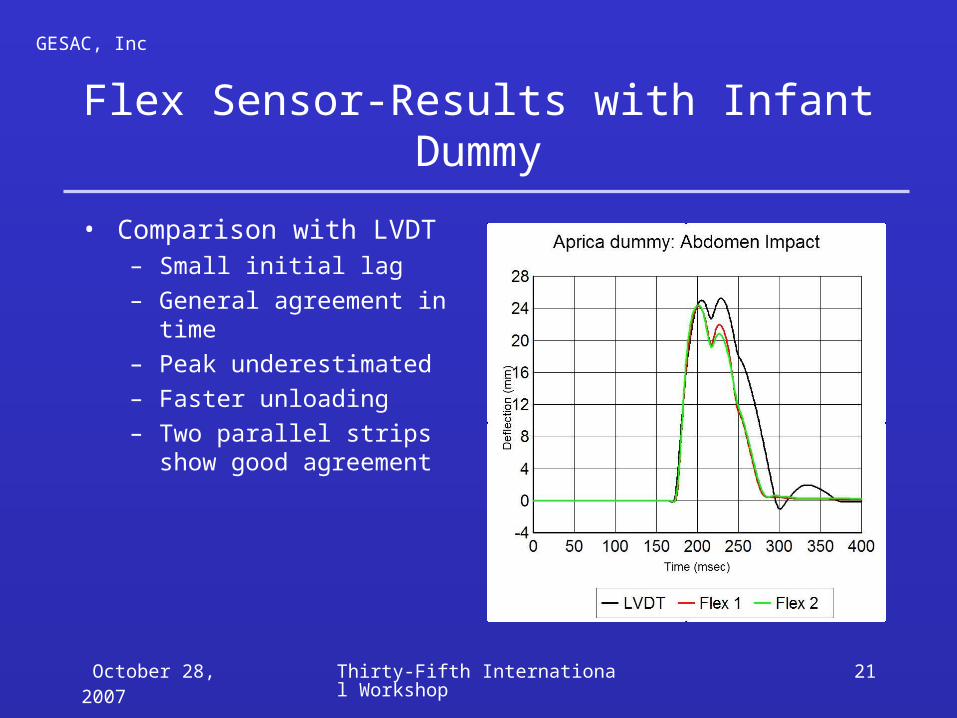
Flex Sensor-Results with Infant Dummy
• Comparison with LVDT– Small initial lag
– General agreement in time
– Peak underestimated
– Faster unloading
– Two parallel strips show good agreement
October 28, 2007 Thirty-Fifth International Workshop
22
GESAC, Inc
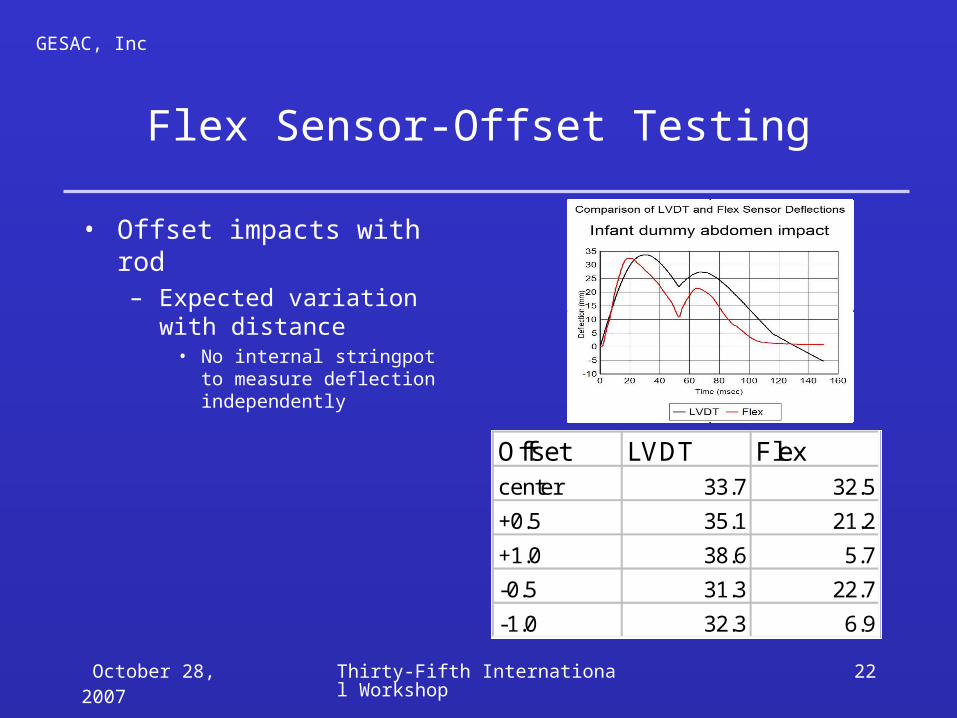
Flex Sensor-Offset Testing
• Offset impacts with rod– Expected variation with
distance• No internal stringpot to
measure deflection independently
Offset LVDT Flexcenter 33.7 32.5
+0.5 35.1 21.2
+1.0 38.6 5.7
-0.5 31.3 22.7
-1.0 32.3 6.9
October 28, 2007 Thirty-Fifth International Workshop
23
GESAC, Inc
Discussion-1
• Both Hall sensors and Flex sensors show promise as possible instruments for measuring dynamic compression– end conditions need to be addressed
• Hall sensors– with proper mounting, show good calibration fit (cubic fit) and
repeatability (R2 > 0.9999)– problem with maintaining contact with abdomen surface– still need proper procedure for stringing array of sensors into
linear strip
October 28, 2007 Thirty-Fifth International Workshop
24
GESAC, Inc
Discussion-2
• Flex sensors– can be obtained as strip- eliminating difficulties in
construction– calibration fit not as precise as Hall (quadratic fit) - R2 ~ 0.99– good repeatability – problems in securely attaching additional wire contacts
along length– ends tend to rebound faster, making unloading appear faster– smaller strips ( 4.5 in – 9 in) are appropriate size for child
abdomens• can be mounted in horizontal and vertical arrangements
October 28, 2007 Thirty-Fifth International Workshop
25
GESAC, Inc
Current Work
• Selecting optimum length and number of segments for use in different abdomen sizes including infant dummy
• Verifying measurements under oblique and offset impacts
• Improving computation procedure with variable end conditions
October 28, 2007 Thirty-Fifth International Workshop
26
GESAC, Inc
Acknowledgment
We would like to thank
Toyota Motor Corporation, Japan for funding this work