Embed Size (px)
Citation preview

This article was downloaded by: [Monash University Library]On: 21 March 2013, At: 02:04Publisher: Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House,37-41 Mortimer Street, London W1T 3JH, UK
International Journal of ControlPublication details, including instructions for authors and subscription information:http://www.tandfonline.com/loi/tcon20
Global stabilisation of high-order nonlinear systemswith multiple time delaysZong-Yao Sun a , Xue-Jun Xie a & Zhen-Guo Liu aa Institute of Automation, Qufu Normal University, Qufu, Shandong Province, 273165, P. R.ChinaVersion of record first published: 18 Mar 2013.
To cite this article: Zong-Yao Sun , Xue-Jun Xie & Zhen-Guo Liu (2013): Global stabilisation of high-order nonlinear systemswith multiple time delays, International Journal of Control, DOI:10.1080/00207179.2012.760046
To link to this article: http://dx.doi.org/10.1080/00207179.2012.760046
PLEASE SCROLL DOWN FOR ARTICLE
Full terms and conditions of use: http://www.tandfonline.com/page/terms-and-conditions
This article may be used for research, teaching, and private study purposes. Any substantial or systematicreproduction, redistribution, reselling, loan, sub-licensing, systematic supply, or distribution in any form toanyone is expressly forbidden.
The publisher does not give any warranty express or implied or make any representation that the contentswill be complete or accurate or up to date. The accuracy of any instructions, formulae, and drug doses shouldbe independently verified with primary sources. The publisher shall not be liable for any loss, actions, claims,proceedings, demand, or costs or damages whatsoever or howsoever caused arising directly or indirectly inconnection with or arising out of the use of this material.

International Journal of Control, 2013http://dx.doi.org/10.1080/00207179.2012.760046
Global stabilisation of high-order nonlinear systems with multiple time delays
Zong-Yao Sun∗, Xue-Jun Xie and Zhen-Guo Liu
Institute of Automation, Qufu Normal University, Qufu, Shandong Province 273165, P. R. China
(Received 28 February 2012; final version received 13 December 2012)
This paper focuses on the stabilisation for a class of high-order nonlinear systems with multiple time delays. Growthrestriction on system nonlinearities is further relaxed. Design procedures of a continuous controller are provided by themethod of adding a power integrator, and the stability of the resulting closed-loop system is rigorously proven with the helpof the elegant choice of a Lyapunov–Krasovskii functional. Finally, a simulation example is provided to demonstrate thevalidness of the proposed approach.
Keywords: high-order nonlinear system; multiple time delays; adding a power integrator; Lyapunov–Krasovskii functional
1. Introduction
Time-delay phenomena exist in many practical systemssuch as mechanical, biological and economical systems,and the emergence of time-delay is often the significantcause of instability and the serious deterioration in the sys-tem performance, so a number of researches have paid care-ful attention to time-delay systems. Ever since the surveyon the problems of the time-delay systems (Richard, 2003),although great progress has been made for time-delay linearsystems (see for instance Gu, Kharitonov, & Chen (2003);Zhong (2006) and the references therein), there are stillmany important and interesting control problems for time-delay nonlinear systems from the theoretical point of view.
In this paper, we consider a class of high-order time-delay nonlinear systems described by the following form:
⎧⎨⎩
xi(t) = xpi
i+1(t) + fi(xi(t), x1(t − τ1), . . . , xi(t − τi)),i = 1, . . . , n − 1,
xn(t) = upn (t) + fn(x(t), x1(t − τ1), . . . , xn(t − τn)),
(1)
where x(t) = [x1(t), . . . , xn(t)]� ∈ IRn and u(t) ∈ IR arethe system state and the control input, respectively; τi ∈IR+, i = 1, . . . , n are time delays of the state; xi(t) =[x1(t), . . . , xi(t)]�; the system initial condition is x(θ ) =ξ0(θ ), θ ∈ [−τ, 0] with τ ≥ max{τ1, . . . , τn} and ξ0(·)being specified continuous initial function; pi ∈ IR≥1
odd :={p
q| p and q are positive odd integers, and p ≥ q}, i = 1,
. . . , n; fi, i = 1, . . . , n are unknown continuous func-tions.
When pi > 1, the apparent feature of system (1) is thatits Jacobian linearisation at the origin is neither controllable
∗Corresponding author. E-mail: [email protected]
nor feedback linearisable, so the traditional design toolssuch as feedback linearisation (Isidori, 1995) or backstep-ping (Krstic, Kanellakopoulos, & Kokotovic, 1995; Wu,Xie, & Zhang, 2007) are hardly applicable to the system(1). For the case of τi = 0, with the help of the adding apower integrator method, a series of research results havebeen achieved over the past 10 years, see, e.g. Qian andLin (2001), Lin and Qian (2002), Lin and Pongvuthithum(2003b), Sun and Liu (2007) and Sun and Liu (2009)for the stabilisation and Qian and Lin (2002), Lin andPongvuthithum (2003a), Sun and Liu (2008) and Yan andLiu (2010) for the tracking, respectively.
The existence of time delays in system (1) rendersthe control design much more difficult, for the specialcase of pi = 1, mainly thanks to backstepping method-ology, some results have been achieved. Ge, Hong, andLee (2003) constructed a neural network controller to con-trol a class of time-delay nonlinear systems with triangu-lar structure, further research can be found in Daniel, Li,and Niu (2005). Based on the Lyapunov–Krasovskii (L-K)functional method, Mazenc and Bliman (2006) presented acontinuously differentiable state-feedback control design,and Hua, Guan, and Shi (2005) constructed an outputfeedback controller independent of time-delay. Based onLyapunov–Razumikhin (L-R) function method, Jiao andShen (2005) solved the adaptive stabilisation problem byverifying the convergence of a part solution with stabilityfor a class of FDEs, Jiao, Shen, and Sun (2007) solvedthe robust control design for time-delay being constantand Hua, Feng, and Guan (2008) further studied robustcontrol design for time-delay nonlinear systems with un-known time-varying time-delay. The readers can also seethe lastly published papers (Ito, Pepe, & Jiang, 2010;
C© 2013 Taylor & Francis
Dow
nloa
ded
by [
Mon
ash
Uni
vers
ity L
ibra
ry]
at 0
2:04
21
Mar
ch 2
013

2 Z.-Y. Sun et al.
Krstic, 2010; Mazenc, Malisoff, & Lin, 2008; Pepe & Jiang,2006). However, there are fewer results on high-order time-delay nonlinear systems, for instance, see Zhang, Boukas,Liu, and Baron (2010), Zhang, Liu, Baron, and Boukas(2011), and Sun, Liu, and Xie (2011) or the other refer-ences. Specifically, Zhang et al. (2010, 2011) studied thecase of time delay entering the system input, Sun et al.(2011) studied the case of time delay entering the systemstates.
In this paper, we will continue the investigation startedin Sun et al. (2011), study how to design a continuousstate-feedback stabilising controller for a class of high-order time-delay nonlinear systems. Mainly motivated bythe continuous control ideas in Qian and Lin (2001) andSun and Liu (2009), we flexibly use the adding a powerintegrator method to present the recursive design procedurefor a continuous state-feedback controller independent oftime-delay. Then, we construct an appropriate Lyapunov–Krasovskii functional inspired by Ge et al. (2003), Danielet al. (2005) and Sun et al. (2011), and by means of itwe show that the designed controller guarantees globallyasymptotic stability of the resulting closed-loop system.
The main contributions of the paper are characterisedby the following specific features:
(1) The presence of time-delay makes the common as-sumption on the high-order system nonlinearities infeasi-ble, so one difficulty is how to identify and further relaxconditions placed on them. This paper will partially solvethis problem, and the detailed statements are given below inAssumption 2.1, which shows that system (1) is more gen-eral than those in some existing references. For instance, ifτi = 0, then it becomes the system model in Qian and Lin(2001). It coincides with the system in Hua et al. (2005)with pi = 1, and it is the one in Sun et al. (2011) withτi = τ .
(2) Due to the higher power, multiple time delays andrelaxed restrictions on the nonlinearities, it is not easy to finda L-K functional which can be behaved well in theoreticalanalysis. This paper will construct a new L-K function, andextend the adding a power integrator method, a powerfultool for the control design of nonlinear systems, to thehigh-order time-delay nonlinear systems.
(3) The appearance of multiple time delays and themanagement of the nonlinearities bring many difficultiesand complexities, this paper will overcome these difficul-ties and design a continuous controller which guaranteesthe resulting closed-loop system is globally asymptoticallystable.
This paper is organised as follows. Section 2 formulatesthe control objective, and presents the detailed design pro-cedures for a continuous controller. Section 3 summarisesthe main results. Section 4 gives a simulation example to il-lustrate the effectiveness of the theoretical results. Section 5addresses some concluding remarks. This paper ends upwith three appendices.
Notations: IR+ stands for the set of all the non-negativereal numbers; ‖x(t)‖ denotes the Euclidean norm of avector x(t) = [x1(t), . . . , xn(t)]� ∈ IRn, that is, ‖x(t)‖ =√∑n
i=1 x2i (t) and ‖xt‖C = sup−τ≤θ≤0 ‖x(t + θ )‖, t ≥ 0;
a continuous function h : IR+ → IR+ satisfying h(0) = 0is called a K∞ function if it is strictly increasing andlims→+∞ h(s) = +∞; the arguments of the functions (orthe functionals) will be omitted or simplified, wheneverno confusion can arise from the context. For instance, wesometimes denote a function f (x(t)) by simply f (x) or f (·)or f .
2. Continuous state-feedback control design
2.1. Problem statement and preliminaries
The purpose of the paper is to design a continuous state-feedback stabilising controller for the system (1) on whichthe following assumption is imposed:
Assumption 2.1: For each i = 1, . . . , n, there exists aknown positive constant C, such that
|fi(xi(t), x1(t − τ1), . . . , xi(t − τi))|
≤ C
i∑j=1
(|xj (t)|
ri+ω
rj + |xj (t − τj )|ri+ω
rj
),
where ω = q
p≥ 0, q is an even integer, p is an odd integer
and ri’s are defined recursively in the following manner:
r1 = 1, ri = ri−1 + ω
pi−1, i = 2, 3, . . . , n. (2)
Assumption 2.1 clearly characterises the increasing prop-erties of the nonlinearities fi’s and shows the separationbetween the time-delay state and no time-delay one. It isnot hard to observe that Assumption 2.1 encompasses thosein some existing results (Daniel et al., 2005; Hua et al.,2005; Polendo & Qian, 2007; Sun et al., 2011). Specifi-cally, when pi = 1, it shows that the system nonlinearitiesfi’s satisfy a linear growth condition, and it is equivalent toAssumption A.4 in Daniel et al. (2005) and Assumption 2in Hua et al. (2005), respectively. If we choose τi = 0,then it reduces to Assumption 1.4 in Polendo and Qian(2007). By letting τi = τ and w = 0, it becomes the bounddescribed in Assumption 1 (see Sun et al., 2011), wherer1 = 1, r2 = 1
p1, . . . , rn = 1
p1···pn−1. In addition, it is rea-
sonable to assume ω being a ratio of an even integer andan odd integer, and one can consult Remark 2.1 in Polendoand Qian (2007) for further discussion (that is, ω is anynon-negative real number).
To accomplish the desired control objective, we firstpresent several technical lemmas and useful propositionswhich will play a crucial role in the later control design.
Dow
nloa
ded
by [
Mon
ash
Uni
vers
ity L
ibra
ry]
at 0
2:04
21
Mar
ch 2
013

International Journal of Control 3
Lemma 2.1 (Qian & Lin, 2001): For x ∈ IR, y ∈ IR andp ∈ IR≥1
odd, there hold
{|x + y|1/p ≤ |x|1/p + |y|1/p,
|x − y| ≤ 2(p−1)/p|xp − yp|1/p.
Lemma 2.2 (Qian & Lin, 2001): For x ∈ IR, y ∈ IR, andpositive numbers a, m, n, there holds
|axmyn| ≤ c(x, y)|x|m+n + n
m + n
(m
c(x, y)(m + n)
) mn
× am+n
n |y|m+n,
where c(x, y) > 0 for any x ∈ IR and y ∈ IR.
Lemma 2.3 (Sun & Liu, 2008): For the continuous func-tion f : [a, b] → IR (a ≤ b), if it is monotone and satisfiesf (a) = 0, then | ∫ b
af (x)dx| ≤ |f (b)| · |b − a|.
Proposition 2.1: ri’s and σ = p1 · · · pnrn+1 satisfy the fol-lowing properties:
(i) ri ∈ IR≥1odd, σ ∈ IR≥1
odd, σri
∈ IR≥1odd, i = 1, . . . , n.
(ii) σ ≥ max1≤i≤n{ri + ω}.Proof: (i) For i = 1, . . . , n, with the definition of ω andEquation (2) in mind, we easily prove ri ∈ IR≥1
odd by in-duction, this and pi ∈ IR≥1
odd imply σ ∈ IR≥1odd, and hence
σri
∈ IR≥1odd.
(ii) For i = 1, . . . , n, by the definition of σ , ω ≥ 0 andpi ≥ 1, we have
σ = ω
⎛⎝n−1∑
j=i
p1 · · · pj
⎞⎠+ p1 · · · pi−1(ri + ω) ≥ ri + ω,
this shows σ ≥ max1≤i≤n{ri + ω}.Before starting the control design procedure, we intro-
duce the following transformations:
⎧⎪⎪⎨⎪⎪⎩
zi(t) = xσri
i (t) − ασri
i−1(t),
αpi
i (t) = −gri+1pi
σ
i zri+1pi
σ
i (t),
u(t) = αn(t),
(3)
where i = 1, . . . , n, and gi’s are positive constants tobe specified later. For the sake of simplicity, we letp0 = g0 = 1, α0(t) ≡ 0, z0(t) ≡ zn+1(t) ≡ 0. From σ ≥ri + ω ≥ ri(see Proposition 2.1), we know that zi’s are con-tinuously differentiable. Using Equation (3), we can obtainthe transformed systems z−systems. Let ξ0(·) be the initialfunction of z−systems, that is, z(θ ) = ξ0(θ ), θ ∈ [−τ, 0].
Next, for k = 1, . . . , n, we define WHk(·) and WDk(·)as follows:
WHk(xk(t))=∫ xk (t)
αk−1(xk−1(t))
(s
σrk − α
σrk
k−1(xk−1(t))) 2σ−ω−rk
σ
ds,
(4)
WDk(t) = (n − k + 1)∫ t
t−τk
z2k(l)dl + (n − k)
×∫ t
t−τk+1
z2k(l)dl, (5)
where τn+1 = 0. Then, we have the following proposition,which clearly characterises the properties of WHk(·) andWDk(·):Proposition 2.2: WHk(·),WDk(·), k = 1, . . . , n are con-tinuously differentiable and satisfy
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
∂WHk(xk(t))
∂xk(t)= z
2σ−ω−rkσ
k (t),
∂WHk(xk(t))
∂xi(t)= −2σ − ω − rk
σ
×∫ xk (t)
αk−1(xk−1(t))
(s
σrk − α
σrk
k−1(xk−1(t))) σ−ω−rk
σ
ds
·∂ασrk
k−1(xk(t))
∂xi(t),
d WDk(t)
d t= (2n − 2k + 1)z2
k(t) − (n − k + 1)z2k(t − τk)
− (n − k)z2k(t − τk+1),
where i = 1, . . . , k − 1. Moreover, the following estimateholds:
2(2σ−ω−rk )(rk−σ )
σrk · rk
2σ − ω· (xk(t) − αk−1(xk−1(t)))
2σ−ωrk
≤ WHk(xk(t)) ≤ 21− rkσ · z
2σ−ωσ
k (t).
Proof: It is easy to see that WDk(·), k = 1, . . . , n are con-tinuously differentiable and satisfy
d WDk(t)
d t= (n − k + 1)z2
k(t) − (n − k + 1)z2k(t − τk)
+ (n − k)z2k(t) − (n − k)z2
k(t − τk+1)
= (2n − 2k + 1)z2k(t) − (n − k + 1)z2
k(t − τk)
− (n − k)z2k(t − τk+1).
The left proofs of the proposition are similar to Propo-sitions B.1 and B.2 in Qian and Lin (2001), and omittedhere. �
At the end of this section, we introduce the followingproposition which will be frequently used in the controldesign.
Dow
nloa
ded
by [
Mon
ash
Uni
vers
ity L
ibra
ry]
at 0
2:04
21
Mar
ch 2
013

4 Z.-Y. Sun et al.
Proposition 2.3: For k = 2, 3, . . . , n, the following in-equality holds:
k−1∑i=1
∂WHk
∂xi
xi + z2σ−ω−rk
σ
k fk
≤k∑
i=1
z2i (t − τi) +
k−1∑i=1
z2i (t − τi+1) +
k−2∑i=1
z2i + 2
3z2k−1
+βk1z2k, (6)
where βk1 is an appropriate positive constant.
Proof: See Appendix 1. �
2.2. Control design procedure
In this section, we will construct a continuous state-feedback controller which is addressed in a step-by-stepmanner. Obviously, once the state z of the transformed sys-tems converges to zero, so does the state x of the originalsystems. Therefore, we begin the design with the trans-formed systems.
Step 1: Choose V1 = WH1 + WD1 as the candidate L-Kfunctional of this step. Then, by Proposition 2.2, we have
V1 = x
2σ−ω−r1r1
1
(x
p1
2 − αp1
1
)+ x
2σ−ω−r1r1
1 αp1
1 + x
2σ−ω−r1r1
1 f1
+ (2n − 1) z21 − nz2
1(t − τ1) − (n − 1)z21(t − τ2).
(7)
By Assumption 2.1, Lemma 2.2 and Equation (3), wededuce
x
2σ−ω−r1r1
1 f1
≤ C|x1|2σ−ω−r1
r1
(|x1|
r1+ω
r1 + |x1(t − τ1)|r1+ω
r1
)
≤(
C + 2σ − ω − r1
2σ
(ω + r1
2σ
) r1+ω
2σ−ω−r1
C2σ
2σ−ω−r1
)x
2σr1
1
+ x2σr1
1 (t − τ1)
=: β1z21 + z2
1(t − τ1). (8)
Now, choose the first virtual control α1 such that
αp1
1 (x1) = − (3n − 1 + β1) x
ω+r1r1
1 =: −gω+r1
σ
1 zω+r1
σ
1
= −gr2p1
σ
1 zr2p1
σ
1 , (9)
where g1 = (3n − 1 + β1)σ
ω+r1 is a positive constant. Sub-stituting Equations (8) and (9) into Equation (7), after somesimple calculations, we finally get
V1 ≤ −nz21 − (n − 1)
(z2
1(t − τ1) + z21(t − τ2)
)+ z
2σ−ω−r1σ
1
(x
p1
2 − αp1
1
). (10)
This completes Step 1. The first step can be viewed as theinitialisation of the whole recursive design procedure. FromStep 2, we turn to the recursive steps.
Step k(k = 2, 3, . . . , n). Suppose Vk−1 for step k − 1such that
Vk−1 ≤ −(n − k + 2)k−1∑i=1
z2i − (n − k + 1)
×(
k−1∑i=1
z2i (t − τi) +
k−1∑i=1
z2i (t − τi+1)
)
+ z2σ−ω−rk−1
σ
k−1
(x
pk−1
k − αpk−1
k−1
). (11)
Choose Vk = Vk−1 + WHk + WDk as the candidate L-Kfunctional of this step. By Proposition 2.2, we can see thatVk is continuously differentiable. Taking the time derivativeof Vk , using Proposition 2.2, and substituting Equation (11)into it, we get
Vk ≤ −(n − k + 2)k−1∑i=1
z2i − (n − k + 1)
×(
k−1∑i=1
z2i (t − τi) +
k−1∑i=1
z2i (t − τi+1)
)
+ z2σ−ω−rk−1
σ
k−1
(x
pk−1
k − αpk−1
k−1
)+ z2σ−ω−rk
σ
k
(x
pk
k+1 + fk
)+
k−1∑i=1
∂WHk
∂xi(t)xi + (2n − 2k + 1)z2
k
− (n − k + 1)z2k(t − τk) − (n − k)z2
k(t − τk+1)
= −(n − k + 2)k−1∑i=1
z2i − (n − k + 1)
×(
k∑i=1
z2i (t − τi) +
k−1∑i=1
z2i (t − τi+1)
)
+ (2n − 2k + 1)z2k − (n − k)z2
k(t − τk+1)
+ z2σ−ω−rk
σ
k
(x
pk
k+1 − αpk
k
)+ z2σ−ω−rk
σ
k αpk
k
+ z2σ−ω−rk−1
σ
k−1
(x
pk−1
k − αpk−1
k−1
)+k−1∑i=1
∂WHk
∂xi(t)xi
+ z2σ−ω−rk
σ
k fk. (12)
In this step, to get the virtual control αk , we have to findthe appropriate upper bound estimates of the last threeterms on the right-hand side of Equation (12). First, byProposition 2.3, we immediately have
k−1∑i=1
∂WHk
∂xi(t)xi + z
2σ−ω−rkσ
k fk
≤k∑
i=1
z2i (t − τi) +
k−1∑i=1
z2i (t − τi+1) +
k−2∑i=1
z2i + 2
3z2k−1
+βk1z2k. (13)
Dow
nloa
ded
by [
Mon
ash
Uni
vers
ity L
ibra
ry]
at 0
2:04
21
Mar
ch 2
013

International Journal of Control 5
Second, using σ ≥ rkpk−1, Lemmas 2.1 and 2.2, we arriveat
z2σ−ω−rk−1
σ
k−1
(x
pk−1
k − αpk−1
k−1
)≤ |zk−1|
2σ−ω−rk−1σ
∣∣∣ (xσrk
k
) rkpk−1σ
−(
ασrk
k−1
) rkpk−1σ ∣∣∣
≤ 21− rk−1+ω
σ |zk−1|2σ−ω−rk−1
σ |zk|rk−1+ω
σ
≤ 1
3z2k−1 + ω + rk−1
2σ
· 4σ
ω+rk−1−1(
3(2σ − ω − rk−1)
2σ
) 2σ−ω−rk−1ω+rk−1
z2k
=:1
3z2k−1 + βk2z
2k. (14)
Defining βk = βk1 + βk2, substituting Equations (13) and(14) into Equation (12), after some straightforward calcu-lations, we have
Vk ≤ −(n − k + 1)k−1∑i=1
z2i − (n − k)
×(
k∑i=1
z2i (t − τi) +
k∑i=1
z2i (t − τi+1)
)
+ z2k (2n − 2k + 1 + βk) + z
2σ−ω−rkσ
k
(x
pk
k+1 − αpk
k
)+ z
2σ−ω−rkσ
k αpk
k . (15)
Now, choose the virtual controller αk as
αpk
k (xk) = −(3n − 3k + 2 + βk)zrk+ω
σ
k =: −grk+ω
σ
k zrk+ω
σ
k
= −grk+1pk
σ
k zrk+1pk
σ
k , (16)
where gk = (3n − 3k + 2 + βk)σ
rk+ω is a positive constant.Substituting Equation (16) into Equation (15), we finallyget
Vk ≤ −(n − k + 1)k−1∑i=1
z2i − (n − k)
×(
k∑i=1
z2i (t − τi) +
k∑i=1
z2i (t − τi+1)
)
+ z2σ−ω−rk
σ
k
(x
pk
k+1 − αpk
k
). (17)
This completes the inductive step.When k = n, we choose the L-K functional Vn : IRn →
IR+ as
Vn(x) =n∑
i=1
(WHi + WDi), (18)
and design a continuous function αn : IRn → IR, and henceobtain the actual controller u : IRn → IR as follows:
upn (x) = −grn+ω
σn z
rn+ωσ
n . (19)
For zn+1 ≡ 0, the actual controller (19) results in
Vn ≤ −n∑
i=1
z2i . (20)
Up to now, we have finished the recursive design procedurefor the desired controller.
3. Main results
Now, we have the following theorem, which summarisesthe main results of the paper.
Theorem 3.1: For the high-order time-delay nonlinearsystem (1) under Assumption 2.1, we can design the con-tinuous state-feedback controller (19), which preserves theequilibrium at the origin, guarantees that the state x con-verges to zero.
Proof: Obviously, by the existence and the continuationproperties of solutions, one sees that the solutions of z-systems are defined on a time interval [−τ, tM ), wheretM > 0 may be a finite constant or +∞. Of course, iftM is finite, then Corollary 3.1 in Hale and Lunel (1993)implies that a specific solution z(t) of z-systems satis-fies limt→tM ‖z(t)‖ = +∞. The following studies, focusedon [−τ, tM ), characterise the common behaviour of allsolutions.
We first prove the continuity of u. For this aim, usingEquation (3), we can obtain
zn(t) = xσrnn (t) +
n−1∑i=1
⎛⎝n−1∏
j=i
gj
⎞⎠ x
σri
i (t),
by which and Equation (3) again, we can obtain the expres-sion of controller u as a function of x, that is
u(x(·)) = −grn+ωσpn
n zrn+ωσpn
n (t)
= −grn+ωσpn
n
⎛⎝x
σrnn (t) +
n−1∑i=1
⎛⎝n−1∏
j=i
gj
⎞⎠ x
σri
i (t)
⎞⎠
rn+ωσpn
.
(21)
By this and Proposition 2.1, we easily see that u is a contin-uous function of x. In addition, Equation (21) also impliesthat u preserves the equilibrium at the origin.
In the following, we will prove limt→∞ x(t) = 0. Fromthe above definitions of WHi(xi(t))’s and Propositions 2.1
Dow
nloa
ded
by [
Mon
ash
Uni
vers
ity L
ibra
ry]
at 0
2:04
21
Mar
ch 2
013

6 Z.-Y. Sun et al.
and 2.2, we easily see that∑n
i=1 WHi(·), as the functionof z, is positive definite and radially unbounded. Then, byEquation (18) and using Lemma 4.3 in Khalil (2002), weknow that there exists a K∞ function π1(·) such that
Vn(t, zt (θ )) ≥n∑
i=1
WHi(xi(t)) ≥ π1(‖z(t)‖). (22)
By Propositions 2.2 again, and noticing τ ≥ τi, i =1, . . . , n + 1, we get
Vn(t, zt (θ )) ≤n∑
i=1
21− riσ z
2σ−ωσ
i (t) +n∑
i=1
(n − i + 1)
×∫ t
t−τi
z2i (l)dl +
n∑i=1
(n − i)∫ t
t−τi+1
z2i (l)dl
≤ 2n‖z(t)‖ 2σ−ωσ +
n∑i=1
(n − i + 1)
×∫ 0
−τi
‖z(t + θ )‖2dθ +n∑
i=1
(n − i)
×∫ 0
−τi+1
‖z(t + θ )‖2dθ
≤ 2n · sup−τ≤θ≤0
‖z(t + θ )‖ 2σ−ωσ
+n∑
i=1
(n − i + 1)τi · sup−τi≤θ≤0
‖z(t + θ )‖2
+n∑
i=1
(n − i)τi+1 · sup−τi+1≤θ≤0
‖z(t + θ )‖2
≤ 2n · sup−τ≤θ≤0
‖z(t + θ )‖ 2σ−ωσ
+n∑
i=1
((n − i + 1)τi + (n − i)τi+1)
· sup−τ≤θ≤0
‖z(t + θ )‖2
≤ 2n
(sup
−τ≤θ≤0‖z(t + θ )‖
) 2σ−ωσ
+n∑
i=1
((n − i + 1)τi + (n − i)τi+1)
×(
sup−τ≤θ≤0
‖z(t + θ )‖)2
=: π2(‖zt‖C), (23)
where π2(·) is a K∞ function. Equations (22) and (23) showthat the L-K functional Vn satisfies the inequality:
π1(‖z(t)‖) ≤ Vn(t, zt (θ )) ≤ π2(‖zt‖C). (24)
In addition, Equation (20) can be rewritten as
Vn(t, zt (θ )) ≤ −‖z(t)‖2 =: π3(‖z(t)‖), (25)
where π3(·) is a K∞ function. From Equations (24) and(25), we immediately get tM = +∞, Therefore, all solu-tions z(t) of z-systems are well-defined on [−τ, +∞), soare x(t). Then by Equations (24), (25) and L-K stabilitytheorem (see Hale & Lunel, 1993; Gu et al., 2003), we have
limt→∞ z(t) = 0. Because of x1(t) = z1σ
1 (t), it is obviousto get limt→∞ x1(t) = 0. Suppose limt→∞ xi−1(t) = 0, i =2, 3, . . . , n, we need to prove limt→∞ xi(t) = 0. In fact, inview of the definitions of αk, k = 1, . . . , n and the conver-gence of zi(t), it is straightforward to get limt→∞ xi(t) = 0,so is the vector xi(t). Then, by induction, we finally obtainthat the state x(t) converges to zero. �
The aforementioned design scheme can also be ex-tended to investigate a wider class of high-order uncertainnonlinear systems with multiple time-varying delays:
⎧⎪⎪⎨⎪⎪⎩
xi(t) = xpi
i+1(t) + fi(xi(t), x1(t − τ1(t)), . . . ,
xi(t − τi(t))), i = 1, . . . , n − 1,
xn(t) = upn (t) + fn(x(t), x1(t − τ1(t)), . . . ,
xn(t − τn(t))),
(26)
where τi(·), i = 1, . . . , n are time-varying delays satisfy-ing 0 ≤ τi(t) ≤ εi , τi(t) ≤ σi < 1 for constants εi and σi .Suppose that Assumption 2.1 still holds, except for τj beingreplaced by τj (t). By making some slight modifications forthe design procedure in Section 2.2, we can construct thecontinuous state-feedback controller applicable to system(26), and thus obtain the following concluding theorem.
Theorem 3.2: For the high-order time-delay nonlinearsystem (26), suppose that Assumption 2.1 still holds, exceptfor τj being replaced by τj (t), there exists a continuousstate-feedback controller (19), which preserves the equilib-rium at the origin, guarantees that the state x converges tozero.
Proof: Taking the same manipulations as that of Sec-tion 2.2, we can choose
Vn(t, zt (θ )) =n∑
i=1
Wi(xi(t)) +n∑
i=1
n − i + 1
1 − σi
∫ t
t−τi (t)z2i (l)dl
+n∑
i=1
n − i
1 − σi+1
∫ t
t−τi+1(t)z2i (l)dl,
and finally obtain the actual continuous controller (21),which renders that the time derivative of Vn(·) satisfiesVn(t, zt (θ )) ≤ −∑n
i=1 z2i (t). Noticing 0 ≤ τi(t) ≤ εi and
Dow
nloa
ded
by [
Mon
ash
Uni
vers
ity L
ibra
ry]
at 0
2:04
21
Mar
ch 2
013

International Journal of Control 7
ε = max{ε1, . . . , εn}, we have
Vn(t, zt (θ )) ≤n∑
i=1
Wi(xi(t)) +n∑
i=1
n − i + 1
1 − σi
∫ t
t−εi
z2i (l)dl
+n∑
i=1
n − i
1 − σi+1
∫ t
t−εi+1
z2i (l)dl.
The left proof is the same as that of Theorem 3.1. �
Remark 3.1: We should emphasise that the actual con-troller which is only continuous (see Theorems 3.1 and 3.2)is prior to the smooth one, this can be shown from the con-trol design for a class of under-actuated, weakly coupledand unstable mechanical systems (Qian & Lin, 2001).
Remark 3.2: The derivative of the L-K functional alongthe solutions of the resulting closed-loop systems must benegative definite and could eliminate the effect of the time-delay terms, in this paper, an appropriate L-K functional issuccessfully constructed to obtain a continuous stabilisingcontroller under the weaker assumptions.
4. Simulations
Consider the following high-order time-delay nonlinearsystem:
⎧⎪⎪⎨⎪⎪⎩
x1(t) = x53
2 (t) + x53
1 (t − 1) + x53
1 (t) sin(x1(t − 1)),
x2(t) = u3(t) − x53
2 (t) sin(x2(t − 1)) − x53
2 (t − 2)× cos(2x1(t)).
(27)
It is easy to verify that Assumption 2.1 holds with p1 = 53 ,
p2 = 3, τ1 = 1, τ2 = 2, C = 1, r1 = r2 = 1, r3 = 59 ,
σ = 259 , w = 2
3 . Choosing V1 = WH1 + WD1, and usingProposition 2.2, we have
V1 = x359
1
(x
53
2 − α531
)+ x
359
1 α531 + x
359
1 f1 + 3z21
− 2z21(t − 1) − z2
1(t − 2). (28)
By Assumption 2.1, Lemma 2.2 and Equation (3), wededuce
x359
1 f1 ≤ |x1| 359
(|x1| 5
3 + |x1(t − 1)| 53
)≤ 1.42x
509
1 + x509
1 (t − 1) = 1.42z21 + z2
1(t − 1).
(29)
Choose the first virtual control α1 such that
αp1
1 (x1) = − (5 + 1.42) x53
1 =: −g351 z
351 , (30)
where g1 = (5 + 1.42)53 = 22.18. Substituting Equat-
ions (29) and (30) into Equation (28), after some simplecalculations, we finally get
V1 ≤ −2z21 − (
z21(t − 1) + z2
1(t − 2))+ z
751
(x
53
2 − α531
).
(31)
In the following, choose V2 = V1 + WH2 + WD2. Takingthe time derivative of V2, and substituting Equation (31)into it, we get
V2 ≤ −2z21 − (
z21(t − 1) + z2
1(t − 2))+ z
751
(x
53
2 − α531
)+ z
752 u3 + z
752 f2 + ∂WH2
∂x1x1 + z2
2 − z22(t − 2)
= −2z21 − (
z21(t − 1) + z2
1(t − 2) + z22(t − 2)
)+ z22
+ z752 u3 + z
751
(x
53
2 − α531
)+ z
752 f2 + ∂WH2
∂x1x1. (32)
To get the actual controller u, we have to find the appropriateupper bound estimates of the last three terms on the right-hand side of Equation (32). First, by Lemmas 2.1 and 2.2,we arrive at
z751
(x
53
2 − α531
)≤ |z1| 7
5
∣∣∣ (x 259
2
) 35 −
(α
259
1
) 35∣∣∣
≤ 21− 35 |z1| 7
5 |z2| 35 =:
1
3z2
1 + 4.3z22.
(33)
Second, by Proposition 2.3, we have
∂WH2
∂x1x1 + z
752 f2 ≤ z2
1(t − 1) + z21(t − 2) + z2
2(t − 2)
+ 2
3z2
1 + 2.0124 × 107z22. (34)
Substituting Equations (33) and (34) into Equation (32),after some straightforward calculations, we have
V2 ≤ −z21 + z
752 u3 + 2.0124 × 107z2
2.
Now, we can choose u
u(x) = −272(x
259
2 + 17.95x259
1
) 15
, (35)
which renders V2 ≤ −z21 − z2
2.By Theorem 3.1, we know that x1 and x2 will converge
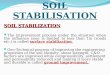
to zero. To see this point, in simulation, we set the initialconditions as x1(θ ) ≡ 0.5, x2(θ ) ≡ −1.5, ∀θ ∈ [−2, 0].Figure 1 shows that the designed controller (35) indeed
Dow
nloa
ded
by [
Mon
ash
Uni
vers
ity L
ibra
ry]
at 0
2:04
21
Mar
ch 2
013

8 Z.-Y. Sun et al.
Figure 1. The trajectories of x1 and x2.
guarantees the asymptotic stability of the resulting closed-loop system. The simulation demonstrates that the high-order time-delay nonlinear system can be stabilised with asatisfactory response by the state-feedback controller.
5. Concluding remarks
This paper has solved the problem of state-feedback stabil-isation for a class of high-order nonlinear systems withmultiple time delays. The designed controller preservesthe equilibrium at the origin, and guarantees the globallyasymptotic stability of the resulting closed-loop system. Inthis direction, there are still remaining problems to be in-vestigated. For example, an interesting research problem ishow to design an output-feedback stabilisation controller.
AcknowledgementsThis work supported by the National Natural Science Founda-tion of China (61004013, 61273125, 61203013), the ShandongProvincial Natural Science Foundation of China (ZR2010FQ003,ZR2012FM018), the Specialised Research Fund for theDoctoral Program of Higher Education (20103705110002,20113705120003), the Outstanding Middle-Age and Young Sci-entist Award Foundation of Shandong Province (BS2011DX012),the Project of Taishan Scholar of Shandong Province and the
Doctoral Scientific Research Start-Up Foundation of Qufu Nor-mal University.
ReferencesDaniel, W., Li, J. M., & Niu, Y. G. (2005). Adaptive neural control
for a class of nonlinearly parametric time-delay systems. IEEETransactions on Neural Networks, 16, 625–635.
Ge, S. S., Hong, F., & Lee, T. H. (2003). Adaptive neural networkcontrol of nonlinear systems with unknown time delays. IEEETransactions on Automatic Control, 48, 2004–2010.
Gu, K. Q., Kharitonov, V. L., & Chen, J. (2003). Stability of time-delay systems. Berlin: Birkhauser.
Hale, J. K., & Lunel, S. M. V. (1993). Introduction to functionaldifferential equations. New York: Springer-Verlag.
Hua, C. C., Feng, G., & Guan, X. P. (2008). Robust controllerdesign of a class of nonlinear time delay systems via back-stepping method. Autmoatica, 44, 567–573.
Hua, C. C., Guan, X. P., & Shi, P. (2005). Robust backsteppingcontrol for a class of time delayed systems. IEEE Transactionson Automatic Control, 50, 894–899.
Isidori, A. (1995). Nonlinear control systems. London: Springer-Verlag.
Ito, H., Pepe, P. & Jiang, Z. P. (2010). A small-gain condi-tion for iISS of interconnected retarded systems based onLyapunov–Krasovskii functionals. Automatica, 46, 1646–1656.
Jiao, X. H. & Shen, T. L. (2005). Adaptive control of non-linear time-delay systems: The LaSalle–Razumikhin-basedapproach. IEEE Transactions on Automatic Control, 50,1909–1913.
Dow
nloa
ded
by [
Mon
ash
Uni
vers
ity L
ibra
ry]
at 0
2:04
21
Mar
ch 2
013

International Journal of Control 9
Jiao, X. H., Shen, T. L. & Sun, Y. Z. (2007). Further result on robuststabilization for uncertain nonlinear time-delay systems. ActaAutomatica Sinica, 33, 164–169.
Khalil, H. K. (2002). Nonlinear systems. New Jersey: PrenticeHall.
Krstic, M. (2010). Input delay compensation for forward completeand feedforward nonlinear systems. IEEE Transactions onAutomatic Control, 55, 287–303.
Krstic, M., Kanellakopoulos, I., & Kokotovic, P. V. (1995). Non-linear and adaptive control design. New York: John Wileyand Sons.
Lin, W., & Pongvuthithum, R. (2003a). Adaptive output trackingof inherently nonlinear systems with nonlinear parameteri-zation. IEEE Transactions on Automatic Control, 48, 1737–1749.
Lin, W., & Pongvuthithum, R. (2003b). Nonsmooth adaptive stabi-lization of cascade systems with nonlinear parameterizationvia partial-state feedback. IEEE Transactions on AutomaticControl, 48, 1809–1816.
Lin, W. & Qian, C. J. (2002). Adaptive control of nonlinear pa-rameterized systems: The smooth feedback case. IEEE Trans-actions on Automatic Control, 47, 1249–1266.
Mazenc, F., & Bliman, P. A. (2006). Backstepping design for time-delay nonlinear systems. IEEE Transactions on AutomaticControl, 51, 149–154.
Mazenc, F., Malisoff, M., & Lin, Z. L. (2008). Further resultson input-to-state stability for nonlinear systems with delayedfeedbacks. Autmoatica, 44, 2415–2421.
Pepe, P., & Jiang, Z. P. (2006). A Lyapunov–Krasovskii method-ology for ISS and iISS of time-delay systems. Systems andControl Letters, 55, 1006–1014.
Polendo, J., & Qian, C. J. (2007). A generalized homogeneousdomination approach for global stabilization of inherentlynonlinear systems via output feedback. International Journalof Robust and Nonlinear Control, 17, 605–629.
Qian, C. J., & Lin, W. (2001). A continuous feedback approach toglobal strong stabilization of nonlinear systems. IEEE Trans-actions on Automatic Control, 46, 1061–1079.
Qian, C. J. & Lin, W. (2002). Practical output trackingof nonlinear systems with uncontrollable unstable lin-earization. IEEE Transactions on Automatic Control, 47,21–36.
Richard, J. P. (2003). Time-delay systems: An overview of somerecent advances and open problems. Automatica, 39, 1667–1694.
Sun, Z. Y., & Liu, Y. G. (2007). Adaptive state-feedback stabi-lization for a class of high-order nonlinear uncertain systems.Automatica, 43, 1772–1783.
Sun, Z. Y., & Liu, Y. G. (2008). Adaptive practical output track-ing control for high-order nonlinear uncertain systems. ActaAutomatica Sinica, 34, 984–988.
Sun, Z. Y., & Liu, Y. G. (2009). Adaptive stabilization for a largeclass of high-order uncertain nonlinear systems. InternationalJournal of Control, 82, 1275–1287.
Sun, Z. Y., Liu, Y. G., & Xie, X. J. (2011). Global stabilizationfor a class of high-order time-delay nonlinear systems. Inter-national Journal of Innovative Computing, Information andControl, 7, 7119–7130.
Wu, Z. J., Xie, X. J., & Zhang, S. Y. (2007). Adaptive backstep-ping controller design using stochastic small-gain theorem.Automatica, 43, 608–620.
Yan, X. H., & Liu, Y. G. (2010). Global practical tracking forhigh-order uncertain nonlinear systems with unknown controldirections. SIAM Journal on Control and Optimization, 48,4453–4473.
Zhang, X. F., Boukas, E. K., Liu, Y. G., & Baron, L. (2010).Asymptotic stabilization of high order feedforward systemswith delays in the input. International Journal of Robust andNonlinear Control, 20, 1395–1406.
Zhang, X. F., Liu, Q. R., Baron, L., & Boukas, E. K. (2011).Feedback stabilization for high order feedforward nonlineartime-delay systems. Automatica, 47, 962–967.
Zhong, Q. C. (2006). Robust control of time-delay systems.London: Springer-Verlag.
Appendix 1Proof of Proposition 2.3: According to Proposition 2.1 and Equa-tion (3), we have
ασri
i−1 =(−g
riσ
i−1zriσ
i−1
) σri = (−1)
σri gi−1zi−1
= −gi−1zi−1, i = 1, . . . , k.
Furthermore, we inductively deduce
ασrk
k−1 = −gk−1zk−1 = −k−1∑i=1
⎛⎝k−1∏
j=i
gj
⎞⎠ x
σri
i ,
this and σ
ri≥ 1 (see Proposition 2.1) imply that the following
relationship holds:
∂ασrk
k−1
∂xi
= −σ
ri
k−1∏j=i
gj · xσri
−1
i = −σ
ri
k−1∏j=i
gj ·(
xσri
i
) σ−riσ
,
i = 1, . . . , k − 1. (36)
On the other hand, by |xk − αk−1| ≤ |(xσrk
k )rkσ − (α
σrk
k−1)rkσ | ≤
21− rkσ |zk|
rkσ and Lemma 2.3, we have
∫ xk
αk−1
(s
σrk − α
σrk
k−1
) σ−ω−rkσ
ds ≤ |zk|σ−ω−rk
σ · |xk − αk−1|
≤ 21− rkσ |zk| σ−ω
σ . (37)
In view of Equations (36), (37), Proposition 2.1 and Lemma 2.1,we obtain
∂WHk
∂xi
= −2σ − ω − rk
σ
∫ xk
αk−1
(s
σrk − α
σrk
k−1
) σ−ω−rkσ
ds · ∂ασrk
k−1
∂xi
≤ (2σ − ω − rk)21− rkσ
ri
k−1∏j=i
gj · |zk| σ−ωσ ·
∣∣∣x σri
i
∣∣∣ σ−riσ
= (2σ − ω − rk)21− rkσ
ri
k−1∏j=i
gj · |zk| σ−ωσ · |zi−gi−1zi−1|
σ−riσ
≤ (2σ − ω − rk)21− rkσ
ri
k−1∏j=i
gj · max{
1, gσ−ri
σ
i−1
}
· |zk| σ−ωσ
(|zi |
σ−riσ + |zi−1|
σ−riσ
)=: Di |zk| σ−ω
σ
(|zi |
σ−riσ + |zi−1|
σ−riσ
). (38)
Dow
nloa
ded
by [
Mon
ash
Uni
vers
ity L
ibra
ry]
at 0
2:04
21
Mar
ch 2
013

10 Z.-Y. Sun et al.
Using Assumption 2.1, Equation (3), Lemma 2.1 and Propo-sition 2.1, we get
fi ≤ C
i∑j=1
(|xj |
ri+ω
rj + |xj (t − τj )|ri+ω
rj
)
= C
i∑j=1
(∣∣∣x σrj
j
∣∣∣ ri+ω
σ +∣∣∣x σ
rj
j (t − τj )∣∣∣ ri+ω
σ
)
= C
i∑j=1
(|zj − gj−1zj−1|
ri+ω
σ + |zj (t − τj )
− gj−1zj−1(t − τj )| ri+ω
σ
)
≤ (Ci + C)i∑
j=1
|zj |ri+ω
σ + C
i∑j=1
|zj (t − τj )| ri+ω
σ
+ Ci
i−1∑j=1
|zj (t − τj+1)| ri+ω
σ , (39)
where Ci = C · max1≤j≤i−1{gri+ω
σ
j }. From Equations (38) and(39), we have
∂WHk
∂xi
xi = ∂WHk
∂xi
(x
pi
i+1 + fi
)
= ∂WHk
∂xi
((x
σri
i+1
) ri+1piσ
+ fi
)
≤ Di |zk| σ−ωσ
(|zi |
σ−riσ + |zi−1|
σ−riσ
)×(|zi+1|
ri+1piσ + g
ri+1piσ
i |zi |ri+1pi
σ + |fi |)
= Di |zk| σ−ωσ
(|zi |
σ−riσ + |zi−1|
σ−riσ
)
×(
|zi+1|ri+ω
σ + gri+ω
σ
i |zi |ri+ω
σ + |fi |)
. (40)
In the following, we further manipulate the term ‘ ∂WHk
∂xixi’ to get
its appropriate upper bound estimate. By Lemma 2, we deduce
|zi |σ−ri
σ
(|zi+1|
ri+ω
σ + gri+ω
σ
i |zi |ri+ω
σ + |fi |)
≤ |zi |σ−ri
σ
⎛⎝(Ci + C)
i∑j=1
|zj |ri+ω
σ
+ C
i∑j=1
|zj (t − τj )| ri+ω
σ + Ci
i−1∑j=1
|zj (t − τj+1)| ri+ω
σ
⎞⎠
+ |zi |σ−ri
σ
(|zi+1|
ri+ω
σ + gri+ω
σ
i |zi |ri+ω
σ
)
≤(
(σ − ri)((2i − 1)C + (2i − 2)Ci + 1)
σ + ω+ Ci + C
+ gri+ω
σ
i
)|zi | σ+ω
σ + ri + ω
σ + ω|zi+1| σ+ω
σ
+ (Ci + C)(ri + ω)
σ + ω
i−1∑j=1
|zj | σ+ωσ + C(ri + ω)
σ + ω
×i∑
j=1
|zj (t − τj )| σ+ωσ + Ci(ri + ω)
σ + ω
i−1∑j=1
|zj (t − τj+1)| σ+ωσ
=: mi1|zi | σ+ωσ + mi2|zi+1| σ+ω
σ + mi3
i−1∑j=1
|zj | σ+ωσ
+ mi4
i∑j=1
|zj (t − τj )| σ+ωσ
+ mi5
i−1∑j=1
|zj (t − τj+1)| σ+ωσ . (41)
Similarly, we arrive at the following estimate:
|zi−1|σ−ri
σ
(|zi+1|
ri+ω
σ + gri+ω
σ
i |zi |ri+ω
σ + |fi |)
≤ |zi−1|σ−ri
σ
⎛⎝(Ci + C)
i∑j=1
|zj |ri+ω
σ + C
i∑j=1
|zj (t − τj )| ri+ω
σ
+ Ci
i−1∑j=1
|zj (t − τj+1)| ri+ω
σ
⎞⎠
+ |zi−1|σ−ri
σ
(|zi+1|
ri+ω
σ + gri+ω
σ
i |zi |ri+ω
σ
)
≤ C(ri + ω)
σ + ω
i∑j=1
|zj (t − τj )| σ+ωσ + Ci(ri + ω)
σ + ω
×i−1∑j=1
|zj (t − τj+1)| σ+ωσ + (Ci + C)(ri + ω)
σ + ω
i−2∑j=1
|zj | σ+ωσ
+(
(σ − ri)(
(2i − 1)C + (2i − 2)Ci + 1 + gri+ω
σ
i
)σ + ω
+ Ci + C
)|zi−1| σ+ω
σ +(
gri+ω
σ
i + Ci + C
)|zi | σ+ω
σ
+ ri + ω
σ + ω|zi+1| σ+ω
σ
=: mi4
i∑j=1
|zj (t − τj )| σ+ωσ + mi5
i−1∑j=1
|zj (t − τj+1)| σ+ωσ
+ mi3
i−2∑j=1
|zj | σ+ωσ + mi6|zi−1| σ+ω
σ
+ mi7|zi | σ+ωσ + mi2|zi+1| σ+ω
σ . (42)
Combining Equations (41) and (42), we get
(|zi |
σ−riσ + |zi−1|
σ−riσ
)(|zi+1|
ri+ω
σ + gri+ω
σ
i |zi |ri+ω
σ + |fi |)
≤ 2mi4
i∑j=1
|zj (t − τj )| σ+ωσ + 2mi5
i−1∑j=1
|zj (t − τj+1)| σ+ωσ
Dow
nloa
ded
by [
Mon
ash
Uni
vers
ity L
ibra
ry]
at 0
2:04
21
Mar
ch 2
013

International Journal of Control 11
+ mi3
i−2∑j=1
|zj | σ+ωσ + (mi3 + mi6)|zi−1| σ+ω
σ
+ (mi1 + mi7)|zi | σ+ωσ + 2mi2|zi+1| σ+ω
σ . (43)
Then, according to Equations (40), (43) and Lemma 2.2, wehave
∂WHk
∂xi
xi ≤ Di |zk| σ−ωσ
(|zi |
σ−riσ + |zi−1|
σ−riσ
)×(|zi+1|
ri+ω
σ + gri+ω
σ
i |zi |ri+ω
σ + |fi |)
≤ Di |zk| σ−ωσ
⎛⎝2mi4
i∑j=1
|zj (t − τj )| σ+ωσ
+ 2mi5
i−1∑j=1
|zj (t − τj+1)| σ+ωσ + mi3
i−2∑j=1
|zj | σ+ωσ
+ (mi3 + mi6)|zi−1| σ+ωσ + (mi1 + mi7)|zi | σ+ω
σ
+ 2mi2|zi+1| σ+ωσ
⎞⎠
≤ σ − ω
2σD
2σσ−ω
i
(σ + ω
σ
) σ+ωσ−ω
⎛⎝(2mi4)
2σσ−ω
×i∑
j=1
(k − j )σ+ωσ−ω + (2mi5)
2σσ−ω
i−1∑j=1
(k − j − 1)σ+ωσ−ω
+ (mi3)2σ
σ−ω (k − 1)σ+ωσ−ω + (k − i + 2)
σ+ωσ−ω
×(
(mi3+mi6 )2σ
σ−ω + (mi1+mi7)2σ
σ−ω + (2mi2)2σ
σ−ω
)⎞⎠z2k
+i∑
j=1
z2j (t − τj )
2(k − j )+
i−1∑j=1
z2j (t − τj+1)
2(k − j − 1)+ z2
1
2(k − 1)
+i+1∑j=2
z2j
2(k − j + 1)
=: mi8z2k +
i∑j=1
z2j (t − τj )
2(k − j )+
i−1∑j=1
z2j (t − τj+1)
2(k − j − 1)
+ z21
2(k − 1)+
i+1∑j=2
z2j
2(k − j + 1).
Therefore, we finally obtaink−1∑i=1
∂WHk
∂xi
xi ≤(
1
2+
k−1∑i=1
mi8
)z2
k + 1
2
k−1∑i=1
z2i + 1
2
k−1∑i=1
z2i (t − τi)
+ 1
2
k−2∑i=1
z2i (t − τi+1)
=: nk1z2k + 1
2
k−1∑i=1
z2i + 1
2
k−1∑i=1
z2i (t − τi)
+ 1
2
k−2∑i=1
z2i (t − τi+1). (44)
In addition, using Equation (39) and Lemma 2.2, we have
z2σ−ω−rk
σ
k fk
≤ |zk|2σ−ω−rk
σ
⎛⎝(Ck + C)
k∑i=1
|zi |rk+ω
σ + C
k∑i=1
|zi(t − τi)|rk+ω
σ
+ Ck
k−1∑i=1
|zi(t − τi+1)| rk+ω
σ
⎞⎠
≤(
Ck + C + 2σ − ω − rk
2σ
((k − 2)
(rk + ω
σ
) rk+ω
2σ−ω−rk
× (Ck + C)2σ
2σ−ω−rk +(
3rk + 3ω
σ
) rk+ω
2σ−ω−rk
(Ck + C)2σ
2σ−ω−rk
+ (k − 1)
(rk + ω
σ
) rk+ω
2σ−ω−rk
C2σ
2σ−ω−rk +(
rk + ω
2σ
) rk+ω
2σ−ω−rk
× C2σ
2σ−ω−rk + (k − 2)
(rk + ω
σ
) rk+ω
2σ−ω−rk
C2σ
2σ−ω−rk
k
+(
rk + ω
2σ
) rk+ω
2σ−ω−rk
C2σ
2σ−ω−rk
k
))z2
k + 1
2
k−2∑i=1
z2i + 1
6z2
k−1
+ 1
2
k−1∑i=1
z2i (t − τi) + z2
k(t − τk) + 1
2
k−2∑i=1
z2i (t − τi+1)
+ z2k−1(t − τk)
=: nk2z2k +
k−2∑i=1
z2i
2+ z2
k−1
6+
k−1∑i=1
z2i (t − τi)
2+ z2
k(t − τk)
+k−2∑i=1
z2i (t − τi+1)
2+ z2
k−1(t − τk). (45)
Defining βk1 = nk1 + nk2, and combining Equations (44) and (45),we complete the proof. �
Dow
nloa
ded
by [
Mon
ash
Uni
vers
ity L
ibra
ry]
at 0
2:04
21
Mar
ch 2
013

![Stream Quality Control via a Constrained Nonlinear Time ... · in [11,12] is extended to deal with nonlinear optimization problems with time delays and system constraints. Then, an](https://img.pdfslide.net/doc/110x75/5f0a9fff7e708231d42c8ce2/stream-quality-control-via-a-constrained-nonlinear-time-in-1112-is-extended.jpg)