Embed Size (px)
Citation preview

J. Math. Biol.DOI 10.1007/s00285-007-0092-8 Mathematical Biology
Global dynamics of microbial competition for tworesources with internal storage
Bingtuan Li · Hal L. Smith
Received: 30 October 2006 / Revised: 15 March 2007© Springer-Verlag 2007
Abstract We study a chemostat model that describes competition between twospecies for two essential resources based on storage. The model incorporates internalresource storage variables that serve the direct connection between species growthand external resource availability. Mathematical analysis for the global dynamics ofthe model is carried out by using the monotone dynamical system theory. It is shownthat the limiting system of the model basically exhibits the familiar Lotka-Volterraalternatives: competitive exclusion, coexistence, and bi-stability, and most of theseresults can be carried over to the original model.
Keywords Chemostat · Essential resources · Resource storage · Competition ·Competitive exclusion · Coexistence · Bi-stability
Mathematics Subject Classification (2000) 92A15
1 Introduction
The classical Monod model of microbial growth on a single limiting resource hasinspired a wealth of experimental and theoretical studies [18]. Extending the modelto treat growth on multiple resources required consideration of how the different
B. Li’s research was partially supported by NSF grants DMS 0211614 and DMS 0616445. H. L. Smith’sresearch was supported in part by NSF grant DMS 0414270.
B. Li (B)Department of Mathematics, University of Louisville, Louisville, KY 40292, USAe-mail: [email protected]
H. L. SmithDepartment of Mathematics and Statistics, Arizona State University, Tempe, AZ 85287, USA
123

B. Li, H. L. Smith
resources interact or complement each other [18,20,32,33]. In the case of two essen-tial resources, such as nitrogen and phosphorus in the case of phytoplankton, growthstops when either resource falls below a certain level. This so-called Liebig’s law ofthe minimum is generally accepted. Models of growth and competition for multipleessential resources also require consideration of how much of each resource contrib-utes to the makeup of the organism. This is the question of yield or stoichiometry. Earlymodels [20] included fixed yield constants which imply that resource uptake exactlymatches the organisms stoichiometry. These models gave rise to a powerful graph-ical theory [11,32,33] of resource competition which has mathematically rigorousunderpinnings [16,21].
However, experiments showed [2,7] that phytoplankton stoichiometry is variableand this lead Caperon [2] and Droop [6–8] to suggest decoupling the growth rate andthe resource uptake rate which are held in strict proportionality in the classical Monodtheory [6–8]. The model was modified by introducing an internal store, or quota, ofnutrient with growth depending on the quantity of internal store alone. Uptake, con-verting external resource to internal store, was typically modeled by using Monod’sformalism. Droop’s model, has been thoroughly studied [3,4,10–12,23,26,27] in thecase of a single resource but only recently has it been extended to include multipleresources [19]. Legovic and Cruzado [19] introduced and partially analyzed a model ofsingle population growth on multiple resources. This work was extended by de Leenh-eer et al. [5] who gave a global analysis of the two-resource growth model. Furtherimplications of the model were explored by Klausmeier et al. [17]. Here, we extendthis work by giving a global analysis of a Droop model of two microbial populationscompeting for two resources.
We should remark that state of the art models of microbial growth are continuing toevolve, taking more into account various internal enzymes, transport molecules, andprecursor molecules. See Koch [18] and Narang and Pilyugin [24] for these.
Essentially, we will show that the familiar alternative dynamics of the classicalLotka-Volterra competition model, namely, competitive exclusion, coexistence, andbi-stability, hold for our system. Our results are parallel to those established by Hsuet al. [16] for the simpler model without internal stores and with fixed stoichiometry.In line with the Competitive Exclusion Principle, two populations competing for tworesources are expected to show all the Lotka-Volterra alternatives whereas two popu-lations competing for a single resource, as shown in earlier work [26,27], genericallyleads to competitive exclusion.
A fairly complete global analysis of this system of eight ordinary differential equa-tions (two populations, two resources and corresponding internal stores for each pop-ulation) is possible because of two features of the chemostat model: (1) conservationof each resource in its various forms allows the elimination of the two resource equa-tions, and (2) the resulting system of six equations can, after change of variable, beviewed as a monotone dynamical system [5,26]. There is a well-developed theory ofcompetition in an abstract setting [15,25]. For technical reasons related to the geome-try of the domain of our system, the theory does not apply to our model, but the prooftechniques developed in [15,25] might work to yield our results. In this paper, we shalltake a approach that is more straightforward than what is taken in [15,25] to study theglobal stability of the model.
123

A competition model based on storage
2 The model and overview of main results
The model of two species competing for two essential limiting resources in a che-mostat environment, in which growth is assumed to depend on the amount of eachresource stored internally by the microbe, takes the form
R′ = D(R0 − R) − x1ρR1(R, Q R1) − x2ρR2(R, Q R2)
S′ = D(S0 − S) − x1ρS1(S, QS1) − x2ρS2(S, QS2)
Q′R1 = ρR1(R, Q R1) − min(µR1(Q R1), µS1(QS1))Q R1
Q′S1 = ρS1(S, QS1) − min(µR1(Q R1), µS1(QS1))QS1
x ′1 = [min(µR1(Q R1), µS1(QS1)) − D]x1
Q′R2 = ρR2(R, Q R2) − min(µR2(Q R2), µS2(QS2))Q R2
Q′S2 = ρS2(S, QS2) − min(µR2(Q R2), µS2(QS2))QS2 (2.1)
x ′2 = [min(µR2(Q R2), µS2(QS2)) − D]x2
R(0) ≥ 0, S(0) ≥ 0, xi (0) ≥ 0, Q Ri (0) ≥ PRi , QSi (0) ≥ PSi , i = 1, 2.
Here R(t) and S(t) denote the concentrations of the external limiting resourcesin the chemostat at time t . xi (t) denotes the concentration of species i at time t .Q Ri (t) represents the amount of stored resource R per individual of species i at timet . QSi (t) represents the amount of stored resource S per individual of species i at timet . µRi (Q Ri ) and µSi (QSi ) are the growth rates of species i as a function of internalresource Q Ri and QSi , respectively. ρRi (R, Q Ri ) is the per capita uptake rate of spe-cies i as a function of resource concentration R and internal resource Q Ri . ρSi (S, QSi )
is the per capita uptake rate of species i as a function of resource concentration S andinternal resource QSi . D is the dilution rate of the chemostat. PRi and PSi denotethreshold stored resource concentrations below which no growth of species i occurs.In the model (2.1) Liebig’s minimal law is used to describe the dependence of speciesgrowth on internal resources.
In summary, the specific growth rate of each organism depends on the amount ofeach resource that is stored internally; its value is the smaller of µR(Q R) and µS(QS)
reflecting that the two resources are complementary, not substitutable. An organism’suptake of external resource depends on the concentration of that resource in the exter-nal environment and, possibly, on the amount of that resource already stored. Thedynamics of the internal store of each resource is a balance between uptake of externalresource and dilution of internal store by growth. Each resource is supplied to the che-mostat at constant concentration (R0 and S0) at constant in-flow rate. Organisms andun-used nutrient are removed from the chemostat at the same flow rate. The dilutionrate D is the ratio of this flow rate to chemostat volume. For more detailed descriptionof model (2.1) and related variables, see Andersen [1].
According to Droop [6–8], for N = R, S and i = 1, 2
µNi (QNi ) = µmax,Ni (1 − Qmin,Ni/QNi ),
123

B. Li, H. L. Smith
µNi (QNi ) = µmax,Ni(QNi − Qmin,Ni )+
KNi + (QNi − Qmin,Ni )+
where Qmin,Ni is the minimum cell quota necessary to allow cell division and (QNi −Qmin,Ni )+ is the positive part of (QNi − Qmin,Ni ), and µmax,Ni is the apparent max-imal growth rate of the species.
According to Grover [11], for N = R, S and i = 1, 2
ρNi (N , QNi ) = ρNi,max(QNi )N
KNi + N
ρNi,max(QNi ) = ρhighNi,max − (ρ
highNi,max − ρlow
Ni,max)QNi − QNi,min
QNi,max − QNi,min
where QNi,min ≤ QNi ≤ QNi,max. Cunningham and Nisbet [3,4] took ρNi,max to beconstant.
Motivated by these examples, we assume that for each N = R, S and i = 1, 2µNi is defined and continuously differentiable for QNi ≥ PNi , where PNi > 0, andsatisfies:
µNi (QNi )≥0, µ′Ni (QNi )>0 and continuous for QNi ≥ PNi , µNi (PNi )=0.
(2.2)
We assume that ρNi is continuously differentiable in (N , QNi ) for N ≥ 0 and QNi ≥PNi and satisfies
ρNi (0, QNi ) = 0,∂ρNi
∂ N> 0,
∂ρNi
∂ QNi≤ 0. (2.3)
It is easy to see that every component of the solution is positive for t > 0. Thefollowing conservation principle is useful for showing the boundedness of solutionsof (2.1) and for reducing the dimension of the system.
Let
TR = R + x1 Q R1 + x2 Q R2, TS = S + x1 QS1 + x2 QS2.
Then T ′R = D(R0 − TR) and T ′
S = D(S0 − TS). We have limt→∞ TR(t) = R0 andlimt→∞ TS(t) = S0, i.e.,
limt→∞[R(t) + x1(t)Q R1(t) + x2(t)Q R2(t)] = R0,
(2.4)lim
t→∞[S(t) + x1(t)QS1(t) + x2(t)QS2(t)] = S0.
123

A competition model based on storage
From (2.4), we obtain the following limiting system of (2.1)
Q′R1 = ρR1(R0 − x1 Q R1 − x2 Q R2, Q R1) − min(µR1(Q R1), µS1(QS1))Q R1
Q′S1 = ρS1(S0 − x1 QS1 − x2 QS2, QS1) − min(µR1(Q R1), µS1(QS1))QS1
x ′1 = [min(µR1(Q R1), µS1(QS1)) − D]x1
Q′R2 = ρR2(R0 − x1 Q R1 − x2 Q R2, Q R2) − min(µR2(Q R2), µS2(QS2))Q R2
Q′S2 = ρS2(S0 − x1 QS1 − x2 QS2, QS2) − min(µR2(Q R2), µS2(QS2))QS2 (2.5)
x ′2 = [min(µR2(Q R2), µS2(QS2)) − D]x2
xi (0) ≥ 0, Q Ri (0) ≥ PRi , QSi (0) ≥ PSi , i = 1, 2.
An alternative assumption that leads to a reduction in dimension of the full system(2.1) deserves mention. It is often assumed that the time scale at which the cell quotachange is fast compared to the other time scales in the system [17]. In that case, aquasi-steady state treatment of the cell quota leads to the elimination of the variablesQ Ri , QSj , i, j = 1, 2.
Although the details are messy and the notation necessarily cumbersome, basicallywe are going to show that the dynamical behaviors exhibited by (2.5) are just those ofthe familiar Lotka-Volterra competition system. Namely, we will show that:
1. Aside from the trivial equilibrium E0 where both organisms are absent, there mayexist mono-culture equilibrium Ei where only population i is present, i = 1, 2.
2. Ei comes in one of two flavors depending on whether resource R or S is growth-limiting for population i . (R is growth-limiting for population i if µRi < µSi .) IfEi does not exist then population i goes extinct.
3. There may exist a coexistence equilibrium E12, but only when E1 and E2 exist andonly when they have the same stability property, i.e., both stable or both unstable.
4. Each population must be limited by a different resource at E12. Hence there aretwo alternatives: population one is R-limited while population two is S-limited orvice versa.
5. The familiar Lotka-Volterra alternatives hold:
• Competitive exclusion: if the Ei have opposite stability properties, then theasymptotically stable one attracts all solutions with xi (0) > 0, i = 1, 2.
• Coexistence: if both Ei are unstable, then E12 attracts all such solutions.• Bistability: if both Ei are asymptotically stable, then E12 is a saddle point and
almost every solution converges to one of the Ei
We will be able to carry most of these results over to the original system (2.1) withthe notable exception of the bistable case, where for technical reasons, we are unableto establish that almost all solutions converge to one of the Ei .
123

B. Li, H. L. Smith
3 Converting (2.5) to a monotone system
Let URi = xi Q Ri , USi = xi QSi , i = 1, 2. Then
U ′R1 = ρR1(R0 − UR1 − UR2, UR1/x1)x1 − DUR1
U ′S1 = ρS1(S0 − US1 − US2, US1/x1)x1 − DUS1
x ′1 = [min(µR1(UR1/x1), µS1(US1/x1)) − D]x1
U ′R2 = ρR2(R0 − UR1 − UR2, UR2/x2)x2 − DUR2 (3.1)
U ′S2 = ρS2(S0 − US1 − US2, US2/x2)x2 − DUS2
x ′2 = [min(µR2(UR2/x2), µS2(US2/x2) − D]x2
xi (0) ≥ 0, URi (0) ≥ 0, USi (0) ≥ 0, i = 1, 2.
We use the notation z = (UR1, US1, x1, UR2, US2, x2) for a state vector. The bio-logically relevant domain for z is the bounded convex domain
�={z ∈ R6+ :UN1+UN2 ≤ N 0,PNi xi ≤UNi , xi =0⇒UNi =0, N = R, S, i =1, 2}.(3.2)
These restrictions on z reflect that QNi = UNi/xi ≥ PNi and that UNi should vanishwith xi . It is easy to see that � is positively invariant for (3.1) but, unfortunately, �
is not closed. We show below that forward orbits starting in � have compact closurein �.
We briefly return to system (2.5) in order to establish an important bound that willhave useful implications for (3.1).
Lemma 1 There exist positive constants cRi , CRi , cSi , CSi such that for every solution(Q R1(t), QS1(t), x1(t), Q R2(t), QS2(t), x2(t)) of (2.5)
cNi < QNi (t) < CNi , i = 1, 2, N = R, S
for all large t. If UNi (t) → UNi (∞) as t → ∞ for N = R, S and i = 1, 2, thenQNi (t) → QNi (∞) as t → ∞ for N = R, S and i = 1, 2 where QNi (∞) satisfy
ρNi (N 0 − UN1(∞) − UN2(∞), QNi (∞))
− min(µRi (Q Ri (∞)), µSi (QSi (∞)))QNi (∞) = 0.
Proof The proof of this lemma is similar to that of Lemma 2 of Smith and Walt-man [26]. However, the upper bounds CNi are not so simple so we give a sketch of theargument. The upper bounds may be obtained using persistence theory by showingthat the system is p-persistent where p = min(µRi (Q Ri ), µSi (QSi )). By this we meanthe existence of ε > 0 such that lim inf t→∞ min(µRi (Q Ri (t)), µSi (QSi (t))) ≥ 2ε
for every solution. This implies that for all large t ,
Q′Ni ≤ ρNi (N 0, PNi ) − εQNi
As the right hand side is negative for large QNi , the desired conclusion follows. �123

A competition model based on storage
Lemma 1 shows that components R(t), S(t), Q Ri (t), QSi (t), URi (t), USi (t), andxi (t) of (2.1), (2.5), (3.1) are all bounded.
Corollary 1 Forward orbits of (3.1) have compact closure in �.
Proof It suffices to show that no omega limit points z satisfy xi = 0 and UNi > 0 forsome i, N . But this follows from Lemma 1. �Lemma 2 System (3.1) generates a monotone dynamical system in � relative to theorder relation
(UR1, US1, x1, UR2, US2, x2) ≤K (UR1, US1, x1, UR2, US2, x2)
defined by
UN1 ≤ UN1, x1 ≤ x1, UN2 ≥ UN2, x2 ≥ x2, N = R, S.
It is strongly monotone on the subdomain where xi > 0, i = 1, 2.
Proof One can verify the generalized Kamke condition in [29], as in the proof ofLemma 2.6 of [21], which does not require differentiability of the vector field, but itis simpler to note that as � is convex and hence p-convex (see [28]), we may focuson the Jacobian of the vector field at points z ∈ � where it exists (µRi = µSi ) andwhere xi > 0. Its sign structure is as follows
J =
⎡⎢⎢⎢⎢⎢⎢⎣
· 0 + − 0 00 · + 0 − 0
+/0 +/0 · 0 0 0− 0 0 · 0 +0 − 0 0 · +0 0 0 +/0 +/0 ·
⎤⎥⎥⎥⎥⎥⎥⎦
where +/0 means the term is either positive or zero. Precisely one of these terms ispositive in the third and sixth row. Obviously, J has the block structure characteristicof type K monotone systems [28], consisting of diagonal 3 × 3 blocks with non-neg-ative off-diagonal entries and off-diagonal 3 × 3 non-positive blocks. Furthermore, Jis irreducible and therefore the system is strongly monotone. �
This order preservation property in � will be used to study the global asymptoticbehavior of solutions of the system (3.1) and, consequently of (2.5).
4 The single-population growth model
This section amounts to a digression from our main aim which is to consider compe-tition between two populations. De Leenheer et al. [5] gave a global analysis of thesingle population growth model for the special case that ρN depends only on N andnot on QN for N = R, S by using the monotone dynamical theory. They showed thateither the organism is eliminated from the chemostat or it achieves a positive steady
123

B. Li, H. L. Smith
state, depending on resource conditions. In this section, we prove a more general resultby using a simplier method. A reader primarily interested in the case of competitionmay skim quickly over the notation leading up to our main result, Theorem 1, sincethe notation will be used later. Theorem 1 will also play a role later on when we wishto establish extinction results for the two-species model.
In this section, we study the chemostat model that describes the growth of a singlespecies on two essential resources based on storage:
R′ = D(R0 − R) − xρR(R, Q R)
S′ = D(S0 − S) − xρS(S, QS)
Q′R = ρR(R, Q R) − min(µR(Q R), µS(QS))Q R (4.1)
Q′S = ρS(S, QS) − min(µR(Q R), µS(QS))QS
x ′ = [min(µR(Q R), µS(QS)) − D]x .
Here we use x(t) to denote the density of the species, R(t) and S(t), and Q R(t) andQS(t) denote the densities of the external and internal resources respectively. µR andµS satisfy (2.2) and ρR and ρs satisfy (2.3) where the subscript index i has beendropped.
Since R(t) + x(t)Q R(t) → R0 and S(t) + x(t)QS(t) → S0 as t → ∞, we havethe following limiting system
Q′R = ρR(R0 − x Q R, Q R) − min(µR(Q R), µS(QS))Q R
Q′S = ρS(S0 − x QS, QS) − min(µR(Q R), µS(QS))QS (4.2)
x ′ = [min(µR(Q R), µS(QS)) − D]x .
For system (4.2), every solution is positive and there exist positive numbers CR, CS,
cR, cS such that for every solution (Q R(t), QS(t), x(t)) of (2.5)
cR < Q R(t) < CR, cS < QS(t) < CS (4.3)
for all large t .Let UR(t) = x(t)Q R(t) and US(t) = x(t)QS(t). Then
U ′R = ρR(R0 − UR, UR/x)x − DUR
U ′S = ρS(S0 − US, US/x)x − DUS (4.4)
x ′ = (min(µR(UR/x), µS(US/x)) − D)x .
We define extended real numbers σR, σS, λR, λS such that
µR(σR) = D, µS(σS) = D, ρR(λR, σR) = DσR, ρS(λS, σS) = DσS
(4.5)
123

A competition model based on storage
with the understanding that for N = R, S, σN = ∞ if D does not belong to the rangeof µN and λN = ∞ if either σN = ∞ or σN < ∞ but DσN does not belong to therange of ρN (•, σN ).
We shall assume that
λR = R0, λS = S0. (4.6)
To determine the equilibrium points of (4.2), we need solve
0 = ρR(R0 − x Q R, Q R) − min(µR(Q R), µS(QS))Q R
0 = ρS(S0 − x QS, QS) − min(µR(Q R), µS(QS))QS (4.7)
0 = (min(µR(Q R), µS(QS)) − D)x
for (Q R, QS, x).We will demand that the following hypothesis, denoted by (H), hold.
(H) µR(Q R) = µS(QS) at equilibrium
so the system is differentiable at the equilibrium. System (4.2) always has a washoutequilibrium
E0 = (Q0R, Q0
S, 0)
where Q0R and Q0
S satisfies
ρR(R0, Q0R) − min(µR(Q0
R), µS(Q0S))Q0
R = 0(4.8)
ρS(S0, Q0S) − min(µR(Q0
R), µS(Q0S))Q0
S = 0.
See Lemma 9 of the Appendix for a proof of existence and uniqueness of a solu-tion of (4.8). There it is shown that for an open and dense set of (R0, S0), we haveµR(Q0
R) = µS(Q0S) so that the system is differentiable at E0.
A straightforward calculation shows that the Jacobian matrix at E0 has two negativeeigenvalues and the third eigenvalue is given by min(µR(Q0
R), µS(Q0S)) − D. E0 is
asymptotically stable if and only if Q0R < σR or Q0
S < σS , which, in view of (4.8), isequivalent to R0 < λR or S0 < λS . If E0 is unstable, it is a saddle. In this case, thefirst quadrant of the Q R − QS plane is invariant, and it is the stable manifold of E0.
The second equilibrium corresponds to the presence of the population. If the popu-lation is limited by resource R at the equilibrium, then at the equilibrium µR(Q R) ≤µS(QS). Solving the third equation of (4.7) for Q R one obtains Q R = σR . Thefirst equation of (4.7) then becomes ρR(R0 − xσR, σR) − DσR = 0 which yields
R0 − xσR = λR . Thus x = R0−λRσR
> 0 if and only if λR < R0. Denoting the com-
ponent QS by Q RS at the equilibrium, we have that Q R
S is the unique positive solutionof
ρS(S0 − R0 − λR
σRQ R
S , Q RS ) − DQ R
S = 0. (4.9)
123

B. Li, H. L. Smith
At ER we must have µS(Q RS ) ≥ D, i.e, Q R
S ≥ σS . In view of (4.9), (4.5), and the
monotonicity properties of ρS , Q RS ≥ σS if and only if S0 − R0−λR
σRQ R
S ≥ λS which
is equivalent to 0 < R0−λRS0−λS
≤ σRQ R
S. Obviously then
0 <R0 − λR
S0 − λS≤ σR
σS.
Conversely, if this inequality holds then λS ≤ S0 − R0−λRσR
σS so by monotonicity ofρS and the definition of σS we have
ρS(S0 − R0 − λR
σRσS, σS) − DσS ≥ 0
and, again by monotonicity of ρS , (4.9) has a unique solution Q RS ≥ σS . Therefore,
we have that the equilibrium
ER = (σR, Q RS ,
R0 − λR
σR)
exists if and only if
λR < R0, λS < S0, andR0 − λR
S0 − λS≤ σR
σS. (4.10)
If the last inequality is strict, then (H) holds since then µS(Q RS ) > D.
Similarly, one can show that if the population is limited by S then the correspondingequilibrium is given by
ES = (QSR, σS,
S0 − λS
σS)
where QSR is the unique solution of ρR(R0 − S0−λS
σSQS
R, QSR) − DQS
R = 0. ES existsif and only if
λR < R0, λS < S0, andR0 − λR
S0 − λS≥ σR
σS. (4.11)
We remark that if strict inequality fails in the final inequality of (4.10) then ER = ES
and strict inequality also fails in the final inequality of (4.11). A symmetrical conclu-sion holds if strict inequality fails in the final inequality of (4.11). It follows that (H)holds if and only if
R0 − λR
S0 − λS= σR
σS(4.12)
123

A competition model based on storage
Standard local stability of equilibria shows that ER ( ES) is asymptotically stablewhen it exists.
Proposition 1 Extinction equilibrium E0 is asymptotically stable if and only if
R0 < λR or S0 < λS
If (4.12) holds and
λR < R0 and λS < S0
then a unique mono-culture equilibrium, ER or ES, exists and (H) holds.
We shall use cooperative system (4.4) to study the globally asymptotic behav-ior of solutions of system (4.2). An equilibrium of (4.2) corresponds to an equi-librium of (4.4). In particular, if (Q R, QS, x) is an equilibrium point of (4.2) then(x1 Q R, x1 Qs, x1) is an equilibrium of (4.4). An equilibrium of (4.4) is asymptoticallystable if the corresponding equilibrium of (4.2) is asymptotically stable.
In order to establish the global stability for (4.2), we need two lemmas. The firstone is due to Hirsh et al. [13].
Lemma 3 Let a be a finite number and f : [a,+∞) → (−∞,+∞) be a differen-tiable function. If lim inf t→∞ f (t) < lim supt→∞ f (t), then there exist sequences{tm} ↑ ∞ and {sm} ↑ ∞ such that
limm→∞ f (tm) = lim sup
t→∞f (t), f ′(tm) = 0,
limm→∞ f (sm) = lim inf
t→∞ f (t), f ′(sm) = 0.
The second lemma is due to Barbalat. For a proof, see Gopalsamy [9].
Lemma 4 Let a be a finite number and f : [a,+∞) → (−∞,+∞) be a differentia-ble function. If limt→∞ f (t) exists (finite) and f ′ is uniformly continuous on (a,+∞),then limt→∞ f ′(t) = 0.
In what follows we use x, x, UR, U R, US, U S to denote lim supt→∞ andlim inf t→∞ of x(t), UR(t), and US(t), respectively.
The following theorem describes the global behavior of solutions of system (4.2).
Theorem 1 If E0 is the only equilibrium for (4.2) then every solution satisfies
limt→∞(Q R(t), QS(t), x(t)) = E0.
If E0 and EN exist, N = R or N = S, then
limt→∞(Q R(t), QS(t), x(t)) = EN
when x(0) > 0.
123

B. Li, H. L. Smith
Proof We shall use (4.4) to study the globally asymptotical behavior of solutions of(4.2). We first note that if one variable of (4.4) has a limit as t → ∞ then so do theother two variables. In fact, if one variable of (4.4) has a limit 0 as t → ∞ , thenso do the other two variables because of (4.3). If one variable has a nonzero limit ast → ∞, one applies Lemmas 3 and 4 to the UR equation and the US equation of(4.4) to see that the limits of other two variables exist. Here we prove only the casethat UR(t) has a nonzero limit U∗
R as t → ∞, as the proofs for the other two casesare similar. In this case, one applies lemma 4 to the UR equation of (4.4) to obtainlimt→∞[ρR(R0 − UR(t), UR(t)/x(t))x(t) − DUR(t)] = 0. This implies that x = 0and each of x and x is the unique solution of the equation
ρR(R0 − U∗R, U∗
R/x) − DU∗R/x = 0.
Therefore x = x and x(t) has a limit as t → ∞. Similarly, one applies Lemmas 3 and4 to the US equation of (4.4) to show that US(t) has a limit as t → ∞.
We now show that in (4.4), limt→∞ x(t) exists. If the limit does not exist, i.e.,x = x , then UR = U R and US = U S . We derive a contradiction as follows.
Applying Lemma 3 to the x equation of (4.4), one obtains a sequence {tn} withtn → ∞ as n → ∞ such that x ′(tn) = 0 and limn→∞ x(tn) = x > 0. x ′(tn) = 0shows
UR(tn)/x(tn) ≥ σR, US(tn)/x(tn) ≥ σS . (4.13)
On the other hand, applying Lemma 3 to the UR equation of (4.4), one has that thereexists {rn} with rn → ∞ as n → ∞ such that U ′
R(rn) = 0 and limn→∞ UR(rn) =UR > 0. U ′
R(rn) = 0 shows
ρR(R0 − UR(rn), UR(rn)/x(rn)) − DUR(rn)/x(rn) = 0. (4.14)
Since x(tn) → x > 0 and UR(rn) → UR > 0, for any ε > 0, UR(rn)/x(rn) ≥UR(tn)/x(tn)−ε ≥ σR −ε for large n. In view of (4.13) and (4.14), we have ρR(R0 −UR, σR − ε) ≥ D(σR − ε). Since ε is arbitrary, we have
ρR(R0 − UR, σR) ≥ DσR .
We therefore have
UR ≤ R0 − λR . (4.15)
Similarly, one can show that US ≤ S0 − λS .We now find a lower bound for U R . We first consider the case x > 0. Applying
Lemma 3 to the x equation of (4.4), one obtains a sequence {wn} with wn → ∞ asn → ∞ such that x ′(wn) = 0 and limn→∞ x(wn) = x > 0. x ′(wn) = 0 implies
UR(wn)/x(wn) = σR, or US(wn)/x(wn) = σS . (4.16)
123

A competition model based on storage
It follows that there exists a subsequence of {wn} still denoted by {wn} such thatUR(wn)/x(wn) = σR for all n or US(wn)/x(wn) = σS for all n. We shall onlyconsider the case
UR(wn)/x(wn) = σR for all n (4.17)
as the proof for the other case is similar. We apply Lemma 3 to the UR equation of(4.4) to obtain a sequence {�n} with �n → ∞ as n → ∞ such that U ′
R(�n) = 0 andlimn→∞ UR(�n) = U R > 0. U ′
R(�n) = 0 shows
ρR(R0 − UR(�n), UR(�n)/x(�n)) − DUR(�n)/x(�n) = 0. (4.18)
Since x(wn) → x > 0 and UR(�n) → U R > 0, for any ε > 0, UR(�n)/x(�n) ≤UR(wn)/x(wn) + ε = σR + ε for large n. In view of (4.18), we have ρR(R0 − U R,
σR + ε) ≤ σR + ε. Since ε is arbitrary, we have
ρR(R0 − U R, σR) ≤ DσR .
We therefore have
U R ≥ R0 − λR . (4.19)
This contradicts (4.15)We finally consider the case x = 0. Note that in this case U R = 0 and U S = 0.
Using Lemma 3, one can find a sequence {sn} with sn → ∞ as n → ∞ such thatthe following conditions are satisfied: (i) x ′(sn) = 0 and x(sn) is a local minimumvalue; (ii) limn→∞ x(sn) = 0; (iii) x(sn+1) is the global minimum value on the inter-val [sn, sn+1]; (iv) there exist sequences {zn} and {z′
n} such that sn ≤ zn ≤ sn+1,sn ≤ z′
n ≤ sn+1, and UR(zn) and US(z′n) are the global minimum values on the inter-
val [sn, sn+1] with U ′R(zn) ≤ 0 and U ′
S(z′n) ≤ 0. Conditions (i) and (ii) are easily
satisfied since x = x = 0. Once sn is chosen, due to the fact that x(t) is positivefor t ≥ 0 and x = 0, one can choose sn+1 such that condition (iii) is satisfied. SinceUR = U R = 0 and US = U S = 0, there exist sequences {vn} and {v′
n} with vn → ∞,v′
n → ∞ as n → ∞ such that UR(vn) and US(v′n) are local minimum values. We
choose a subsequence of {sn} still denoted by {sn} such that at least one number in theset {vn} and at least one number in the set {v′
n} are contained in the interval [sn, sn+1].Choose zn and z′
n in [sn, sn+1] such that UR(zn) and US(z′n) are global minimum
values on the interval [sn, sn+1]. Then {zn} and {z′n} satisfy (iv).
Note that x ′(sn) = 0 implies UR(sn)x(sn)
= σR or US(sn)x(sn)
= σS . There exists a subse-
quence of {sn} still denoted by {sn} such that UR(sn)x(sn)
= σR for all n or US(sn)x(sn)
= σS forall n. We shall only consider the case
UR(sn)
x(sn)= σR for all n (4.20)
123

B. Li, H. L. Smith
as the proof of the other case is similar. On the other hand, U ′R(zn) ≤ 0 implies
ρR(S0 − UR(zn),UR(zn)
x(zn)) − D
UR(zn)
x(zn)≤ 0. (4.21)
Because of (iii) and (iv), we have
UR(zn)
x(zn)≤ UR(sn+1)
x(sn+1). (4.22)
It follows from (4.20), (4.21) and (4.22) that
ρR(S0 − UR(zn), σR) ≤ DσR . (4.23)
This shows that
S0 − UR(zn) ≤ λR .
Letting n → ∞, we have (4.19) that leads to a contradiction as shown above. Wehave shown that limt→∞ x(t) exists and thus every solution of (4.4) approaches anequilibrium. Consequently every solution of (4.2) approaches an equilibrium.
If E0 is the only equilibrium, every solution of (4.2) converges to E0. If E0 and oneof ER and ES exist, E0 is a saddle, the stable manifold of E0 is the first quadrant of theQ R–QS plane which is invariant, and ER or ES is asymptotically stable. In this case,any solution with x(0) > 0 must approach either ER or ES . The proof is complete.
�
5 Competition
In this section, we first study the global stability of the limiting system (2.5). Ourstrategy is to make use of the order preserving system (3.1).
5.1 Equilibria and their stability
We define extended real numbers σRi , σSi , λRi , λSi for i = 1, 2 such that
µRi (σRi )= D, µSi (σSi )= D, ρRi (λRi , σRi )= DσRi , ρSi (λSi , σSi )= DσSi .
We assume that for i = 1, 2
λRi = R0, λSi = S0, λR1 = λR2, λS1 = λS2. (5.1)
In order that our system is linearizable at equilibria, we need
(H) µRi = µSi at equilibrium .
123

A competition model based on storage
The washout equilibrium
E0 = (Q0R1, Q0
S1, 0, Q0R2, Q0
S2, 0)
always exists. Here Q0Ri and Q0
Si satisfy
ρR1(R0, Q0R1) − min(µR1(Q0
R1), µS1(Q0S1))Q0
R1 = 0
ρS1(S0, Q0S1) − min(µR1(Q0
R1), µS1(Q0S1))Q0
S1 = 0
ρR2(R0, Q0R2) − min(µR2(Q0
R2)µS2(Q0S2))Q0
R2 = 0 (5.2)
ρS2(S0, Q0S2) − min(µR2(Q0
R2)µS2(Q0S2))Q0
S2 = 0.
See Lemma 9 of the Appendix.The Jacobian matrix at E0, denoted by JE0 , has four negative eigenvalues and two
additional eigenvalues given by min(µR1(Q0R1), µS1(Q0
S1))− D and min(µR2(Q0R2),
µS2(Q0S2)) − D. The standard analysis on the eigenvalues of JE0 is presented in the
Appendix. E0 is asymptotically stable if min(µR1(Q0R1), µS1(Q0
S1)) − D < 0 andmin(µR2(Q0
R2), µS2(Q0S2)) − D < 0. This shows Q0
Ri < σRi or Q0Si < σSi for
i = 1, 2. It follows from (5.2) that Q0Ri < σRi or Q0
Si < σSi for i = 1, 2 if and only ifR0 < λRi or S0 < λSi for i = 1, 2. Therefore E0 is asymptotically stable if and onlyif R0 < λRi or S0 < λSi for i = 1, 2.
Let ERi (ESi ) be the single-species equilibrium where only species i is involvedand the species is limited by resource R (S); for fixed i , at most one of these exists.At ER1, Q R1 = σR1, x1 > 0 and x2 = 0. We have
ER1 = (σR1, Q R1S1 , x R1
1 , Q R1R2, Q R1
S2 , 0).
where x R11 = R0−λR1
σR1, Q R1
S1 , Q R1R2, Q R1
S2 satisfy
ρR1(R0 − x R11 σR1, σR1) − DσR1 = 0
ρS1(S0 − x R11 Q R1
S1 , Q R1S1 ) − DQ R1
S1 = 0
ρR2(R0 − x R11 σR1, Q R1
R2) − min(µR2(Q R1R2), µS2(Q R1
S2 ))Q R1R2 = 0 (5.3)
ρS2(S0 − x R11 Q R1
S1 , Q R1S2 ) − min(µR2(Q R1
R2), µS2(Q R1S2 ))Q R1
S2 = 0.
The first three equations were dealt with in the previous section so we need only dwellon the quota for the missing population.
We therefore have that ER1 exists and (H) holds if and only if λR1 < R0, λS1 < S0,
and R0−λR1S0−λS1
< σR1σS1
.Similarly, the S-limited, population one equilibrium is
ES1 = (QS1R1, σS1, x S1
1 , QS1R2, QS1
S2, 0)
123

B. Li, H. L. Smith
where x S11 = S0−λS1
σS1, QS1
R1, QS1R2 and QS1
S2 satisfy
ρR1(R0 − x S11 QS1
R1, QS1R1) − DQS1
R1 = 0
ρR2(R0 − x S11 QS1
R1, QS1R2) − min(µR2(QS1
R2), µS2(QS1S2))QS1
R2 = 0
ρS2(λS1, QS1S2) − min(µR2(QS1
R2), µS2(QS1S2))QS1
S2 = 0.
ES1 exists if and only if λR1 < R0, λS1 < S0, and R0−λR1S0−λS1
> σR1σS1
.The equilibrium ER2 is given by
ER2 = (Q R2R2, Q R2
S1 , 0, σR2, Q R2S2 , x R2
2 )
where x R22 = R0−λR2
σR2, Q R2
S2 , Q R2R1 and Q R2
S1 satisfy
ρS2(S0 − x R22 Q R2
S2 , Q R2S2 ) − DQ R2
S2 = 0,
ρR1(λR2, Q R2R1) − min(µR1(Q R2
R1), µS1(Q R2S1 ))Q R2
R1 = 0, (5.4)
ρS1(S0 − x R22 Q R2
S2 , Q R2S1 ) − min(µR1(Q R2
R1), µS1(Q R2S1 ))Q R2
S1 = 0.
ER2 exists if and only if λR2 < R0, λS2 < S0, and R0−λR2S0−λS2
< σR2σS2
.The equilibrium ES2 is given by
ES2 = (QS2R1, QS2
S1, 0, QS2R2, σS2, x S2
2 )
where x S22 = S0−λS2
σS2, QS2
R2, QS2R1 and QS2
S1 satisfy
ρR2(R0 − x S22 QS2
R2, QS2R2) − DQS2
R2 = 0,
ρR1(R0 − x S22 QS2
R2, QS2R1) − min(µR1(QS2
R1), µS1(QS2S1))QS2
R1 = 0 (5.5)
ρS1(λS2, QS2S1) − min(µR1(QS2
R1), µS1(QS2S1))QS2
S1 = 0.
ES2 exists if and only if λR2 < R0, λS2 < S0, and R0−λR2S0−λS2
> σR2σS2
.We shall assume that for i, j = 1, 2 and i = j
R0 − λRi
S0 − λSj= σRi/Q Ri
Si , QSjR j/σSj . (5.6)
The Jacobian matrix at ER1, denoted by JER1 , has five negative eigenvalues oreigenvalue values with negative real parts, and an additional eigenvalue given bymin(µR2(Q R1
R2), µS2(Q R1S2 )) − D. The standard analysis on the eigenvalues of JER1
is presented in the Appendix. Note that min(µR2(Q R1R2), µS2(Q R1
S2 )) − D < 0 if andonly if Q R1
R2 < σR2 or Q R1S2 < σS2. The third equation of (5.3) shows that Q R1
R2 < σR2
is equivalent to λR1 < λR2, and the fourth equation of (5.3) shows that Q R1S2 < σS2 is
123

A competition model based on storage
Table 1 Summary of mono-culture equilibria and their stability
Equilibrium Existence criteria Stability criteria
E0 Always exists R0 < λRi or S0 < λSi , i = 1, 2
ER1 λR1 < R0, λS1 < S0, and R0−λR1S0−λS1
<σR1σS1
λR1 < λR2 or R0−λR1S0−λS2
>σR1Q R1
S1
ES1 λR1 < R0, λS1 < S0, and R0−λR1S0−λS1
>σR1σS1
λS1 < λS2 or R0−λR2S0−λS1
<QS1
R1σS1
ER2 λR2 < R0, λS2 < S0, and R0−λR2S0−λS2
<σR2σS2
λR2 < λR1 or R0−λR2S0−λS1
>σR2Q R2
S2
ES2 λR2 < R0, λS2 < S0, and R0−λR2S0−λS2
>σR2σS2
λS2 < λS1 or R0−λR1S0−λS2
<QS2
R2σS2
equivalent to S0 − x R11 Q R1
S1 < λS2, i.e., R0−λR1S0−λS2
> σR1Q R1
S1. Based on this and (5.6), we
have that ER1 is asymptotically if and only if λR1 < λR2 or R0−λR1S0−λS2
> σR1Q R1
S1.
Similarly, the Jacobian matrix at ES1 has six negative eigenvalues or eigenvalueswith negative real parts if and only if QS1
S2 < σS2 or QS1R2 < σR2 equivalent to
λS1 < λS2 or R0−λR2S0−λS1
<QS1
R1σS1
.The Jacobian matrix at ER2 has six negative eigenvalues or eigenvalues with neg-
ative real parts if and only if Q R2R1 < σR1 or Q R2
S1 < σS1 equivalent to λR2 < λR1 orR0−λR2S0−λS1
> σR2Q R2
S2.
The Jacobian matrix at ES2 has six negative eigenvalues or eigenvalues with neg-ative real parts if and only if and only if QS2
S1 < σS1 or QS2R1 < σR1 equivalent to
λS2 < λS1 or R0−λR1S0−λS2
<QS2
R2σS2
.Table 1 summarizes the criteria for the existence of the equilibria discussed above,
and the criteria for their stability. Here, we provide biological interpretations of some
inequalities involved in the table. R0−λRiS0−λSi
represents the ratio in which resources R andS are externally regenerated under equilibrium consumption pressure from species i inthe absence of its competitor. σRi/σSi represents the ratio in which R and S are inter-nally stored under equilibrium consumption pressure from species i in the absence of
its competitor. R0−λRiS0−λSi
< σRi/σSi implies that R is regenerating at an equilibrium rateslower than S with respect to the required consumption ratio of species i , and thus
species i is R-limited. Similarly R0−λRiS0−λSi
> σRi/σSi implies that species i is S-limited.R0−λRiS0−λSj
(i = j) represents the ratio of the equilibrium regeneration rate of R when
species i is alone to that of S when species j is alone.Sometimes we drop the resource label on the mono-culture equilibria and simply
write E1 for either ER1 or ES1 when no confusion will result.We now discuss the coexistence equilibrium. At a coexistence equilibrium, one
must have
min(µR1(Q R1), µS1(QS1)) − D = 0, min(µR2(Q R2), µS2(QS2)) − D = 0.
123

B. Li, H. L. Smith
If µR1(Q R1) − D = 0 and µR2(Q R2) − D = 0 at a coexistence equilibrium, thenQ R1 = σR1, Q R2 = σR2. It follows from the Q R1 equation and Q R2 equation of (2.5)that at the coexistence equilibrium λR1 = R0 − x1σR1 − x2σR2 = λR2, a contradic-tion. Similarly, it is impossible that µS1(QS1) − D = 0 and µS2(QS2) − D = 0 at acoexistence equilibrium. Therefore, at a coexistence equilibrium each population mustbe limited by a different nutrient. Either µR1(Q R1)− D = 0 and µS2(QS2)− D = 0,i.e., Q R1 = σR1 and QS2 = σS2, or µS1(QS1) − D = 0 and µR2(Q R2) − D = 0,i.e., QS1 = σS1 and Q R2 = σR2.
We first consider the case that population one is R-limited and population two isS-limited: Q R1 = σR1 and QS2 = σS2. In this case, we denote the correspondingcoexistence equilibrium by
E RS12 = (σR1, Q RS
S1 , x RS1 , Q RS
R2 , σS2, x RS2 )
In view of the system (2.5), we see that x RS1 and x RS
2 satisfy
R0 − x RS1 σR1 − x RS
2 Q RSR2 = λR1, S0 − x RS
1 Q RSS1 − x RS
2 σS2 = λS2, (5.7)
Q RSS1 satisfies
ρS1(λS2, Q RSS1 ) − DQ RS
S1 = 0, (5.8)
and Q RSR2 satisfies
ρR2(λR1, Q RSR2 ) − DQ RS
R2 = 0. (5.9)
Solving (5.7), we obtain
x RS1 = (R0 − λR1)σS2−(S0−λS2)Q RS
R2
σR1σS2−Q RSS1 Q RS
R2
, x RS2 = (S0−λS2)σR1−(R0−λR1)Q RS
S1
σR1σS2 − Q RSS1 Q RS
R2
.
(5.10)
Note that x RS1 > 0, x RS
2 > 0 is equivalent to
σR1
Q RSS1
>R0 − λR1
S0 − λS2>
Q RSR2
σS2or
σR1
Q RSS1
<R0 − λR1
S0 − λS2<
Q RSR2
σS2. (5.11)
Note that at E RS12 , we must have Q RS
S1 > σS1, Q RSR2 > σR2 so that µR1(σR1) <
µS1(Q RSS1 ) and µS2(σS2) < µR2(Q RS
R2 ). This is equivalent to λR1 > λR2 and λS1 <
λS2 due to (5.8) and (5.9). We therefore have that E RS12 exists if and only if λR1 > λR2,
λS1 < λS2, and (5.11) holds. In this case, the system is differentiable at E RS12 .
Similarly, in the case that population one is S-limited and population two is R-lim-ited, Q R2 = σR2 and QS1 = σS1, the corresponding coexistence equilibrium is given
123

A competition model based on storage
Table 2 Summary of existence of the coexistence equilibrium E12
Equilibrium Existence criteria
E RS12 λR1 > λR2, λS1 < λS2, σR1
Q RSS1
>R0−λR1S0−λS2
>Q RS
R2σS2
or σR1Q RS
S1<
R0−λR1S0−λS2
<Q RS
R2σS2
E S R12 λR1 < λR2, λS1 > λS2,
QS RR1
σS1>
R0−λR2S0−λS1
>σR2QS R
S2or
QS RR1
σS1<
R0−λR2S0−λS1
<σR2QS R
S2
by
E S R12 = (QS R
R1 , σS1, x S R1 , σR2, QS R
S2 , x S R2 )
where
x S R1 = (R0 − λR2)QS R
S2 − (S0 − λS1)σR2
QS RR1 QS R
S2 − σS1σR2,
(5.12)
x S R2 = (S0 − λS2)QS R
R1 − (R0 − λR2)σS1
QS RR1 QS R
S2 − σS1σR2,
QS RR1 satisfies
ρR1(λR2, QS RR1 ) − DQS R
R1 = 0, (5.13)
and QS RS2 satisfies
ρS2(λS1, QS RS2 ) − DQS R
S2 = 0. (5.14)
E S R12 exists if and only if QS R
R1 > σR1, QS RS2 > σS2, λR1 < λR2 and λS1 > λS2, and
QS RR1
σS1>
R0 − λR2
S0 − λS1>
σR2
QS RS2
or
QS RR1
σS1<
R0 − λR2
S0 − λS1<
σR2
QS RS2
.
We summarize these results in Table 2.The direct calculation for the stability of the E12 seems to be difficult as the Jacobian
matrix at the coexistence equilibrium has many nonzero entries. However, monotonesystems theory will allow us to finesse this issue. Here we point out a very simple factthat E12, once it exists, is always non-degenerate. For example, one can use a linear
123

B. Li, H. L. Smith
algebra software package to find that the determinant of the Jacobian matrix at E RS12
is given by
x RS1 x RS
2 µ′R1µ
′S2
∂ρR1
∂ R
∂ρS2
∂S(µR1 − ∂ρS1
∂ QS1)(µS2 − ∂ρR2
∂ Q R2)(σR1σS2 − QS R
S1 QS RR2 ).
(5.15)
Note the last factor is just the negative of the denominator in (5.12) and the productof other factors is positive. It follows that (5.15) is never zero.
The next result implies that coexistence is only possible when both mono-cultureequilibria exist.
Proposition 2 At most one coexistence equilibrium may exist. It may take one of twoforms: population one being R-limited while population two is S-limited, E RS
12 , orvice versa, E S R
12 . We sometimes drop the superscripts, writing E12 for the coexistenceequilibrium if it exists. E12 satisfies (H) if (5.1) holds, in which case, the Jacobian atE12 is nonsingular.
Lemma 5 If Ei does not exist for some i, then limt→∞ xi (t) = 0 for every solutionof (3.1).
Proof This follows directly from monotonicity considerations. Suppose that E1 doesnot exist and let (UR1, US1, x1, UR2, US2, x2) be the initial data of a solution z(t)of (3.1) and let w(t) be the solution with initial data (UR1, US1, x1, 0, 0, 0). As(UR1, US1, x1, UR2, US2, x2) ≤K (UR1, US1, x1, 0, 0, 0), then z(t) ≤K w(t), t ≥ 0.But w(t) converges to E0 by Theorem 1. By comparison, the first three componentsof z(t) must converge to zero. The proof for the case that E2 does not exist is similarand is omitted here. �Lemma 6 If both mono-culture equilibria E1 and E2 exist, one being asymptoticallystable and the other unstable in the linear approximation, then E12 cannot exist.
Proof We prove the Lemma only for the case that ER1 is asymptotically stable andER2 is unstable, and for the case that ER1 is asymptotically stable and ES2 is unstable,as the proofs for the other cases are similar.
If ER1 exists and ER2 is unstable, then in view of Table 1, λR2 > λR1, and
σR1
Q R1S1
>R0 − λR1
S0 − λS1,
R0 − λR2
S0 − λS1<
σR2
Q R2S2
. (5.16)
In this case, in review of Table 2, we see that it is impossible for E RS12 to exist. If E S R
12
exists, then either (i)QS R
R1σS1
> R0−λR2S0−λS1
> σR2QS R
S2or (ii)
QS RR1
σS1< R0−λR2
S0−λS1< σR2
QS RS2
holds. It
follows that from the second inequality in (5.16) and (i) that Q R2S2 < QS R
S2 . In viewof equations satisfied by Q R2
S2 and QS RS2 (see the first equation of (5.4) and equation
(5.14)), we have S0 − R0−λR2σR2
Q R2S2 < λS1 leading to R0−λR2
S0−λS1> σR2
Q R2S2
, which contradicts
the second inequality in (5.16). On the other hand, it follows from λR2 > λR1, the first
123

A competition model based on storage
inequality in (5.16), and (ii) that σR1Q R1
S1> R0−λR1
S0−λS1> R0−λR2
S0−λS1>
QS RR1
σS1, which contradicts
Q R1S1 > σS1, QS R
R1 > σR1. This shows that if ER1 exists and ER2 is unstable then E12does not exist.
We next consider the case that ER1 is asymptotically stable and ES2 is unstable.Since ES2 is unstable, λS1 < λS2 and
R0 − λR1
S0 − λS2>
QS2R2
σS2. (5.17)
In this case it is impossible for E S R12 to exist. On the other hand, the existence of E RS
12shows that λR1 > λR2, which together with the asymptotic stability of ER1 shows
R0 − λR1
S0 − λS2>
σR1
Q R1S1
. (5.18)
In view of Table 2, the existence of E RS12 leads to either (i) σR1
Q RSS1
> R0−λR1S0−λS2
>Q RS
R2σS2
or
(ii) σR1Q RS
S1< R0−λR1
S0−λS2<
Q RSR2
σS2. It follows from (5.18) and (i) that Q R1
S1 > Q RSS1 . By the
second equation of (5.3) and equation (5.8), we have that S0 − R0−λR1σR1
Q R1S1 > λS2.
This leads to R0−λR1S0−λS2
< σR1Q R1
S1contradicting (5.18). It follows from (5.17) and (ii)
that Q RSR2 > QS2
R2. By the first equation of (5.5) and equation (5.9), we have that
R0 − S0−λS2σS2
QS2R2 < λR1. This leads to R0−λR1
S0−λS2<
QS2R2
σS2contradicting (5.17). We have
shown that if ER1 is asymptotically stable and ES2 is unstable then neither E RS12 nor
E S R12 exists. The proof is complete. �In a subsequent section, we show that a coexistence equilibrium exists if Ei both
exist and are unstable in the linear approximation.
Proposition 3 If both E1 and E2 exist, the vector field (3.1) is continuously differen-tiable at each Ei , and if they are both asymptotically stable in the linear approximation,then E12 exists.
Proof We appeal to the proof of Theorem E.1 of [27], noting that the hypothesis therethat the vector field be continuously differentiable is not satisfied in our case. However,by our hypotheses, it is satisfied in a neighborhood of each Ei and the vector field isat least Lipschitz elsewhere in [E2, E1]K . This is sufficient for the existence of E12but not enough to ensure the stability assertion claimed in Theorem E.1 of [27]. �
5.2 Unstable manifolds of mono-culture equilibria.
We now discuss the eigenvector corresponding to the positive eigenvalue of eachmono-culture equilibrium when the equilibrium is unstable. Let X =< Q R1, QS1, x1,
RR2, QS2, x2 > be an eigenvector corresponding to the eigenvalue min(µR2(Q R1R2),
123

B. Li, H. L. Smith
µS2(Q R1S2 )) − D of JER1 when the eigenvalue is positive. The part of the unstable
manifold of ER1 is a one-dimensional curve that can be expressed near ER1, in termsof a parameter r as
X R1(r) = ER1 + r X + o(r)
as r → 0+, where o(r) represents a term satisfying o(r)/r → 0 as r → 0. In the newsystem (3.1), X R1(r) takes the form
YR1(r) = (x R11 σR1 + r(x1 Q R1
R1 + x R11 Q R1), x R1
1 Q R1S1 + r(x1 Q R1
S1 + x R11 QS1),
x R11 + r x1, r x2 Q R1
R2, r x2 Q R1S2 , r x2) + o(r).
Note that an equilibrium of (2.5) corresponds to an equilibrium of (3.1). In particular,if (Q R1, QS1, x1, Q R2, QS2, x2) is an equilibrium point of (2.5) then (x1 Q R1, x1 QS1,
x1, x2 Q R2, x2 QS2, x2) is an equilibrium of (3.1).We investigate the orbit of (2.5) through X R1(r), for small r > 0, by considering
the orbit of (3.1) through YR1(r). Let
F(YR1)(r) = (F1(YR1)(r), F2(YR1)(r), F3(YR1)(r), F4(YR1)(r),
F5(YR1)(r), F6(YR1)(r))
denote the right side of (3.1). Then straightforward calculation shows
F1(YR1)(r) = raR1 Q R1 + o(r)
F2(YR1)(r) = rbR1 Q R1 + o(r)
F3(YR1)(r) = rcR1 Q R1 + o(r)
F4(YR1)(r) = rdR1x2 + o(r) (5.19)
F5(YR1)(r) = reR1x2 + o(r)
F6(YR1)(r) = r fR1x2 + o(r)
where aR1, bR1, cR1, dR1, eR1, fR1 are positive numbers. The detailed calculation forthese formulas is presented in the Appendix. Since x2 = −αQ R1 with α > 0 (seethe Appendix), we choose Q R1 to be positive so that F(YR1(r)) <K 0 for sufficientlysmall r > 0. Similar results of estimates for unstable manifolds in the UR − US − xspace of other mono-culture equilibria can be obtained. We summarize these resultsin the following lemma.
Lemma 7 Assume that ENi is unstable for N = R or S, and its one-dimensionalunstable manifold is expressed near ENi in terms of a parameter r as YNi (r) forsmall r in the UR − US − x space. Then F(YN1)(r) <K 0 and 0 <K F(YN2)(r) forsmall r .
The following lemma shows that the omega limit set of a solution of (3.1) startingat a point on the unstable manifold YNi (r) where N = R or S for small r is an equi-librium point. This lemma is an immediate result of applying Lemma 7 and TheoremC.2 of Smith and Waltman [26].
123

A competition model based on storage
Lemma 8 Assume that ENi is unstable for N = R or S, and its one-dimensionalunstable manifold is expressed near ENi in terms of a parameter r as YNi (r) for smallr in the UR − US − x space. If a solution of (3.1) starts at a point on YNi (r) for smallr , then the solution approaches an equilibrium point monotonely as t → ∞.
5.3 Global stability of the limiting system
We now obtain further information about bounds of solutions of (3.1) and, conse-quently of (2.5). If (UR1(t), US1(t), x1(t), UR2(t), US2(t), x2(t)) is a solution of (3.1)in �, then
U ′Ri ≤ ρRi (R0 − URi , URi/xi )xi − DURi
U ′Si ≤ ρSi (S0 − USi , USi/xi )xi − DUSi (5.20)
x ′i = (min(µRi (URi/xi ), µSi (USi/xi )) − D)xi
for i = 1, 2. The solutions (URi , USi , xi ) can be compared to the solutions(URi , USi , xi ) of
U ′Ri = ρRi (R0 − URi , URi/xi )xi − DURi
U ′Si = ρSi (S0 − USi , USi/xi )xi − DUSi (5.21)
x ′i = (min(µRi (URi/xi ), µSi (USi/xi )) − D)xi
with (URi (0), USi (0), xi (0)) = (URi (0), USi (0), xi (0)). We have
URi (t) ≤ URi (t), USi (t) ≤ USi (t), xi (t) ≤ xi (t), for t ≥ 0. (5.22)
Lemma 5 shows that if λRi > R0 or λSi > S0 then limt→∞ xi (t) = 0. In whatfollows we shall always assume that λRi < R0 and λSi < S0 for i = 1, 2.
We will use the monotone dynamical system theory to study the global stabilityof (3.1). It will be convenient to let [X1, X2]K denote the order interval defined by{X |X1 ≤K X ≤K X2}.Theorem 2 Assume that Ei is asymptotically stable, and E j (i = j ) is unstable in thelinear approximation. Then every solution of system (2.5) with x1(0) > 0, x2(0) > 0approaches Ei .
Proof We prove the theorem only for the case that ER1 exists and it is asymptoticallystable and ES2 exists and it is unstable as the proofs of other cases are similar. Itfollows from the comparison argument (5.22) and Theorem 1 that the omega limit setof every solution of (3.1) lies in
T = {X ∈ R6+ : ES2 ≤K X ≤K ER1} (5.23)
where ER1 and ES2 are equilibria of (3.1) corresponding to ER1 and ES2, respectively.Note that T does not contain an equilibrium in its interior according to Lemma 6.
123

B. Li, H. L. Smith
Let X1(r, t) be a solution of (3.1) starting at a point on YS2(r) for small r . Thenby Lemma 8, X1(t) approaches an equilibrium with the x1 component approachingmonotonely a positive number. This equilibrium must be ER1. If X is an interior pointof T , then one can choose r so small that X1(r, 0) ≤K X ≤K ER1 for small r . TheSqueeze Theorem shows that the omega limit set of the solution of (3.1) with startingpoint at X must be ER1.
On the other hand, if an omega limit point of a solution lies on the boundary ofT , the proof of Proposition 5.5 of Smith and Waltman [26] essentially works to showthat the omega limit point must be ER1. We have shown that the omega limit set ofevery solution of (3.1) must contain ER1. Consequently, the omega limit set of everysolution of (2.5) must contain ER1. Since ER1 is asymptotically stable, the omegalimit set of every solution of (2.5) must be ER1. The proof is complete. �
We next establish the global coexistence of two species.
Theorem 3 If both Ei exist and are unstable in the linear approximation, then acoexistence equilibrium E12 exists, and every solution of system (2.5) with xi (0) > 0,
i = 1, 2 approaches E12 as t → ∞.
Proof We prove the theorem for the case that ER1 exists and it is unstable, and ES2exists and it is unstable as the proof of the other case is similar. In this case, in viewof Table 1, we have
λR1 > λR2, λS1 < λS2
and
σR1
Q R1S1
>R0 − λR1
S0 − λS2>
QS2R2
σS2. (5.24)
Note that the second inequality in (5.24) shows that R0 − S0−λS2σS2
QS2R2 > λR1. This
together with the first equation of (5.9) and the first equation of (5.5) shows thatQS2
R2 > Q RSR2 . Similarly, one can show Q R1
S1 > Q RSS1 . From these and (5.24) we have
σR1
Q RSS1
>R0 − λR1
S0 − λS2>
Q RSR2
σS2.
It follows from Table 2 that E12 exists.It follows from the comparison argument (5.22) and Theorem 1 that the omega
limit set of every solution of (3.1) lies in T described in (5.23). The proof of Propo-sition 5.5 of Smith and Waltman [26] essentially works to show that an omega limitpoint of a solution of (3.1) cannot lie on the boundary of T . Let Xω be an omega limitpoint of a solution of (3.1). It must be an interior point of T . Consider the region
W = {X ∈ R6+ : YS2(r) ≤K X ≤K E12}
123

A competition model based on storage
for small r where E12 is the equilibrium of (3.1) corresponding to E12. Consider asolution X1(t) of (3.1) starting at a point on YS2(r) for small r . Then by Lemma 8,X1(t) approaches an equilibrium with the x1 component approaching monotonely apositive number. Note that E12 is the only equilibrium in the region W with the prop-erty that its x1 component is positive. We therefore have X1(t) → E12 as t → ∞.Similarly one can show that if X2(t) is a solution of (3.1) starting at a point on YR1(r)
for small r , then X2(t) → E12 as t → ∞. We now choose r sufficiently small suchthat X1(0) ≤K Xω ≤K X2(0). We immediately have that the solution starting at Xω
approaches E12 as t → ∞. We have show that E12 is an omega limit point of everypositive solution of (3.1) and E12 is asymptotically stable. It follows that E12 attractsevery positive solution of (3.1). Consequently, E12 attracts every positive solution of(2.5). �Theorem 4 Let both E1 and E2 exist and be asymptotically stable in the linear approx-imation so E12 exists by Proposition 3. Then E12 is unstable in the linear approxima-tion. In addition, if Bi denotes the basin of attraction of Ei and Sptr x = �\(B1∪B2),then Sptr x contains no totally ordered line segment. Consequently, it is nowhere denseand has measure zero.
Proof The vector field is continuously differentiable near E12 and the Jacobian is non-degenerate as noted in Proposition 2. The proof of Theorem E.1 of [27] establishesthat the stability modulus of the Jacobian at E12 is nonnegative, and hence positive ifthe Jacobian is nonsingular. It follows that E12 is unstable in the linear approximation.This implies that the basin of attraction of E12 is unordered and has measure zero. SeeLemma 2.1 [25] which remains valid under our assumptions.
Since the Jacobian matrix J at E12 is irreducible and has a positive dominanteigenvalue λ, there is a corresponding eigenvector v �K 0. Therefore, there is aone dimensional “most unstable” manifold C containing E12 [28]. It consists of E12together with two branches C+ and C− with E12 <K C+ and C− <K E12. C+ andC− are monotone orbits with alpha limit set E12. C+ is the image of a monotoneincreasing globally defined solution with omega limit set an equilibrium, the onlycandidate being E1 since it is the only equilibrium larger than E12. Similarly, C− isthe orbit corresponding to a monotone decreasing solution converging to E2.
Standard comparison arguments comparing heteroclinic solutions starting on C+with other solutions starting in [E12, E1]K establish that every orbit in the positivelyinvariant order interval [E12, E1]K except for E12 converges to E1. Similar argumentsshow that every orbit in [E2, E12]K except for E12 converges to E2.
Standard persistence theory (Theorem 4.6 of [31]) can be used to show that (3.1)is p-persistent on � for p = x1 + x2 in the sense that there exists ε > 0 such thatlim inf t→∞ p ≥ ε for all solutions with p > 0 at t = 0. This ensures that E0 does notbelong to the omega limit set of any orbit starting at a point where p > 0.
Let Bi denote the basin of attraction of Ei and let S = � \ (B1 ∪ B2 ∪ {E0}). Scontains E12 and is positively invariant for the semiflow generated by (3.1). If z ∈ Sthen UNi , xi > 0 for i = 1, 2, N = R, S since if any of UR1, US1 or x1 vanishes thenthey all vanish and the point belongs to B2, a contradiction. Therefore, the semiflow isstrongly order preserving on S. By its construction, orbits initiating in S have compactclosure in S. We can now apply the same argument used in the proof of Theorem 1
123

B. Li, H. L. Smith
in [25] to conclude that S contains no totally ordered line segment. Therefore, S isnowhere dense and has measure zero. �
6 Dynamics of full system (2.1)
In this section, we extend the earlier results for (2.5) to the full system (2.1). It will beuseful to abuse notation by using the same notation for the equilibria E0, Ei , E12 forboth systems since it will be clear from the context which is intended.
Theorem 5 If the hypotheses of Theorem 2 hold, then its conclusion holds for (2.1).
Proof Use Theorem F.1 of [27]. �Theorem 6 If the hypotheses of Theorem 3 hold, then its conclusion holds for (2.1).
Proof First show that both populations uniformly persist using Theorem 4.6 of [31].If ω is an omega limit set of a solution of (2.1) with xi (0) > 0, i = 1, 2 then ω
is a compact invariant set for the semiflow generated by (2.5) [22]. By the uniformpersistence of each population, it follows that ω is contained in the basin of attractionof E12 relative to (2.5). By invariance of ω with respect to the semiflow of (2.5), itmust be {E12}. �
We are unable to conclude that most solutions of (2.1) converge either to E1 or toE2 when the hypotheses of Theorem 4 hold. However, we have the following result.
Theorem 7 Let the hypotheses of Theorem 4 hold. Then there exists ε > 0 such thatfor every solution of (2.1) with xi (0) > 0, i = 1, 2, we have
lim inft→∞ (x1(t) + x2(t)) > ε.
The omega limit set ω of a solution of (2.1) with xi (0) > 0, i = 1, 2, satisfies one ofthe following:
(a) ω = {E1}, or(b) ω = {E2}, or(c) ω ⊂ Sptr x.
If Bi denotes the basin of attraction of Ei for (2.1), then Bi is open in �. The basinof attraction of E12 for (2.1) contains no open set if E12 is hyperbolic.
Proof Standard persistence theory (Theorem 4.6 of [31]) leads to the persistence con-clusion. We give some details here using the notation of [31]. If X denotes the phasespace for (2.1) and p = (R, S, Q R1, QS1, x1, Q R2, QS2, x2) denotes a point of X , letX1 = {p ∈ X : x1 + x2 > 0} and X2 = {p ∈ X : x1 = x2 = 0}. Note that the Xi
are positively invariant and X2 is just the stable manifold of E0. The union of omegalimit sets of all points of X2, 2, is precisely {E0}. It suffices to show that {E0} is aweak repeller for X1: lim supt→∞(x1(t) + x2(t)) > 0 for every solution starting inX1. If false, then some solution starting in X1 converges to E0. But this contradictsthat the stable manifold of E0 is X2.
123

A competition model based on storage
ω is invariant and internally chain recurrent subset of � for the limiting semiflowgenerated by (2.5) [22]. If ω∩ Bi = ∅ then ω = Bi by Theorem 3.1 of [14] or Lemma4.1 of [30]. The persistence result shows that E0 /∈ ω. Hence, if neither (a) nor (b)hold then (c) holds. The remaining conclusions follow from standard arguments. �7 Simulations
We provide some simulations to illustrate our theoretical results. Following Droop’sformulation, we choose
µNi (QNi ) = µmax,Ni (1 − Qmin,Ni/QNi )
for N = R, S and i = 1, 2. For simplicity we assume that ρNi (N , QNi ) only dependson N and choose
ρNi (N , QNi ) = ρNi,maxN
KNi + N
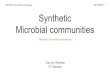
for N = R, S and i = 1, 2. We choose R0 = 3, S0 = 20, Qmin,R1 = 1.64, Qmin,S1 =45.4, µmax,R1 = µmax,S1 = 1.35, ρR1,max = 12.3, ρS1,max = 341, K R1 =0.2, KS1 = 5.6, D = 0.59. These parameter values were used by Klausmeier etal. [17] to show numerically the dynamics of growth of a single phytoplankton spe-cies on two essential resources based on storage. We next give three different sets ofparameter values associated with the second species to demonstrate the competitiveexclusion, coexistence, and bi-stability properties in model (2.1). Parameters not men-tioned are the same as for species one.
parameter 2 beats 1 (Fig. 1) Coexistence (Fig. 2) Bi-stability (Fig. 3)
Qmin,R2 2 7 2
Qmin,S2 30 15 30
ρR2,max 8 24 4
ρS2,max 380 380 380
K R2 0.4 0.4 0.4
KS2 7.6 7.2 7.2
For the parameters of Fig. 1, ES1 is unstable and ES2 is stable so solutions of (2.1)approach ES2. For the parameters of Fig. 2, ES1 and ER2 are unstable and solutionsof (2.1) approach a coexistence equilibrium. For the parameters of Fig. 3, ES1 andES2 are stable and solutions of (2.1) approach either ES1 or ES2 depending on initialvalues.
8 Discussion
In this paper, we studied the global dynamics of a chemostat model based on stor-age that describes two species competing exploitatively for two essential resources.
123

B. Li, H. L. Smith
x
0.35
0.3
0.25
0.2
0.15
0.1
0.05
0
x1
x2
time
100806040200
Species abundances
Fig. 1 Competitive exclusion: time courses of the abundances of two species with initial values R(0) =0.1, S(0) = 3, Q R1(0) = 3, QS1(0) = 5, Q R2(0) = 2, QS2(0) = 10, x1(0) = 0.25, x2(0) = 0.4. Thesolution approaches E2
Species abundances
x1
x
0.14
0.12
0.1
0.08
0.06
0.04
x2
time300250200150100500
Fig. 2 Coexistence: time courses of the abundances of two species with initial values R(0) = 0.1, S(0) = 3,
Q R1(0) = 3, QS1(0) = 5, Q R2(0) = 2, QS2(0) = 10, x1(0) = 0.1, x2(0) = 0.14. The solutionapproaches a coexistence equilibrium
123

A competition model based on storage
x
0.25a
b
0.2
0.15
0.1
0.05
0
x1
time
120100806040200
Species abundances
x2
x
0.35
0.3
0.25
0.2
0.15
0.1
0.05
0
time
120100806040200
Species abundances
x2
x1
Fig. 3 Bi-stability. a Time courses of the abundances of two species with initial values R(0)=0.1, S(0)=3,
Q R1(0) = 3, QS1(0) = 5, Q R2(0) = 2, QS2(0) = 10, x1(0) = 0.25, x2(0) = 0.08. The solutionapproaches E1. b Time courses of the abundances of two species with initial values R(0)=0.1, S(0)=3,
Q R1(0) = 3, QS1(0) = 5, Q R2(0) = 2, QS2(0) = 10, x1(0) = 0.25, x2(0) = 0.1. The solutionapproaches E2
This model assumes that species growth is related to not only the external concentra-tions of limiting resources but also the internal resource concentrations. The modelhighlights the importance of resource storage that is not represented in the classical
123

B. Li, H. L. Smith
chemostat model in which quotas of resources in species are constant. It has been longknown that resource storage takes place in phytoplankton ecology [7]. When resourcestorage occurs, the quotas of resources per individual varies in the process of resourcecompetition, and the per capita rate of population increase is assumed to depend onthe amount of resource an individual has captured.
In this paper, a fairly complete global analysis of the model of two species com-peting for two essential resources was given using the monotone dynamical systemtheory. We established criteria for the existence of mono-culture equilibria and andtheir asymptotical stability, based on which we determined the global dynamics of themodel. It was shown that if one mono-culture equilibrium is stable, and the secondmono-culture equilibrium is unstable, then the former mono-culture equilibrium isglobally attracting; if both mono-culture equilibria are unstable, then a coexistenceequilibrium exists and it is globally attracting; if both mono-culture equilibria are sta-ble, then solutions may approach one of the two mono-culture equilibria dependingon initial values under some technical assumptions.
We showed that the possible outcomes of competition between two species for twoessential resources based on storage are identical to those of competition betweentwo species for two essential resources without internal storage (see [16,20,21]) inthe classical chemostat. In the model without internal storage, the quotas of resourcesare effectively yield constants; in the resource competition model based on storage,the quotas are variables. The quotas may be different at different equilibria, and theypartially determine the stability of mono-culture equilibria (see Table 1).
The familiar Lotka-Volterra alternatives hold for the resource competition model(2.1). However, there are biologically important differences between the Lotka-Vol-terra competition theory and the resource competition theory. In the Lotka-Volterracompetition model, the outcomes of competition are determined by the carrying capac-ity constants and the competition coefficients. The functions of resources are hidden inthese parameters and the competition coefficients can only be estimated after compe-tition has already occurred. Hence no prediction of the outcome of competition can bemade based on the Lotka-Volterra competition theory. In the model (2.1), the dynam-ics of resources are explicitly incorporated, and the growth of populations dependson availability of resources. Our results show that competitive outcomes are predict-able from knowledge of the resource-dependent consumption and growth rate of eachcompeting population studied alone.
9 Appendix
Lemma 9 Let a, b > 0. Then the system
ρR(a, Q R) − min(µR(Q R), µS(QS))Q R = 0(9.1)
ρS(b, QS) − min(µR(Q R), µS(QS))QS = 0
has a unique solution (Q R, QS) with QN > PN , N = R, S. The set of all (a, b) suchthat µR(Q R) = µS(QS) is open and dense.
123

A competition model based on storage
Proof Due to our monotonicity conditions, it is easy to see that the pair of uncoupledequations
ρR(a, Q R) − µR(Q R)Q R = 0
ρS(b, QS) − µS(QS)QS = 0
has a unique solution Q R(a) > PR and QS(b) > PS . There are three cases dependingon the relationship of the numbers µR(Q R), µS(QS). If µR(Q R) < µS(QS) one seesthat the equation
ρS(b, QS) − µR(Q R)QS = 0
must have a unique solution QS > QS(b) and that (Q R, QS) is the only solutionof (9.1). A symmetric argument applies if µR(Q R) > µS(QS). If equality holds,it follows that (Q R(a), QS(b)) is the unique solution of (9.1) and our monotonic-ity assumptions imply that a slight change in either a or b result in inequality ofµR(Q R(a) < µS(QS(b)). �
1. Eigenvalues of JE0
The Jacobian matrix at E0 is given by
JE0 =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
−d11 −d12 −d13 0 0 −d16
−d21 −d22 −d23 0 0 −d26
0 0 min(µR1(Q0R1), µS1(Q0
S1)) − D 0 0 0
0 0 −d43 −d44 −d45 −d46
0 0 −d53 −d54 −d55 −d56
0 0 0 0 0 min(µR2(Q0R2), µS2(Q0
S2)) − D
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
where each di j ≥ 0. In particular, d11 = − ∂ρR1∂ Q R1
+ Q0R1
∂min(µR1(Q0R1),µS1(Q0
S1))
∂ Q R1+
min(µR1(Q0R1), µS1(Q0
S1)), d12 = Q0R1
∂min(µR1(Q0R1),µS1(Q0
S1))
∂ QS1, d13 = Q0
R1∂ρR1∂ R ,
d16 = Q0R2
∂ρR1∂ R , d21 = Q0
S1∂min(µR1(Q0
R1),µS1(Q0S1))
∂ Q R1,
d22 = Q0S1
∂min(µR1(Q0R1),µS1(Q0
S1))
∂ QS1+ min(µR1(Q0
R1), µS1(Q0S1)) − ∂ρS1
∂ QS1, d23 =
Q0S1
∂ρS1∂S , d26 = Q0
S2∂ρS1∂S , d43 = Q0
R1∂ρR2∂ R , d45 = Q0
R2∂min(µR2(Q0
R2),µS2(Q0S2))
∂ QS2, d44 =
− ∂ρR2∂ Q R2
+Q0R2
∂min(µR2(Q0R2),µS2(Q0
S2))
∂ Q R2+min(µR2(Q0
R2), µS2(Q0S2)), d46 = Q0
R2∂ρR2∂ R ,
d53 = Q0S1
∂ρS2∂S , d55 = − ∂ρS2
∂ QS2+ Q0
S2∂min(µR2(Q0
R2),µS2(Q0S2))
∂ QS2+ min(µR2(Q0
R2),
µS2(Q0S2)), d54 = Q0
S2∂min(µR2(Q0
R2),µS2(Q0S2))
∂ Q R2, d56 = Q0
S2∂ρS2∂S .
Note that one of d12 and d21 and one of d54 and d45 must be zero.It is easy to see that JE0 has eigenvalues −d11,−d22,−d55,−d44, min(µR1(Q0
R1),
µS1(Q0S1)) − D,min(µR2(Q0
R2), µS2(Q0S2)) − D.
123

B. Li, H. L. Smith
2. Eigenvalues of JER1
The Jacobian matrix at ER1 is given by
JER1 =
⎡⎢⎢⎢⎢⎢⎢⎣
−c11 0 −c13 0 0 −c16−c21 −c22 −c23 0 0 −c26
c31 0 0 0 0 0−c41 0 −c43 −c44 −c45 −c46
0 −c52 −c53 −c54 −c55 −c56
0 0 0 0 0 min(µR2(Q R1R2), µS2(Q R1
S2 )) − D
⎤⎥⎥⎥⎥⎥⎥⎦
where all ci j are nonnegative. In particular, c11 = x R11
∂ρR1∂ R − ∂ρR1
∂ Q R1+ µ′
R1σR1 +µR1, c13 = σR1
∂ρR1∂ R , c16 = Q R1
R2∂ρR1∂ R , c21 = µ′
R1 Q R1S1 , c22 = x R1
1∂ρS1∂S − ∂ρS1
∂ QS1+
µR1, c23 = Q R1S1
∂ρS1∂S , c26 = Q R1
S2∂ρS1∂S , c41 = x R1
1∂ρR2∂ R , c43 = σR1
∂ρR2∂ R , c45 =
Q R1R2
∂min(µR2(Q R1R2),µS2(Q R1
S2 ))
∂ QS2, c44 = − ∂ρR2
∂ Q R2+ Q R1
R2∂min(µR2(Q R1
R2),µS2(Q R1S2 ))
∂ Q R2+
min(µR2(Q R1R2), µS2(Q R1
S2 )), c46 = Q R1R2
∂ρR2∂ R , c52 = x R1
1∂ρS2∂S , c53 = Q R1
S1∂ρS2∂S ,
c55 = − ∂ρS2∂ QS2
+ Q R1S2
∂min(µR2(Q R1R2),µS2(Q R1
S2 ))
∂ QS2+ min(µR2(Q R1
R2), µS2(Q R1S2 )), c54 =
Q R1S2
∂min(µR2(Q R1R2),µS2(Q R1
S2 ))
∂ Q R2, c56 = Q R1
S2∂ρS2∂S , c31 = x R1
1 µ′R1.
Note that one of c54 and c45 must be zero. The eigenvalues are always given
by min(µR2(Q R1R2), µS2(Q R1
S2 )) − D, −c22, −c55, −c44,−c11 −
√c2
11 − 4c13c31
2,
−c11 +√
c211 − 4c13c31
2.
3. Unstable manifold of ER1 near ER1
Let X =< Q R1, QS1, x1, RR2, QS2, x2 > be an eigenvector corresponding to thepositive eigenvalue
λ = min(µR2(Q R1R2), µS2(Q R1
S2 )) − D.
Then X satisfies
(λI − JER1)X T = 0. (9.2)
The first two equations of this system are
(λ + c11)Q R1 + c13x1 + c16x2 = 0, (9.3)
c21 Q R1 + (λ + c22)QS1 + c23x1 + c26x2 = 0. (9.4)
Solving (9.2), we have
x1 = c31
λQ R1, x2 = −λ2 + λc11 + c13c31
λc16Q R1,
123

A competition model based on storage
and
QS1 = c26λ2 + (c11c26 − c16c21)λ + c26c13c31 − c16c23c31
λc16(λ + c22)Q R1.
The part of the unstable manifold of ER1 can be expressed near ER1 as
X R1(r) = ER1 + r X + o(r).
In the new system (3.1), X R1(r) takes the form
YR1(r) = (x R11 σR1 + r(x1σR1 + x R1
1 Q R1), x R11 Q R1
S1 + r(x1 Q R1S1 + x R1
1 QS1),
x R11 + r x1, r x2 Q R1
R2, r x2 Q R1S2 , r x2) + o(r).
Let
F(YR1)(r) = (F1(YR1)(r), F2(YR1)(r), F3(YR1)(r), F4(YR1)(r),
F5(YR1)(r), F6(YR1)(r))
denote the right side of (3.1). Then straightforward calculation shows
F1(YR1)(r) = r [−∂ρR1
∂ R1(x R1
1 Q R1 + x1σR1 + x2 Q R1R2) + ∂ρR1
∂ Q R1Q R1 − DQ R1]x R1
1 ,
and
F2(YR1)(r) = r [−∂ρS1
∂S1(x R1
1 QS1 + x1 Q R1S1 + x2 Q R1
S2 ) + ∂ρS1
∂ QS1QS1 − DQS1]x R1
1 .
One then uses condition (9.3) and the expression for c11 to find
F1(YR1)(r) = r x R11 (λ + µ′
R1σR1)Q R1 + o(r).
Note that x R11 (λ + µ′
R1σR1) > 0. One uses condition (9.4) and the expression for c22to see
F2(YR1)(r) = r x R11 (λQS1 + c21 Q R1) + o(r).
One then uses condition (9.4) and expression for x1, x2 and QS1 to find that
λQS1 + c21 Q R1 = c26λ2 + c11c26λ + c13c26c31 + c16c21c22 − c16c23c31
c16(λ + c22)Q R1.
Using expressions for c21, c22, c23 and c31, we find
c21c22 − c23c31 = (µR1 − ∂ρS1
∂ QS1)µ′
R1 Q R1S1 > 0.
123

B. Li, H. L. Smith
We therefore have
F2(YR1)(r) = r x R11 AQ R1 + o(r)
where A > 0. Direct calculation shows
F3(YR1)(r) = (µR1(x R1
1 Q R1R1 + r(x1 Q R1
R1 + x R11 Q R1)
x R11 + r x1
− D)(x R11 + r x1)
= rµ′R1 Q R1x R1
1 ,
F4(YR1)(r) = rλQ R1S2 x2 + o(r),
F5(YR1)(r) = r x2(ρR2(R0 − x R11 Q R1
R1, Q R1R2) − DQ R1
R2) = rλQ R1R2x2 + 0(r),
and
F6(YR1(r) = rλx2.
References
1. Andersen, T.: Pelagic Nutrient Cycles. Springer, New York (1997)2. Caperon, J.: Population growth response of Isochrysis galbana to nitrate variation at limiting concen-
trations. Ecology 49, 866–872 (1968)3. Cunningham, A., Nisbet, R.M.: Time lag and c0-perativity in the transient growth dynamics of
microalage. J. Theor. Biol. 84, 189–203 (1980)4. Cunningham, A., Nisbet, R.M.: Transient and oscillations in continuous culture. In: Bazin, M.J. (ed.)
Mathematics in Microbiology. Academic, New York, pp.77–1035. De Leenheer, P., Levin, S., Sontag, E., Klausmeier, C.: Global stability in a chemostat with multiple
nutrients. J. Math. Biol. 52, 419–438 (2006)6. Droop, M.R.: Vitamin B12 and marine ecology. IV. The kinetics of uptake, growth and inhibition in
Monochrysis Lutheri. J. Mar. Biol. Assoc. UK 48, 689–733 (1968)7. Droop, M.R.: Some thoughts on nutrient limitation in algae. J. Phycol. 9, 264–272 (1973)8. Droop, M.R.: The nutrient status of algae cells in continuous culture. J. Mar. Biol. Assoc. UK 54, 825–
855 (1974)9. Gopalsamy, K.: Stability and Oscillations in Delay Differential Equations of Population Dynamics.
Kluwer, Dordrecht (1992)10. Grover, J.P.: Resource Competition in a variable environment: phytoplankton growing according to
the variable-internal-stores model. Am. Nat. 138, 811–835 (1991)11. Grover, J.P.: Constant- and variable-yield models of population growth: responses to envionmental
variability and implications for competition. J. Theor. Biol. 158, 409–428 (1992)12. Grover, J.P.: Resource Competition, Population and Community Biology Series, 19. Chapman &
Hall, New York (1997)13. Hirsch, M.W., Hanisch, H., Gabriel, J.P.: Differential equation models of some parasitic infections:
methods for the study of asymptotic behavior. Commun. Pure Appl. Math. 38, 733–753 (1985)14. Hirsch, M.W., Smith, H.L., Zhao, X.-Q.: Chain transitivity, attractivity and strong repellors for semi-
dynamical systems. J. Dyn. Differ. Equ. 13, 107–131 (2001)15. Hsu, S.B., Smith, H.L., Waltman, P.: Competitive exclusion and coexistence for competitive systems
on ordered Banach spaces. Trans. AMS 348, 4083–4094 (1996)
123

A competition model based on storage
16. Hsu, S.B., Cheng, K.S., Hubbell, S.P.: Exploitative competition of microorganism for two complemen-tary nutrients in continuous culture. SIAM J. Appl. Math. 41, 422–444 (1981)
17. Klausmeier, C., Litchman, E., Levin, S.: Phytoplankton growth and stoichiometry under multiplenutrient limitation. Limnol. Oceanogr. 49, 1463–1470 (2004)
18. Koch, A.L.: Bacterial choices for consumption of multiple resources for current and future needs. Mic-rob. Ecol. 49, 183–197 (2005)
19. Legovic, T., Cruzado, A.: A model of phytoplankton growth on multiple nutrients based on the Micha-elis–Menten–Monod uptake, Droop’s growth and Liebig’s law. Ecol. Modell. 99, 19–31 (1997)
20. Leon, J.A., Tumpson, D.B.: Competition between two species for two complementary or substitutableresources. J. Theor. Biol. 50, 185–201 (1975)
21. Li, B., Smith, H.L.: Competition for essential resources: a brief review. In: Ruan, S., Wolkowicz,G.S.K., Wu, J. (eds.) Dynamical Systems and Their Applications in Biology. Fields Inst. Commun. 36,213–227 (2003)
22. Mischiakow, K., Smith, H.L., Thieme, H.: Asymptotically autonomous semiflows: chain recurrenceand Lyapunov functions. Trans. AMS 347, 1669–1685 (1995)
23. Morel, F.M.M.: Kinetics of nutrient uptake and growth in phytoplankton. J. Phycol. 23, 137–150 (1987)24. Narang, A., Pilyugin, S.S.: Towards an integrated physiological theory of microbial growth: from
subcellular variables to population dynamics. Math. Biosci. Eng. 2, 173–210 (2005)25. Smith, H.L., Thieme, H.R.: Stable coexistence and bi-stability for competitive systems on ordered
Banach spaces. J. Differ. Equ. 176, 195–2221 (2001)26. Smith, H.L., Waltman, P.: Competition for a single limiting resource in continuous culture: the vari-
able-yield model. SIAM J. Appl. Math. 54, 1113–1131 (1994)27. Smith, H.L., Waltman, P.: The Theory of the Chemostat. University Press, Cambridge (1995)28. Smith, H.L.: Monotone Dynamical Systems. AMS, Providence (1995)29. Smith, H.L.: Competing subcommunities of mutualists and a generalized Kamke theorem. SIAM
J. Appl. Math. 46, 856–874 (1986)30. Smith, H.L., Zhao, X.-Q.: Dynamics of a periodically pulsed bio-reactor model. J. Differ. Equ. 155, 368–
404 (1999)31. Thieme, H.R.: Persistence under relaxed point-dissipativity (with application to an endemic
model). SIAM J. Math. Anal. 24, 407–435 (1993)32. Tilman, D.: Resource competition and Community Structure. Princeton University Press, Princeton
(1982)33. Tilman, D.: Plant Strategies and the Dynamics and Structure of Plant Communities. Printceton Uni-
versity Press, Princeton (1988)
123












![BACTERIOPHAGE-RESISTANT AND BACTERIOPHAGE-SENSITIVE ...halsmith/phagemutantsubmitted_2.pdf · BACTERIOPHAGE-RESISTANT AND BACTERIOPHAGE-SENSITIVE BACTERIA IN A CHEMOSTAT ... [22],](https://img.pdfslide.net/doc/110x75/5b3839687f8b9a5a518d2ce1/bacteriophage-resistant-and-bacteriophage-sensitive-halsmithphagemutantsubmitted2pdf.jpg)