Embed Size (px)
Citation preview
Hierarchical Matrix Computations:GPU Implementations and Applications
George TurkiyyahKAUST and American University of Beirut
Workshop on Scalable Hierarchical Algorithms for Extreme ComputingMay 9, 2016
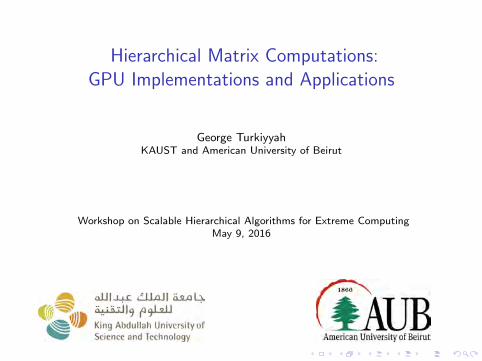
ContextI substantial increase in node performance (manycore, wide vectors)
will have to be accomplished with much smaller increase in memory
I we will be expected to work in memory-starved environments,compared to today’s machines
I current GPUs are somewhat representative of this environment
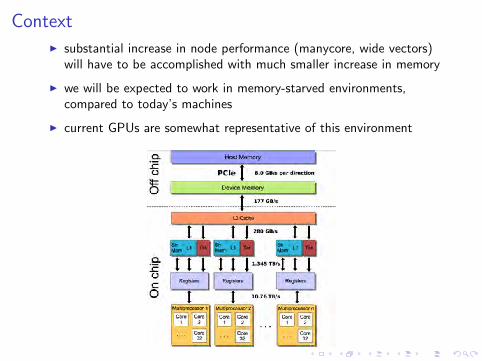
H-matrix blocking
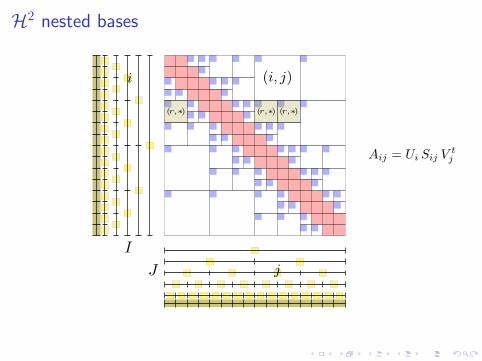
H2 nested bases
I
J
(i, j)i
j
(r,∗) (r,∗) (r,∗)
Aij = Ui Sij Vtj
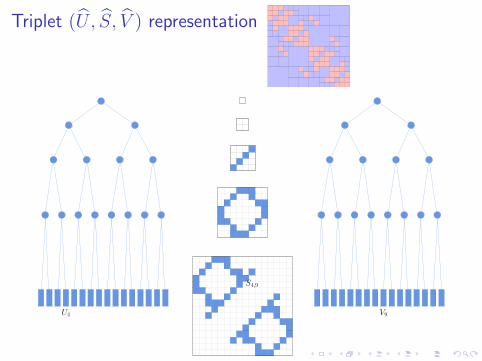
Triplet (U , S, V ) representation
V9
S4,9
U4
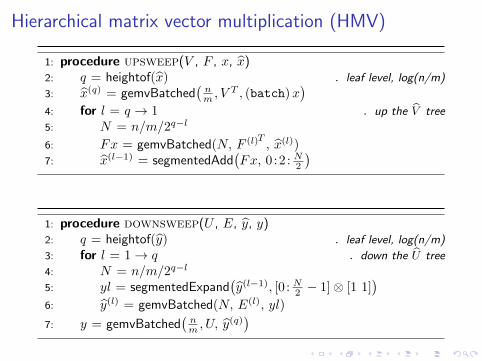
Hierarchical matrix vector multiplication (HMV)
1: procedure upsweep(V , F , x, x)2: q = heightof(x) . leaf level, log(n/m)
3: x(q) = gemvBatched(nm , V
T , (batch)x)
4: for l = q → 1 . up the V tree
5: N = n/m/2q−l
6: Fx = gemvBatched(N, F (l)T , x(l))7: x(l−1) = segmentedAdd
(Fx, 0:2 : N2
)
1: procedure downsweep(U , E, y, y)2: q = heightof(y) . leaf level, log(n/m)
3: for l = 1→ q . down the U tree
4: N = n/m/2q−l
5: yl = segmentedExpand(y(l−1), [0 : N2 − 1]⊗ [1 1]
)
6: y(l) = gemvBatched(N, E(l), yl)
7: y = gemvBatched(nm , U, y
(q))
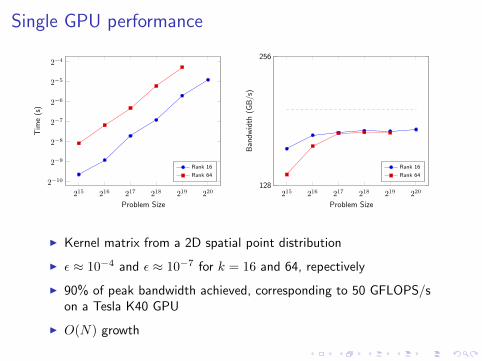
Single GPU performance
215 216 217 218 219 220
2−10
2−9
2−8
2−7
2−6
2−5
2−4
Problem Size
Tim
e(s
)
Rank 16
Rank 64
215 216 217 218 219 220128
256
Problem Size
Ban
dw
idth
(GB
/s)
Rank 16
Rank 64
I Kernel matrix from a 2D spatial point distribution
I ε ≈ 10−4 and ε ≈ 10−7 for k = 16 and 64, repectively
I 90% of peak bandwidth achieved, corresponding to 50 GFLOPS/son a Tesla K40 GPU
I O(N) growth
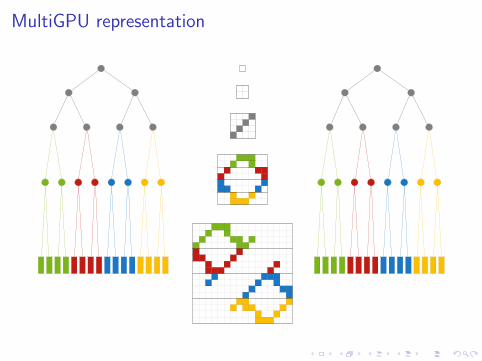
MultiGPU representation
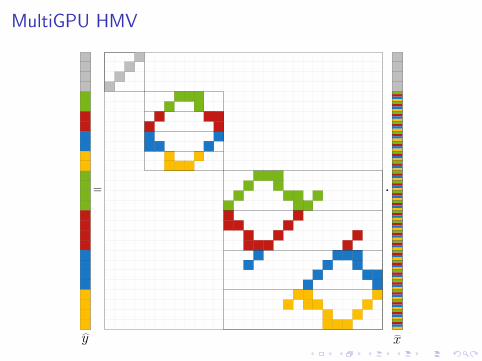
MultiGPU HMV
= ·
y x
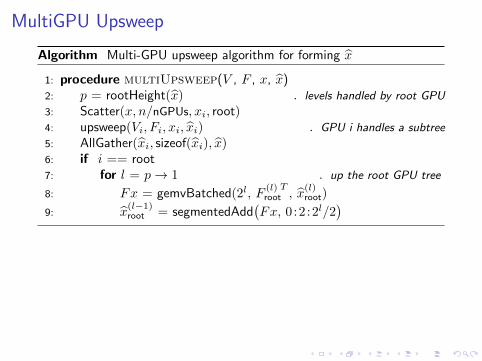
MultiGPU Upsweep
Algorithm Multi-GPU upsweep algorithm for forming x
1: procedure multiUpsweep(V , F , x, x)2: p = rootHeight(x) . levels handled by root GPU
3: Scatter(x, n/nGPUs, xi, root)4: upsweep(Vi, Fi, xi, xi) . GPU i handles a subtree
5: AllGather(xi, sizeof(xi), x)6: if i == root7: for l = p→ 1 . up the root GPU tree
8: Fx = gemvBatched(2l, F(l)root
T, x
(l)root)
9: x(l−1)root = segmentedAdd
(Fx, 0:2 :2l/2
)
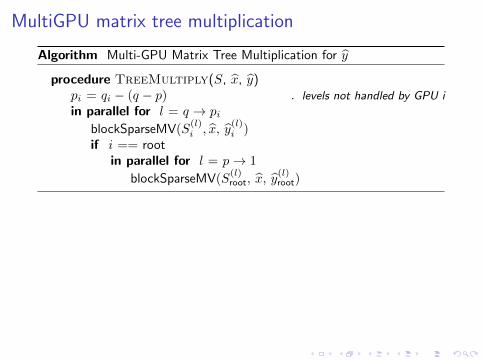
MultiGPU matrix tree multiplication
Algorithm Multi-GPU Matrix Tree Multiplication for y
procedure TreeMultiply(S, x, y)pi = qi − (q − p) . levels not handled by GPU i
in parallel for l = q → piblockSparseMV(S
(l)i , x, y
(l)i )
if i == rootin parallel for l = p→ 1
blockSparseMV(S(l)root, x, y
(l)root)
MultiGPU Downsweep
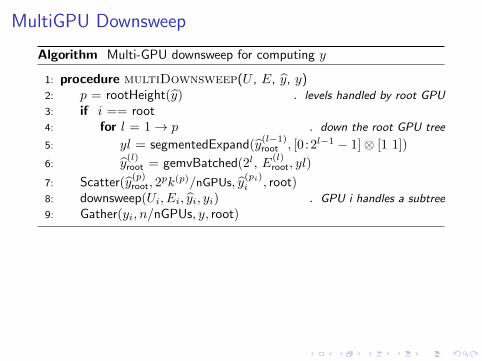
Algorithm Multi-GPU downsweep for computing y
1: procedure multiDownsweep(U , E, y, y)2: p = rootHeight(y) . levels handled by root GPU
3: if i == root4: for l = 1→ p . down the root GPU tree
5: yl = segmentedExpand(y(l−1)root , [0 :2l−1 − 1]⊗ [1 1])
6: y(l)root = gemvBatched(2l, E
(l)root, yl)
7: Scatter(y(p)root, 2
pk(p)/nGPUs, y(pi)i , root)
8: downsweep(Ui, Ei, yi, yi) . GPU i handles a subtree
9: Gather(yi, n/nGPUs, y, root)
MultiGPU performance
215 216 217 218 219 220 221
2−9
2−8
2−7
2−6
2−5
Problem Size
Tim
e(s
)
1 GPU
2 GPUs
4 GPUs
8 GPUs
215 216 217 218 219 220 221128
256
512
1,024
Problem Size
Ban
dw
idth
(GB
/s)
1 GPU
2 GPUs
4 GPUs
8 GPUs
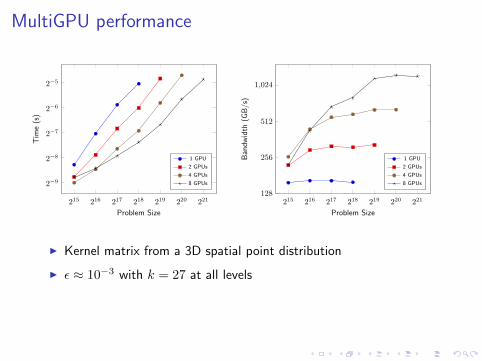
I Kernel matrix from a 3D spatial point distribution
I ε ≈ 10−3 with k = 27 at all levels
MultiGPU performance (k = 64)
215 216 217 218 219 220
2−8
2−7
2−6
2−5
2−4
Problem Size
Tim
e(s
)
1 GPU
2 GPUs
4 GPUs
8 GPUs
215 216 217 218 219 220
256
512
1,024
Problem Size
Ban
dw
idth
(GB
/s)
1 GPU
2 GPUs
4 GPUs
8 GPUs
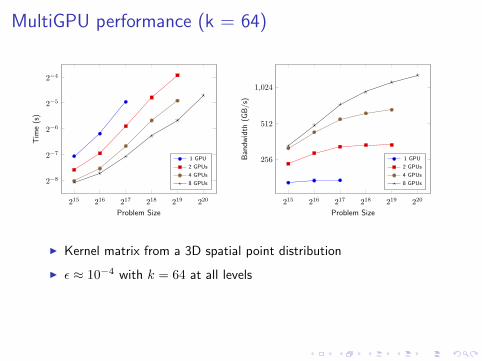
I Kernel matrix from a 3D spatial point distribution
I ε ≈ 10−4 with k = 64 at all levels
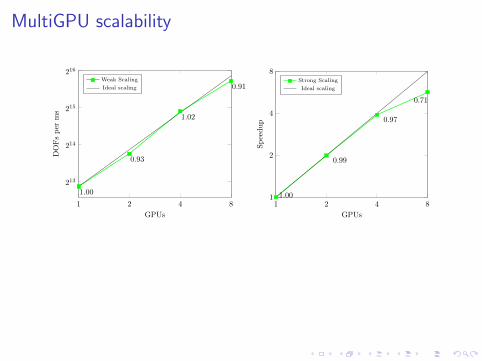
MultiGPU scalability
1 2 4 8
213
214
215
216
1.00
0.93
1.02
0.91
GPUs
DOFsper
ms
Weak Scaling
Ideal scaling
1 2 4 81
2
4
8
1.00
0.99
0.97
0.71
GPUs
Speedup
Strong Scaling
Ideal scaling
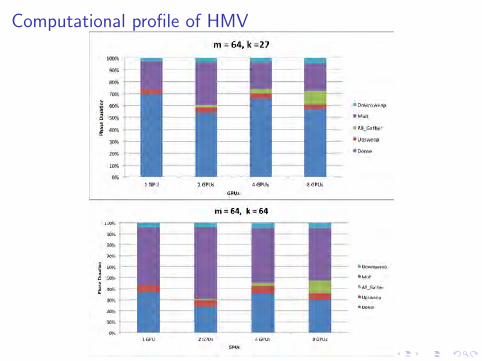
Computational profile of HMV
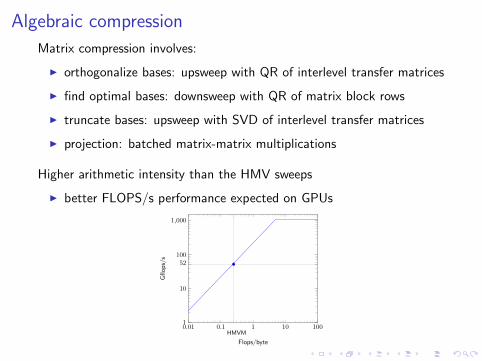
Algebraic compression
Matrix compression involves:
I orthogonalize bases: upsweep with QR of interlevel transfer matrices
I find optimal bases: downsweep with QR of matrix block rows
I truncate bases: upsweep with SVD of interlevel transfer matrices
I projection: batched matrix-matrix multiplications
Higher arithmetic intensity than the HMV sweeps
I better FLOPS/s performance expected on GPUs
0.01 0.1 1 10 1001
10
100
1,000
HMVM
52
Flops/byte
Gfl
ops/
s
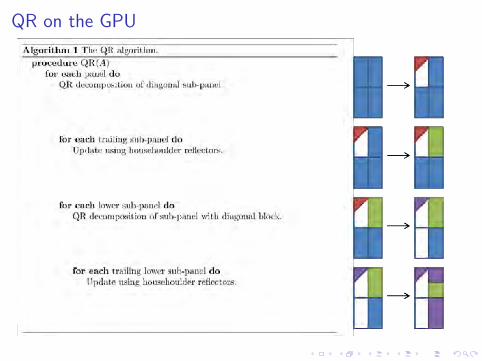
QR on the GPU
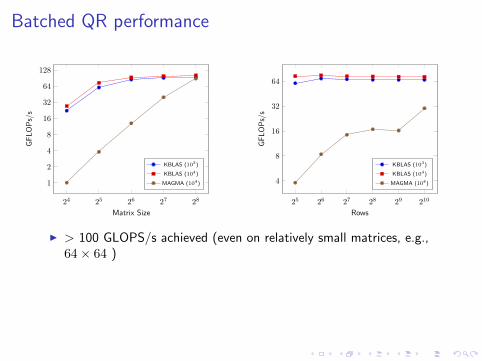
Batched QR performance
24 25 26 27 28
1
2
4
8
16
32
64
128
Matrix Size
GF
LO
Ps/
s
KBLAS (103)
KBLAS (104)
MAGMA (104)
25 26 27 28 29 210
4
8
16
32
64
Rows
GF
LO
Ps/
s
KBLAS (103)
KBLAS (104)
MAGMA (104)
I > 100 GLOPS/s achieved (even on relatively small matrices, e.g.,64× 64 )
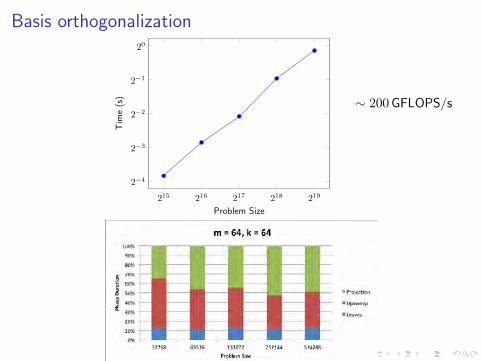
Basis orthogonalization
215 216 217 218 219
2−4
2−3
2−2
2−1
20
Problem Size
Tim
e(s
) ∼ 200 GFLOPS/s
High dimensional integration
Multivariate normal integration:
Φn(a, b; Σ) =
∫ b
a
φn(x; Σ) dx
=1√
|Σ|(2π)n
∫ b1
a1
∫ b2
a2
. . .
∫ bn
an
e−12x
tΣ−1x dxn · · · dx1
Computational approaches when d is moderate to high:
I Monte Carlo methods
I quasi-Monte Carlo
I sparse grids
Seek to exploit a hierarchical structure of the covariance matrix tocompute approximations of the MVN integral efficiently.
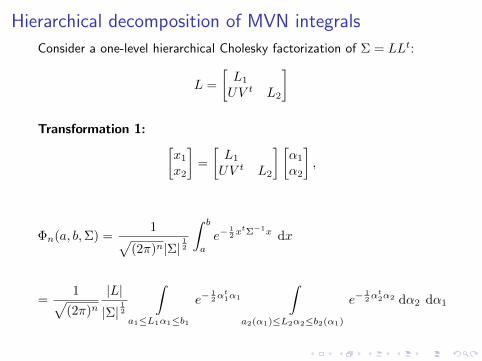
Hierarchical decomposition of MVN integrals
Consider a one-level hierarchical Cholesky factorization of Σ = LLt:
L =
[L1
UV t L2
]
Transformation 1:[x1
x2
]=
[L1
UV t L2
] [α1
α2
],
Φn(a, b,Σ) =1
√(2π)n|Σ| 12
∫ b
a
e−12x
tΣ−1x dx
=1√
(2π)n|L||Σ| 12
∫
a1≤L1α1≤b1
e−12α
t1α1
∫
a2(α1)≤L2α2≤b2(α1)
e−12α
t2α2 dα2 dα1
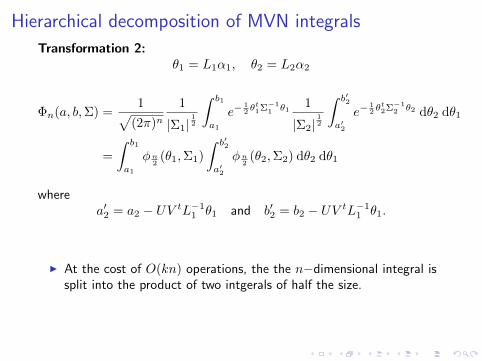
Hierarchical decomposition of MVN integrals
Transformation 2:θ1 = L1α1, θ2 = L2α2
Φn(a, b,Σ) =1√
(2π)n1
|Σ1|12
∫ b1
a1
e−12 θ
t1Σ−1
1 θ11
|Σ2|12
∫ b′2
a′2
e−12 θ
t2Σ−1
2 θ2 dθ2 dθ1
=
∫ b1
a1
φn2
(θ1,Σ1)
∫ b′2
a′2
φn2
(θ2,Σ2) dθ2 dθ1
wherea′2 = a2 − UV tL−1
1 θ1 and b′2 = b2 − UV tL−11 θ1.
I At the cost of O(kn) operations, the the n−dimensional integral issplit into the product of two intgerals of half the size.
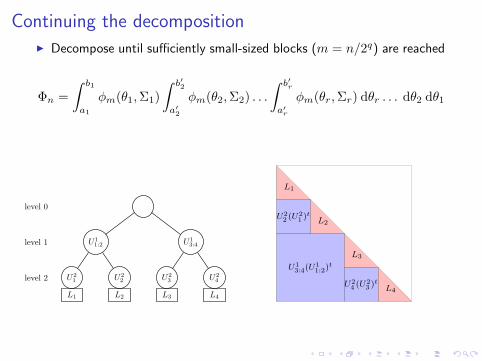
Continuing the decompositionI Decompose until sufficiently small-sized blocks (m = n/2q) are reached
Φn =
∫ b1
a1
φm(θ1,Σ1)
∫ b′2
a′2
φm(θ2,Σ2) . . .
∫ b′r
a′r
φm(θr,Σr) dθr . . . dθ2 dθ1
U11:2
U21 U2
2
U13:4
U23 U2
4
L1 L2 L3 L4
level 0
level 1
level 2
L1
L2
L3
L4
U22 (U
21 )
t
U24 (U
23 )
t
U13:4(U
11:2)
t
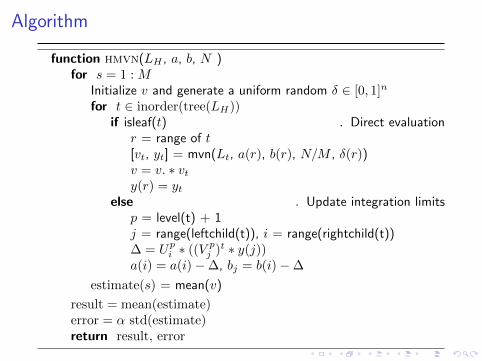
Algorithm
function hmvn(LH , a, b, N )for s = 1 : M
Initialize v and generate a uniform random δ ∈ [0, 1]n
for t ∈ inorder(tree(LH))if isleaf(t) . Direct evaluation
r = range of t[vt, yt] = mvn(Lt, a(r), b(r), N/M , δ(r))v = v. ∗ vty(r) = yt
else . Update integration limitsp = level(t) + 1j = range(leftchild(t)), i = range(rightchild(t))∆ = Upi ∗ ((V pj )t ∗ y(j))a(i) = a(i)−∆, bj = b(i)−∆
estimate(s) = mean(v)
result = mean(estimate)error = α std(estimate)return result, error
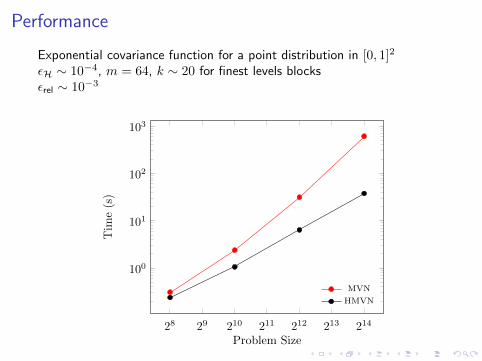
Performance
Exponential covariance function for a point distribution in [0, 1]2
εH ∼ 10−4, m = 64, k ∼ 20 for finest levels blocksεrel ∼ 10−3
28 29 210 211 212 213 214
100
101
102
103
Problem Size
Tim
e(s)
MVN
HMVN
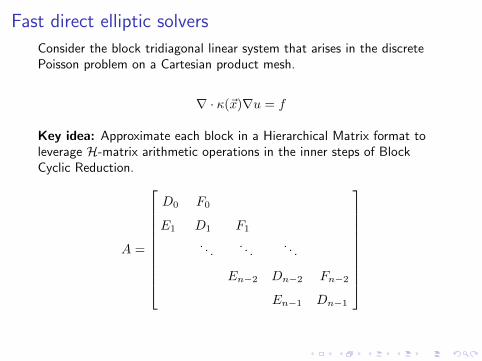
Fast direct elliptic solvers
Consider the block tridiagonal linear system that arises in the discretePoisson problem on a Cartesian product mesh.
∇ · κ(~x)∇u = f
Key idea: Approximate each block in a Hierarchical Matrix format toleverage H-matrix arithmetic operations in the inner steps of BlockCyclic Reduction.
A =
D0 F0
E1 D1 F1
. . .. . .
. . .
En−2 Dn−2 Fn−2
En−1 Dn−1
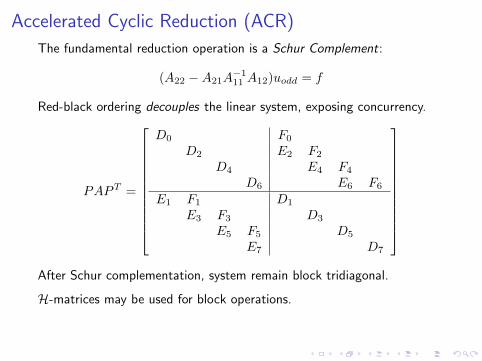
Accelerated Cyclic Reduction (ACR)
The fundamental reduction operation is a Schur Complement:
(A22 −A21A−111 A12)uodd = f
Red-black ordering decouples the linear system, exposing concurrency.
PAPT =
D0 F0
D2 E2 F2
D4 E4 F4
D6 E6 F6
E1 F1 D1
E3 F3 D3
E5 F5 D5
E7 D7
After Schur complementation, system remain block tridiagonal.
H-matrices may be used for block operations.
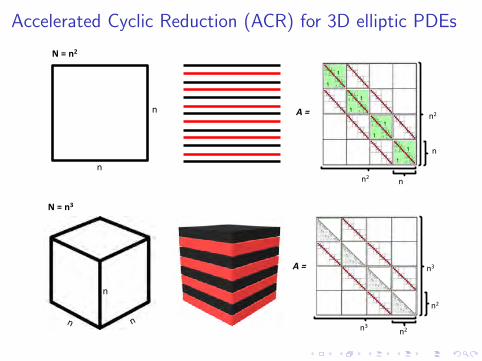
Accelerated Cyclic Reduction (ACR) for 3D elliptic PDEs
N = n3
n
n2
n2
n3
n3
A =
n
n
N = n2
A =
n
n
n2
n2
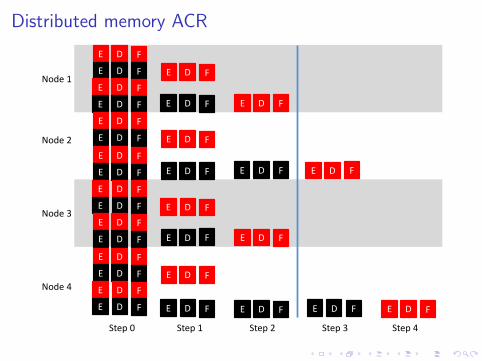
Distributed memory ACR
E
E
E
E
E
E
F
F
F
F
F
F
D
D
D
D
D
D
Step 0 Step 1 Step 2 Step 3 Step 4
E
E
E
E
E
E
F
F
F
F
F
F
D
D
D
D
D
D
E
E
E
E
F
F
F
F
D
D
D
D
E
E
E
F
F
F
D
D
D
E
E
E
F
F
F
D
D
D
E
E
F
F
D
D
E
E
F
F
D
D
E
E
F
F
D
D
E
E
F
F
D
D E F D
Node 1 Node 2 Node 3 Node 4
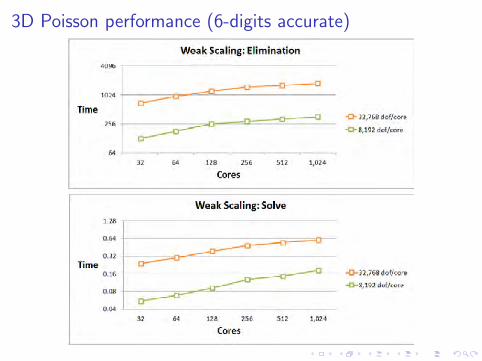
3D Poisson performance (6-digits accurate)
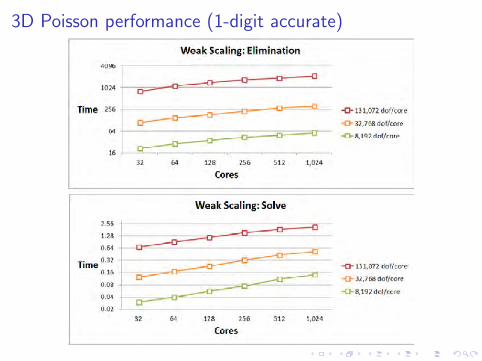
3D Poisson performance (1-digit accurate)
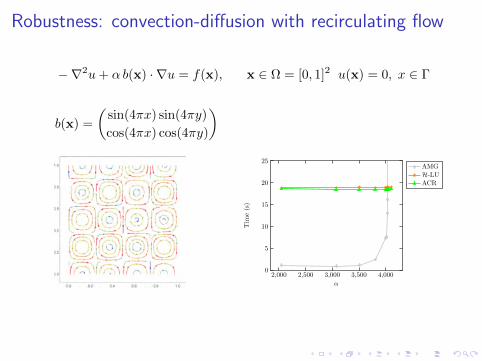
Robustness: convection-diffusion with recirculating flow
−∇2u+ α b(x) · ∇u = f(x), x ∈ Ω = [0, 1]2 u(x) = 0, x ∈ Γ
b(x) =
(sin(4πx) sin(4πy)
cos(4πx) cos(4πy)
)
2,000 2,500 3,000 3,500 4,0000
5
10
15
20
25
α
Tim
e(s)
AMGH-LUACR
ConclusionsI H2 computations are amenable to efficient processing on GPUs
I open the door for many interesting applications


![Key words. AMS subject classifications. · computations that are typical of mesh-based analysis methods [19]. Parallel implementations of multi-level graph algorithms [24] have been](https://img.pdfslide.net/doc/110x75/5d65c55188c993aa7e8b5337/key-words-ams-subject-classi-computations-that-are-typical-of-mesh-based.jpg)