Embed Size (px)
Citation preview
Haptic Navigation in Mobile Context
Hanna Venesvirta
University of Tampere
Department of Computer Sciences
Interactive Technology
Seminar “Haptic Communication in
Mobile Contexts”
October 2008

i
University of Tampere
Department of Computer Sciences
Interactive Technology
Hanna Venesvirta: Haptic Navigation in Mobile Context
Seminar paper, 16 pages, 5 indexes
December 2008
Haptic communication is intuitive and easy to learn, and it
provides a new and unique interaction method for all users and
especially for blind and visually impaired users. There are
several haptic navigation devices. When designing and
implementing these products and prototypes, the projects have
been especially interested in visually impaired users and users in
special situations, such as pilots, firemen and military persons
are. Furthermore, these devices provide some extra for all users.
Key words and terms: Haptic Communication, Haptic Navigation, Haptic I/O, Mobile
or Wearable Devices
ii
Table of Contents
1. Introduction ............................................................................................................... 1
2. Haptic navigation: what, where, why and why not? ................................................. 1
2.1. What is haptic navigation and where it can be used ........................................ 1
2.2. Advantages of haptic navigation ...................................................................... 2
2.3. Challenges of haptic navigation ....................................................................... 3
3. Technologies used in haptic navigation .................................................................... 4
4. Haptic navigation: examples ..................................................................................... 5
4.1. MOMO: A haptic navigation device ................................................................ 5
4.2. Lead-Me Interface for a Pulling Sensation from hand-held Devices............... 7
4.3. CabBoots – Shoes with integrated Guidance System ...................................... 8
4.4. Vibro-Vest A Wireless Haptic Navigation Device ........................................ 10
4.5. ActiveBelt ...................................................................................................... 11
4.6. Technojewerly ................................................................................................ 13
5. Conclusion ............................................................................................................... 14
References ..................................................................................................................... 15
1
1. Introduction
Haptic interaction between the user and the interface or the device has many
advantages. Researchers have found many opportunities on haptic navigation, even as a
main modality of the communication between the user and the device. That is because
haptics have been found to be intuitive and natural way of communication.
Haptics support users’ cognitive attentiveness and perception without disturbing
other modalities. Especially it has thought to be really powerful communication method
for visually impaired people, but as well for situations, where other modalities are
taken.
Haptic navigation is a navigation method, which uses sense of touch as an input or
output channel. The device can interact with the user by vibrating, leaning to the desired
direction, pulling or pushing the user, among others.
Here, I will introduce haptic navigation in mobile context. Section 2 will lead the
reader in to the subject: what is haptic navigation. On section 3, I will discuss what
interaction methods and technologies have been used with haptic navigation, and
furthermore, I will introduce few examples of haptic navigation on section 4. Finally, I
will conclude on section 5.
2. Haptic navigation: what, where, why and why not?
In this section, I will discuss several things: What is haptic navigation; Where it can be
used; What are the advantages of haptic navigation compared other navigational
methods, and; What are the challenges of haptic navigation.
2.1. What is haptic navigation and where it can be used
Word navigation can be understood in several ways: when referring to navigation, it
can mean that some (motor) vehicle, like a car, an aeroplane, or a ship is driven. Then
again, navigation means browsing in the World Wide Web or some (graphical)
interface. In some cases, the word navigation is used to describe a situation, when
someone is guides or controls someone else, or a machine. [OED]
In haptic navigation, user has a device, which leads them to the desired location by
using feedback based on the sense of touch. Feedback can be given via vibrating
(several haptic mice use vibration; see also [IDEO; Erp et al., 2001; Hamm; Wang and
O’Friel]), pulses, by pushing and pulling [Amemiya et al., 2008], or by leaning to the
needed direction [Frey, 2007; Wang and O’Friel]. Sometimes the device can use several
haptic feedbacks at the same time [Wang and O’Friel], or a combination of different
modalities [IDEO]. In general, the haptic communication is one-sided: the device gives
output, but the user does not communicate with the device, not at least with haptic
interaction. Then again, it can be argued whether or not users’ responses (e.g. changing

2
movement) to the information given are communication with the device. At least, it is
not that active.
One can use haptic navigation in a virtual environment, browsing graphical
interface, or moving in the real world. One can find some techniques produced for
haptic navigation in graphical interface: for instance, it is possible to make large
amounts of data more understandable by using haptics and haptic navigation, like
information visualization does. This is useful for example for visually impaired users,
as they are able to access information usually described in visual or graphical means.
Also, this might mean that browsing is faster and easier, as navigation is not based on
reading or using screen readers. (More about haptic navigation in graphical interfaces
see e.g. [Wall and Brewster, 2006].)
Moving in a virtual environment (VE) by means of haptic navigation is very much
the same thing as moving in real world; the user is searching a route and explores the
VE. This means, they might require help to find their way or to control their route.
(More about using haptic navigation in VEs see e.g. [Erp, 2001] or [Nemec et al.,
2004].)
Several haptic navigational devices for navigating in real world have been
developed. Some of the devices have been made for visually impaired (e.g. [Amemiya
et al., 2008; Amemiya and Sugiyama, 2008]), for special situations, where visual and
auditory channels are taken, like when driving a car, navigating a ship, or flying [e.g.
Erp et al., 2005], as well as various common use, in various situation for various people
[e.g. MOMO; IDEO; Frey, 2007].
From the viewpoint of mobile haptic navigation, it is reasoned to concentrate on the
latter. Clearly it seems that haptic navigation is needed and has potential in real world
environments. This is why I have decided, that I will curtail my later discussion on this
particular subject.
2.2. Advantages of haptic navigation
Haptic communication between the device and the user has been noted to be effective,
since haptic modality can provide very intuitive interaction [Amemiya et al., 2008] –
after all, communication based on touch is the very first way of communication. When
communicating with the navigational devices it is important that communication
between the device and the user continues to be intuitive and comfortable. For example,
the designers of CabBoots [Frey, 2007] and Lead-Me interface [Amemiya et al., 2008]
regard that their products are intuitive and easy to learn, as interaction in both products
is based metaphors from real life.
Haptic information is non-verbal and cognitively less distracting than information
from other channels [Amemiya et al., 2008]. When cognitive activity has been
oppressed heavily, like when travelling in unfamiliar surroundings, it is very important
3
to get information without disturbing or limiting important modalities, like seeing or
hearing. As haptic communication is non-verbal and non-visual, attentiveness is not
disturbed, but more information channels can be used. In addition, the visually impaired
users are often mentioned to benefit haptic communication, since they prefer devices
which do not narrow down their last communication channel, hearing. This is really
important benefit, as people who’s seeing is lacking it is very important that they have
their possibility to communicate with other people, and also, be aware their
environment, because of their own safety. Also, it has been discovered that haptic
channel supports long-term location memory [Amemiya et al., 2008; Chapman et al.,
2001].
Haptic navigation devices can be learnt to use fast, even after short practise.
Likewise it has discovered that haptic device can be used for navigation both in
ordinary situations, and in operational environments, like flying a helicopter. [Erp et al.,
2005]
Employing mobile devices for navigation makes the usage of navigational device
easier, as these devices have been produce for situations, when navigation is often
needed: on the road. However, both mobile and haptic elements give challenges for
navigation. In next section some of the challenges will be discussed.
2.3. Challenges of haptic navigation
In general, the way people use cognitive mappings is a great challenge for navigation
devices [Bradley and Dunlop, 2005]. People tend to use cognitive mappings based what
they are looking and what interests them. It has speculated that (1) time of day (night,
day), (2) season, and (3) direction all have an influence how people build cognitive
mappings [Jonsson, 2002]. Because people have different cognitive mappings, it is
challenging to take these into account when designing navigation devices. Also, there
has been very little research about how visually impaired people use cognitive mapping
[Bradley and Dunlop, 2005]. Since potential users for haptic navigation, it would be
important to study this.
Using only haptics in navigation devices brings two communication problems: it is
very difficult to code direction and above all, distance when using haptic feedback [Erp
et al., 2005]. Coding direction is notably easier – though there were only two directions
coded, it has been noted that navigation can be successful [e.g. Bosman et al., 2003]. Of
course, if there are more sensors, understanding directional changes is easier [Erp et al.,
2005].
Coding distance is challenging regardless of how the device is connected to the
user. Then again, when walking, it is not always important to know how big the
distance is – users concern themselves more the direction. Yet, according Erp et al.
[2005], users were pleased if distance and above all, reaching the destination is coded.

4
The problem when coding distance on a haptic navigation device is that people have no
baseline to tell them where exactly the destination is – all they can say, that they are
approaching. Only after long period of using some device people may learn to calculate
distance. It is also possible, that the problem will not ever be solved, and in most cases,
designers have not even tried to implement any coding for it.
Mobility as such brings some challenges for haptic navigation: putting together
mobile device and kinaesthetic interaction. According Amemiya et al. [2008], most of
the interfaces used in mobile devices these days are not suitable for mobile devices.
Mobile devices are often compact, so any massive technologies cannot be used. Also, as
being small-sized devices held usually in one hand, it is challenging to implement
technologies which indicate direction – for instance, vibrating is not that informative
when used with for example mobile phone. Amemiya et al. have their own suggestion
to solve this problem; more of it will be discussed below, on section 4.2.
Finally, there might be existing problem, which was ignored in literature: nearly all
products I found require that user have to either wear them or carry them in their hand.
All wearable devices, like belts and vests, appear to be uncomfortable and not for
everyday use. Then again, hand-held devices require that user carry them, so they limit
users’ activities. GPS Toes (introduced on section 4.6) designed by IDEO [IDEO] were
closest of device, which is cosy and unnoticeable.
3. Technologies used in haptic navigation
In haptic navigation, both tactile and force feedback can be used. It seems that mostly
the tactile feedback, such as vibration, is used nowadays, but according Amemiya et al.
[2008], especially in hand-held devices, such as in mobile phones, force feedback could
be more understandable, effective and intuitive.
As mentioned above, several haptic navigation devices use tactile feedback, usually
vibration. In this paper, I will later introduce following examples that use vibration (and
possible, other interaction methods) to communicate with the user): GPS Toes by IDEO
[IDEO], Vibro-Vest [Hamm], ActiveBelt [Tsukada and Yasumura, 2004] and MOMO
[Wang and O’Friel].
As an examples about force feedback, I will introduce Lead-Me interface by
Amemiya et al. [2008] and CabBoots by Frey [2007]. It can be speculated if MOMO
[Wang and O’Friel] is also using force feedback, too, as it interacts with the user by
vibrating and leaning to the needed direction.
Vibration feedback seems to have great potential to be more intuitive interaction
method to illustrate distance than force feedback. For instance, Erp (et al.) have studied
with users, how distance could be coded in haptic navigation device, which the user
wears [Erp, 2005; Erp et al., 2005].
5
Still, for more everyday situations, like navigating in an unfamiliar city, the force
feedback could be more useful, at least when implemented on a hand-held device.
Firstly, on an everyday situation like this, the user rarely needs any coding for distance,
but rather for direction. Furthermore, people usually would not wear any big,
uncomfortable and heavy wearable devices, but rather they could prefer that some
proper interface could be implemented their own mobile phone.
4. Haptic navigation: examples
In this section, I will introduce six different kinds of haptic navigation devices. None of
these devices are commercial produces, but more like scientific or artistic trials. Yet, it
is never said whether or not some of these examples would end up at the markets. I
have tried to choose different examples as it would be un-wise to discuss similar
devices here.
4.1. MOMO: A haptic navigation device
MOMO is totally haptic and mobile navigation device designed by Wang and O’Friel
[MOMO; Wang and O’Friel]. It navigates the user by vibrating and leaning to the
direction, where one is about to go. There is no haptic input interaction available, only
interaction is output. Unfortunately there is no explicit information available that could
comprehensive describe how user could interact with MOMO. The designers state that
they have pre-programmed the routes they have used to test the device, so it seems that
there is no possibility to give direct orders to the device, at least not nowadays.
MOMO is twelve inches (about 30 centimetres) tall, the diameter is eight inches
(about 20 cm) and the weight one pound (less than half of a kilogramme).
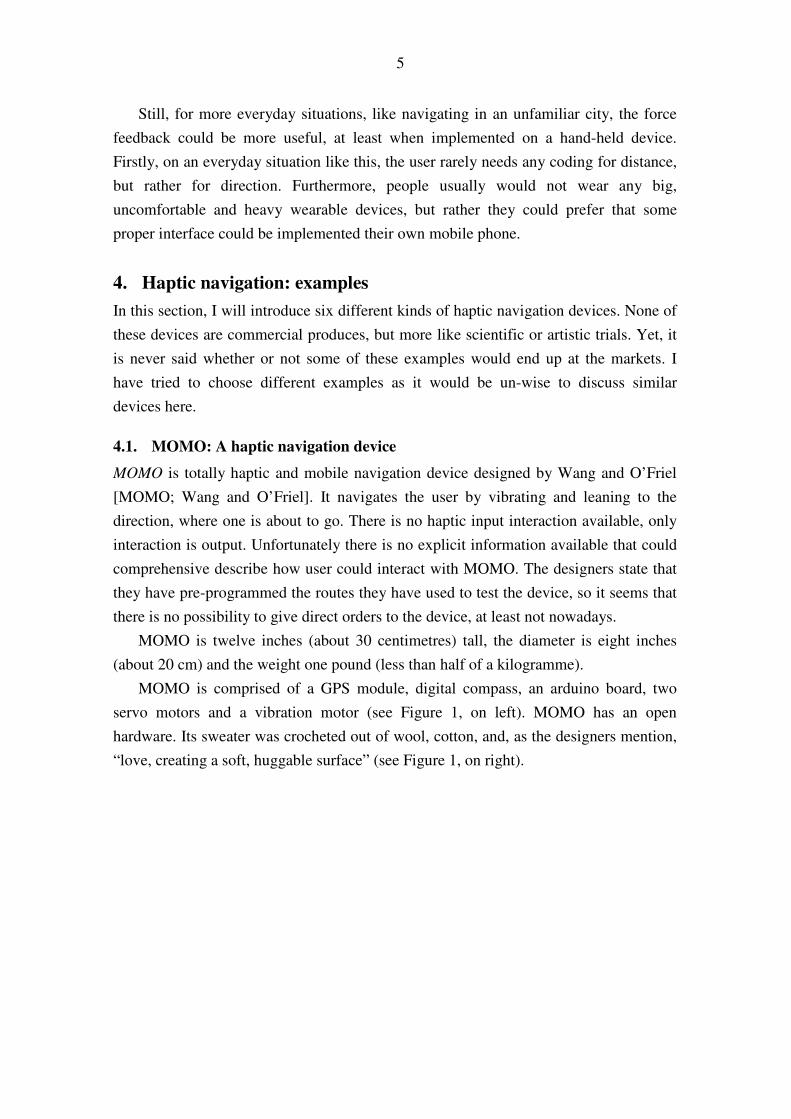
MOMO is comprised of a GPS module, digital compass, an arduino board, two
servo motors and a vibration motor (see Figure 1, on left). MOMO has an open
hardware. Its sweater was crocheted out of wool, cotton, and, as the designers mention,
“love, creating a soft, huggable surface” (see Figure 1, on right).
6
Figure 1: On left, the mechanics of MOMO, on right, MOMO in its clothing.
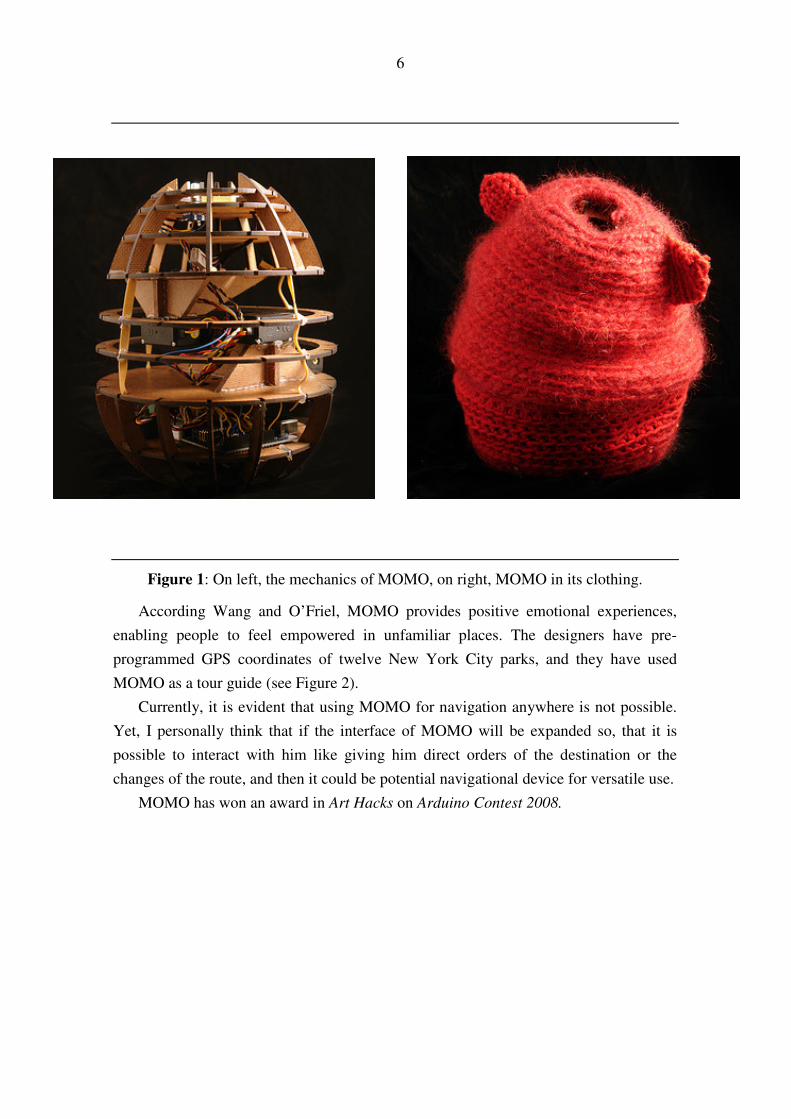
According Wang and O’Friel, MOMO provides positive emotional experiences,
enabling people to feel empowered in unfamiliar places. The designers have pre-
programmed GPS coordinates of twelve New York City parks, and they have used
MOMO as a tour guide (see Figure 2).
Currently, it is evident that using MOMO for navigation anywhere is not possible.
Yet, I personally think that if the interface of MOMO will be expanded so, that it is
possible to interact with him like giving him direct orders of the destination or the
changes of the route, and then it could be potential navigational device for versatile use.
MOMO has won an award in Art Hacks on Arduino Contest 2008.
7
Figure 2. MOMO working.
4.2. Lead-Me Interface for a Pulling Sensation from hand-held Devices
Lead-Me interface uses metaphor of pulling and pushing when guiding the user.
Amemiya et al. [2008] compares metaphor to a situation, where parent leads a child.
The child can watch around while they know that direction is about to be changed when
parent pushes or pulls them on hand.
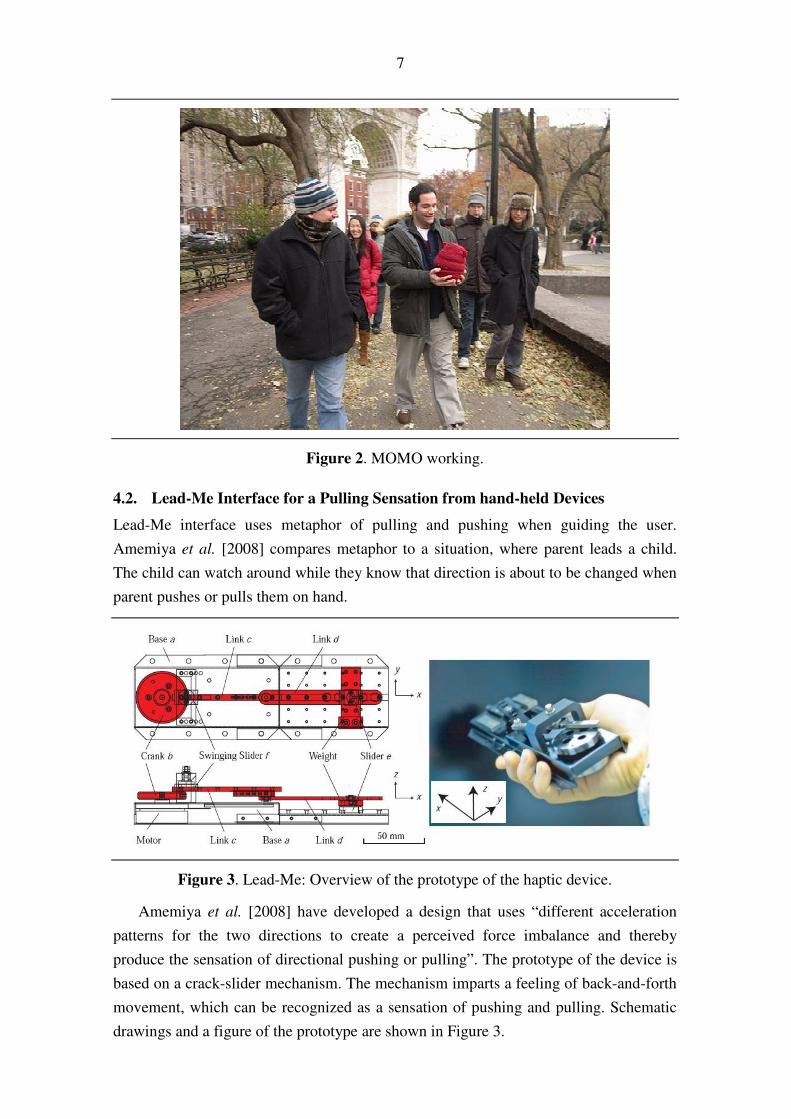
Figure 3. Lead-Me: Overview of the prototype of the haptic device.
Amemiya et al. [2008] have developed a design that uses “different acceleration
patterns for the two directions to create a perceived force imbalance and thereby
produce the sensation of directional pushing or pulling”. The prototype of the device is
based on a crack-slider mechanism. The mechanism imparts a feeling of back-and-forth
movement, which can be recognized as a sensation of pushing and pulling. Schematic
drawings and a figure of the prototype are shown in Figure 3.
8
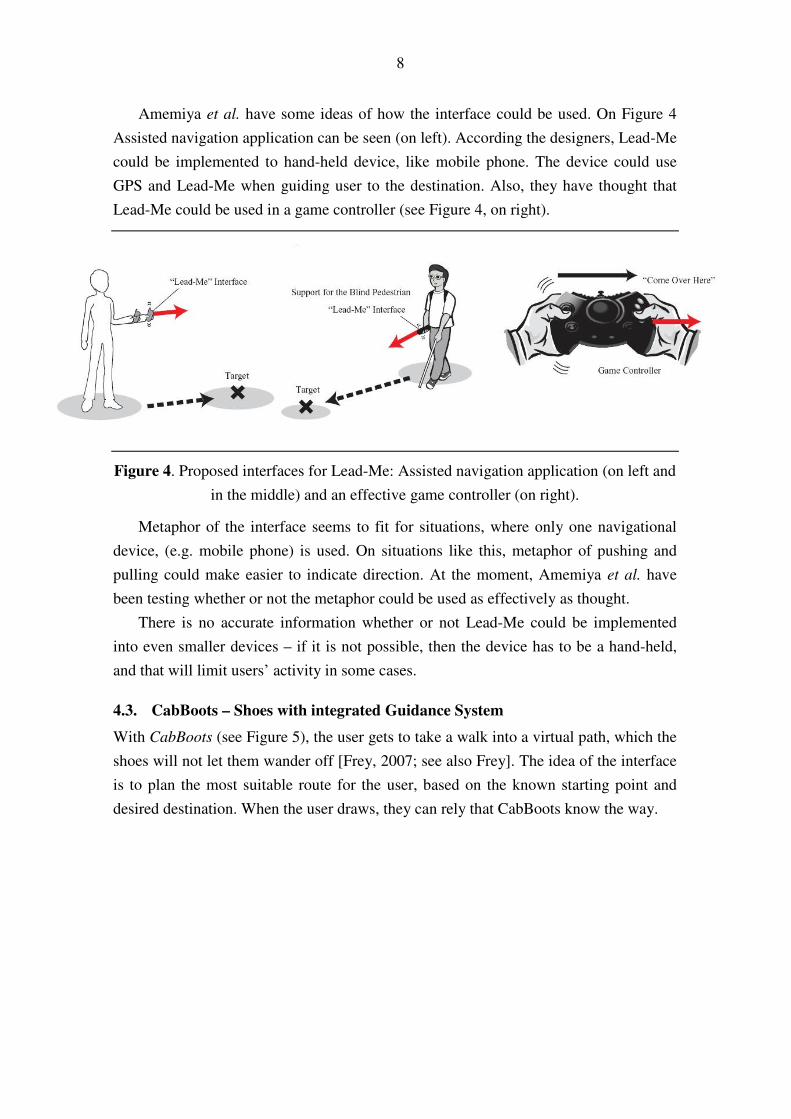
Amemiya et al. have some ideas of how the interface could be used. On Figure 4
Assisted navigation application can be seen (on left). According the designers, Lead-Me
could be implemented to hand-held device, like mobile phone. The device could use
GPS and Lead-Me when guiding user to the destination. Also, they have thought that
Lead-Me could be used in a game controller (see Figure 4, on right).
Figure 4. Proposed interfaces for Lead-Me: Assisted navigation application (on left and
in the middle) and an effective game controller (on right).
Metaphor of the interface seems to fit for situations, where only one navigational
device, (e.g. mobile phone) is used. On situations like this, metaphor of pushing and
pulling could make easier to indicate direction. At the moment, Amemiya et al. have
been testing whether or not the metaphor could be used as effectively as thought.
There is no accurate information whether or not Lead-Me could be implemented
into even smaller devices – if it is not possible, then the device has to be a hand-held,
and that will limit users’ activity in some cases.
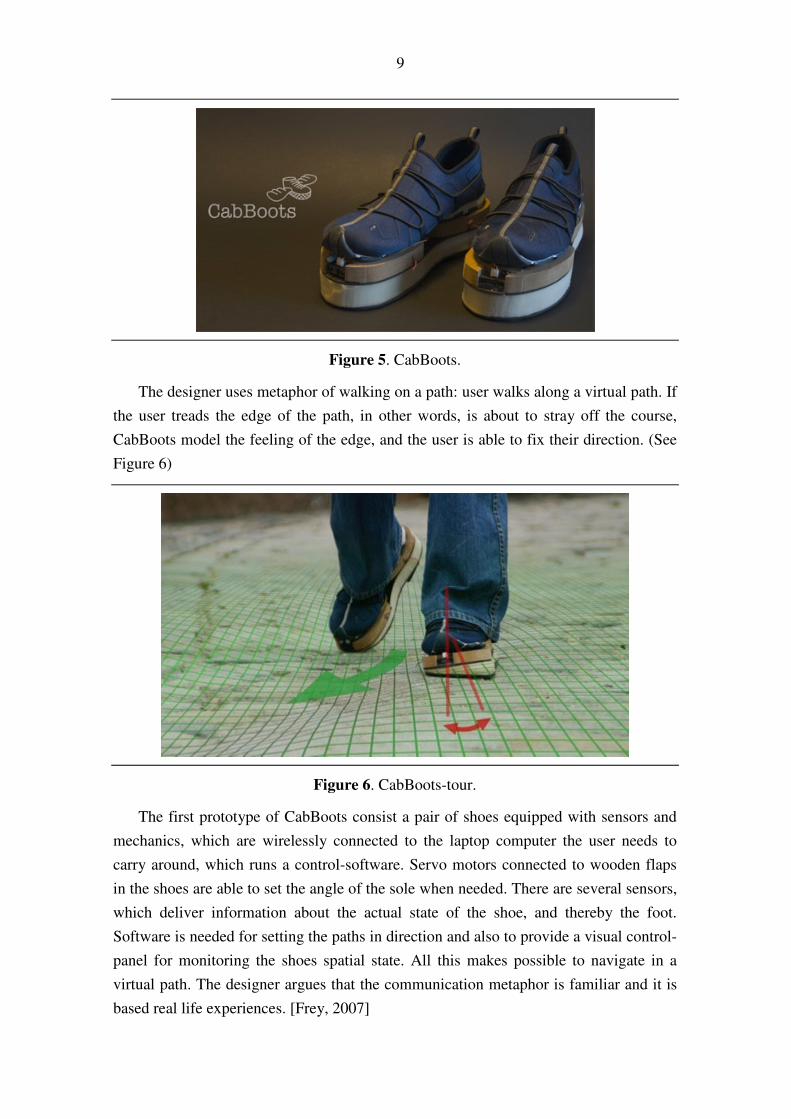
4.3. CabBoots – Shoes with integrated Guidance System
With CabBoots (see Figure 5), the user gets to take a walk into a virtual path, which the
shoes will not let them wander off [Frey, 2007; see also Frey]. The idea of the interface
is to plan the most suitable route for the user, based on the known starting point and
desired destination. When the user draws, they can rely that CabBoots know the way.
9
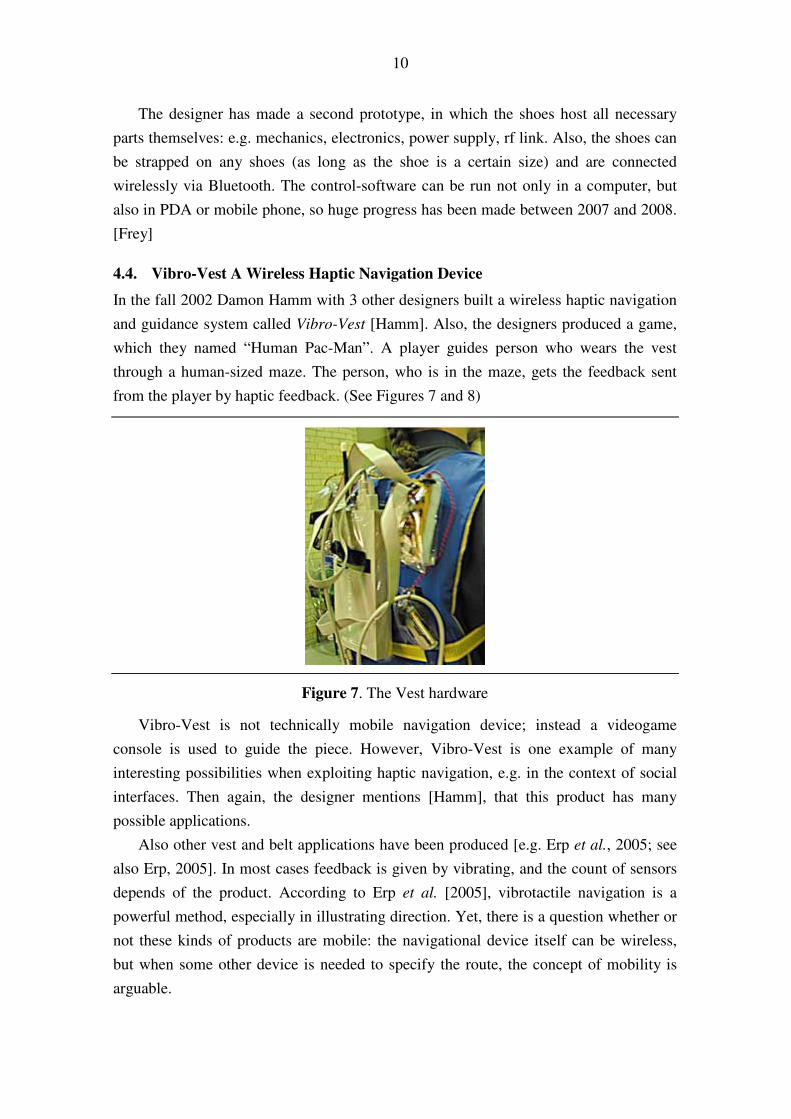
Figure 5. CabBoots.
The designer uses metaphor of walking on a path: user walks along a virtual path. If
the user treads the edge of the path, in other words, is about to stray off the course,
CabBoots model the feeling of the edge, and the user is able to fix their direction. (See
Figure 6)
Figure 6. CabBoots-tour.
The first prototype of CabBoots consist a pair of shoes equipped with sensors and
mechanics, which are wirelessly connected to the laptop computer the user needs to
carry around, which runs a control-software. Servo motors connected to wooden flaps
in the shoes are able to set the angle of the sole when needed. There are several sensors,
which deliver information about the actual state of the shoe, and thereby the foot.
Software is needed for setting the paths in direction and also to provide a visual control-
panel for monitoring the shoes spatial state. All this makes possible to navigate in a
virtual path. The designer argues that the communication metaphor is familiar and it is
based real life experiences. [Frey, 2007]
10
The designer has made a second prototype, in which the shoes host all necessary
parts themselves: e.g. mechanics, electronics, power supply, rf link. Also, the shoes can
be strapped on any shoes (as long as the shoe is a certain size) and are connected
wirelessly via Bluetooth. The control-software can be run not only in a computer, but
also in PDA or mobile phone, so huge progress has been made between 2007 and 2008.
[Frey]
4.4. Vibro-Vest A Wireless Haptic Navigation Device
In the fall 2002 Damon Hamm with 3 other designers built a wireless haptic navigation
and guidance system called Vibro-Vest [Hamm]. Also, the designers produced a game,
which they named “Human Pac-Man”. A player guides person who wears the vest
through a human-sized maze. The person, who is in the maze, gets the feedback sent
from the player by haptic feedback. (See Figures 7 and 8)
Figure 7. The Vest hardware
Vibro-Vest is not technically mobile navigation device; instead a videogame
console is used to guide the piece. However, Vibro-Vest is one example of many
interesting possibilities when exploiting haptic navigation, e.g. in the context of social
interfaces. Then again, the designer mentions [Hamm], that this product has many
possible applications.
Also other vest and belt applications have been produced [e.g. Erp et al., 2005; see
also Erp, 2005]. In most cases feedback is given by vibrating, and the count of sensors
depends of the product. According to Erp et al. [2005], vibrotactile navigation is a
powerful method, especially in illustrating direction. Yet, there is a question whether or
not these kinds of products are mobile: the navigational device itself can be wireless,
but when some other device is needed to specify the route, the concept of mobility is
arguable.
11
Figure 8. Video game console (on left) and the human-sized maze (on right).
4.5. ActiveBelt
ActiveBelt is a novel belt-type wearable tactile display that can transmit directional
information for the user. According Tsukada and Yasumura [2004], there is at least
three advantages in this kind of a haptic navigation device: (1) as there is several
sensors on the belt (on their prototype, they use eight sensors), the user can easily match
the information given from the device to the directions in the real world. (2) As the
users usually wear a belt, there is no need to wear anything extra, as on this device, the
actuator can be attached on the users own belt. (3) Furthermore, there are several
applications the device can use. The applications Tsukada and Yasumura have
developed will be discussed below.
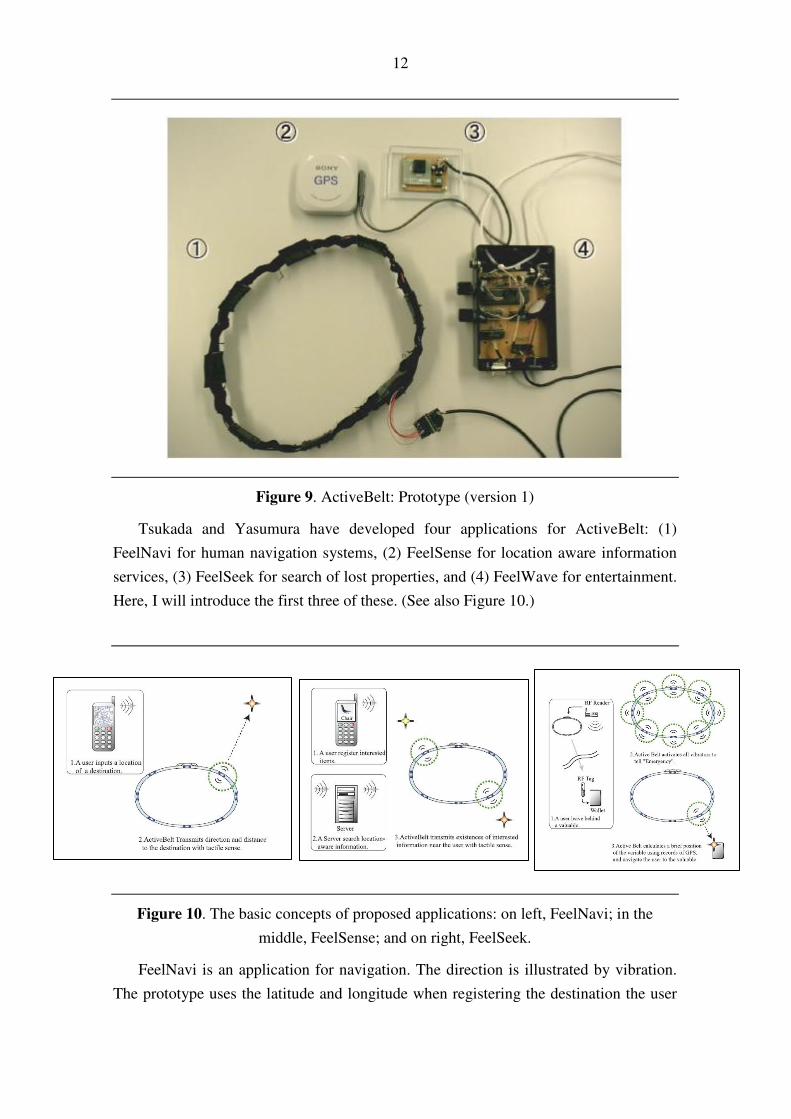
Figure 9 shows the prototype of the device. There are four components: the
hardware (version 1) (1), a GPS (2), a directional sensor (3) and a microcomputer (4).
Tsukada and Yasumura state also that they have designed the version 2 of the device so
that the size of the belt is universal; the sensors can be moved so the device can be worn
by several users.
12
Figure 9. ActiveBelt: Prototype (version 1)
Tsukada and Yasumura have developed four applications for ActiveBelt: (1)
FeelNavi for human navigation systems, (2) FeelSense for location aware information
services, (3) FeelSeek for search of lost properties, and (4) FeelWave for entertainment.
Here, I will introduce the first three of these. (See also Figure 10.)
Figure 10. The basic concepts of proposed applications: on left, FeelNavi; in the
middle, FeelSense; and on right, FeelSeek.
FeelNavi is an application for navigation. The direction is illustrated by vibration.
The prototype uses the latitude and longitude when registering the destination the user

13
needs to reach; the device uses this information among the information about users’
current position and orientation, and activates the sensor that illustrates the direction.
FeelSense is a location-aware information system. The user can pre-register some
information, like which shops they are interested in, and the application can then
communicate to the user, when something matching their concern is nearby.
FeelSeek is an application to remind users of valuables left behind. Furthermore,
the application can lead the user back to the spot the item was left. The combination of
ActiveBelt, FeelSeek application and RFID tags is used.
4.6. Technojewerly
In 2001, IDEO [IDEO] executed a project, which purpose was to bring two new and at
the same time, very ordinary technologies closer to everyday usage. Penta Phone and
Ring Phone are concepts for mobile phones, and GPS Toes is a navigational device (see
Figure 11). The idea of producing these kinds of concepts was to prove, that new
technology does not need to look unfamiliar or uncanny, but it can and should be
integrated our word and users’ person.
GPS Toes (see Figure 11, on right) uses low-power, nano-derived technology. GPS
Toes communicates with a GPS receiver nearby, like the one which is in the user’s
purse. The device indicates the direction by vibrating and lighting up to signal
upcoming direction changes; a ring in a left toe to the left, in a right toe to the right.
According the designers, GPS Toes can be used whether driving a car, walking on the
streets, or hiking on the countryside.
Unfortunately, these products were concepts only, and those cannot be invested
reselling.
Figure 11. Technojewerly. GPS Toes on right.

14
5. Conclusion
What I was most longing during my survey, was some product, which would slightly be
like IDEOs’ Technojewelry concept; that is because in my opinion, GPS Toes is (of the
all products I was able to find) alone imperceptible, mobile, handy and ordinary
enough, that it could be useful when navigating; specially if it could use some
promising interface, like Lead-Me. Most of the devices illustrated on this paper appear
to limit the user’s motion. Vest and belt devices are large and seemingly unwieldy, at
least many of them. All different kinds of hand-held devices, like mobile phones,
require that the user has to keep them in hand while using. Both MOMO and CabBoots
might be too extraordinary for everyday use; likewise, MOMO is needed to be held
with both hands, so it encumbers the user’s activities a lot. Hopefully, in future there
will be some hand-held or wearable devices, which can be used for haptic navigation,
with appearance ordinary enough. For this purpose, ActiveBelt could be promising
option, with the many interesting ideas of applications the developers have.
Haptics open up a possibility for navigation to be novel and cognitively lighter.
Haptic navigation has lots of potential, both in virtual environments and in real world.
The benefits it offers for special needs and for all others are large. Yet, more research
and development is needed, so haptic navigation could be more commonly used.
Currently, haptics can be one element used in navigational devices, together with other
modalities. Perhaps also in the future there is need to use several modalities in
communication between the user and navigation device – after all, as the users are
multimodal, should the device be also.
15
References
[AMEMIYA et al., 2008] AMEMIYA, T., ANDO, H. and MAEDA, T., 2008. Lead-me
interface for a pulling sensation from hand-held devices. ACM
Trans.Appl.Percept., 5(3), pp. 1-17.
[AMEMIYA and SUGIYAMA, 2008] AMEMIYA, T. and SUGIYAMA, H., 2008.
Design of a Haptic Direction Indicator for Visually Impaired People in
Emergency Situations. Computers Helping People with Special Needs. Springer,
pp. 1141-1144.
[BOSMAN et al., 2003] BOSMAN, S., GROENENDAAL, B., FINDLATER, J.W.,
VISSER, T., GRAAF, M. and MARKOPOULOS, P., 2003. GentleGuide: An
Exploration of Haptic Output for Indoors Pedestrian Guidance. Proceedings of the
Mobile HCI, 8-10-2003, Springer Publications, pp. 358-362.
[BRADLEY and DUNLOP, 2005] BRADLEY, A. and DUNLOP, D., 2005. An
Experimental Investigation into Wayfinding Directions for Visually Impaired
People. Personal Ubiquitous Comput., 9(6), pp. 395-403.
[CHAPMAN et al., 2001] CHAPMAN, C.D., HEATH, M.D., WESTWOOD, D.A. and
ROY, E.A., 2001. Memory for kinesthetically defined target location: Evidence
for manual asymmetries. Brain and cognition, 46(1-2), pp. 62-66.
[ERP, 2005] ERP, JAN B.F. VAN, 2005. Presenting directions with a vibrotactile torso
display. Ergonomics, 48(3), pp. 302.
[ERP, 2001] ERP, J.B.F. VAN., 2001. Tactile Navigation Display. Proceedings of the
First International Workshop on Haptic Human-Computer Interaction, 2001,
Springer-Verlag pp. 165-173.
[ERP et al., 2005] ERP, J.B.F. Van., VEEN, H.A.H.C.V., JANSEN, C. and DOBBINS,
T., 2005. Waypoint navigation with a vibrotactile waist belt. ACM
Trans.Appl.Percept., 2(2), pp. 106-117.
[FREY, 2007] FREY, M., 2007. CabBoots: shoes with integrated guidance system.
Proceedings of the 1st international conference on Tangible and embedded
interaction, 2007, ACM pp. 245-246.
[FREY] FREY, M., CabBoots - Shoes with Integrated Guidance System. Available:
http://www.freymartin.de/en/projects/cabboots [9/22, 2008].
[HAMM] HAMM, D., Damon Hamm - Haptic Navigation Device: Vibro-Vest A
Wireless Haptic Navigation Device. Available:
http://www.damonhamm.com/oldsite/vibrovest.html [9/22, 2008].
[IDEO] Technojewelry - Case Studies - IDEO. Available:
http://www.ideo.com/work/item/technojewelry/ [9/30, 2008].
[JONSSON, 2002] JONSSON, E., 2002. Inner navigation: why we get lost and how we
find our way. Scribner, New York, pp. 27-126.
16
[MOMO] MOMO: A haptic navigation device. 2008. Libelium.
[NEMEC et al., 2004] NEMEC, V., SPORKA, A.J. and SLAVIK, P., 2004. Haptic and
Spatial Audio Based Navigation of Visually Impaired Users in Virtual
Environment Using Low Cost Devices. User-Centered Interaction Paradigms for
Universal Access in the Information Society, Springer, pp. 452-459.
[OED] OED, Oxford English Dictionary 2008 - last update [Homepage of Oxford
University Press], [Online]. Available: http://dictionary.oed.com/ [9/25, 2008].
[TSUKADA and YASUMURA, 2004] TSUKADA, K. and YASUMURA, M., 2004.
ActiveBelt: Belt-Type Wearable Tactile Display for Directional Navigation. Proc.
of Ubicomp 04 (2004), Springer, pp. 384-399.
[WALL and BREWSTER, 2006] WALL, S. and BREWSTER, S., 2006. Feeling what
you hear: tactile feedback for navigation of audio graphs. CHI '06: Proceedings of
the SIGCHI conference on Human Factors in computing systems, 2006, ACM pp.
1123-1132.
[WANG and O’FRIEL] WANG, C. and O’FRIEL, K., MOMO: a haptic navigation
device. Available: http://momobots.com/ [9/22, 2008].








![LNCS 7468 - Mobile Haptic Technology Development through ... · [6]. Most haptic interaction systems are based on a desktop paradigm [7]. This also goes for high resolution wearable](https://img.pdfslide.net/doc/110x75/5e762fb7ce91bd1fba5beddf/lncs-7468-mobile-haptic-technology-development-through-6-most-haptic-interaction.jpg)



![LNCS 7468 - Mobile Haptic Technology …...Mobile Haptic Technology Development through Artistic Exploration 33 seamlessly in everyday objects [9]. York also refers to it as machine](https://img.pdfslide.net/doc/110x75/5faf80c52bac116dea713ba8/lncs-7468-mobile-haptic-technology-mobile-haptic-technology-development-through.jpg)
















