Embed Size (px)
Citation preview

HIGH-ACCURACY ATOMIC FORCE MICROSCOPE FOR DIMENSIONAL METROLOGY
Darya Amin-Shahidi1, Dean M. Ljubicic1, Jerald L. Overcash2, Robert J. Hocken2,
David L. Trumper1 1Mechanical Engineering Department
Massachusetts Institute of Technology Cambridge, MA, USA
2Mechanical Engineering Department University of North Carolina at Charlotte
Charlotte, NC, USA
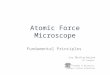
INTRODUCTION In this paper, we present the design, control, and experimental results of a high-accuracy AFM head (HAFM) with sub-nanometer resolution. The HAFM’s mechanical design was completed in the master’s thesis of Ljubicic [1]. The HAFM is designed to be utilized as a high-accuracy single-axis metrology probe. In order to be used for metrology, HAFM will be integrated with the Sub-Atomic Measuring Machine (SAMM) [2], originally designed in the doctoral thesis of Michael Holmes. The SAMM can scan a sample in-plane over a range of 25-mm by 25-mm with 30-nm accuracy and 1-nm repeatability. The HAFM tracks and measures the sample normal to the plane with 0.12-nm RMS resolution at 100-Hz bandwidth. The HAFM uses a commercially available self-sensing Akiyama AFM probe to detect the surface. The self-sensing probe eliminates the need for an optical sensing mechanism and can achieve a more compact design for better integration with SAMM. For higher detection
bandwidth, we use the probe in a frequency-measuring mode, in which the probe moves perpendicular to the sample to maintain a constant self-resonance frequency that corresponds to a fixed tip-sample gap. A piezoelectric-stack moves the probe and three capacitive displacement sensors measure its surface-tracking motion. SYSTEM DESIGN The HAFM system configuration is shown in FIGURE 1. The HAFM sits on the SAMM’s metrology frame using three ball and groove kinematic mounts. The Akiyama probe is fixed to the end of the moving stage and faces the sample surface. The HAFM guide flexure constrains the moving stage to only axial motion. A piezoelectric-stack actuator, with a range of 20 µm, drives the moving stage. A coupling flexure is used to transfer the actuator’s axial motion and to attenuate any non-axial error motion of the piezoelectric actuator. The probe’s output current signal, which is less
FIGURE 1. HAFM system design showing the cross-sectioned AFM head and the control electronics.
Coupling Flexure
Guide Flexure
Moving Stage
Capacitive Sensor
Kinematic MountPiezoelectric
Actuator
IOPre-Amp
VE
Self-ResonanceControl System
Tracking Control
Period Estimation
CapacitiveSensor Box
ADC20 bits
DAC16 bits
PiezoDriver
ImageData
Logging
CLKSR
Vi
TSR
NI Controller
VP
Z
Akiyama Probe
Processor FPGA

than 100 nA, is amplified and converted to a voltage signal on a board close to the probe. A self-resonance control system sets the probe in controlled amplitude self-resonance. The sinusoidal self-resonance signal is converted to a square wave with a comparator (CLKSR) and is passed to the National Instruments real-time controller’s FPGA board. The period (TSR) of CLKSR is measured and used as feedback. The tracking controller commands the piezo driver to move the probe and maintain a constant self-resonance period (TSR), which corresponds to a constant tip-sample gap. Three ADE8810 capacitive displacement sensors, with 50 µm range, are symmetrically spaced around the moving stage to measure its motion as it tracks the sample surface. The average of the three sensors provides a resolution of 0.18 nm RMS at 1-kHz bandwidth. SELF-SENSING AFM PROBE Two advantages of using an AMF probe for metrology are sub nanometer resolution and localized sensing (less than 15-nm tip radius for the Akiyama probe). To achieve a more compact design, the HAFM uses a commercially
available1 self-sensing Akiyama AFM probe, which does not require an optical-lever sensing mechanism. The Akiyama probe consists of a quartz tuning fork and a cantilever symmetrically attached to the ends of the tuning fork’s prongs. The probe’s tip is located at the free end of the cantilever. The application of a harmonic voltage (Ve) to the tuning fork terminals sets the tip in a tapping motion. The tip-sample interaction forces reflect back on the tuning fork’s dynamics, and can be sensed as shifts in the tuning fork’s electrical admittance. Reference [3] describes the probe’s design in more detail. FIGURE 2 shows the probe’s admittance and a diagram of the self-resonance control blocks that we have incorporated around it. The experimentally obtained probe admittance matches the fit based on our lumped parameter model, which includes the admittance of the quartz tuning fork in parallel with its parasitic capacitance. We cancel the parasitic capacitance current by injecting its opposite to the probe’s current signal. The resulting compensated response’s resonance corresponds to the mechanical resonance of the probe, where dynamic stiffness is minimized, and hence the probe’s sensitivity to interactions with the sample is maximized. With a tuning fork, the Akiyama probe has a high quality-factor of about 1200 in air. A high quality-factor improves the probe’s sensitivity but reduces the decay rate of any transient. Long lasting transients reduce the probe’s bandwidth for amplitude-measuring (AM) AFM mode. Albrecht [4] presented a frequency-measuring (FM) AFM mode with a bandwidth independent 1 Akiyama probe is a product of NanoSensorsTM. Probe image in FIGURE 1 is from Nanosensors, with permission.
FIGURE 2. Self-resonance loop including the probe dynamics and the control blocks.
0 400 800 1200
46.6
46.7
46.8
46.9
Retract (nm) Approach
Sel
f-Res
. Fre
q. (k
Hz) 22 nA
24 nA29 nA
34 nA38 nA56 nA
FIGURE 3. Sensing curves for an Akiyama probe at different oscillation amplitudes.
I-V
All-Pass Filter
Precision Rectifier
Amp. Control
Ve Io
48.1 48.3 48.510
-8
10-7
10-6
Adm
ittan
ce [M
ho]
48.1 48.3 48.5
-120
-60
0
60
Frequency [kHz]
Pha
se [d
eg]
Exp.FitComp.
X
DynamicsProbe

of the probe’s quality-factor. In FM-AFM, the probe’s resonance frequency, which shifts with the tip-sample gap, is directly measured. The AFM moves the probe to maintain a reference resonance frequency, corresponding to a fixed tip-sample gap. A review of FM and AM AFM methods is provided in reference [5]. We use the Akiyama probe for FM AFM in a manner similar to the design in [6]. To measure the probe’s resonance frequency, we condition the probe’s input such that it self-resonates at its shifting natural resonance frequency within the control bandwidth. FIGURE 2 shows a diagram of the self-resonance control system. To achieve sustained self-resonance, the loop phase must be zero (phase condition) and the loop gain must be one (amplitude condition) at the self-resonance frequency. We use an all-pass filter with a varying break frequency to empirically adjust the loop phase at the resonance frequency once for each probe. The loop gain is multiplicatively scaled by the amplitude controller to actively satisfy the amplitude condition and maintain the reference oscillation amplitude. We use a precision rectifier to measure the amplitude of oscillations. The amplitude controller, which is implemented using op-amps, consists of an integrator in series with a lead-lag compensator. In this configuration, the probe’s self-resonance frequency shifts with the tip-sample gap. FIGURE 3 shows the probe’s sensing curves, which we captured at different probe oscillation
current amplitudes. We recorded the probe’s self-resonance frequency over several approach-retract cycles. The retract curve is located below the approach curve and contains a discontinuity that is likely due to probe-sample adhesion. The probe’s sensitivity is inversely proportional to the oscillation amplitude. However, there is an oscillation amplitude limit below which we cannot sustain steady oscillations. This limit is 24nA for the probe under test that corresponds to a maximum sensitivity of 0.78 Hz/nm. SURFACE TRACKING CONTROL The surface tracking resolution depends on the resolution of self-resonance period estimation. We use a pre-amplification board, shielding on all signals, and signal conditioning buffers to obtain a high quality self-resonance signal. The sinusoidal self-resonance signal is digitized by a precision comparator. A 200-MHz digital timer implemented on an FPGA measures the interval (TSR) between the falling/rising edges of the digitized self-resonance signal (CLKSR) with a resolution of 5 ns. A timing error of 5 ns results in an edge rate estimation error of 50 Hz for a probe resonating at 50 kHz. A common way to enhance the resolution is to average the period of multiple cycles, but this would create phase lag. Instead, we use the tracking controller and the AFM plant’s low-pass dynamics to filter the period measurements. Converting the self-resonance period to a frequency value requires a non-linear division operation, which would mix the frequency content and prevent effective filtering of the noise. To avoid this, we use the self-resonance period as feedback. Furthermore, the measurement and the controller update rates must have an exact integer multiplicative relation to prevent creation of low frequency aliased components. The measurement updates at the
FIGURE 5. Diagram of the period estimation and controller blocks.
CLK200200-MHzedge timer CLKSR
TSR FIFO
Period Estimation
-
+
TREF
∫ notch filter
notchfilter
Tracking Control
VP
FIGURE 4. Bode plot of the open-loop (solid) and the compensated (dashed) tracking loop.
101
102
103
104
10-3
100
102
Mag
nitu
de
101
102
103
104
-270
-180
-90
0
Pha
se (d
eg)
Frequency [Hz]

changing CLKSR edge rate, which is not exactly known. To guarantee a perfect integer multiplicative relation between the controller sampling and the CLKSR, we sample the controller at the edges of CLKSR as well. FIGURE 4 shows the Bode plot of the open-loop and the compensated loop transfer functions from the piezo-driver command (VP) to the probe’s self-resonance period (TSR). The two open-loop resonances are structural modes of the HAFM and set the limit on the attainable closed-loop bandwidth. FIGURE 5 shows the period estimation and controller blocks. The controller uses an integrator to establish a -1 slope at cross-over, a low-pass filter to attenuate high frequency noise, and two notch filters to mask the structural resonances. The unity gain loop cross-over frequency is 100 Hz with 65 degrees of phase margin. EXPERIMENTAL RESULTS For the tracking controller’s unity cross-over frequency of 100 Hz, we tested HAFM’s noise and dynamic performance at a stationary sample point. FIGURE 6 shows the position noise when tracking a stationary sample. FIGURE 7 shows the step response of the
closed-loop system to a step disturbance added at the piezo driver input (VP). We also successfully tested the HAFM for imaging by integrating it with a Veeco MultiMode E scanner. FIGURE 8 shows the images of the TGZ01 and TGX01 gratings captured at 5 and 10 µm/s scan speeds respectively. The gratings are a product of MikroMasch. The TGZ01 is specified to have a channel height of 25.5±1 nm, which we measured as 25.6 nm on average. The TGX01 is designed for in-plane calibration and is not precise out of the plane. It is shown here as a sample with larger features. ACKNOWLEDGEMENT We thank Dr. Georg Fantner and Mr. Dan Burns for giving us access to their AFM scanner system and helping us with the imaging tests. This work was supported by the National Science Foundation (contract DMI-0506898). REFERENCES
[1] D. L. Ljubicic, "Flexural Based High Accuracy Atomic Force Microscope," 2008.
[2] R. J. Hocken, D. L. Trumper and C. Wang, "Dynamics and Control of the UNCC/MIT Sub-Atomic Measuring Machine," CIRP Ann. Manuf. Technol., vol. 50, pp. 373-376, 2001.
[3] T. Akiyama, U. Staufer and N. F. de Rooji, "Symmetrically Arranged Quartz Tuning Fork with Soft Cantilever for Intermittent Contact Mode Atomic Force Microscopy," Rev. Sci. Isnstrum., vol. 74, pp. 112, January 2003. 2003.
[4] T. R. Albrecht, P. Grutter, D. Horne and D. Rugar, "Frequency Modulation Detection Using High-Q Cantilevers for Enhanced Force Microscope Sensitivity," J. Appl. Phys. ; J. Appl. Phys., vol. 69, pp. 668-673, January 15, 1991. 1991.
[5] R. Garcia and R. Perez, "Dynamic atomic force microscopy methods," Surf. Sci. Rep., vol. 47, pp. 197-301, September. 2002.
[6] Nanosensors. (2009, 03-23). Akiyama-probe (A-probe) technical guide. pp. 1.
FIGURE 8. TGZ01 and TGX01 gratings imaged at 5 and 10 µm/s scan speeds respectively.
FIGURE 7. Tracking response to a step disturbance at piezo-driver’s input (VP).
0 5 10 150
50
100
Time [ms]
Pos
ition
[nm
]
1-kHz B.W.100-Hz B.W.
0 2.5 5-1
-0.5
0
0.5
1
Time [s]0 2.5 5
-1
-0.5
0
0.5
1
Time [s]
1-kHz B.W. 100-Hz B.W.P
ositi
on [n
m]
FIGURE 6. Tracking a stationary sample, noise is 0.24 and 0.12 nm RMS at 1000 and 100 Hz measurement bandwidths respectively.